Embed Size (px)
Citation preview

2016 International Conference on Materials, Manufacturing and Mechanical Engineering (MMME 2016) ISBN: 978-1-60595-413-4
Vertical Vibration Simulation Analysis of In-wheel Motor Electric Vehicle Suspension
Pei-cheng SHI, Pei-lei SHI, Qi ZHAO and Suo WANG Anhui Polytechnic University, Anhui Engineering Technology Research Center of
Automotive New technique, Wuhu, Anhui, China 241000
Keywords: Electric vehicle, In-wheel drive, Suspension, Vibration.
Abstract. To analyze the vertical vibration characteristics of in-wheel motor electric vehicle suspension, through MATLAB/ Simulink for simulation and analysis, a vertical kinetic model of 1/4 vehicle is built. Without changing the original premise of vehicle suspension parameters, vehicle vertical vibration acceleration of in-wheel motor as unsprung mass and wheel dynamic load are in turn to be simulated, to study the influence of the increase of the unsprung mass on the vertical vibration of the suspension because of the introduction of in-wheel motor. The research results provide a reference for improving the NVH characteristics of in-wheel motor electric vehicle.
Introduction
Recently years, in-wheel-motor electric vehicle (driven by two or four electric wheels) has drawn much attention from the automobile industry both home and abroad for its unique advantages in compact structure and efficiency of power transmission [1-2]. In the in-wheel-motor electric vehicle, the motor are put in the wheel hub, the motor integrated with the wheels, and the wheels driven by the motor directly. It saves the engine, clutch, gearbox, drive shaft, the main reducer and differential gearbox, drive shaft and differential transmission system.
However, there are some controversial challenges of in-wheel motor in practical engineering [3-4]. Firstly, the combination of motor and hub will increase the unsprung mass of vehicle, which adversely affects the vehicle’s riding performance and riding comfort. Secondly, the motor is easily impacted by road as it is directly fixed on wheel, which may intensify the magnetic gap fluctuation between stator and rotor as well as reduce the service life of motor. Thirdly, the torque ripple of motor affects wheel directly, which will lead to the sympathetic vibration of the front and back of suspension and the vibration of the whole drive system. Therefore, it is of great significance to study the influence of in-wheel motor on the vertical vibration of the suspension caused by the increase of the unsprung mass.
Vertical Kinetic Model of In-wheel- motor Electric Vehicle
The Establishment of the Simplified Vertical Vibration Model of 1/4 Vehicle
The kinetic model of in-wheel-motor electric vehicle is composed of vehicle suspension model and in-wheel motor of unsprung mass. The simplified vertical vibration model of 1/4 vehicle with in-wheel motor is shown in Figure 1.
2m
1m 3m
1k
2k
1c
2c
rz
1z
2z
eF
Figure 1. 1/4 vehicle vertical vibration model of in-wheel-motor electric vehicle.
234

According to Figure 1, the 1/4 vehicle vertical vibration dynamic equation is
=0 (1)
=0 (2)
(3)
= + (4) Among it, m1 is unsprung mass (excluding the mass of wheel motor); m2 is sprung mass; m3 is the in-wheel motor mass; k1 is stiffness of tire and c1 is damping of tire; k2 is stiffness of vehicle suspension and c2 is damping of vehicle suspension; y0 is road surface roughness, y1 is wheel and y2 is body displacement; Ft is the fluctuation of tire ground force; Fn is the exciting force (vibration input) of the sprung mass m2. The parameter values of the 1/4 vehicle vertical vibration model is in Table 1.
Table 1. The parameter of the 1/4 vehicle vertical vibration model.
Vehicle parameter Initial value Unsprung mass m1 (kg) 25
Sprung mass m2 (kg) 200
In-wheel motor mass m3 (kg) 20
Stiffness of tire k1 (N/m) 190000
Damping of tire c1 (N/(m/s)) 400
Stiffness of suspension k2(N/m) 18000
Damping of suspension c2 (N/(m/s)) 1600
Stochastic Input Simulation Model for Road
In the International Road Roughness Test [5], the roughness of the road is defined as the deviation of the road from the ideal plane along the running direction of the vehicle. The power spectral density function of road can represent the distribution of road roughness energy in the spatial frequency domain, using the following formula as the fitting expression:
(8)
Figure 2. SIMULINK simulation model of Class-B road spectrum.
