Embed Size (px)
Citation preview
CHAPTER 10
Vectors and the Geometry of Space
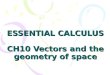
1. Vectors in the Plane
We denote the directed line segment from the point P (initial point) to the
point Q (terminal point) as�!PQ. The length of
�!PQ is its magnitude, denoted
k�!PQk.Definition. A vector is the equivalence class of all directed line segments
(or arrows) having the same magnitude and the same direction (an arrow andits parallel translates). Any arrow in the class may be used to name the vector.
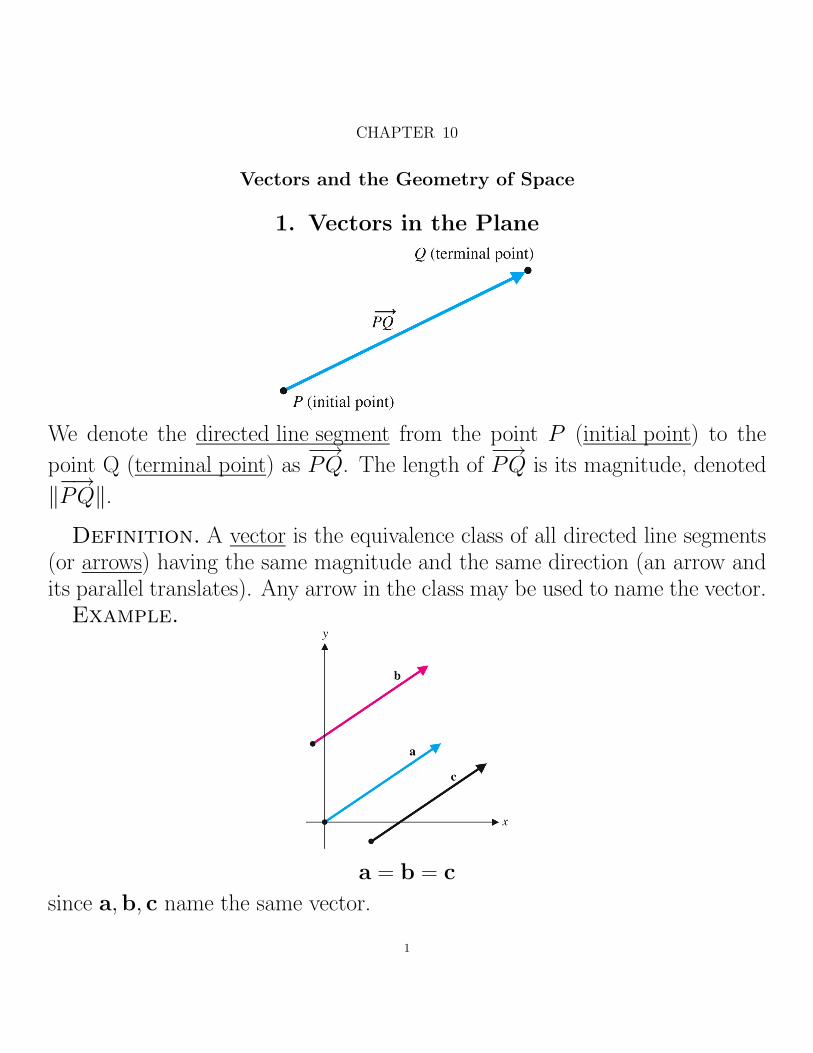
Example.
a = b = c
since a,b, c name the same vector.
1
2 10. VECTORS AND THE GEOMETRY OF SPACE
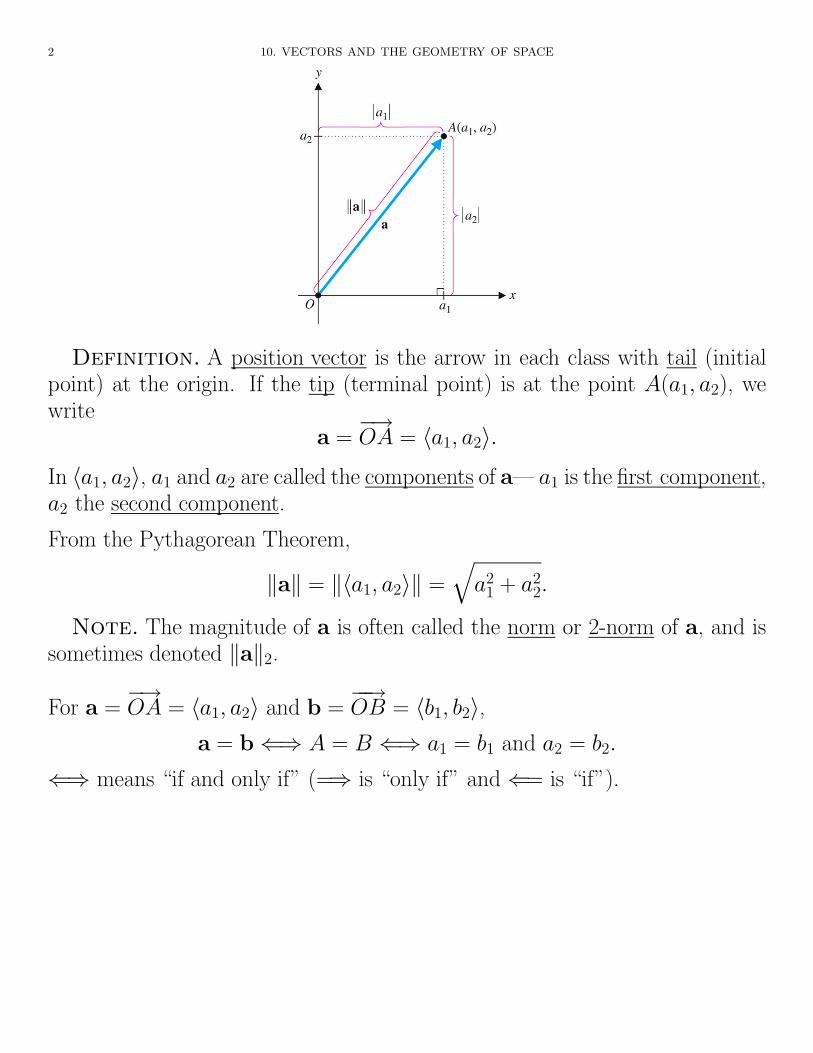
Definition. A position vector is the arrow in each class with tail (initialpoint) at the origin. If the tip (terminal point) is at the point A(a1, a2), wewrite
a =�!OA = ha1, a2i.
In ha1, a2i, a1 and a2 are called the components of a— a1 is the first component,a2 the second component.
From the Pythagorean Theorem,
kak = kha1, a2ik =q
a21 + a2
2.
Note. The magnitude of a is often called the norm or 2-norm of a, and issometimes denoted kak2.
For a =�!OA = ha1, a2i and b =
��!OB = hb1, b2i,
a = b() A = B () a1 = b1 and a2 = b2.
() means “if and only if” (=) is “only if” and (= is “if”).
1. VECTORS IN THE PLANE 3
Basic Operations
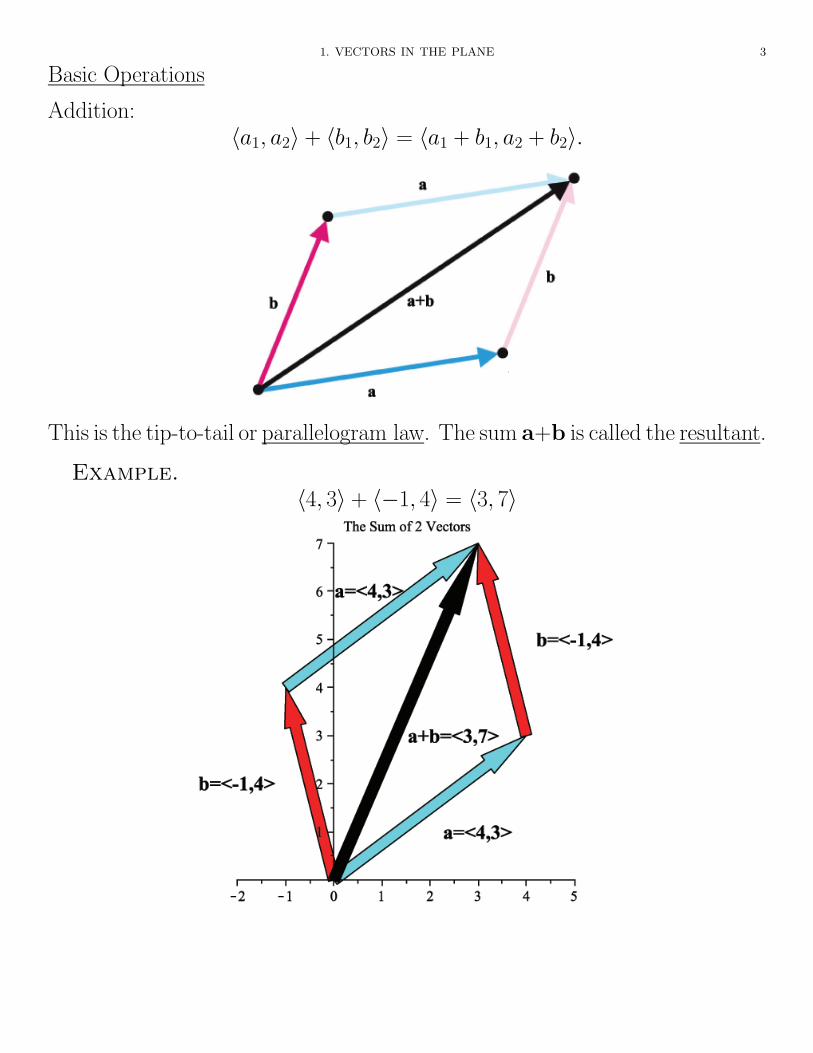
Addition:ha1, a2i + hb1, b2i = ha1 + b1, a2 + b2i.
This is the tip-to-tail or parallelogram law. The sum a+b is called the resultant.
