Embed Size (px)
Citation preview

2004-01-2345
Use of a Thermal Manikin to Evaluate Human Thermoregulatory Responses in Transient, Non-Uniform, Thermal Environments
Copyright © 2004 SAE International
ABSTRACT
People who wear protective uniforms that inhibit evaporation of sweat can experience reduced productivity and even health risks when their bodies cannot cool themselves. This paper describes a new sweating manikin and a numerical model of the human thermoregulatory system that evaluates the thermal response of an individual to transient, non-uniform thermal environments. The physiological model of the human thermoregulatory system controls a thermal manikin, resulting in surface temperature distributions representative of the human body. For example, surface temperatures of the extremities are cooler than those of the torso and head. The manikin contains batteries, a water reservoir, and wireless communications and controls that enable it to operate as long as 2 hours without external connections. The manikin has 120 separately controlled heating and sweating zones that result in high resolution for surface temperature, heat flux, and sweating control. The physiological finite element model uses approximately 40,000 solid thermal and blood network elements to represent the human body. The manikin and physiological model demonstrate their value in evaluating the thermoregulatory response of a person in a protective uniform. They can also be used to evaluate the effectiveness of personal cooling systems.
INTRODUCTION
An objective of NREL’s manikin and model system is to predict the effect of thermal environments on human thermal physiology. The impermeable garment design of a protective suit diminishes the body's evaporative cooling capacity, sometimes severely. If heat cannot be
Robert B. Farrington, Ph.D., P.E. John P. Rugh, M.S.M.E.
Desikan Bharathan, Ph.D., P.E. National Renewable Energy Laboratory
Rick Burke, B.S.M.E. Measurement Technology Northwest
rejected by sweating, the body’s core temperature will increase, which will reduce response time, decrease mental capacity and accuracy, and have potentially adverse health effects without personal cooling systems. Additionally, the accumulation of sweat contributes to personal discomfort and premature aging of the garment ensemble.
Accurately modeling human heat loss in a transient, non-uniform thermal environment is difficult. Factors that contribute to the complexity include:
• Thermal radiation view factors. • Thermal radiation, convection, and conduction
between clothing layers. • Thermal and moisture capacitance of clothing. • Clothing to skin contact area. • Clothing to skin thermal resistance. • Clothing fit, including microvolumes. • Non-uniform thermal properties of clothing
ensembles. • Non-uniform, transient velocity field around the
body. • Modeling evaporation of sweat.
A thermal manikin and a finite element model of the human thermoregulatory system have been developed to simulate the thermal response of a person in a transient, non-uniform environment with multiple heat transfer modes: thermal radiation, natural and forced convection, conduction, and evaporation. A third computational tool predicts transient thermal sensation and comfort, locally and globally.
The thermal manikin, shown in Figure 1, is a sophisticated sensor with 120 independently controlled

Figure 1. Thermal Manikin, ADAM
zones. Using this manikin as a sensor integrates the complex clothing and environmental heat exchange factors into local heat loss measurements from the skin surface.
The physiological model can regulate the manikin for human-realistic spatial and temporal thermal response. The manikin can also be controlled with traditional regulation methods: constant skin temperature or constant heat flux that corresponds to metabolic activity level. Setpoints are individually adjustable for each of the 120 zone controllers. Volumetric sweating rates can
be specified separately for each zone.
The manikin can evaluate the thermoregulatory response of a person who is wearing (1) a moisture-impermeable suit used by first-responder personnel such as Hazmat, (2) a flight suit, and (3) a battle dress suit (Figure 2). Other applications include chemical-warfare suits, extravehicular activity (EVA) suits, and personal cooling systems used with such suits.
The manikin measures the heat loss in a thermal environment and sends the heat flux from each zone to the physiological model. The physiological model predicts the body’s response to the environment, determines 120 zone skin temperatures, sweat rates, and breathing rates, and transmits the data to the manikin. The psychological comfort model uses temperature data from the physiological model to predict the local and global thermal comfort as a function of local skin and core temperatures and their rates of change [Zhang et al. 2003].