In this formula: is spatial frequency(m-1), the reciprocal of the wavelength λ ; is reference
spatial frequency, =0.1m-1; Gq(n0) is the road power spectral density at the reference spatial
00
W
q qn
G n G nn
n 0n
0n
235
frequency and called the road roughness coefficient. Its value depends on the road grade; W is the
frequency index, the frequency of the slope of the double logarithmic coordinates, which determines the frequency structure of the road power density.
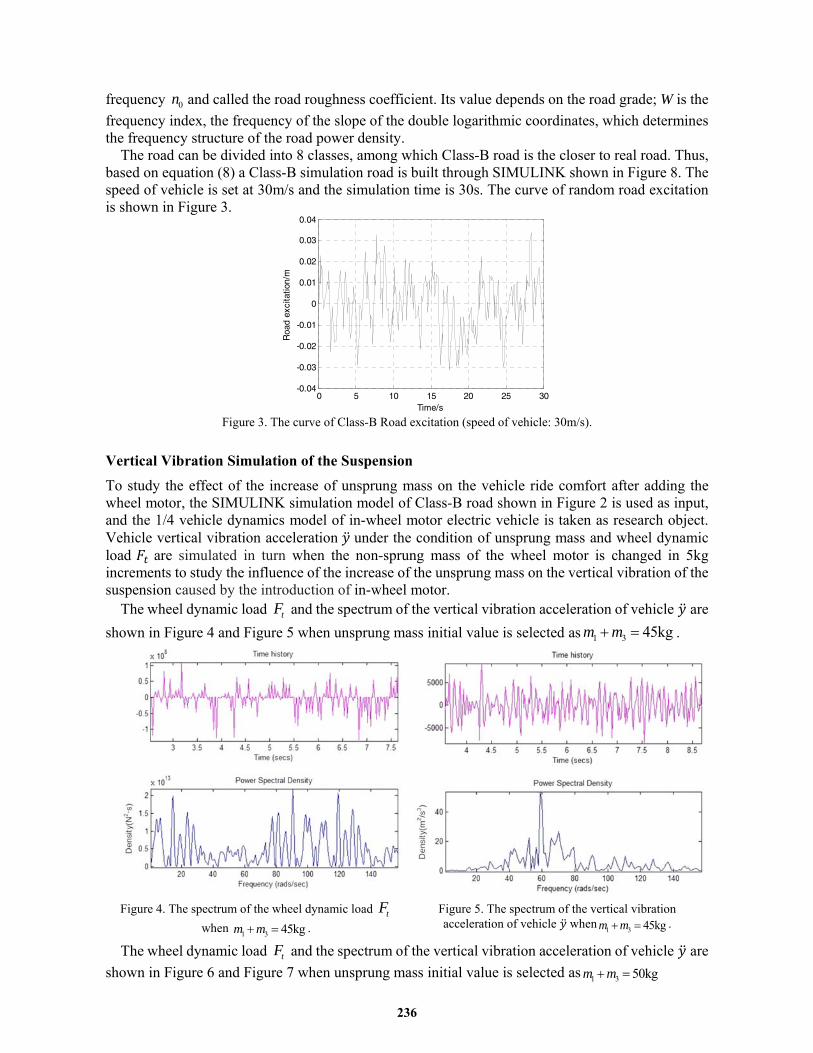
The road can be divided into 8 classes, among which Class-B road is the closer to real road. Thus, based on equation (8) a Class-B simulation road is built through SIMULINK shown in Figure 8. The speed of vehicle is set at 30m/s and the simulation time is 30s. The curve of random road excitation is shown in Figure 3.
Figure 3. The curve of Class-B Road excitation (speed of vehicle: 30m/s).
Vertical Vibration Simulation of the Suspension
To study the effect of the increase of unsprung mass on the vehicle ride comfort after adding the wheel motor, the SIMULINK simulation model of Class-B road shown in Figure 2 is used as input, and the 1/4 vehicle dynamics model of in-wheel motor electric vehicle is taken as research object. Vehicle vertical vibration acceleration under the condition of unsprung mass and wheel dynamic load are simulated in turn when the non-sprung mass of the wheel motor is changed in 5kg increments to study the influence of the increase of the unsprung mass on the vertical vibration of the suspension caused by the introduction of in-wheel motor.