Example.h4, 3i + h�1, 4i = h3, 7i
4 10. VECTORS AND THE GEOMETRY OF SPACE
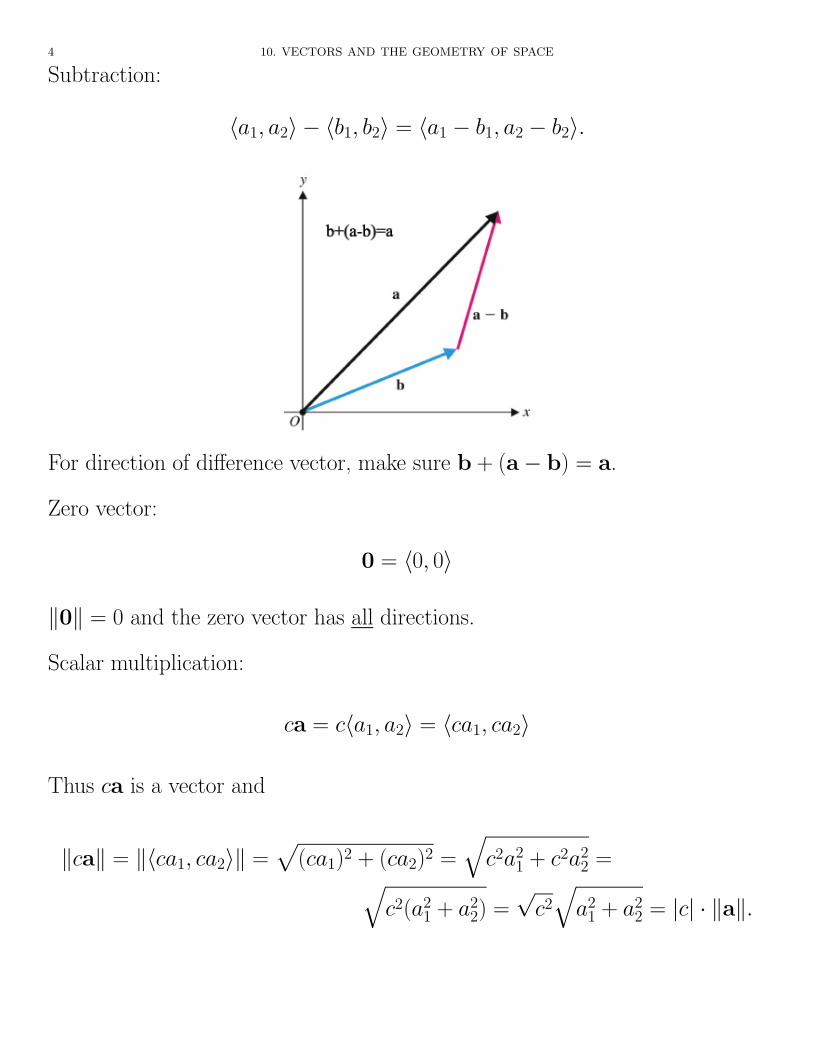
Subtraction:
ha1, a2i � hb1, b2i = ha1 � b1, a2 � b2i.
For direction of di↵erence vector, make sure b + (a� b) = a.
Zero vector:
0 = h0, 0i
k0k = 0 and the zero vector has all directions.
Scalar multiplication:
ca = cha1, a2i = hca1, ca2i
Thus ca is a vector and
kcak = khca1, ca2ik =p
(ca1)2 + (ca2)2 =q
c2a21 + c2a2
2 =qc2(a2
1 + a22) =
pc2
qa2
1 + a22 = |c| · kak.

1. VECTORS IN THE PLANE 5
Vectors are parallel if one is a scalar multiple of the other.
ca k a, in the same direction for c � 0, the opposite direction for c 0.
Additive inverse:
�a = �ha1, a2i = (�1)ha1, a2i = h�a1,�a2ik�ak = k(�1)ha1, a2ik = |�1| · kha1, a2ik = kak
Definition. V2 =�hx, yi|x, y 2 R
, the set of all two-dimensional posi-
tion vectors.
Definition. A vector space is a set of vectors with the same dimension anda set of scalars (real or complex numbers) with addition and scalar multiplica-tion such that for any vectors u,v, and w, and any scalars ↵ and �,
(1) v + w = w + v
(2) (u + v) + w = u + (v + w)
(3) ↵(�v) = (↵�)v
(4) (↵ + �)v = ↵v + �v
(5) ↵(v + w) = ↵v + ↵w
(6) 1v = v
(7) 0v = 0
(8) v + 0 = v
(9) For each v there is �v such that v + (�v) = 0

6 10. VECTORS AND THE GEOMETRY OF SPACE
Theorem (1.1). V2 is a vector space.
Proof. (of (2))
(u + v) + w = (hu1, u2i + hv1, v2i) + hw1, w2i =
hu1 + v1, u2 + v2i + hw1, w2i = h(u1 + v1) + w1, (u2 + v2) + w2i =
hu1 + (v1 + w1), u2 + (v2 + w2)i = hu1, u2i + hv1 + w1, v2 + w2i =
hu1, u2i + (hv1, v2i + hw1, w2i) = u + (v + w)
Note. For any two distinct points A(x1, y1) and B(x2, y2),�!AB corresponds
to the position vector hx2 � x1, y2 � y1i.
Any vector can be written in terms of the standard basis vectors
i = h1, 0i and j = h0, 1i.For any a 2 V2,
a = ha1, a2i = ha1, 0i + h0, a2i = a1h1, 0i + a2h0, 1i = a1i + a2j.
We call a1 and a2 the horizontal and vertical components of a
Note. kik = kjk = 1.
A unit vector is a vector a where kak = 1.
Theorem (1.2). For any nonzero vector a, a unit vector having thesame direction as a is
u =1
kaka.
Proof.
a 6= 0 =) kak > 0 =) u is a positive scalar multiple of a =)u has the same direction as a.
kuk =��� 1
kaka��� =
��� 1
kak
��� · kak =1
kak · kak = 1.
1. VECTORS IN THE PLANE 7
Example. Find a unit vector in the same directioin as a = h6, 8i.kak = kh6, 8ik =
p36 + 64 =
p100 = 10.
Therefore
u =1
10h6, 8i = h3
5,4
5i.
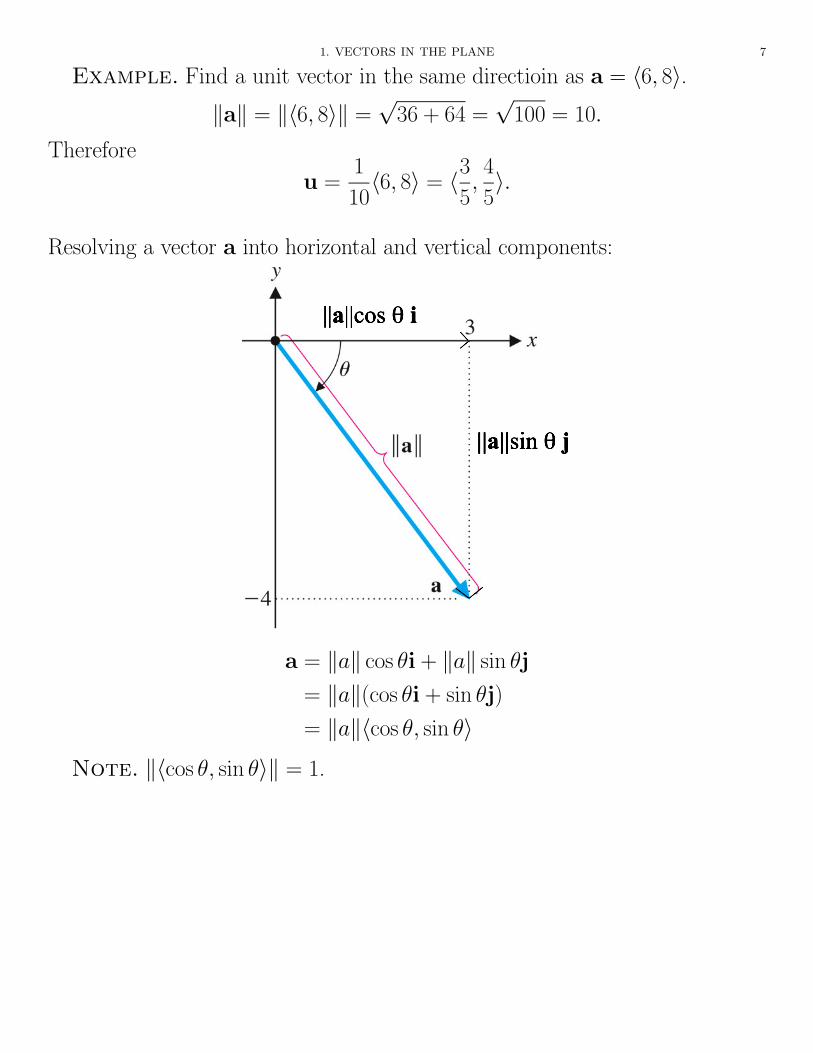
Resolving a vector a into horizontal and vertical components:
a = kak cos ✓i + kak sin ✓j
= kak(cos ✓i + sin ✓j)
= kakhcos ✓, sin ✓iNote. khcos ✓, sin ✓ik = 1.
8 10. VECTORS AND THE GEOMETRY OF SPACE
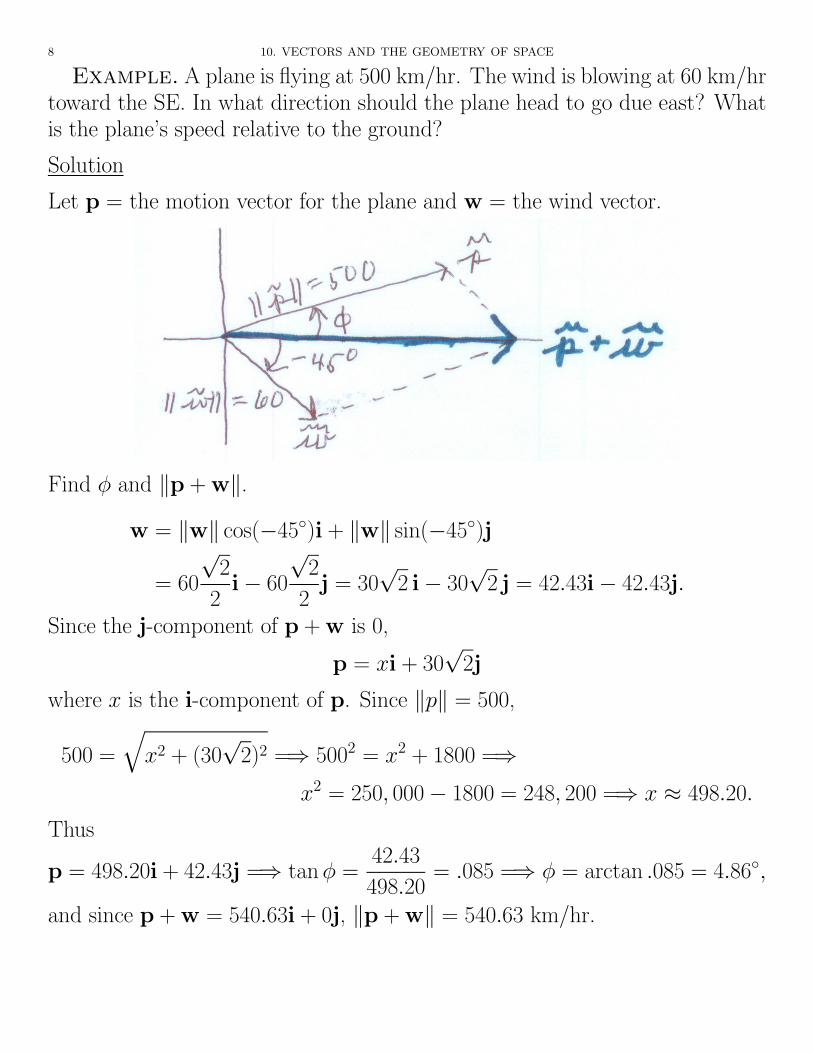
Example. A plane is flying at 500 km/hr. The wind is blowing at 60 km/hrtoward the SE. In what direction should the plane head to go due east? Whatis the plane’s speed relative to the ground?