THERMAL MANIKIN ADAM
ADAM (ADvanced Automotive Manikin) was developed to evaluate transient, non-uniform thermal environments in automobiles. He is a sophisticated surface sensor that interacts with his environment. He not only responds to thermal inputs such as radiation and convection, but also affects the environmental flow field and temperature field. The manikin was designed with the following general capabilities and characteristics:
• Detailed spatial and rapid temporal control of surface heat output and sweating rate.
Figure 2. Personal Protective Equipment (Class B Hazmat, Flight Suit, Battle Dress Uniform with Gas Mask)
• Surface temperature response time that approximates human skin.
• Realistic and uniform sweating. • Human-like geometry and weight with prosthetic
joints to simulate the human range of motion. • Breathing with inflow of ambient air and outflow
of warm, humid air at realistic human respiration rates.
• Complete self-containment, including battery power, wireless data transfer, and internal sweat reservoir for at least 2 h of use with no external connections.
• Rugged, durable, low-maintenance construction.
50The geometry of the manikin was designed to match the
th percentile American male. The manikin is approximately 175 cm tall. A Non-Uniform Rational B-Splines digital model of the human body was reshaped in CAD to comply with the 50th percentile target and allow the manikin to be manufactured with digital methods. He weighs approximately 61 kg.
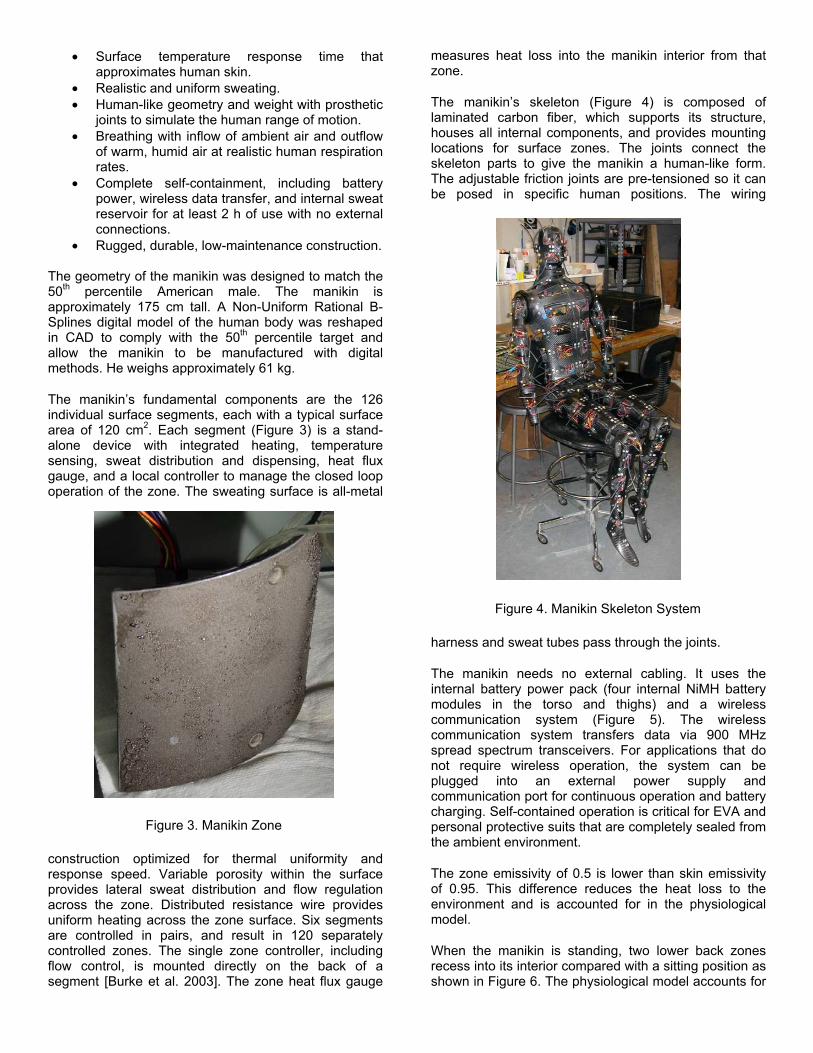
The manikin’s fundamental components are the 126 individual surface segments, each with a typical surface area of 120 cm2. Each segment (Figure 3) is a standalone device with integrated heating, temperature sensing, sweat distribution and dispensing, heat flux gauge, and a local controller to manage the closed loop operation of the zone. The sweating surface is all-metal
Figure 3. Manikin Zone
construction optimized for thermal uniformity and response speed. Variable porosity within the surface provides lateral sweat distribution and flow regulation across the zone. Distributed resistance wire provides uniform heating across the zone surface. Six segments are controlled in pairs, and result in 120 separately controlled zones. The single zone controller, including flow control, is mounted directly on the back of a segment [Burke et al. 2003]. The zone heat flux gauge
measures heat loss into the manikin interior from that zone.
