Embed Size (px)
Citation preview
UNIVERSIDAD POLITECNICA SALESIANAUNIVERSIDAD POLITECNICA SALESIANA
FACULTAD DE INGENIERIASFACULTAD DE INGENIERIAS
ELECTRONICAELECTRONICA
ELECTRONICA ANALOGICA IIELECTRONICA ANALOGICA II
TEMA: TEMA:
CARROCARROCARROCARROCARROCARROCARRO SEGUIDOR CARRO SEGUIDOR SEGUIDOR SEGUIDOR SEGUIDOR SEGUIDOR SEGUIDOR SEGUIDOR
DE DE DE DE DE DE DE DE
LINEA NEGRALINEA NEGRALINEA NEGRALINEA NEGRALINEA NEGRALINEA NEGRALINEA NEGRALINEA NEGRA
INTEGRANTES:INTEGRANTES:
•• GUADALUPE IBAÑEZGUADALUPE IBAÑEZ
•• SANTIAGO AGUILAR SANTIAGO AGUILAR
•• CRISTIAN TOAPANTACRISTIAN TOAPANTA
•• ROBERTO GUALLICHICOROBERTO GUALLICHICO
20112011 – 2012– 2012
OBJETIVOS:OBJETIVOS:
General:General:
•• Realizar un robot seguidor de línea por medio de compuertas lógicas.Realizar un robot seguidor de línea por medio de compuertas lógicas.
Específicos:Específicos:
•• Conocer el funcionamiento del seguidor de línea y sus características de funcionamiento.Conocer el funcionamiento del seguidor de línea y sus características de funcionamiento.
•• Ensamblar un carro seguidor de líneas negra Ensamblar un carro seguidor de líneas negra y obtener un funcionamientoy obtener un funcionamiento
preciso del mismo.preciso del mismo.
INTRODUCCION:INTRODUCCION:
La robótica es una de La robótica es una de las aplicaciones más apasionantes de la electrónica. Un robotlas aplicaciones más apasionantes de la electrónica. Un robot
seguidor de línea se clasifica en el campo de la robótica móvil un seguidor de línea se clasifica en el campo de la robótica móvil un grupo de la rama degrupo de la rama de
robótica. La tarea fundamental de un robot móvil es el desplazamiento en un entornorobótica. La tarea fundamental de un robot móvil es el desplazamiento en un entorno
conocido o desconocido, por tanto es necesario que posea tres funciones fundamentales,conocido o desconocido, por tanto es necesario que posea tres funciones fundamentales,
la locomoción (nivel físico), la percepción (nivel sensorial) y la decisión (nivel dela locomoción (nivel físico), la percepción (nivel sensorial) y la decisión (nivel de
control). Entre las aplicaciones de robots control). Entre las aplicaciones de robots móviles se encuentra el transporte de móviles se encuentra el transporte de carga encarga en
la industria, robots desactivadores de explosivos, exploración de terrenos no aptos parala industria, robots desactivadores de explosivos, exploración de terrenos no aptos para
el hombre entre este ultimo podemos destacar los robots Spirit y Oportunityel hombre entre este ultimo podemos destacar los robots Spirit y Oportunity
desarrollados por la NASA.desarrollados por la NASA.
La estructura de un robot seguidor de línea puede ser elaborada de una lamina deLa estructura de un robot seguidor de línea puede ser elaborada de una lamina de
acrílico, aluminio o madera, que se acrílico, aluminio o madera, que se pueden conseguir fácilmente en el mercado. Estapueden conseguir fácilmente en el mercado. Esta
proporciona apoyo para los motores, el circuito impreso y la rueda libre.proporciona apoyo para los motores, el circuito impreso y la rueda libre.