Solution
Let p = the motion vector for the plane and w = the wind vector.
Find � and kp + wk.
w = kwk cos(�45�)i + kwk sin(�45�)j
= 60
p2
2i� 60
p2
2j = 30
p2 i� 30
p2 j = 42.43i� 42.43j.
Since the j-component of p + w is 0,
p = xi + 30p
2j
where x is the i-component of p. Since kpk = 500,
500 =q
x2 + (30p
2)2 =) 5002 = x2 + 1800 =)x2 = 250, 000� 1800 = 248, 200 =) x ⇡ 498.20.
Thus
p = 498.20i + 42.43j =) tan � =42.43
498.20= .085 =) � = arctan .085 = 4.86�,
and since p + w = 540.63i + 0j, kp + wk = 540.63 km/hr.

2. VECTORS IN SPACE 9
Maple. See vectorsinplane(10.1).mw or vectorsinplane(10.1).pdf
2. Vectors in Space
We use a right-handed coordinate system.
The coordinate system has 8 octants. The first octant has x > 0, y > 0, z > 0.
Distance Formula
d�(x1, y1, z1), (x2, y2, z2)} =
p(x2 � x1)2 + (y2 � y1)2 + (z2 � z1)2 .
Vectors in R3
These are similar to vectors in R2, with one more dimension.
V3 =�hx, y, zi|x, y, z 2 R
is a vector space with
a + b = ha1, a2, a3i + hb1, b2, b3i = ha1 + b1, a2 + b2, a3 + b3i,ca = cha1, a2, a3i = hca1, ca2, ca3i, and
a� b = ha1, a2, a3i � hb1, b2, b3i = ha1 � b1, a2 � b2, a3 � b3i,
10 10. VECTORS AND THE GEOMETRY OF SPACE
Also,
kak = kha1, a2, a3ik =q
a21 + a2
2 + a23,
sokcak = |c|kak, 0 = h0, 0, 0i, and
�a = h�a1,�a2,�a3iNote. The vector with initial point P (a1, a2, a3) and terminal point
Q(b1, b2, b3) corresponds to the position vector�!PQ = hb1 � a1, b2 � a2, b3 � a3i.
The standard basis consists of
i = h1, 0, 0, i, j = h0, 1, 0i, k = h0, 0, 1i with
kik = kjk = kkk = 1.
For any vector a = ha1, a2, a3i,a = a1i + a2j + a3k.
Also, for any vector a = ha1, a2, a3i 6= 0, a unit vector u in the same directionas a is
u =1
kaka.
The sphere of radius r centered at (a, b, c) consists of all points (x, y, z) suchthat
d�(x, y, z), (a, b, c)} =
p(x� a)2 + (y � b)2 + (z � c)2
or(x� a)2 + (y � b)2 + (z � c)2 = r2,
the standard form of the equation of a sphere.

2. VECTORS IN SPACE 11
Problem (Page 711 #28). Identify the geometric shape given by
x2 + x + y2 � y + z2 =7
2.
Solution
Rewrite as
(x2 + x ) + (y2 � y ) + z2 =7
2.
Complete squares:⇣x2 + x +
1
4
⌘+⇣y2 � y +
1
4
⌘+ z2 =
7
2+
1
4+
1
4=)
⇣x +
1
2
⌘2+⇣y � 1
2
⌘2+ z2 = 4
Thus we have the sphere of radius 2 centered at⇣� 1
2,12, 0⌘.
Problem (Page 711 #20). Find a vector of magnitude 3 in the same di-rection as v = 3i + 3j� k.
Solution
kvk =p
32 + 32 + (�1)2 =p
19
Thus
u =1p19
v
is a unit vector in the same direction of v, so
3u =3p19
v =9p19
i +9p19
j� 3p19
k
has magnitude 3 in the same direction as v.
Problem (Page 711 #40). An equation for the x-axis is
y2 + z2 = 0 or y = z = 0.

12 10. VECTORS AND THE GEOMETRY OF SPACE
Problem (Page 712 #62). Three ropes are attached to a 300-pound crate.Rope A exerts a force of h10,�130, 200i pounds on the crate, and rope B exertsa force of h�20, 180, 160i pounds on the crate. What force must rope C exerton the crate to move it up and to the right with a constant force of h0, 30, 20ipounds.
Solution
Force of rope A is a = h10,�130, 200i, rope B is b = h�20, 180, 160i, rope Cis c = hc1, c2, c3i, and the weight is w = h0, 0,�300i.We want the net force
a + b + c + w = h0, 30, 20i =)h�10 + c1, 50 + c2, 60 + c3i = h0, 30, 20i =)
c1 = 10, c2 = �20, c3 = �40 =)c = h10,�20,�40i =) kck ⇡ 45.8.
Thus rope C exerts a force of about 45.8 pounds in the direction h1,�2 � 4i.Maple. See vectorsinspace(10.2).mw or vectorsinspace(10.2).pdf
3. The Dot Product
This is also often referred to as the scalar product.
In V2:a · b = ha1, a2i · hb1, b2i = a1b1 + a2b2
In V3:a · b = ha1, a2, a3i · hb1, b2, b3i = a1b1 + a2b2 + a3b3
Example. If a = h�3, 2, 5i and b = h3, 5,�6i,a ·b = h�3, 2, 5i · h3, 5,�6i = (�3)(3) + 2(5) + 5(�6) = �9 + 10� 30 = �29

3. THE DOT PRODUCT 13
Note.
(1) The dot product of two vectors is a number.
(2) A vector ha, bi in V2 can be thought of a vector ha, b, 0i in V3, so results weprove for V3 also hold for V2.
Theorem (3.1). For vectors a,b, c and any scalar d,
(1) a · b = b · a(2) a · (b + c) = a · b + a · c(3) (da) · b = d(a · b) = a · (db)
(4) 0 · a = 0
(5) a · a = kak2
Proof.
(2) a · (b + c) = ha1, a2, a3i ·�hb1, b2, b3i + hc1, c2, c3i
�= ha1, a2, a3i · hb1 + c1, b2 + c2, b3 + c3i= a1(b1 + c1) + a2(b2 + c2) + a3(b3 + c3)
= a1b1 + a1c1 + a2b2 + a2c2 + a3b3 + a3c3
= a1b1 + a2b2 + a3b3 + a1c1 + a2c2 + a3c3
= ha1, a2, a3i · hb1, b2, b3i + ha1, a2, a3i · hc1, c2, c3i= a · b + a · c.
(5) a · a = ha1, a2, a3i · ha1, a2, a3i = a21 + a2
2 + a23 = kha1, a2, a3ik2 = kak2.
Note. a · b = 0 does not imply a = 0 or b = 0, so this di↵ers from ourusual multiplication.
14 10. VECTORS AND THE GEOMETRY OF SPACE
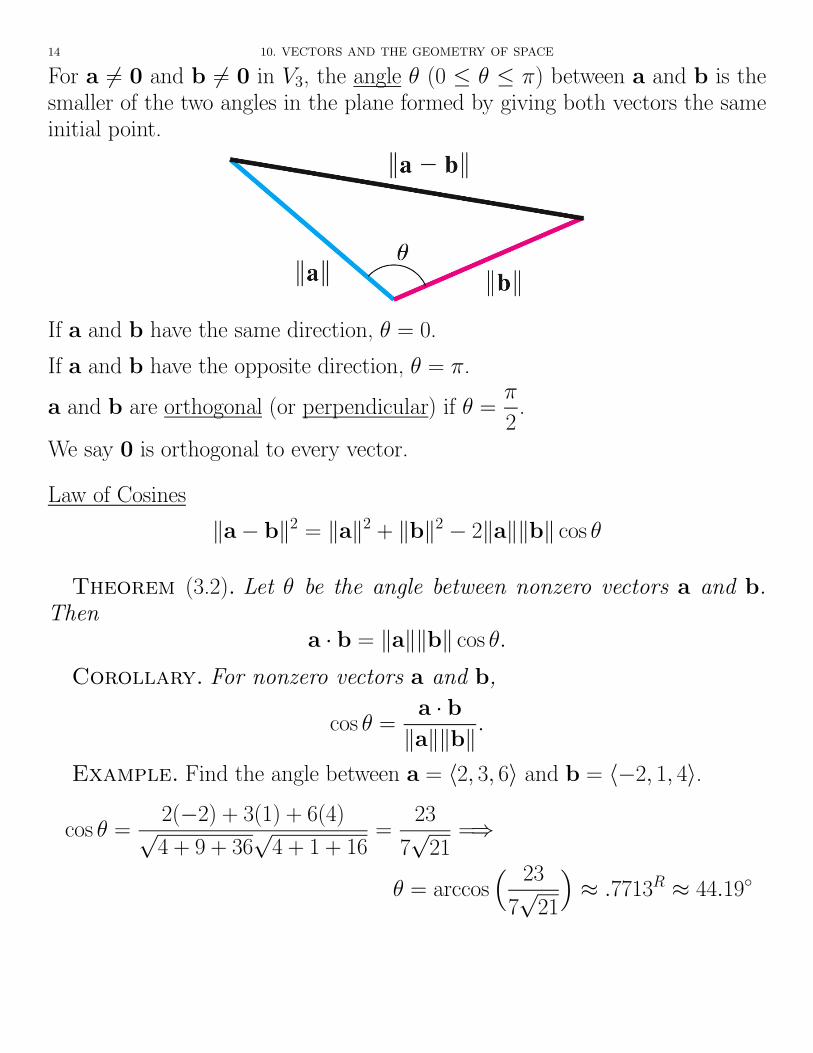
For a 6= 0 and b 6= 0 in V3, the angle ✓ (0 ✓ ⇡) between a and b is thesmaller of the two angles in the plane formed by giving both vectors the sameinitial point.
If a and b have the same direction, ✓ = 0.
If a and b have the opposite direction, ✓ = ⇡.
a and b are orthogonal (or perpendicular) if ✓ =⇡
2.
