Embed Size (px)
Citation preview

Vehicle Fleet Refueling Strategies to Maximize Operational Range
Abraham Mehrez and Helman I. Stern Department of Industrial Engineering and Management, Ben Gurion University of
the Negev, Beersheva, Israel
David Ronen School of Business, University of Missour iSt . Louis, St. Louis, Missouri 63121
The focus of this research is on seIf-contained missions requiring round-trip vehicle travel from a common origin. For a single vehicle the maximal distance that can be reached without refueling is defined as its operational range. Operational range is a function of a vehicle’s fuel capacity and fuel consumption characteristics. In order to increase a vehicle’s range beyond its operational range replenishment from a secondary fuel source is necessary. In this article, the problem of maximizing the range of any single vehicle from a fleet of n vehicles is investigated. This is done for four types of fleet configurations: (1) identical vehicles, (2) vehicles with identical fuel consumption rates but different fuel capacities, (3) vehicles which have the same fuel capacity but different fuel consumption rates, and (4) vehicles with both different fuel capacities and different consumption rates. For each of the first three configurations the optimal refueling policy that provides the maximal range is determined for a sequential refueling chain strategy. In such a strategy the last vehicle to be refueled is the next vehicle to transfer its fuel. Several mathematical programming formulations are given and their solutions determined in closed form. One of the major conclusions is that for an identical fleet the range of the farthest vehicle can be increased by at most 50% more than the operational range of a single vehicle. Moreover, this limit is reached very quickly with small values of n. The performance of the identical fleet configuration is further investigated for a refueling strategy involving a multiple- transfer refueling chain, stochastic vehicle failures, finite refueling times, and preposi- tioned fleets. No simple refueling ordering rules were found for the most general case (configuration 4). In addition, the case of vehicles with different fuel capacities is in- vestigated under a budget constraint. The analysis provides several benchmarks or bounds for which more realistic structures may be compared. Some of the more complex structures left for future study are described.
1. INTRODUCTION
This article addresses the problem of vehicle refueling strategies. In the case of vehicles powered by liquid fuel two salient factors help to determine a vehicle’s operational range: (i) the vehicle’s capacity to store fuel, and (ii) the vehicle’s rate of fuel consumption. When a vehicle’s required total fuel consumption exceeds its storage capacity, a fuel replenishment operation is necessary. Such refueling operations may be conducted from fixed or mobile fuel sources. In the case of fixed sources such as port facilities, fuel dumps, garages, and airports, the vehicle requiring fuel must travel to the source for replenishment. Mobile fuel sources, on the other hand, travel to a rendezvous point or accompany the vehicle to a point where the refueling operation is conducted. Mobile fuel sources are usually vehicles of the same genre as those
Naval Research Logistics Quarterly, Vol. 30, pp, 319-342 (1983) Copyright 0 1983 by John Wiley & Sons, Inc. CCC 0028-1441 /83/0203 19-24$03.40
320 Naval Research Logistics Quarterly, Vol. 30 (1983)
requiring replenishment, and may either be tanker-type vehicles designed with large storage capacities or nontanker types outfitted with special fuel transfer equipment.
Several authors have written about the relationship between the fuel consumption of a system and its various operational variables. For example, Avi-Itzhak [ l ] dealt with the problem of maximizing the output of a fleet of ships for a given quantity of fuel; Bracken and Longhill [2] considered minimizing refueling costs for a bomber fleet; Collins and Guthrie [3] dealt with area coverage by aircrafts; and Leitman [5] and Neustadt [7] minimized the fuel consumption of a spacecraft in changing position. Etschmaler [4] dealt with the problem of selecting refueling strategies for fixed refueling sources.
The focus of this research is on self-contained missions requiring round-trip travel from a common origin. For a single vehicle the maximal distance that can be reached without refueling before it must return to its origin is defined as its operational range. Under normal payload and weather conditions this range is determined by its fuel capacity and fuel consumption characteristics. In order to increase a vehicle’s range beyond its operational range, replenishment from a secondary fuel source is necessary. For missions where the use of fixed refueling sources or facilities is prohibited, all fuel used on the mission must be provided by mobile sources. This is common practice in the passage of vehicles through deserts, hostile territory, rescue operations, and other types of self-supported missions.
Consider a fleet of vehicles all departing from a common origin and returning to it after completion of the mission. There are no sources of fuel other than that carried by the vehicles themselves. An important question in planning such missions is: For given members of the fleet what is the maximal possible range attainable before they must commence their return trip to the point of departure? The answer, of course, depends on the physical composition of the fleet as well as its refueling strategy. In its most general case each vehicle of the fleet may possess different fuel capacities and different fuel consumption characteristics. Moreover, the refueling capabilities of each vehicle may differ, some capable of both receiving and transferring fuel to other vehicles while others may perform only one of these operations. Refueling strategies consist of a set of operational rules governing the type of fuel transfer operations allowed. The best policy for a given strategy will determine when and how much fuel is to be transferred in each of these operations.
Given a fleet of size n with a particular configuration and refueling strategy, the objective of the system is to maximize the distance traveled by a single vehicle or a fixed number of vehicles before returning to the origin. Since the number of possible configurations and strategies can become quite complex we shall limit this introductory study to a relatively simple structure, leaving more complex versions for a future investigation. This simple structure has the objective of maximizing the range of any single vehicle from a fleet of size n. Such a structure is said to be a “1 out of n” system. Since the solutions will be determined with n as a parameter they will also provide the solution to the “dual” problem. The dual problem is: What is the minimum fleet size needed to insure that the farthest vehicle can reach a range of distance Z from the origin?
2. FLEET CONFIGURATIONS AND REFUELING STRATEGIES
The fleet configurations shall be described in terms of the fuel capacity k, and the fuel consumption q, of each vehicle i in the fleet. Four fleet configurations may be