MATERIALES Y EQUIPO:MATERIALES Y EQUIPO:
•• REGULACIÓN DE VOLTAJEREGULACIÓN DE VOLTAJE Bateria 9VBateria 9V
LM7805LM7805
Capacitor electrolítico de 10µf Capacitor electrolítico de 10µf
•• POR CADA SENSORPOR CADA SENSOR 2020
220220
10K10K
1K1K
2N39042N3904
Sensor QRD 1114Sensor QRD 1114
LED 5mm (indicador estado sensor)LED 5mm (indicador estado sensor)
•• PARA LÓGICA CUADRO NEGROPARA LÓGICA CUADRO NEGRO 74LS32 (compuerta OR)74LS32 (compuerta OR)
74LS14 (inversora-disparador Smith Trigger)74LS14 (inversora-disparador Smith Trigger)
•• CONTROL MOTORESCONTROL MOTORES L293D (driver de los motores)L293D (driver de los motores)
1N4004 (Diodo de protección de motores, 2 1N4004 (Diodo de protección de motores, 2 por cada motor)por cada motor)
•• ESTRUCTURA CARROESTRUCTURA CARRO Servomotores(2)Servomotores(2)
Rueda locaRueda loca
LlantasLlantas
Chasis (imaginaChasis (imagina
MARCO TEORICMARCO TEORIC
Dentro de los sistemas mecatDentro de los sistemas mecat
autónomas diseñadas para cuautónomas diseñadas para cu
definir como la unión de varidefinir como la unión de vari
correcta implementación de ccorrecta implementación de c
MECANICA:MECANICA:
•• CHASISCHASIS
El chasis del carro seguidoEl chasis del carro seguido
movilidad, para su construmovilidad, para su constru
lámina metálica, etc.) que slámina metálica, etc.) que s
motores y los sensores. Elmotores y los sensores. El
•• MOTORESMOTORESLos motores muestran la pLos motores muestran la p
utilizar motores con caja reutilizar motores con caja re
necesitan dos motor reductnecesitan dos motor reduct
ción del creador; acrílico, madera, aluminioción del creador; acrílico, madera, aluminio
::
ónicos más interesantes se encuentran los robotsónicos más interesantes se encuentran los robots
plir una tarea específica. Un carro seguidor de lplir una tarea específica. Un carro seguidor de l
s tecnologías como lo son mecánica, sensores ys tecnologías como lo son mecánica, sensores y
aada una podemos obtener resultados sorprendentda una podemos obtener resultados sorprendent
de línea es la de línea es la estructura destinada a brindarestructura destinada a brindar
ción se debe elegir un material resistente (acción se debe elegir un material resistente (ac
oporte el peso de la batería, el sistema de cooporte el peso de la batería, el sistema de co
iseño del chasis determina el ancho, largo yiseño del chasis determina el ancho, largo y
tencia y la velocidad con que se va a movertencia y la velocidad con que se va a mover
ductora que nos garanticen un buen torque,ductora que nos garanticen un buen torque,
res.res.
tc.)tc.)
maquinasmaquinas
ínea lo podríamosínea lo podríamos
lectrónica, con lalectrónica, con la
s.s.
os laos la
rílico, madera,rílico, madera,
trol, lostrol, los
alto del carro.alto del carro.
el carro, se sueleel carro, se suele
ara el carro seara el carro se
•• RUEDA LOCARUEDA LOCA
La dirección del carro en lLa dirección del carro en l
loca se coloca en la parte trloca se coloca en la parte tr