We say 0 is orthogonal to every vector.
Law of Cosines
ka� bk2 = kak2 + kbk2 � 2kakkbk cos ✓
Theorem (3.2). Let ✓ be the angle between nonzero vectors a and b.Then
a · b = kakkbk cos ✓.
Corollary. For nonzero vectors a and b,
cos ✓ =a · bkakkbk.
Example. Find the angle between a = h2, 3, 6i and b = h�2, 1, 4i.
cos ✓ =2(�2) + 3(1) + 6(4)p4 + 9 + 36
p4 + 1 + 16
=23
7p
21=)
✓ = arccos⇣ 23
7p
21
⌘⇡ .7713R ⇡ 44.19�
3. THE DOT PRODUCT 15
Corollary. a and b are orthogonal (a ? b) () a · b = 0.
Theorem (3.3 — Cauchy-Schwarz Inequality). For any vectors a and b,
|a · b| kakkbkor
|a1b1 + a2b2 + a3b3| q
a21 + a2
2 + a23
qb21 + b2
2 + b23.
Proof.
|a · b| =��kakkbk cos ✓
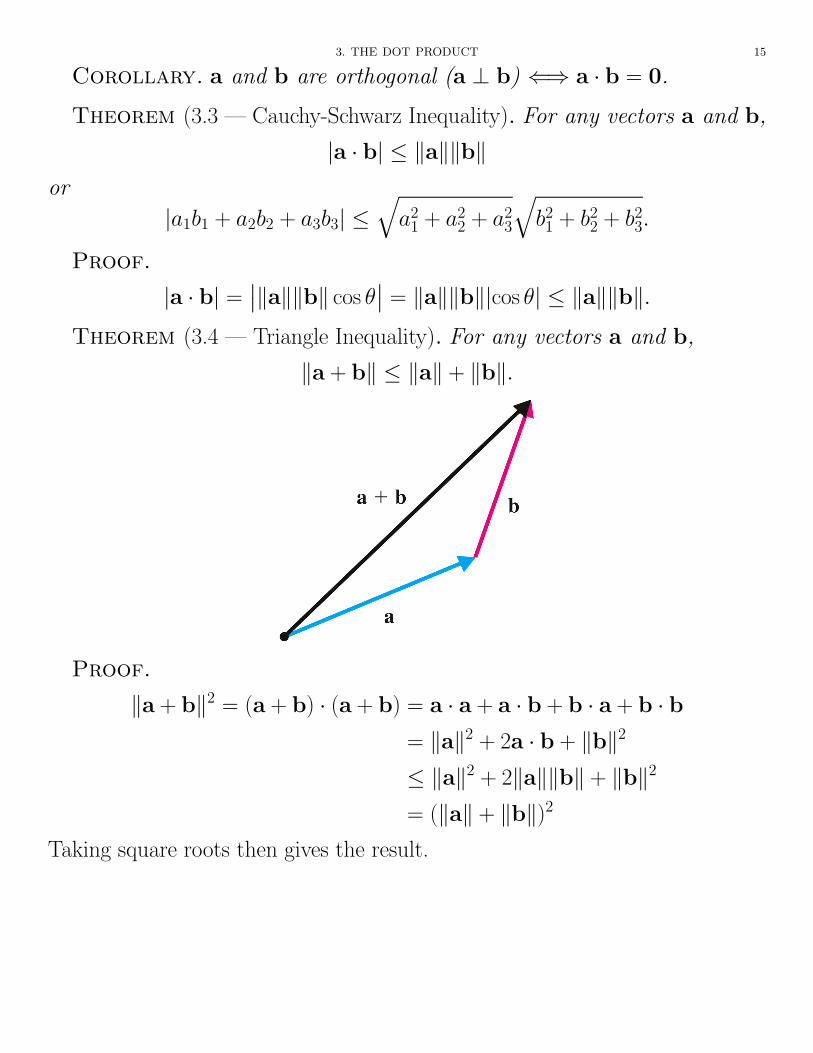
�� = kakkbk|cos ✓| kakkbk.Theorem (3.4 — Triangle Inequality). For any vectors a and b,
ka + bk kak + kbk.
Proof.
ka + bk2 = (a + b) · (a + b) = a · a + a · b + b · a + b · b= kak2 + 2a · b + kbk2
kak2 + 2kakkbk + kbk2
= (kak + kbk)2
Taking square roots then gives the result.
16 10. VECTORS AND THE GEOMETRY OF SPACE
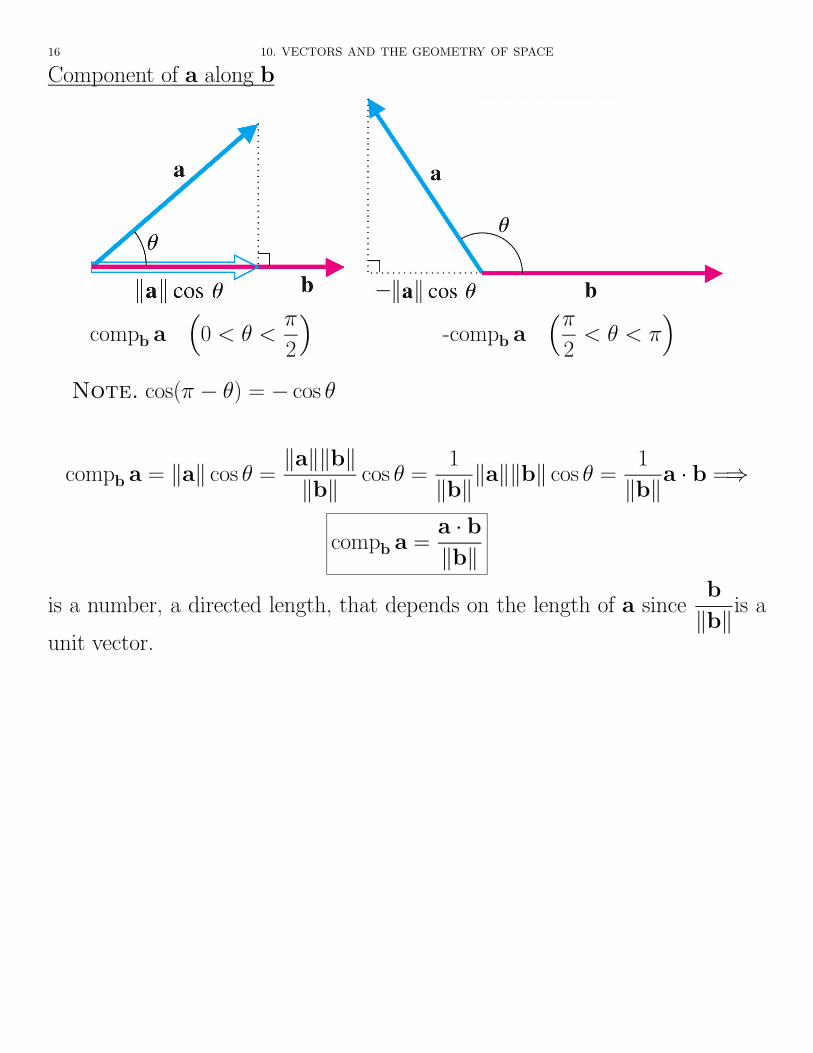
Component of a along b
compb a⇣0 < ✓ <
⇡
2
⌘-compb a
⇣⇡
2< ✓ < ⇡
⌘
Note. cos(⇡ � ✓) = � cos ✓
compb a = kak cos ✓ =kakkbkkbk cos ✓ =
1
kbkkakkbk cos ✓ =1
kbka · b =)
compb a =a · bkbk
is a number, a directed length, that depends on the length of a sinceb
kbkis a
unit vector.
3. THE DOT PRODUCT 17
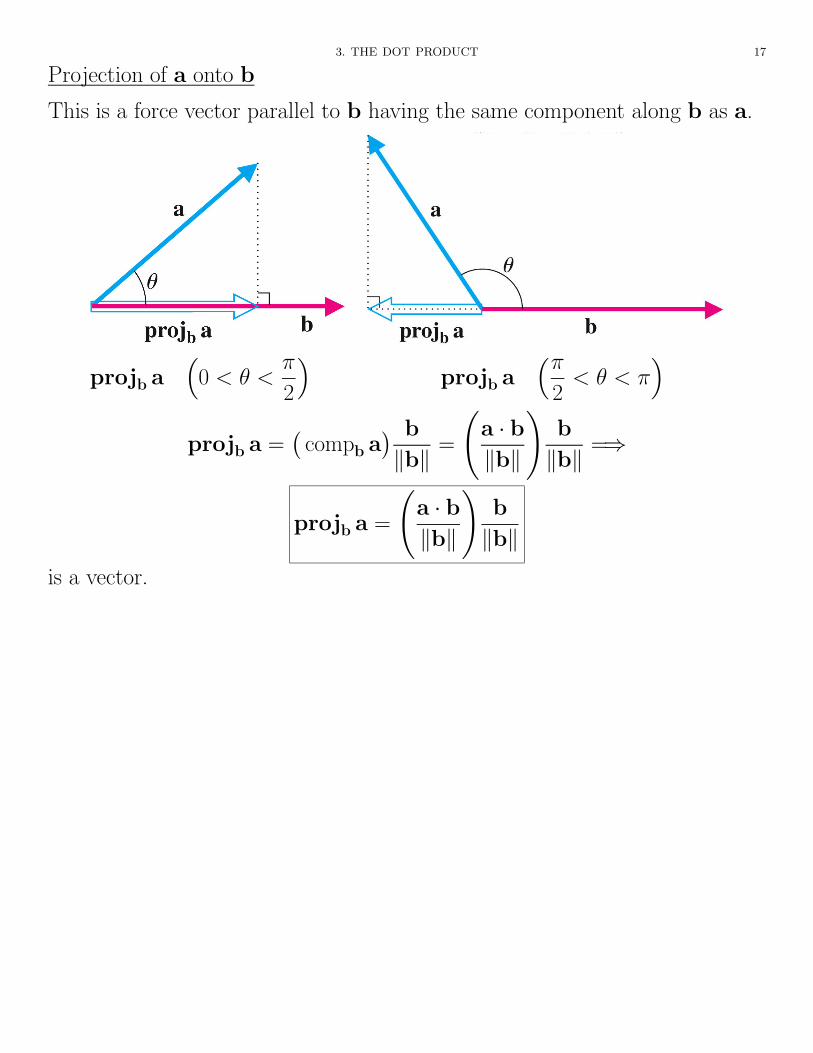
Projection of a onto b
This is a force vector parallel to b having the same component along b as a.
projb a⇣0 < ✓ <
⇡
2
⌘projb a
⇣⇡
2< ✓ < ⇡
⌘
projb a =�
compb a� b
kbk =
a · bkbk
!b
kbk =)
projb a =
a · bkbk
!b
kbkis a vector.