The manikin’s skeleton (Figure 4) is composed of laminated carbon fiber, which supports its structure, houses all internal components, and provides mounting locations for surface zones. The joints connect the skeleton parts to give the manikin a human-like form. The adjustable friction joints are pre-tensioned so it can be posed in specific human positions. The wiring
Figure 4. Manikin Skeleton System
harness and sweat tubes pass through the joints.
The manikin needs no external cabling. It uses the internal battery power pack (four internal NiMH battery modules in the torso and thighs) and a wireless communication system (Figure 5). The wireless communication system transfers data via 900 MHz spread spectrum transceivers. For applications that do not require wireless operation, the system can be plugged into an external power supply and communication port for continuous operation and battery charging. Self-contained operation is critical for EVA and personal protective suits that are completely sealed from the ambient environment.
The zone emissivity of 0.5 is lower than skin emissivity of 0.95. This difference reduces the heat loss to the environment and is accounted for in the physiological model.
When the manikin is standing, two lower back zones recess into its interior compared with a sitting position as shown in Figure 6. The physiological model accounts for

Figure 5. Battery Pack Radio Water Storage
active and inactive zones, depending on the manikin’s posture.
The skin temperature of each zone is determined by an array of thermistors, typically four, on each zone. A heat flux gauge integrated onto the internal surface of each zone measures heat transfer between the surface zones and the internal body cavity of the manikin.
Testing of the assembled manikin is underway to calibrate regional heat loss and sweat dispensing rates. Following calibration, the manikin will be correlated with other manikins and human subject data for steady-state heat loss.
The breathing system will be installed in 2004. It will
permit inhalation and exhalation at a rate of 5 L/min. The breathing system can also permit continuous high levels of exhalation at 15 L/min. Humid, warm air is critical to evaluate sealed suits as breathing leads to moisture accumulation and heat gain into the enclosed environment.
PHYSIOLOGICAL MODEL OF THE HUMAN THERMOREGULATORY SYSTEM
The NREL Human Thermal Physiological Model, a three-dimensional transient finite element model, contains a detailed simulation of human internal thermal physiological systems and thermoregulatory responses. The model consists of a human tissue system and a thermoregulatory system. The thermoregulatory system controls physiological responses, such as vasomotor control, sweating, and shivering. The human tissue system represents the human body, including the physiological and thermal properties of the tissues. The model was developed with the commercially available finite element software ANSYS. This software can compute heat flow by conduction, convection, and mass transport of the fluid, which makes it practical for simulating human heat transfer.
Human thermal response to an environment consists of convection within the circulatory and respiratory systems, and conduction within the tissues. The arms and legs consist of bone, muscle, fat, and skin. There are additional lung, abdominal, and brain tissues in the torso and head zones. The model calculates the conduction heat transfer based on the temperature gradients between the tissue nodes.
Circulation heat transfer is modeled with a right-angled network of pipe elements within each body zone. The diameter of the pipes decreases from the center of each zone outward toward the skin and extremities. The flow in the pipes is modeled as Poiseuille flow, and a
Figure 6. Recessed Manikin Zones

convection coefficient is solved at each node in the pipe network. The diameters of the pipes in the skin layer can constrict or dilate depending on temperature. The equations that control vasoconstriction/dilation are based on medical experiments [Smith 1991].
The human thermoregulatory system is modeled with vasoconstriction/dilation, sweating, shivering, and metabolic changes. The vasoconstriction/dilation response varies with skin and core temperatures, and with each body zone, because of the diameters of the pipes. The sweating response is a function of skin and core temperatures, and the number of sweat glands in each zone. The degree of shivering depends on skin and core temperatures, and the amount of muscle in each zone. The cardiac output or flow through the pipe network is a function of the metabolic rate and skin and core temperatures [Smith 1991].