•• LLANTASLLANTAS
Las llantas deben ser prefeLas llantas deben ser prefe
pista.pista.
•• BATERIABATERIA
Al momento de escoger laAl momento de escoger la
va a trabajar, los elementosva a trabajar, los elementos
y los y los motores; cmotores; con on mayormayor
curvas y en las rectas se encuentra guiada pcurvas y en las rectas se encuentra guiada p
asera del chasis.asera del chasis.
iblemente de caucho, garantizando buena adiblemente de caucho, garantizando buena ad
atería es necesario saber a que voltaje y a qatería es necesario saber a que voltaje y a q
que consuque consumen men mayor amperamayor amperaje en el caje en el carrorro
oltaje obtenemos mayor velocidad para losoltaje obtenemos mayor velocidad para los
r una ruedar una rueda
hherencia a laerencia a la
e amperaje see amperaje se
on los sensoreson los sensores
otores.otores.
ELECTRONICA:ELECTRONICA:
•• CONTROL DE VOLTAJECONTROL DE VOLTAJE
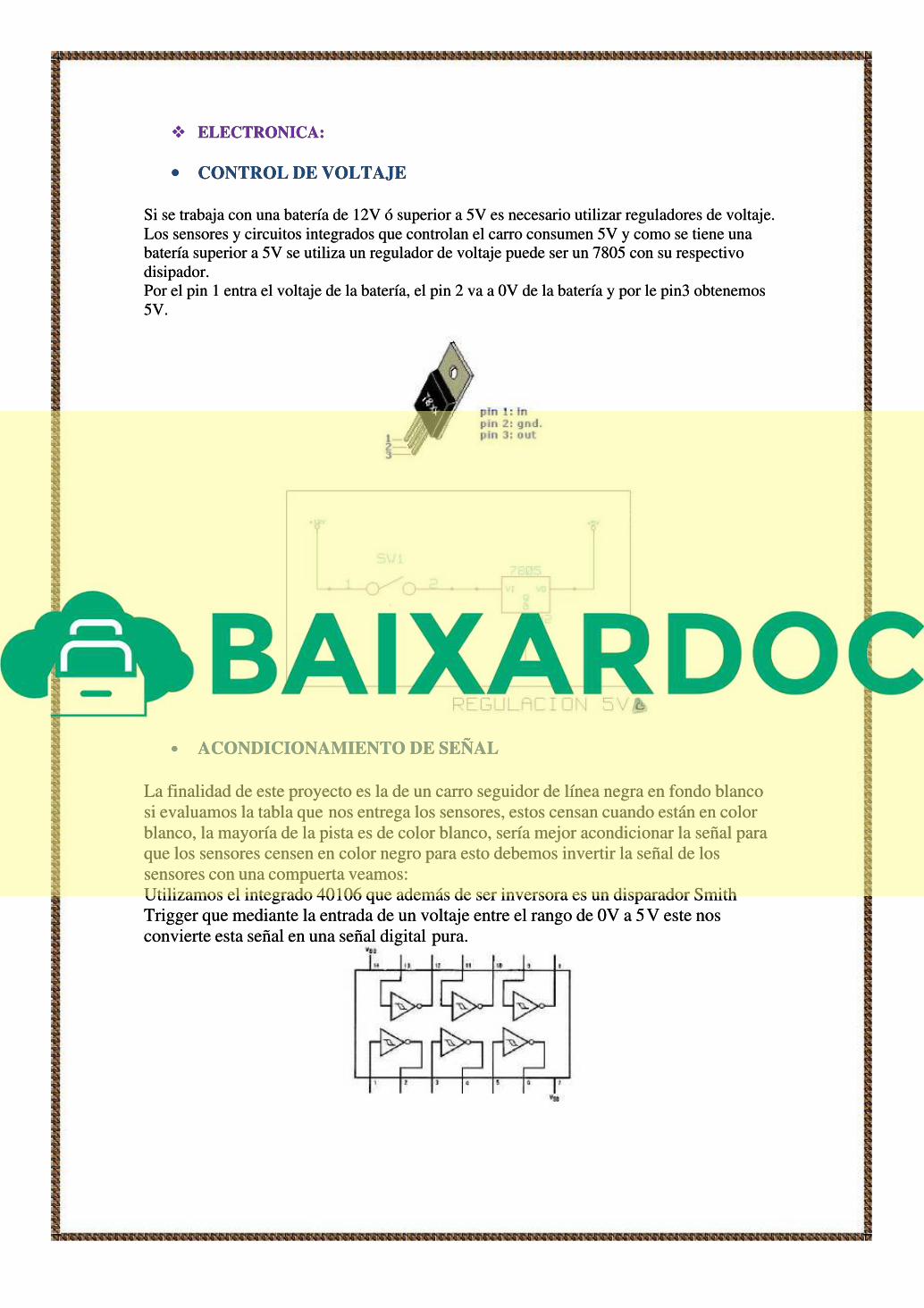
Si se trabaja con una batería de 12V ó superior a 5V es necesario utilizar reguladores de voltaje.Si se trabaja con una batería de 12V ó superior a 5V es necesario utilizar reguladores de voltaje.
Los sensores y circuitos integrados que controlan el carro consumen 5V y como se tiene unaLos sensores y circuitos integrados que controlan el carro consumen 5V y como se tiene una
batería superior a 5V se utiliza un regulador de voltaje puede ser un 7805 con su respectivobatería superior a 5V se utiliza un regulador de voltaje puede ser un 7805 con su respectivo
disipador.disipador.
Por el pin 1 entra el voltaje de la batería, el pin 2 va a 0V de la batería y por le pin3 obtenemosPor el pin 1 entra el voltaje de la batería, el pin 2 va a 0V de la batería y por le pin3 obtenemos
5V.5V.
•• ACONDICIONAMIENTO DE SEÑALACONDICIONAMIENTO DE SEÑAL
La finalidad de este proyecto es la de un carro seguidor de línea negra en fondo blancoLa finalidad de este proyecto es la de un carro seguidor de línea negra en fondo blanco
si evaluamos la tabla que si evaluamos la tabla que nos entrega los sensores, estos censan cuando están en colornos entrega los sensores, estos censan cuando están en color
blanco, la mayoría de la pista es de color blanco, sería mejor acondicionar la señal parablanco, la mayoría de la pista es de color blanco, sería mejor acondicionar la señal para
que los sensores censen en color negro para esto debemos invertir la señal de losque los sensores censen en color negro para esto debemos invertir la señal de los
sensores con una compuerta veamos:sensores con una compuerta veamos:
Utilizamos el integrado 40106 que además de ser inversora es un disparador SmithUtilizamos el integrado 40106 que además de ser inversora es un disparador Smith
Trigger que mediante la entrada de un voltaje entre el rango de 0V a 5Trigger que mediante la entrada de un voltaje entre el rango de 0V a 5V este nosV este nos
convierte esta señal en una señal digital convierte esta señal en una señal digital pura.pura.
