Embed Size (px)
Citation preview

Vermelding onderdeel organisatie
1
Recent Developments in Passive Dynamic Walking Robots
Seminar
May 13, 2005 University of Nottingham, UK
Laboratory for Engineering MechanicsFaculty of Mechanical Engineering
Arend L. SchwabGoogle: Arend Schwab [I’m Feeling Lucky]

May 13, 2005 2
Acknowledgement
TUdelft:Martijn WisseJan van FrankenhuyzenRichard van der LindeFrans van der HelmJaap Meijaard… MSc students
Cornell University:Andy RuinaMariano Garcia
Mike Coleman
Insitu Group: Tad Mc Geer
Collins, S., Ruina, A., Tedrake, R. and Wisse, M., 2005. ``Efficient Bipeal Robots Based on Passive-Dynamic Walkers’’, Science 307: 1082-1085

May 13, 2005 3
Contents
• Passive Dynamic Walkers• Passive Dynamic Robots• The Simplest Walker• Cyclic Motion; Stability & Basin of Attraction• Stability: Fore-Aft and Sideways• Conclusions

May 13, 2005 4
Walking Robots
-Anthropomorphic Design-Energy Efficient Ct=(energy used)/(weight*distance)=0.2
Museon 2001 Mike 2002 Max 2003 Denise 2004
Stappo 1995 Bob 2000 Baps 2001

May 13, 2005 5
Passive Dynamic Walking
Wire Walker by G. T. Fallis Patented in 1888.
Wire Walker, Model 2002

May 13, 2005 6
Simplest Walking Model
Scaling with: M, l and g and limit case: m/M -> 0
Leaves one free parameter:
May 13, 2005 7
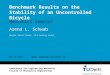
Walking Motion
Walking Motion in Phase Plane
nn
1
Cyclic Motion if

May 13, 2005 8
Family of Stable Cyclic Solutions
Stability of Cyclic Motion Determined by Characteristic Multipliers ||<1 But How Stable?

May 13, 2005 9
Basin of Attraction of Cyclic Motion
Cyclic Motion (Fixed Point) : )1561.0,1534.0(),(
Poincare Section
with basin of Attractionand failure modes:-falling Forward-falling Backward-Running

May 13, 2005 10
Basin of Attraction (Cont’d)
Basin of Attraction: askew & enlarged

May 13, 2005 11
A few steps into the Basin of Attraction
x = Cyclic Motion
1 = Start
May 13, 2005 12
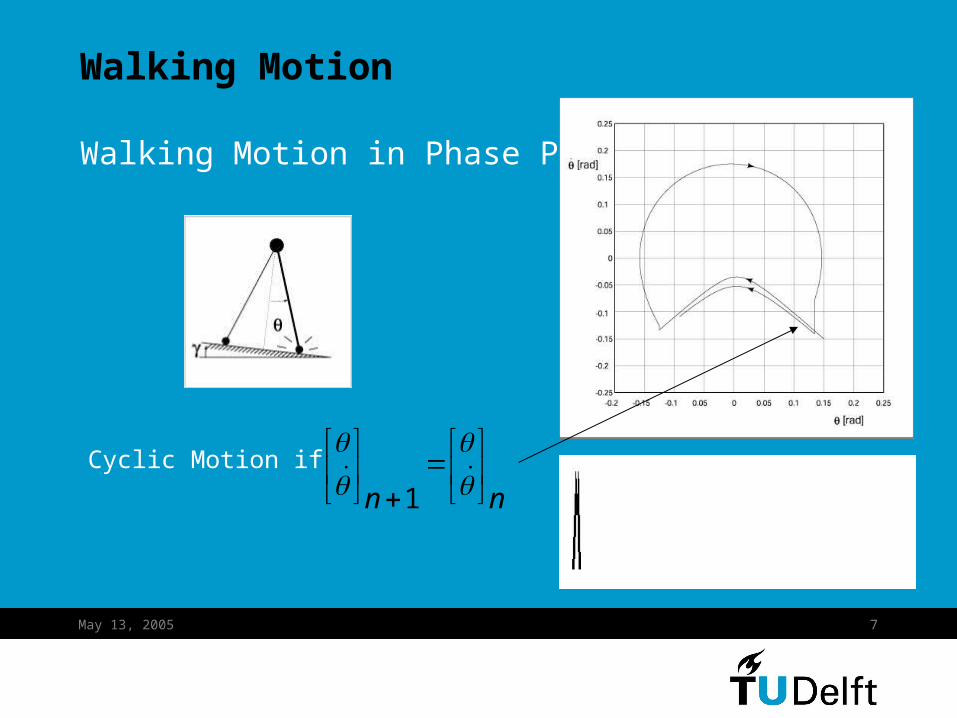
Effect of the Slope on the BOA

May 13, 2005 13
Simplest Walking Robot
Simplest Walker (1999): 2D, straight legs and point feetwalking down a shallow slope.(copy of the 1988 Tad McGeer walker)