The physiological model was generated in sections with ANSYS. The sections consist of hand, lower arm, upper arm, foot, lower leg, and thigh, one each for the left and right sides. The body is developed as a torso together with neck and head. The limbs consist of bone, muscle, fat, and skin. Each surrounds the previous layer. Special tissues for abdomen, lungs, and brain are introduced in the torso and head volumes. Each part is generated individually and populated with arteries and veins. The primary blood vessels join via capillaries placed adjacent to the skin layer. The blood vessel diameters are sized to allow blood to flow to each body part at an overall nominal pressure difference of 70 mmHg between the blood supply and return. The tissues are modeled with ANSYS Solid70 elements, and the blood flow pipes use Fluid116 elements. Tissue properties are taken from tables provided by Gordon et al. [1976]. The overall masses and mass distribution for each part in the model compare favorably to those of a human. Deviations are nominally less than 5%.
Each body part is connected to its adjacent part with veins and arteries. In the limbs, the tissues are not connected between parts. In the torso, which is modeled as an integral part, all tissues are connected. An additional pipe network to simulate airflow through the trachea and lungs is included in the torso.
The overall model consists of approximately 40,000 nodes and elements. Because the model is very detailed, we can see a fairly complete picture of temperature distribution. An example for the hand is shown in Figure 7. For this simulation, blood flows into the supply arteries at 1380 cc/h at 37°C. The hand’s muscle and skin tissues generate heat at 750 W/m3 and 1005 W/m3, respectively. The hand is exposed to a lower temperature environment that is applied as a heat loss of 100 W/m2 on its exposed surfaces. The resulting temperature distribution on the external surfaces is shown in Figure 7. The tip of the smallest finger attains the lowest temperature; the palm remains warm.
Figure 7. Hand Skin Temperature Distribution
Figure 8 shows the temperature distribution over the body as well as a cross-sectional view of the torso. The abdomen is warmer because of internal heat generation and relative isolation from the environment. The lung area remains cool because of breath flow. The brain mass reaches a moderate temperature between the two.
Given a set of heat flux boundary conditions on the skin, the model currently requires about 2 min to converge at the steady-state temperature distribution. We expect to reduce this time to 1 min by streamlining the model and eliminating the large amount of input/output that occurs during a normal ANSYS run.
Figure 8. Body Core Temperature Distribution
In principle, the physiological model can operate independently of the manikin. However, detailed knowledge of the transient, non-uniform, thermal environment is required. For example, all the view factors for thermal radiation must be specified, local evaporation rates determined, clothing properties (including fit, thermal resistance, thermal and moisture capacitance, microvolumes, etc.) specified, a detailed
transient flow field calculated, etc. With the physiological model capabilities, the manikin responds to and interacts with the thermal/fluid environment.
HUMAN THERMAL COMFORT EMPIRICAL MODEL
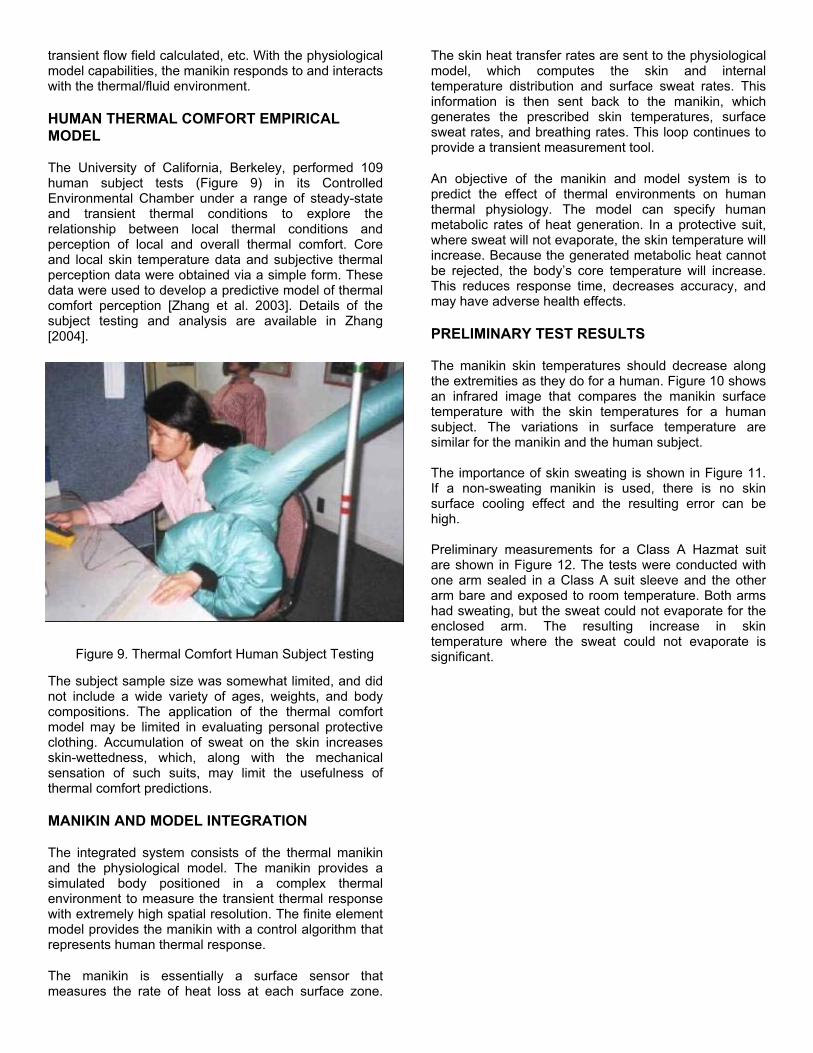