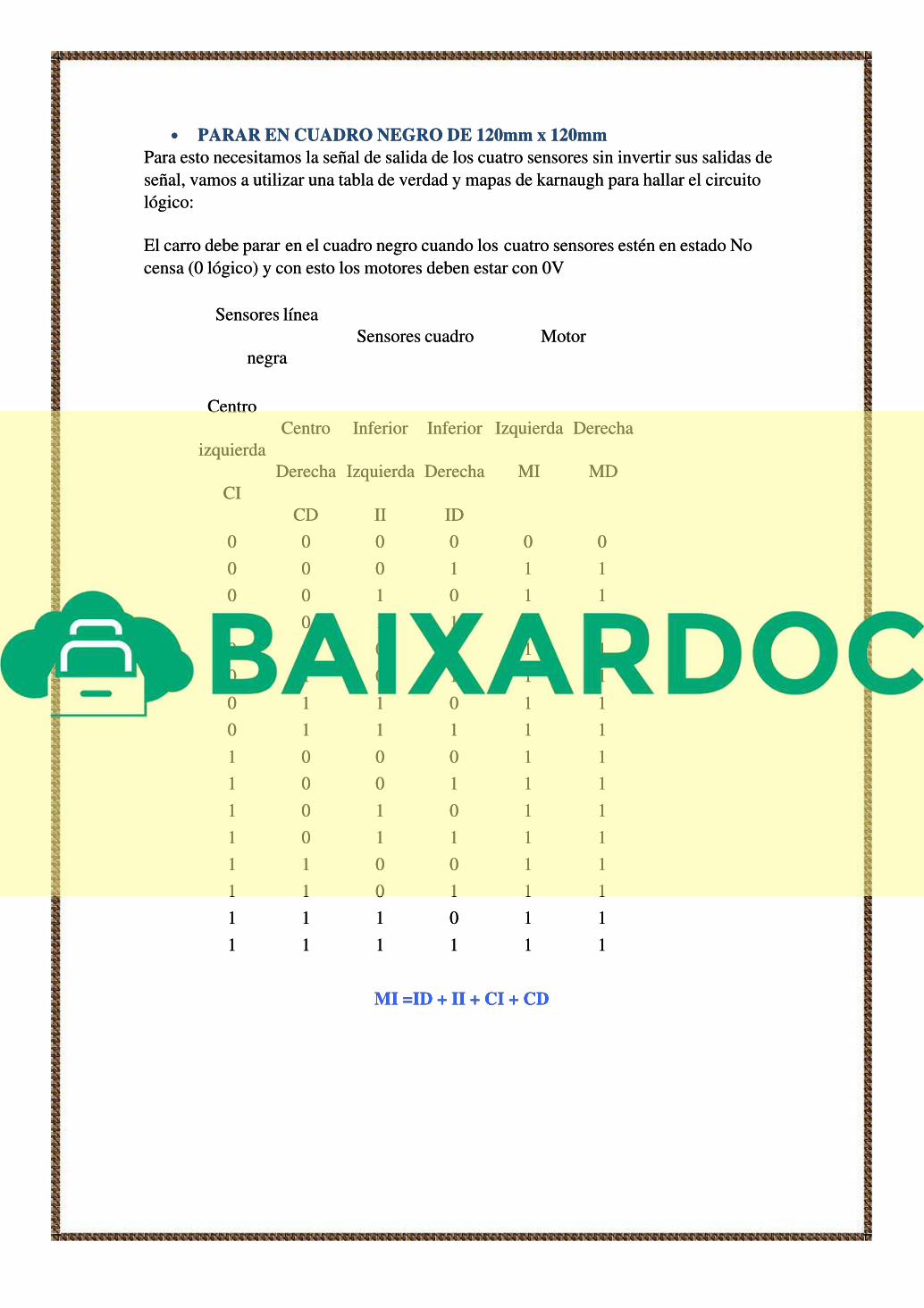
•• PARAR EN CUADRO NEGRO DE 120mm x 120mmPARAR EN CUADRO NEGRO DE 120mm x 120mmPara esto necesitamos la señal de salida de los cuatro sensores sin invertir sus salidas dePara esto necesitamos la señal de salida de los cuatro sensores sin invertir sus salidas de
señal, vamos a utilizar una tabla de verdad y mapas de karnaugh para hallar el circuitoseñal, vamos a utilizar una tabla de verdad y mapas de karnaugh para hallar el circuito
lógico:lógico:
El carro debe parar El carro debe parar en el cuadro negro cuando los en el cuadro negro cuando los cuatro sensores estén en estado Nocuatro sensores estén en estado No
censa (0 lógico) y con esto los motores deben estar con 0Vcensa (0 lógico) y con esto los motores deben estar con 0V
Sensores líneaSensores línea
negranegra
Sensores Sensores cuadro cuadro MotorMotor
CentroCentro
izquierdaizquierda
CICI
CentroCentro
DerechaDerecha
CDCD
InferiorInferior