18 10. VECTORS AND THE GEOMETRY OF SPACE
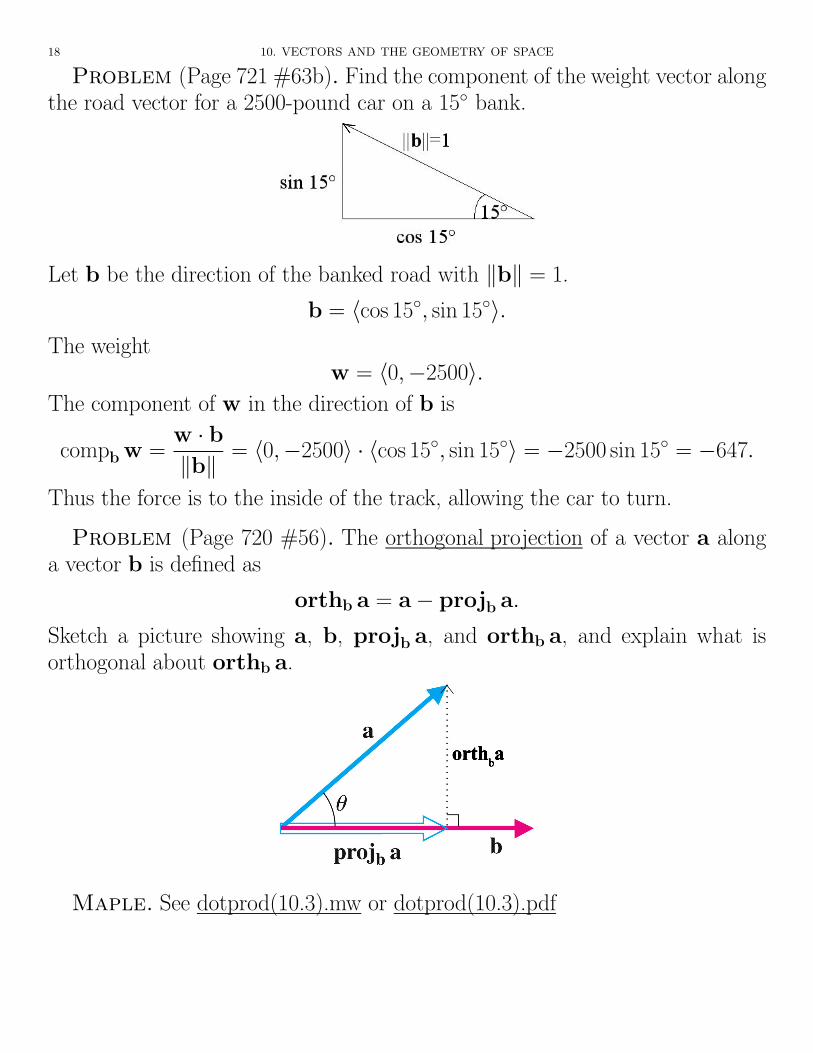
Problem (Page 721 #63b). Find the component of the weight vector alongthe road vector for a 2500-pound car on a 15� bank.
Let b be the direction of the banked road with kbk = 1.
b = hcos 15�, sin 15�i.The weight
w = h0,�2500i.The component of w in the direction of b is
compb w =w · bkbk = h0,�2500i · hcos 15�, sin 15�i = �2500 sin 15� = �647.
Thus the force is to the inside of the track, allowing the car to turn.
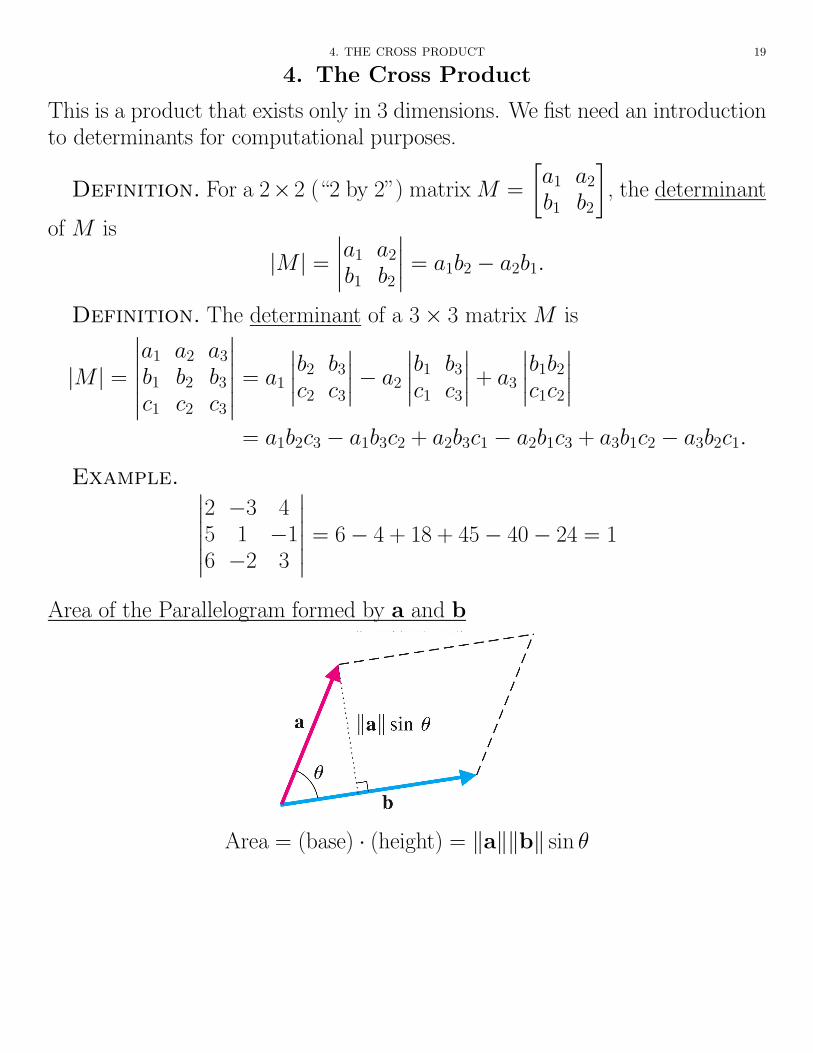
Problem (Page 720 #56). The orthogonal projection of a vector a alonga vector b is defined as
orthb a = a� projb a.
Sketch a picture showing a, b, projb a, and orthb a, and explain what isorthogonal about orthb a.
Maple. See dotprod(10.3).mw or dotprod(10.3).pdf
4. THE CROSS PRODUCT 19
4. The Cross Product
This is a product that exists only in 3 dimensions. We fist need an introductionto determinants for computational purposes.
Definition. For a 2⇥ 2 (“2 by 2”) matrix M =
a1 a2
b1 b2
�, the determinant
of M is
|M | =
����a1 a2
b1 b2
���� = a1b2 � a2b1.
Definition. The determinant of a 3⇥ 3 matrix M is
|M | =
������a1 a2 a3
b1 b2 b3
c1 c2 c3
������ = a1
����b2 b3
c2 c3
����� a2
����b1 b3
c1 c3
���� + a3
����b1b2
c1c2
����= a1b2c3 � a1b3c2 + a2b3c1 � a2b1c3 + a3b1c2 � a3b2c1.
Example. ������2 �3 45 1 �16 �2 3
������ = 6� 4 + 18 + 45� 40� 24 = 1
Area of the Parallelogram formed by a and b
Area = (base) · (height) = kakkbk sin ✓
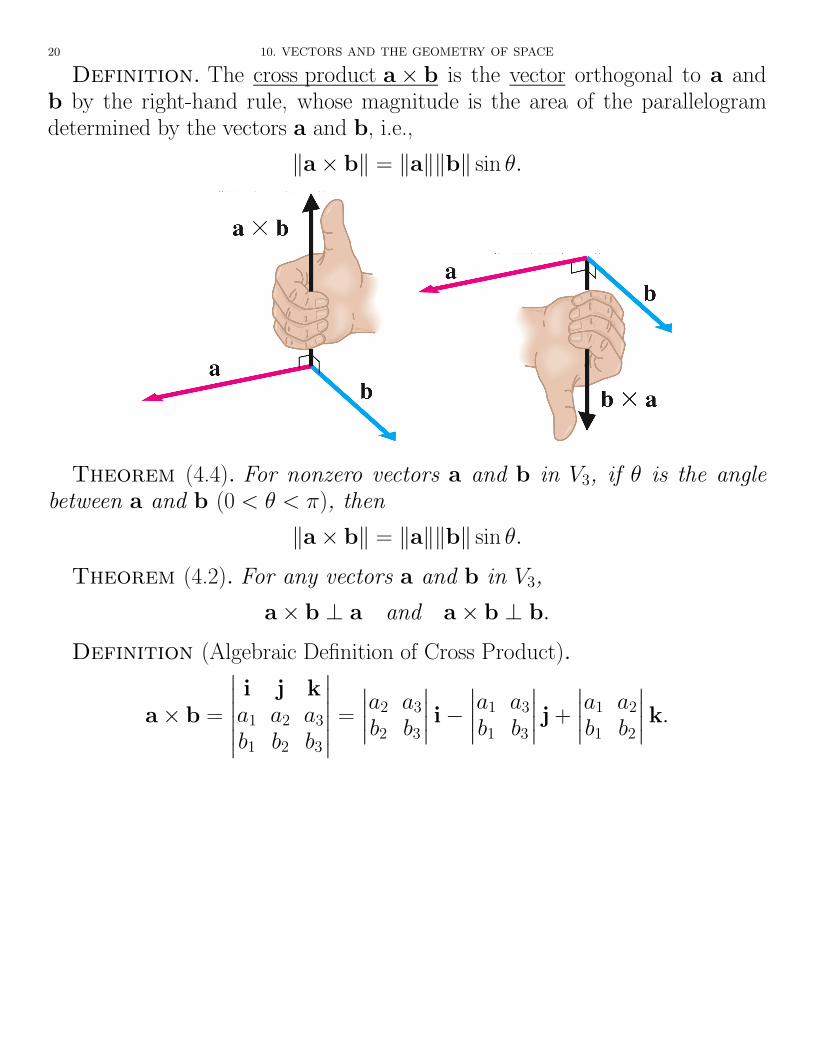
20 10. VECTORS AND THE GEOMETRY OF SPACE
Definition. The cross product a⇥ b is the vector orthogonal to a andb by the right-hand rule, whose magnitude is the area of the parallelogramdetermined by the vectors a and b, i.e.,
ka⇥ bk = kakkbk sin ✓.
