Embed Size (px)
Citation preview
© 2
016
Mer
cury
Mar
ine
Vess
elVi
ew 5
02 e
702
8M01
2237
0 6
16po
r

90-8M0122370 por JUNHO 2016 Página i
ÍNDICE
Seção 1 - Introdução
Declaração de Conformidade................................................. 2VesselView 502................................................................ 2Relatórios de Testes......................................................... 2Instituição Notificada envolvida.........................................2VesselView 702................................................................ 2Relatórios de Testes......................................................... 3Instituição Notificada envolvida.........................................3
Visão geral do VesselView..................................................... 3Localizações e descrições do monitor da tela doVesselView....................................................................... 4Controles Dianteiros do VesselView 502.......................... 5Operações do Controle Dianteiro do VesselView 502...... 5Conexões do Painel Traseiro do VesselView 502............ 5Controles Dianteiros do VesselView 702.......................... 6Operações do Controle Dianteiro do VesselView 702...... 6Conexões do Painel Traseiro do VesselView 702............ 6
Visão geral do VesselView Link..............................................7Ligações do VesselView Link........................................... 7
Tela de Navegação Segura.................................................... 8Como atualizar seu Software VesselView.............................. 8
Consulta automática de Wi‑Fi........................................... 8Usar o cartão micro SD.....................................................8Obtenção do software mais recente............................... 11
Como atualizar seu software do módulo VesselView Link... 12Criar Capturas de tela...........................................................16Menus que não são da Mercury Marine............................... 19Calibragem da Tela sensível ao toque................................. 20Inicialização.......................................................................... 22Manutenção programada do motor...................................... 23Manutenção do dispositivo................................................... 25
Limpeza da tela do monitor.............................................25Limpeza da porta média................................................. 25
Seção 2 - Telas Iniciais e Assistente de Configuração
Tela de Consulta para Inicialização do VesselView............. 28Tela inicial............................................................................. 28Assistente de configuração...................................................29
Importar Configuração.................................................... 31Configuração do Motor................................................... 31Configuração do Mostrador............................................ 34Configuração do Dispositivo........................................... 35Configuração das unidades............................................ 35
Configuração do Tanque................................................ 35Configuração da velocidade........................................... 37Conclusão do assistente de configuração...................... 38
Configuração da origem de dados........................................38Fontes de Dados.............................................................38
Ampliação das Telas de Dados............................................ 40Barra de Instrumento............................................................ 42
Seção 3 - Recursos e Operação do piloto automático
Modo Econômico.................................................................. 48ECO............................................................................... 48
Modo SmartTow................................................................... 51Smart Tow (Reboque inteligente).................................. 51
Características.......................................................... 51Desativar o Smart Tow.............................................. 54
Modo de Controle de Cruzeiro..............................................54Controle Cruise (Cruzeiro).............................................54
Ativação do modo de controle de cruzeiro................ 54Modo de Controle de Marcha Lenta de Pesca..................... 56
Controle de marcha lenta pesca....................................56
Seção 4 - Configuração e Calibragens
Configurações do Sistema....................................................62Navegação no Menu Configurações............................. 62Localizações do Leme e do dispositivo......................... 62Assistente de configuração........................................... 63Simulação...................................................................... 63
Configurações do Barco....................................................... 63Guias............................................................................. 63Tanques.........................................................................65Velocidade..................................................................... 66Direção.......................................................................... 70Controle do Barco..........................................................71Câmeras instaladas....................................................... 72Conjunto de gerador Ativado......................................... 73Notificação de Manutenção........................................... 73
Temperatura do mar...................................................... 74Configurações dos Motores.................................................. 74
Motores Mostrados........................................................ 74Modelo do Motor............................................................75Limites........................................................................... 76Dados suportados......................................................... 77Modo ECO..................................................................... 78Tipo de Cruzeiro/Smart Tow..........................................79Compensador................................................................ 79
Alarmes.................................................................................80Configuração dos Alarmes............................................ 80
Arquivo de identidade........................................................... 81Exportar......................................................................... 81Importar......................................................................... 82

Página ii 90-8M0122370 por JUNHO 2016
Seção 5 - Alarmes de advertência
Advertências—Falhas e alarmes........................................ 86 Águas Rasas e Alarmes de Combustível Baixo...... 88

Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 1
Seção 1 - IntroduçãoÍndiceDeclaração de Conformidade............................................. 2
VesselView 502 ........................................................... 2Relatórios de Testes ................................................... 2Instituição Notificada envolvida ................................... 2VesselView 702 ........................................................... 2Relatórios de Testes ................................................... 3Instituição Notificada envolvida ................................... 3
Visão geral do VesselView.................................................. 3Localizações e descrições do monitor da tela doVesselView .................................................................. 4Controles Dianteiros do VesselView 502 .................... 5Operações do Controle Dianteiro do VesselView 502.................................................................................... 5Conexões do Painel Traseiro do VesselView 502 ...... 5Controles Dianteiros do VesselView 702 .................... 6Operações do Controle Dianteiro do VesselView 702.................................................................................... 6Conexões do Painel Traseiro do VesselView 702 ...... 6
Visão geral do VesselView Link.......................................... 7Ligações do VesselView Link ...................................... 7
Tela de Navegação Segura................................................ 8Como atualizar seu Software VesselView.......................... 8
Consulta automática de Wi‑Fi ..................................... 8Usar o cartão micro SD ............................................... 8Obtenção do software mais recente ......................... 11
Como atualizar seu software do módulo VesselView Link.......................................................................................... 12Criar Capturas de tela....................................................... 16Menus que não são da Mercury Marine............................ 19Calibragem da Tela sensível ao toque.............................. 20Inicialização....................................................................... 22Manutenção programada do motor................................... 23Manutenção do dispositivo................................................ 25
Limpeza da tela do monitor ....................................... 25Limpeza da porta média ............................................ 25
1
Seção 1 - Introdução
Página 2 90-8M0122370 por JUNHO 2016
Declaração de ConformidadeVesselView 502
A Mercury Marine declara que o seguinte produto ao qual se refere esta declaração está em conformidade com osrequisitos da diretriz da UE 1999/5/EC R&TTE (Equipamentos Terminais de Rádio e Telecomunicações) e satisfaz todosos regulamentos técnicos aplicáveis.A avaliação foi efetuada de acordo com o Anexo IV da diretriz acima.
Produto Mercury Marine VesselView 502
Este produto foi testado com as seguintes normas.
Padrão Descrição
EN 60950-1:2006 Equipamentos de tecnologia da informação - Segurança - Parte 1: Requisitos gerais que cobrem as exigências essenciais do artigo3.1 (a) da Diretriz R&TTE
IEC 60945:2002 Equipamentos e sistemas de navegação e radiocomunicação marítimas - requisitos gerais - métodos de ensaio e resultadosrequeridos. Cobrindo as exigências essenciais do artigo 3.1(b) da Diretriz R&TTE.
EN 301 489-1 V1.9.2 Compatibilidade eletromagnética e tópicos de espectro de rádio (ERM); Norma de compatibilidade eletromagnética paraequipamentos de rádio e serviços; Parte 1: Requisitos técnicos comuns [artigo 3(1)(b) RTTE].
EN 300 328 V1.9.1Compatibilidade eletromagnética e tópicos de espectro de rádio (ERM); Sistemas de transmissão de banda larga; Equipamento detransmissão de dados operando na faixa de 2,4 GHz ISM e utilizando técnicas de modulação de banda larga; EN harmonizadacobrindo os requisitos essenciais no âmbito do artigo 3.2 da Diretriz R&TTE.
EN 300 440-2 V1.4.1Compatibilidade eletromagnética e tópicos de espectro de rádio (ERM); Equipamento de curto alcance; Equipamento de rádio paraser utilizado na faixa de frequência de 1 GHz a 40 GHz; Parte 2: EN harmonizada cobrindo os requisitos essenciais do artigo 3.2 daDiretriz R&TTE.
Relatórios de TestesLaboratório Número do Relatório
Austest Laboratories 0419NAVGO5XSE_60950EMC Technologies 151215_1, 151215_2SPORTON LAB EH3N2752-01, ER4O2349
Instituição Notificada envolvidaNome Endereço Número da observação
MET Laboratories, Inc. 914 West Patapsco Avenue, Baltimore, Maryland 21230-3432, Estados Unidos. 0980
Eu, abaixo assinado, declaro que o equipamento acima especificado está em conformidade com a diretriz e as normasacima para a marcação CE para venda na Comunidade Europeia.
Representante autorizadoEndereço Mercury Marine, W6250 Pioneer Road, P.O. Box 1939 Fond du Lac, WI 54936-1939
Assinatura
John Pfeifer, Presidente, Mercury Marine
Data 07/06/2016
Chama-se a atenção do comprador, instalador, ou usuário para as medidas especiais e limitações de uso que devem serobservadas quando o produto é colocado em uso para manter a conformidade com as diretrizes acima. Detalhes dessasmedidas especiais e limitações de uso estão contidas nos manuais apropriados do produto.
VesselView 702A Mercury Marine declara que o seguinte produto ao qual se refere esta declaração está em conformidade com osrequisitos da diretriz da UE 1999/5/EC R&TTE (Equipamentos Terminais de Rádio e Telecomunicações) e satisfaz todosos regulamentos técnicos aplicáveis.A avaliação foi efetuada de acordo com o Anexo IV da diretriz acima.
Produto Mercury Marine VesselView 702
Este produto foi testado com as seguintes normas.
Padrão Descrição
EN 60950-1:2006 Equipamentos de tecnologia da informação - Segurança - Parte 1: Requisitos gerais que cobrem as exigências essenciais do artigo3.1 (a) da Diretriz R&TTE
IEC 60945:2002 Equipamentos e sistemas de navegação e radiocomunicação marítimas - requisitos gerais - métodos de ensaio e resultadosrequeridos. Cobrindo as exigências essenciais do artigo 3.1(b) da Diretriz R&TTE.
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 3
Padrão Descrição
EN 300 440-2 V1.4.1Compatibilidade eletromagnética e tópicos de espectro de rádio (ERM); Equipamento de curto alcance; Equipamento de rádio paraser utilizado na faixa de frequência de 1 GHz a 40 GHz; Parte 2: EN harmonizada cobrindo os requisitos essenciais do artigo 3.2 daDiretriz R&TTE.
Relatórios de TestesLaboratório Número do Relatório
EMC Technologies (NZ) Ltd. 131216.1, 131216.2Austest Laboratories 0519NAVNS57evo2_60950, 0409NAVN5S7evo2_529
Instituição Notificada envolvidaNome Endereço Número da observação
MET Laboratories, Inc. 914 West Patapsco Avenue, Baltimore, Maryland 21230-3432, Estados Unidos. 0980
Eu, abaixo assinado, declaro que o equipamento acima especificado está em conformidade com a diretriz e as normasacima para a marcação CE para venda na Comunidade Europeia.
Representante autorizadoEndereço Mercury Marine, W6250 Pioneer Road, P.O. Box 1939 Fond du Lac, WI 54936-1939
Assinatura
John Pfeifer, Presidente, Mercury Marine
Data 07/06/2016
Chama-se a atenção do comprador, instalador, ou usuário para as medidas especiais e limitações de uso que devem serobservadas quando o produto é colocado em uso para manter a conformidade com as diretrizes acima. Detalhes dessasmedidas especiais e limitações de uso estão contidas nos manuais apropriados do produto.
Visão geral do VesselViewIMPORTANTE: O VesselView é um monitor multifuncional (MFD) compatível com produtos fabricados pela MercuryMarine Outboards, Mercury MerCruiser, Mercury Diesel. Além disso, o software VesselView pode ser instalado emdispositivos de visualização compatíveis do Lowrance® e Simrad®. Algumas das funções explicadas neste manual serãodesabilitadas, dependendo do conjunto de alimentação ao qual esteja conectado.IMPORTANTE: O sistema de gerenciamento do barco VesselView consiste de duas partes; a unidade VesselView e oMódulo VesselView Link. O VesselView Link lê os dados SmartCraft da Mercury e transmite essa informação através darede NMEA 2K.O VesselView é um centro de informações abrangente que exibe informações para até quatro motores a gasolina oudiesel. Ele monitora e fornece dados de operação continuamente, além de informações detalhadas tais como: temperaturae profundidade da água, status do compensador, ângulo de direção e velocidade do barco e o status dos tanques decombustível, óleo, água e resíduos.O VesselView pode ser completamente integrado ao sistema de posicionamento global (GPS) do barco ou outrosdispositivos compatíveis com NMEA, para fornecer informações atualizadas sobre a navegação, velocidade e combustívelaté o destino.O VesselView é uma extensão do monitor para operações com joystick e piloto automático. Todas as funcionalidadesdesses recursos de pilotagem são controladas através da placa da rede de área de controle (CAN) do piloto automático daMercury Marine. O VesselView mostrará se um modo de controle está ativo ou em espera. As janelas pop-up aparecerãoconforme o barco chega aos pontos de destino, solicitando respostas para curvas. Podem ser usados textos de exibiçãoadicionais para ajustar os motores e acionamentos para se obter a eficiência máxima.O VesselView é equipado com uma porta para cartão micro SD que permite a importação ou exportação da configuraçãoda identidade do barco. Ele também pode ser usado pelo proprietário para atualizar a versão mais recente do software.Quando for usado mais de um VesselView, como uma aplicação com motor triplo ou motor quádruplo, ou um segundoleme, o mesmo cartão micro SD pode ser usado para baixar essas configurações para cada unidade do VesselView.
Seção 1 - Introdução
Página 4 90-8M0122370 por JUNHO 2016
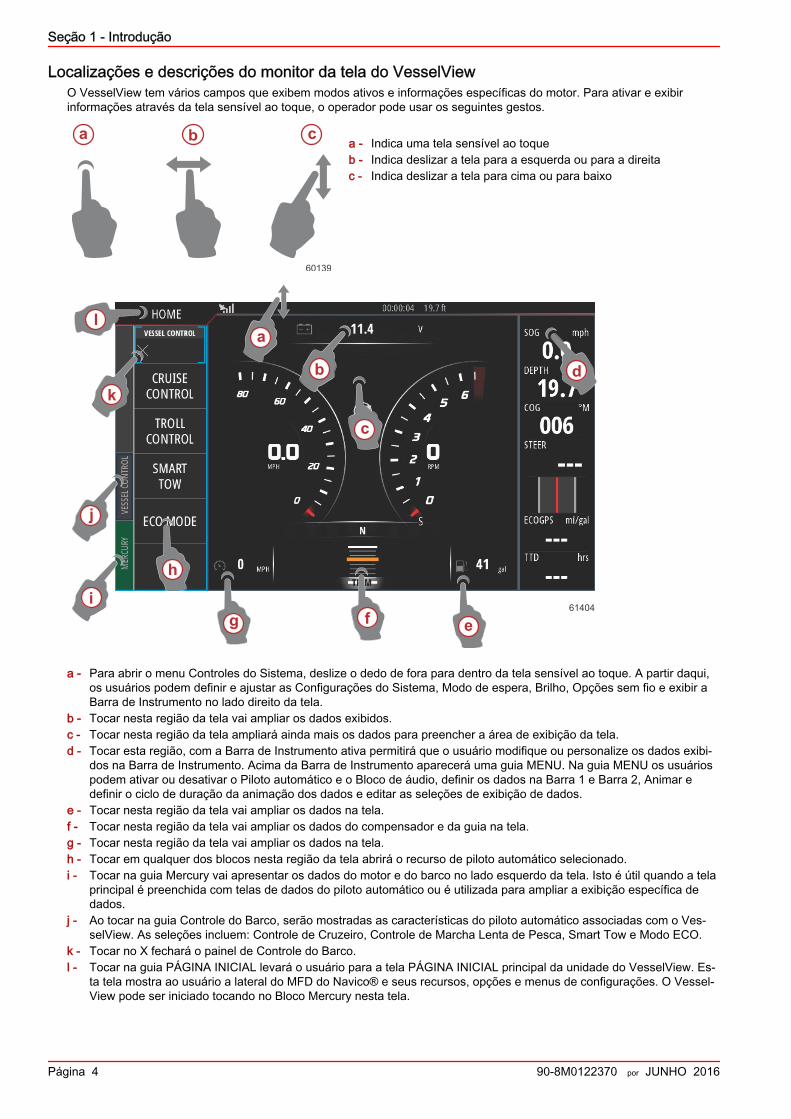
Localizações e descrições do monitor da tela do VesselViewO VesselView tem vários campos que exibem modos ativos e informações específicas do motor. Para ativar e exibirinformações através da tela sensível ao toque, o operador pode usar os seguintes gestos.
a - Indica uma tela sensível ao toqueb - Indica deslizar a tela para a esquerda ou para a direitac - Indica deslizar a tela para cima ou para baixo
a - Para abrir o menu Controles do Sistema, deslize o dedo de fora para dentro da tela sensível ao toque. A partir daqui,os usuários podem definir e ajustar as Configurações do Sistema, Modo de espera, Brilho, Opções sem fio e exibir aBarra de Instrumento no lado direito da tela.
b - Tocar nesta região da tela vai ampliar os dados exibidos.c - Tocar nesta região da tela ampliará ainda mais os dados para preencher a área de exibição da tela.d - Tocar esta região, com a Barra de Instrumento ativa permitirá que o usuário modifique ou personalize os dados exibi‐
dos na Barra de Instrumento. Acima da Barra de Instrumento aparecerá uma guia MENU. Na guia MENU os usuáriospodem ativar ou desativar o Piloto automático e o Bloco de áudio, definir os dados na Barra 1 e Barra 2, Animar edefinir o ciclo de duração da animação dos dados e editar as seleções de exibição de dados.
e - Tocar nesta região da tela vai ampliar os dados na tela.f - Tocar nesta região da tela vai ampliar os dados do compensador e da guia na tela.g - Tocar nesta região da tela vai ampliar os dados na tela.h - Tocar em qualquer dos blocos nesta região da tela abrirá o recurso de piloto automático selecionado.i - Tocar na guia Mercury vai apresentar os dados do motor e do barco no lado esquerdo da tela. Isto é útil quando a tela
principal é preenchida com telas de dados do piloto automático ou é utilizada para ampliar a exibição específica dedados.
j - Ao tocar na guia Controle do Barco, serão mostradas as características do piloto automático associadas com o Ves‐selView. As seleções incluem: Controle de Cruzeiro, Controle de Marcha Lenta de Pesca, Smart Tow e Modo ECO.
k - Tocar no X fechará o painel de Controle do Barco.l - Tocar na guia PÁGINA INICIAL levará o usuário para a tela PÁGINA INICIAL principal da unidade do VesselView. Es‐
ta tela mostra ao usuário a lateral do MFD do Navico® e seus recursos, opções e menus de configurações. O Vessel‐View pode ser iniciado tocando no Bloco Mercury nesta tela.
60139
a b c
61404
a
b
c
d
efg
h
i
j
k
l
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 5
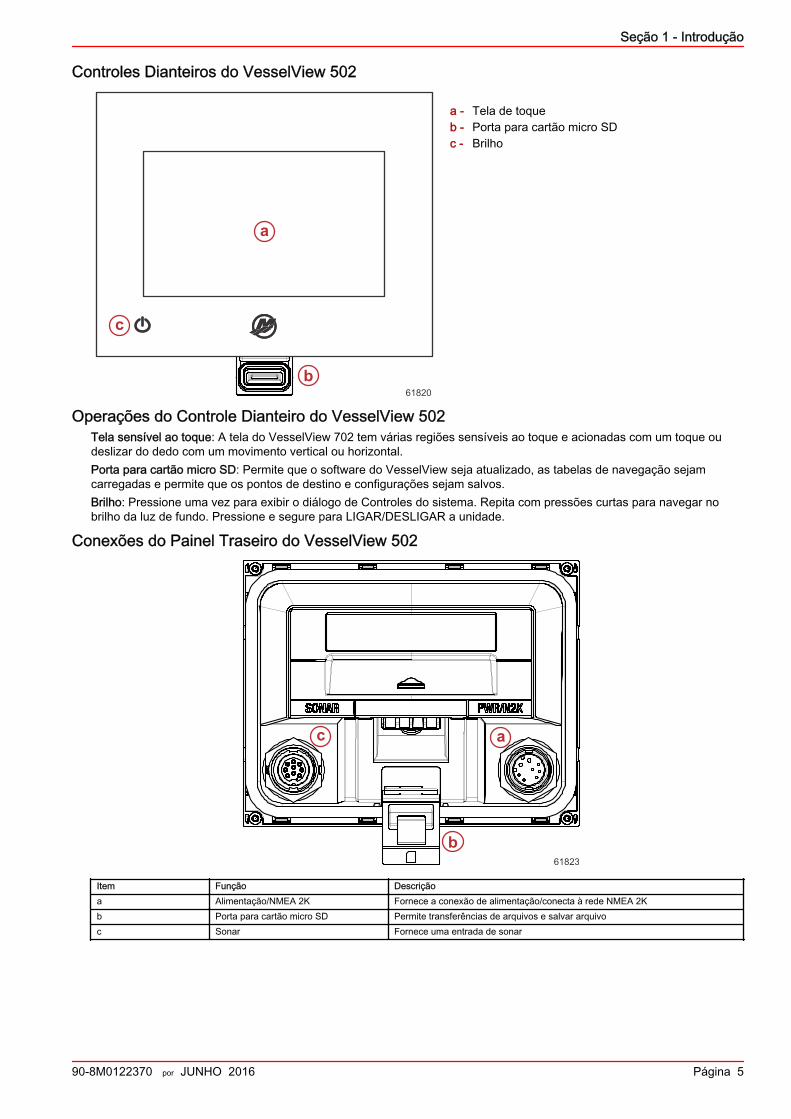
Controles Dianteiros do VesselView 502
a - Tela de toqueb - Porta para cartão micro SDc - Brilho
Operações do Controle Dianteiro do VesselView 502Tela sensível ao toque: A tela do VesselView 702 tem várias regiões sensíveis ao toque e acionadas com um toque oudeslizar do dedo com um movimento vertical ou horizontal.Porta para cartão micro SD: Permite que o software do VesselView seja atualizado, as tabelas de navegação sejamcarregadas e permite que os pontos de destino e configurações sejam salvos.Brilho: Pressione uma vez para exibir o diálogo de Controles do sistema. Repita com pressões curtas para navegar nobrilho da luz de fundo. Pressione e segure para LIGAR/DESLIGAR a unidade.
Conexões do Painel Traseiro do VesselView 502
a
b
c
61823
Item Função Descriçãoa Alimentação/NMEA 2K Fornece a conexão de alimentação/conecta à rede NMEA 2Kb Porta para cartão micro SD Permite transferências de arquivos e salvar arquivoc Sonar Fornece uma entrada de sonar
a
b61820
c
Seção 1 - Introdução
Página 6 90-8M0122370 por JUNHO 2016
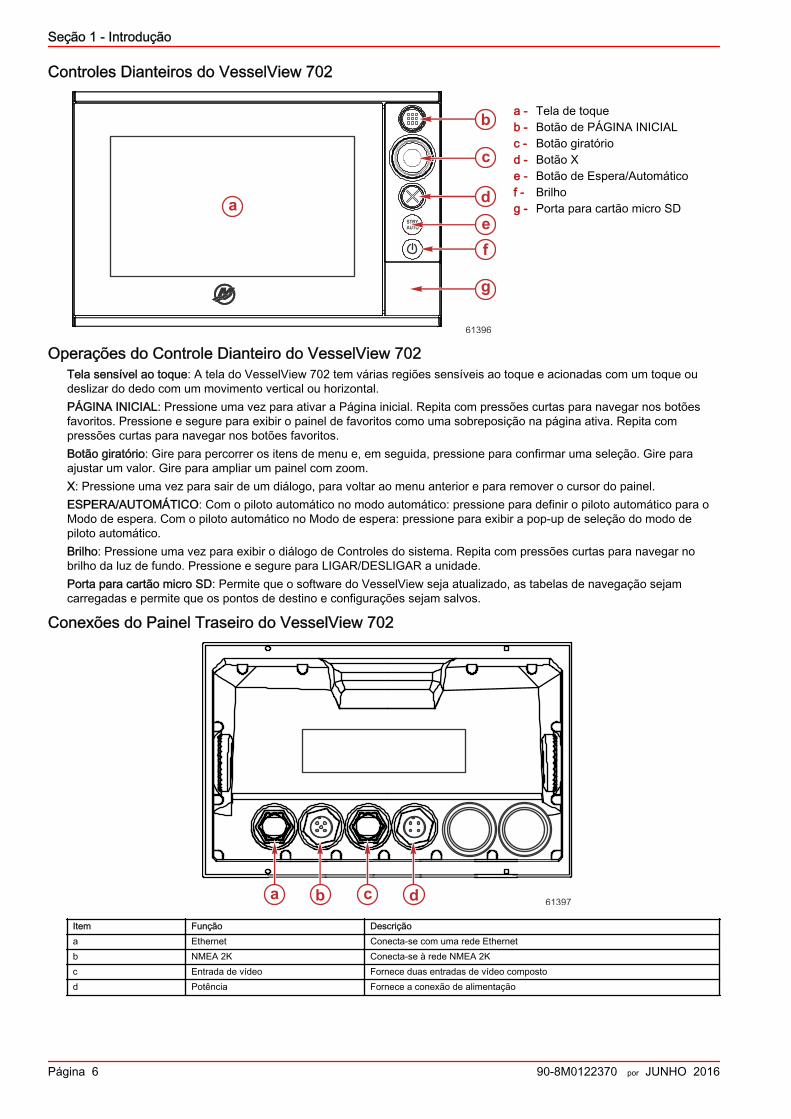
Controles Dianteiros do VesselView 702
a - Tela de toqueb - Botão de PÁGINA INICIALc - Botão giratóriod - Botão Xe - Botão de Espera/Automáticof - Brilhog - Porta para cartão micro SD
Operações do Controle Dianteiro do VesselView 702Tela sensível ao toque: A tela do VesselView 702 tem várias regiões sensíveis ao toque e acionadas com um toque oudeslizar do dedo com um movimento vertical ou horizontal.PÁGINA INICIAL: Pressione uma vez para ativar a Página inicial. Repita com pressões curtas para navegar nos botõesfavoritos. Pressione e segure para exibir o painel de favoritos como uma sobreposição na página ativa. Repita compressões curtas para navegar nos botões favoritos.Botão giratório: Gire para percorrer os itens de menu e, em seguida, pressione para confirmar uma seleção. Gire paraajustar um valor. Gire para ampliar um painel com zoom.X: Pressione uma vez para sair de um diálogo, para voltar ao menu anterior e para remover o cursor do painel.ESPERA/AUTOMÁTICO: Com o piloto automático no modo automático: pressione para definir o piloto automático para oModo de espera. Com o piloto automático no Modo de espera: pressione para exibir a pop-up de seleção do modo depiloto automático.Brilho: Pressione uma vez para exibir o diálogo de Controles do sistema. Repita com pressões curtas para navegar nobrilho da luz de fundo. Pressione e segure para LIGAR/DESLIGAR a unidade.Porta para cartão micro SD: Permite que o software do VesselView seja atualizado, as tabelas de navegação sejamcarregadas e permite que os pontos de destino e configurações sejam salvos.
Conexões do Painel Traseiro do VesselView 702
61397a b c d
Item Função Descriçãoa Ethernet Conecta-se com uma rede Ethernetb NMEA 2K Conecta-se à rede NMEA 2Kc Entrada de vídeo Fornece duas entradas de vídeo compostod Potência Fornece a conexão de alimentação
a
61396
STBYAUTO
b
c
def
g
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 7
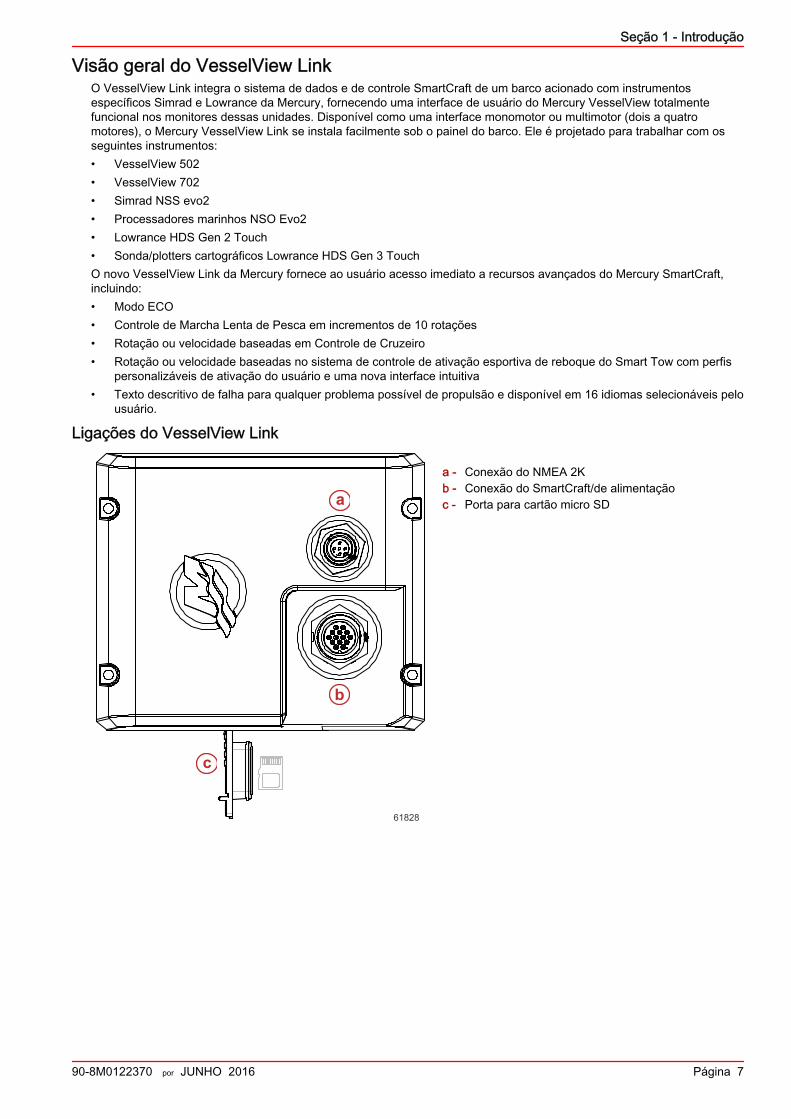
Visão geral do VesselView LinkO VesselView Link integra o sistema de dados e de controle SmartCraft de um barco acionado com instrumentosespecíficos Simrad e Lowrance da Mercury, fornecendo uma interface de usuário do Mercury VesselView totalmentefuncional nos monitores dessas unidades. Disponível como uma interface monomotor ou multimotor (dois a quatromotores), o Mercury VesselView Link se instala facilmente sob o painel do barco. Ele é projetado para trabalhar com osseguintes instrumentos:• VesselView 502• VesselView 702• Simrad NSS evo2• Processadores marinhos NSO Evo2• Lowrance HDS Gen 2 Touch• Sonda/plotters cartográficos Lowrance HDS Gen 3 TouchO novo VesselView Link da Mercury fornece ao usuário acesso imediato a recursos avançados do Mercury SmartCraft,incluindo:• Modo ECO• Controle de Marcha Lenta de Pesca em incrementos de 10 rotações• Rotação ou velocidade baseadas em Controle de Cruzeiro• Rotação ou velocidade baseadas no sistema de controle de ativação esportiva de reboque do Smart Tow com perfis
personalizáveis de ativação do usuário e uma nova interface intuitiva• Texto descritivo de falha para qualquer problema possível de propulsão e disponível em 16 idiomas selecionáveis pelo
usuário.
Ligações do VesselView Link
a - Conexão do NMEA 2Kb - Conexão do SmartCraft/de alimentaçãoc - Porta para cartão micro SDa
b
c
61828
Seção 1 - Introdução
Página 8 90-8M0122370 por JUNHO 2016
Tela de Navegação SeguraCada vez que o VesselView é acionado, depois de um encerramento completo de 30 segundos ou mais, uma telacontendo avisos sobre a segurança de navegação é exibida para o operador. Toque no botão Aceitar para continuar.
61413
Como atualizar seu Software VesselViewExistem duas maneiras para atualizar o software do VesselView.
Consulta automática de Wi-FiO VesselView 502 é equipado com um módulo de wi-fi e conectividade Bluetooth. Quando ligada, a unidade consultaráperiodicamente a internet para determinar se há um arquivo de atualização disponível no site da Mercury Marine. Umanotificação de tela para confirmar atualizações solicitará ao operador para aceitar uma atualização.O VesselView 702 tem conectividade com a Internet, mas deve estar no intervalo de um hotspot wi-fi, ou dispositivo móvelconfigurado para ser um hotspot wi-fi, para consultar a internet para obter atualizações no site da Mercury Marine. Se fordetectada uma atualização, um aviso de tela orientará o operador através do processo de atualização.
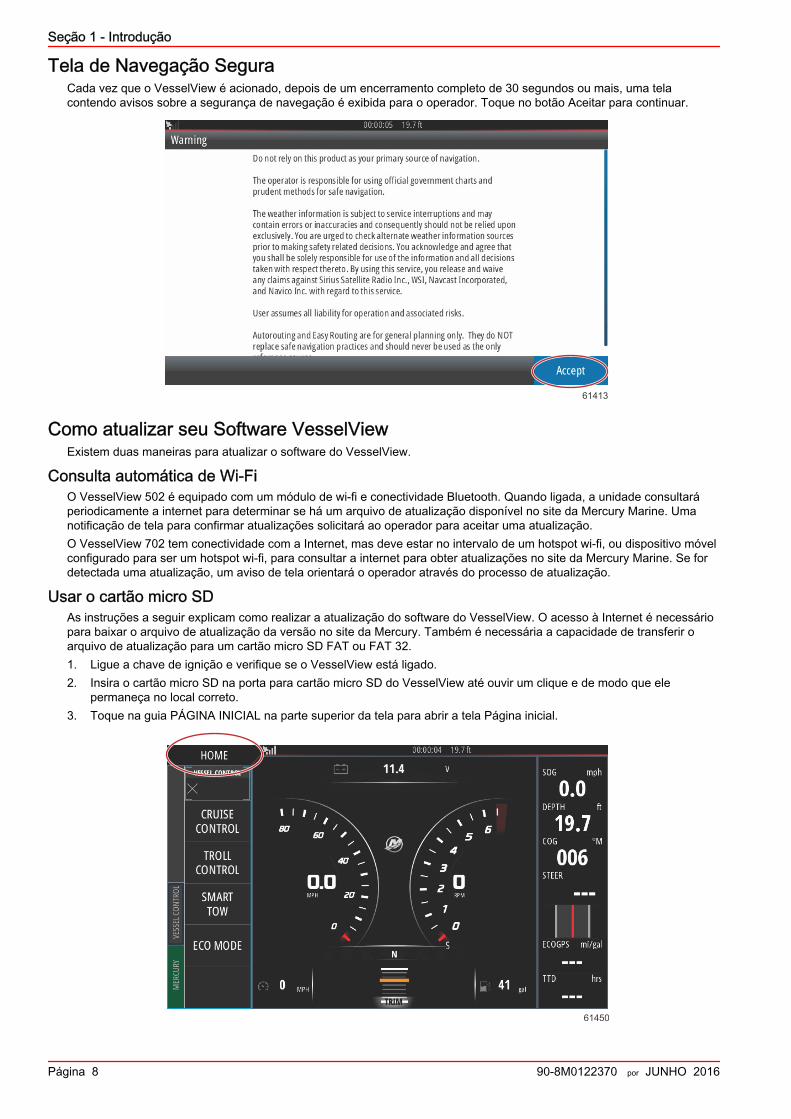
Usar o cartão micro SDAs instruções a seguir explicam como realizar a atualização do software do VesselView. O acesso à Internet é necessáriopara baixar o arquivo de atualização da versão no site da Mercury. Também é necessária a capacidade de transferir oarquivo de atualização para um cartão micro SD FAT ou FAT 32.1. Ligue a chave de ignição e verifique se o VesselView está ligado.2. Insira o cartão micro SD na porta para cartão micro SD do VesselView até ouvir um clique e de modo que ele
permaneça no local correto.3. Toque na guia PÁGINA INICIAL na parte superior da tela para abrir a tela Página inicial.
61450
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 9
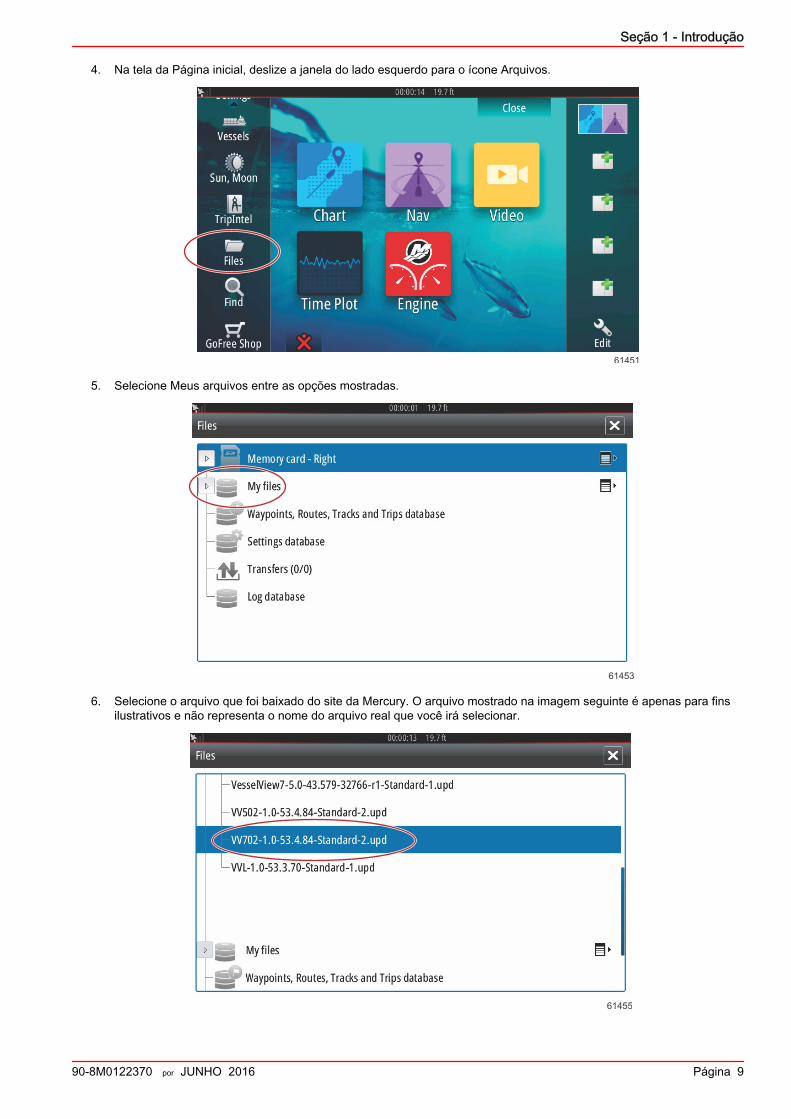
4. Na tela da Página inicial, deslize a janela do lado esquerdo para o ícone Arquivos.
61451
5. Selecione Meus arquivos entre as opções mostradas.
61453
6. Selecione o arquivo que foi baixado do site da Mercury. O arquivo mostrado na imagem seguinte é apenas para finsilustrativos e não representa o nome do arquivo real que você irá selecionar.
61455
Seção 1 - Introdução
Página 10 90-8M0122370 por JUNHO 2016
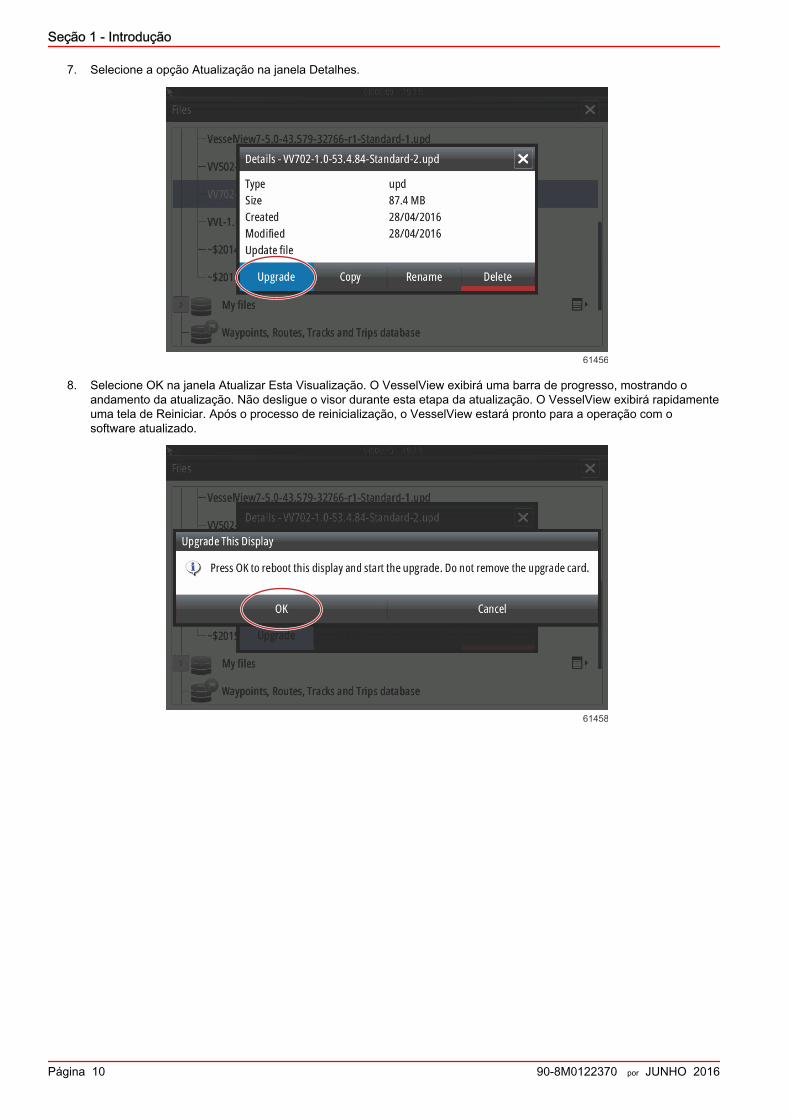
7. Selecione a opção Atualização na janela Detalhes.
61456
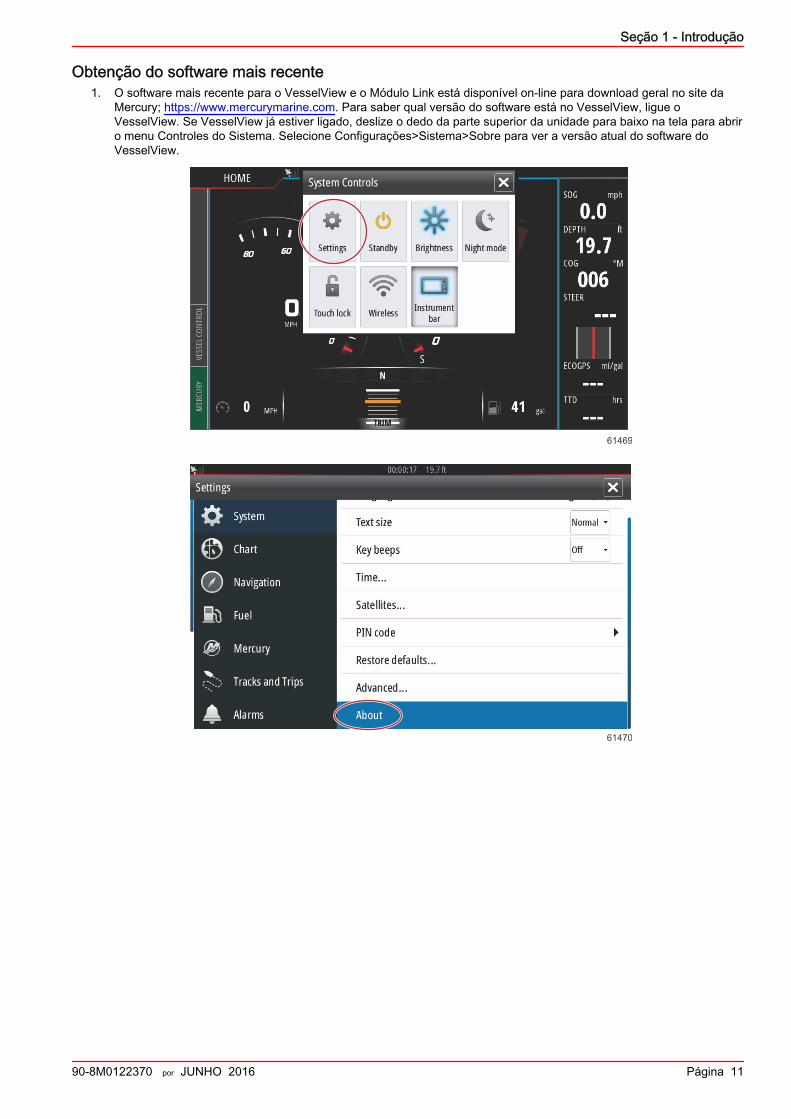
8. Selecione OK na janela Atualizar Esta Visualização. O VesselView exibirá uma barra de progresso, mostrando oandamento da atualização. Não desligue o visor durante esta etapa da atualização. O VesselView exibirá rapidamenteuma tela de Reiniciar. Após o processo de reinicialização, o VesselView estará pronto para a operação com osoftware atualizado.
61458
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 11
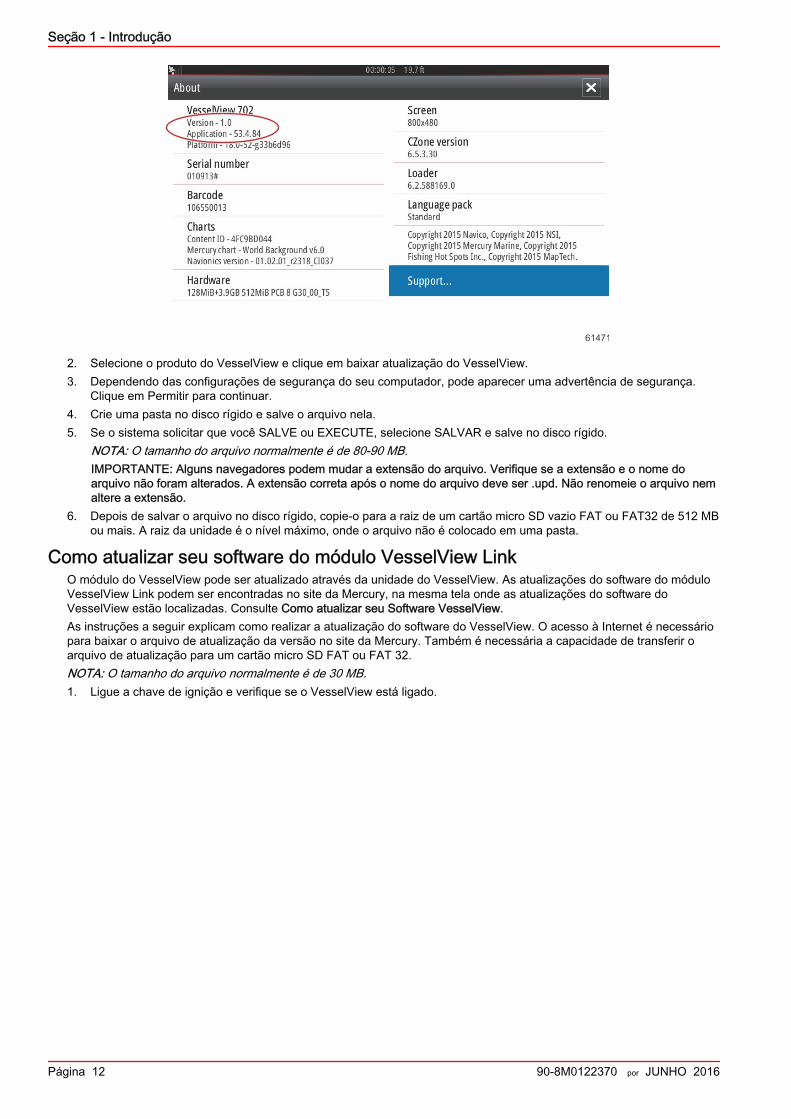
Obtenção do software mais recente1. O software mais recente para o VesselView e o Módulo Link está disponível on-line para download geral no site da
Mercury; https://www.mercurymarine.com. Para saber qual versão do software está no VesselView, ligue oVesselView. Se VesselView já estiver ligado, deslize o dedo da parte superior da unidade para baixo na tela para abriro menu Controles do Sistema. Selecione Configurações>Sistema>Sobre para ver a versão atual do software doVesselView.
61469
61470
Seção 1 - Introdução
Página 12 90-8M0122370 por JUNHO 2016
61471
2. Selecione o produto do VesselView e clique em baixar atualização do VesselView.3. Dependendo das configurações de segurança do seu computador, pode aparecer uma advertência de segurança.
Clique em Permitir para continuar.4. Crie uma pasta no disco rígido e salve o arquivo nela.5. Se o sistema solicitar que você SALVE ou EXECUTE, selecione SALVAR e salve no disco rígido.
NOTA: O tamanho do arquivo normalmente é de 80-90 MB.IMPORTANTE: Alguns navegadores podem mudar a extensão do arquivo. Verifique se a extensão e o nome doarquivo não foram alterados. A extensão correta após o nome do arquivo deve ser .upd. Não renomeie o arquivo nemaltere a extensão.
6. Depois de salvar o arquivo no disco rígido, copie-o para a raiz de um cartão micro SD vazio FAT ou FAT32 de 512 MBou mais. A raiz da unidade é o nível máximo, onde o arquivo não é colocado em uma pasta.
Como atualizar seu software do módulo VesselView LinkO módulo do VesselView pode ser atualizado através da unidade do VesselView. As atualizações do software do móduloVesselView Link podem ser encontradas no site da Mercury, na mesma tela onde as atualizações do software doVesselView estão localizadas. Consulte Como atualizar seu Software VesselView.As instruções a seguir explicam como realizar a atualização do software do VesselView. O acesso à Internet é necessáriopara baixar o arquivo de atualização da versão no site da Mercury. Também é necessária a capacidade de transferir oarquivo de atualização para um cartão micro SD FAT ou FAT 32.NOTA: O tamanho do arquivo normalmente é de 30 MB.1. Ligue a chave de ignição e verifique se o VesselView está ligado.
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 13
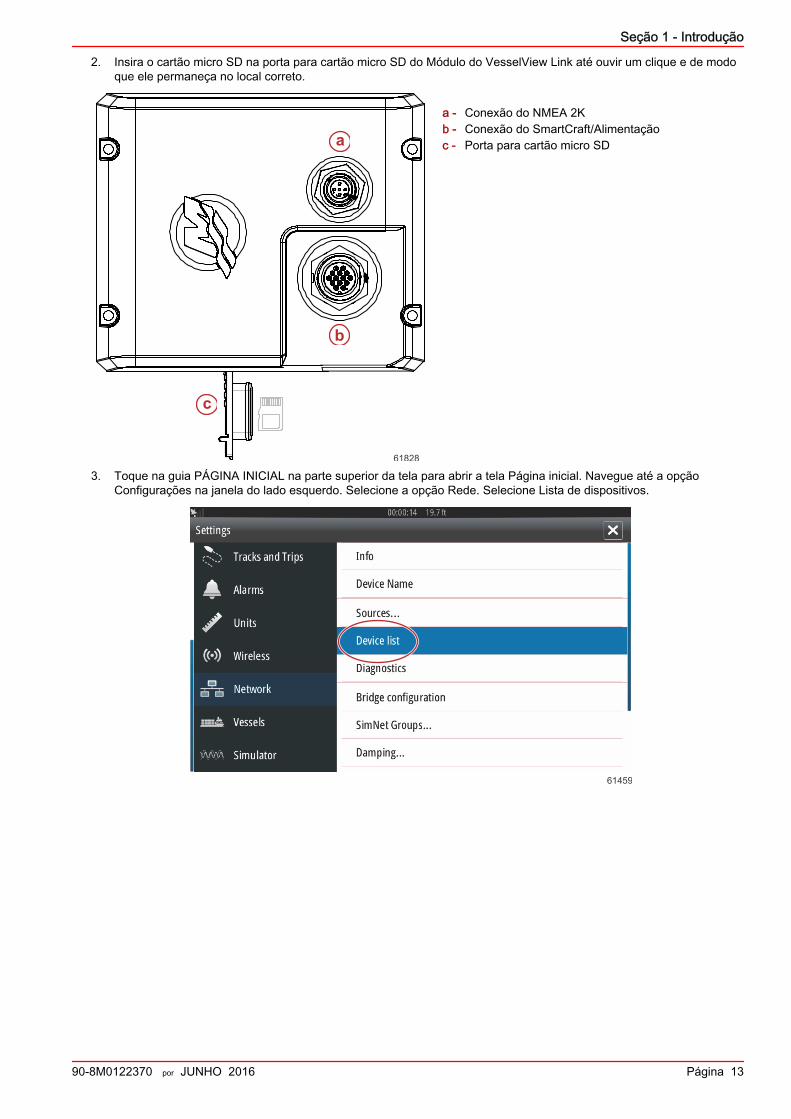
2. Insira o cartão micro SD na porta para cartão micro SD do Módulo do VesselView Link até ouvir um clique e de modoque ele permaneça no local correto.
a - Conexão do NMEA 2Kb - Conexão do SmartCraft/Alimentaçãoc - Porta para cartão micro SD
3. Toque na guia PÁGINA INICIAL na parte superior da tela para abrir a tela Página inicial. Navegue até a opçãoConfigurações na janela do lado esquerdo. Selecione a opção Rede. Selecione Lista de dispositivos.
61459
a
b
c
61828
Seção 1 - Introdução
Página 14 90-8M0122370 por JUNHO 2016
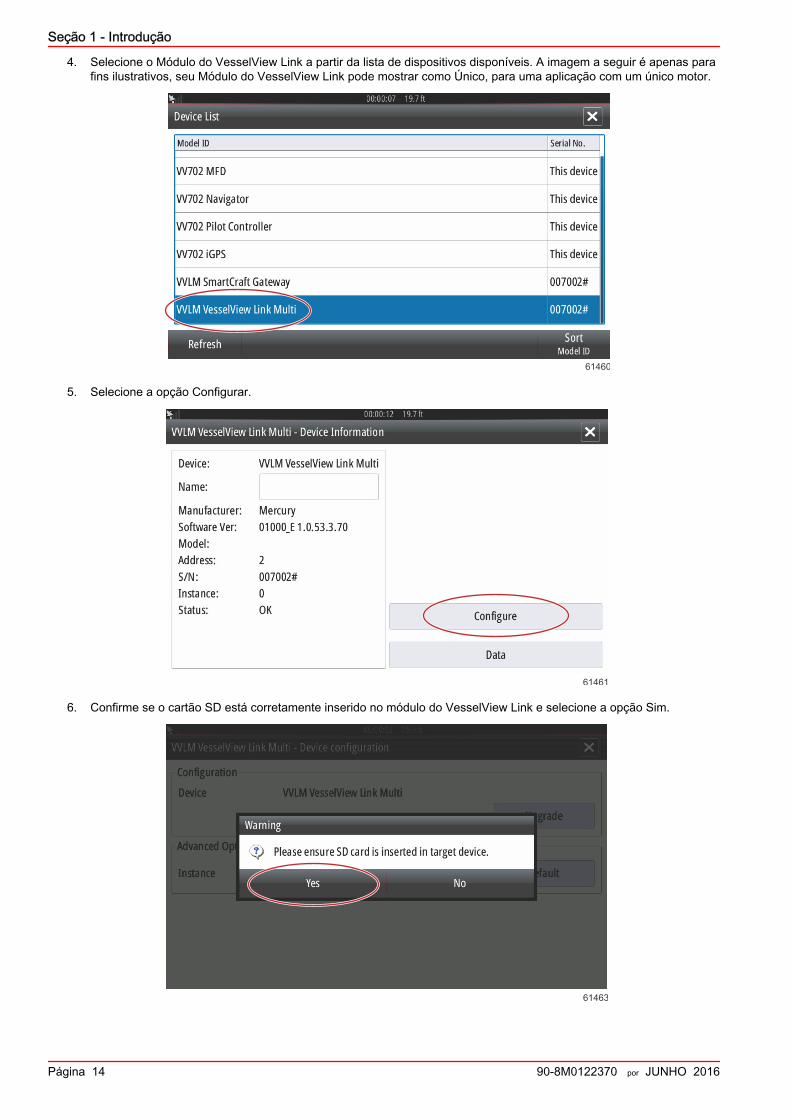
4. Selecione o Módulo do VesselView Link a partir da lista de dispositivos disponíveis. A imagem a seguir é apenas parafins ilustrativos, seu Módulo do VesselView Link pode mostrar como Único, para uma aplicação com um único motor.
61460
5. Selecione a opção Configurar.
61461
6. Confirme se o cartão SD está corretamente inserido no módulo do VesselView Link e selecione a opção Sim.
61463

Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 15
7. Selecione a opção Atualização na janela Configuração do dispositivo.
61840
8. O VesselView exibirá uma barra de progresso, mostrando o andamento da atualização do Módulo do VesselViewLink. Não desligue o visor durante esta etapa da atualização.
61465
Seção 1 - Introdução
Página 16 90-8M0122370 por JUNHO 2016
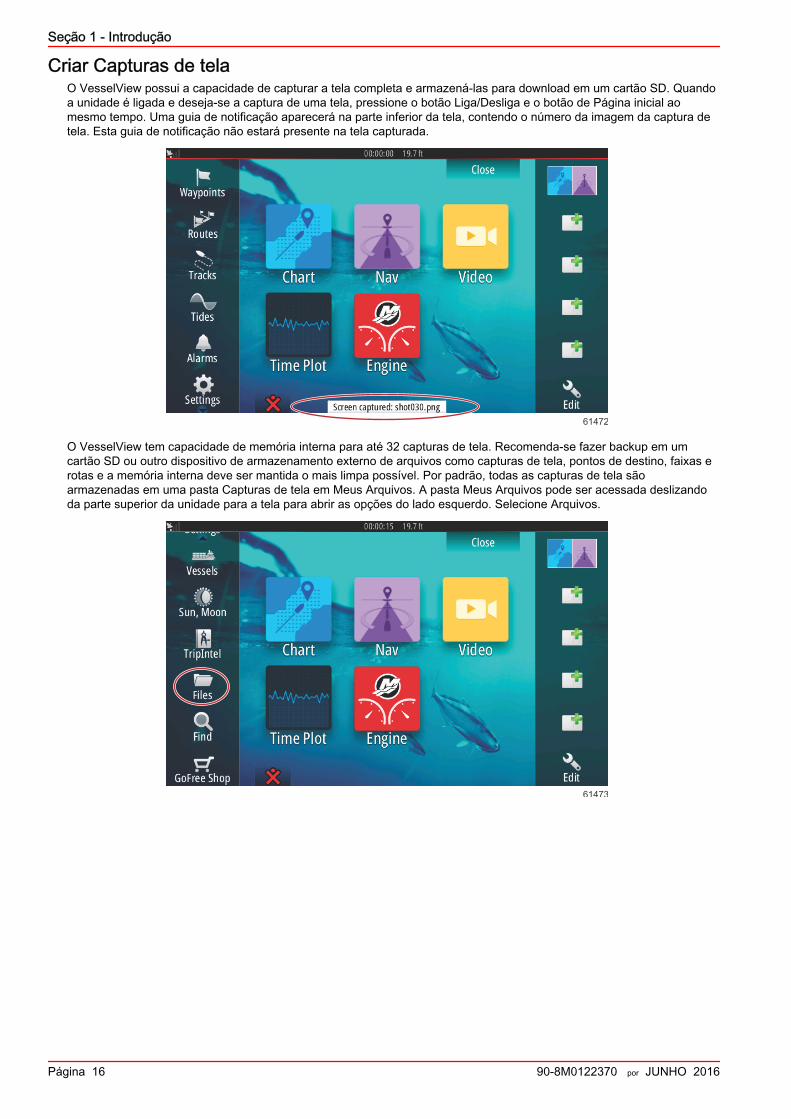
Criar Capturas de telaO VesselView possui a capacidade de capturar a tela completa e armazená-las para download em um cartão SD. Quandoa unidade é ligada e deseja-se a captura de uma tela, pressione o botão Liga/Desliga e o botão de Página inicial aomesmo tempo. Uma guia de notificação aparecerá na parte inferior da tela, contendo o número da imagem da captura detela. Esta guia de notificação não estará presente na tela capturada.
61472
O VesselView tem capacidade de memória interna para até 32 capturas de tela. Recomenda-se fazer backup em umcartão SD ou outro dispositivo de armazenamento externo de arquivos como capturas de tela, pontos de destino, faixas erotas e a memória interna deve ser mantida o mais limpa possível. Por padrão, todas as capturas de tela sãoarmazenadas em uma pasta Capturas de tela em Meus Arquivos. A pasta Meus Arquivos pode ser acessada deslizandoda parte superior da unidade para a tela para abrir as opções do lado esquerdo. Selecione Arquivos.
61473
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 17
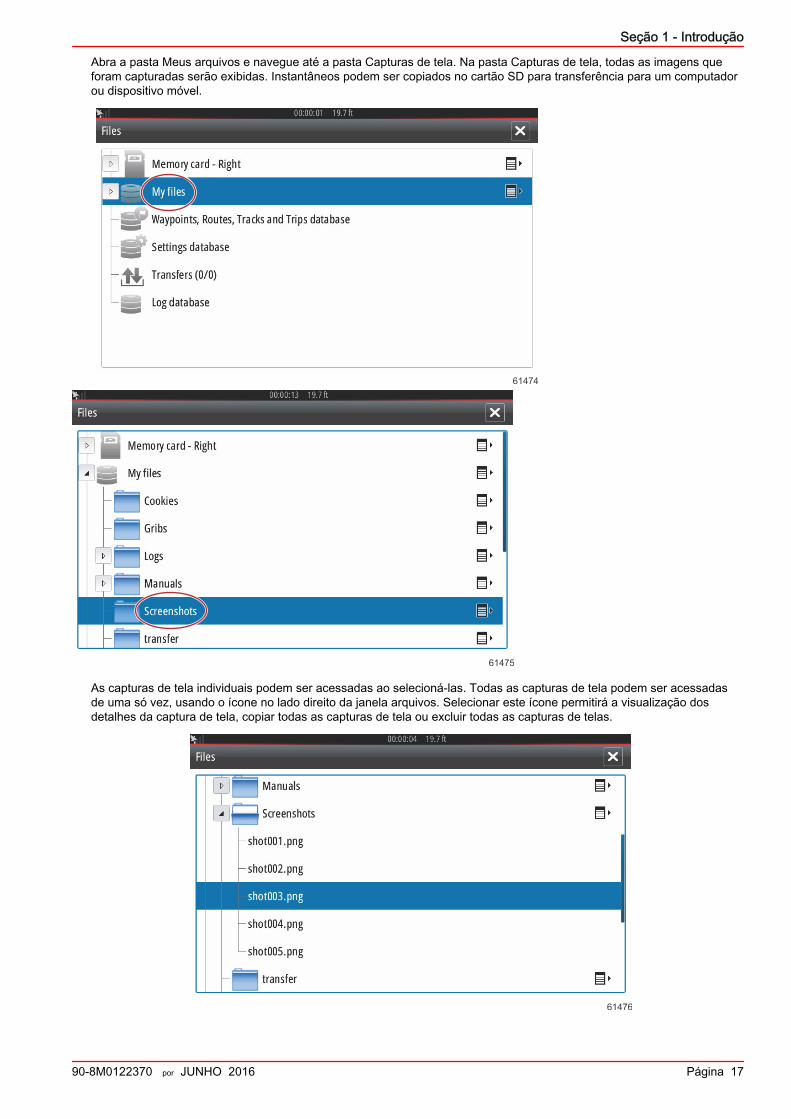
Abra a pasta Meus arquivos e navegue até a pasta Capturas de tela. Na pasta Capturas de tela, todas as imagens queforam capturadas serão exibidas. Instantâneos podem ser copiados no cartão SD para transferência para um computadorou dispositivo móvel.
61474
61475
As capturas de tela individuais podem ser acessadas ao selecioná-las. Todas as capturas de tela podem ser acessadasde uma só vez, usando o ícone no lado direito da janela arquivos. Selecionar este ícone permitirá a visualização dosdetalhes da captura de tela, copiar todas as capturas de tela ou excluir todas as capturas de telas.
61476
Seção 1 - Introdução
Página 18 90-8M0122370 por JUNHO 2016
61477
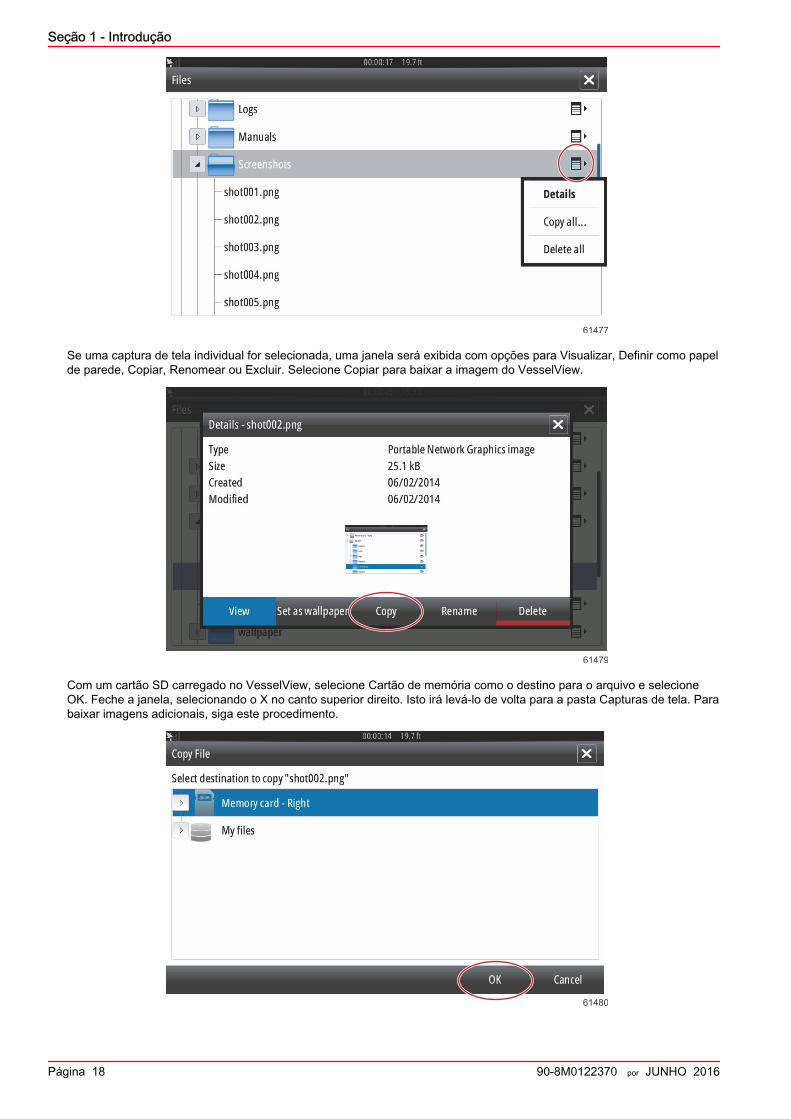
Se uma captura de tela individual for selecionada, uma janela será exibida com opções para Visualizar, Definir como papelde parede, Copiar, Renomear ou Excluir. Selecione Copiar para baixar a imagem do VesselView.
61479
Com um cartão SD carregado no VesselView, selecione Cartão de memória como o destino para o arquivo e selecioneOK. Feche a janela, selecionando o X no canto superior direito. Isto irá levá-lo de volta para a pasta Capturas de tela. Parabaixar imagens adicionais, siga este procedimento.
61480

Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 19
Menus que não são da Mercury MarineOs operadores podem encontrar-se fora das telas reconhecíveis da Mercury Marine do VesselView. Estes menus eopções são referidos como as laterais do Navico® do VesselView. A Mercury Marine não suporta esses componentes daunidade. Para informações adicionais sobre esta lateral do VesselView, entre em contato com Navico®. Para voltar paraas telas de navegação laterais da unidade da Mercury Marine, pressione o botão de Página Inicial e o bloco Motor daMercury irá aparecer. Selecione este bloco para retornar à tela do VesselView.
61481
A janela de Controles do Sistema pode ser aberta deslizando a partir da parte superior da unidade na tela. Isto permitiráao usuário; utilizar o menu Configurações da Mercury, colocar a unidade no Modo de espera, ajustar o brilho da tela,executar em modo noturno, ativar o recurso de Bloqueio de toque, personalizar a conectividade sem fio e ativar a barra deinstrumento no lado direito do monitor.
61482
Seção 1 - Introdução
Página 20 90-8M0122370 por JUNHO 2016
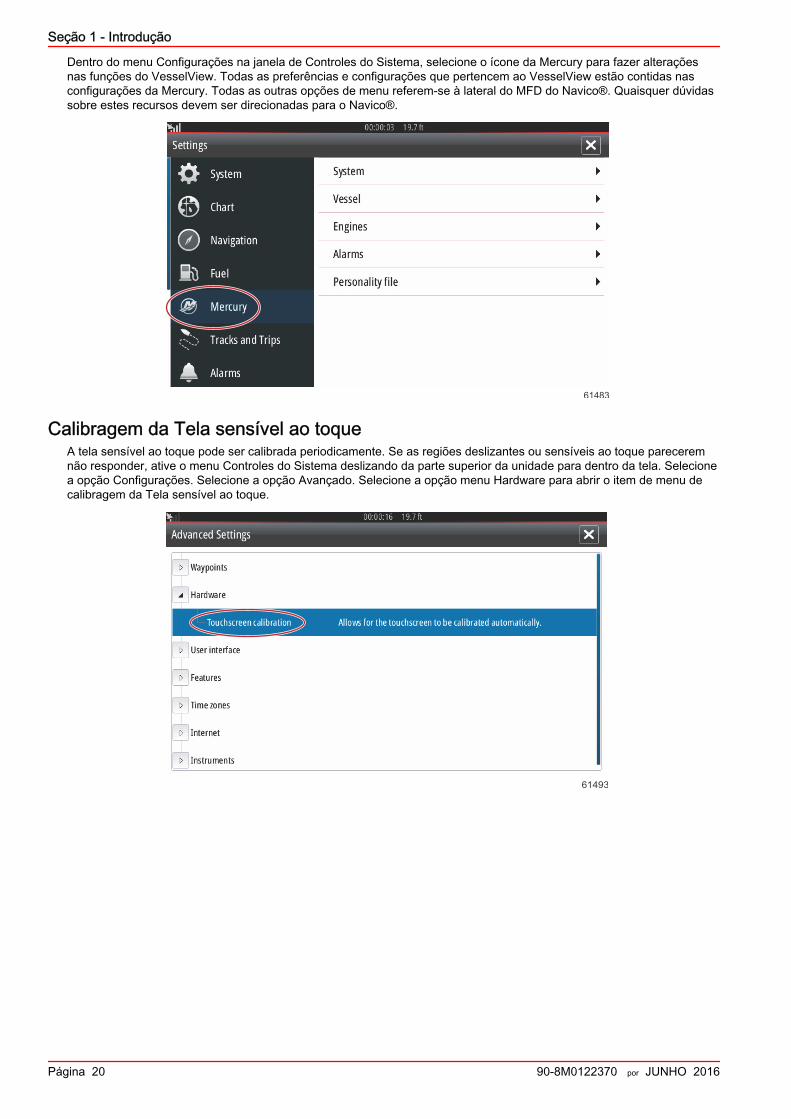
Dentro do menu Configurações na janela de Controles do Sistema, selecione o ícone da Mercury para fazer alteraçõesnas funções do VesselView. Todas as preferências e configurações que pertencem ao VesselView estão contidas nasconfigurações da Mercury. Todas as outras opções de menu referem-se à lateral do MFD do Navico®. Quaisquer dúvidassobre estes recursos devem ser direcionadas para o Navico®.
61483
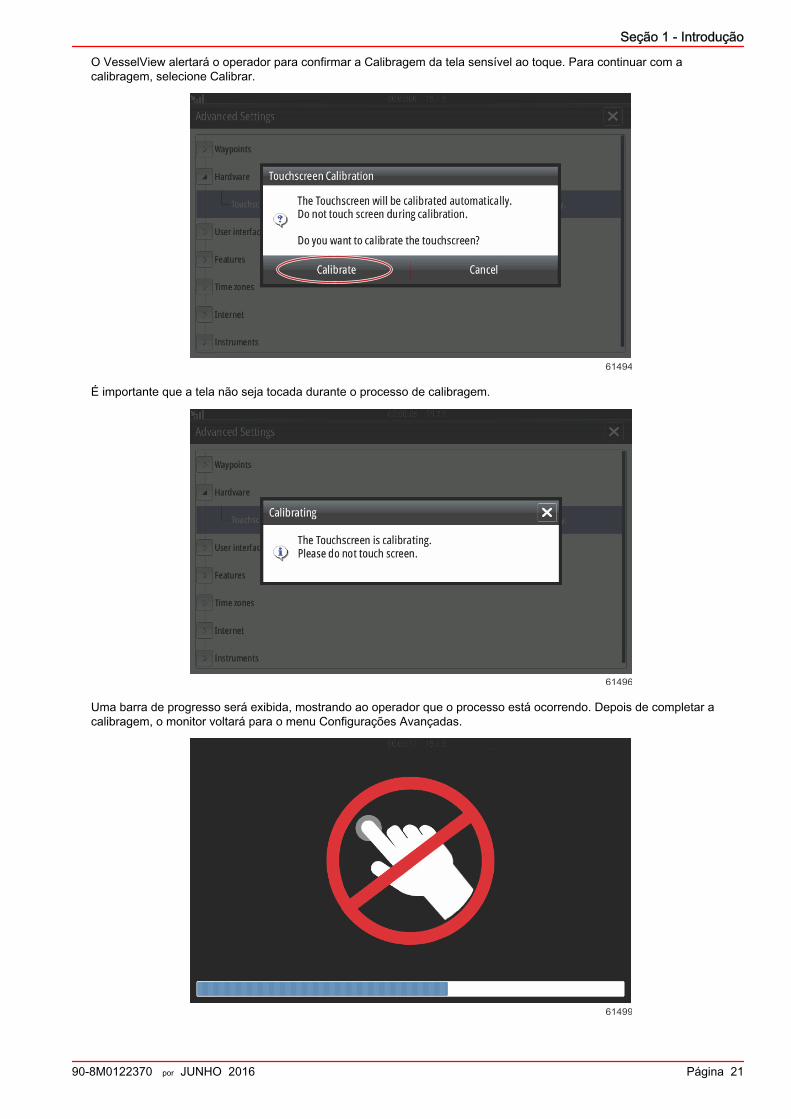
Calibragem da Tela sensível ao toqueA tela sensível ao toque pode ser calibrada periodicamente. Se as regiões deslizantes ou sensíveis ao toque pareceremnão responder, ative o menu Controles do Sistema deslizando da parte superior da unidade para dentro da tela. Selecionea opção Configurações. Selecione a opção Avançado. Selecione a opção menu Hardware para abrir o item de menu decalibragem da Tela sensível ao toque.
61493
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 21
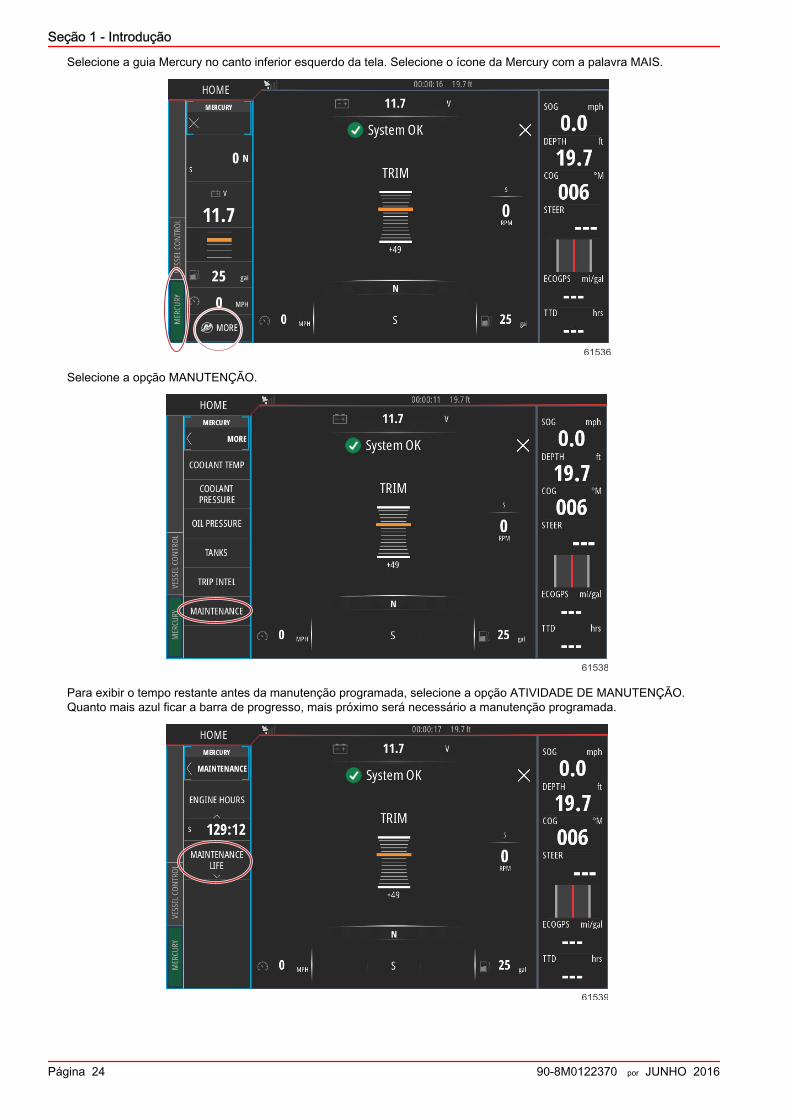
O VesselView alertará o operador para confirmar a Calibragem da tela sensível ao toque. Para continuar com acalibragem, selecione Calibrar.
61494
É importante que a tela não seja tocada durante o processo de calibragem.
61496
Uma barra de progresso será exibida, mostrando ao operador que o processo está ocorrendo. Depois de completar acalibragem, o monitor voltará para o menu Configurações Avançadas.
61499

Seção 1 - Introdução
Página 22 90-8M0122370 por JUNHO 2016
InicializaçãoNa inicialização, com a alimentação ligada e os motores desligados, depois da sequência da tela de abertura e da tela deconsulta, a tela principal será carregada e todos os dados e gráficos estarão ativos.No momento da inicialização do motor, o VesselView realizará uma verificação dos sistemas. Todos os sistemas do motorserão consultados sobre dados operacionais atuais. A verificação dos sistemas aparece visualmente na tela entre asvarreduras de velocidade e/ou rotação.
61486
61487

Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 23
Após a verificação dos sistemas, se todos os parâmetros do motor estiverem dentro das especificações, o VesselViewexibirá a mensagem de Sistema Ok acompanhada de um ícone de marca de seleção.
61488
Se um sistema de motor não passar na verificação dos sistemas, será exibido um curto texto descritivo de falha e umcurso de ação sugerida será exibido na tela. A guia Mercury no canto inferior esquerdo da tela será exibida em vermelhocom o símbolo de advertência internacional. Se houver mais de uma falha detectada na inicialização, o operador podenavegar pela lista, destacar uma seleção e selecionar Detalhes.
61541
Selecionar Detalhes abrirá uma janela que pode ter texto descritivo de falha adicional, dizendo ao operador se a falha écrítica, não crítica e o que fazer sobre a falha.
Manutenção programada do motorSe o lembrete de manutenção for detectado durante uma verificação do sistema, a guia Mercury no canto inferioresquerdo da tela será exibida na cor azul. Use o bom senso para proteger seu investimento e verifique o óleo do motorregularmente, de preferência antes de cada uso.Quando o tempo para a manutenção programada estiver totalmente esgotado, uma pop-up de manutenção apareceráapós a varredura de inicialização. O operador pode fechar a pop-up, mas o lembrete aparecerá a cada tecla ativada dobarco. A confirmação do lembrete de manutenção irá restabelecer o tempo de manutenção no VesselView. Para acessaras informações específicas sobre manutenção programada navegue até a mensagem de texto descritivo de manutençãousando as instruções a seguir. Os usuários podem visualizar a barra de manutenção a qualquer momento para ver ostatus de depleção. Isso pode ajudar na programação de agendamentos futuros com o revendedor, se a manutenção nãofor realizada pelo proprietário.
Seção 1 - Introdução
Página 24 90-8M0122370 por JUNHO 2016
Selecione a guia Mercury no canto inferior esquerdo da tela. Selecione o ícone da Mercury com a palavra MAIS.
61536
Selecione a opção MANUTENÇÃO.
61538
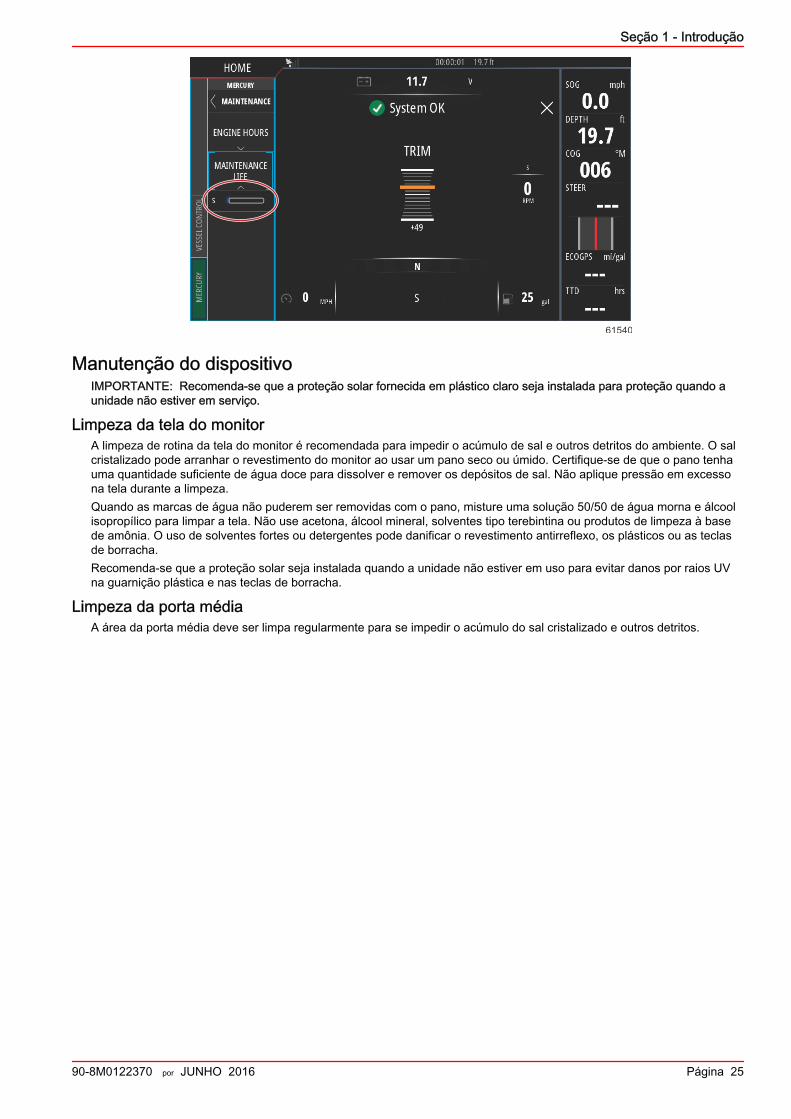
Para exibir o tempo restante antes da manutenção programada, selecione a opção ATIVIDADE DE MANUTENÇÃO.Quanto mais azul ficar a barra de progresso, mais próximo será necessário a manutenção programada.
61539
Seção 1 - Introdução
90-8M0122370 por JUNHO 2016 Página 25
61540
Manutenção do dispositivoIMPORTANTE: Recomenda-se que a proteção solar fornecida em plástico claro seja instalada para proteção quando aunidade não estiver em serviço.
Limpeza da tela do monitorA limpeza de rotina da tela do monitor é recomendada para impedir o acúmulo de sal e outros detritos do ambiente. O salcristalizado pode arranhar o revestimento do monitor ao usar um pano seco ou úmido. Certifique-se de que o pano tenhauma quantidade suficiente de água doce para dissolver e remover os depósitos de sal. Não aplique pressão em excessona tela durante a limpeza.Quando as marcas de água não puderem ser removidas com o pano, misture uma solução 50/50 de água morna e álcoolisopropílico para limpar a tela. Não use acetona, álcool mineral, solventes tipo terebintina ou produtos de limpeza à basede amônia. O uso de solventes fortes ou detergentes pode danificar o revestimento antirreflexo, os plásticos ou as teclasde borracha.Recomenda-se que a proteção solar seja instalada quando a unidade não estiver em uso para evitar danos por raios UVna guarnição plástica e nas teclas de borracha.
Limpeza da porta médiaA área da porta média deve ser limpa regularmente para se impedir o acúmulo do sal cristalizado e outros detritos.

