Embed Size (px)
Citation preview

Use of ground based GNSS datain NWP at Météo-France
Patrick Moll1 , Paul Poli2 and Véronique Ducrocq1
1 Centre National de Recherches Météorologiques CNRS/GAME, Toulouse, France
2 ECMWF, Reading, UK

E-GVAP workshop Copenhagen, 6 nov. 2008
2
Outline
1. Status of ground-based GPS ZTD assimilation at Météo-France
3. Implementation method of ground based GPS ZTD
5. Monitoring and use of ground based GPS ZTD
7. Impact of the ground based GPS ZTD in the operational models
9. Conclusion

1. Status of ground-based GPS ZTD in the assimilation systems at Météo-France

E-GVAP workshop Copenhagen, 6 nov. 2008
4
The operational assimilations at Météo-France
ARPEGE
ALADIN
Global model and 4DVAR assimilation system ARPEGE– Vertical: 60 levels, model top at 0.1 hPa (~65 km altitude)– Horizontal: T538, stretched model: highest horizontal resolution over France (~15 km)– 4DVAR assimilation (non-stretched) with two minimizations: T107 / T224– Analysis horizontal resolution is about 90 km (globally)– Assimilates European GPS ZTD data since 19 September 2006– Note: there are still operational runs of our non-stretched global model
European limited-ared model and 3DVAR assimilation system ALADIN
– Horizontal resolution 9.5 km, same vertical levels as ARPEGE– 3DVAR assimilation with 1 minimization at full resolution (6h period)– One version running over France– Assimilates European GPS ZTD data since 19 September 2006– Other versions running for La Réunion Island (Eastern Indian Ocean) and specific areas of interest : do not assimilate any GPS ZTD data
High-resolution mesoscale non-hydrostatic model with a 3DVAR assimilation system AROME over France
– Horizontal resolution 2.5 km, 41 levels– 3DVAR assimilation with 1 minimization at full resolution (3h period)– Assimilates European GPS ZTD data over France since 22 April 2008
AROME

2. Implementation method of ground-based GPS ZTD

E-GVAP workshop Copenhagen, 6 nov. 2008
6
The specificity of E-GVAP ZTD data
E-GVAP ZTD data are a special kind of meteorological data :– Processing upgrades, network expansion, new analysis centers…
• List of station identifiers (STATCENT) evolves in time• Global improvement of the quantity and quality of data, but still sudden modifications
Objectives :1. Be able to use GPS ZTD data operationally2. Be able to monitor the improvements in GPS ZTD data
Corresponding requirements– Objective 1: approximately stable data quality and quantity (we cannot assimilate data
whose data quality and quantity evolve too much in time)– Objective 2: acceptance by the screening phase of ALL ZTD data arriving to us (we want to
monitor all the data in order to build up statistics and follow evolutions)
Problem:– Objectives 1 and 2 are not easy to reconcile…

E-GVAP workshop Copenhagen, 6 nov. 2008
7
Usual data filtering solutions at MF
« Black list method »– Default behaviour is that all data are active, that is, intended for assimilation– Black list:
• Filter that makes data originating from suspicious sites/sources passive– Typically used for
• Radiosonde data• Ground data• Satellite remote sensing channels/frequencies which we cannot model properly
– Problem with that method• Only works if one knows the complete list of data providers beforehand
Because of the increasing number of sites, GPS ZTD data required a different approach
« White list method »– Default behaviour is that all data are passive, that is, excluded from assimilation– White list:
• Filter that makes data originating only from trusted sites active– First and only application so far : GPS ZTD– We have to upgrade this white list regularly

E-GVAP workshop Copenhagen, 6 nov. 2008
8
Selection rules for European ZTD
Station location– Station is located in, or close to, Europe (i.e. no isolated stations outside Europe)– Station altitude is below xx meters altitude, within yy meters of the model orography– Next closest station is located more than zz km away, and station coordinates do not change over time
Quantity– Data from the station are present more than 50% of the time
Quality– Observation minus background departures for the station are gaussian with a χ2-test
• Parameters: threshold: 0.1%; nbins=70, or less if ndata in any bin < 10
– Absolute bias must be less than 20 mm and stdev less than 30 mm
Timeseries considered to carry out this selection– At least 10 days long– Must contain different weather types, ideally a combination of dry and wet events– Avoid really wet events because our models are not such good references then
Notes:– Thresholds xx, yy, zz are model-dependent– For the 4DVAR assimilation, we exclude data at 60 minute freq. (not sure of the exact time of these
data)– If there are several analysis centers meeting all the criteria for a given station:
• Retain the one for which observation minus background standard deviation is the smallest, if the difference is more than 0.2 mm with the other centers, otherwise:
• Retain the one for which max (observation minus background standard) minus min (observation minus background standard) per period is smallest, if the difference is more than 5 mm with the other centers, otherwise: (last resort)
• Retain the one which presents the most stable bias (smallest stdev of the mean as calculated per period)

