Embed Size (px)
Citation preview

VII Seminário da Pós-graduação em Engenharia Mecânica
COMPARATIVO DE ESTRATÉGIAS DE CONTROLE DE VIBRAÇÕES EM UMA
VIGA MODELADA COM ELEMENTOS ESPECTRAIS
Mauro Cesar Menão
Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru
Prof. Dr. Paulo José Paupitz Gonçalves
Orientador – Depto de Engenharia Mecânica – Unesp – Bauru
RESUMO Com o crescente busca por eficiência nos projetos mecânicos envolvendo o assunto
de controle de vibrações, as estratégias de controles passivos usualmente modificam e
adicionam massa a estrutura ao utilizar elementos de dissipação de energia. Esse trabalho tem
o objetivo de demonstrar diferentes estratégias de controle de vibração aplicadas á uma viga
engastada, envolvendo o controle ativo das vibrações, aplicados a uma viga engastada. O
sistema mecânico da viga foi modelado utilizando elementos espectrais, cujas equações do
movimento no domínio da frequência não são aproximações como no usual método de
elementos finitos, permitindo uma resposta precisa do sistema utilizando poucos elementos no
modelo dinâmico. As simulações numéricas, com auxilio do software Matlab®, demonstram
diferentes estratégias de controle das vibrações utilizando controle de feedforward. A posição
da força de controle é estuda em termos de função de controle ótimo, visando maximizar a
performance e evitar a instabilidade na estrutura, que é uma possibilidade nos controles
ativos. As simulações são desenvolvidas para identificar a posição da força de controle,
identificando instabilidades e distribuição dos sensores ao longo da viga.
PALAVRAS-CHAVE: Controle de Vibrações, Método dos elementos espectrais, Controle
feedforward.
1 INTRODUÇÃO
Com a crescente necessidade de projeto mecânico para atingir alta eficiência, os
sistemas estruturais dinâmicos estão cada vez mais flexíveis e muitas vezes possuem baixo
coeficiente de amortecimento, que pode causar vibrações e instabilidade comprometer o
desempenho do sistema. Um método para eliminar este problema é realizar o controle de
vibração, a qual pode ser feita por métodos passivos ou ativos, em que o objetivo principal é a
redução das amplitudes dos deslocamentos de uma estrutura ao longo de um intervalo de
frequência de excitação.
Estratégias de controle passivo são geralmente associadas à modificação estrutural
através da adição de massa. Normalmente, adicionando amortecimento como materiais
viscoelásticos, amortecedores de fricção, amortecedores ajustados com base- isolamento que
têm sido. Sua principal função é dissipar a energia interna do sistema na forma de calor. Uma
característica importante dos sistemas passivos é a sua incapacidade para desestabilizar a
estrutura, porque nenhuma energia externa é adicionada ao sistema.
Outra estratégia para controlar a vibração é a utilização de métodos ativos, que utiliza
uma fonte de alimentação externa por aplicação de forças secundárias para controlar a
estrutura. Geralmente, estas forças são aplicadas por meio de uma lei de controle com
entradas em medições de velocidades de deslocamento (ou acelerações) da estrutura.