Seção 1 - Introdução
Notas:
Página 26 90-8M0122370 por JUNHO 2016
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 27
Seção 2 - Telas Iniciais e Assistente de ConfiguraçãoÍndiceTela de Consulta para Inicialização do VesselView.......... 28Tela inicial......................................................................... 28Assistente de configuração............................................... 29
Importar Configuração .............................................. 31Configuração do Motor .............................................. 31Configuração do Mostrador ....................................... 34Configuração do Dispositivo ..................................... 35Configuração das unidades ...................................... 35
Configuração do Tanque ........................................... 35Configuração da velocidade ...................................... 37Conclusão do assistente de configuração ................ 38
Configuração da origem de dados.................................... 38Fontes de Dados ....................................................... 38
Ampliação das Telas de Dados........................................ 40Barra de Instrumento........................................................ 42
2
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 28 90-8M0122370 por JUNHO 2016
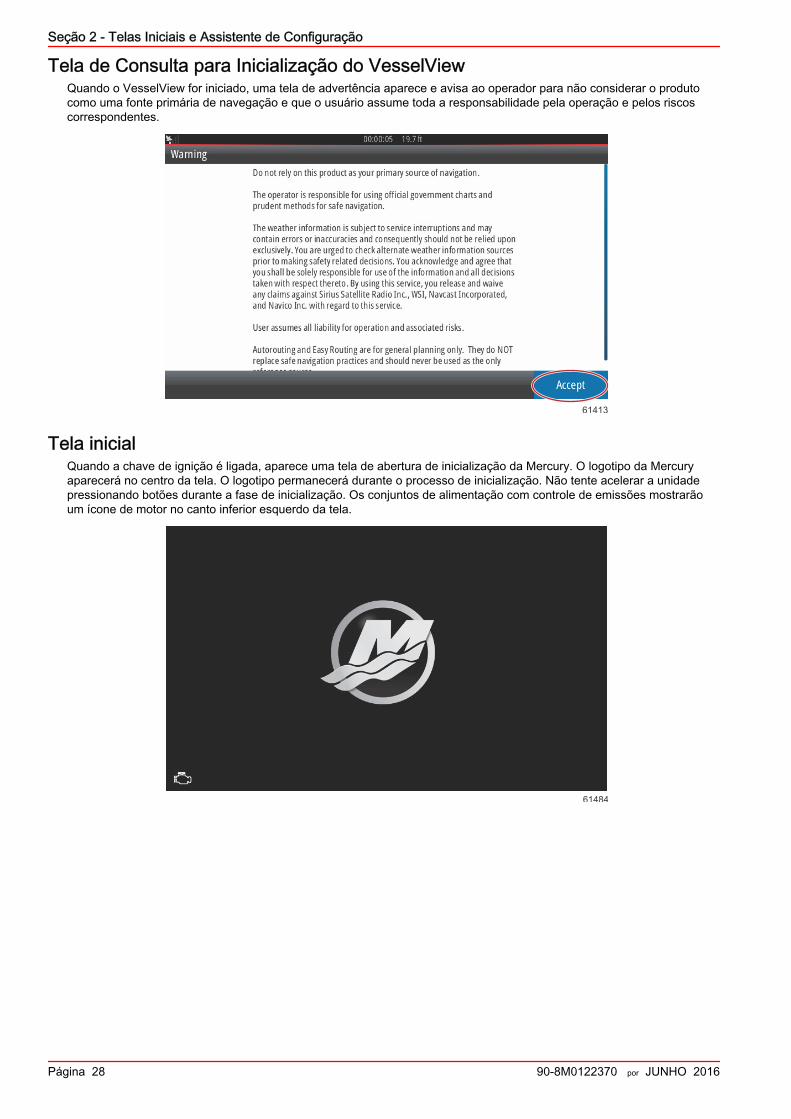
Tela de Consulta para Inicialização do VesselViewQuando o VesselView for iniciado, uma tela de advertência aparece e avisa ao operador para não considerar o produtocomo uma fonte primária de navegação e que o usuário assume toda a responsabilidade pela operação e pelos riscoscorrespondentes.
61413
Tela inicialQuando a chave de ignição é ligada, aparece uma tela de abertura de inicialização da Mercury. O logotipo da Mercuryaparecerá no centro da tela. O logotipo permanecerá durante o processo de inicialização. Não tente acelerar a unidadepressionando botões durante a fase de inicialização. Os conjuntos de alimentação com controle de emissões mostrarãoum ícone de motor no canto inferior esquerdo da tela.
61484
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 29
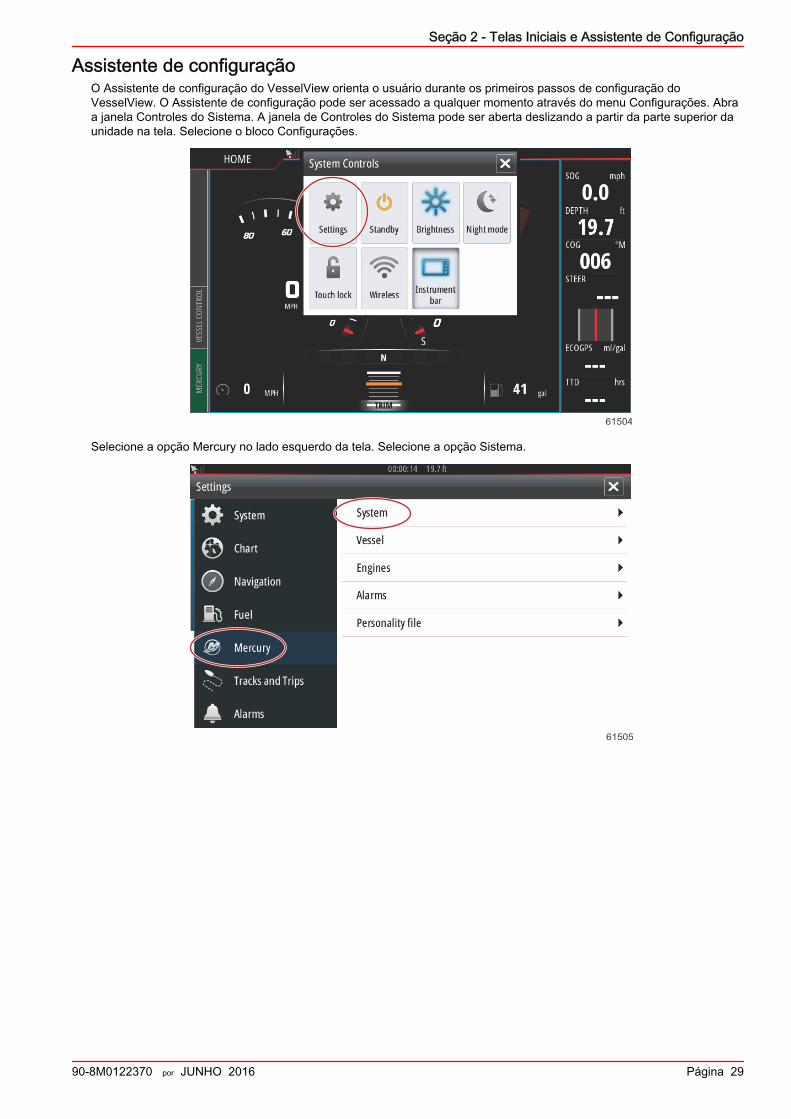
Assistente de configuraçãoO Assistente de configuração do VesselView orienta o usuário durante os primeiros passos de configuração doVesselView. O Assistente de configuração pode ser acessado a qualquer momento através do menu Configurações. Abraa janela Controles do Sistema. A janela de Controles do Sistema pode ser aberta deslizando a partir da parte superior daunidade na tela. Selecione o bloco Configurações.
61504
Selecione a opção Mercury no lado esquerdo da tela. Selecione a opção Sistema.
61505
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 30 90-8M0122370 por JUNHO 2016
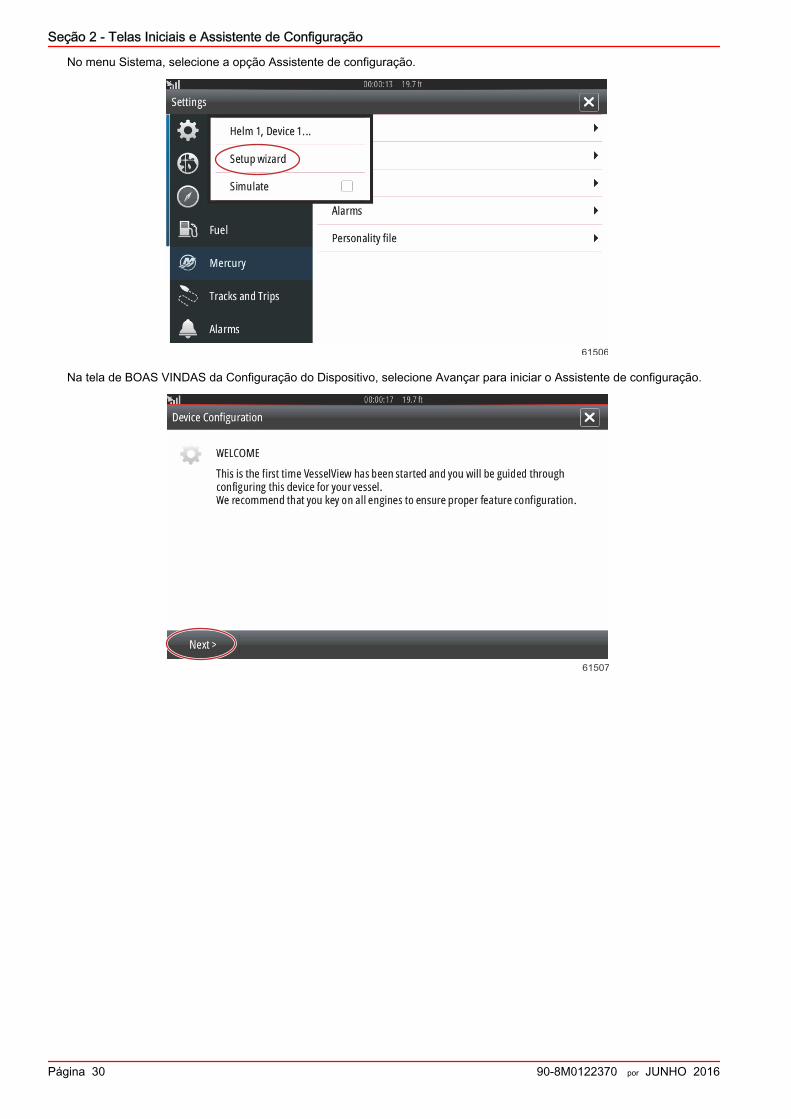
No menu Sistema, selecione a opção Assistente de configuração.
61506
Na tela de BOAS VINDAS da Configuração do Dispositivo, selecione Avançar para iniciar o Assistente de configuração.
61507
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 31
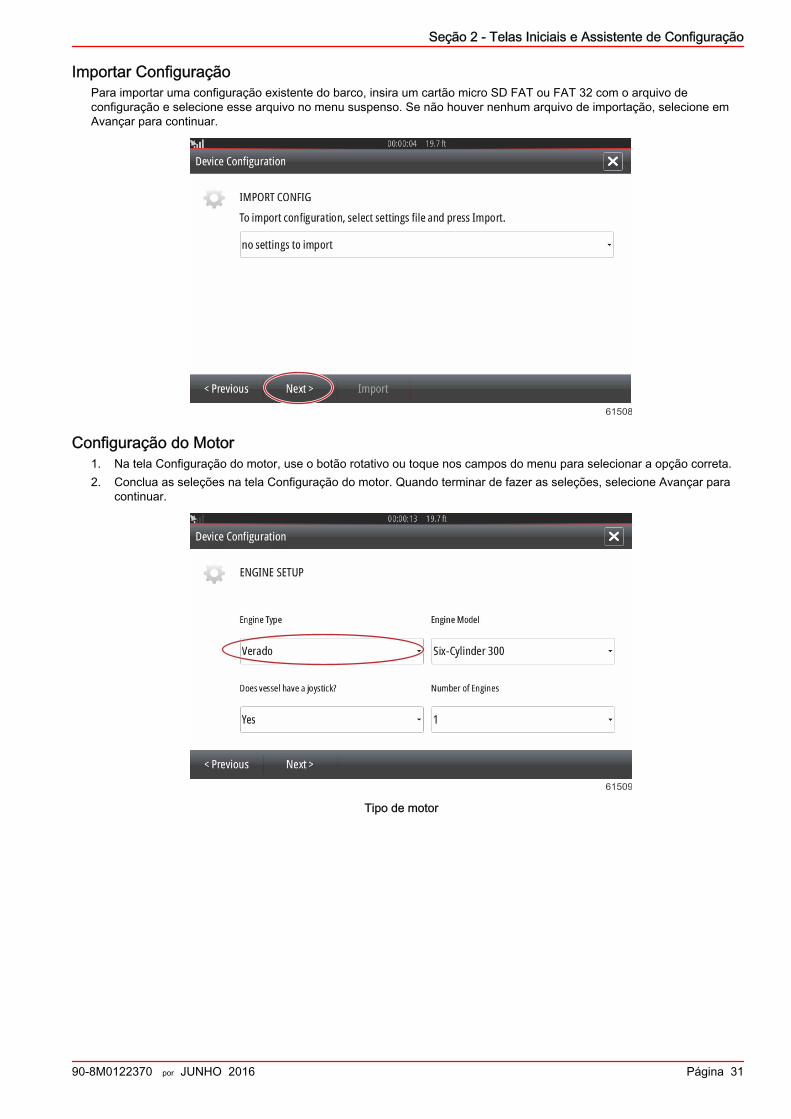
Importar ConfiguraçãoPara importar uma configuração existente do barco, insira um cartão micro SD FAT ou FAT 32 com o arquivo deconfiguração e selecione esse arquivo no menu suspenso. Se não houver nenhum arquivo de importação, selecione emAvançar para continuar.
61508
Configuração do Motor1. Na tela Configuração do motor, use o botão rotativo ou toque nos campos do menu para selecionar a opção correta.2. Conclua as seleções na tela Configuração do motor. Quando terminar de fazer as seleções, selecione Avançar para
continuar.
61509
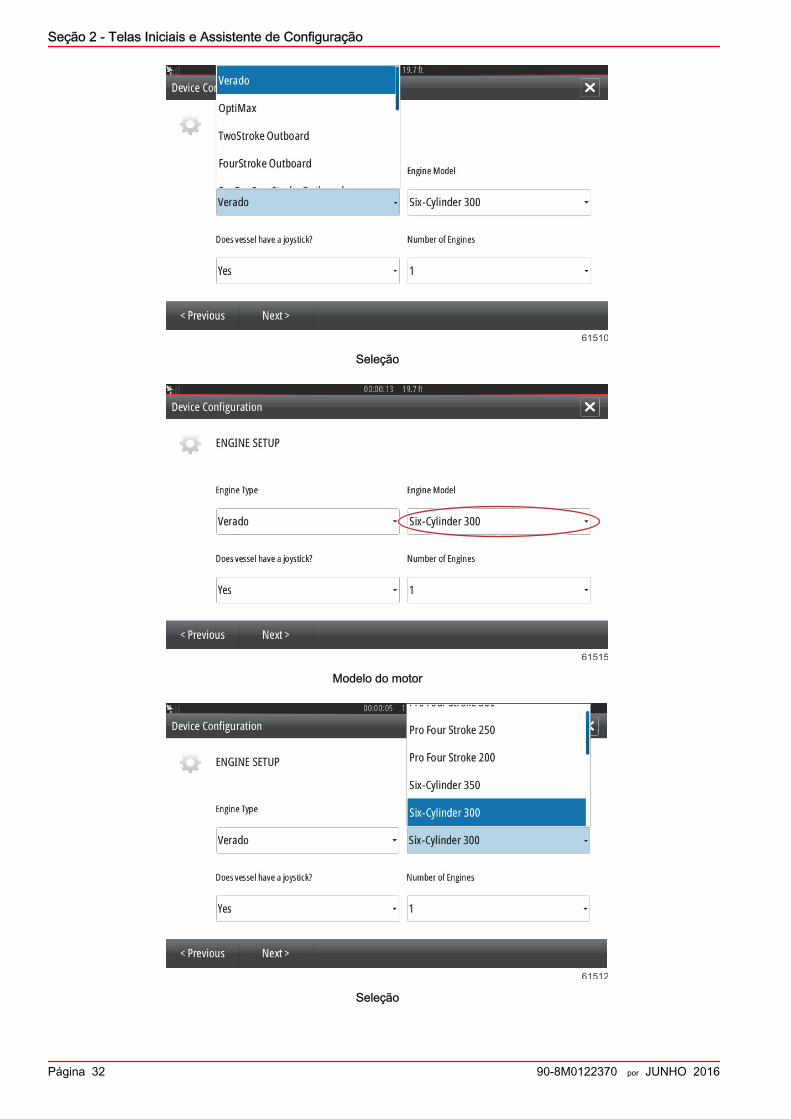
Tipo de motor
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 32 90-8M0122370 por JUNHO 2016
61510
Seleção
61515
Modelo do motor
61512
Seleção
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 33
61516
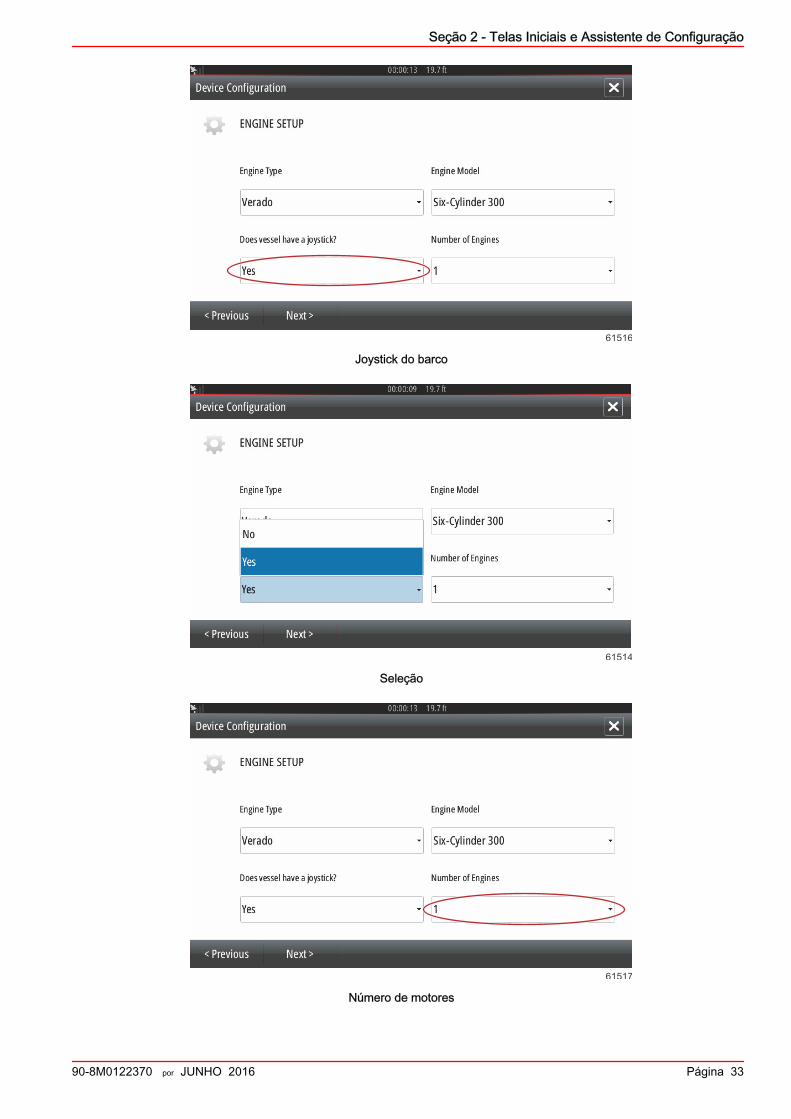
Joystick do barco
61514
Seleção
61517
Número de motores
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 34 90-8M0122370 por JUNHO 2016
61513
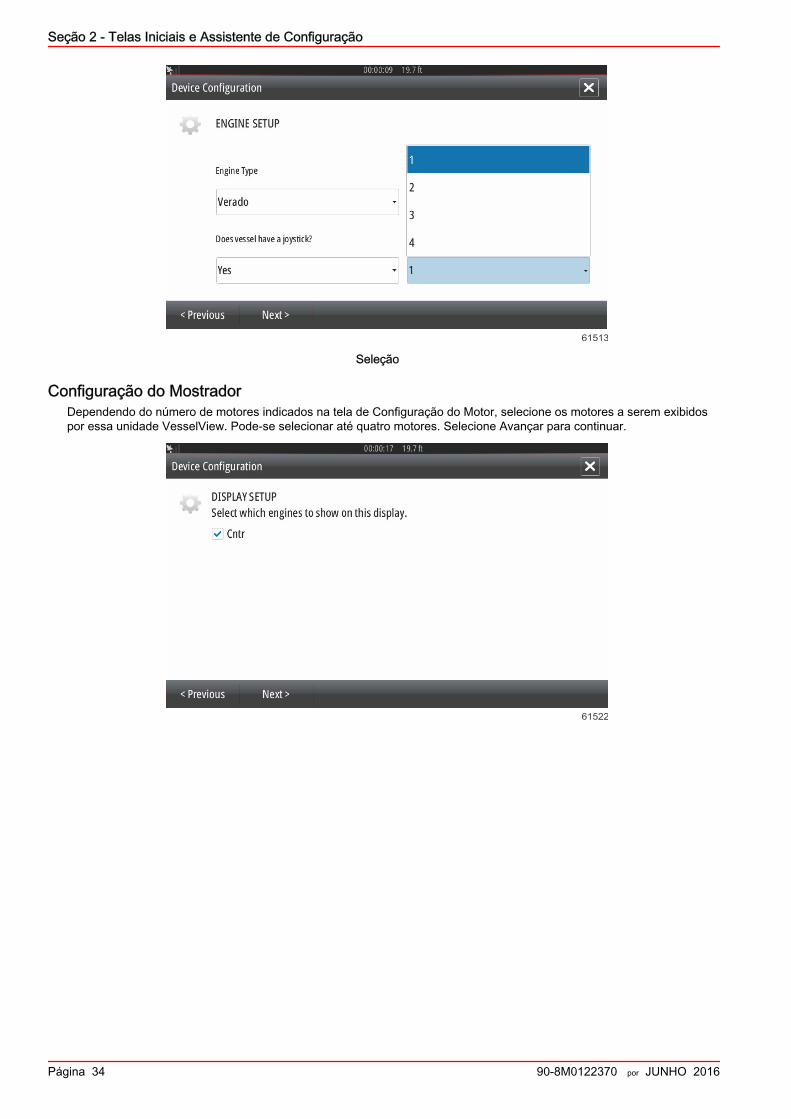
Seleção
Configuração do MostradorDependendo do número de motores indicados na tela de Configuração do Motor, selecione os motores a serem exibidospor essa unidade VesselView. Pode-se selecionar até quatro motores. Selecione Avançar para continuar.
61522
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 35
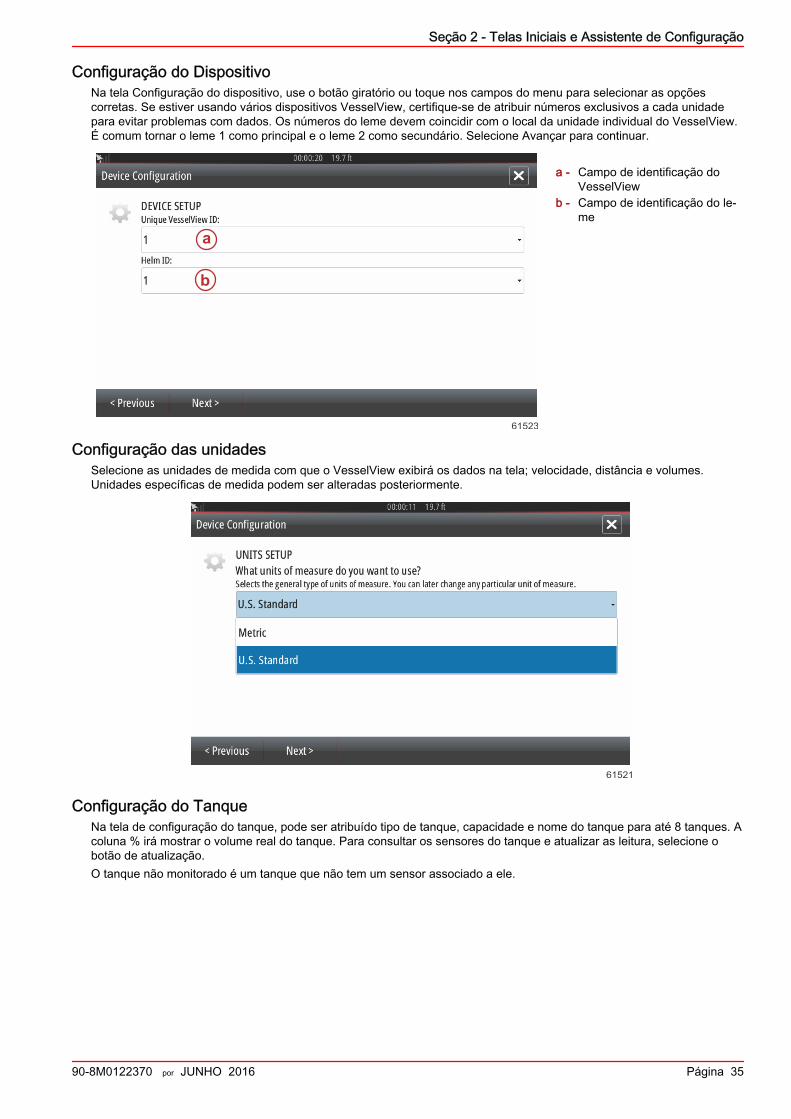
Configuração do DispositivoNa tela Configuração do dispositivo, use o botão giratório ou toque nos campos do menu para selecionar as opçõescorretas. Se estiver usando vários dispositivos VesselView, certifique-se de atribuir números exclusivos a cada unidadepara evitar problemas com dados. Os números do leme devem coincidir com o local da unidade individual do VesselView.É comum tornar o leme 1 como principal e o leme 2 como secundário. Selecione Avançar para continuar.
a - Campo de identificação doVesselView
b - Campo de identificação do le‐me
Configuração das unidadesSelecione as unidades de medida com que o VesselView exibirá os dados na tela; velocidade, distância e volumes.Unidades específicas de medida podem ser alteradas posteriormente.
61521
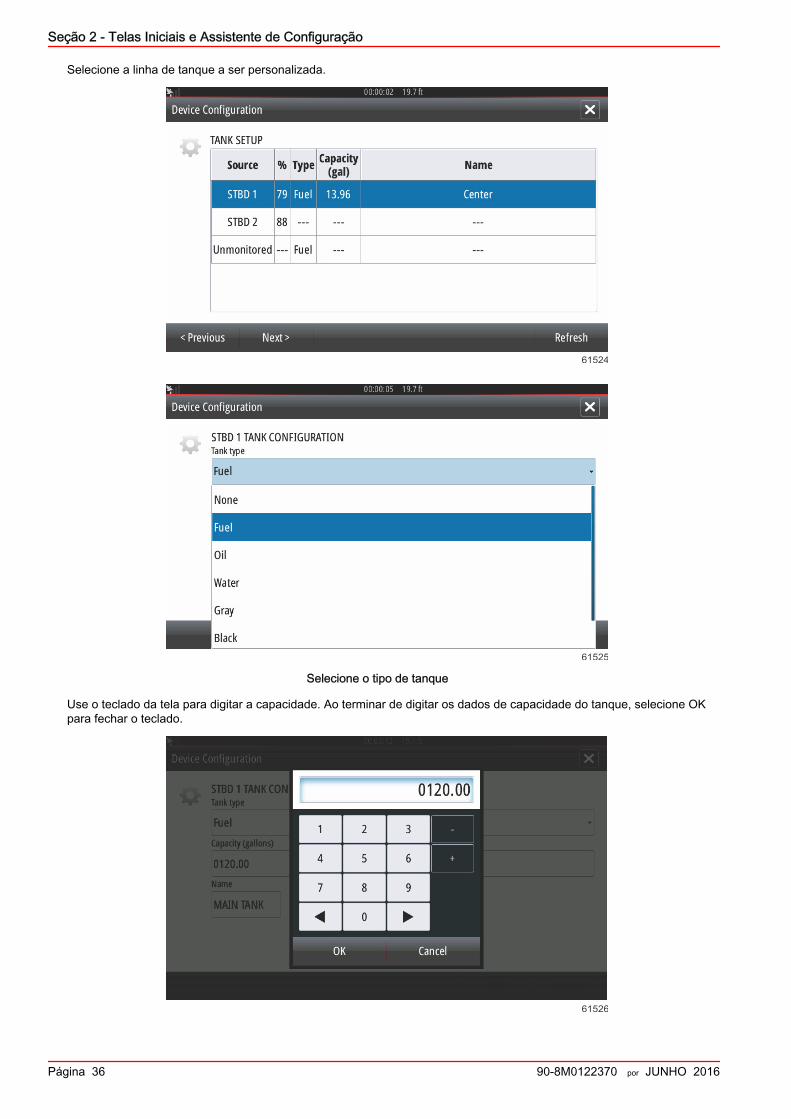
Configuração do TanqueNa tela de configuração do tanque, pode ser atribuído tipo de tanque, capacidade e nome do tanque para até 8 tanques. Acoluna % irá mostrar o volume real do tanque. Para consultar os sensores do tanque e atualizar as leitura, selecione obotão de atualização.O tanque não monitorado é um tanque que não tem um sensor associado a ele.
61523
a
b
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 36 90-8M0122370 por JUNHO 2016
Selecione a linha de tanque a ser personalizada.
61524
61525
Selecione o tipo de tanque
Use o teclado da tela para digitar a capacidade. Ao terminar de digitar os dados de capacidade do tanque, selecione OKpara fechar o teclado.
61526
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 37
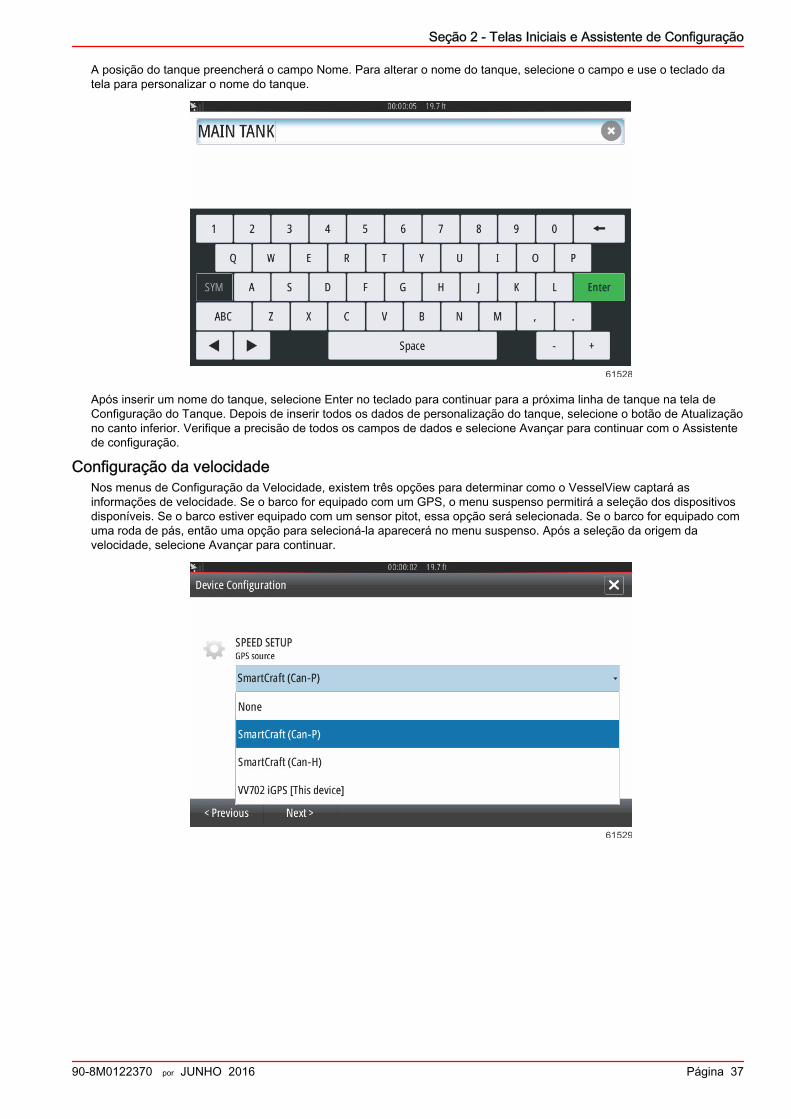
A posição do tanque preencherá o campo Nome. Para alterar o nome do tanque, selecione o campo e use o teclado datela para personalizar o nome do tanque.
61528
Após inserir um nome do tanque, selecione Enter no teclado para continuar para a próxima linha de tanque na tela deConfiguração do Tanque. Depois de inserir todos os dados de personalização do tanque, selecione o botão de Atualizaçãono canto inferior. Verifique a precisão de todos os campos de dados e selecione Avançar para continuar com o Assistentede configuração.
Configuração da velocidadeNos menus de Configuração da Velocidade, existem três opções para determinar como o VesselView captará asinformações de velocidade. Se o barco for equipado com um GPS, o menu suspenso permitirá a seleção dos dispositivosdisponíveis. Se o barco estiver equipado com um sensor pitot, essa opção será selecionada. Se o barco for equipado comuma roda de pás, então uma opção para selecioná-la aparecerá no menu suspenso. Após a seleção da origem davelocidade, selecione Avançar para continuar.
61529
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 38 90-8M0122370 por JUNHO 2016
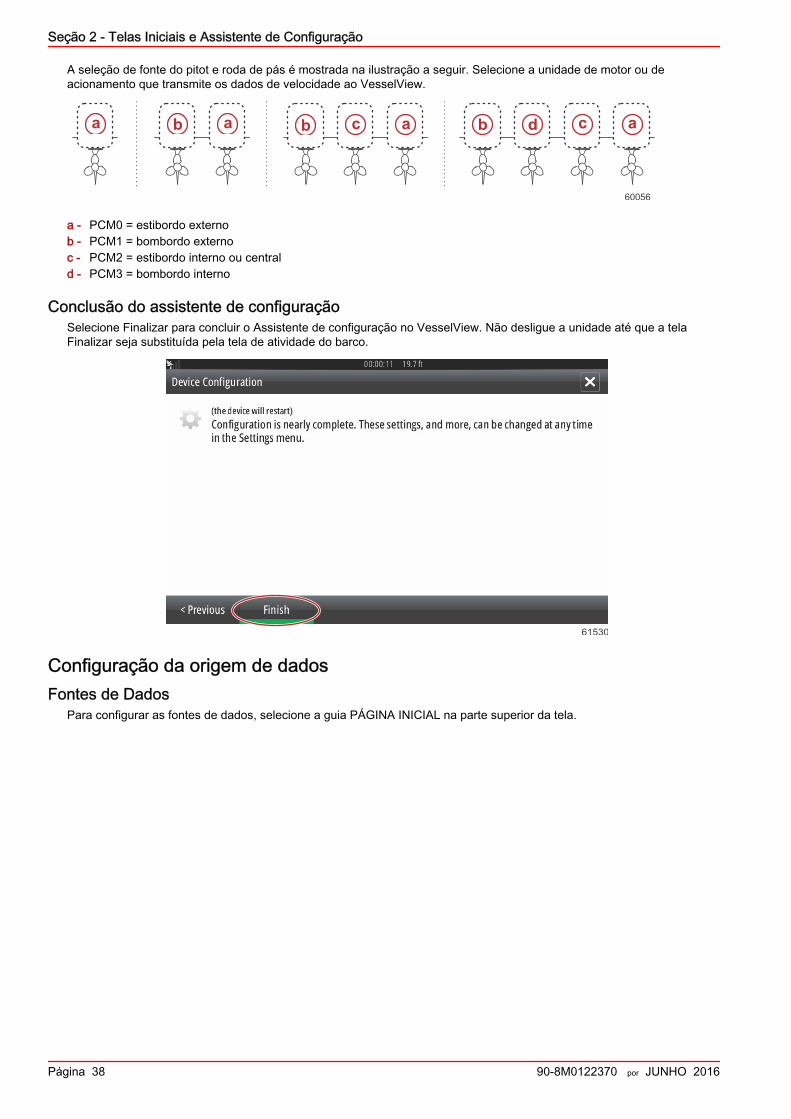
A seleção de fonte do pitot e roda de pás é mostrada na ilustração a seguir. Selecione a unidade de motor ou deacionamento que transmite os dados de velocidade ao VesselView.
a - PCM0 = estibordo externob - PCM1 = bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
Conclusão do assistente de configuraçãoSelecione Finalizar para concluir o Assistente de configuração no VesselView. Não desligue a unidade até que a telaFinalizar seja substituída pela tela de atividade do barco.
61530
Configuração da origem de dadosFontes de Dados
Para configurar as fontes de dados, selecione a guia PÁGINA INICIAL na parte superior da tela.
a a ab b bc cd
60056
a
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 39
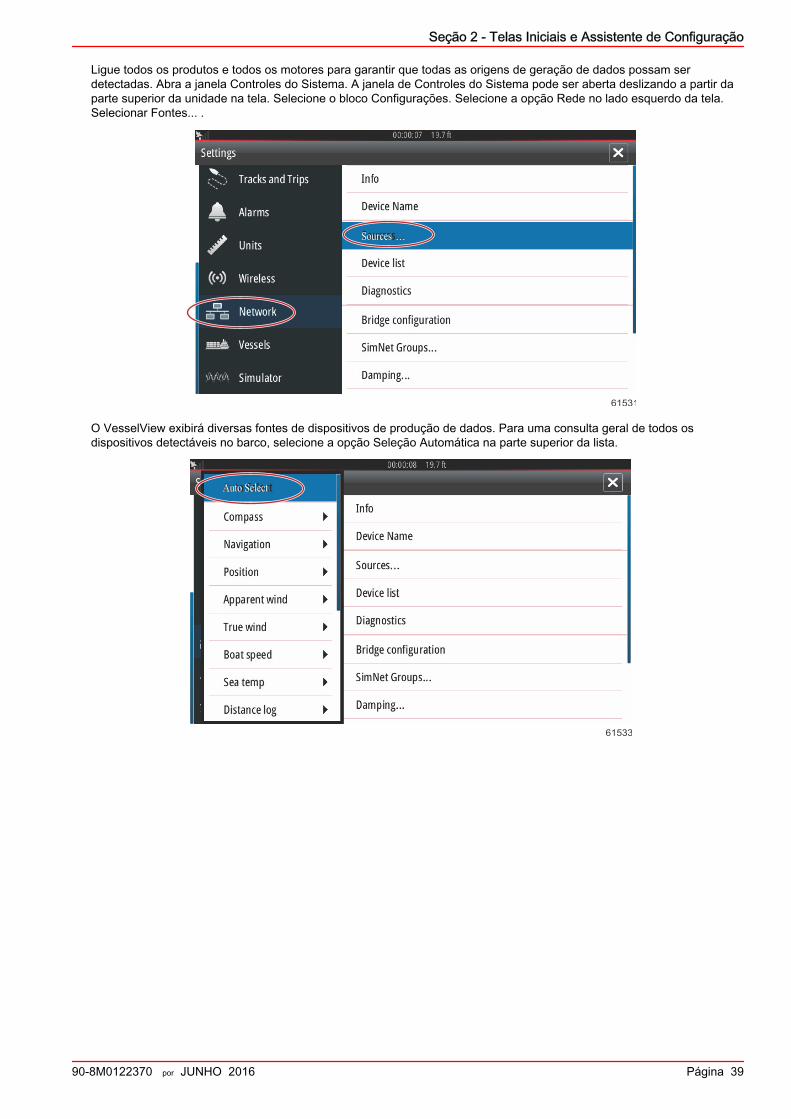
Ligue todos os produtos e todos os motores para garantir que todas as origens de geração de dados possam serdetectadas. Abra a janela Controles do Sistema. A janela de Controles do Sistema pode ser aberta deslizando a partir daparte superior da unidade na tela. Selecione o bloco Configurações. Selecione a opção Rede no lado esquerdo da tela.Selecionar Fontes... .
61531
Sources ...
O VesselView exibirá diversas fontes de dispositivos de produção de dados. Para uma consulta geral de todos osdispositivos detectáveis no barco, selecione a opção Seleção Automática na parte superior da lista.
61533
Auto Select
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 40 90-8M0122370 por JUNHO 2016
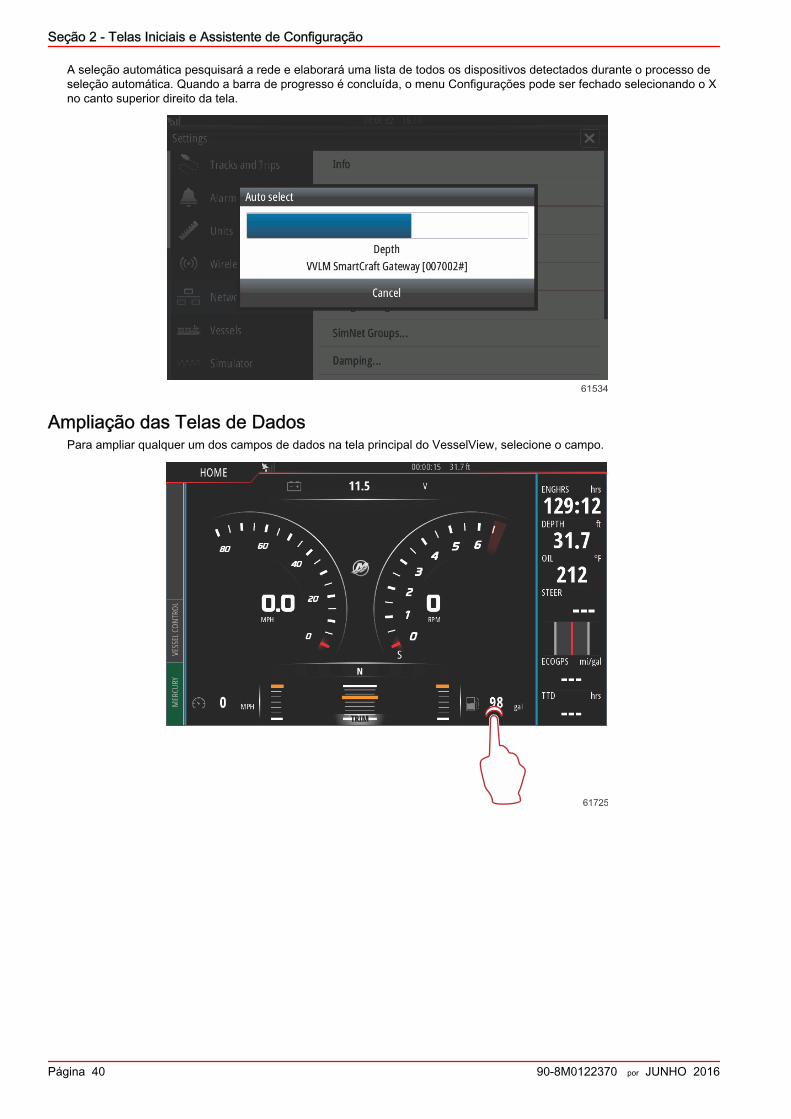
A seleção automática pesquisará a rede e elaborará uma lista de todos os dispositivos detectados durante o processo deseleção automática. Quando a barra de progresso é concluída, o menu Configurações pode ser fechado selecionando o Xno canto superior direito da tela.
61534
Ampliação das Telas de DadosPara ampliar qualquer um dos campos de dados na tela principal do VesselView, selecione o campo.
61725
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 41
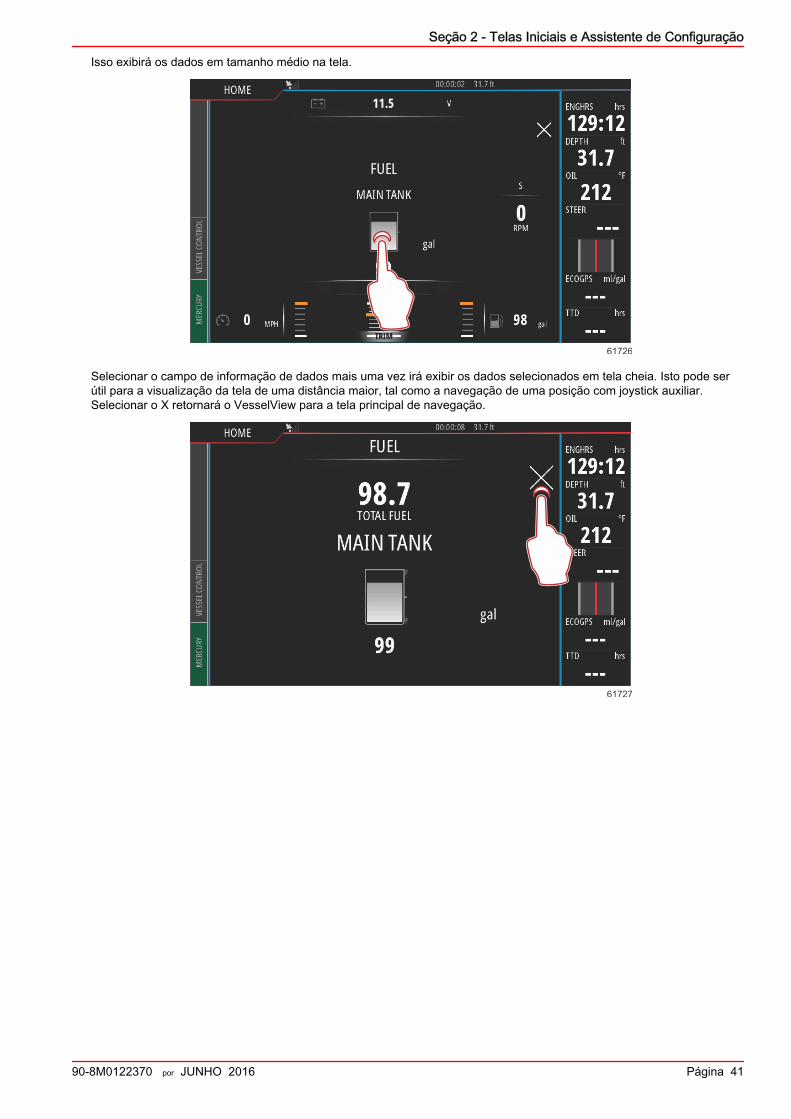
Isso exibirá os dados em tamanho médio na tela.
61726
Selecionar o campo de informação de dados mais uma vez irá exibir os dados selecionados em tela cheia. Isto pode serútil para a visualização da tela de uma distância maior, tal como a navegação de uma posição com joystick auxiliar.Selecionar o X retornará o VesselView para a tela principal de navegação.
61727
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 42 90-8M0122370 por JUNHO 2016
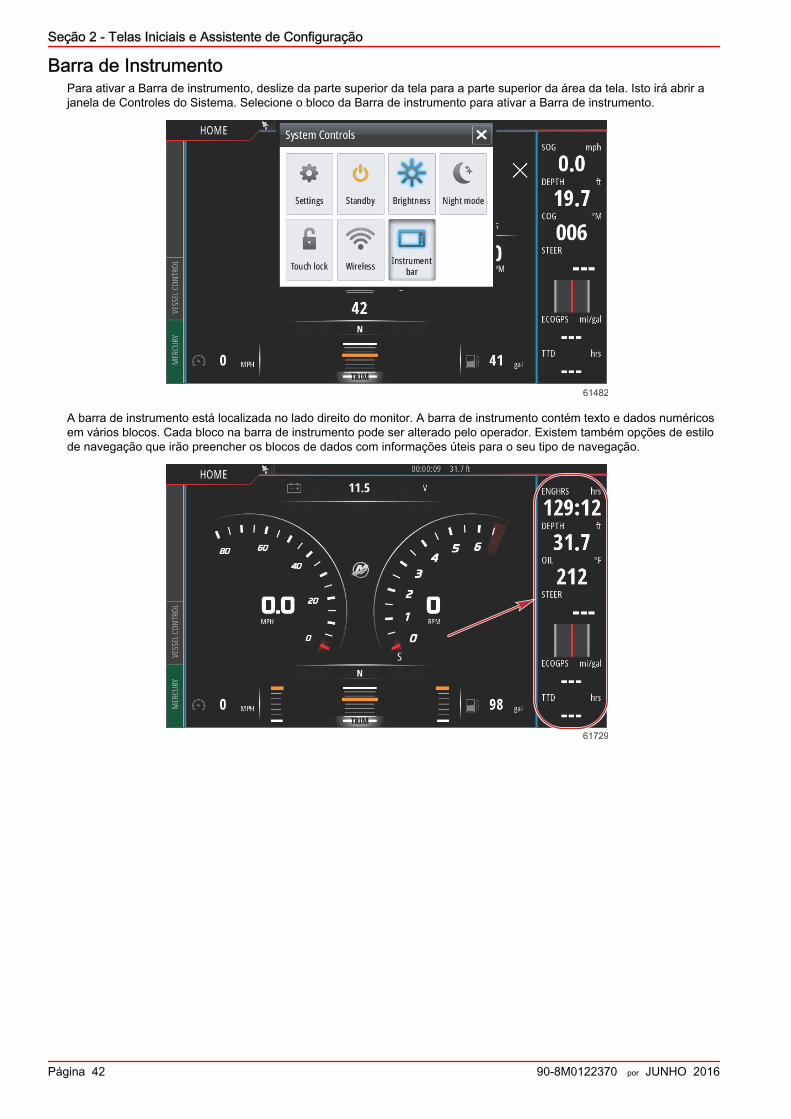
Barra de InstrumentoPara ativar a Barra de instrumento, deslize da parte superior da tela para a parte superior da área da tela. Isto irá abrir ajanela de Controles do Sistema. Selecione o bloco da Barra de instrumento para ativar a Barra de instrumento.
61482
A barra de instrumento está localizada no lado direito do monitor. A barra de instrumento contém texto e dados numéricosem vários blocos. Cada bloco na barra de instrumento pode ser alterado pelo operador. Existem também opções de estilode navegação que irão preencher os blocos de dados com informações úteis para o seu tipo de navegação.
61729
Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 43
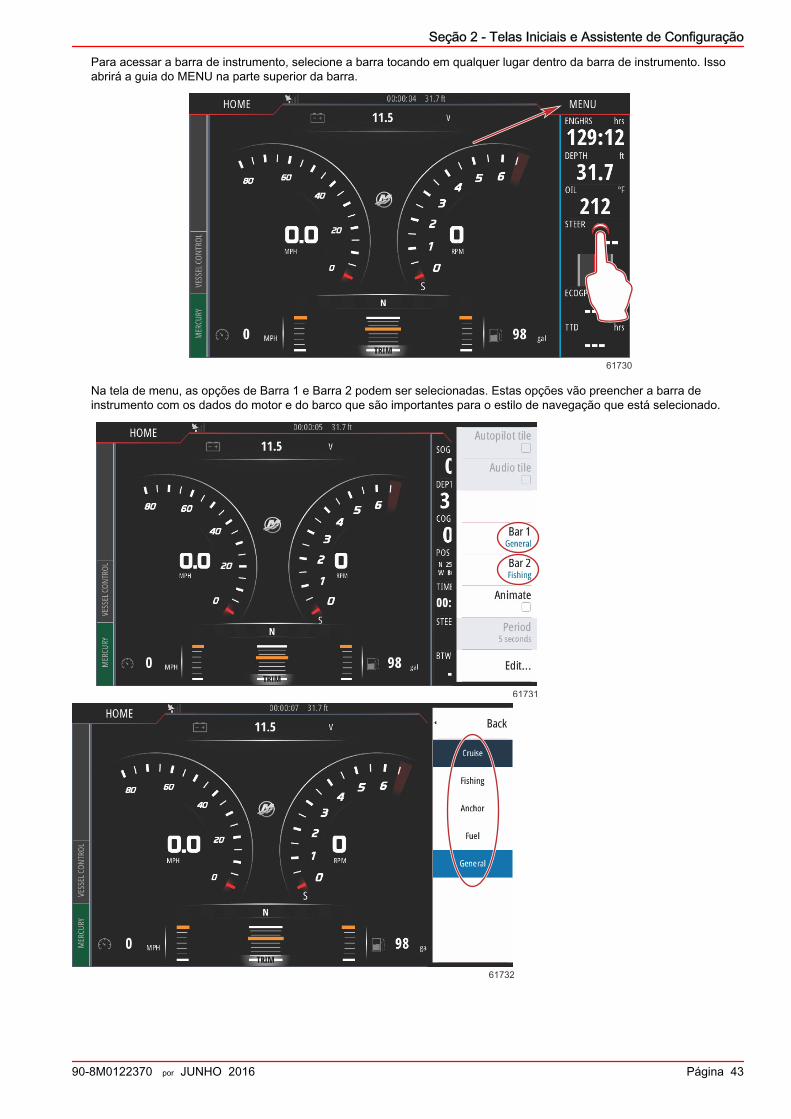
Para acessar a barra de instrumento, selecione a barra tocando em qualquer lugar dentro da barra de instrumento. Issoabrirá a guia do MENU na parte superior da barra.
61730
Na tela de menu, as opções de Barra 1 e Barra 2 podem ser selecionadas. Estas opções vão preencher a barra deinstrumento com os dados do motor e do barco que são importantes para o estilo de navegação que está selecionado.
61731
61732
Seção 2 - Telas Iniciais e Assistente de Configuração
Página 44 90-8M0122370 por JUNHO 2016
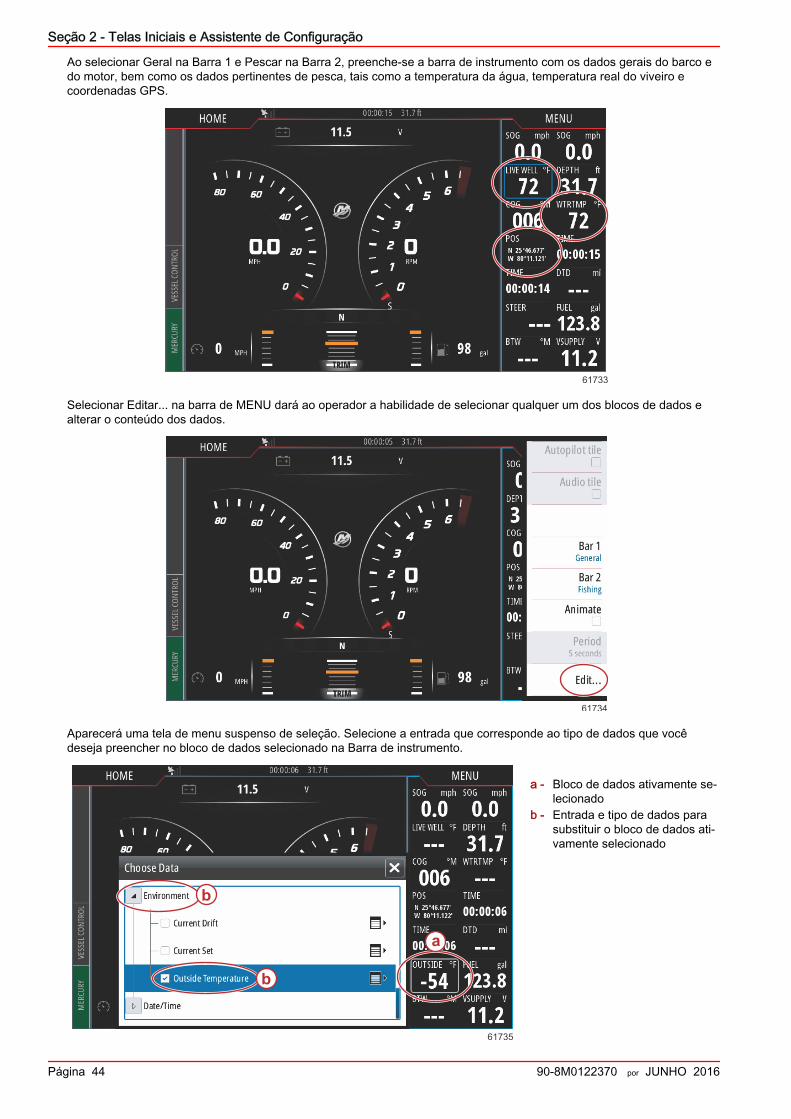
Ao selecionar Geral na Barra 1 e Pescar na Barra 2, preenche-se a barra de instrumento com os dados gerais do barco edo motor, bem como os dados pertinentes de pesca, tais como a temperatura da água, temperatura real do viveiro ecoordenadas GPS.
61733
Selecionar Editar... na barra de MENU dará ao operador a habilidade de selecionar qualquer um dos blocos de dados ealterar o conteúdo dos dados.
61734
Aparecerá uma tela de menu suspenso de seleção. Selecione a entrada que corresponde ao tipo de dados que vocêdeseja preencher no bloco de dados selecionado na Barra de instrumento.
a - Bloco de dados ativamente se‐lecionado
b - Entrada e tipo de dados parasubstituir o bloco de dados ati‐vamente selecionado
61735
a
b
b