The University of California, Berkeley, performed 109 human subject tests (Figure 9) in its Controlled Environmental Chamber under a range of steady-state and transient thermal conditions to explore the relationship between local thermal conditions and perception of local and overall thermal comfort. Core and local skin temperature data and subjective thermal perception data were obtained via a simple form. These data were used to develop a predictive model of thermal comfort perception [Zhang et al. 2003]. Details of the subject testing and analysis are available in Zhang [2004].
Figure 9. Thermal Comfort Human Subject Testing
The subject sample size was somewhat limited, and did not include a wide variety of ages, weights, and body compositions. The application of the thermal comfort model may be limited in evaluating personal protective clothing. Accumulation of sweat on the skin increases skin-wettedness, which, along with the mechanical sensation of such suits, may limit the usefulness of thermal comfort predictions.
MANIKIN AND MODEL INTEGRATION
The integrated system consists of the thermal manikin and the physiological model. The manikin provides a simulated body positioned in a complex thermal environment to measure the transient thermal response with extremely high spatial resolution. The finite element model provides the manikin with a control algorithm that represents human thermal response.
The manikin is essentially a surface sensor that measures the rate of heat loss at each surface zone.
The skin heat transfer rates are sent to the physiological model, which computes the skin and internal temperature distribution and surface sweat rates. This information is then sent back to the manikin, which generates the prescribed skin temperatures, surface sweat rates, and breathing rates. This loop continues to provide a transient measurement tool.
An objective of the manikin and model system is to predict the effect of thermal environments on human thermal physiology. The model can specify human metabolic rates of heat generation. In a protective suit, where sweat will not evaporate, the skin temperature will increase. Because the generated metabolic heat cannot be rejected, the body’s core temperature will increase. This reduces response time, decreases accuracy, and may have adverse health effects.
PRELIMINARY TEST RESULTS
The manikin skin temperatures should decrease along the extremities as they do for a human. Figure 10 shows an infrared image that compares the manikin surface temperature with the skin temperatures for a human subject. The variations in surface temperature are similar for the manikin and the human subject.
The importance of skin sweating is shown in Figure 11. If a non-sweating manikin is used, there is no skin surface cooling effect and the resulting error can be high.
Preliminary measurements for a Class A Hazmat suit are shown in Figure 12. The tests were conducted with one arm sealed in a Class A suit sleeve and the other arm bare and exposed to room temperature. Both arms had sweating, but the sweat could not evaporate for the enclosed arm. The resulting increase in skin temperature where the sweat could not evaporate is significant.

Figure 10. Infrared Image of Manikin and Human
Figure 11. Impact of Non-Sweating Skin

Figure 12. Hazmat Class A, Arm Skin Temperature
CONCLUSION
A next-generation manikin has been developed to respond to and interact with a transient, non-uniform thermal environment. This self-contained manikin has high spatial resolution, a reasonable response time, and realistic and uniform sweating rates. A physiological model was developed that mimics human thermal responses. Although not discussed in detail here, a thermal comfort model has also been developed.