VII Seminário da Pós-graduação em Engenharia Mecânica
Normalmente, o controlo ativo, as forças são inseridas na armação por meio de
materiais "inteligentes", que podem produzir uma tensão mecânica, com uma entrada
específica de um sinal elétrico. Os materiais piezoeléctricos vêm com grande ênfase na área
dos sensores de medição, a principal capacidade de inovação, ambos medidos (sensor) e, se
for de interesse, como a função do atuador. Os materiais piezoeléctricos mais comuns são o
PZT de (titanato zirconato de chumbo) e PVDF (polivinilideno Fluoreto ), que podem
funcionar como sensores ou actuadores , devido ao seu efeito directo e indirecto conhecido,
ou seja, o sensor de sofrer deformação que produz uma diferença de potencial pode ser
medido e , no outro caso , se receber uma diferença de potencial vai responder com uma
deformação . Veja a figura 1 abaixo. ( Prazzo , Carlos Eduardo , 2011) .
Figura 1 – Viga com atuador piezoelétrico
As estratégias mais conhecidas de controle ativo é o feedback e feedforward. Neste
artigo, vamos explorar as possibilidades de um controle de controle feedforward ideal.
O conceito de um controle antecipado baseia-se no princípio da sobreposição de sistemas
lineares, isto é, ondas de entrada no sistema por um atuador para controlar e eliminar a
perturbação onda causa interferência. O diagrama de blocos que ilustra esta estratégia é
apresentada na figura 2:
Figura 2 – Diagrama de blocos de um controlador Feedforward
Onde:
Fd = Força de distúrbio;
Fc = Força de controle;
Y(n,d) = Matriz mobilidade da viga, relacionada a Fd com a velocidade no ponto da
viga.
Y(n,c) = Matriz mobilidade da viga, relacionada a Fc com a velocidade no ponto da
viga.
Hf = Controlador Feedforward.
W Velocidade de interesse na viga.
2 MODELO MATEMÁTICO
O método dos elementos finitos é o hoje o mais utilizado e aceito na análise estrutural.
Neste método, as soluções estáticas são utilizados com grande êxito para os problemas

VII Seminário da Pós-graduação em Engenharia Mecânica
estáticos, em que o sistema está dividido em vários elementos que constituem a geometria do
corpo, com as condições de fronteira e o carregamento de determinados.
À medida que a evoluir de estática para o problema dinâmico, a solução deve
convergir para valores aceitáveis, que envolvem, geralmente, aumentando o número de
elementos do sistema, em relação ao problema estático, em que os elementos são aumentados
em proporção com o aumento da frequência. Com o grande número de elementos de
simulações são mais longas e, por vezes, a partir de um tempo viável.
Uma alternativa é o uso de elementos espectrais que se baseia na solução exata da
equação da viga, ao contrário da aproximação polinomial de elementos finitos. As funções
trigonométricas e hiperbólicas são incorporadas na resposta de frequência, resultando em
elemento de resposta dinâmica exata.
Vários artigos têm explorado o método em comparação com o método tradicional de
elementos finitos, com resultados satisfatórios (preto Thomas, 2005), (Lee, Kim, Leung,
2000).
Outro método conhecido de modelagem é a matriz de impedância. Apesar de bem
documentada (Rubin, 1967), esta técnica começou a ser usado mais recentemente. Sua
principal vantagem é que , ao contrário do método de matrizes de transferência , as matrizes
são expressas diretamente em termos de funções de resposta em frequência.
Considere uma viga de Euler- Bernoulli que pode ser modelada pela equação
diferencial parcial:
𝐸. 𝐼.𝜕4𝜔 𝑥
𝜕𝑥4+ 𝜌.𝑆.
𝜕2𝜔 𝑥, 𝑡
𝜕𝑡2= −𝑓 𝑥, 𝑡
(1)
Onde:
E = Módulo de Young;
I= momento de inércia I;
x = posição relativa no feixe;
ρ = densidade do material;
S = área da secção transversal;
t = tempo;
O sistema mostra a equação 1 pode ser representado no domínio de frequência através
da utilização de matrizes de impedância.
[ ] [ ] [ ] [ ] [ ] [ ] (2)
Onde:
[Y] = Matriz Mobilidade;
[Z] = Matriz Impedância;
[V] = Vetor velocidade;
[F] = Vetor Forças e momentos;
Aplicando as condições de contorno nas extremidades da viga (livre-livre) na figura 3,
temos a seguinte solução na equação 3:

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 3 – Modelo de viga livre-livre
[
]=
[
− − − − − −
]
[
]
(3)
Onde:
j = número complexo;
ρ = densidade do material;
S = área da secção transversal;
E = módulo de Young do material;
I = Momento de inércia de área da secção transversal da viga;
l = comprimento da viga;
ω frequência de excitação;
Ver o apêndice para mais equações da matriz de impedância;
Considerando-se um feixe com condições de contorno nas extremidades do tipo
engastada-livre, como mostrado na figura 4, as forças e velocidades no ponto 1 é igual a zero,
devido ao bloqueio dos graus de liberdade. Portanto, a equação da matriz de impedância e o
feixe são descritos como:
Figura 4 – Modelo de viga engastada-livre
[
] =
[
− − − − − −
] [
] (4)
[ ] =
[− − −
] *
+ (5)

VII Seminário da Pós-graduação em Engenharia Mecânica
No entanto, queremos introduzir uma força de controlo (Fc), para reduzir as
velocidades e os deslocamentos resultantes da aplicação de uma força de distúrbio (Fd).
Como nem sempre é fisicamente possível aplicação destas forças, no mesmo ponto, temos que
dividir a viga em dois elementos, como a figura 5:
Figura 5 – Modelo de viga dividida em dois elementos
As variáveis deste novo com dois elementos de viga são ilustrados na figura 6:
Figura 6 – Modelo de viga dividida em dois elementos e suas variáveis
Seguem as equações:
Equação da matriz de impedância para o primeiro elemento:
[
]=
[ − − − − − − ]
[
]
(6)
Equação da matriz de impedância par o segundo elemento:
[
]=
[ − − − − − − ]
[
]
(7)
Onde:
e
(8)

VII Seminário da Pós-graduação em Engenharia Mecânica
Unindo as matrizes de impedâncias dos dois elementos temos:
[
]
=
[ (− ) − ( )
− ( ) − ( )
( ) − ( (− )
(− )) (
− ) ( )
( ) (
− ) (
( )) − ( )
( ) − (− )
( ) ]
[
]
(9)
Eliminando os graus de liberdade relacionados as condições de contorno, temos:
[
]=
[ (
(− )
(− )) (
− ) ( )
(
− ) (
( −
)
(
)) − (
)
( ) − (− )
(
) ( −
)]
[
]
(10)
O mesmo raciocínio pode ser utilizado para uma viga com três elementos conforme a
figura 7 e 8:
Figura 7 – Modelo de viga dividida em três elementos
Figura 8 – Modelo de viga dividida em três elementos e suas variáveis
Seguem as formulações:

VII Seminário da Pós-graduação em Engenharia Mecânica
[
]
=
[ (− ) − ( )
− ( ) − ( )
( ) − ( (− )
(− )) (
− ) ( )
( ) (
− ) (
( )
( )) − ( )
( ) − ( (− )
(− )) (
− ) ( )
( ) (
− ) (
( )
( )) − ( )
( ) − (− )
( ) ( )]
[
]
(11)
[
]
=
[ ( (− )
(− )) (
− ) ( )
(
− ) (
( )
( )) − ( )
( ) − ( (− )
(− )) (
− ) ( )
( ) (
− ) (
( )
( )) − ( )
( ) − (− )
( ) ( )]
[
]
(12)
2.1 Controle Feedforward
Considerando duas forças que atuam sobre a viga, que a velocidade no ponto desejado
é a soma dos efeitos individuais das forças sobre a viga como se segue:
(13)
Onde:
n = ponto de controle;
ω frequência de excitação;
Yd = matriz mobilidade relacionada a Fd;
Yc = matriz mobilidade relacionada a Fc;
d = ponto da força de distúrbio;
c = ponto da força de controle;
Conforme a teoria de controle feedforward, um controlador com certo ganho é
calculado para minimizar qualquer quantidade física, no caso, a velocidade. São calculados
um ganho e uma fase relativos à força de distúrbio (Fd). Segue, portanto a equação seguinte:
( ) (14)
Onde:
Hf = Controlador feedforward;
Conforme (Fuller, Elliot, Nelson, 1996), uma função para controle ótimo pode ser
calculado da seguinte forma:
VII Seminário da Pós-graduação em Engenharia Mecânica
−( )
(15)
Nesta equação, o sensor está posicionado exatamente no ponto da força de controle
(c), onde o controlador Hff irá reduzir a velocidade neste ponto, sem considerar outros pontos
da viga.
Geralmente desejamos controlar um ponto determinado na viga, mas sem deixar que
outros pontos tenham resultados piores, podemos escrever o controlador ótimo para incluir
outros da viga, conforme a equação abaixo para uma viga de 2 elementos:
−([
]
[
])
[
]
[
] (16)
Para uma viga de três elementos:
−(*
+
*
+)
*
+
*
+
(17)
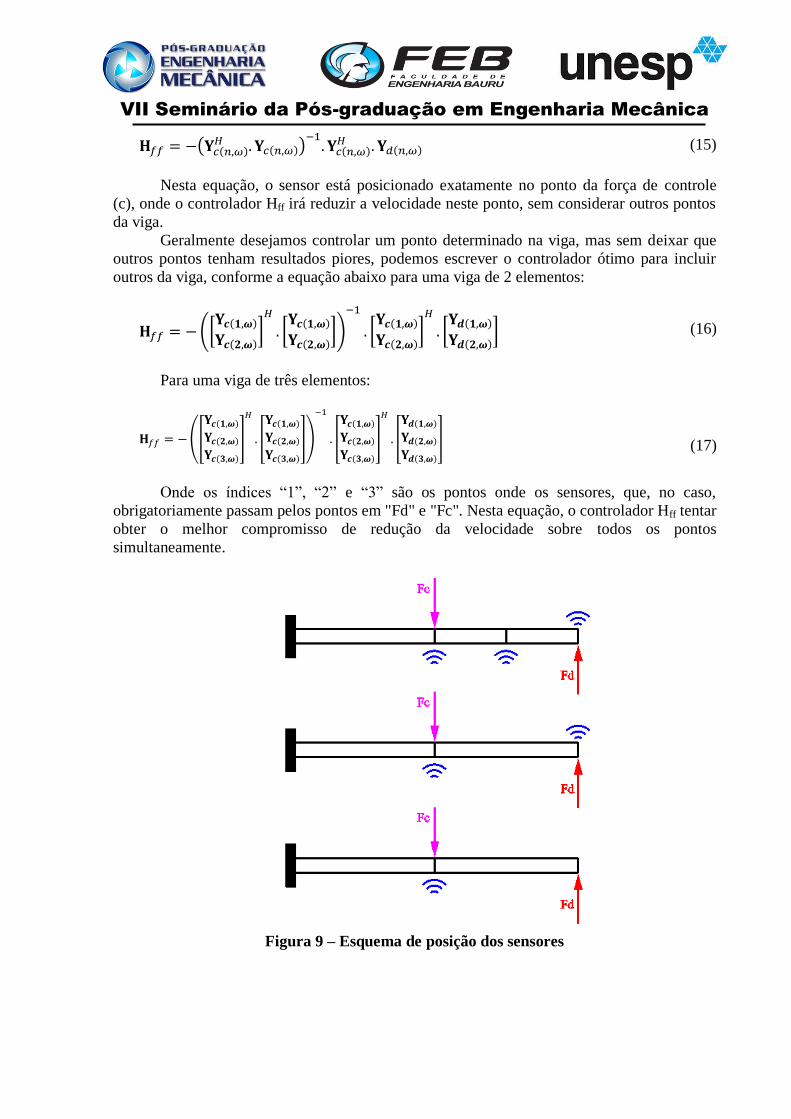
Onde os índices “1”, “2” e “3” são os pontos onde os sensores, que, no caso,
obrigatoriamente passam pelos pontos em "Fd" e "Fc". Nesta equação, o controlador Hff tentar
obter o melhor compromisso de redução da velocidade sobre todos os pontos
simultaneamente.
Figura 9 – Esquema de posição dos sensores
VII Seminário da Pós-graduação em Engenharia Mecânica
3 SIMULAÇÕES E RESULTADOS
O principal objetivo é controlar a velocidade em determinados pontos da viga para
faixa de frequências de excitação. O controle envolve a técnica de feedforward e será
executado posicionando “sensores” ao longo da viga.
Para as análises fixamos os parâmetros de uma viga engastada-livre com os seguintes
valores na tabela 1:
Tabela 1 – Parâmetros da viga para simulação
Comprimento (L): 0,5 metros
Secção transversal:
Retangular /
Largura: 25,4 mm
Espessura: 3 mm
Material:
Alumínio
= 2710 kg/m³
E = 7e10 Pa
Força de distúrbio (Fd): 1 N
Frequência de excitação:
a
Onde:
= 1° frequência natural
= 5° frequência natural
Primeiro, é necessário conhecer as frequências naturais e modos de vibrar da viga em
questão e os resultados são apresentados na tabela 2.
Tabela 2 – Frequências naturais da viga
Frequências naturais e equações dos modos de vibrar Modos de
vibrar Knb
Resultados
para ωn
𝜔 √𝐸 𝐼
𝜌 𝑆
𝑥 [ 𝑥 − 𝑥 ] − [ 𝑥 − 𝑥 ]
−
−
n=1
72,2 Hz
n=2
452,7 Hz
n=3
1267,6 Hz
n=4
2484 Hz
n=5
4106,3 Hz