The wheel dynamic load tF and the spectrum of the vertical vibration acceleration of vehicle are
shown in Figure 4 and Figure 5 when unsprung mass initial value is selected as 1 3 45kgm m .
Figure 4. The spectrum of the wheel dynamic load tF
when 1 3 45kgm m .
Figure 5. The spectrum of the vertical vibration acceleration of vehicle when
1 3 45kgm m .
The wheel dynamic load tF and the spectrum of the vertical vibration acceleration of vehicle are
shown in Figure 6 and Figure 7 when unsprung mass initial value is selected as 1 3 50kgm m
0n
0 5 10 15 20 25 30-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Time/s
Roa
d ex
cita
tion/
m
236
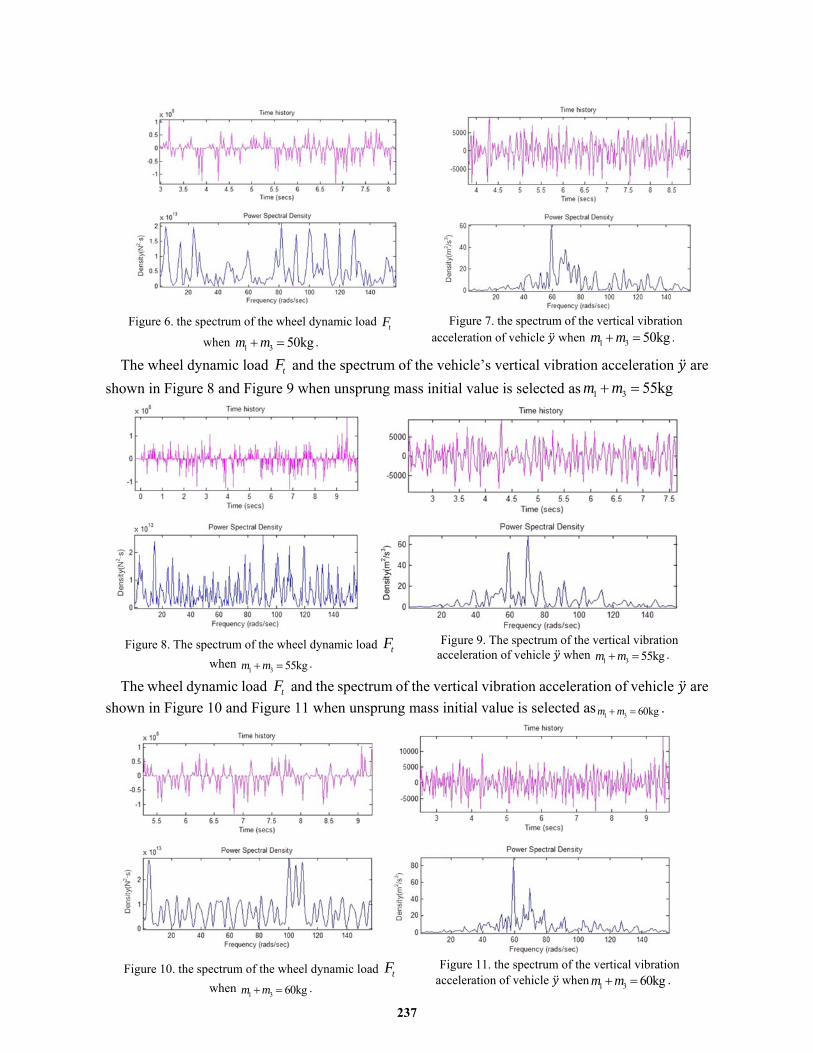
Figure 6. the spectrum of the wheel dynamic load tF
when 1 3 50kgm m .
Figure 7. the spectrum of the vertical vibration acceleration of vehicle when 1 3 50kgm m .
The wheel dynamic load tF and the spectrum of the vehicle’s vertical vibration acceleration are
shown in Figure 8 and Figure 9 when unsprung mass initial value is selected as 1 3 55kgm m
Figure 8. The spectrum of the wheel dynamic load tF
when 1 3 55kgm m .