Preliminary testing with infrared imaging has demonstrated similar temperatures between the manikin surface and human subject skin. Testing under thermal radiation demonstrates the need to include sweating in manikin testing, in cases where sweat evaporates and cools the skin.
In cases where evaporation of sweat is impeded, skin and body core temperatures increased.
The manikin and physiological model are new tools that will be useful in predicting the thermoregulatory response of a person in a protective uniform. They can also evaluate the effectiveness of personal cooling systems used with these types of suits. Those who design and evaluate protective clothing, such as that used by the military, NASA, and first-responders, will find these new tools useful.
ACKNOWLEDGMENTS
The authors gratefully acknowledge the support of the U.S. Department of Energy in developing, fabricating, and testing the thermal manikin and physiological model. DOE’s Office of FreedomCAR and Vehicle Technologies (OFCVT) supported this work. The authors appreciate the support of Roland Gravel, DOE Program Manager; Terry Penney, NREL’s OFCVT Technology Manager; and Barbara Goodman, Director of the Center for Transportation Technologies and Systems.
REFERENCES
1. Burke, R.; Rugh, J.; and Farrington R. (2003) ADAM – the Advanced Automotive Manikin, 5th International Meeting on Thermal Manikins and Modeling, Strasbourg, France.
2. Gordon, R. G.; Roemer, R. B.; and Horvath, S. M. (1976) A Mathematical Model of the Human Temperature Regulatory System – Transient Cold Exposure Response. IEEE Transactions on Biomedical Engineering 23, no. 6: 434-444.
3. Smith, C. E. (1991) A Transient, Three-Dimensional Model of the Human Thermal System. PhD Thesis, Kansas State University.
4. Zhang, H.; Huizenga, C.; and Arens E. (2003) Thermal Sensation and Comfort in a Transient Non-Uniform Thermal Environment, 5th International Meeting on Thermal Manikins and Modeling, Strasbourg, France.

5. Zhang, H.; (2004) Human Thermal Sensation and Comfort in Transient and Non-Uniform Thermal Environments, Ph.D. Thesis, U.C. Berkeley.
CONTACTS
Robert B. Farrington, Ph.D., P.E., manages the Advanced Vehicle Systems (AVS) Group for the National Renewable Energy Laboratory’s (NREL) Center for Transportation Technologies and Systems. The AVS Group works on advanced power electronics, vehicle ancillary loads, heavy hybrid vehicles, vehicle modeling, and energy storage systems. He can be reached at: [email protected]
John Rugh, M.S.M.E., leads the vehicle ancillary loads reduction task at NREL. The objective of the project is to reduce fuel used for vehicle ancillary loads by reducing thermal loads, improving delivery efficiency, and increasing equipment efficiency including using engine waste heat to provide cabin cooling. He can be reached at: [email protected]
Desikan Bharathan, Ph.D., P.E., is a heat transfer and fluid dynamics expert. He has contributed to ocean thermal energy conversion systems, geothermal systems, building systems, and vehicle systems. He can be reached at: [email protected]
Richard A. Burke, B.S.M.E., is Vice President at MTNW in charge of the biophysical instrumentation department. Since joining the company in 1989, he has played a key role in the development of a growing line of high-accuracy biophysical test equipment. His broad expertise includes manikin fabrication methods, biophysical testing, and imbedded control systems. He can be reached at: [email protected]
ADDITIONAL SOURCES
NREL: http://www.nrel.gov
Vehicle Ancillary Loads: http://www.ott.doe.gov/coolcar/
MTNW: http://www.mtnw-usa.com/aboutmtnw/



![Building and Environment - cfdResearch › files › pdfs › 2013_Numerical... · Critical area abstract Our previous study [1] demonstrated that for a thermal manikin in a horizontal](https://img.pdfslide.net/doc/110x75/5ed82fa40fa3e705ec0dff1a/building-and-environment-a-files-a-pdfs-a-2013numerical-critical-area.jpg)

