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 321
described. The first fleet configuration represents a fleet of identical vehicles with k, = k and qi = q. In the second fleet configuration all vehicles have the same fuel consumption rate but the fuel capacities differ. In configuration 3, the opposite is true: All vehicles have the same fuel capacity but their fuel consumption rates differ. Con- figuration 4 is the most general in which each vehicle possesses different fuel capacity and consumption characteristics. It is assumed that each vehicle can receive fuel from any other vehicle and transfer fuel to any other vehicle in the fleet.
We shall examine refueling strategies comprised of a chain of refueling operations. All vehicles leave the origin simultaneously with tanks at full capacity. A refueling operation is a set of fuel transfer activities in which one or more transfers (a transfer involves two vehicles) takes place after which one or more vehicles leaves the fleet to return to the origin. We may classify refueling operations as simple or complex. A complex refueling operation involves more than one vehicle transferring fuel and leaving the fleet. After v vehicles transfer fuel in such an operation they must im- mediately return to the origin, leaving v less vehicles proceeding away from the origin. Complex refueling operations may be referred to as many-to-many or many-to-one. In the former more than one vehicle may receive fuel in the refueling operation. On the other hand, simple refueling operations involve only one vehicle transferring fuel. If only one transfer is involved we say it is a one-to-one operation, otherwise a one- to-many situation occurs where a single vehicle refuels several other vehicles before returning to the origin. Since the vehicle, upon completion of all of its transfers, returns to the origin, the total number of vehicles proceeding away from the origin is reduced by one after each such operation. It follows that there are n - 1 ordered refueling operations, after which the last vehicle to receive fuel reaches its maximal range and returns to the origin. Due to the operational objections against simultaneous transfers only refueling strategies of the simple type will be considered.
2.1. Refueling Strategy 1 (Pure Refueling Chain)
The one-to-one situation defines a refueling strategy that can best be described as a “pure refueling chain” whereby the last vehicle that has received fuel is the next vehicle to transfer fuel. The behavior of this structure is depicted in Figure 1 where the kth refueling operation is completed at a distance C&, Rj from the origin. The value Rk represents the distance between the (k - 1)st and kth refueling operation. (R, and R, technically only involve one refueling operation.) The dotted arrow rep- resents the amount of fuel, U,, transferred in the kth transfer operation. The problem is to find the best policy, i.e., the values of Rk and uk that maximize the objective. It is assumed that the transfer of fuel takes place instantaneously and without loss.
2.2. Refueling Strategy 2 (Multiple-Transfer Refueling Chain)
The one-to-many situation describes a “multiple-transfer refueling chain. ” After the kth refueling operation there are n - k vehicles proceeding from the origin. In theone-to-many situation, the vehicle transferring fuel may perform from 1 ton - k - 1 transfers in succession before returning to the origin. The maximum number of transfers in this multiple-transfer operation is n - k - 1, and it is this strategy that we shall refer to as a multiple-transfer refueling chain. In a multiple-transfer operation we shall assume that the vehicle transferring fuel transfers fuel to each of the remaining vehicles in equal proportions. Unlike a pure refueling chain, after each refueling operation all

322 Naval Research Logistics Quarterly, Vol . 30 (1983)
Vehicle no.
R a n g e
Figure 1. Illustration of the operations of a pure refueling chain.
the vehicles proceeding away from the origin carry identical fuel reserves in their tanks. Figure 2 illustrates the behavior of this structure.
In order to provide a basic result used for the more complex problems, Section 3 is devoted to the case in which each of a set of n vehicles is assigned a fixed position in the refueling chain. We call this a “fixed refueling chain.” The remaining sections deal with the problem of variable refueling chains, i.e., determining the assignment of vehicles to their positions in the chain. In Section 4 the solution of a fixed refueling chain is used to provide a solution for fleet configuration 1-identical vehicles. In Section 5 a number of extensions to the identical vehicle case are investigated. The first such extension is to investigate the effect of changing the refueling strategy to that of a multiple-transfer refueling chain (strategy 2). This is followed by consideration of the effect of a finite refueling time and prepositioned fleet. The section ends with an investigation of the effect of an exponential vehicle failure rate on range. In Section 6 the result from Section 3 is again applied to the solution of the problem for non- identical fleet configuration 2. Section 7 treats the case of fleet configuration 3. The most general refueling problem, configuration 4, is treated in Section 8. In all of these

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 323
Vehicle no.
I c RI ' R2 ' R3 ' Rk-; R k ' ' R " '
R a n g e
Figure 2. Illustration of the operations of a multiple-transfer refueling chain.
sections, with the exception of Section 5 , the pure refueling chain strategy is considered. In Section 9 the maximal operational range for the case of vehicles with different fuel capacities using strategy 1 under a budget constraint is investigated. Section 10 ends the article with a conclusion describing further work.
3. FIXED REFUELING CHAIN
In this article it is assumed that each vehicle in the fleet is assigned to a position in the refueling chain. Index the vehicles according to their order in the chain such that vehicle number 1 is active only in the first refueling operation transferring fuel to vehicle number 2. Vehicle number 2 is active in two refueling operations: receiving fuel in the first operation and transferring fuel in the second operation. Vehicles i = 3,4, . . . ,n - 1 are also active in exactly two operations. The last vehicle in the chain, vehicle n, is active in receiving fuel from the (n - 1)st vehicle in the ( n - 1)st operation. Each vehicle i has a different fuel capacity ki, measured in units

324 Naval Research Logistics Quarterly, Vol . 30 ( 1983)
of fuel such as liters or gallons. All vehicles, however, are assumed to have identical fuel consumption rates (qi = q) units of fuel per distance traveled. These rates are assumed to be independent of the vehicle’s load profile. Before starting the problem and its formulation the following additional terms are defined:
di = a positive number representing the fuel capacity of vehicle i in terms of equivalent distance units = ki/q.
Rk = the distance from the point where the (k - 1)st refueling operation ends to the start of the kth refueling operation (k = 1,2, . . . ,n - 1). The zeroth refueling operation occurs at the origin point of all vehicle departures and is not considered part of the refueling chain.
R, = the distance from the (n - 1)st (the last) refueling operation to the farthest point reached by the last vehicle before it commences its return to the origin point.
uk = the amount of fuel transferred, in equivalent distance units, from the vehicle in the kth position to the vehicle in the (k + 1)st position during the kth refueling operation.
D = [d,,d,, . . . ,d,] = the sequence of vehicle fuel capacities arranged ac- cording to the fixed positions of the vehicles in the refueling chain. (Here it is assumed that vehicle i is assigned to the ith position in the refueling chain.)
Z(D) = the distance traveled by the last vehicle in the sequence D from the origin to its turnaround point (the maximum distance reached by any vehicle in the fleet) = RI + R2 + * * + R,.
Problem P1 is as follows: Given a fixed refueling chain D, find the values of Rk, k = 1,2, , . . ,n, and u k , k = 1, . . . ,n - 1, such that Z(D) is maximal. This is subject to constraints on the amount of fuel transferred during each refueling operation k. Empty-tank capacity constraint of the receiving vehicle:
Return fuel constraint of the transferring vehicle:
where V , = 0, U,, = 0. The first constraint states that the amount of fuel transferred in the kth refueling
operation cannot exceed the empty fuel capacity of the receiving vehicle. The empty capacity of a vehicle is the amount of fuel a vehicle is capable of receiving in order to fill its tank to capacity. This amount is equal to the amount of fuel the vehicle has burned (in equivalent distance units) up to the point of the kth operation. The amount