Theorem (4.4). For nonzero vectors a and b in V3, if ✓ is the anglebetween a and b (0 < ✓ < ⇡), then
ka⇥ bk = kakkbk sin ✓.
Theorem (4.2). For any vectors a and b in V3,
a⇥ b ? a and a⇥ b ? b.
Definition (Algebraic Definition of Cross Product).
a⇥ b =
������i j ka1 a2 a3
b1 b2 b3
������ =
����a2 a3
b2 b3
���� i�����a1 a3
b1 b3
���� j +
����a1 a2
b1 b2
����k.
4. THE CROSS PRODUCT 21
Example.
h5, 1,�2i ⇥ h�1, 3, 4i =
������i j k5 1 �2�1 3 4
������ =
(4 + 6)i + (2� 20)j + (15 + 1)k = h10,�18, 16ikh10,�18, 16ik =
p100 + 324 + 256 =
p680 = 2
p170 ⇡ 26.08.
Theorem (4.1). For any vector a in V3,
a⇥ a = 0 and a⇥ 0 = 0.
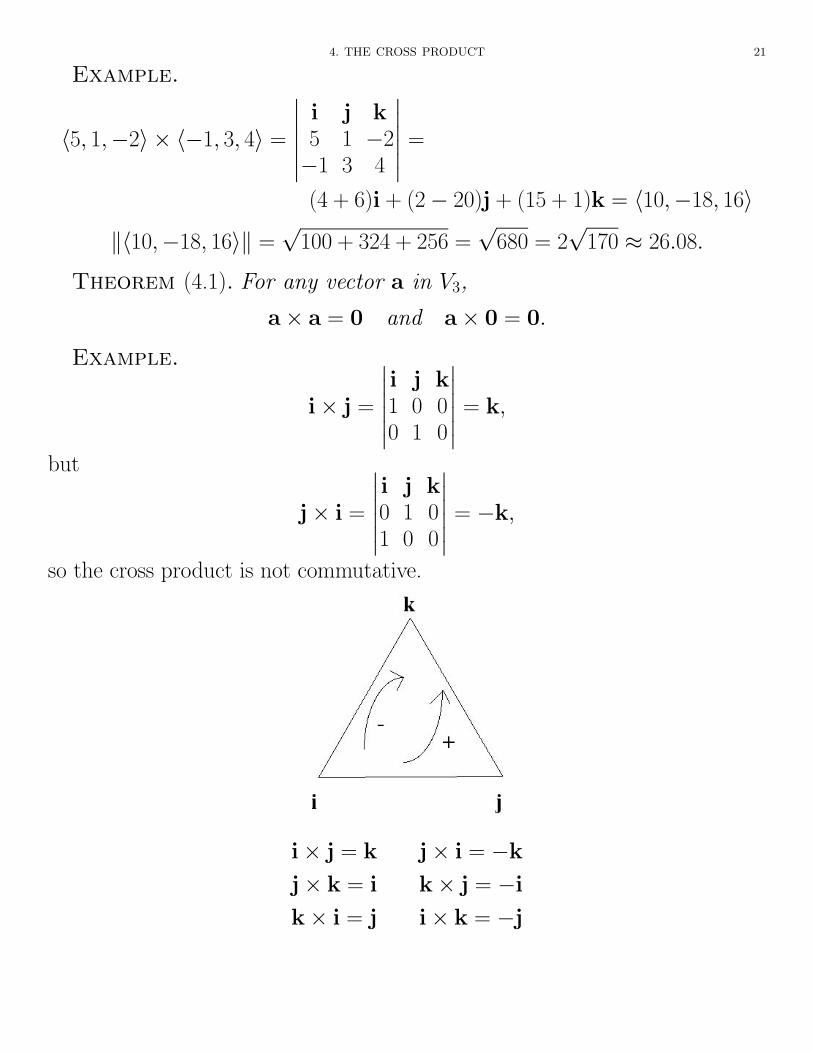
Example.
i⇥ j =
������i j k1 0 00 1 0
������ = k,
but
j⇥ i =
������i j k0 1 01 0 0
������ = �k,
so the cross product is not commutative.
i⇥ j = k j⇥ i = �k
j⇥ k = i k⇥ j = �i
k⇥ i = j i⇥ k = �j
22 10. VECTORS AND THE GEOMETRY OF SPACE
Theorem (4.3). For any a,b, c 2 V3, and any scalar d,
(1) a⇥ b = �(b⇥ a) (anti-commutativity)
(2) (da)⇥ b = d(a⇥ b) = a⇥ (db)
(3) a⇥ (b + c) = a⇥ b + a⇥ c
(4) (a + b)⇥ c = a⇥ c + b⇥ c
(5) a · (b⇥ c) = (a⇥ b) · c (scalar triple product)
(6) a⇥ (b⇥ c) = (a · c)b� (a · b)c (vector triple product)
Corollary (to Theorem 4.4). Two nonzero vectors a and b in V3 areparallel if and only if a⇥ b = 0.
Proof.
a k b() ✓(\ between a and b) = 0 or ✓ = ⇡ () sin ✓ = 0 ()ka⇥ bk = kakkbk sin ✓ = 0 () a⇥ b = 0.
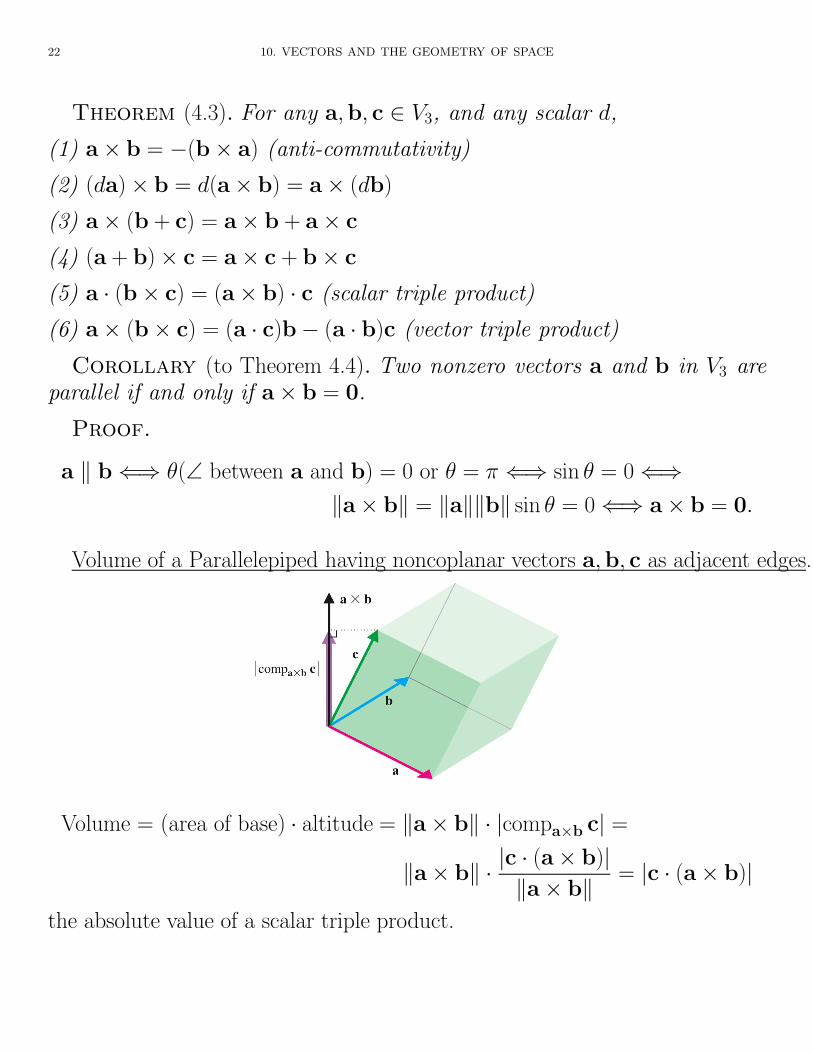
Volume of a Parallelepiped having noncoplanar vectors a,b, c as adjacent edges.
Volume = (area of base) · altitude = ka⇥ bk · |compa⇥b c| =
ka⇥ bk · |c · (a⇥ b)|ka⇥ bk = |c · (a⇥ b)|
the absolute value of a scalar triple product.
4. THE CROSS PRODUCT 23
Corollary (to Theorem 4.3). The scalar triple product of a,b, c is
a · (b⇥ c) = b · (c⇥ a) = c · (a⇥ b).
Note.
a · (b⇥ c) = a ·
������i j kb1 b2 b3
c1 c2 c3
������= ha1, a2, a3i ·
����b2 b3
c2 c3
���� i�����b1 b3
c1 c3
���� j +
����b1 b2
c1 c2
����k!
= a1
����b2 b3
c2 c3
����� a2
����b1 b3
c1 c3
���� + a3
����b1 b2
c1 c2
����=
������a1 a2 a3
b1 b2 b3
c1 c2 c3
������Example. Find the volume of the parallelepiped with 3 adjacent edges
formed by h�2,�1, 2i, h1,�1, 2i, and h2, 1, 3i.
V = |
�������2 �1 21 �1 22 1 3
������| = |6 + 4� 4 + 3 + 2 + 4| = 15
24 10. VECTORS AND THE GEOMETRY OF SPACE
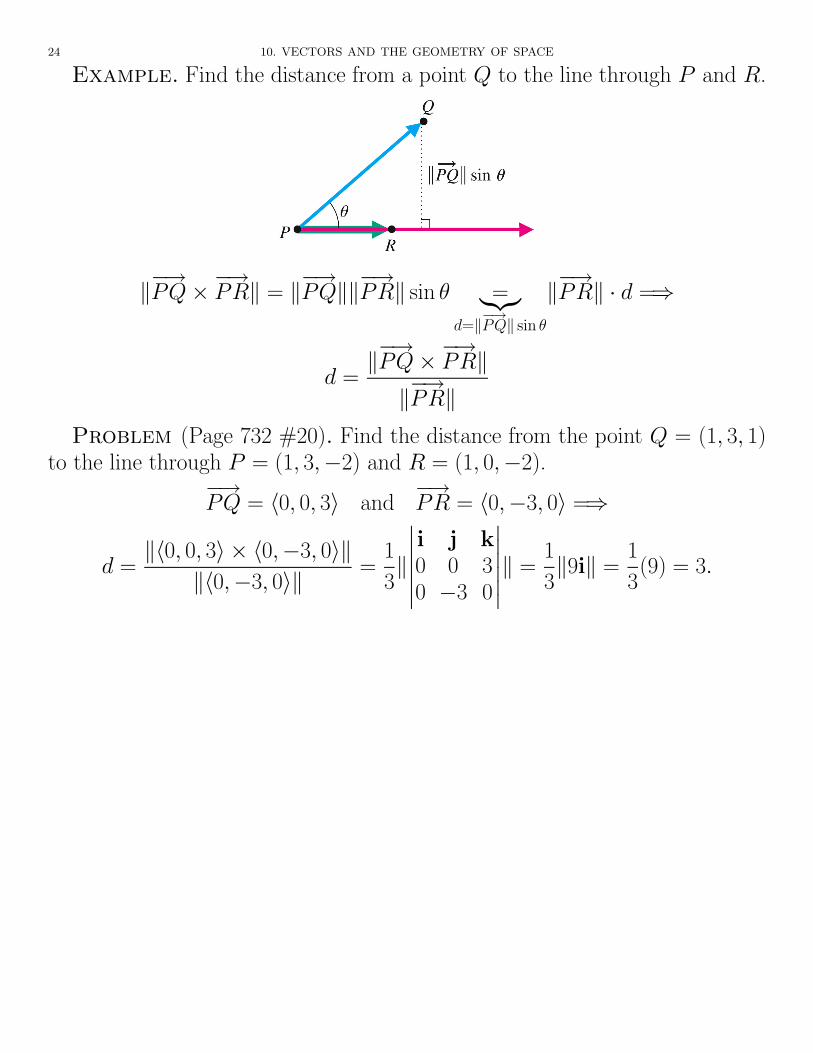
Example. Find the distance from a point Q to the line through P and R.