IzquierdaIzquierda
IIII
InferiorInferior
DerechaDerecha
IDID
IzquierdaIzquierda
MIMI
DerechaDerecha
MDMD
0 0 0 0 0 00 0 0 0 0 0
0 0 0 1 1 10 0 0 1 1 1
0 0 1 0 1 10 0 1 0 1 1
0 0 1 1 1 10 0 1 1 1 1
0 1 0 0 1 10 1 0 0 1 1
0 1 0 1 1 10 1 0 1 1 1
0 1 1 0 1 10 1 1 0 1 1
0 1 1 1 1 10 1 1 1 1 1
1 0 0 0 1 11 0 0 0 1 1
1 0 0 1 1 11 0 0 1 1 1
1 0 1 0 1 11 0 1 0 1 1
1 0 1 1 1 11 0 1 1 1 1
1 1 0 0 1 11 1 0 0 1 1
1 1 0 1 1 11 1 0 1 1 1
1 1 1 0 1 11 1 1 0 1 1
1 1 1 1 1 11 1 1 1 1 1
MI =ID + II + CI + CDMI =ID + II + CI + CD
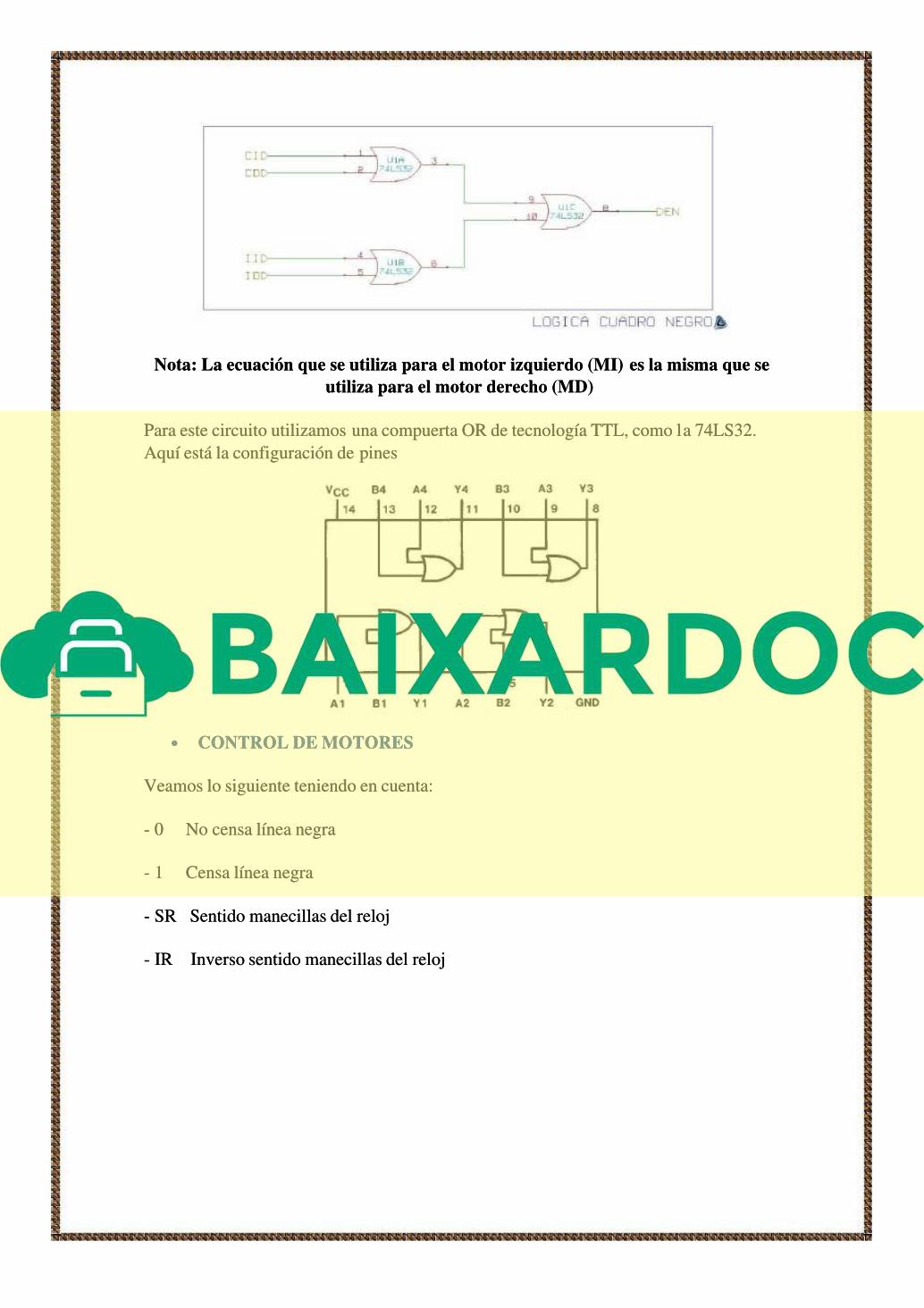
Nota: La ecuación que se utiliza para el motor izquierdo (MI) Nota: La ecuación que se utiliza para el motor izquierdo (MI) es la misma que sees la misma que seutiliza para el motor derecho (MD)utiliza para el motor derecho (MD)
Para este circuito utilizamos Para este circuito utilizamos una compuerta OR de tecnología TTL, como luna compuerta OR de tecnología TTL, como la 74LS32.a 74LS32.