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 325
burned is equal to the sum on the right-hand side of the first constraint since the kth operation takes place at a distance RI + R2 + * * - + Rk from the origin. The second constraint reflects the requirement that the vehicle transferring fuel reserves an amount needed for the return trip to the origin. Thus, the initial fuel plus the amount received in the last transfer operation less the fuel required for a two-way trip to the kth refueling operation determines the maximum amount of surplus fuel available for transfer. By defining V,, = 0 the second constraint can be used in a fictitious operation k = n to insure that the nth vehicle has a nonnegative “surplus fuel” so that it can return to the origin.
Since the variables v k and Rk cannot realistically take on negative values, P1 may be stated in linear programming form as Problem LP (D):
k
subject to uk - Rj 6 0, k = 1, . . . , n - 1, (3) j= I
where U, = U,, = 0.
Intuitively it seems that the maximal range will be achieved when all the fuel in the system is utilized. Thus, at the kth operation the kth vehicle should transfer all of his surplus fuel to the (k + 1)st vehicle. Otherwise, the kth vehicle will return to the origin with more than an empty tank. Setting (4) to an equality should reflect this. After the (k - 1)st operation assume the kth vehicle is full and has surplus fuel. As the time of the kth operation is delayed this surplus fuel is decreased, and it is advisable to transfer it as soon as possible. However, if transfer occurs too soon the receiving vehicle (k + 1) will not have enough empty capacity to take on the surplus and some fuel will have to be dumped. It is more intelligent to wait until the empty capacity of the receiving vehicle increases to a point just equal to the surplus fuel of the transferring vehicle. This point occurs when (3) is an equality. This converts the constraint set of the LP to 2n - 1 equalities and 2n - 1 nonnegative variables (all the previous slack variables are zero), and there is one unique basic solution with basic variables Vk (k = 1, . . . ,n - 1) and Rk (k = 1, . . . ,n). The condition under which this closed- form solution is optimal for the original LP(D) is stated in the following theorem:
THEOREM 1: If the basic solution v k ( k = 1, . . . ,n - I), Rk (k = 1, . . . ,n) is a feasible solution for LP(D) it is also an optimal solution for LP(D). LP(D) is taken to be its original form with the slack variables.

326 Naval Research Logistics Quarterly, Vol. 30 (1983)
R , U, RZ UZ R, . . . UnTZ Rn- , Un-, R.
2 1 0 0 O . . . 0 0 0 0
- 1 I 0 0 o . . . 0 0 0 0
2 - 1 2 1 0 . . . 0 0 0 0
- 1 0 - 1 1 0 . . . 0 0 0 0
2 0 2 - 1 2 . . . 0 0 0 0
2 0 2 0 2 . . . - 1 2 1 0
- 1 0 - 1 0 - 1 . . . 0 - 1 1 0
2 0 2 0 2 . . . 0 2 - 1 2
PROOF: Arrange the coefficient matrix and right-hand side, b, of the equations corresponding to (3) and (4) as shown below.
b
d, 0
d2
0
d3
d.-, 0
d,
This matrix is of size (2n - 1) x (2n - 1) and represents the basis B when all of the slack variables are nonbasic (set to zero). To check the solution for optimality calculate C$-’uj - cj for all the slack columnsj(j = 1, . . . ,2n - 1). The price vector C, of the basic variables is (1 0 1 0. . .O 1 0 l), the activity vector of the j th slack variable is uj , and cj is the price coefficient of thejth slack variable (cj = 0 for all slacks). Since only the j th element in uj is equal to 1 and all the rest are 0, it is sufficient to calculate C a w ’ . Finding B-l by Gauss elimination and computing C a - ’ as shown in the Appendix results in
Since C 3 - I > 0 the optimality conditions for the simplex method are satisfied. If, in addition, the uk and Rk are nonnegative (i.e., feasible) they provide the optimal solution to LP(D). Q.E.D.
The values of the basic variables may be found by computing B-’b directly or by simple back substitution of the equality versions of (3) and (4).
SOLUTION TO LP(D) The exact form of the basic variables are determined as

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 327
k- I
Rk = -(2/3) 2 (1/3)k-idi + (1/3)dk, k = 1, . . . ,n - 1, i = 1
n - I
R, = -(1/2) c (1/3)"-'d, + (1/2)dn. i= 1
The corresponding value of the objective function is n 1
2 z(0) = c Rk = C,B-'b = - [(1/3"-l)dl 4- (1/3"-*)d2 + * - *
k = I n
+ (1/3"-')di + * - * + (l/3)dn-l 4- 4 1 = (1/2) c (1/3n-i)di. (9)
From (7) it is seen that all the u k are positive (since the di are positive), but the feasibility of the Rk are determined by the nature of the refueling chain, i.e., by the magnitude of the fuel capacities and position of the respective vehicles in the chain. In the next section a special case in which this basic solution is feasible is presented. Before proceeding, however, note that the dual prices of interest are those associated with the fuel transfer restrictions (4). It is observed from (9) that increasing the fuel- carrying capacity (di) of the vehicle in the ith position by A will increase the operational range of the system by A/2 3"-'. This result implies that for a fixed-position refueling chain of size n it is relatively more important to increase the fuel capacity of the vehicles with higher i, those farther down in the refueling chain.
i= I
4. IDENTICAL VEHICLES
When all the vehicles are identical any ordering of the vehicles in the refueling chain results in the same sequence D = [d,d, . . . ,d]. In this case the following corollary provides the solution.
COROLLARY 1: The nonslack basic solution {uk, Rk} to LP(D) is feasible and optimal for identical vehicles (di = d > 0, i = 1, . . . ,n).
PROOF: k
u k = d c ( 1 / 3 ) ' > 0 , k = l , . . . , n - 1 . i = I
The variables Rk may be written in the form:
The value of the objective function becomes n - I
Z(D) = (d/2) 2 (1/3y. i = O

328 Naval Research Logistics Quarterly, Vol. 30 (1983)
THE IDENTICAL FLEET SOLUTION
vehicles is Specializing (9) for identical fuel capacity d, the maximal range for a fleet of n
t* ~ I
Z(D) = ( d / 2 ) (1/3)'. r = O
Taking the limit over n yields the maximal possible operational range:
limZ(D) = 0.75d. n-+m
This range is only 50% more than that possible by a single vehicle (for n = 1 the operational range is one-half of the fuel tank capacity, i.e., 0.5d). This is quite surprising considering the investment required. However, it can be seen from Table 1 that the major portion of the maximal possible range can be reached when n = 4 or 5. For larger values of n the addition to total range (AZ) rapidly decreases in n.
5. EXTENSIONS TO THE IDENTICAL VEHICLE CASE
In this section the following extensions to the identical vehicle problem are described: (a) strategy 2 (multiple-transfer refueling chain), (b) finite refueling time, (c) a pre- positioned fleet, and (d) stochastic extensions where vehicles have exponential failure rates.
5.1. Strategy 2: Multiple-Transfer Refueling Chain
From a given point n identical vehicles depart together. At a predetermined point one vehicle transfers all the fuel it has left (in excess of the quantity required for him to return to the origin) to all the other vehicles, proportioned in equal quantities, and returns to the origin. The same is done at n - 2 succeeding points until only one vehicle is left. That vehicle reaches its maximal range and returns to the origin. To analyze the behavior of this strategy define as before:
d = fuel capacity of a single vehicle (in distance units); Ri = distance from the point at which the ith vehicle last received fuel to the point
where it transfers its surplus to the remaining vehicles.
Since the vehicles are identical, in order to maximize the total range the surplus fuel of the transferring vehicle must be equal to the empty capacity of the receiving vehicles.
Table 1. Maximal operational range for n identical vehicles. n Z(D) R, R2 R3 R4 Rs UI U2 U1 U4 LUX%)
1 0.5 0.5 2 0.6667 0.333 0.3333 0.3333 33.3 3 0.7222 0.3333 0.1111 0.2778 0.3333 0.4444 8.3 4 0.7407 0.3333 0.1111 0.0370 0.2593 0.3333 0.4444 0.4815 2.6 5 0.7469 0.2222 0.1111 0.0370 0.0124 0.2531 0.3333 0.4444 0.4815 0.4398 0.8