k�!PQ⇥�!PRk = k�!PQkk�!PRk sin ✓ =|{z}d=k�!PQk sin ✓
k�!PRk · d =)
d =k�!PQ⇥�!PRkk�!PRk
Problem (Page 732 #20). Find the distance from the point Q = (1, 3, 1)to the line through P = (1, 3,�2) and R = (1, 0,�2).
�!PQ = h0, 0, 3i and
�!PR = h0,�3, 0i =)
d =kh0, 0, 3i ⇥ h0,�3, 0ik
kh0,�3, 0ik =1
3k
������i j k0 0 30 �3 0
������k =1
3k9ik =
1
3(9) = 3.
4. THE CROSS PRODUCT 25
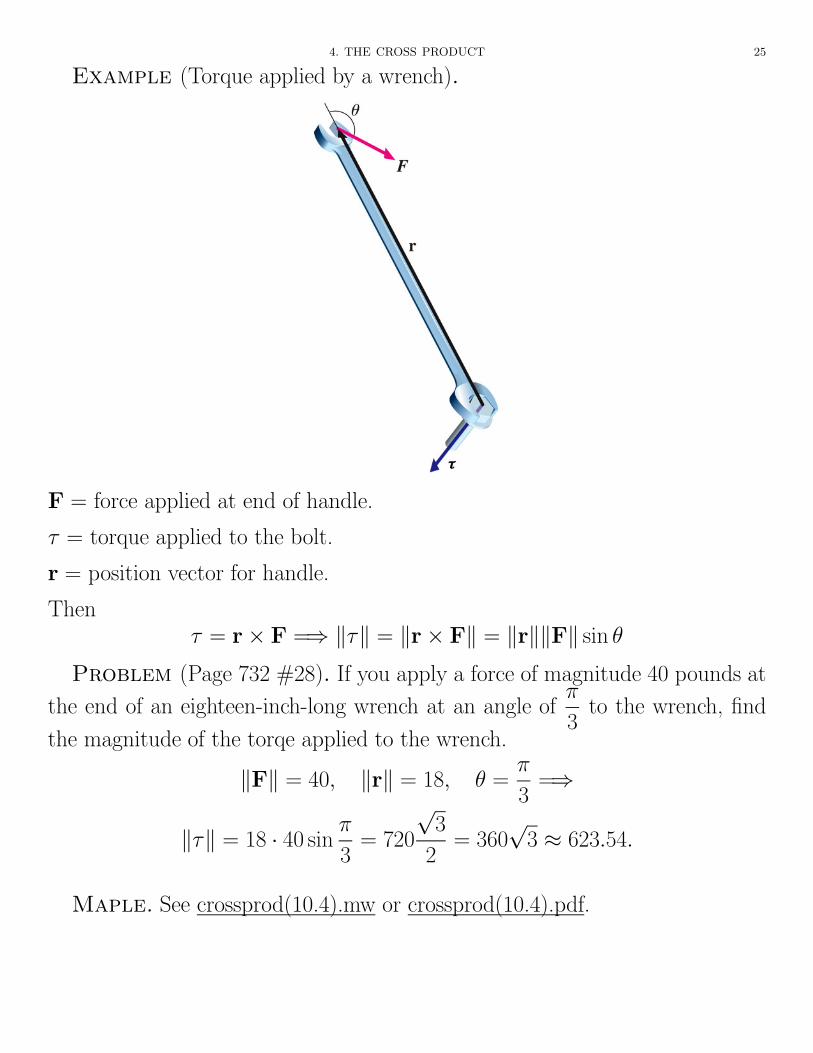
Example (Torque applied by a wrench).
F = force applied at end of handle.
⌧ = torque applied to the bolt.
r = position vector for handle.
Then⌧ = r⇥ F =) k⌧k = kr⇥ Fk = krkkFk sin ✓
Problem (Page 732 #28). If you apply a force of magnitude 40 pounds at
the end of an eighteen-inch-long wrench at an angle of⇡
3to the wrench, find
the magnitude of the torqe applied to the wrench.
kFk = 40, krk = 18, ✓ =⇡
3=)
k⌧k = 18 · 40 sin⇡
3= 720
p3
2= 360
p3 ⇡ 623.54.
Maple. See crossprod(10.4).mw or crossprod(10.4).pdf.
26 10. VECTORS AND THE GEOMETRY OF SPACE
5. Lines and Planes in Space
Lines in 3-space:
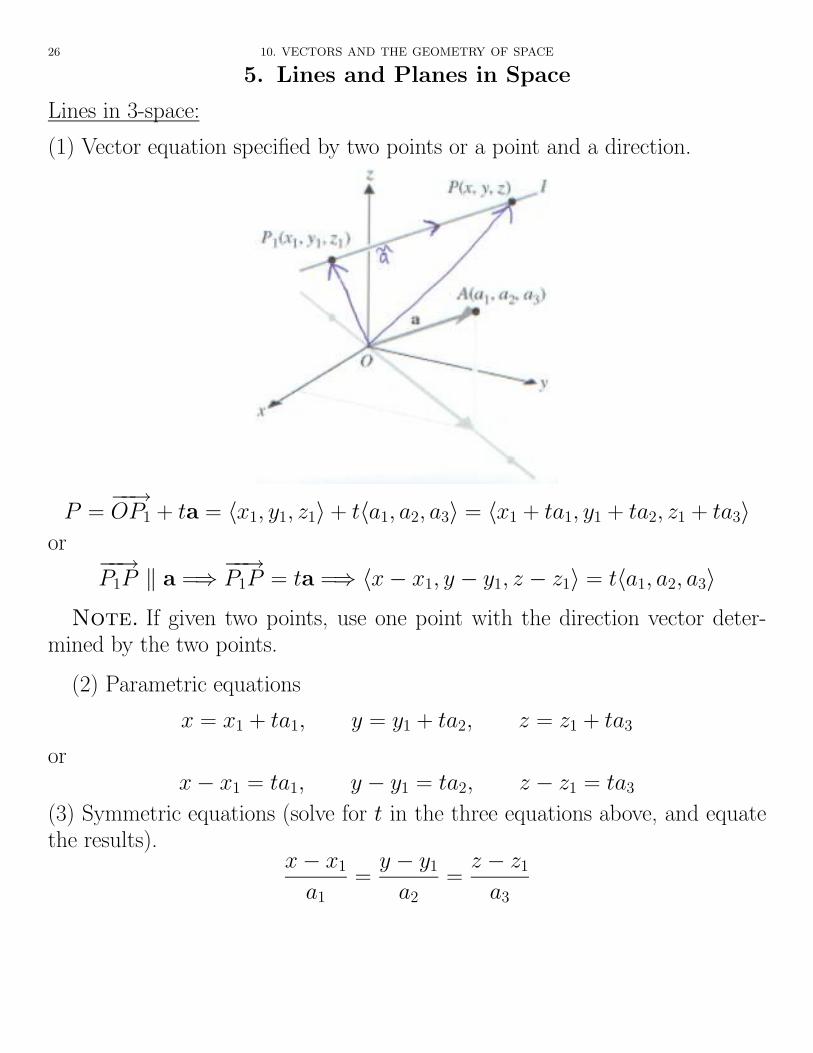
(1) Vector equation specified by two points or a point and a direction.
P =��!OP1 + ta = hx1, y1, z1i + tha1, a2, a3i = hx1 + ta1, y1 + ta2, z1 + ta3i
or��!P1P k a =) ��!
P1P = ta =) hx� x1, y � y1, z � z1i = tha1, a2, a3iNote. If given two points, use one point with the direction vector deter-
mined by the two points.
(2) Parametric equations
x = x1 + ta1, y = y1 + ta2, z = z1 + ta3
orx� x1 = ta1, y � y1 = ta2, z � z1 = ta3
(3) Symmetric equations (solve for t in the three equations above, and equatethe results).
x� x1
a1=
y � y1
a2=
z � z1
a3

5. LINES AND PLANES IN SPACE 27
Problem (Page 740 #8). Find the vector, parametric and symmetric equa-tions of the line through (�3, 1, 0) and perpendicular to both h0,�3, 1i andh4, 2,�1i.
h0,�3, 1i ⇥ h4, 2,�1i =
������i j k0 �3 14 2 �1
������ = h1, 4, 12i
is perpendicular to bothh0,�3, 1i and h4, 2,�1i. Then the vector equation is
hx + 3, y � 1, zi = th1, 4, 12i,the parametric equations are
x + 3 = t, y � 1 = 4t, z = 12t,
and the symmetric equations arex + 3
1=
y � 1
4=
z
12.
For t = 3, x = 0, y = 13, and z = 36, so (0, 13, 36) is on this line and eachquotient of the symmetric equations is 3.
Definition. Let l1 and l2 be two lines in R3, with parallel (or direction)vectors a and b, respectively, and let ✓ be the angle between a and b.
(1) l1 and l2 are parallel whenever a and b are parallel.
(2) If l1 and l2 intersect, then
(a) the angle between l1 and l2 is ✓.
(b) l1 and l2 are orthogonal whenever a and b are orthogonal.
(3) Nonparallel, nonintersecting lines are called skew lines.