Figure 9. The spectrum of the vertical vibration acceleration of vehicle when
1 3 55kgm m .
The wheel dynamic load tF and the spectrum of the vertical vibration acceleration of vehicle are
shown in Figure 10 and Figure 11 when unsprung mass initial value is selected as1 3 60kgm m .
Figure 10. the spectrum of the wheel dynamic load tF
when 1 3 60kgm m .
Figure 11. the spectrum of the vertical vibration acceleration of vehicle when 1 3 60kgm m .
237
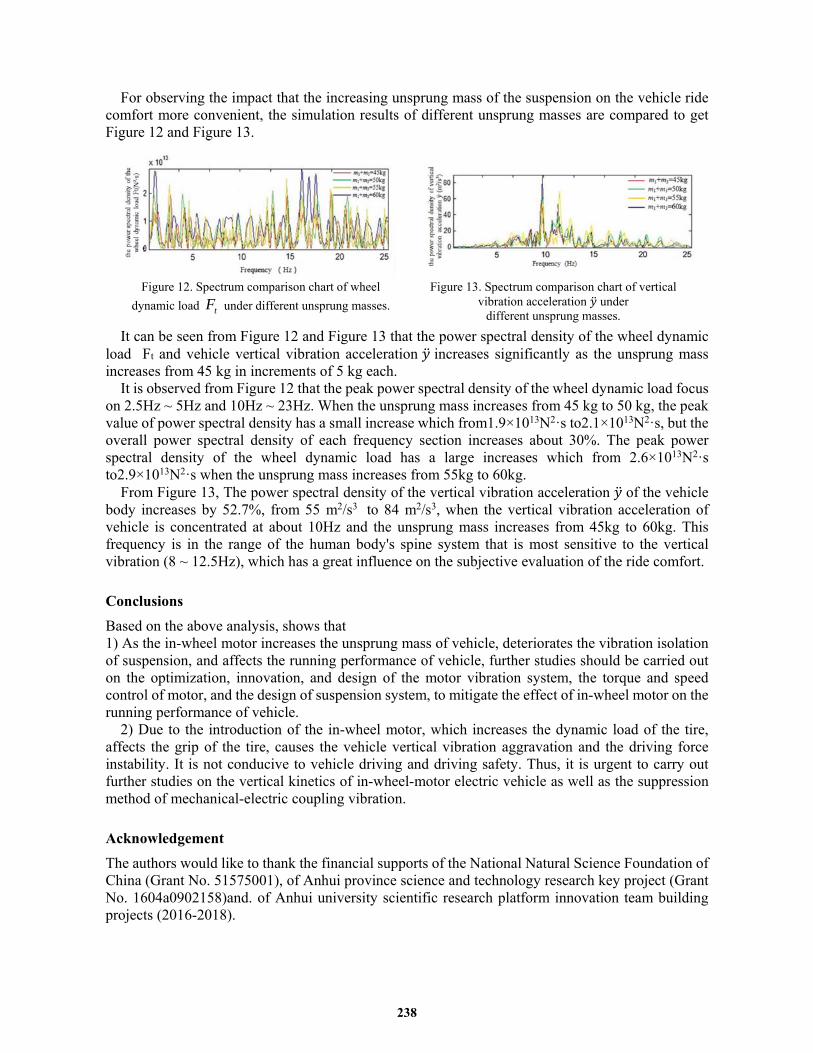
For observing the impact that the increasing unsprung mass of the suspension on the vehicle ride comfort more convenient, the simulation results of different unsprung masses are compared to get Figure 12 and Figure 13.
Figure 12. Spectrum comparison chart of wheel
dynamic load tF under different unsprung masses.
Figure 13. Spectrum comparison chart of vertical vibration acceleration under
different unsprung masses.
It can be seen from Figure 12 and Figure 13 that the power spectral density of the wheel dynamic load Ft and vehicle vertical vibration acceleration increases significantly as the unsprung mass increases from 45 kg in increments of 5 kg each.