Mehrez, Stern, and Ronen: Vehicle Fleet Refueling Strategies 329
This can be verified by an analysis of the resulting linear programming problem as was done for strategy 1. For the first refueling operation:
d - 2RI = (n - 1)R1, R I = d / ( n + 1).
For the kth refueling operation:
- Rk-1 - 2Rk = (n - k)Rk,
Rk = ( d - R I - * * * - R k - , ) / ( n + 2 - k) . (15)
(16)
d - R , - . . .
Calculating Rk recursively yields:
Rk = d / ( n + I ) , k = 1, . . . ,n. (17)
Since uk, the total amount of fuel transferred, equals the right-hand side of (15),
uk = (n - k)R, = d(n - k ) / ( n + l), k = 1, . . . ,n - 1. (18)
These results indicate that all refueling operations are equally spaced and the amount of fuel transferred decreases as the fleet progresses. For early refueling operations the vehicle transferring fuel has more spare fuel to transfer since he has less distance to travel back to the origin. Also, more fuel can be accepted because there are more vehicles available to accept fuel. For operations near the end of the chain there are less vehicles available to accept fuel, and the transferring vehicle has less surplus fuel since it has a larger distance to travel back to the origin. The total range of the farthest vehicle is
n
2, = Rk = n d / ( n + 1). k = 1
Note that the maximal operational range is bounded by limwm 2, = d which is twice the operational range of a single vehicle. Table 2 compares the behavior of the two simple refueling strategies. It is seen from Table 2 that strategy 2 can provide a longer range (for n > 2), but the number of necessary transfer operations increases quite rapidly with the fleet size n.
5.2. Finite Refueling Time
Up to this point all the analyses and their results were obtained under the assumption that the transfer of fuel in each refueling operation takes place instantaneously. Let Tk be the distance in equivalent fuel units traveled by the pair of refueling vehicles during the kth refueling operation. If the vehicles are ground vehicles, and it is necessary for the fleet to stop during the refueling operation, then Tk = 0 and the assumption of instantaneous fuel transfer is valid. Otherwise, assume q is the amount of fuel that can be transferred per unit of fuel consumed during the transfer operation.
For strategy 1 and an identical fleet of vehicles, the maximal operational range is reached under the policy: Transfer fuel when the surplus capacity of vehicle k is equal to the amount of empty capacity of the vehicle receiving fuel (vehicle k + 1). The amount of fuel required at the start of this operation is Zf,, Ri. If the vehicles travel an additional distance Tk during the fuel transfer then z:=, Ri + Tk units of fuel must

330 Naval Research Logistics Quarterly, Vol. 30 (1983)
Table 2. Comparison of refueling strategies for identical fleet.
Strategy 1 2
Total range 112 [ z-. i I , 3 d l l
nd n + l -
(n - l)n 2 Number of transfers n - 1
lim (total range) It-=
single vehicle range I .5 2.0
Number of vehicles, n ___ ~
Strategy 2 3 4 5 6
Total range 1 0.67d 0.726 0.74d 0.75d 0.75d 2 0.67d 0.75d 0.8Od 0.83d 0.86d
Number of 1 1 2 3 4 5 transfers 2 1 3 6 10 15
Range increase 1 33 44 49 50 50 over single 2 33 50 60 67 72 vehicle (%)
be transferred. This should be equal to qTk, i.e., the number of units of fuel (in equivalent distance units) that can be transferred over distance Tk. Thus,
The equivalent distance traveled by the receiving vehicle at the time the fuel transfer operation is completed is
i = I
Since in the usual case q >> 1, the prior analysis holds with Rk replaced by
Under strategy 2 the amount of fuel transferred is [q / (q - 1)IRk.
n - k n - k - l
(n - k ) ~ , + X ( n - k - i)Tf+' = q Z T : , i = O i = I
where Ti is the distance traveled during transfer of fuel to the ith receiving vehicle within the kth refueling operation (i = 1,2, . . . ,n - k).
5.3. A Prepositioned Fleet
Suppose the fleet is prepositioned a distance x from the origin (at point 0) along a direct line of sight to the point of maximal range. Again consider a multiple-transfer refueling chain comprised of n - 1 ordered refueling operations with distance Rk