28 10. VECTORS AND THE GEOMETRY OF SPACE
Problem (Page 740 #14). Determine whether the following lines are par-allel, skew, or intersect:8><
>:x = 1� 2t
y = 2t
z = 5� t
8><>:
x = 3 + 2s
y = �2
z = 3 + 2s
We have
hx� 1, y, z � 5i = th�2, 2,�1i and hx� 3, y + 2, z � 3i = sh2, 0, 2i.Since h�2, 2,�1i 6= ch2, 0, 2i, lines are not k.Do lines intersect? Equate x’s:
1� 2t = 3 + 2s =) 2t = �2s� 2.
Equate y’s and substitute:
2t = �2 =) �2 = �2s� 2 =) s = 0 and t = �1.
Substitute into z’s:5 + 1 6= 3 + 0,
so the lines do not intersect, and thus we have skew lines.

5. LINES AND PLANES IN SPACE 29
Planes in R3
A plane in space is determined by a vector a = ha1, a2, a3i that is normal tothe plane and a point P1(x1, y1, z1) lying in the plane.
A vector is normal to a plane if it is orthogonal to every vector in the plane.
(1) Linear equation:
a ·��!P1P = ha1, a2, a3i · hx� x1, y � y1, z � z1i =
a1(x� x1) + a2(y � y1) + a3(z � z1) = 0| {z }linear equation for the plane
Simplifying, every equation of the form
ax + by + cz + d = 0
is the equation of a plane with normal vector ha, b, ci 6= 0.
(2) Vector equation:
a ·��!P1P = 0
Definition. Two planes are parallel when their normal vectors are parallel,and orthogonal when their normal vectors are orthogonal.
30 10. VECTORS AND THE GEOMETRY OF SPACE
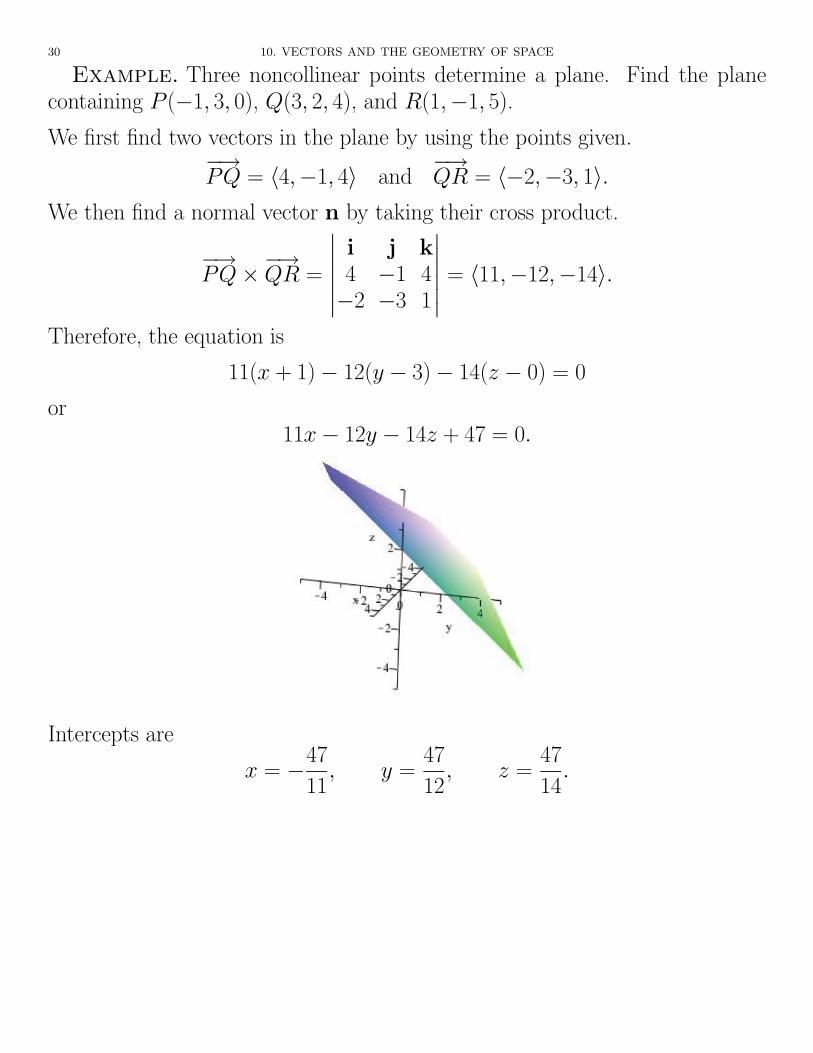
Example. Three noncollinear points determine a plane. Find the planecontaining P (�1, 3, 0), Q(3, 2, 4), and R(1,�1, 5).
We first find two vectors in the plane by using the points given.�!PQ = h4,�1, 4i and
�!QR = h�2,�3, 1i.
We then find a normal vector n by taking their cross product.
�!PQ⇥�!QR =
������i j k4 �1 4�2 �3 1
������ = h11,�12,�14i.
Therefore, the equation is
11(x + 1)� 12(y � 3)� 14(z � 0) = 0
or11x� 12y � 14z + 47 = 0.
Intercepts are
x = �47
11, y =
47
12, z =
47
14.

5. LINES AND PLANES IN SPACE 31
Problem (Page 740 #24). Find the plane containing the point (3, 0,�1)and ? to the planes x + 2y � z = 2 and 2x� z = 1.
Normal vectors to the two given planes are n1 = h1, 2,�1i and n2 = h2, 0,�1i.Then a normal vector to the sought plane is
n = n1 ⇥ n2 =
������i j k1 2 �12 0 �1
������ = h�2,�1,�4i.
Then the equation is
�2(x� 3)� y � 4(z + 1) = 0
or2x + y + 4z = 2.
32 10. VECTORS AND THE GEOMETRY OF SPACE
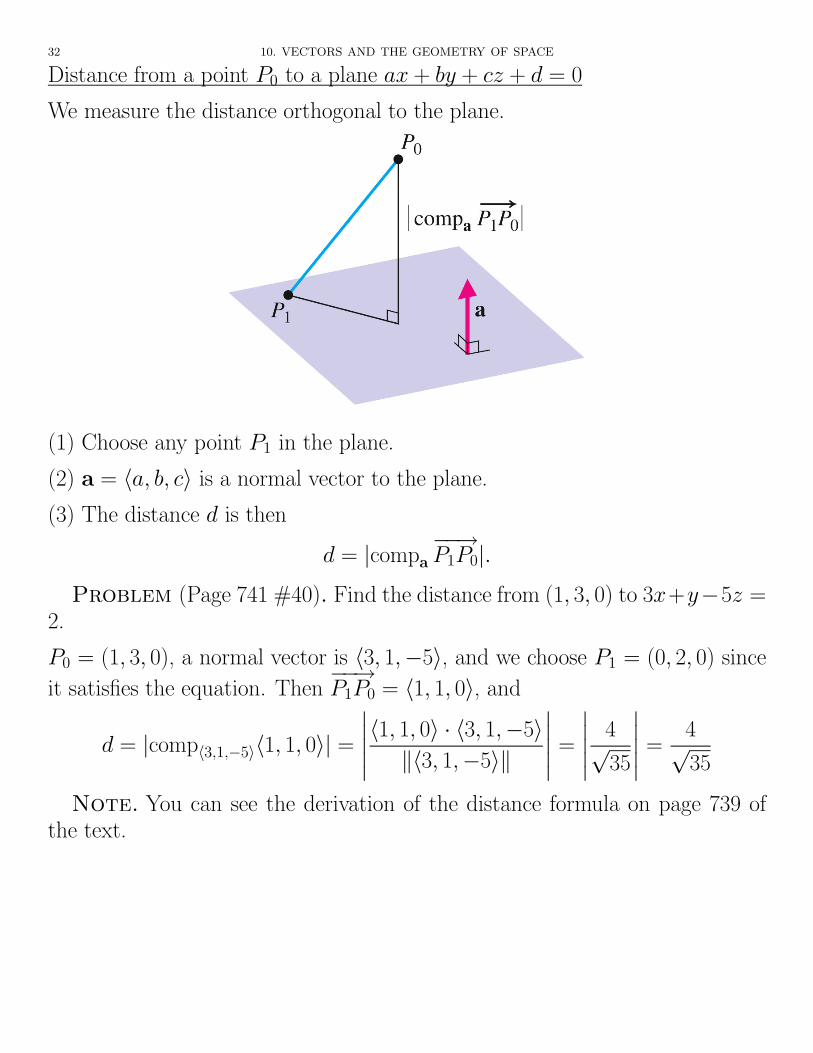
Distance from a point P0 to a plane ax + by + cz + d = 0
We measure the distance orthogonal to the plane.
(1) Choose any point P1 in the plane.
(2) a = ha, b, ci is a normal vector to the plane.
(3) The distance d is then
d = |compa��!P1P0|.
Problem (Page 741 #40). Find the distance from (1, 3, 0) to 3x+y�5z =2.
P0 = (1, 3, 0), a normal vector is h3, 1,�5i, and we choose P1 = (0, 2, 0) since
it satisfies the equation. Then��!P1P0 = h1, 1, 0i, and
d = |comph3,1,�5ih1, 1, 0i| =
�����h1, 1, 0i · h3, 1,�5ikh3, 1,�5ik
����� =
�����4p35
����� =4p35
Note. You can see the derivation of the distance formula on page 739 ofthe text.

5. LINES AND PLANES IN SPACE 33
Problem (Page 740 #36 — Finding the intersection of 2 planes). Find theintersection of 3x + y � z = 2 and 2x� 3y + z = �1.
(1) Possibilities are that the intersection is a line, a plane, or does not exist (theplanes are parallel.
Since normal vectors to the planes, h3, 1,�1i and h2,�3, 1i, are not parallel,the intersection here is a line.
(2) Solve each equation for the same variable – z seems easiest here.
z = 3x + y � 2 and z = �2x + 3y � 1
(3) Set these equal to each other.
3x + y � 2 = �2x + 3y � 1
(4) Solve for a second variable – we choose y.
2y = 5x� 1 =) y =5
2x� 1
2(5) Substitute this into either first equation.
z = 3x +⇣5
2x� 1
2
⌘� 2 =) z =
11
2x� 5
2or
z = �2x + 3⇣5
2x� 1
2
⌘� 1 =) z =
11
2x� 5
2(6) Set the third variable equal to a parameter t.
x = t
(7) Then parametric equations for the line are8><>:
x = t
y = 52t�
12
z = 112 t� 5
2
Note. Compare this problem to Example 5.8 on page 738.
34 10. VECTORS AND THE GEOMETRY OF SPACE
Maple. See Lines and Planes(10.5).mw or Lines and Planes(10.5).pdf
Also see Matching Lines.
6. Sufaces in Space
Maple. See surfaces(10.6).mw or surfaces(10.6).pdf
Also see Drawing Surfaces, Drawing 3D Surfaces, and Matching Quadric Surfaces.