E-GVAP workshop Copenhagen, 6 nov. 2008
9
Monitoring of stations solutions over ~FranceExample: standard deviations
E-GVAP workshop Copenhagen, 6 nov. 2008
10
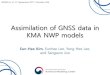
Analysis/production data flow
GPS stations
Analysis centres(SGN, METO, GFZ, …)
GTSRaw data bufr

E-GVAP workshop Copenhagen, 6 nov. 2008
11
GPS ZTD data flow at Météo-France
« Active » observations « Passive » observations
Observations
Observation Database
GTS
ASSIMILATION
Background: forecast
Obs. Extraction
MONITORING ONLY
GPS ZTD Pre-processing
Screening (compare obs with background)

3. Monitoring and use of ground-based GPS ZTD

E-GVAP workshop Copenhagen, 6 nov. 2008
13
Monitoring example (time-series)
DPREVI/COMPAS

E-GVAP workshop Copenhagen, 6 nov. 2008
14
Monitoring example (time-series)
DPREVI/COMPAS

E-GVAP workshop Copenhagen, 6 nov. 2008
15
Monitoring example (time-series)
DPREVI/COMPAS
E-GVAP workshop Copenhagen, 6 nov. 2008
16
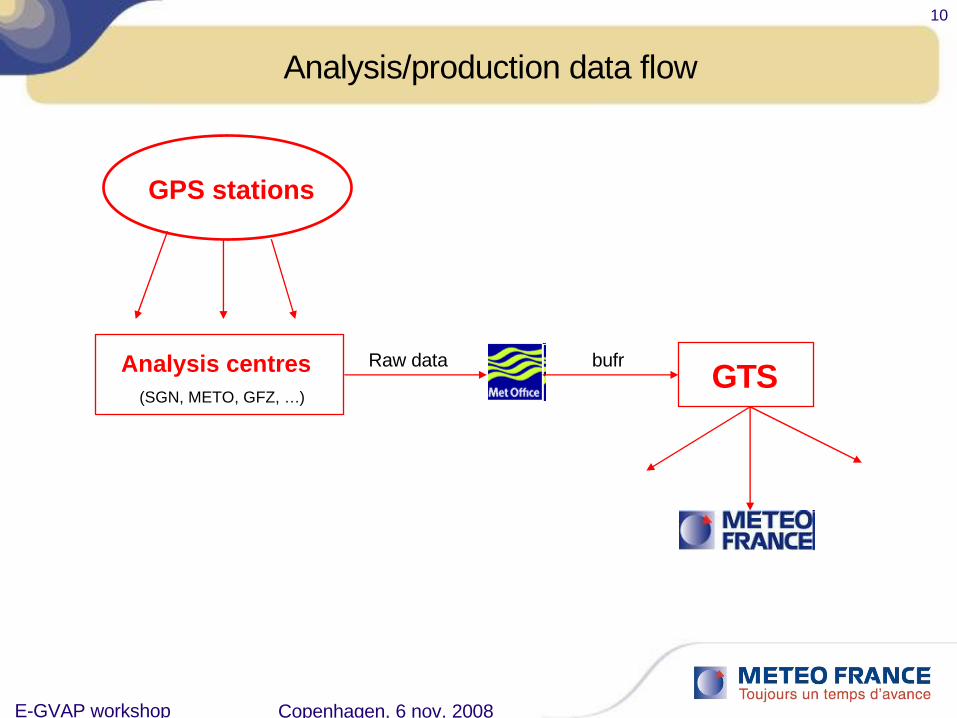
Monitoring example (problem detection)
DPREVI/COMPAS