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 33 1
defined as before. The maximal range (measured from 0) for a fleet of n identical vehicles starting at distance x from the origin, each with fuel d , is determined as
where R&,d,n) = (d - x ) / ( n + l) ,
Note, that the additional range for prepositioning the fleet a distance x in advance is x / ( n + l) , i.e.,
X X +-= Z(O,d,n) + - Z(x,d ,n) = - n + l n + l n + 1 ' dn
Of interest for the next section are the following identities:
Z(x,d,n) = x + Z(0,d - x,n) , R,(x,d,n) = Rk(O,d - x,n) .
5.4. Stochastic Extension Where Vehicles Have Exponential Failure Rates
These results will be obtained under the operation of strategy 2 for a fleet of identical vehicles. Recall that the optimal policy under this situation calls for refueling operations at equally spaced intervals of d / ( n + 1 ) distance units, where d is the capacity of each vehicle in a fleet of n.
Once a vehicle failure is detected the vehicle transfers all of its fuel to the remaining vehicles as in strategy 2. Note that if the transfer is conducted before the scheduled time of the next refueling operation, some surplus fuel will remain. After each refueling operation all the vehicles are again at maximum capacity d and the fleet proceeds with one less vehicle.
Let E k ( d ) represent the expected maximal range of a 1-out-of-k system, each de- parting from a point 0 with fuel d , from which an amount of fuel at least equal to the return trip to 0 is reserved. For strategy 2 the planned refueling points are spaced a distance R = d / ( n + 1 ) apart. Two events may now be defined: no failures occur between two refueling points (case a), or a failure occurs before the fleet reaches the next planned refueling point (case b).
If case a occurs, then the conditional expected range of the system from point 0 (where point 0 is taken as the last refueling point) is R + E k - ' [ d - R ] . This represents the distance to the first refueling point plus the expected distance of a system of k - 1 vehicles each with fuel d - R . The actual amount of fuel carried by each vehicle at the point R is d as it has just been refueled to capacity, but it may only use d - R units of fuel to extend its range over a round trip from the point R and back to R . The remaining units are reserved for the last link of the return trip to the point 0.
Suppose case b occurs, that is, the first failure occurs before the next refueling point at a distance r from the point 0 (0 < r I R), then the conditional expected range of the system from 0 is r + E k - ' [ d - rl.
332 Naval Research Logistics Quarterly, Vol. 30 (1983)
Note that from the identity of Section 5.3 above, this is equivalent to the expected range of a prepositioned fleet of size k - 1 at distance r which could have been written as Ek- ' [ r ,d ] .
The probability of an event of type a is J; kAe-k"dr. Unconditioning on the basis of an exponential failure rate A yields the following
recursive equation for the expected maximal range of a fleet of k vehicles:
Ek(d) = I," kAek"(r + Ek- ' [d - r])dr + (R + Ek- ' [d - R ] ) 1; kAe-"'dr. (21)
The expected maximum range of a fleet of n vehicles each with fuel d may now be computed recursively from Ek(d) , k = 0,1,2, . . . ,n, where Eo(d) = 0.
The reader is cautioned to recognize the restricted circumstances under which the results are valid.
(a) The probability that a vehicle fails during the return portion of its travel (after all fuel has been transferred or, in the case of the last vehicle, after it has reached its maximal range) is not considered.
(b) The event of a vehicle failure does not preclude the vehicle from transferring its fuel to other vehicles. Such a situation may arise in the event that the decision is taken to abort the vehicles advance due to a mechanical or operator failure. Events in which the vehicle is destroyed or its fuel transferability is somehow compromised are not considered.
(c) Immediately upon the detection of a vehicle failure a refueling operation begins. The failed vehicle, using its surplus fuel, refills the tanks of all the remaining vehicles in the fleet to capacity.
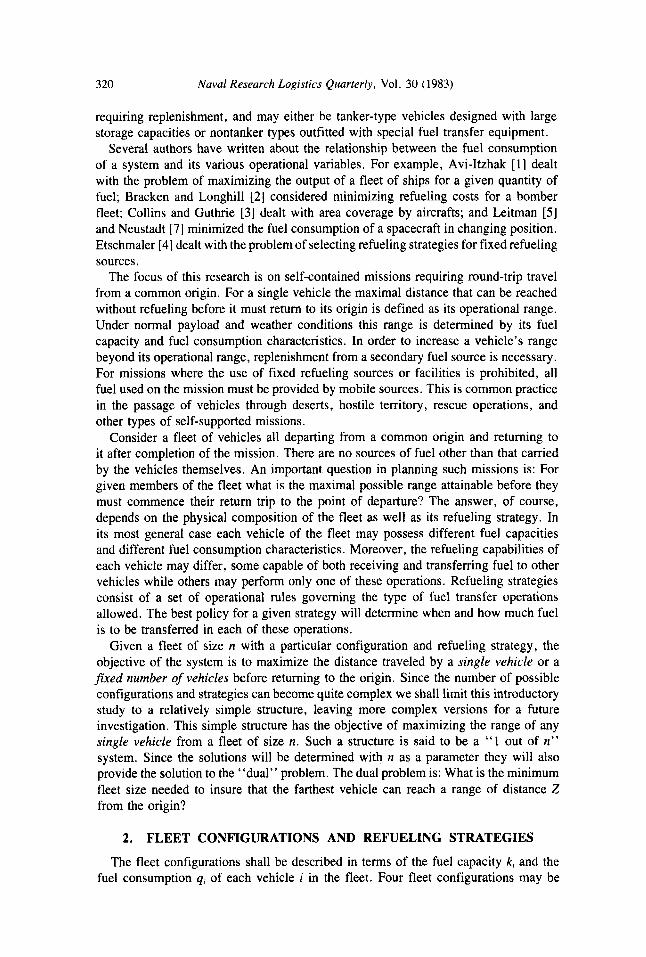
Values of E"(d) for different d, A , and n are shown in Table 3. Note that the expected range is pointwise concave decreasing in A and convex nondecreasing in d and n.
Table 3. Expected range under exponential failure rate for strategy 2 and identical vehicles.
Failures per unit distance (A) Fuel No. of
capacity (d) vehicles (a) 0 1 2 3 4 5
1 1 2 3 4
2 I 2 3 4
3 1 2 3 4
4 I 2 3 4
5 I 2 3 4
0.50 0.39 0.32 0.26 0.22 0.18 0.67 0.56 0.46 0.38 0.32 0.27 0.75 0.65 0.55 0.46 0.39 0.34 0.80 0.71 0.61 0.52 0.44 0.38
I .00 0.63 0.43 0.32 0.25 0.20 1.33 0.92 0.65 0.48 0.37 0.30 I S O 1.10 0.78 0.58 0.45 0.36 1.60 1.22 0.89 0.66 0.51 0.41
1.50 0.78 0.48 0.33 0.25 0.20 2.00 1.15 0.71 0.49 0.37 0.30 2.25 1.39 0.87 0.60 0.46 0.37 2.40 1.56 0.99 0.69 0.52 0.42
2.00 0.86 0.49 0.33 0.25 0.20 2.67 1.29 0.74 0.50 0.37 0.30 3.00 1.57 0.90 0.61 0.46 0.37 3.20 1.77 1.02 0.69 0.52 0.42
2.50 0.92 0.50 0.33 0.25 0.20 3.33 1.37 0.75 0.50 0.37 0.30 3.75 1.68 0.91 0.61 0.46 0.37 4.00 1.90 1.03 0.69 0.52 0.42