Aquí está la configuración de Aquí está la configuración de pinespines
•• CONTROL DE MOTORESCONTROL DE MOTORES
Veamos lo siguiente teniendo en cuenta:Veamos lo siguiente teniendo en cuenta:
- - 0 0 No No censa censa línea línea negranegra
- - 1 1 Censa Censa línea línea negranegra
- - SR SR Sentido Sentido manecillas manecillas del del relojreloj
- - IR IR Inverso Inverso sentido sentido manecillas manecillas del del relojreloj
Sensor Sensor de de línea línea negra negra Motor Motor DirecciónDirección
CentroCentro
IzquierdaIzquierda
CICI
CentroCentro
DerechaDerecha
CDCD
IzquierdoIzquierdo
MIMI
DerechoDerecho
MDMD
CarroCarro
0 0 0 0 IR IR IR IR ReversaReversa
0 0 1 1 SR SR IR IR Curva Curva derechaderecha
1 1 0 0 IR IR SR SR Curva Curva izquierdaizquierda
1 1 1 1 SR SR SR SR AdelanteAdelante
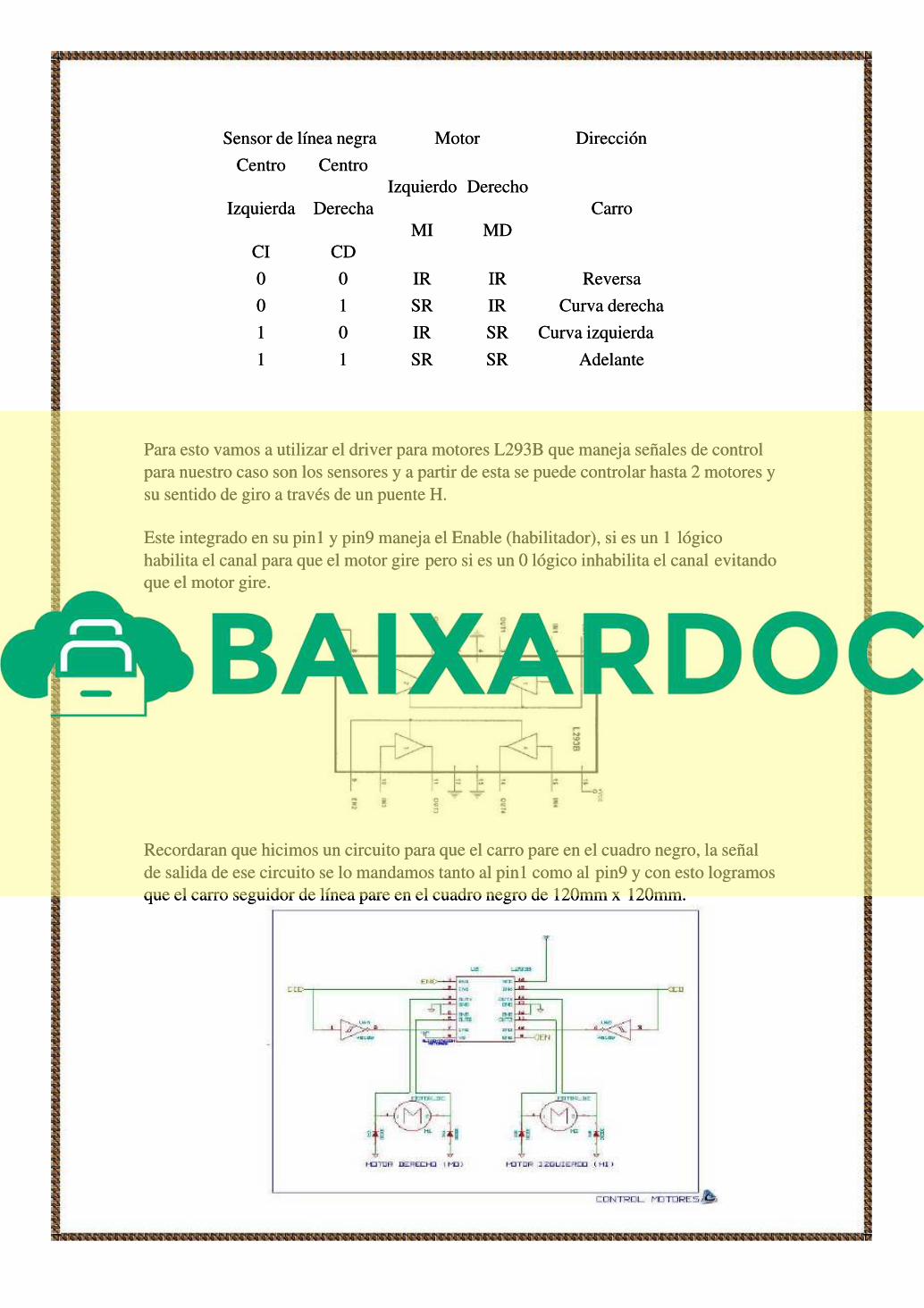
Para esto vamos a utilizar el driver para motores L293B que maneja señales de controlPara esto vamos a utilizar el driver para motores L293B que maneja señales de control
para nuestro caso son los sensores y a partir de esta se puede controlar hasta 2 motores ypara nuestro caso son los sensores y a partir de esta se puede controlar hasta 2 motores y
su sentido de giro a través de un puente H.su sentido de giro a través de un puente H.
Este integrado en su pin1 y pin9 maneja el Enable (habilitador), si es un 1 Este integrado en su pin1 y pin9 maneja el Enable (habilitador), si es un 1 lógicológico
habilita el canal para que el motor gire habilita el canal para que el motor gire pero si es un 0 lógico inhabilita el canal pero si es un 0 lógico inhabilita el canal evitandoevitando
que el motor gire.que el motor gire.
Recordaran que hicimos un circuito para que el carro pare en el cuadro negro, la señalRecordaran que hicimos un circuito para que el carro pare en el cuadro negro, la señal
de salida de ese circuito se lo mandamos tanto al pin1 como al de salida de ese circuito se lo mandamos tanto al pin1 como al pin9 y con esto logramospin9 y con esto logramos
que el carro seguidor de línea pare en el cuadro negro de 120mm x que el carro seguidor de línea pare en el cuadro negro de 120mm x 120mm.120mm.