E-GVAP workshop Copenhagen, 6 nov. 2008
17
The EGVAP monitoring
Europe SGN

E-GVAP workshop Copenhagen, 6 nov. 2008
18
The EGVAP monitoring
E-GVAP workshop Copenhagen, 6 nov. 2008
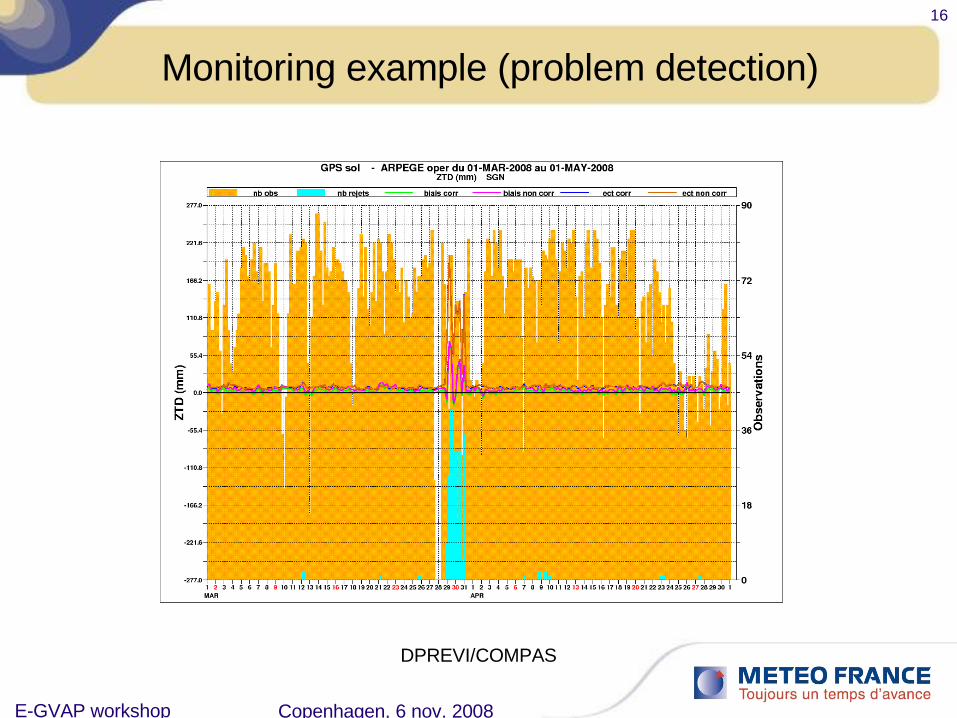
19
Global minimisation of a cost function:
J(X) = Jo(X) + Jb(X)
The “problem” of cut off in the 4DVAR
21h 00h 03h
Jb
Jo
Jo
Jo
obs
obs
obs
analysis
xa
xb
guess
Short cut off

E-GVAP workshop Copenhagen, 6 nov. 2008
20
Current operational selection list for ARPEGE [global model with analysis at 90 km resolution]
58 stations, station inter-distance : 100 km

E-GVAP workshop Copenhagen, 6 nov. 2008
21
Example of data usage (ARPEGE)
ARPEGE at 00H
(6h period, long cut-off)

E-GVAP workshop Copenhagen, 6 nov. 2008
22
Example of data usage (ARPEGE)
ARPEGE at 00H
(6h period, short cut-off)
E-GVAP workshop Copenhagen, 6 nov. 2008
23
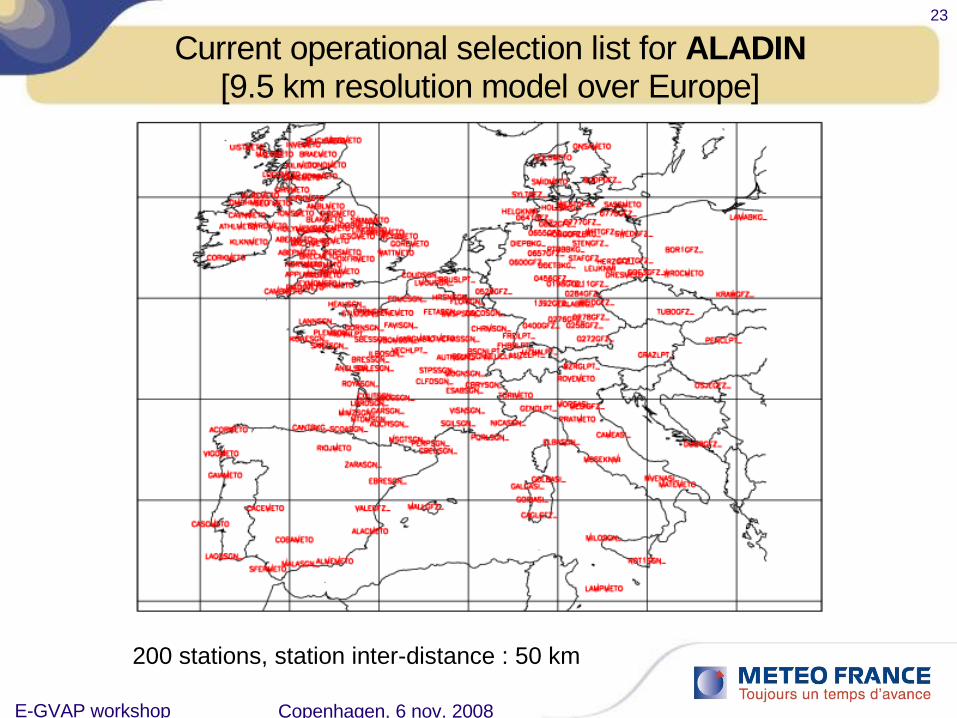
Current operational selection list for ALADIN[9.5 km resolution model over Europe]
200 stations, station inter-distance : 50 km