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 333
These results provide a lower bound on complete failures, i.e., failures of the type that preclude transfer of the vehicle's fuel. For this situation [(b) and (c) above do not hold] the results may be obtained by replacing ( r + Ek-'[d - r ] ) by (r - Ek-l[d - 2rl) in Equation (21).
6. VARIABLE REFUELING CHAIN AND DIFFERENT FUEL CAPACITIES
In this problem it is assumed that each vehicle i in the fleet has a different fuel capacity ki but the rates of consumption are identical, qi = q. In Section 7 it is then shown that the problem with different fuel consumptions and identical capacities is equivalent to the former. The variable refueling chain problem is one in which the positions of each vehicle in the chain are not predetermined. Define a refueling chain as a sequence of integers [1],[2],[3], . . . ,GI, . . . , [n ] , where [ j ] represents the index number of the vehicle assigned to the j th position in the refueling chain. Let D = [d[ll ,d121, . . . 4,], . . . ,dml] represent, as before, the fixed sequence of vehicle fuel capacities. The problem now has the additional element of finding the best vehicle assignment in the refueling chain.
MIXED-INTEGER PROGRAM FOR THE DIFFERENT FUEL CAPACITY PROBLEM
The different fuel capacity problem is formally presented as a mixed-integer pro- gramming problem. Define an assignment variable x i k = 1 if the ith vehicle is assigned to the kth position in the refueling chain and zero otherwise. This is a direct extension of LP(D) .
PROBLEM MIP: n
maximize z = Max C Rk, k = I
k
subject to uk - 2 Rj 2 0, j = I
k = l , . . . , n - 1,
(22)
k = 1, . . . ,n, (24)
i = 1, . . . ,n, (25)
k = 1, .. . . ,n, (26) i,k = 1, . . . ,n, (27)
The solution of this problem is derived in two steps. In the first step the optimal order of vehicles in the refueling chain is determined. This defines a fixed chain so that in the second step the results of Theorem 1 can be applied to complete the solution.

334 Naval Research Logistics Quarterly, Vol . 30 ( 1983)
THEOREM 2: Given n vehicles with capacities di (in equivalent distance units). For any feasible solution to MIP, {Z&Uk,Rk} where Xi, defines a refueling chain D = dIllrd121r . . . ,d,,,, there exists a feasible ordered-chain solution {Z’,X;, ,Ui,R;}, d{k] I d;k+l] which takes on the same value of the objective Z’ = 2.
PROOF Assume in the chain D there exists a pair of vehicles for which d[k] > d[k+ The vehicle in the kth position transfers a quantity of fuel u k at the [klth refueling operation. Before the transfer, vehicle [k] has an amount of fuel in its tank equal to
In the above equation and what follows brackets [ ] are dropped from the subscripts for simplicity. Vehicle [ k + 11’s remaining fuel is
Vehicle [k] can transfer Uk and has enough to return to the origin without it. Upon the transfer either (i) uk 2 Z k f l + Uk+l or (ii) uk < 2&+, + Uk+l is true. The amount % , + I + Uk+l is the additional consumption required of the [ k + l]st vehicle if it is to continue and participate to the [ k + llst refueling operation before it returns to the origin. If (i) holds, then the [ k + l]st vehicle is not needed. Its contribution can be done by the [klth vehicle refueling the [k + 2]nd vehicle directly. If (ii) holds, then the [ k + l]st vehicle must have had a surplus of ( X , + Uk+,) - uk at the refueling point or it would not have been able to return. In this case, sincef, is greater than&+, (the [klth vehicle had more fuel than the [k + llst), the [ k + l]st vehicle is not needed. Thus, in both cases the [ k + llst vehicle is not needed, and its con- tribution can be carried out by the larger vehicle.
Now create a new sequence by removing the [k + l]st vehicle from the [ k + l]st position and insert it after the position q such that dlql > d[k+ where drql = Max{dIil/ dIil > d[k+l] , i < k } , to create a new sequence:
{[ll, . . . ,[qI.[k + II,[q + 11, . . . ,[kI,[k + 21, . . . ,[nl).
The values of R for the new sequence will be the same as the old except for R,+ , = 0 , R k + , = Rk + R k + , , with the objective remaining unchanged: Z’ = Z . Repeating this shift operation for any unordered pair of vehicles will result in the nondecreasing ordered chain D‘ = dill I d,& 5 . . . I d;,] with Z’ = Z . Q.E.D.
The solution to MIP can now be derived in two steps: (i) Theorem 2 allows the problem to be reformulated as problem LP(D’), where D’ defines a fixed refueling chain, and (ii) Theorem 1 and Theorem 3 (presented below) assure feasibility and optimality of a solution in which all the fuel is consumed.
THEOREM 3: Let X be a permutation solution to (27) and (25) such that d,,, = di if Xik = 1. The optimal value of MIP is Z ( x ) = (1/2) Z;=, ( d ; 1 / 3 ~ - , ) , where dlk-11 5 41, k = 1,2, . . . ,n; (d/q = 0).
PROOF: From Theorem 2 the ordered refueling chain D‘ provides a solution to MIP that is no worse than any other permutation of the vehicles. Thus, it is only

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 335
necessary to examine the reduced problem LP(D'). Using the geometric series and the fact that d{k- I d[k, it is shown that Rk L 0, and hence the nonslack basic solution is feasible.
By Theorem 1 this solution is also optimal with value Z(D' ) = (1/2) dn3n-k. Q.E.D.
7. THE DIFFERENT FUEL CONSUMPTION RATE PROBLEM
Consider the case where all vehicles have the same fuel capacity k, = K (in units of fuel) but different fuel consumption rates qi (in quantity of fuel consumed per unit distance traveled).
Following arguments similar to those of problem MIP, the problem is formulated as the following mixed-integer nonlinear program:
PROBLEM MINLP- 1 :
k = 1 , . . . ,n, (32)
The solution to this problem is also derived in two steps: (i) The optimal order of the vehicles is determined by Theorem 4, after which the problem can be reformulated as a LP problem, and (ii) feasibility and optimality of a solution for which all the fuel is consumed can be displayed using arguments similar to that used for prior config- urations.
THEOREM 4: An optimal solution to problem MINLP- 1 is given by ordering the vehicles in the refueling chain according to nonincreasing fuel consumption rates, i.e., q, 2 q* 2 q 3 z * * * z qn.