Seção 2 - Telas Iniciais e Assistente de Configuração
90-8M0122370 por JUNHO 2016 Página 45
Use este procedimento para concluir a personalização da barra de instrumento.Quando as duas barras de instrumentos estiverem ativas na tela, a tela principal aparecerá menor. Para diminuir otamanho da barra de instrumento, o operador pode selecionar a opção Animar. Isto retornará a barra de instrumento parauma coluna de dados exibida durante a variação entre as seleções definidas da Barra 1 e Barra 2 pelos dois operadores.Quando é selecionada a opção Animar, aparece uma janela de teclado. Uma duração do período de Animação pode serdefinida para até 10 segundos entre a variação dos dados. Use o teclado para digitar uma duração preferida emsegundos. Quando terminar de digitar um valor no teclado, selecione OK para retornar à tela principal.
61740
61737

Seção 2 - Telas Iniciais e Assistente de Configuração
Notas:
Página 46 90-8M0122370 por JUNHO 2016

Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 47
Seção 3 - Recursos e Operação do piloto automáticoÍndiceModo Econômico.............................................................. 48
ECO............................................................................ 48Modo SmartTow................................................................ 51
Smart Tow (Reboque inteligente)............................... 51Características ................................................... 51Desativar o Smart Tow ....................................... 54
Modo de Controle de Cruzeiro.......................................... 54Controle Cruise (Cruzeiro)......................................... 54
Ativação do modo de controle de cruzeiro ......... 54Modo de Controle de Marcha Lenta de Pesca.................. 56
Controle de marcha lenta pesca................................ 56 3
Seção 3 - Recursos e Operação do piloto automático
Página 48 90-8M0122370 por JUNHO 2016
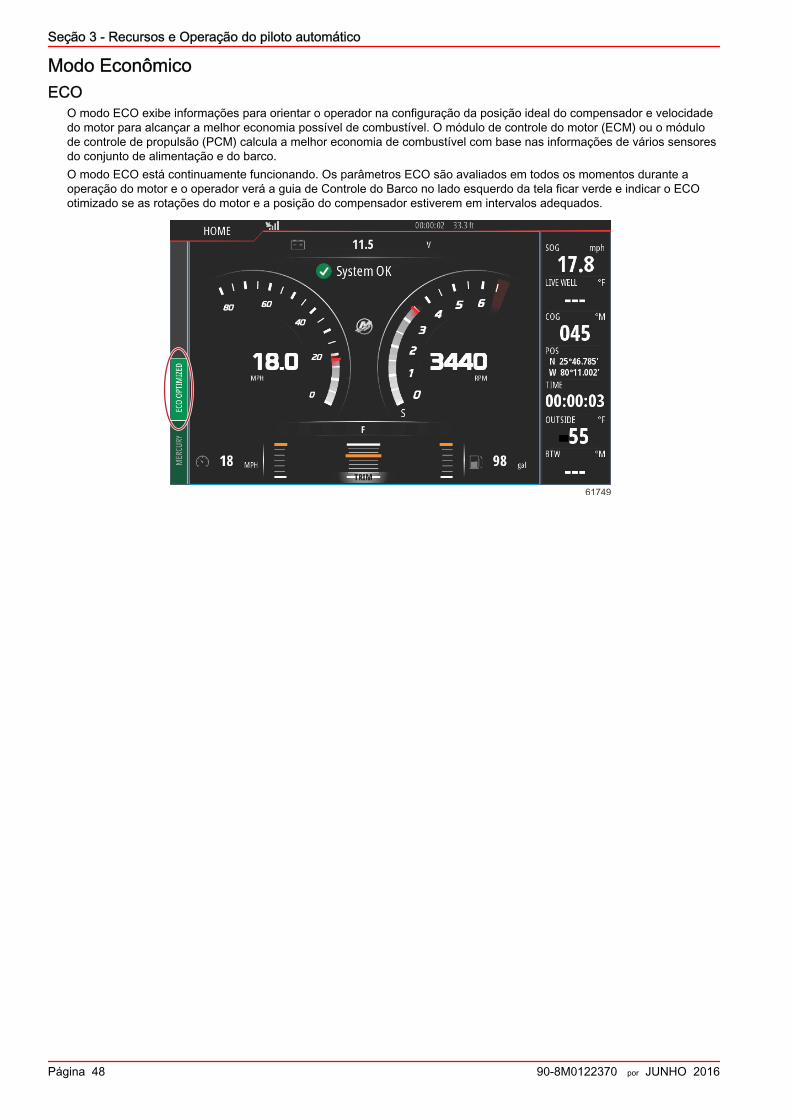
Modo EconômicoECO
O modo ECO exibe informações para orientar o operador na configuração da posição ideal do compensador e velocidadedo motor para alcançar a melhor economia possível de combustível. O módulo de controle do motor (ECM) ou o módulode controle de propulsão (PCM) calcula a melhor economia de combustível com base nas informações de vários sensoresdo conjunto de alimentação e do barco.O modo ECO está continuamente funcionando. Os parâmetros ECO são avaliados em todos os momentos durante aoperação do motor e o operador verá a guia de Controle do Barco no lado esquerdo da tela ficar verde e indicar o ECOotimizado se as rotações do motor e a posição do compensador estiverem em intervalos adequados.
61749
Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 49
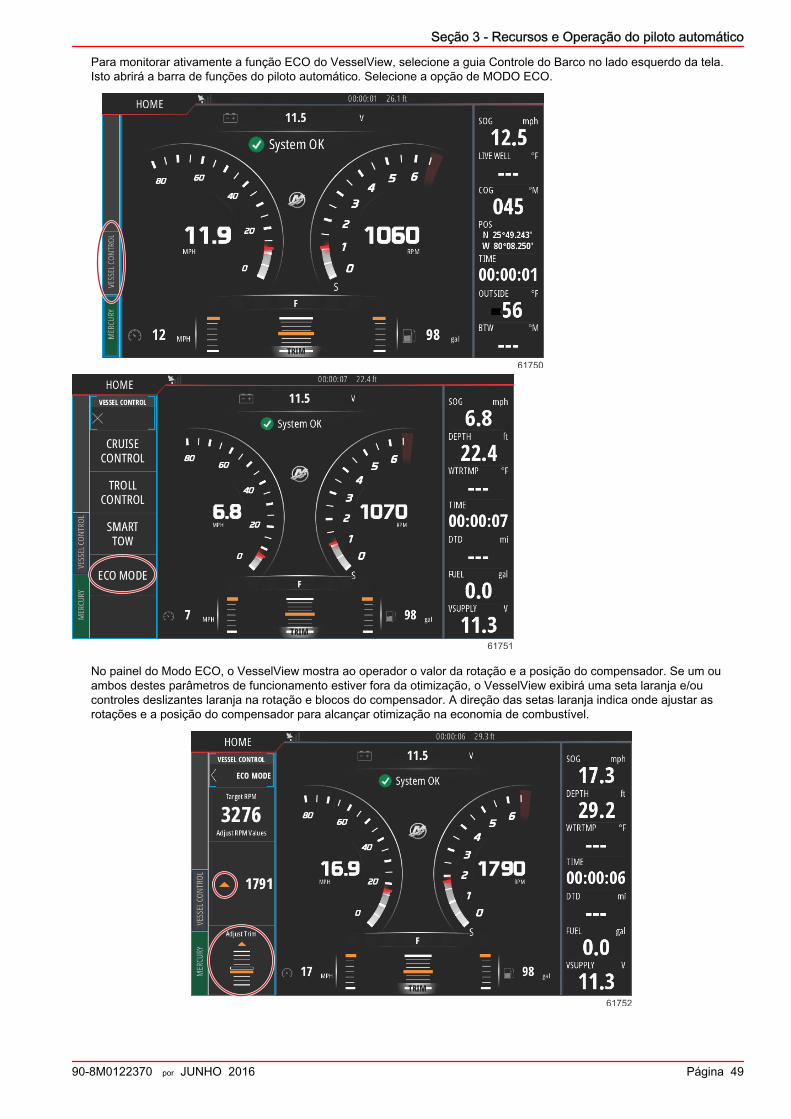
Para monitorar ativamente a função ECO do VesselView, selecione a guia Controle do Barco no lado esquerdo da tela.Isto abrirá a barra de funções do piloto automático. Selecione a opção de MODO ECO.
61750
61751
No painel do Modo ECO, o VesselView mostra ao operador o valor da rotação e a posição do compensador. Se um ouambos destes parâmetros de funcionamento estiver fora da otimização, o VesselView exibirá uma seta laranja e/oucontroles deslizantes laranja na rotação e blocos do compensador. A direção das setas laranja indica onde ajustar asrotações e a posição do compensador para alcançar otimização na economia de combustível.
61752
Seção 3 - Recursos e Operação do piloto automático
Página 50 90-8M0122370 por JUNHO 2016
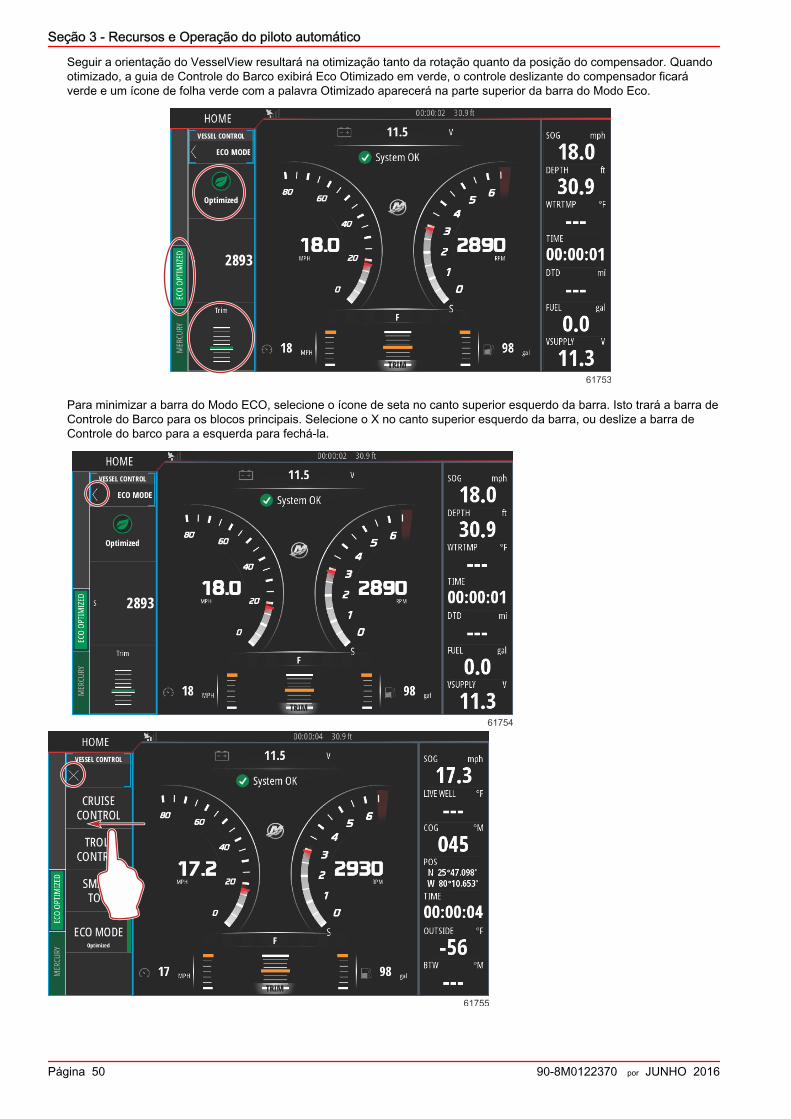
Seguir a orientação do VesselView resultará na otimização tanto da rotação quanto da posição do compensador. Quandootimizado, a guia de Controle do Barco exibirá Eco Otimizado em verde, o controle deslizante do compensador ficaráverde e um ícone de folha verde com a palavra Otimizado aparecerá na parte superior da barra do Modo Eco.
61753
Para minimizar a barra do Modo ECO, selecione o ícone de seta no canto superior esquerdo da barra. Isto trará a barra deControle do Barco para os blocos principais. Selecione o X no canto superior esquerdo da barra, ou deslize a barra deControle do barco para a esquerda para fechá-la.
61754
61755
Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 51
Modo SmartTowSmart Tow (Reboque inteligente)
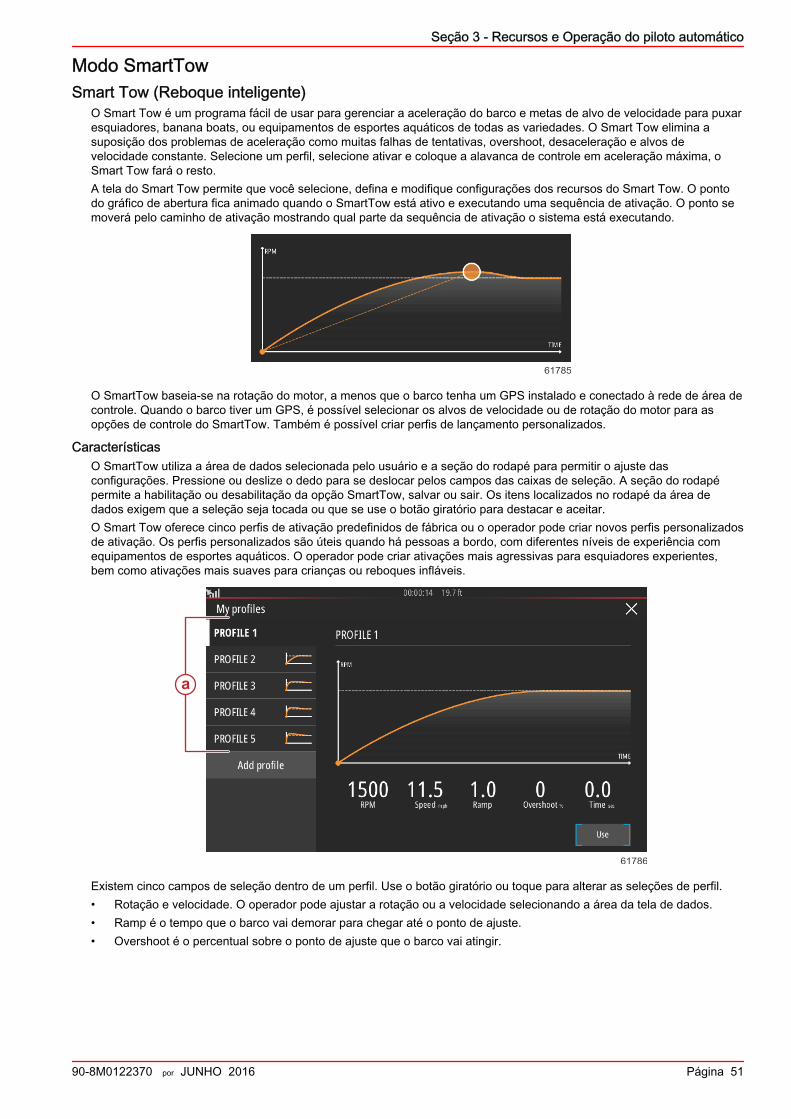
O Smart Tow é um programa fácil de usar para gerenciar a aceleração do barco e metas de alvo de velocidade para puxaresquiadores, banana boats, ou equipamentos de esportes aquáticos de todas as variedades. O Smart Tow elimina asuposição dos problemas de aceleração como muitas falhas de tentativas, overshoot, desaceleração e alvos develocidade constante. Selecione um perfil, selecione ativar e coloque a alavanca de controle em aceleração máxima, oSmart Tow fará o resto.A tela do Smart Tow permite que você selecione, defina e modifique configurações dos recursos do Smart Tow. O pontodo gráfico de abertura fica animado quando o SmartTow está ativo e executando uma sequência de ativação. O ponto semoverá pelo caminho de ativação mostrando qual parte da sequência de ativação o sistema está executando.
61785
O SmartTow baseia-se na rotação do motor, a menos que o barco tenha um GPS instalado e conectado à rede de área decontrole. Quando o barco tiver um GPS, é possível selecionar os alvos de velocidade ou de rotação do motor para asopções de controle do SmartTow. Também é possível criar perfis de lançamento personalizados.
CaracterísticasO SmartTow utiliza a área de dados selecionada pelo usuário e a seção do rodapé para permitir o ajuste dasconfigurações. Pressione ou deslize o dedo para se deslocar pelos campos das caixas de seleção. A seção do rodapépermite a habilitação ou desabilitação da opção SmartTow, salvar ou sair. Os itens localizados no rodapé da área dedados exigem que a seleção seja tocada ou que se use o botão giratório para destacar e aceitar.O Smart Tow oferece cinco perfis de ativação predefinidos de fábrica ou o operador pode criar novos perfis personalizadosde ativação. Os perfis personalizados são úteis quando há pessoas a bordo, com diferentes níveis de experiência comequipamentos de esportes aquáticos. O operador pode criar ativações mais agressivas para esquiadores experientes,bem como ativações mais suaves para crianças ou reboques infláveis.
61786
a
Existem cinco campos de seleção dentro de um perfil. Use o botão giratório ou toque para alterar as seleções de perfil.• Rotação e velocidade. O operador pode ajustar a rotação ou a velocidade selecionando a área da tela de dados.• Ramp é o tempo que o barco vai demorar para chegar até o ponto de ajuste.• Overshoot é o percentual sobre o ponto de ajuste que o barco vai atingir.
Seção 3 - Recursos e Operação do piloto automático
Página 52 90-8M0122370 por JUNHO 2016
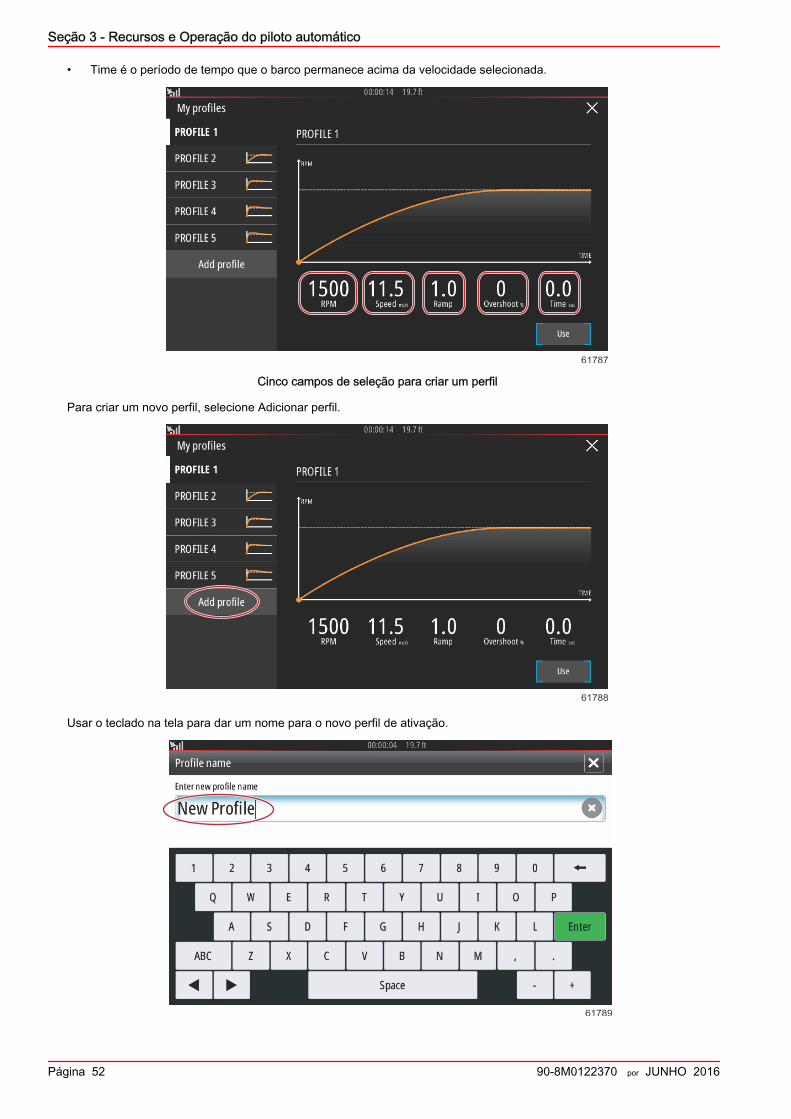
• Time é o período de tempo que o barco permanece acima da velocidade selecionada.
61787
Cinco campos de seleção para criar um perfil
Para criar um novo perfil, selecione Adicionar perfil.
61788
Usar o teclado na tela para dar um nome para o novo perfil de ativação.
61789
Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 53
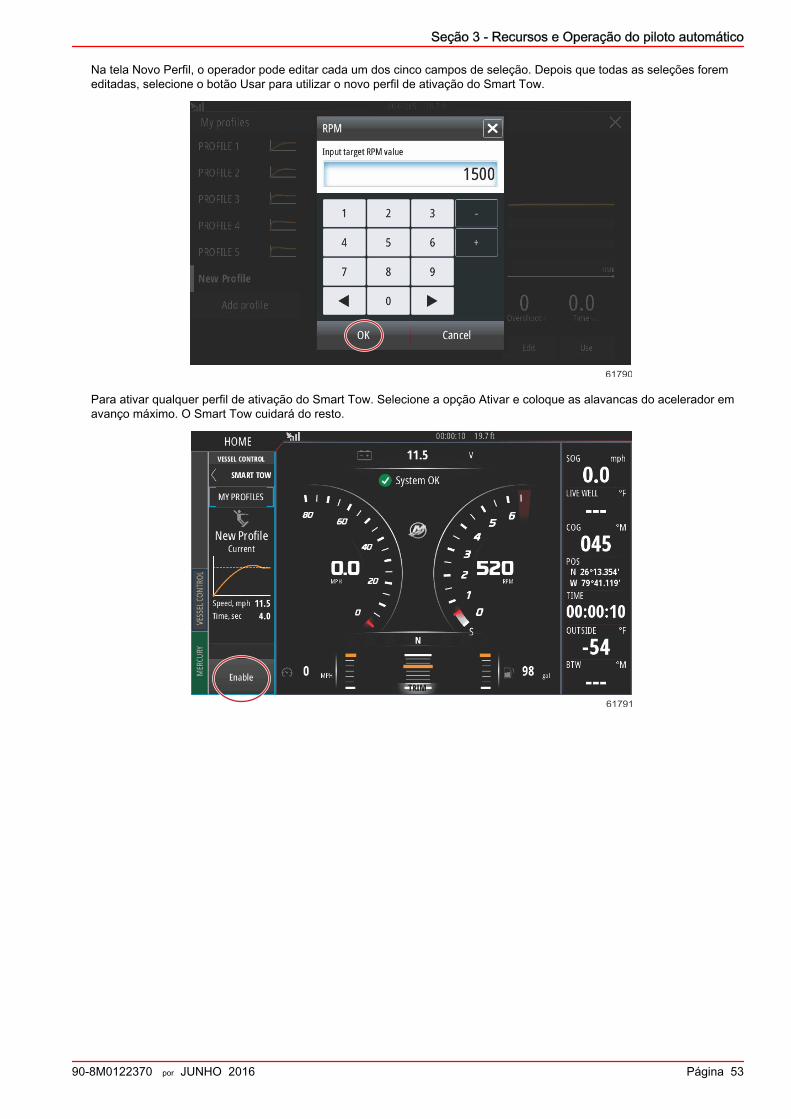
Na tela Novo Perfil, o operador pode editar cada um dos cinco campos de seleção. Depois que todas as seleções foremeditadas, selecione o botão Usar para utilizar o novo perfil de ativação do Smart Tow.
61790
Para ativar qualquer perfil de ativação do Smart Tow. Selecione a opção Ativar e coloque as alavancas do acelerador emavanço máximo. O Smart Tow cuidará do resto.
61791

Seção 3 - Recursos e Operação do piloto automático
Página 54 90-8M0122370 por JUNHO 2016
Desativar o Smart TowPara sair do Smart Tow, selecione Desativar. O VesselView transferirá o controle do acelerador de volta para o operador.Quando o Smart Tow estiver ativado, mover a alavanca do acelerador para qualquer ponto abaixo da meta de velocidadeirá diminuir a velocidade do barco, mas a velocidade máxima do barco não vai aumentar além da meta de velocidade.
61792
Modo de Controle de CruzeiroControle Cruise (Cruzeiro)
O recurso de cruzeiro permite que o operador selecione um ponto de ajuste e regule o valor de modo que o barcomantenha uma velocidade ou uma rotação específica do motor.• O cruzeiro baseia-se na rotação, a menos que o barco tenha um GPS Mercury Marine incorporado na rede de área de
controle.• Se o barco tiver um GPS Mercury Marine, a configuração padrão e a velocidade do barco.• O operador pode selecionar os pontos de ajuste de rotação ou os pontos de ajuste baseados na velocidade. O tipo de
opção de cruzeiro pode ser alterado no menu Configurações.NOTA: O controle de cruzeiro pode ser desabilitado colocando-se as alavancas do controle remoto em ponto morto.
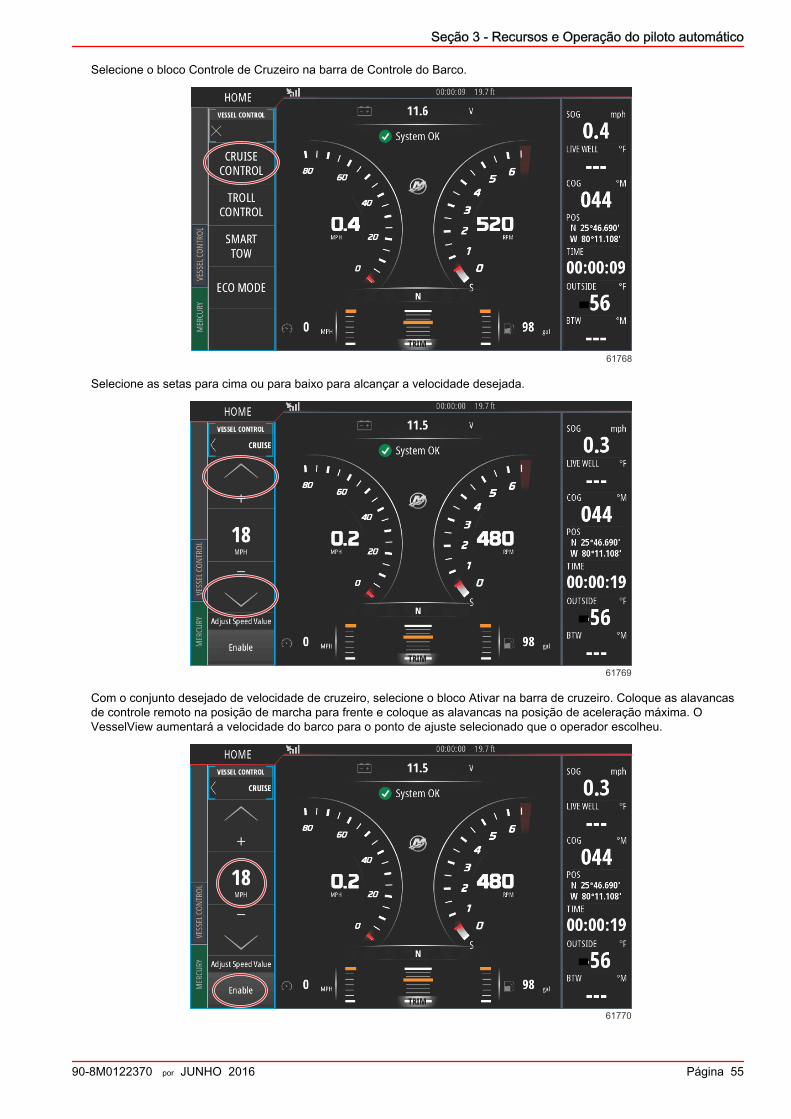
Ativação do modo de controle de cruzeiroPara ativar a opção piloto automático de Cruzeiro, selecione a guia de Controle do Barco do lado esquerdo da tela.
61767
Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 55
Selecione o bloco Controle de Cruzeiro na barra de Controle do Barco.
61768
Selecione as setas para cima ou para baixo para alcançar a velocidade desejada.
61769
Com o conjunto desejado de velocidade de cruzeiro, selecione o bloco Ativar na barra de cruzeiro. Coloque as alavancasde controle remoto na posição de marcha para frente e coloque as alavancas na posição de aceleração máxima. OVesselView aumentará a velocidade do barco para o ponto de ajuste selecionado que o operador escolheu.
61770

Seção 3 - Recursos e Operação do piloto automático
Página 56 90-8M0122370 por JUNHO 2016
Quando Cruzeiro estiver ativo, a guia de Controle do Barco ficará laranja alertando o operador que o barco está em ummodo de controle com piloto automático.
61771
O modo Controle de Cruzeiro pode ser cancelado colocando as alavancas de controle remoto na posição neutra ouselecionando o bloco desativado na parte inferior da barra de Controle de Cruzeiro. Para acessar o bloco Desativar,selecione a guia de Controle do Barco do lado esquerdo da tela, isso abrirá a barra de Controle de Cruzeiro e a opçãoDesativar.
Modo de Controle de Marcha Lenta de PescaControle de marcha lenta pesca
As faixas de rotação de Marcha Lenta de Pesca têm um conjunto de alimentação dependente, mas as rotações máximaspara todos os motores e motores de popa é de 1000 RPM.Para ativar o Controle de Marcha Lenta de Pesca, selecione a guia de Controle do Barco do lado esquerdo da tela.
61757

Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 57
Selecione o bloco de Controle de Marcha Lenta de Pesca na Barra de Controle do Barco.
61758
O barco deve estar engrenado e o acelerador deve estar em marcha lenta. Se o barco não satisfizer estas condições, umícone de aviso e texto de acompanhamento instruirão o operador sobre como tornar disponível o Controle de MarchaLenta de Pesca.
61759
Seção 3 - Recursos e Operação do piloto automático
Página 58 90-8M0122370 por JUNHO 2016
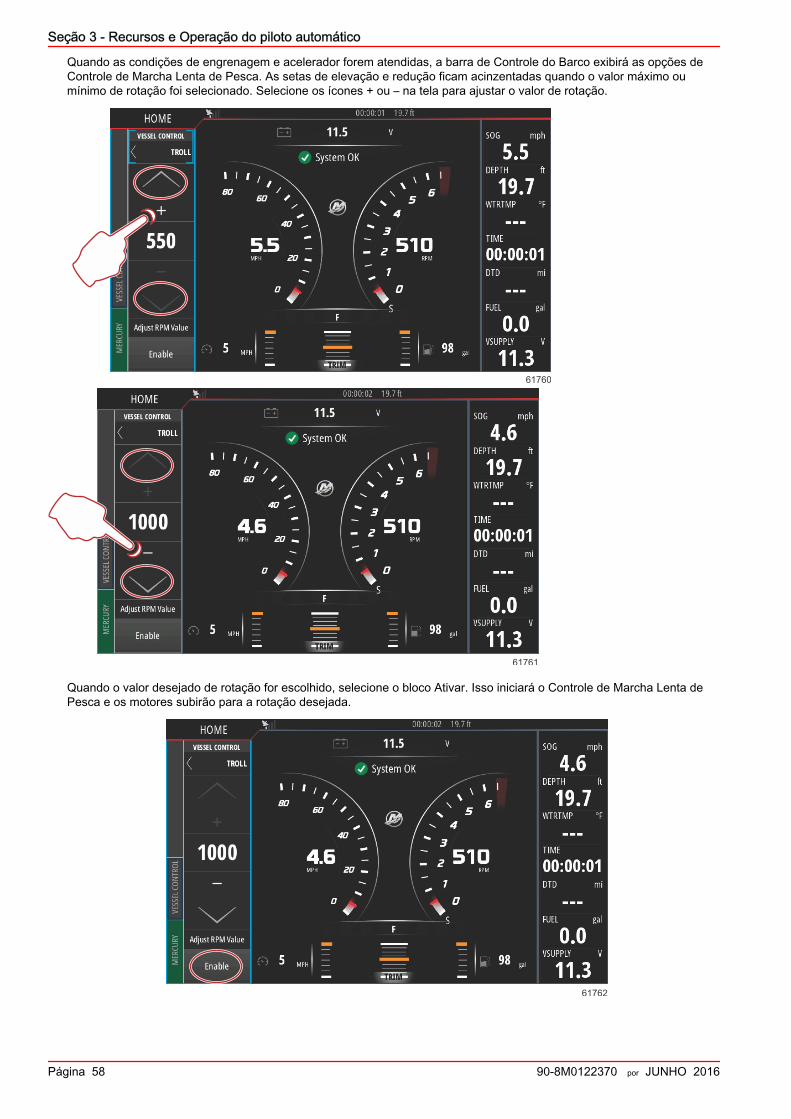
Quando as condições de engrenagem e acelerador forem atendidas, a barra de Controle do Barco exibirá as opções deControle de Marcha Lenta de Pesca. As setas de elevação e redução ficam acinzentadas quando o valor máximo oumínimo de rotação foi selecionado. Selecione os ícones + ou – na tela para ajustar o valor de rotação.
61760
61761
Quando o valor desejado de rotação for escolhido, selecione o bloco Ativar. Isso iniciará o Controle de Marcha Lenta dePesca e os motores subirão para a rotação desejada.
61762
Seção 3 - Recursos e Operação do piloto automático
90-8M0122370 por JUNHO 2016 Página 59
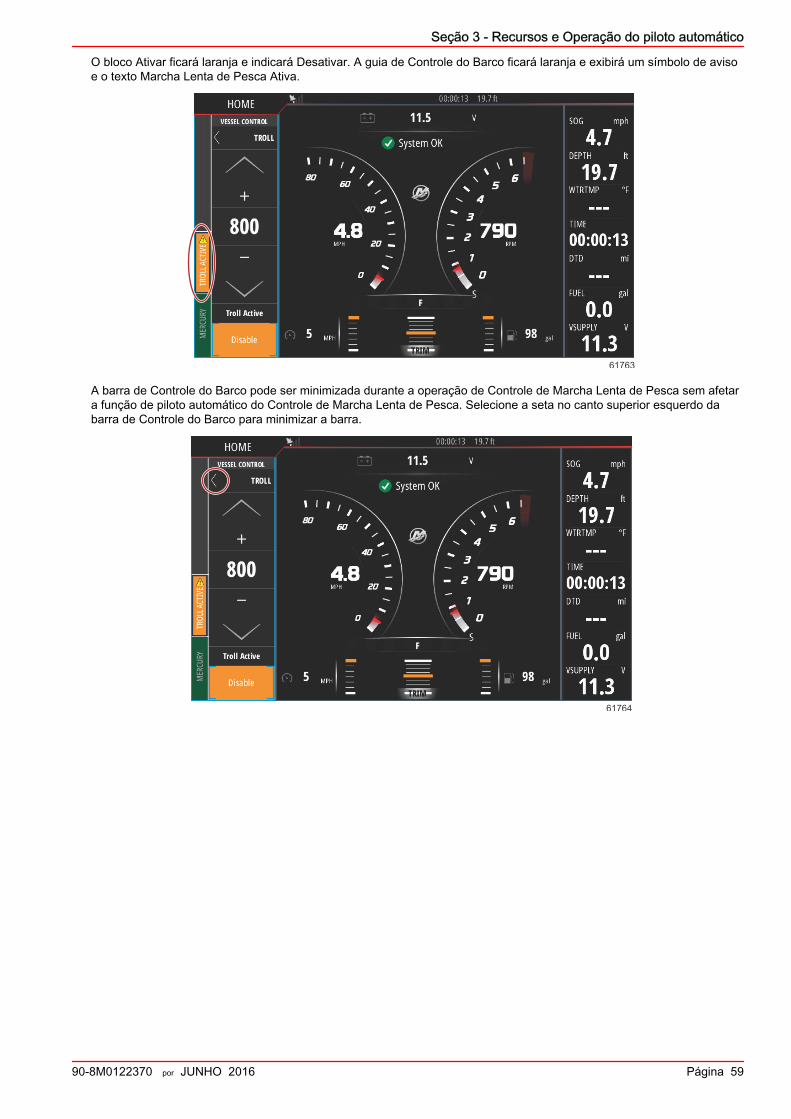
O bloco Ativar ficará laranja e indicará Desativar. A guia de Controle do Barco ficará laranja e exibirá um símbolo de avisoe o texto Marcha Lenta de Pesca Ativa.
61763
A barra de Controle do Barco pode ser minimizada durante a operação de Controle de Marcha Lenta de Pesca sem afetara função de piloto automático do Controle de Marcha Lenta de Pesca. Selecione a seta no canto superior esquerdo dabarra de Controle do Barco para minimizar a barra.
61764
Seção 3 - Recursos e Operação do piloto automático
Página 60 90-8M0122370 por JUNHO 2016
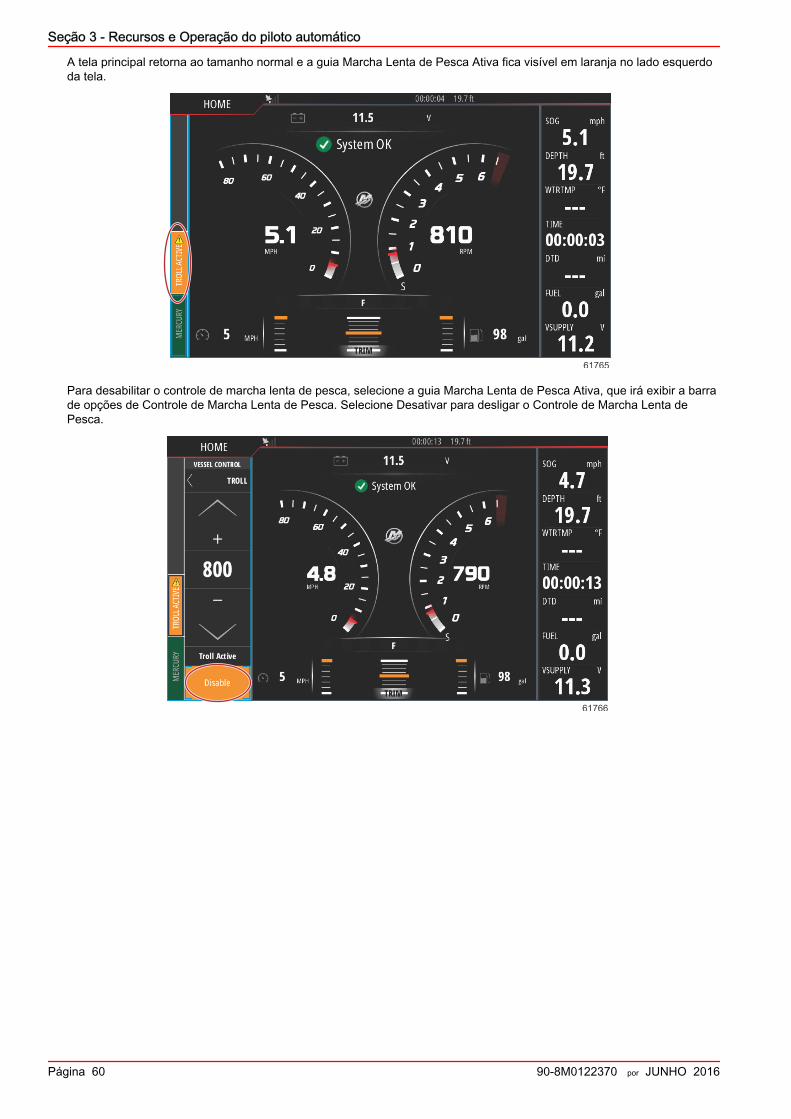
A tela principal retorna ao tamanho normal e a guia Marcha Lenta de Pesca Ativa fica visível em laranja no lado esquerdoda tela.
61765
Para desabilitar o controle de marcha lenta de pesca, selecione a guia Marcha Lenta de Pesca Ativa, que irá exibir a barrade opções de Controle de Marcha Lenta de Pesca. Selecione Desativar para desligar o Controle de Marcha Lenta dePesca.
61766
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 61
Seção 4 - Configuração e CalibragensÍndiceConfigurações do Sistema................................................ 62
Navegação no Menu Configurações.......................... 62Localizações do Leme e do dispositivo...................... 62Assistente de configuração........................................ 63Simulação................................................................... 63
Configurações do Barco.................................................... 63Guias.......................................................................... 63Tanques..................................................................... 65Velocidade.................................................................. 66Direção....................................................................... 70Controle do Barco...................................................... 71Câmeras instaladas.................................................... 72Conjunto de gerador Ativado...................................... 73Notificação de Manutenção........................................ 73
Temperatura do mar................................................... 74Configurações dos Motores.............................................. 74
Motores Mostrados..................................................... 74Modelo do Motor........................................................ 75Limites........................................................................ 76Dados suportados...................................................... 77Modo ECO.................................................................. 78Tipo de Cruzeiro/Smart Tow...................................... 79Compensador............................................................. 79
Alarmes............................................................................. 80Configuração dos Alarmes......................................... 80
Arquivo de identidade....................................................... 81Exportar...................................................................... 81Importar...................................................................... 82
4
Seção 4 - Configuração e Calibragens
Página 62 90-8M0122370 por JUNHO 2016
Configurações do SistemaNavegação no Menu Configurações
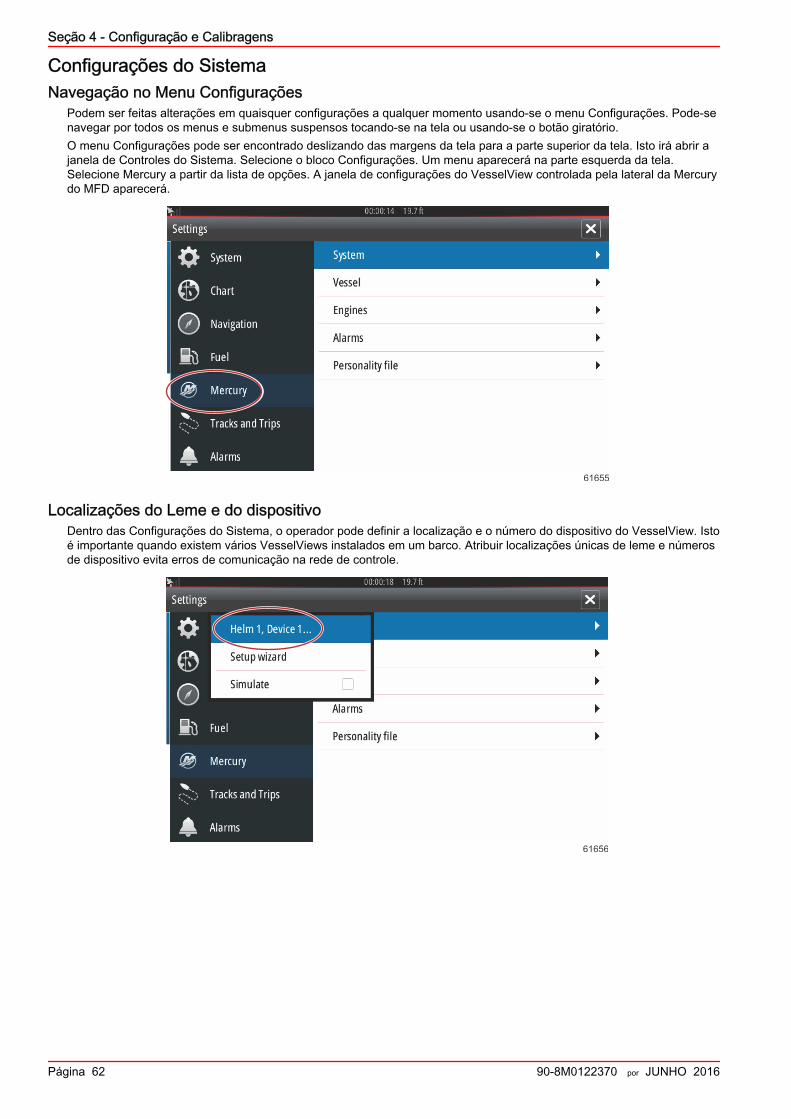
Podem ser feitas alterações em quaisquer configurações a qualquer momento usando-se o menu Configurações. Pode-senavegar por todos os menus e submenus suspensos tocando-se na tela ou usando-se o botão giratório.O menu Configurações pode ser encontrado deslizando das margens da tela para a parte superior da tela. Isto irá abrir ajanela de Controles do Sistema. Selecione o bloco Configurações. Um menu aparecerá na parte esquerda da tela.Selecione Mercury a partir da lista de opções. A janela de configurações do VesselView controlada pela lateral da Mercurydo MFD aparecerá.
61655
Localizações do Leme e do dispositivoDentro das Configurações do Sistema, o operador pode definir a localização e o número do dispositivo do VesselView. Istoé importante quando existem vários VesselViews instalados em um barco. Atribuir localizações únicas de leme e númerosde dispositivo evita erros de comunicação na rede de controle.
61656
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 63
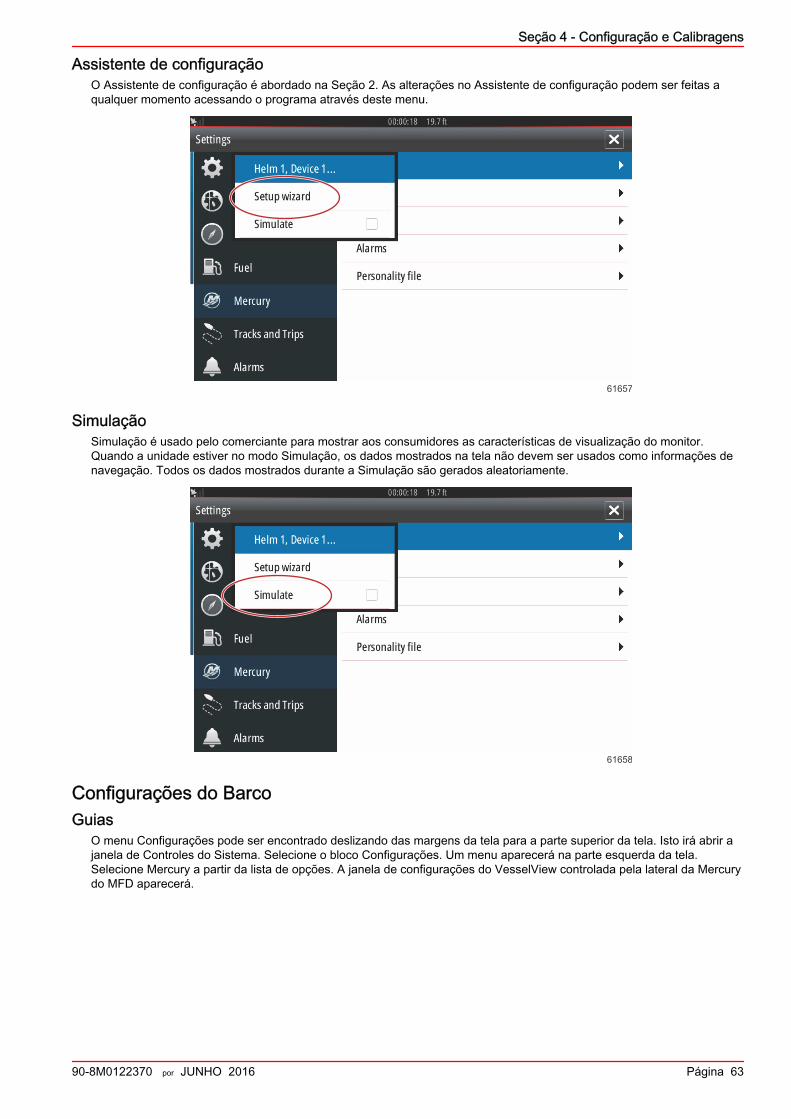
Assistente de configuraçãoO Assistente de configuração é abordado na Seção 2. As alterações no Assistente de configuração podem ser feitas aqualquer momento acessando o programa através deste menu.
61657
SimulaçãoSimulação é usado pelo comerciante para mostrar aos consumidores as características de visualização do monitor.Quando a unidade estiver no modo Simulação, os dados mostrados na tela não devem ser usados como informações denavegação. Todos os dados mostrados durante a Simulação são gerados aleatoriamente.
61658
Configurações do BarcoGuias
O menu Configurações pode ser encontrado deslizando das margens da tela para a parte superior da tela. Isto irá abrir ajanela de Controles do Sistema. Selecione o bloco Configurações. Um menu aparecerá na parte esquerda da tela.Selecione Mercury a partir da lista de opções. A janela de configurações do VesselView controlada pela lateral da Mercurydo MFD aparecerá.
Seção 4 - Configuração e Calibragens
Página 64 90-8M0122370 por JUNHO 2016
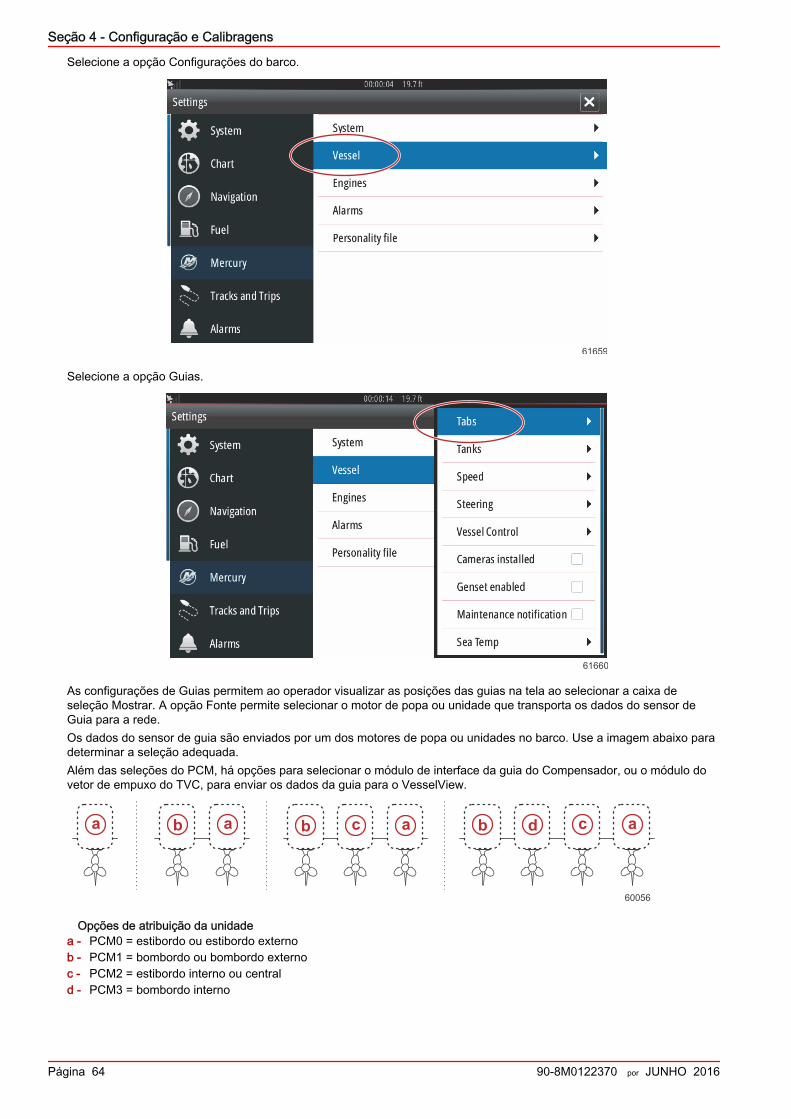
Selecione a opção Configurações do barco.
61659
Selecione a opção Guias.
61660
As configurações de Guias permitem ao operador visualizar as posições das guias na tela ao selecionar a caixa deseleção Mostrar. A opção Fonte permite selecionar o motor de popa ou unidade que transporta os dados do sensor deGuia para a rede.Os dados do sensor de guia são enviados por um dos motores de popa ou unidades no barco. Use a imagem abaixo paradeterminar a seleção adequada.Além das seleções do PCM, há opções para selecionar o módulo de interface da guia do Compensador, ou o módulo dovetor de empuxo do TVC, para enviar os dados da guia para o VesselView.
Opções de atribuição da unidadea - PCM0 = estibordo ou estibordo externob - PCM1 = bombordo ou bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
a a ab b bc cd
60056
a
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 65
61661
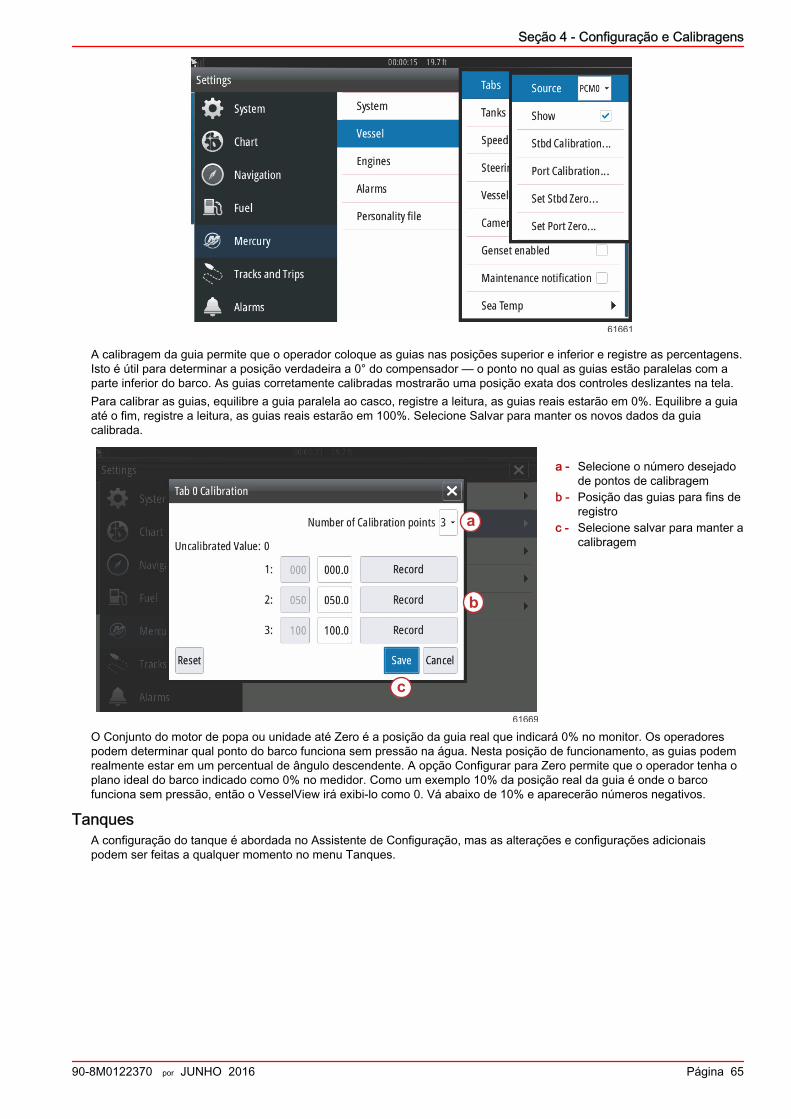
A calibragem da guia permite que o operador coloque as guias nas posições superior e inferior e registre as percentagens.Isto é útil para determinar a posição verdadeira a 0° do compensador — o ponto no qual as guias estão paralelas com aparte inferior do barco. As guias corretamente calibradas mostrarão uma posição exata dos controles deslizantes na tela.Para calibrar as guias, equilibre a guia paralela ao casco, registre a leitura, as guias reais estarão em 0%. Equilibre a guiaaté o fim, registre a leitura, as guias reais estarão em 100%. Selecione Salvar para manter os novos dados da guiacalibrada.
a - Selecione o número desejadode pontos de calibragem
b - Posição das guias para fins deregistro
c - Selecione salvar para manter acalibragem
O Conjunto do motor de popa ou unidade até Zero é a posição da guia real que indicará 0% no monitor. Os operadorespodem determinar qual ponto do barco funciona sem pressão na água. Nesta posição de funcionamento, as guias podemrealmente estar em um percentual de ângulo descendente. A opção Configurar para Zero permite que o operador tenha oplano ideal do barco indicado como 0% no medidor. Como um exemplo 10% da posição real da guia é onde o barcofunciona sem pressão, então o VesselView irá exibi-lo como 0. Vá abaixo de 10% e aparecerão números negativos.
TanquesA configuração do tanque é abordada no Assistente de Configuração, mas as alterações e configurações adicionaispodem ser feitas a qualquer momento no menu Tanques.
61669
a
b
c
Seção 4 - Configuração e Calibragens
Página 66 90-8M0122370 por JUNHO 2016
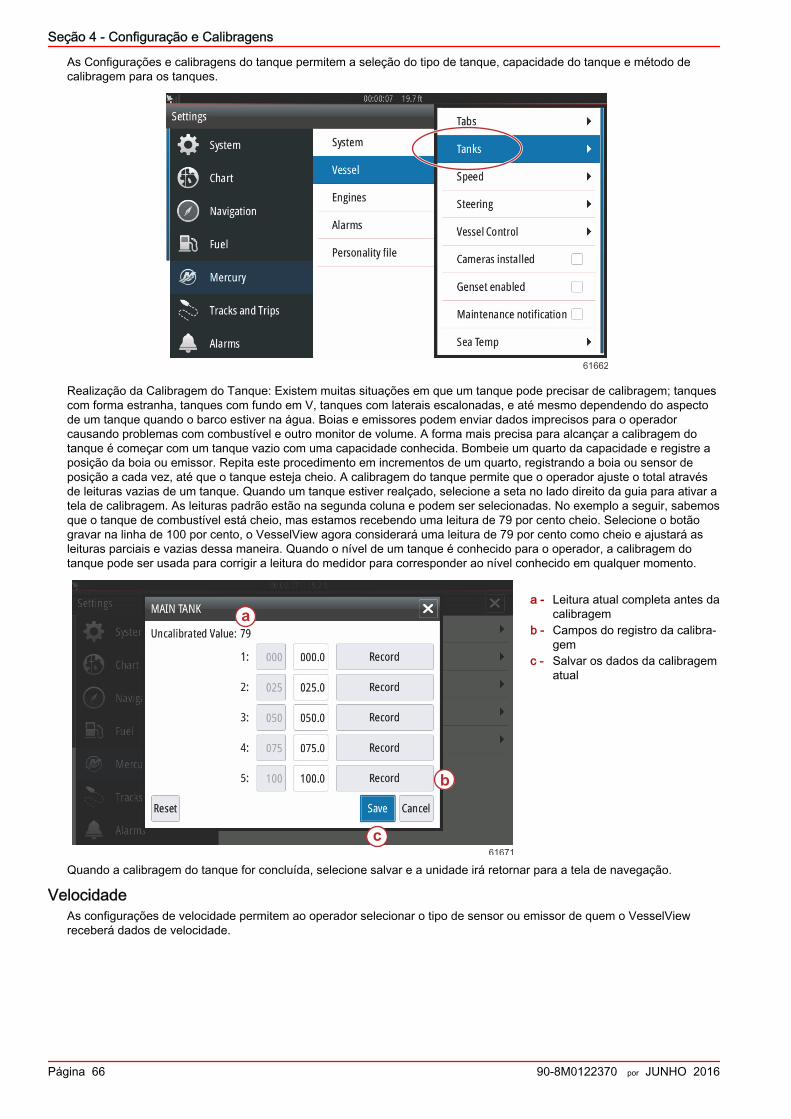
As Configurações e calibragens do tanque permitem a seleção do tipo de tanque, capacidade do tanque e método decalibragem para os tanques.
61662
Realização da Calibragem do Tanque: Existem muitas situações em que um tanque pode precisar de calibragem; tanquescom forma estranha, tanques com fundo em V, tanques com laterais escalonadas, e até mesmo dependendo do aspectode um tanque quando o barco estiver na água. Boias e emissores podem enviar dados imprecisos para o operadorcausando problemas com combustível e outro monitor de volume. A forma mais precisa para alcançar a calibragem dotanque é começar com um tanque vazio com uma capacidade conhecida. Bombeie um quarto da capacidade e registre aposição da boia ou emissor. Repita este procedimento em incrementos de um quarto, registrando a boia ou sensor deposição a cada vez, até que o tanque esteja cheio. A calibragem do tanque permite que o operador ajuste o total atravésde leituras vazias de um tanque. Quando um tanque estiver realçado, selecione a seta no lado direito da guia para ativar atela de calibragem. As leituras padrão estão na segunda coluna e podem ser selecionadas. No exemplo a seguir, sabemosque o tanque de combustível está cheio, mas estamos recebendo uma leitura de 79 por cento cheio. Selecione o botãogravar na linha de 100 por cento, o VesselView agora considerará uma leitura de 79 por cento como cheio e ajustará asleituras parciais e vazias dessa maneira. Quando o nível de um tanque é conhecido para o operador, a calibragem dotanque pode ser usada para corrigir a leitura do medidor para corresponder ao nível conhecido em qualquer momento.
a - Leitura atual completa antes dacalibragem
b - Campos do registro da calibra‐gem
c - Salvar os dados da calibragematual
Quando a calibragem do tanque for concluída, selecione salvar e a unidade irá retornar para a tela de navegação.
VelocidadeAs configurações de velocidade permitem ao operador selecionar o tipo de sensor ou emissor de quem o VesselViewreceberá dados de velocidade.
61671
a
b
c
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 67
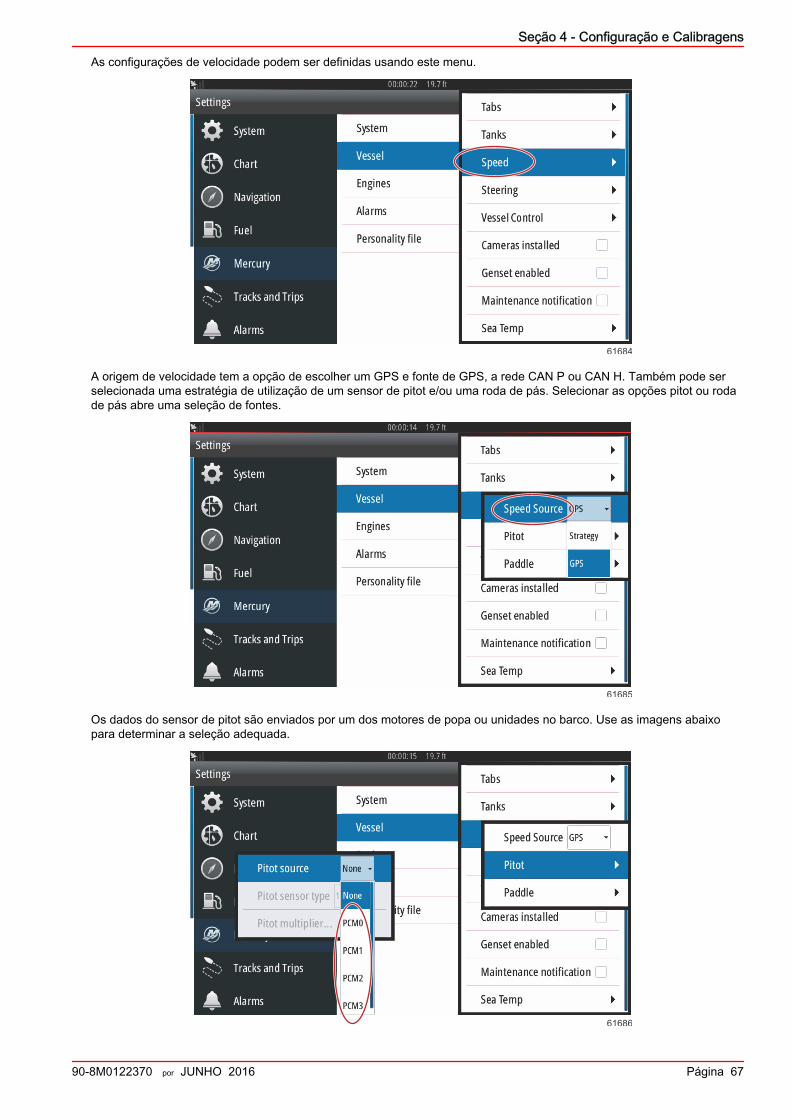
As configurações de velocidade podem ser definidas usando este menu.
61684
A origem de velocidade tem a opção de escolher um GPS e fonte de GPS, a rede CAN P ou CAN H. Também pode serselecionada uma estratégia de utilização de um sensor de pitot e/ou uma roda de pás. Selecionar as opções pitot ou rodade pás abre uma seleção de fontes.
61685
Os dados do sensor de pitot são enviados por um dos motores de popa ou unidades no barco. Use as imagens abaixopara determinar a seleção adequada.
61686
Seção 4 - Configuração e Calibragens
Página 68 90-8M0122370 por JUNHO 2016
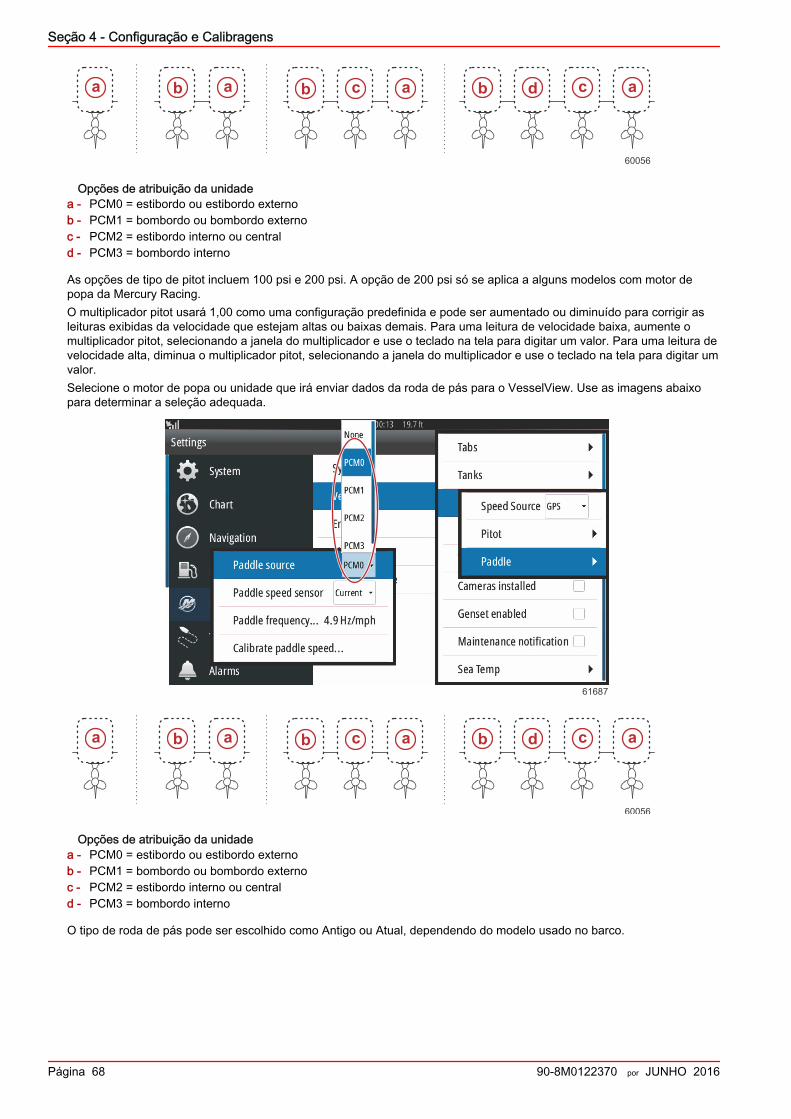
Opções de atribuição da unidadea - PCM0 = estibordo ou estibordo externob - PCM1 = bombordo ou bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
As opções de tipo de pitot incluem 100 psi e 200 psi. A opção de 200 psi só se aplica a alguns modelos com motor depopa da Mercury Racing.O multiplicador pitot usará 1,00 como uma configuração predefinida e pode ser aumentado ou diminuído para corrigir asleituras exibidas da velocidade que estejam altas ou baixas demais. Para uma leitura de velocidade baixa, aumente omultiplicador pitot, selecionando a janela do multiplicador e use o teclado na tela para digitar um valor. Para uma leitura develocidade alta, diminua o multiplicador pitot, selecionando a janela do multiplicador e use o teclado na tela para digitar umvalor.Selecione o motor de popa ou unidade que irá enviar dados da roda de pás para o VesselView. Use as imagens abaixopara determinar a seleção adequada.