May 13, 2005 14
Bob: a Bipedal Robot based on Simulations
Bob (2000): 3D, Flat Feet, Knees and Ankle Actuation
May 13, 2005 15
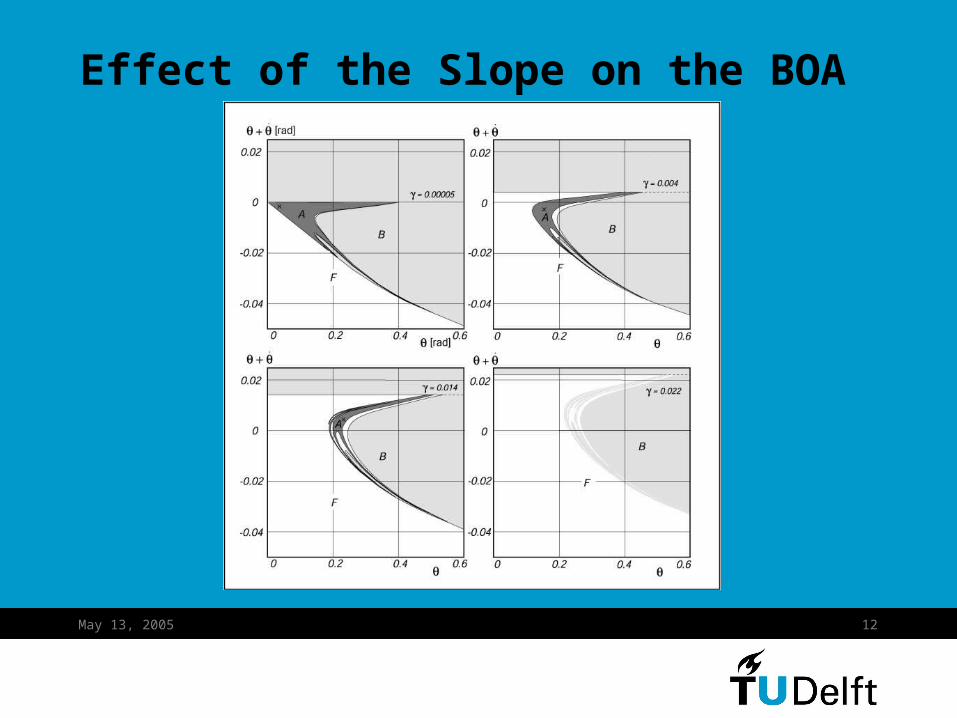
Robot with Knees, Round Feet, and Actuation
Mike (2002)

May 13, 2005 16
For-Aft Stability or How to Keep from Falling ForwardSwing Leg Control:’’You will never fall forward if you put your swing leg fast enough
in front of your stance leg’’
Uncontrolled Swing Leg Control

May 13, 2005 17
Adding an Upper Body
Max (2003) Bisecting Hip Mechanism

May 13, 2005 18
Adding an Upper Body
Max 2003 On Level Ground Self-Starting

May 13, 2005 19
Going into 3D
Sideway Stability by means of Lean-to-yaw Coupling
As in a Skateboard:
Velocity dependent Stability

May 13, 2005 20
Going into 3D
Sideway Stability by means of Lean-to-yaw Coupling
Or as in a Bicycle:
Velocity dependent Stability
May 13, 2005 21
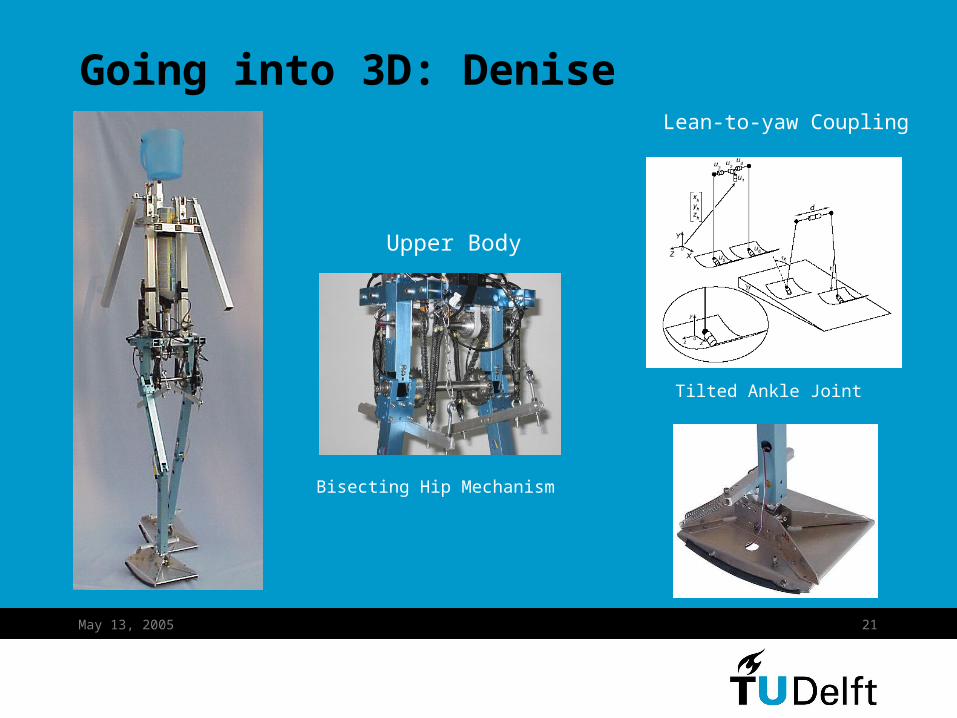
Going into 3D: Denise
Bisecting Hip Mechanism
Tilted Ankle Joint
Lean-to-yaw Coupling
Upper Body

May 13, 2005 22
Going into 3D: Denise

May 13, 2005 23
Conclusions
Passive Dynamic Robots:
- use less control and less energy - walk more naturally.- help understand human walking.