336 Naval Research Logistics Quarterly, Vol. 30 (1983)
PROOF: The proof, which is similar to that of Theorem 2, is omitted.
Let X be a permutation solution to (32) and (33) such that q l k l = q, if x,k = 1. Let = Kfqpp 011;~ = U ~ 1 ; 1 / q ~ k ] ~ fit = C f 1 k j / q j t + i j r and D = [di,l,dizi, . . . ,din]]. The
MINLP-1 formulation for the different fuel consumption rate problem can now be reduced to the following LP problem (where the brackets [ ] have been dropped for simplicity). PROBLEM LP(b):
maximize z = Rk, n
k = I
k
subject to fi; - C R, 5 0, k = l , . . . , n - 1, (35) ,= I
k
U - f i l - 1 2 C R, 5 i k j k = 1, . . . ,n, (36) ,= 1
0k,Rk 2 0, where 00 = 0, on = 0, d k = K/qk, 0 k = Uk/qk,
6: = uklqk+1? q1 2 q* r q3 r . * . 2 qn.
We note that the solution of LP(b) is a linear function of q[k] which can be derived easily in a similar fashion to that taken in the determination of the solution of LP(D).
8.
This problem synthesizes the assumptions of the former two-it allows different fuel capacities of the vehicles (k , ) as well as different fuel consumption rates (qi) . Under a pure refueling chain strategy the problem may be formulated as follows:
DIFFERENT FUEL CAPACITIES AND CONSUMPTION RATES
PROBLEM MINPL-2: n
maximize z = C Rk,
subject to k = I
(30), (32), (33), (34) and
k = 1, . . . ,n. (31a)
In most practical situations higher fuel consumption is associated with higher ca- pacity which precludes specialization of prior results.
An ordering rule which will assure an optimal solution to this problem has not been found. However, Theorem 5 below indicates that in the optimal solution all the fuel is consumed, i.e., all the slacks are nonbasic. Thus, the solution space for problem MINLP-2 may be reduced from n! (61:) to n ! .
Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 337
THEOREM 5 : There exists an optimal basic solution to problem MINPL-2 for which the slack variables in (30) and (31a) are nonbasic.
PROOF: Suppose an optimal basic solution of MINPL-2 includes slack basic variables. Then, at least one of the slack variables of the surplus fuel inequality (31a) andlor the empty capacity inequalities (30) are positive. Assume that a slack variable of (31a) measuring the amount of unburnt fuel in the kth vehicle tank upon returning to the origin is a basic positive variable. Under this assumption, it is feasible to shift the point where k transfers fuel to k + 1 backwards [if the tank of the (k + 1)st vehicle is empty in the refueling point] or forwards (otherwise), in order to increase the amount of fuel that the (k + 1)st vehicle is able to transfer fuel to the (k + 2)st vehicle at the (k + 1)st refueling point. Repeating this argument successively an “improved” solution increasing the total range can be achieved. Technical details are similar to the above if the slack to (30) is assumed positive. Q.E.D.
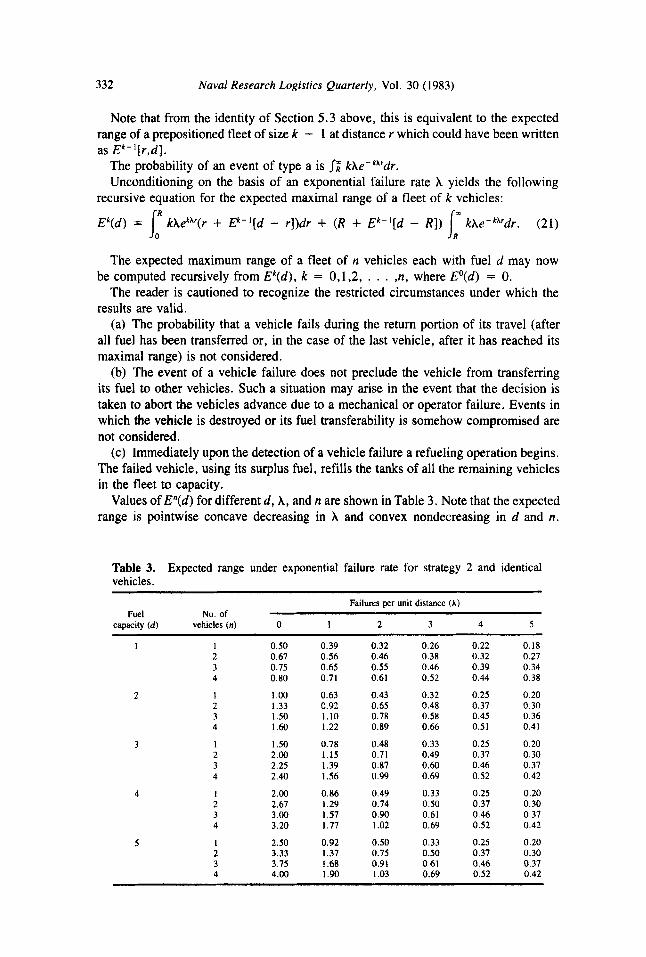
In order to demonstrate that there is no simple ordering rule to Problem MINPL-2, consider the simple case where n = 2. There are two possible vehicle orders in the refueling chain: vehicle 1 before vehicle 2 [1,2] or vice versa [2,1]. The feasibility conditions for these cases are
r, 5 rq + 1 for [2,1], (38)
where by definition:
r, = k21kl, rq = g,/q,.
For every rk > 0 and rq 2 0 at least one of the feasibility conditions (37) or (38) is satisfied. When r, > 2r, + 1, the order [1,2] is optimal. When rt < rq/(2 + rq) the opposite order is optimal. Thus, the ordering rule is not simple.
In Table 4 several examples are solved for the case n = 2 with various combinations of fuel capacity and consumption. As seen from the table there exist several cases in which it is preferable to send a single vehicle in lieu of two vehicles with a given refueling order. However, there always exists a two-vehicle optimal ordering which gives a range higher than a single vehicle. The percent range increase over a single vehicle depends on the relative fuel consumptions and capacities of the vehicles. In one of the examples it was possible to increase the range by 45%.
9. MAXIMIZING OPERATIONAL RANGE UNDER A BUDGET CONSTRAINT
The problem of maximizing the operational range of a sequential refueling chain under a budget constraint may arise when the fleet purchase or rental budget is fixed. The problem is analyzed under the assumption of vehicles with different fuel capacities and identical fuel consumption rates (di = k,/q). To demonstrate the economic struc- ture of this problem it is assumed (for simplicity) that the vehicle cost F is a differ- entiable, strictly monotone increasing function, of its capacity d.

W
W
m
Tabl
e 4.
D
iffer
ent c
ombi
natio
ns o
f fu
el c
apac
ity a
nd c
onsu
mpt
ion
for t
wo
vehi
cles
.
Max
. ra
nge
Ran
ge
of s
ingl
e in
crea
se
3 Pr
oble
m"
ki 91
k2 92
R
ange
R
l UI
Rz
Slac
ks
vehi
cle
(%b) h b
p O
rder
[ 1,
2]
25
2 1.
1 10
0 1
200
2 62
.5
25.0
50
.0
37.5
0
50
2.1
100
1 50
0 2
137S
b 25
.0
50.0
11
2.5
0 12
5 10
" 3-
50.0
23
7.5
0 25
0 Sb
c
3.1
100
1 lo
00
2 26
2Sb
25.0
00
. 4.
1 10
0 1
200
5 27
.1
14.3
71
.4
12.9
0
50
2. 2 5.
1 10
0 1
500
5 57
.1
14.3
71
.4
42.9
0
50
14
M
6.1
100
1 lo
00
5 10
7.1b
14
.3
71.4
92
.9
0 10
0 14
b
-
k2 92
kl 91
Ord
er [
2,1]
1.
2 20
0 2
100
1 70
.0"
40.0
40
.0
30.0
0
2.2
500
2 10
0 1
100.
0 10
0.0
100.
0 0
0 3.
2 lo
00
2 10
0 1
100.
0 10
0.0
100.
0 0
+ 4.
2 20
0 5
100
1 59
. lb
18
.2
18.2
40
.9
0 5.
2 50
0 5
100
1 72
. gb
45.5
45
.5
27.3
0
6.2
lo00
5
100
1 94
.5
90.0
90
.0
4.5
0
50
4ob
125
-
250
-
50
I 8b
50
4Sb
100
-
h
+
W
W
W
~~
"Pro
blem
X.2
is
the
oppo
site
ord
er o
f Pr
oble
m X
. 1.
Qpt
imal
ord
er f
or th
e co
mbi
natio
n.

