-
8/3/2019 Vector (Butterfly ) Diagrams for Osteoarthritic Gait a
Preliminary Report_Khodadadeh
1/5
Journal of Medical Engineering & Technology,Volume 12 ,
Number 1 (January/February 19881,pages 15-19
Vector (butterfly) diagrams for 0 s eoarthri ticgait: a
preliminary reportSoussan KhodadadehOrthotic Research C5 Locomotor
Assessment Unit , Robert Jones & Agnes HuntOrthopaedic Hospital
, Oswcshy, Shropshire SYlO 7AG, OKTh is pape r describes brieJy a
simple three-dimensional vectordiagram displ ay combining a ll the
forc e components o gait in onediagram. The locus o f the centre o
pressure of thefeet on hegroundis J;lb illustrated. Th is provides
a us eful reference for theconsideration of th e position of th e
centre o body mass over one oo tor the other. In the case of some
pathological ga its, the lateraldisplacement can be substantial.
The traditional two-dimensionaldiagram fa ils to show some of thes
e effects.
IntroductionThe traditional form of displaying gait
measurementsincludes the plotting, on a time basis, of the
vertical,horizontal and lateral components of the force betweenthe
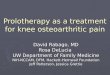
feet and the ground.An alternative form of visual display of force
platereadings is the well-known display due to Pedotti [ l] inwhich
the vertical (2 ) and horizontal (Y) orce com-ponents are combined
into a resultant polar vector (R) tan angle (0 ) o the vertical
acting at the centre ofthrust onthe foot. As the locus of the
centre ofpres sure moves alongthe ground so radial vectors emanate,
producing thecharacteristic fan-shaped diagrams shown in figure
1.In some cases the vertical-horizontal vector combinationalone
fully indicates the condition of the pathological gait ,so these
diagrams are adequate. However, Khodadadeh[2] has shown that in
many instances ofosteoarthritic gaitthe lateral ( X ) component of
the gait force is mostsignificant, and in a few cases all three
components aresignificant. It is therefore essential at least in an
initialinvestigation of pathological gait that all relevant
forcecomponents are measured and displayed. This will beprovided by
a three -dimensional display. W e believe amore comprehensive
assessment can be obtained with athree dimensional representation
of the data.
This is a brief preliminary report on a relatively simplemethod
of displaying all three force components, and onits value.
Three-dimensionaldiagramsIsometric drawings (Abbo tt [3]) are
used to display thethree-dimensional dat a so that measurements or
estima-tions of the length of the resultant force vector may
bemade.The force components arc measured by means of Kistlerforce
plates; the co-ordinates of the centr e of pressure in
-0.0 0.Right
o .6 Lef t 1 . 2 m
Post-op. r e su l t sPatient no. B 2
6 mFigure I . Vector (butterJy) diagrams , f i r osteoarthritic
gait .the plate(s) are calculated from the forces and momentsby the
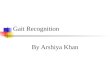
method described by Khodadadeh [4].In the case of single (on e leg)
suppo rt, if the co-ordinatesof the centre of pressure a re (Xo,
Yo, 0) and the tota l forceis ( X I , 1 ,Z I )kN(figure 2 [ a ] ) ,
he resul tant force vectorisrepresented in the butterfly diagram by
a straight-linejoining points (Xo , Yo,0) and (X, XI, o + YI , 2 ,
) .In the double support case there are force vectors fromboth
feet, F R [= ( X R , YR , ZR)] rom the right leg and Fl,[= ( X L ,
Y,-, Z L ) ] rom the left leg. The resultant forcevector I = ( XR+
X L , Y R+ YL,ZR + Z,) acts at an angledefined by the a ppro pria
te direction cosines (figure 2[b]).Hence to plot t he resu ltant
vector all that is needed is thepoint of application, at plate
level, of the resultant. Theresul tant vector will pass through the
point of intersectionof the forces FR an d F L. The resultant
centre of pressurefor the double support case is determined by
projectingthe force I through this common point to the
intersectionwith the horizontal plane at plate level.Patients
studiedTh e technique has been used to assess 42 patients, withan
average age of 65 years ( 2 7 female and 15 male) beforeand
approximately six months after a Charnley total hipreplacement
operation. When the patient was walkingwithout hesitation the
Kistler plate recording was star-ted. Three specimen walks were
recorded. All patientscould walk independently without walking
aids.
-
8/3/2019 Vector (Butterfly ) Diagrams for Osteoarthritic Gait a
Preliminary Report_Khodadadeh
2/5
S. Khodadadeh Vr c to r (huttrrfl!) diag rams for osteoarthrit
ic gait
2
P r o j e c t i o n o ff o r c e o n t oc o o r d i n a t e s( X
, Y , 2 )
F o r c e vec to r
R esu lForce
\\\I n t e r s e c t i o n o f/ i n g l e f or ces
t a n t\ \
-
8/3/2019 Vector (Butterfly ) Diagrams for Osteoarthritic Gait a
Preliminary Report_Khodadadeh
3/5
S . Khodadadeh \ cctor (bu t ter f ly ) d iaqram s fix- ostcoar
thr i t ic gai t
1 4 -
1 2 -
1 0 -
0 . 8 -0 6 -
0 L -
0 2 -
kN
IIlil
--7/
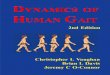
Figure 3. Three-dimensional vector (bu tl erj y) d iag rams for
osteoarthritic gail (wi lh unilaleral hi p disease). Direction
oJwalking right tol e f i . Full lines = single support; dotled
lines = double support.
kN1. 41 . 2 f
I
k N1 .L -1. 2 -1. 0 -0.8
0 . 6 -0 4 -0.2 - .rk I 7/
-.-JPatient no. A 2Pre-op walk 2Figure 4. Three-dimensional
cector (butterJy) dia gram sfor osteoarthritic gait ( x) it
hunilateral hip disease). Direction ofirtalking ri
-
8/3/2019 Vector (Butterfly ) Diagrams for Osteoarthritic Gait a
Preliminary Report_Khodadadeh
4/5
1 . 2 4 I / I
kN o .81.6 IJ
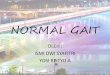
- . -. Patient no. B 3.-.> Post-op walk 1- - - - _ _
_->
7-.