E-GVAP workshop Copenhagen, 6 nov. 2008
24
Example of data usage (ALADIN)
ALADIN at 00H
(6h period)
169
E-GVAP workshop Copenhagen, 6 nov. 2008
25
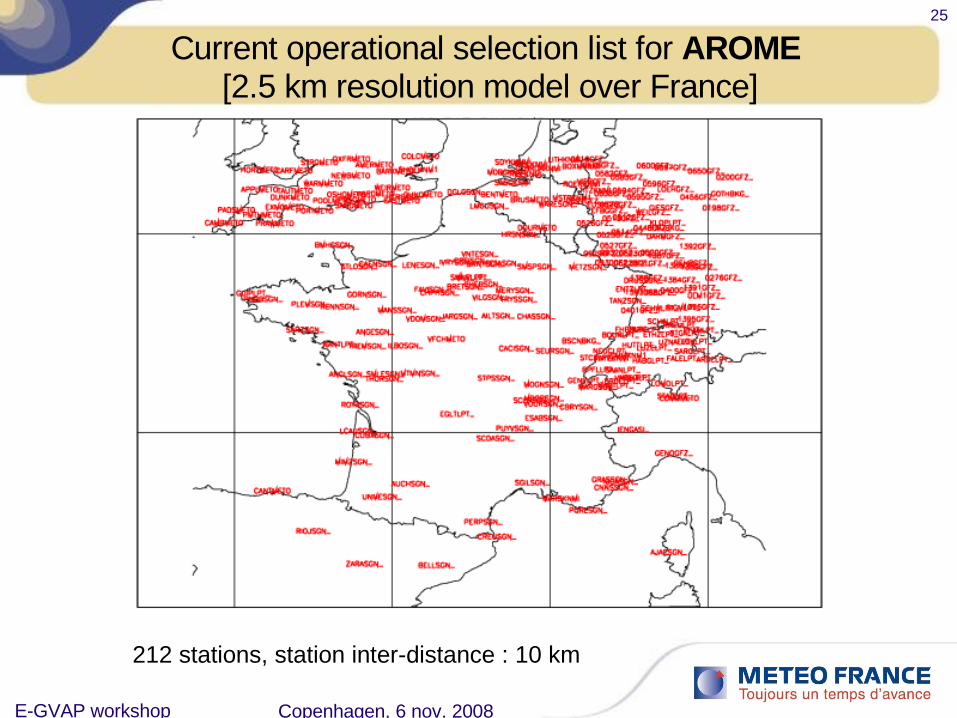
Current operational selection list for AROME [2.5 km resolution model over France]
212 stations, station inter-distance : 10 km

E-GVAP workshop Copenhagen, 6 nov. 2008
26
Example of data usage (AROME)
AROME at 00H
(3h period)

4. Impact of the ground-based GPS ZTD in the operational models

E-GVAP workshop Copenhagen, 6 nov. 2008
28
Relative weight of GPS ZTD data in our assimilation system
Data assimilation system:– A competitive environment– Not all data are equal– Unfair competition: we attribute the
weights -- not [yet] an automatic and dynamic process
Periodically evaluate the Degrees of Freedom for Signal (DFS)
Methodology:– Generate perturbed observations– Assimilate these observations– Compare the analysis with that
obtained with un-perturbed observations; in observation space
– Difference indication of how much each data influences the analysis
Weather stations, buoys, …
Commer-cial
aircraft
Upper-air in situ and
remote obs.
Cloud-track and
water vapor
tracking imagery, scattero-meters
Passive IR and MW
radiancesBending angles
Hyper-spectral infrared (AIRS &
IASI)
ARPEGE
GPS ZTD : 0.0830