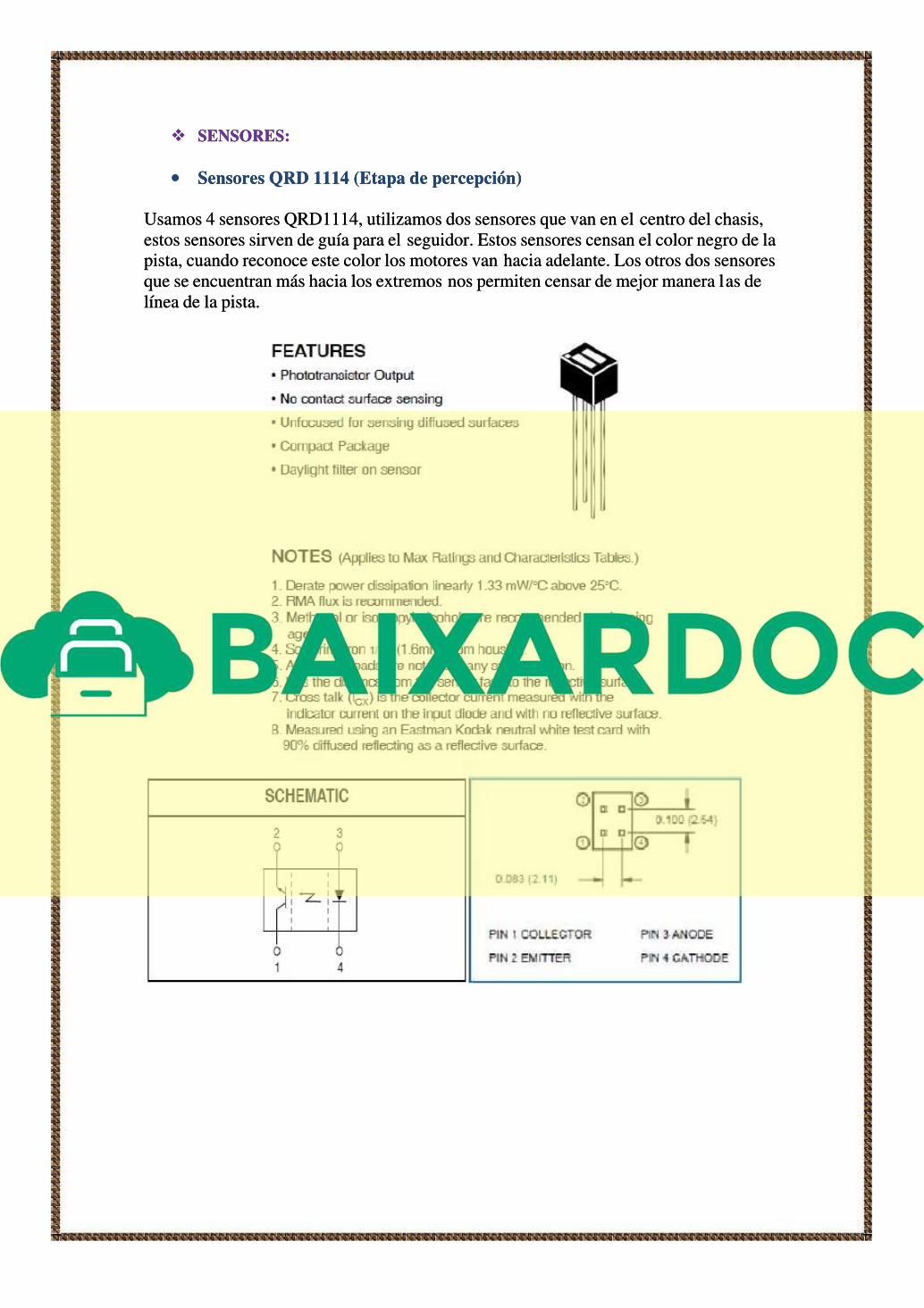
SENSORES:SENSORES:
•• Sensores QRD 1114 (Etapa de percepción)Sensores QRD 1114 (Etapa de percepción)
Usamos 4 sensores QRD1114, utilizamos dos sensores que van en el Usamos 4 sensores QRD1114, utilizamos dos sensores que van en el centro del chasis,centro del chasis,
estos sensores sirven de guía para el estos sensores sirven de guía para el seguidor. Estos sensores censan el color negro de laseguidor. Estos sensores censan el color negro de la
pista, cuando reconoce este color los motores van pista, cuando reconoce este color los motores van hacia adelante. Los otros dos sensoreshacia adelante. Los otros dos sensores
que se encuentran más hacia los extremos que se encuentran más hacia los extremos nos permiten censar de mejor manera lnos permiten censar de mejor manera las deas de
línea de la pista.línea de la pista.