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 339
The maximal range capacity cost problem, for a given budget C, is given below:
1 -dk minimize z = - -
2 k = l 3”-k1
subject to 2 F(dd 5 C, k - 1
where d,, 1 d,,-l 2 * * 2 dl 2 0 and F(0) = 0.
(39)
We note that problem (39)-(40) is framed as a regular problem of minimizing pro- duction cost for a given output level (see [8]). A necessary (see Slater’s constraint‘ qualification in [6 ] ) and a sufficient [9] condition for a given pseudoconvex function F and a vector d” = (4, . . . ,d;) to be optimal is that it satisfies the Kuhn-Tucker conditions of (39) and (40). Assume that F is a pseudoconvex function and that d” is an interior solution. Thus, d” is given implicitly by
aF/ a 4 - k = 1 , . . . ,n, 1 A 1/(2 * 3”-k)’ _ -
Equation (41) states that at the optimum the marginal productivity of the last dollar (l/A) must be equal to the ratio of the marginal cost and the marginal productivity for each vehicle with dk. It is well known that A = aZ*/aC > 0, where Z* is the value of the optimal solution. A result which is not intuitively obvious is the one concerned with the sign of a2Z*/aC2, i.e., the slope of the marginal productivity curve. Verifying Samuelson [8, p. 671 we note that for strictly convex F, the sign of a2Z*/ aC2 is negative for odd n and positive for even n.
EXAMPLE
s > 1 . The optimal range is evaluated as follows: To illustrate the nature of the solution of (39)-(40) assume that F(d) = ads, where
sI(s-1) I/(s-l)
2 i = l k = I a k = l Z* = A{?[ ($) (n/ 2 1/3n-kdi-1) ] + (G - 2 d;)’”}. (43)
For example, if s = 2, a = 1 , n = 2, (41) and (42) imply:
d2 = 3d1, dl = C/lO.
Inserting these values into (43) yields:
Z* = 1 . 0 5 4 ~ .
Thus, for this example, the total range increases with the square root of the budget.

340 Naval Research Logistics Quarterly, Vol. 30 (1983)
10. CONCLUSION AND FUTURE EXTENSIONS
In this article several simple structures for the maximal operational fleet refueling problem is investigated. For these structures simple ordering rules for a pure refueling chain which assure range maximization of a “1-out-of-n” system are determined. The exception is for vehicles with both different fuel capacities and consumption rates in which no simple ordering rule exists. In the “I-out-of-n” system studied here it is desired to maximize the range Z of one of the vehicles from a fleet of size n. It is easy to evaluate the dual to this problem, i.e., find the minimum fleet size n such that a single vehicle reaches a fixed distance Z from the origin. Work is to be done on a “k-out-of-n” system in which a fixed number of k vehicles (k < n) are to all simul- taneously reach their maximal distances before returning to the origin. The analogous dual to this problem is to find the minimum fleet size n such that k vehicles can be placed a distance Z away from the origin or alternatively, given a fleet size n, maximize k-the number of vehicles able to reach a distance Z from the origin.
An anonymous referee has indicated that a variation of this last problem is of some importance. This class of problems involves a mixed fleet comprised of two types of vehicles: kl tanker-type vehicles capable of refueling themselves and other vehicles and k2 nontanker vehicles incapable of refueling. The two types of vehicles naturally have different fuel capacities as well as different fuel consumption rates-a config- uration touched on in Section 8. The problem may be posed as follows: Given kl tankers, maximize k2, the number of nontankers that can reach a given location with a specified amount of remaining fuel beyond that required for the return trip home. Alternatively, one may find the minimum number of tankers such that k2 nontankers are placed in the proper position with the required amount of remaining fuel. This topic as well as more realistic stochastic and geographical situations will be developed in a future article. For example, the investigation of geographical restrictions such as different origin and destination bases not in a direct line of sight.
APPENDIX
To find B-I by Gauss elimination denote by A the rows of B-I and by e the rows of the identity matrix IZn - I .
, k = 3,4, . . . ,n - 1. (Al) -
+ e2(t-i)-3 e2(k-i- I )
3

Mehrez, Stem, and Ronen: Vehicle Fleet Refueling Strategies 34 1
The first two odd-numbered rows and the last row have different forms.
1 3
A l = - (el - e2),
To calculate C,$ - I let
C,B-’ = Al + A, + As + * - * + A2,- l . (A3)
Inserting (A2) into (A3) yields:
From the identity matrix:
e2n - I
2
Using (Al) calculate A2n-2/2.
2 1 2 ’ ’ ’ ’32’ 32’ 3 ’ 3’
Therefore,
REFERENCES
[ 11 Avi-Itzhak, B., “Speed, Fuel Consumption and Output of Ships: Some Quantitative Eco- nomical and National Implications of the Oil Crises,” Israel Shipping Research Institute, February 1974.
[2] Bracken, J . , and Longhill, J. D., “Note on a Model for Minimizing Cost of Aerial Tanker Support of a Practice Bomber Mission,” Naval Research Logistics Quarterly, 11, 359-364 (1964).
[3] Collins, F. I., and Guthrie, D., “A Model for the Analysis of AEW and CAP Aircraft Availability,” Naval Research Logistics Quarterly, 10, 73-79 (1963).
[4] Etschmaier, M. M., “Airline Fuel Optimization Models,” paper presented at the ORSA/ TIMS Meeting, Washington, DC, May 5-7, 1980.

342 Naval Research Logistics Quarterly, Vol. 30 (1983)
[51
[71 [61
Leitman, G. , Ed., Optimization Techniques, Academic, New York, 1962. Mangasarian, 0. L . , Nonlinear Programming, McGraw-Hill, New York, 1969, p. 78. Neustadt, W. N. , “Optimization, A Moment Problem, and Nonlinear Programming,” Journal of SIAM Control, Ser. A . , 2( l ) , 33-53 (1964). Samuelson, P. A. , Foundations of Economic Analysis, Harvard Economic Studies, Harvard U . P., Cambridge, MA, 1966, Vol. 80.
[9] Zangwill, W. I . , Nonlinear Programming, Prentice-Hall, Englewood Cliffs, NJ, 1969, p. 43.