E-GVAP workshop Copenhagen, 6 nov. 2008
29
Impact on AROME forecast (OSE experiment)
Cumulated rainfall between 03UTC and 15UTC, 19 july 2008
WITHOUT ZTD dataassimilation
AROME, 15h forecast starting from the 00UTC analysis, 19 july 2008
WITH ZTD dataassimilation
Observations

5. Conclusions

E-GVAP workshop Copenhagen, 6 nov. 2008
31
ConclusionsGPS ZTD operational assimilation
– Started at Météo-France more than 2 years ago– Initially in global and European models– Now in operational mesoscale AROME model
Methodology– Chose a « white list » approach to accomodate expanding/improving
networks/methods
All GPS-related problems were solved rapidly by E-GVAP
Importance of quality and short delays of arrival of the data
Very good impact on our high resolution Limited area models (ALADIN and AROME)
Very good job done by E-GVAP team. To reinforce operational robustness, act perhaps towards :
– Either a centralized BUFR encoder, with operational status– Or distributed BUFR encoders

EGVAP 3rd User MeetingE-GVAP workshop
6-7 May 2008, GFZ PotsdamCopenhagen, 6 nov. 2008
33
Nz dz dz
ne utral part o f the atm osphe re
wate r vapour s pe c ific part
The zenital delays : ZTD, ZHD, ZWD
fonction de projection
ZTD
ajustement d’un délaireprésentatif au zénith
v
’

E-GVAP workshop Copenhagen, 6 nov. 2008
34
Impact sur la prévision AROME
Précipitations cumuléesentre 03UTC et 15UTC,19 juillet 2008
sans assimilation de données de ZTD
AROME, initialisé à partir de l’analyse 00UTC, 19 juillet 2008
avec assimilation de données de ZTD
Observations
Equitable Threat Score
Plu
s pr
oche
des
obs
erva
tions
E-GVAP workshop Copenhagen, 6 nov. 2008
35
Operational aspects: experience feed-back (1/2)
List of events: (problems that we reported to EGVAP)
– Sept 2006: data from stations processed by analysis center MIS (missing) instead of KNMI
– Jan 2007: no data following faulty UPS replacement for BUFR encoder server
– Mar 2007: data with missing lat/lon from KNMI Operational model crash
– Apr 2007: data flowing from an un-announced center, NGAA– Apr 2007: no data because of a frozen job on BUFR encoder server– Feb 2008: no data except for METO because of an OS upgrade on
BUFR encoder server– Mar 2008: no data from METO, no data from GFZ, large errors with
SGN solutions -- 3 non-related problems

E-GVAP workshop Copenhagen, 6 nov. 2008
36
Operational aspects: experience feed-back (2/2)
Conclusions– Only one crash because of missing lat/lon coordinates: failure of our database QC
which should have caught that problem– Most, if not all, events were resolved the same day the problems were reported, or
sometimes had already been resolved by the time we reported them– Overall: quick turnaround for problem solving
Elements for discussion:– Most visible point of failure from my POV: single point-of-entry for GTS data:
• One BUFR encoder, apparently not doubled– Suggested way forward: each NMS implement and run the BUFR encoder courtesy of
the MetOffice (part of GRAS-SAF ROPP?)• Advantage: Reduces to near-zero the possibility that all BUFR encoders fail simultaneously• Disadvantage: Risk of implementing several encoders: increase likelihood of bad practices
and faulty data flowing on the GTS
– Ideally: as a user, I would prefer to continue with one single point of contact for all data … rather than several …

E-GVAP workshop Copenhagen, 6 nov. 2008
37
GPS ZTD Pre-processing
Pre-processing input:
GPS ZTD dataSelection list (white list)
Pre-processing steps:
6. Selection of the observations coming from stations in the mapCheck all values within physical rangeVerify that latitude, longitude, altitude, time significance have not changed (*)
7. Time thinning:In 4DVAR : average observations by time-slot (30 minutes or 1 hour)In 3DVAR : retain only the ‘most central’ obs (closest to analysis time)
8. Observation minus background bias correction
9. Observation standard deviation error assignment

E-GVAP workshop Copenhagen, 6 nov. 2008
38
Example of data usage (ARPEGE)
ARPEGE at 00H
(6h period, very short cut-off)

E-GVAP workshop Copenhagen, 6 nov. 2008
39
A typical distribution of GPS data in AROME

E-GVAP workshop Copenhagen, 6 nov. 2008
40