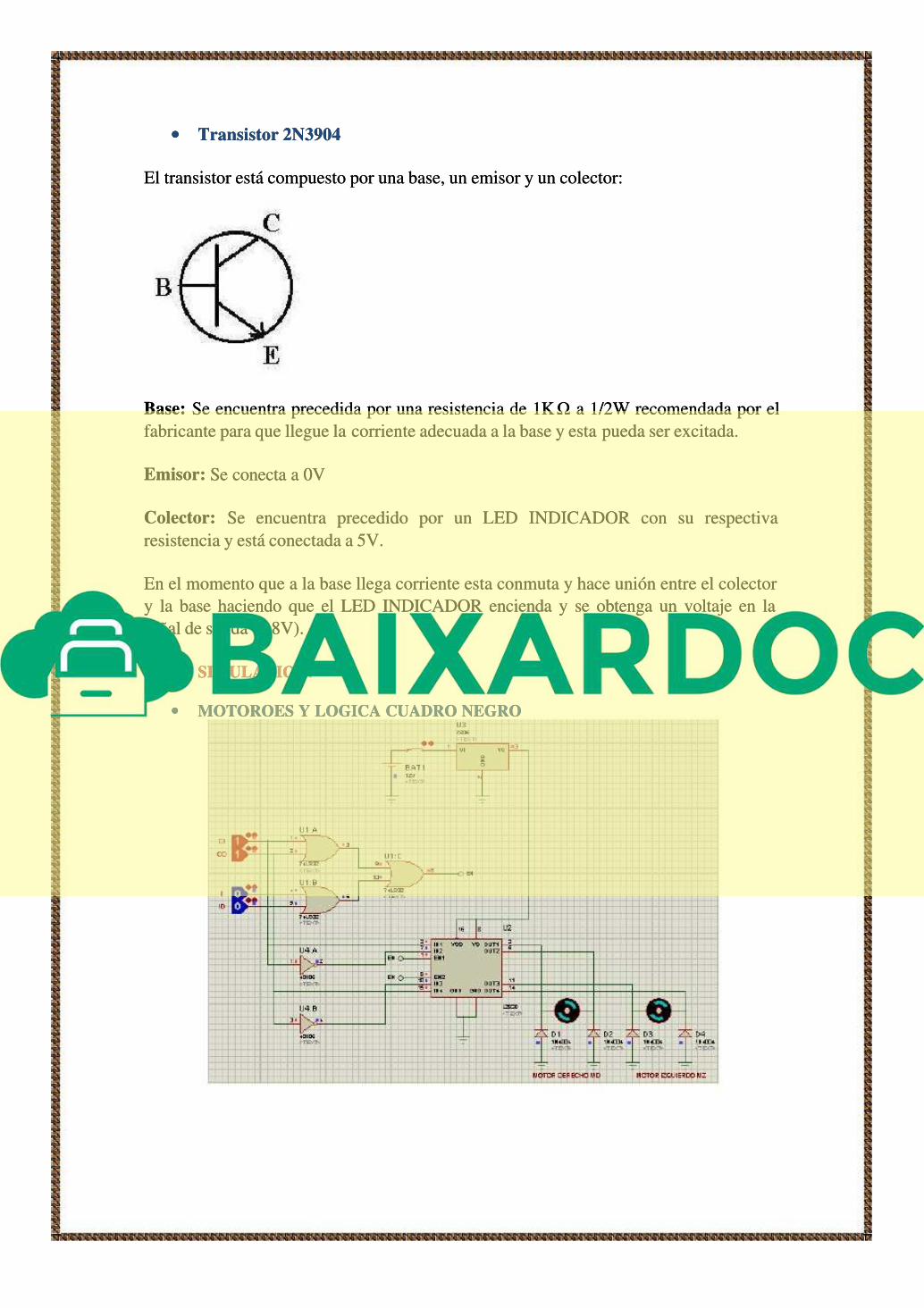
•• Transistor 2N3904Transistor 2N3904
El transistor está compuesto por una base, un emisor y un colector:El transistor está compuesto por una base, un emisor y un colector:
Base:Base: Se encuentra precedida por una resistencia de 1KSe encuentra precedida por una resistencia de 1K a 1/2W recomendada por ela 1/2W recomendada por el
fabricante para que llegue la fabricante para que llegue la corriente adecuada a la base y esta corriente adecuada a la base y esta pueda ser excitada.pueda ser excitada.
Emisor:Emisor: Se conecta a 0VSe conecta a 0V
Colector:Colector: Se encuentra precedido por un LED INDICADOR con su respectivaSe encuentra precedido por un LED INDICADOR con su respectiva
resistencia y está conectada a 5V.resistencia y está conectada a 5V.
En el momento que a la base llega corriente esta conmuta y hace unión entre el colectorEn el momento que a la base llega corriente esta conmuta y hace unión entre el colector
y la base haciendo que el LED INDICADOR encienda y se obtenga un voltaje en lay la base haciendo que el LED INDICADOR encienda y se obtenga un voltaje en la
señal de salida (3,8V).señal de salida (3,8V).
SIMULACION:SIMULACION:
•• MOTOROES Y LOGICA CUADRO NEGROMOTOROES Y LOGICA CUADRO NEGRO





