61687
Opções de atribuição da unidadea - PCM0 = estibordo ou estibordo externob - PCM1 = bombordo ou bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
O tipo de roda de pás pode ser escolhido como Antigo ou Atual, dependendo do modelo usado no barco.
a a ab b bc cd
60056
a
a a ab b bc cd
60056
a
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 69
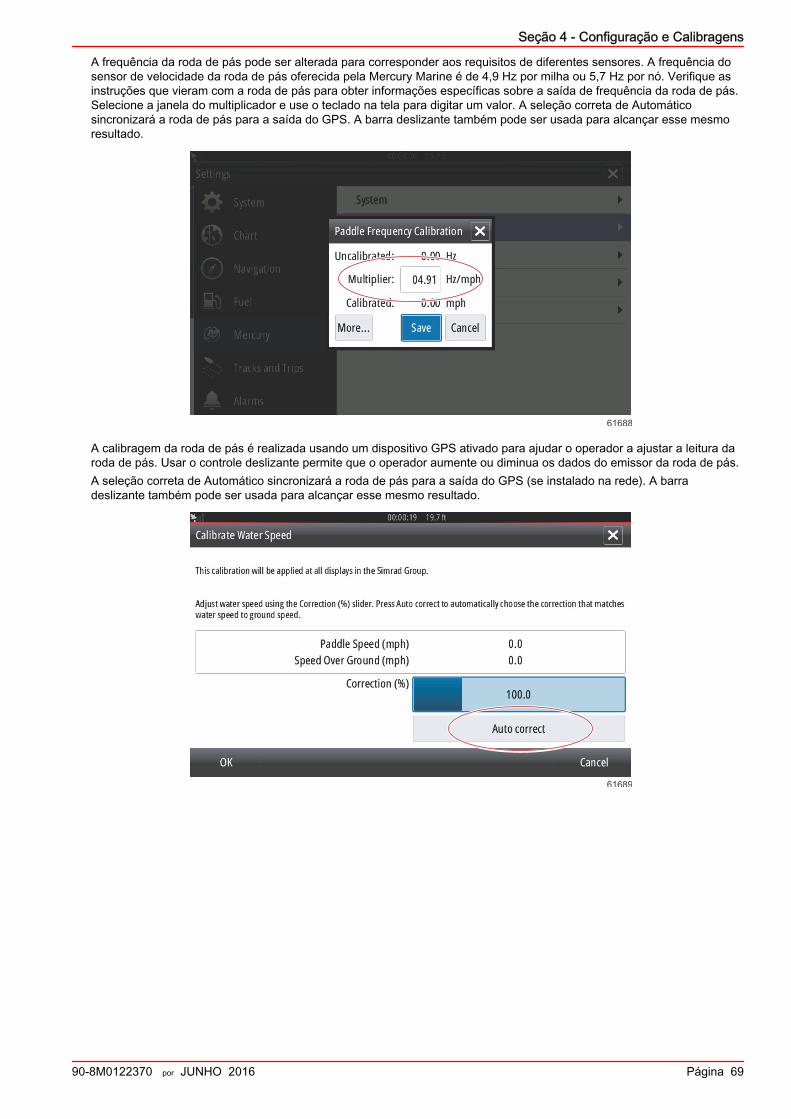
A frequência da roda de pás pode ser alterada para corresponder aos requisitos de diferentes sensores. A frequência dosensor de velocidade da roda de pás oferecida pela Mercury Marine é de 4,9 Hz por milha ou 5,7 Hz por nó. Verifique asinstruções que vieram com a roda de pás para obter informações específicas sobre a saída de frequência da roda de pás.Selecione a janela do multiplicador e use o teclado na tela para digitar um valor. A seleção correta de Automáticosincronizará a roda de pás para a saída do GPS. A barra deslizante também pode ser usada para alcançar esse mesmoresultado.
61688
A calibragem da roda de pás é realizada usando um dispositivo GPS ativado para ajudar o operador a ajustar a leitura daroda de pás. Usar o controle deslizante permite que o operador aumente ou diminua os dados do emissor da roda de pás.A seleção correta de Automático sincronizará a roda de pás para a saída do GPS (se instalado na rede). A barradeslizante também pode ser usada para alcançar esse mesmo resultado.
61689
Seção 4 - Configuração e Calibragens
Página 70 90-8M0122370 por JUNHO 2016
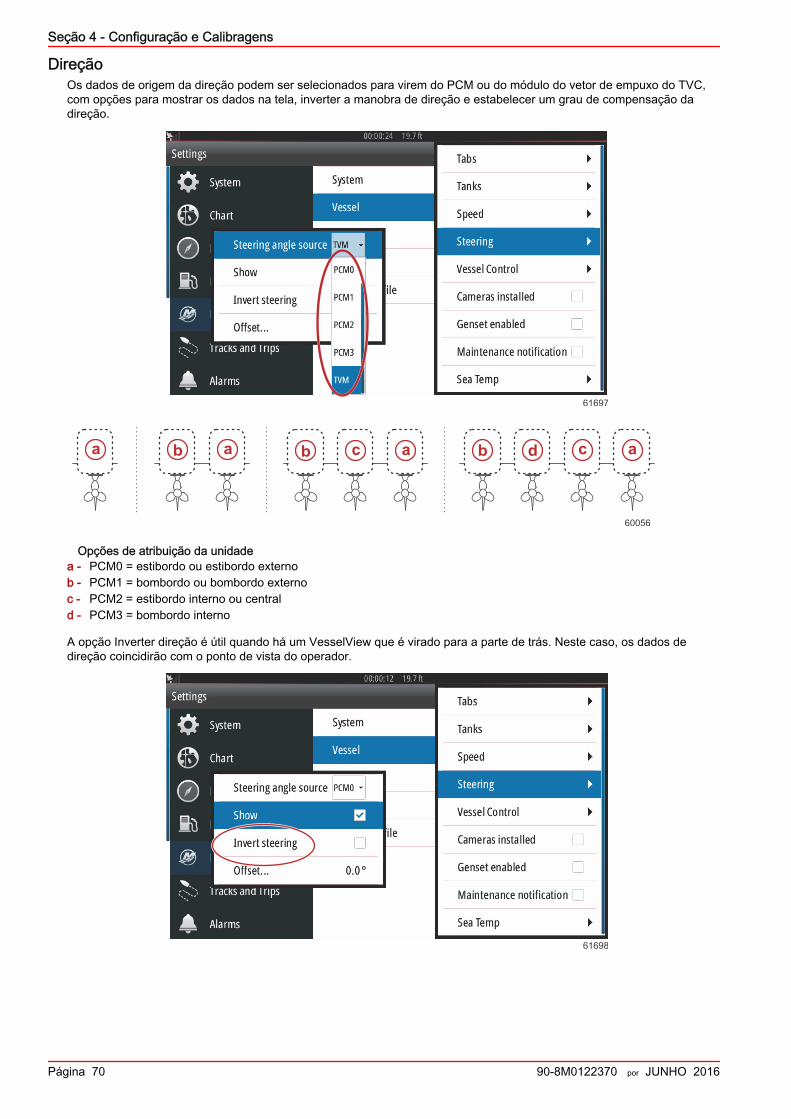
DireçãoOs dados de origem da direção podem ser selecionados para virem do PCM ou do módulo do vetor de empuxo do TVC,com opções para mostrar os dados na tela, inverter a manobra de direção e estabelecer um grau de compensação dadireção.
61697
Opções de atribuição da unidadea - PCM0 = estibordo ou estibordo externob - PCM1 = bombordo ou bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
A opção Inverter direção é útil quando há um VesselView que é virado para a parte de trás. Neste caso, os dados dedireção coincidirão com o ponto de vista do operador.
61698
a a ab b bc cd
60056
a
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 71
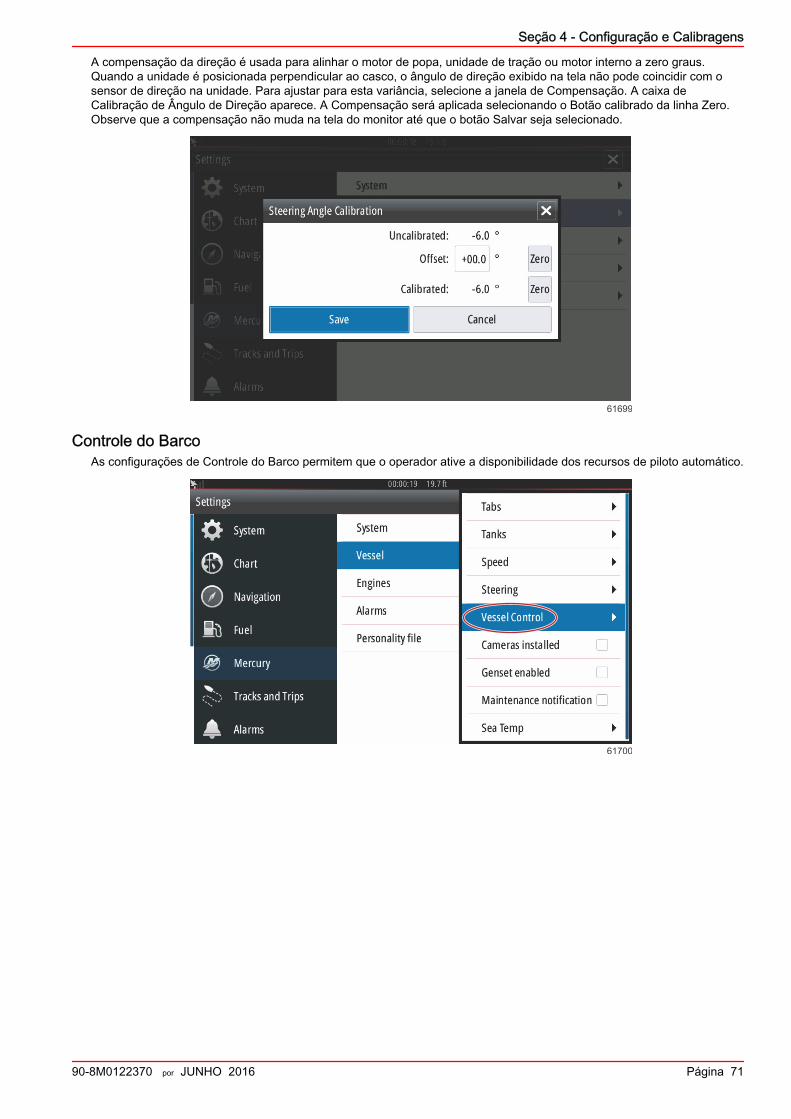
A compensação da direção é usada para alinhar o motor de popa, unidade de tração ou motor interno a zero graus.Quando a unidade é posicionada perpendicular ao casco, o ângulo de direção exibido na tela não pode coincidir com osensor de direção na unidade. Para ajustar para esta variância, selecione a janela de Compensação. A caixa deCalibração de Ângulo de Direção aparece. A Compensação será aplicada selecionando o Botão calibrado da linha Zero.Observe que a compensação não muda na tela do monitor até que o botão Salvar seja selecionado.
61699
Controle do BarcoAs configurações de Controle do Barco permitem que o operador ative a disponibilidade dos recursos de piloto automático.
61700
Seção 4 - Configuração e Calibragens
Página 72 90-8M0122370 por JUNHO 2016
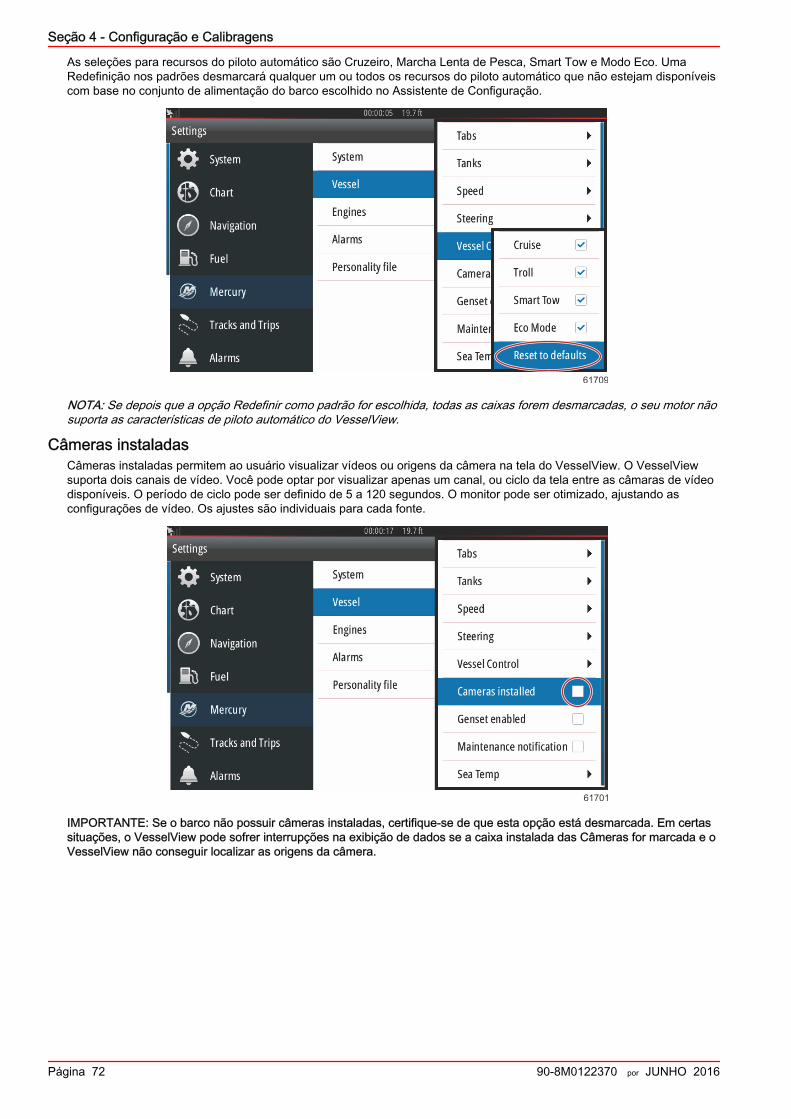
As seleções para recursos do piloto automático são Cruzeiro, Marcha Lenta de Pesca, Smart Tow e Modo Eco. UmaRedefinição nos padrões desmarcará qualquer um ou todos os recursos do piloto automático que não estejam disponíveiscom base no conjunto de alimentação do barco escolhido no Assistente de Configuração.
61709
NOTA: Se depois que a opção Redefinir como padrão for escolhida, todas as caixas forem desmarcadas, o seu motor nãosuporta as características de piloto automático do VesselView.
Câmeras instaladasCâmeras instaladas permitem ao usuário visualizar vídeos ou origens da câmera na tela do VesselView. O VesselViewsuporta dois canais de vídeo. Você pode optar por visualizar apenas um canal, ou ciclo da tela entre as câmaras de vídeodisponíveis. O período de ciclo pode ser definido de 5 a 120 segundos. O monitor pode ser otimizado, ajustando asconfigurações de vídeo. Os ajustes são individuais para cada fonte.
61701
IMPORTANTE: Se o barco não possuir câmeras instaladas, certifique-se de que esta opção está desmarcada. Em certassituações, o VesselView pode sofrer interrupções na exibição de dados se a caixa instalada das Câmeras for marcada e oVesselView não conseguir localizar as origens da câmera.
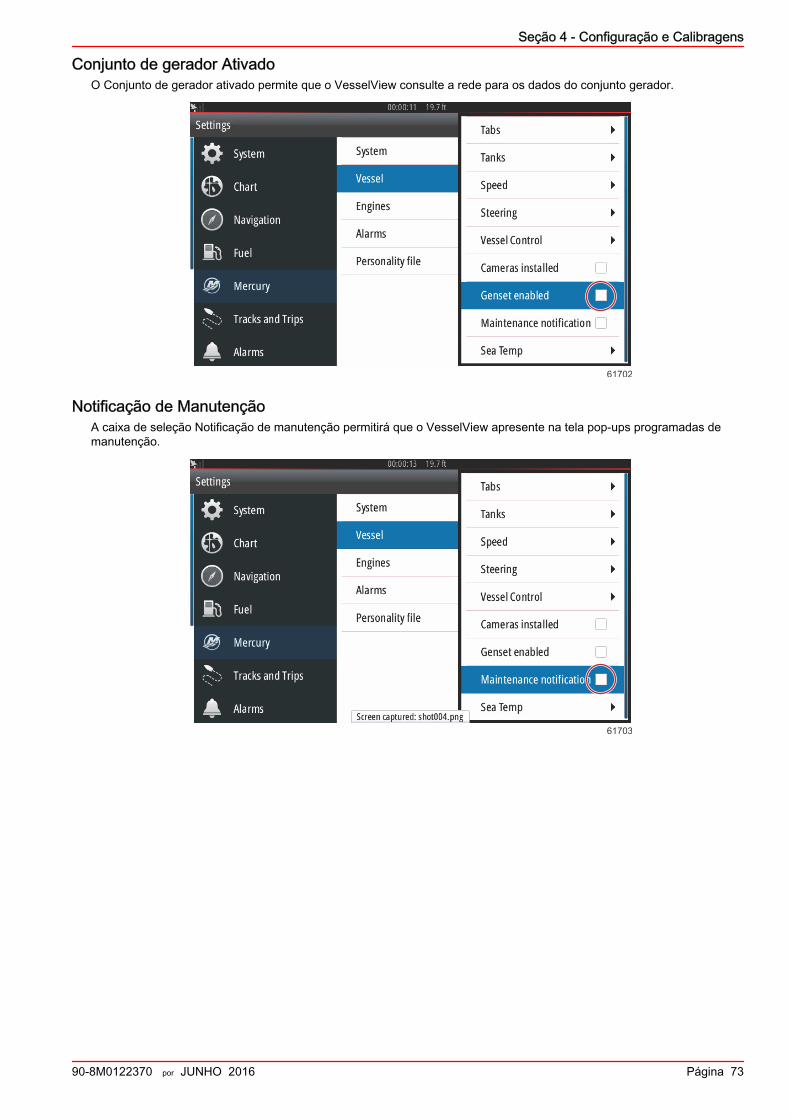
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 73
Conjunto de gerador AtivadoO Conjunto de gerador ativado permite que o VesselView consulte a rede para os dados do conjunto gerador.
61702
Notificação de ManutençãoA caixa de seleção Notificação de manutenção permitirá que o VesselView apresente na tela pop-ups programadas demanutenção.
61703
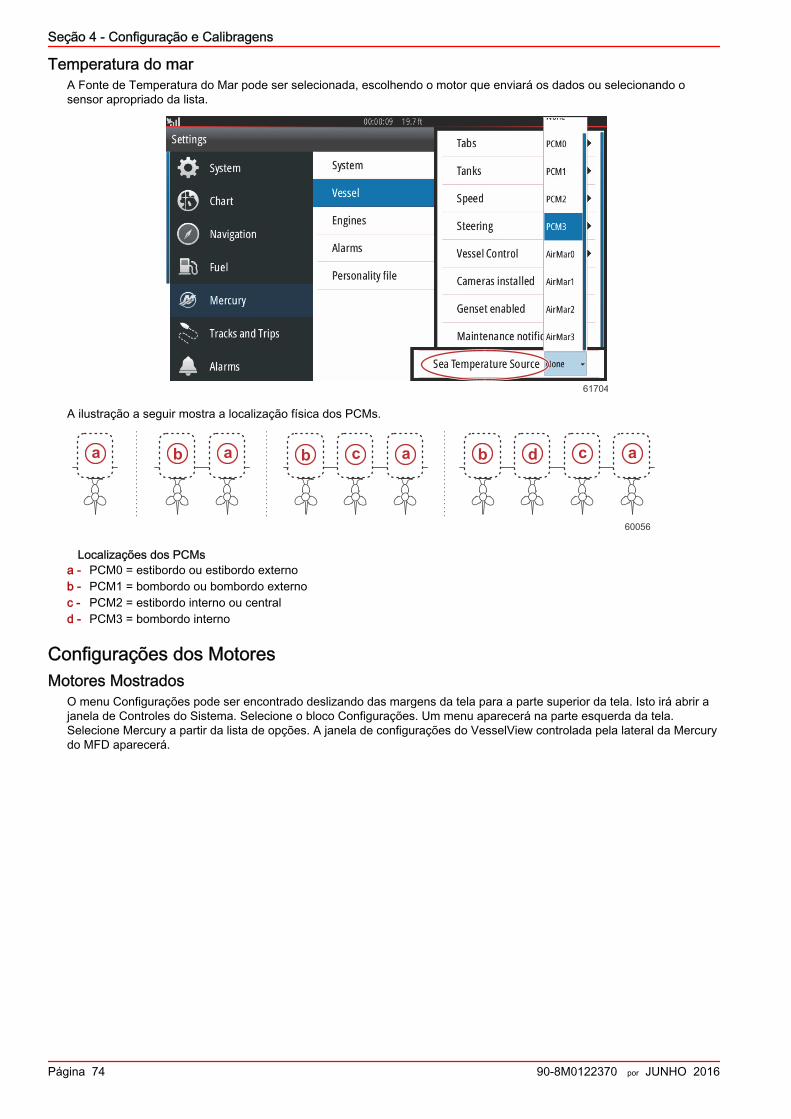
Seção 4 - Configuração e Calibragens
Página 74 90-8M0122370 por JUNHO 2016
Temperatura do marA Fonte de Temperatura do Mar pode ser selecionada, escolhendo o motor que enviará os dados ou selecionando osensor apropriado da lista.
61704
A ilustração a seguir mostra a localização física dos PCMs.
Localizações dos PCMsa - PCM0 = estibordo ou estibordo externob - PCM1 = bombordo ou bombordo externoc - PCM2 = estibordo interno ou centrald - PCM3 = bombordo interno
Configurações dos MotoresMotores Mostrados
O menu Configurações pode ser encontrado deslizando das margens da tela para a parte superior da tela. Isto irá abrir ajanela de Controles do Sistema. Selecione o bloco Configurações. Um menu aparecerá na parte esquerda da tela.Selecione Mercury a partir da lista de opções. A janela de configurações do VesselView controlada pela lateral da Mercurydo MFD aparecerá.
a a ab b bc cd
60056
a
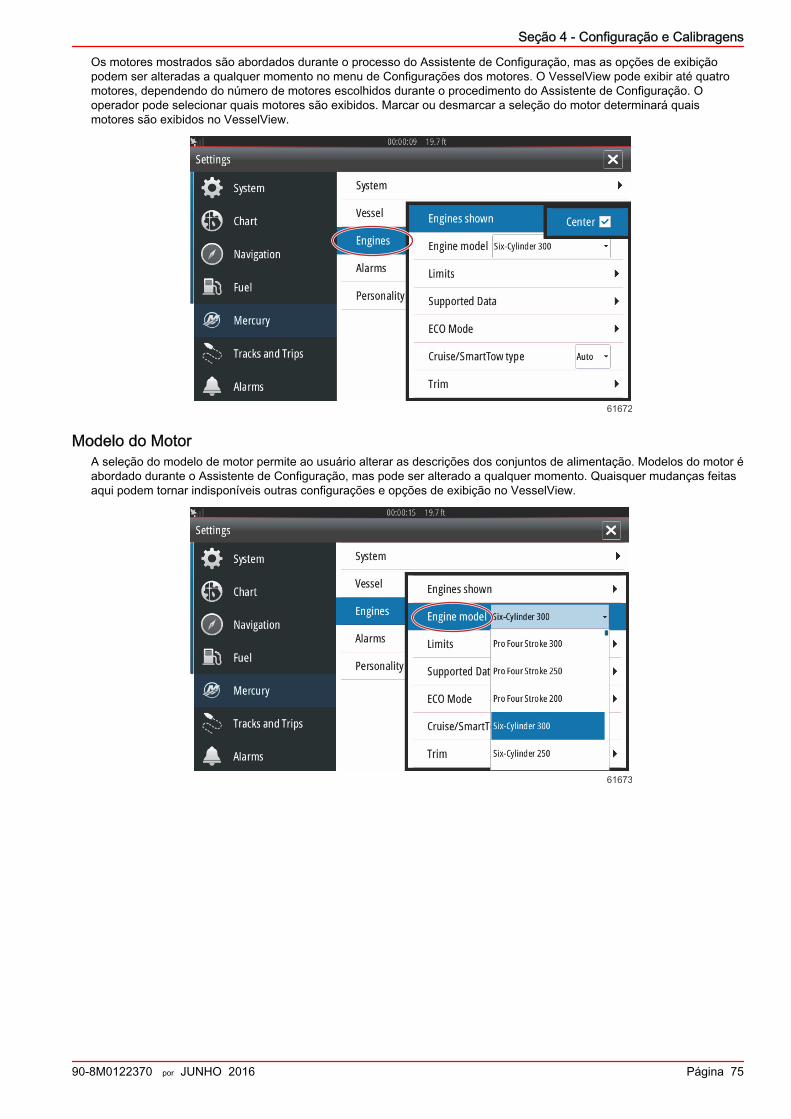
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 75
Os motores mostrados são abordados durante o processo do Assistente de Configuração, mas as opções de exibiçãopodem ser alteradas a qualquer momento no menu de Configurações dos motores. O VesselView pode exibir até quatromotores, dependendo do número de motores escolhidos durante o procedimento do Assistente de Configuração. Ooperador pode selecionar quais motores são exibidos. Marcar ou desmarcar a seleção do motor determinará quaismotores são exibidos no VesselView.
61672
Modelo do MotorA seleção do modelo de motor permite ao usuário alterar as descrições dos conjuntos de alimentação. Modelos do motor éabordado durante o Assistente de Configuração, mas pode ser alterado a qualquer momento. Quaisquer mudanças feitasaqui podem tornar indisponíveis outras configurações e opções de exibição no VesselView.
61673
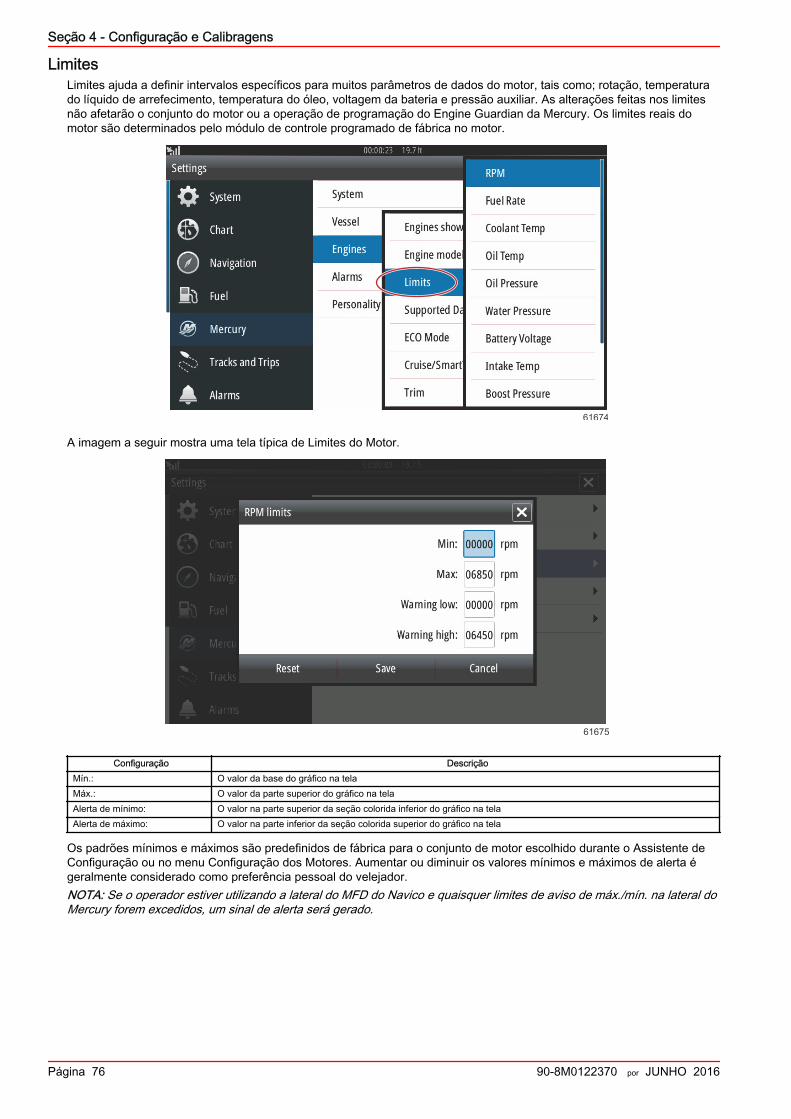
Seção 4 - Configuração e Calibragens
Página 76 90-8M0122370 por JUNHO 2016
LimitesLimites ajuda a definir intervalos específicos para muitos parâmetros de dados do motor, tais como; rotação, temperaturado líquido de arrefecimento, temperatura do óleo, voltagem da bateria e pressão auxiliar. As alterações feitas nos limitesnão afetarão o conjunto do motor ou a operação de programação do Engine Guardian da Mercury. Os limites reais domotor são determinados pelo módulo de controle programado de fábrica no motor.
61674
A imagem a seguir mostra uma tela típica de Limites do Motor.
61675
Configuração DescriçãoMín.: O valor da base do gráfico na telaMáx.: O valor da parte superior do gráfico na telaAlerta de mínimo: O valor na parte superior da seção colorida inferior do gráfico na telaAlerta de máximo: O valor na parte inferior da seção colorida superior do gráfico na tela
Os padrões mínimos e máximos são predefinidos de fábrica para o conjunto de motor escolhido durante o Assistente deConfiguração ou no menu Configuração dos Motores. Aumentar ou diminuir os valores mínimos e máximos de alerta égeralmente considerado como preferência pessoal do velejador.NOTA: Se o operador estiver utilizando a lateral do MFD do Navico e quaisquer limites de aviso de máx./mín. na lateral doMercury forem excedidos, um sinal de alerta será gerado.
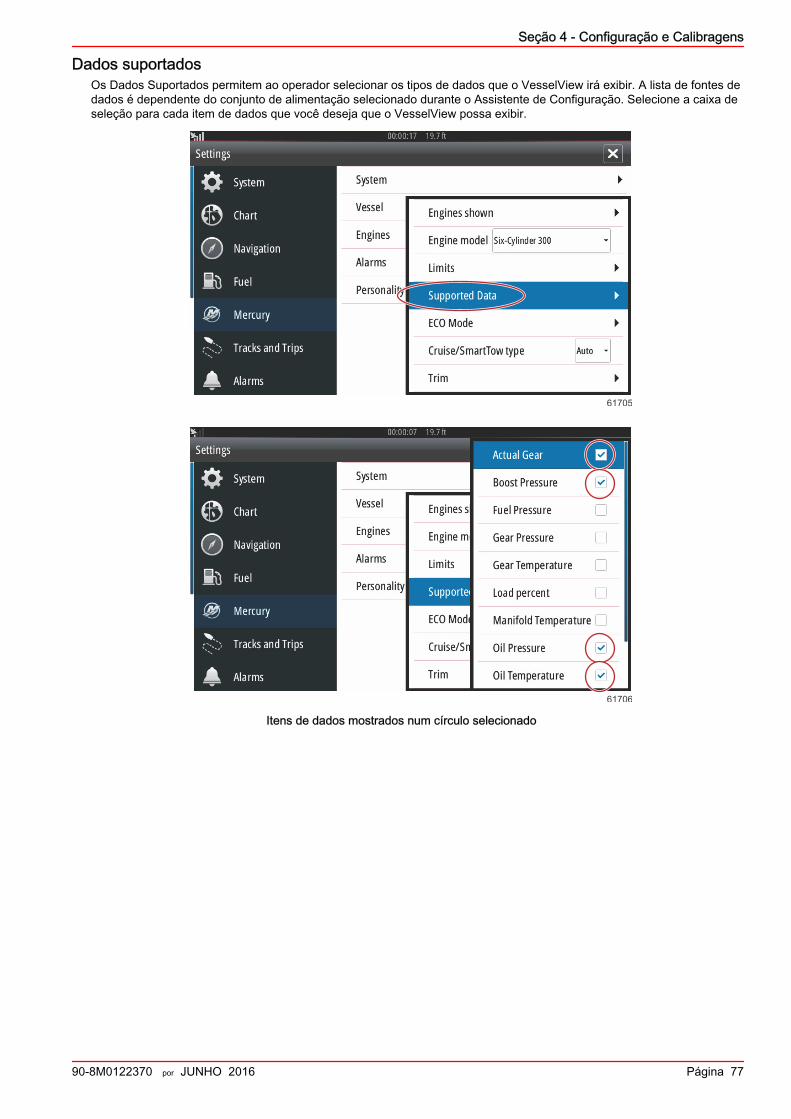
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 77
Dados suportadosOs Dados Suportados permitem ao operador selecionar os tipos de dados que o VesselView irá exibir. A lista de fontes dedados é dependente do conjunto de alimentação selecionado durante o Assistente de Configuração. Selecione a caixa deseleção para cada item de dados que você deseja que o VesselView possa exibir.
61705
61706
Itens de dados mostrados num círculo selecionado
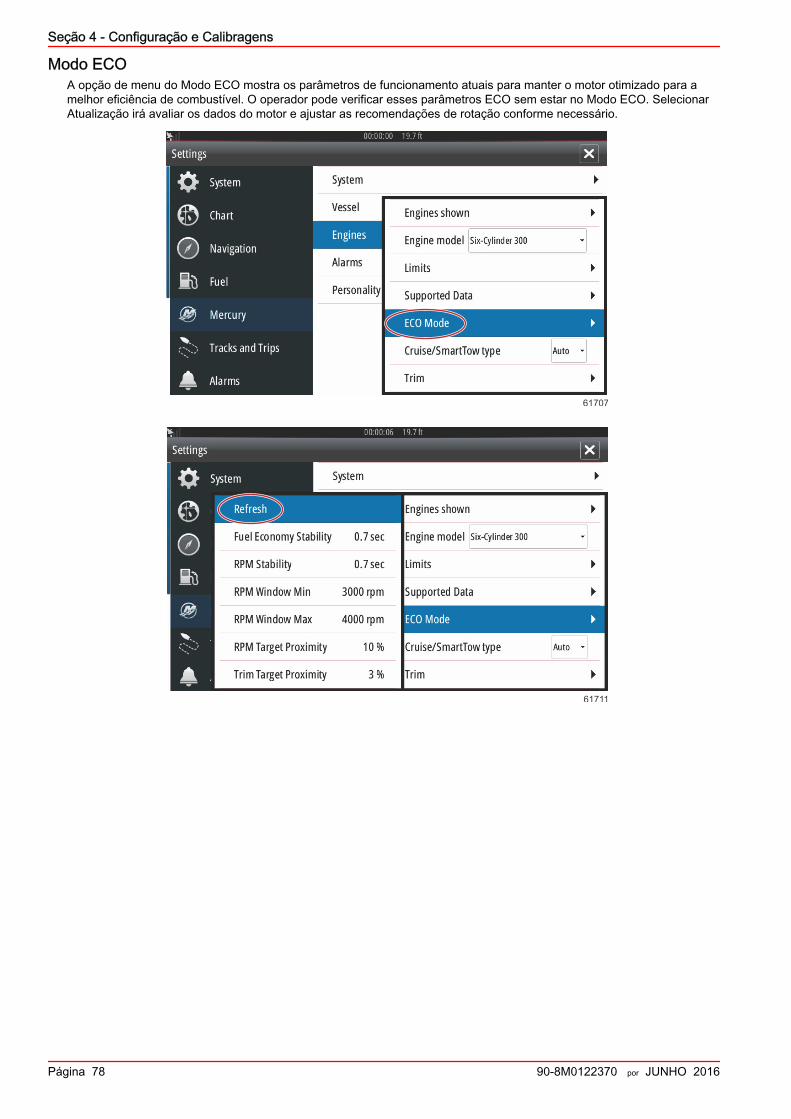
Seção 4 - Configuração e Calibragens
Página 78 90-8M0122370 por JUNHO 2016
Modo ECOA opção de menu do Modo ECO mostra os parâmetros de funcionamento atuais para manter o motor otimizado para amelhor eficiência de combustível. O operador pode verificar esses parâmetros ECO sem estar no Modo ECO. SelecionarAtualização irá avaliar os dados do motor e ajustar as recomendações de rotação conforme necessário.
61707
61711
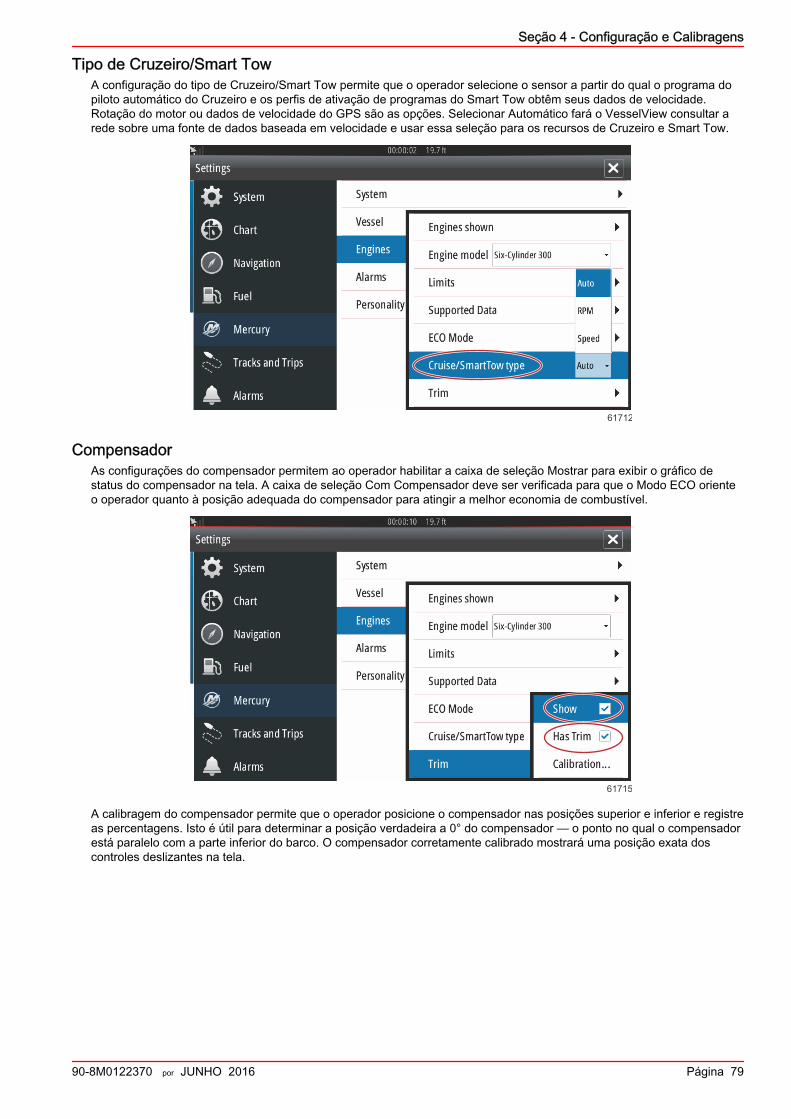
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 79
Tipo de Cruzeiro/Smart TowA configuração do tipo de Cruzeiro/Smart Tow permite que o operador selecione o sensor a partir do qual o programa dopiloto automático do Cruzeiro e os perfis de ativação de programas do Smart Tow obtêm seus dados de velocidade.Rotação do motor ou dados de velocidade do GPS são as opções. Selecionar Automático fará o VesselView consultar arede sobre uma fonte de dados baseada em velocidade e usar essa seleção para os recursos de Cruzeiro e Smart Tow.
61712
CompensadorAs configurações do compensador permitem ao operador habilitar a caixa de seleção Mostrar para exibir o gráfico destatus do compensador na tela. A caixa de seleção Com Compensador deve ser verificada para que o Modo ECO orienteo operador quanto à posição adequada do compensador para atingir a melhor economia de combustível.
61715
A calibragem do compensador permite que o operador posicione o compensador nas posições superior e inferior e registreas percentagens. Isto é útil para determinar a posição verdadeira a 0° do compensador — o ponto no qual o compensadorestá paralelo com a parte inferior do barco. O compensador corretamente calibrado mostrará uma posição exata doscontroles deslizantes na tela.
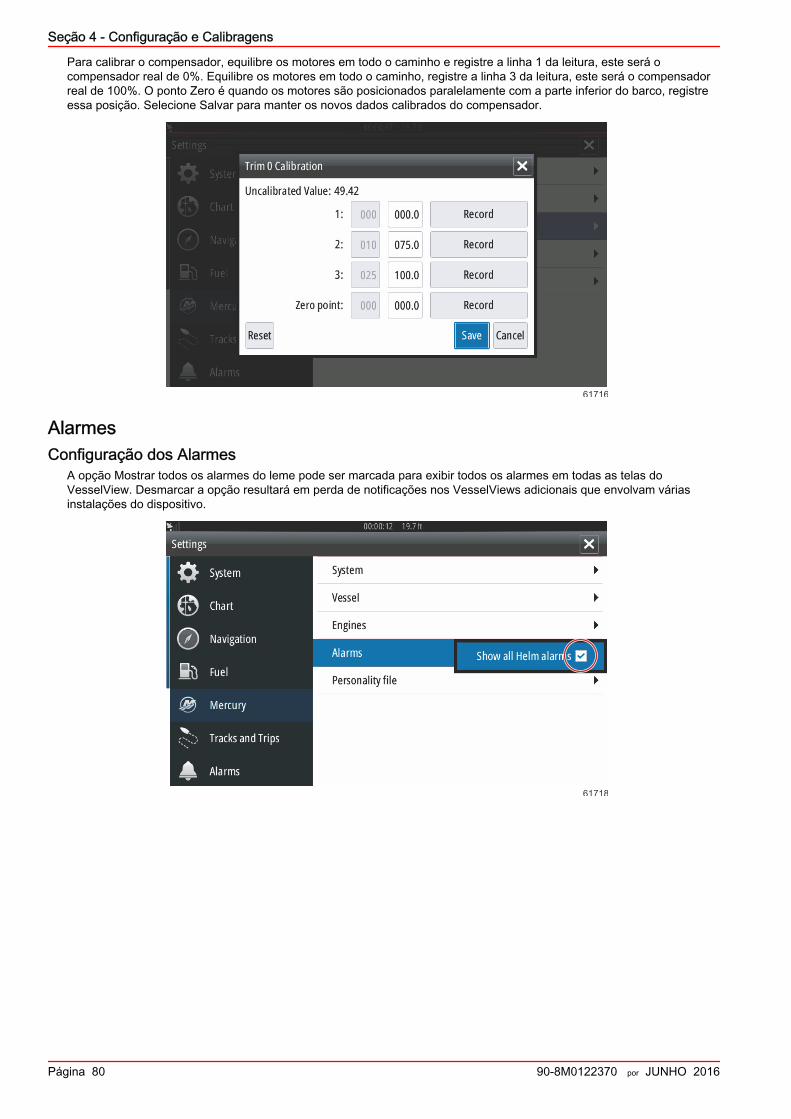
Seção 4 - Configuração e Calibragens
Página 80 90-8M0122370 por JUNHO 2016
Para calibrar o compensador, equilibre os motores em todo o caminho e registre a linha 1 da leitura, este será ocompensador real de 0%. Equilibre os motores em todo o caminho, registre a linha 3 da leitura, este será o compensadorreal de 100%. O ponto Zero é quando os motores são posicionados paralelamente com a parte inferior do barco, registreessa posição. Selecione Salvar para manter os novos dados calibrados do compensador.
61716
AlarmesConfiguração dos Alarmes
A opção Mostrar todos os alarmes do leme pode ser marcada para exibir todos os alarmes em todas as telas doVesselView. Desmarcar a opção resultará em perda de notificações nos VesselViews adicionais que envolvam váriasinstalações do dispositivo.
61718
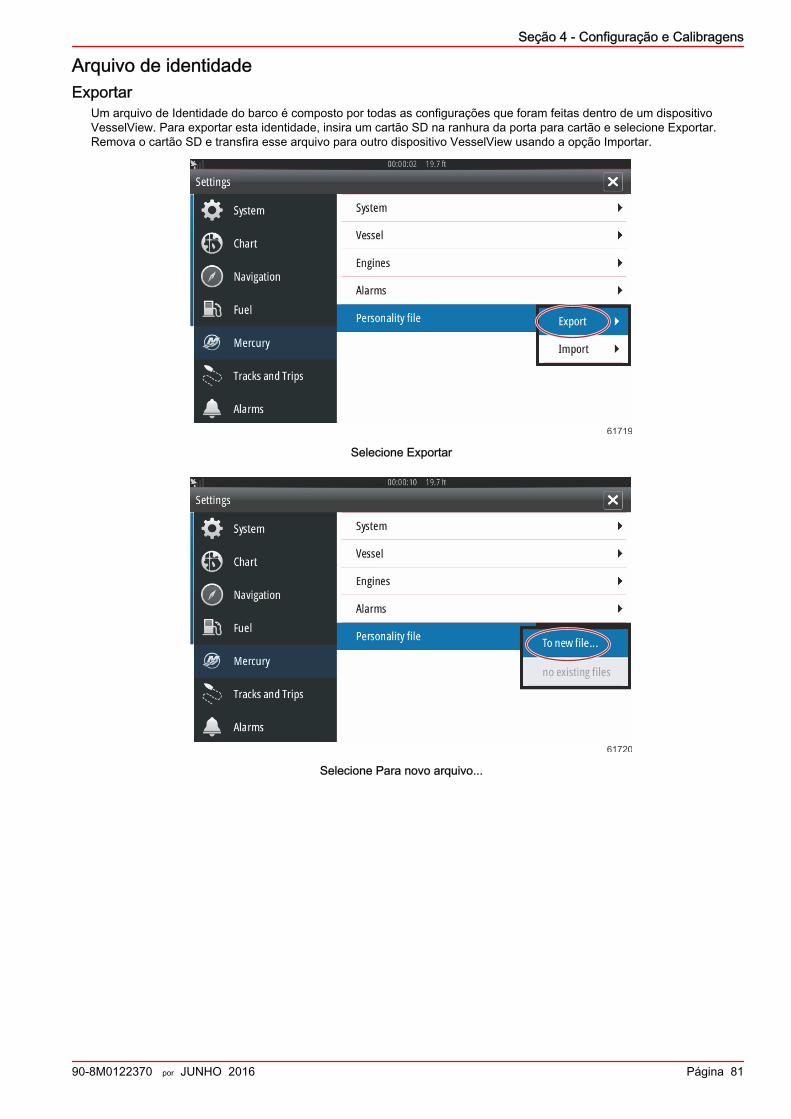
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 81
Arquivo de identidadeExportar
Um arquivo de Identidade do barco é composto por todas as configurações que foram feitas dentro de um dispositivoVesselView. Para exportar esta identidade, insira um cartão SD na ranhura da porta para cartão e selecione Exportar.Remova o cartão SD e transfira esse arquivo para outro dispositivo VesselView usando a opção Importar.
61719
Selecione Exportar
61720
Selecione Para novo arquivo...
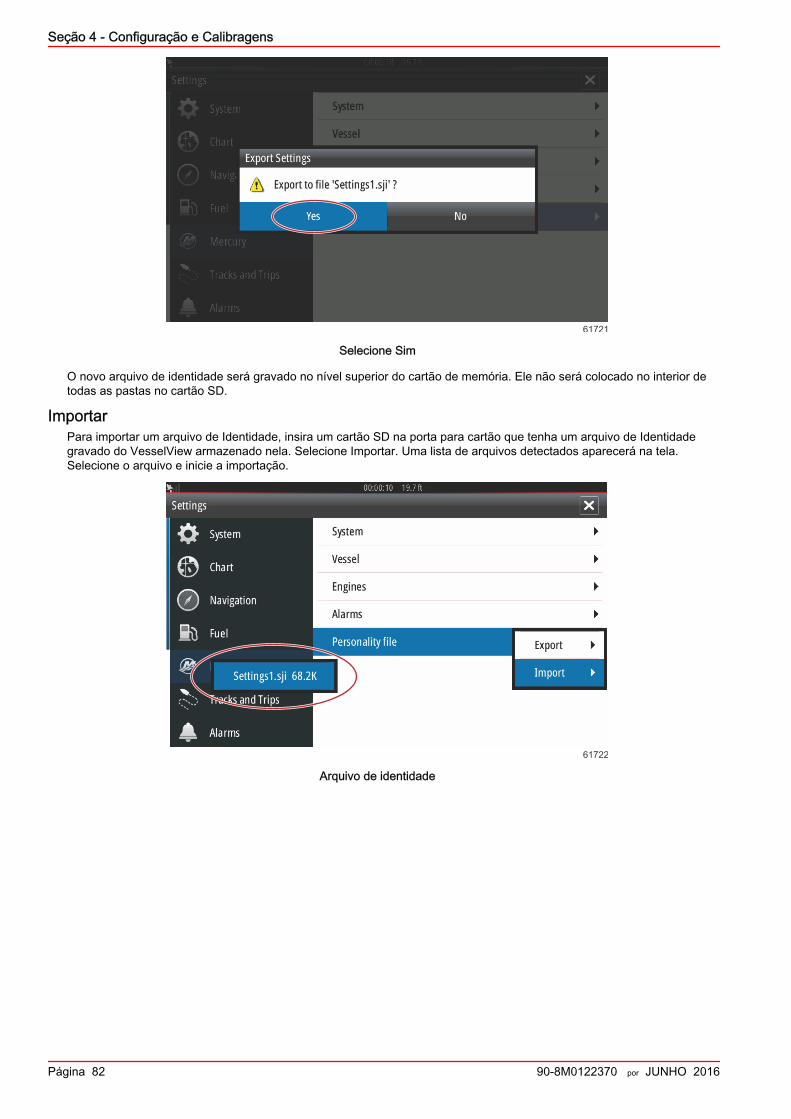
Seção 4 - Configuração e Calibragens
Página 82 90-8M0122370 por JUNHO 2016
61721
Selecione Sim
O novo arquivo de identidade será gravado no nível superior do cartão de memória. Ele não será colocado no interior detodas as pastas no cartão SD.
ImportarPara importar um arquivo de Identidade, insira um cartão SD na porta para cartão que tenha um arquivo de Identidadegravado do VesselView armazenado nela. Selecione Importar. Uma lista de arquivos detectados aparecerá na tela.Selecione o arquivo e inicie a importação.
61722
Arquivo de identidade
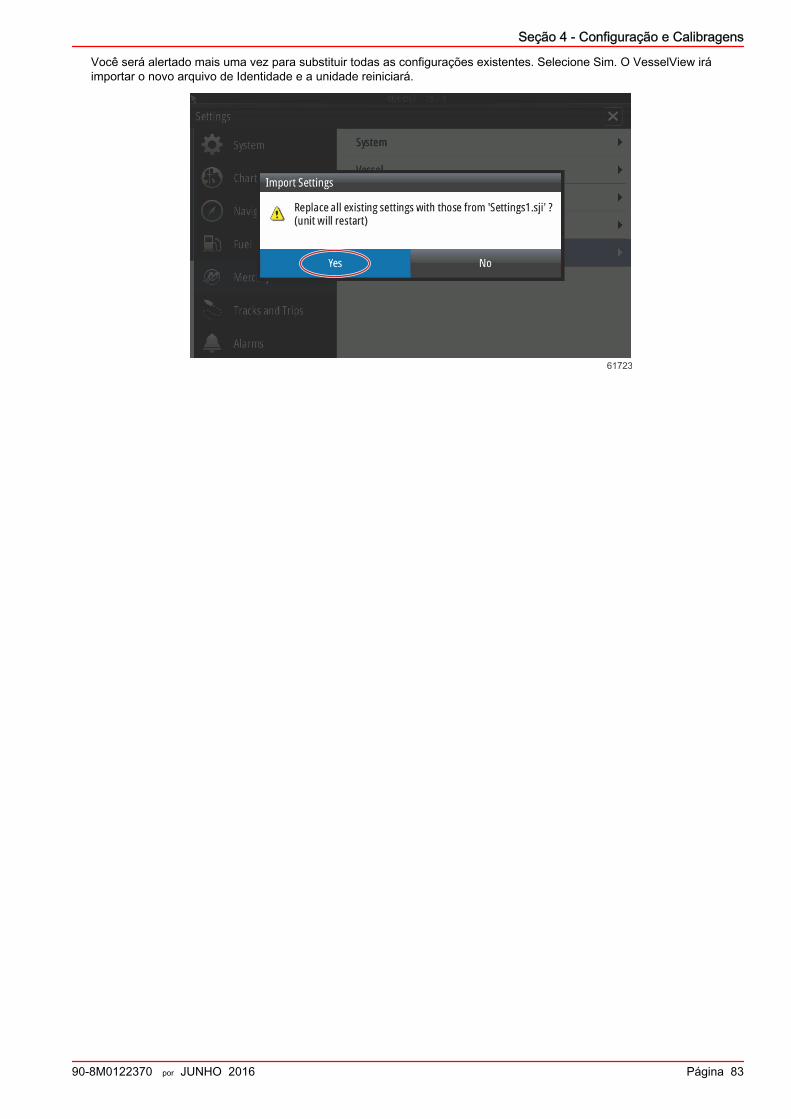
Seção 4 - Configuração e Calibragens
90-8M0122370 por JUNHO 2016 Página 83
Você será alertado mais uma vez para substituir todas as configurações existentes. Selecione Sim. O VesselView iráimportar o novo arquivo de Identidade e a unidade reiniciará.
61723