It is observed from Figure 12 that the peak power spectral density of the wheel dynamic load focus on 2.5Hz ~ 5Hz and 10Hz ~ 23Hz. When the unsprung mass increases from 45 kg to 50 kg, the peak value of power spectral density has a small increase which from1.9×1013N2·s to2.1×1013N2·s, but the overall power spectral density of each frequency section increases about 30%. The peak power spectral density of the wheel dynamic load has a large increases which from 2.6×1013N2·s to2.9×1013N2·s when the unsprung mass increases from 55kg to 60kg.
From Figure 13, The power spectral density of the vertical vibration acceleration of the vehicle body increases by 52.7%, from 55 m2/s3 to 84 m2/s3, when the vertical vibration acceleration of vehicle is concentrated at about 10Hz and the unsprung mass increases from 45kg to 60kg. This frequency is in the range of the human body's spine system that is most sensitive to the vertical vibration (8 ~ 12.5Hz), which has a great influence on the subjective evaluation of the ride comfort.
Conclusions
Based on the above analysis, shows that 1) As the in-wheel motor increases the unsprung mass of vehicle, deteriorates the vibration isolation of suspension, and affects the running performance of vehicle, further studies should be carried out on the optimization, innovation, and design of the motor vibration system, the torque and speed control of motor, and the design of suspension system, to mitigate the effect of in-wheel motor on the running performance of vehicle.
2) Due to the introduction of the in-wheel motor, which increases the dynamic load of the tire, affects the grip of the tire, causes the vehicle vertical vibration aggravation and the driving force instability. It is not conducive to vehicle driving and driving safety. Thus, it is urgent to carry out further studies on the vertical kinetics of in-wheel-motor electric vehicle as well as the suppression method of mechanical-electric coupling vibration.
Acknowledgement
The authors would like to thank the financial supports of the National Natural Science Foundation of China (Grant No. 51575001), of Anhui province science and technology research key project (Grant No. 1604a0902158)and. of Anhui university scientific research platform innovation team building projects (2016-2018).
238

References
[1] Li Gang, Zong Chang-fu. Review on Electric Vehicle with Four-wheel Independent Drive In-wheel Motors [J]. Journal of Liaoning University of Technology (Natural Science Edition), 2014, 34(2): 47-52.(In Chinese)
[2] Meng Qinghua, Xu Jin, Wang Dongfeng. Power System of Electric Vehicle Driven by In-wheel Motors [J]. Transactions of the Chinese Society of Agricultural Machinery, 2013,44(8): 33-37.(In Chinese)
[3] Tong Wei, Hou Zhichao. Analyses on the Vertical Characteristics and Motor Vibration of an Electric Vehicle with Motor-in-Wheel Drive [J]. Automotive Engineering, 2014, 3(4): 398-403.(In Chinese)
[4] Wei Sun, Yinong Li, Jingying Huang, Nong Zhang. Vibration effect and control of In-Wheel Switched Reluctance Motor for electric vehicle [J]. Journal of Sound and Vibration, 338(2015)105–120.
[5] Du Feng, Ge Xiaocheng, Chen Xiang, Ding Jinquan. Conversion of Spatial Power Spectral Density and Study on Road Irregularity Modeling Theory [J]. Journal of Vibration, Measurement & Diagnosis, 2015, 35(5): 981-986. (In Chinese)
[6] Chen Y, Wang J. Design and evaluation on electric differentials for overactuated electric ground vehicles with four independent in-wheel motors [J]. IEEE Trans Veh Technol 2012; 61(4): 1534–1542.
[7] Luo Y, Tan D. Study on the dynamics of the in-wheel motor system [J]. IEEE Trans Veh Technol 2012; 61(8): 3510–3518.
[8] Liu Mingchun, Zhang Chengning, Wang Zhifu. Dynamics Modeling and Simulation on Four-Axle Vehicle Driven by In-Wheel Motors [J]. Journal of Beijing Institute of Technology, 2014, 34(2): 143-1472014. (In Chinese)
[9] Xiong Lu, Chen Chen, Feng Yuan. Modeling of Distributed Drive Electric Vehicle Based on Co-simulation of Carsim/Simulink [J]. Journal of System Simulation, 2014, 26(5): 1143-1148. (In Chinese)
239





