Figuw 5. %r-ee-dinirnriorial m l o r (butlerJv) dia\qrcinis f o
r osleoarlhrilic g ai t fu7irh bihteral h ip di.rease). Direction
(jzr,alking r igh l loIefi. Ful l l i n r r = ting le support:
dotted lines = doub le .support.
kN
1 . 2 & 1k N L 7
-.-
l o
0. 8
0 6
0.i
0.2
Patient no. C 1
7-.
-
8/3/2019 Vector (Butterfly ) Diagrams for Osteoarthritic Gait a
Preliminary Report_Khodadadeh
5/5
S . Khodadadeh \.ci.tor ( Ix i t t c r t l y )d ia g ra m s for
ostcoarthritic gait
The patients were divided into three groups:Group A - Patients
with unilatrral hip disease (23Group 3 - Patients with bilatrral
hip disease ( 1 1
Group C - Patients with the first of two total hip
patients).
patients).
replacements (8 patients).A selection of these cases have been
chosen to illustratethe value of the techniques.
Results and discussionFigure 3 shows, for the pre-operative
condition of theright foot, motion of the centre of pressure which
is socomplex that i t would be totally obscured in theconventional
two-dimensional diagram. Th e centreadvances, retreats in the same
line, and finally proceedsin a different path to completion. For
the left foot, theprogression is smooth, but the shorter vector
length andoutline indicate the defective leg as clearly as in
thesimple two-dimensional butterfly d iagram . The post-operative
results show smoother movement of the centreof pressure, clearly
tracing the non-linear motion,together with an adequately-deve
loped butterfly outline.Both diag rams of figure 3 show two common
characteris-tics of the double support vectors. Firstly the
smoothtransition from the single supports (full line), to
doublesupport (do tted lines), despite the known unreliability
ofthe individual vectors near the heel-strike and toe-off.Secondly,
the combined centr e of pressure always movessteadily across from
right leg to left, whereas i t might beexpected, at least for
paticnts with a severe condition, thatthere would be a sha rp
sideways movement correspond-ing to the transfer of weight from one
leg to the other.In figure 4, two further points are exhibited.
Thedifference between the left leg and the diseased right
legpreoperatively is obvious but i t is noticeable that
thetransient vectors are well separated laterally from
thesteady-state principal group. This suggests strongly thatthey
arise from calculations based on insufficientlyaccurate Kistlcr
plate output, whereas the two-dimen-sional representation often
shows the transients as beingclose to heel-strike and toe-off,
which would indicate apossible genuine significance.
Pre-operatively , he doublesupport vectors are very widely spaced
near the right foottoe-off illustrating a lurch towards the healthy
leg. Thecorrection of this condition is shown by the much moreeven
spacing post-operatively.Figure 5 shows a very slow walk, with
tight bunching ofall vectors pre-operatively and an erratic trace
for the
centre of pressure. The post-operativc diagram shows aclear
improvement, with smooth curves for hoth centresof pressure. Hcre
it can be seen also that bunching in thehorizontal direction is
typically accompanied by somelateral displacement, so that therc
is, in fact, continuingmotion of the foot, even though inspection
of the plot ofhorizontal against vertical factors would indicate
stasis.Figure 6 illustrates an obvious factor, namely a walk
withone foot badly splayed out. Again, the horizontalprojection
would show slower motion than the actualspeed at the plate. The
right foot, pre-operatively, and theleft foot, post-operatively,
also show the typical bunchingof vectors near a lateral shift in
the motion of the centre ofpressure.
ConclusionsPolar vector butterfly diagrams provide a useful
visualmeans of representing gait force data which in conjunc-tion
with the temporal plottings of vertical, horizontaland lateral
force components enable assessment to bemade of the gait of
patients before and after hipreplacement operations. Although
butterfly diagrams intwo-dimensional form are well known, we
belicve thethree-dimensional diagrams presented here are
moreadvantageous in that all force components are rcpresen-ted. In
particular, the movement of the centre ofpressureacross the plates
during double support gives a usefulreference for the considera
tion ofthe position of the centreof mass over one foot or the other
. Thi s aspect of gait isnot revealed by temporal plottings.
However, it is notpossible to es timate from some of the resultan t
vectors themagnitude of the lateral and horizontal force
com-ponents.
AcknowledgementsI would like to thank Mr J . D. Harris, Director
of theOxford Orthopaedic Engineering Centre, and theDepartment of
Health and Social Security and theOxford University Computing
Centre for providing thefacilities for this study.
References1. PEDOTTI, . (1977) Simple equipm ent used in
clinicalpractice for evaluation of locomotion. IEEE
Tran.mcfionson
Biomedical Engineering, BME-24, 5.2. K H O D A D A D E H ,.
(1987) Quantitative approach to osteo-arthritic gait assessment.
Engineering in ,bfedzcine, 16, 1.3. ABBOTT,LV. (1944) Machine
Drawing and Design. Part I(Blackie & Sons L t d, U K ) , p p.
24-48.4 . KHODADADEH,. (1981) The use of th e force plates inthe
clinical examination of locomotor disabilities (M.Sc.lhesis,
University of Oxford).
19