Seção 4 - Configuração e Calibragens
Notas:
Página 84 90-8M0122370 por JUNHO 2016

Seção 5 - Alarmes de advertência
90-8M0122370 por JUNHO 2016 Página 85
Seção 5 - Alarmes de advertênciaÍndiceAdvertências—Falhas e alarmes...................................... 86 Águas Rasas e Alarmes de Combustível Baixo
........................................................................... 88
5
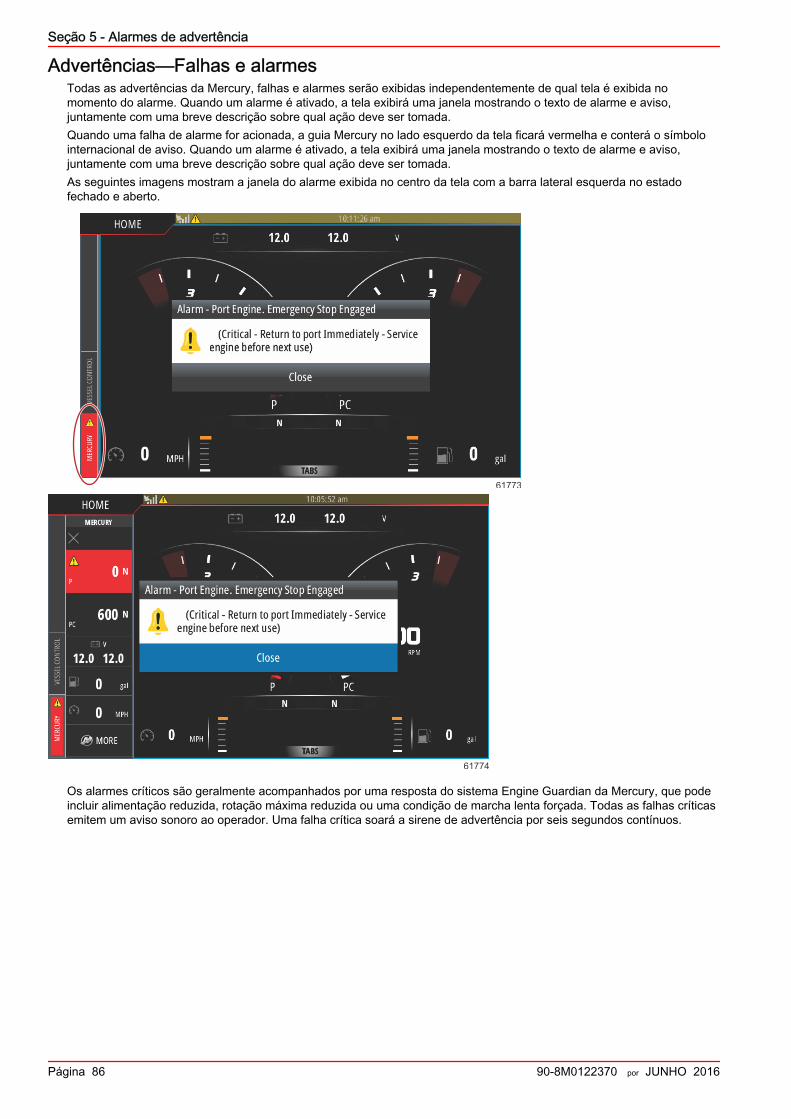
Seção 5 - Alarmes de advertência
Página 86 90-8M0122370 por JUNHO 2016
Advertências—Falhas e alarmesTodas as advertências da Mercury, falhas e alarmes serão exibidas independentemente de qual tela é exibida nomomento do alarme. Quando um alarme é ativado, a tela exibirá uma janela mostrando o texto de alarme e aviso,juntamente com uma breve descrição sobre qual ação deve ser tomada.Quando uma falha de alarme for acionada, a guia Mercury no lado esquerdo da tela ficará vermelha e conterá o símbolointernacional de aviso. Quando um alarme é ativado, a tela exibirá uma janela mostrando o texto de alarme e aviso,juntamente com uma breve descrição sobre qual ação deve ser tomada.As seguintes imagens mostram a janela do alarme exibida no centro da tela com a barra lateral esquerda no estadofechado e aberto.
61773
61774
Os alarmes críticos são geralmente acompanhados por uma resposta do sistema Engine Guardian da Mercury, que podeincluir alimentação reduzida, rotação máxima reduzida ou uma condição de marcha lenta forçada. Todas as falhas críticasemitem um aviso sonoro ao operador. Uma falha crítica soará a sirene de advertência por seis segundos contínuos.
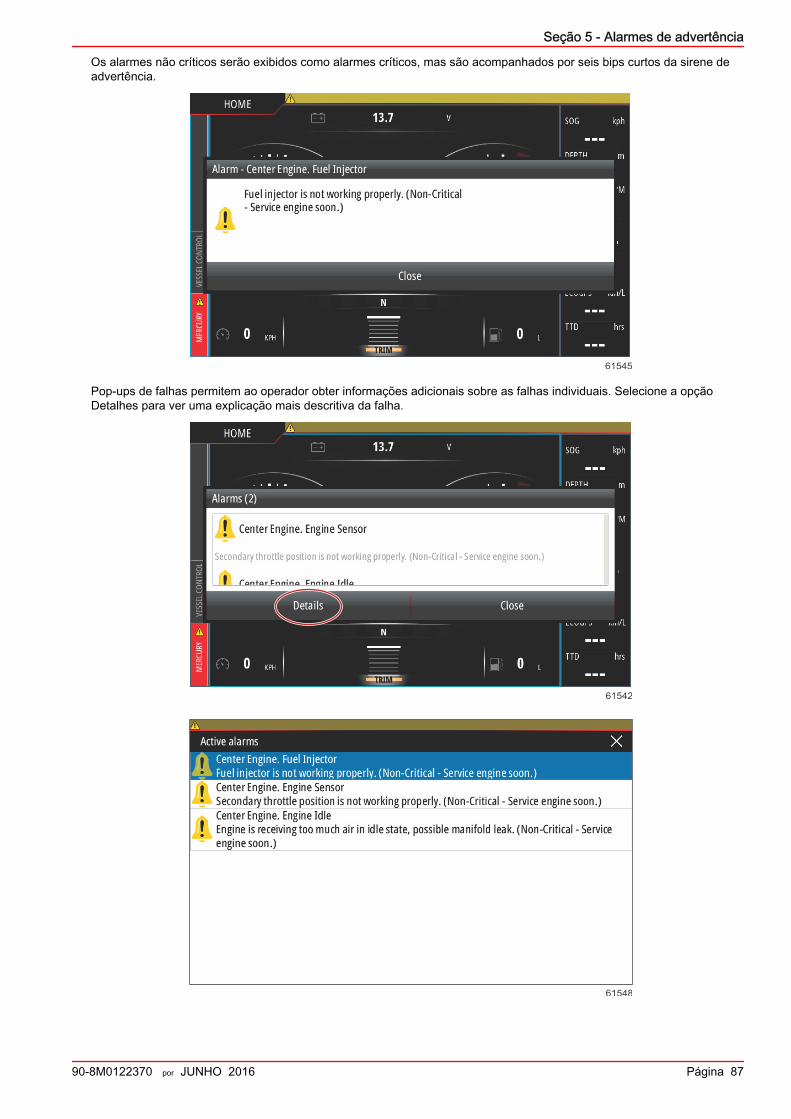
Seção 5 - Alarmes de advertência
90-8M0122370 por JUNHO 2016 Página 87
Os alarmes não críticos serão exibidos como alarmes críticos, mas são acompanhados por seis bips curtos da sirene deadvertência.
61545
Pop-ups de falhas permitem ao operador obter informações adicionais sobre as falhas individuais. Selecione a opçãoDetalhes para ver uma explicação mais descritiva da falha.
61542
61548

Seção 5 - Alarmes de advertência
Página 88 90-8M0122370 por JUNHO 2016
Para reconhecer a falha e retornar à tela principal do VesselView, selecione o X no canto superior direito da janela deAlarmes ativos, ou selecione a opção Fechar na janela inicial de pop-up.Quaisquer alarmes ativos e falhas de aviso permanecerão acessíveis na guia Mercury no lado esquerdo da tela.
61546
Para limpar uma falha ativa, inspecione, repare ou substitua a peça defeituosa ou com falha e inicie os motores e oVesselView e deixe a unidade passar pela varredura de inicialização do sistema. Se o barco passar pela varredura deinicialização, a guia Mercury no lado esquerdo da tela ficará verde. O histórico de alarme sempre poderá ser vistoselecionando a tela do menu principal e depois escolhendo a opção Alarmes. Aqui, o histórico de falhas pode servisualizado.
Águas Rasas e Alarmes de Combustível BaixoPara falhas não críticas tais como Águas rasas e combustível baixo, seis bipes curtos soarão e uma pop-up aparecerá natela com uma breve descrição da falha.Estes tipos de falhas não mudarão a guia Mercury para vermelho. Em vez disso, a barra de cabeçalho superior ficarávermelha e exibirá o símbolo de advertência internacional.
61778
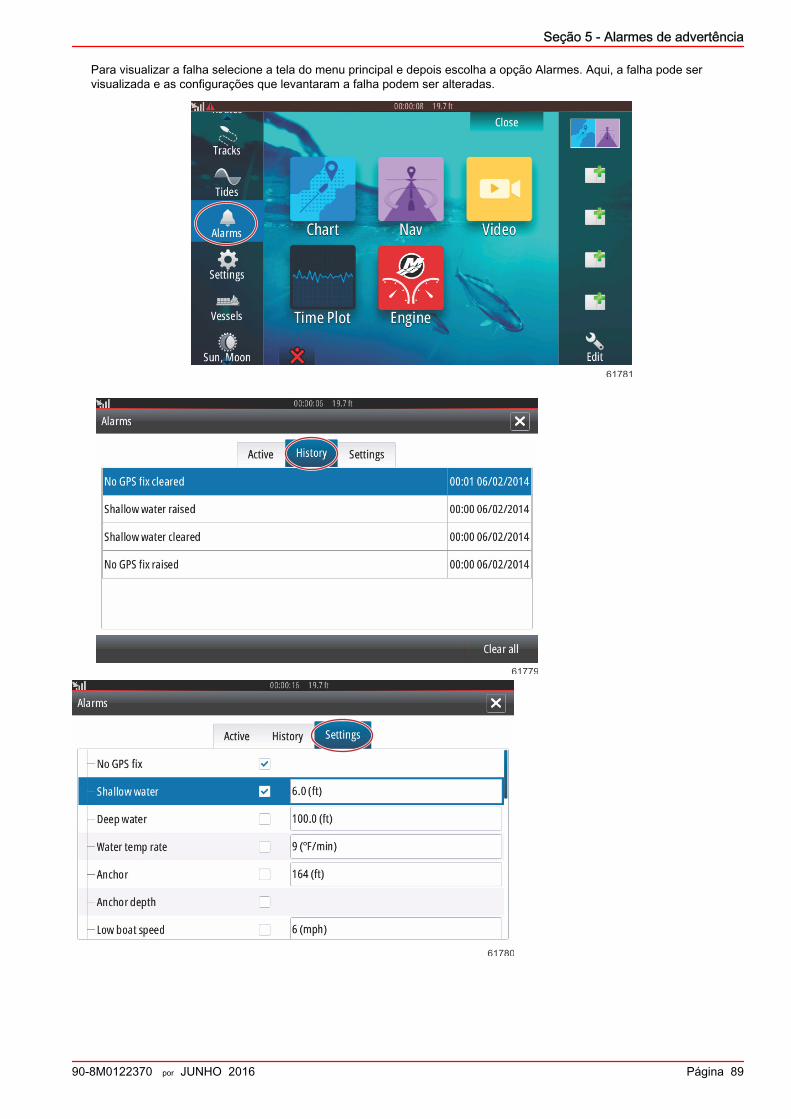
Seção 5 - Alarmes de advertência
90-8M0122370 por JUNHO 2016 Página 89
Para visualizar a falha selecione a tela do menu principal e depois escolha a opção Alarmes. Aqui, a falha pode servisualizada e as configurações que levantaram a falha podem ser alteradas.
61781
61779
61780