VII Seminário da Pós-graduação em Engenharia Mecânica
n=6, 7, ... −
---
Os gráficos dos modos de vibrar, que mostram o deslocamento relativo em relação do
comprimento da viga, são demonstrados na Figura 10:
Figura 10 – Modos de vibrar da viga
Analisando o gráfico dos deslocamentos relativos pode-se concluir que os maiores
deslocamentos estão na extremidade livre e, portanto, esse ponto é o de maior interesse.
Outra observação é que os pontos de velocidade zero (nós) na viga mudam de acordo
com a frequência natural. Esta constatação é importante para o correto posicionamento do
sensor (es) e força de controle para atingir o objetivo de reduzir a vibração da viga.
A seguir, segue a velocidade da extremidade livre da viga com uma força de
perturbação posicionada na mesma extremidade, de acordo com a figura 7 e 8.
Figura 11 – Modelo de uma viga engastada com uma força de distúrbio F2
Desenvolvendo da equação 2:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Modos de vibrar => Viga engastada-livre
Comprimento da viga [m]
Raiz modo 1 =0.00
Raiz modo 2 =0.00 /0.39Raiz modo 3 =0.00 /0.25 /0.43Raiz modo 4 =0.00 /0.18 /0.32 /0.45Raiz modo 5 =0.00 /0.14 /0.25 /0.36 /0.46
Viga estática
Modo 1 =1(9.9 Hz)
Modo 2 =2(61.7 Hz)
Modo 3 =3(173.3 Hz)
Modo 4 =4(338.8 Hz)
Modo 5 =5(560.0 Hz)

VII Seminário da Pós-graduação em Engenharia Mecânica
*
+ [
] (18)
Figura 12 – Velocidade na extremidade livre da viga – Sem controle – 1 elemento
Os vales observados ao longo das frequências de excitação do gráfico significam que a
velocidade, e consequentemente, o deslocamento da viga são mínimas.
. Utilizando a técnica de feedforward, colocando uma força de controle em L2 = 50%
L e o sensor no mesmo ponto, temos a viga representada na figura 13:
Figura 13 – Modelo de uma viga engastada com uma força de distúrbio F3 e uma força
de controle F2
Desenvolvendo da equação 12:
[
]
[
] (16)
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade na extremidade (sem força de controle)
Frequência[Hz]
Mobili
dade [
m/s
.N]
9.9Hz 61.7Hz 172.9Hz 338.8Hz 560.0Hz
Viga sem força de controle
Frequências naturais por fórmulas
VII Seminário da Pós-graduação em Engenharia Mecânica
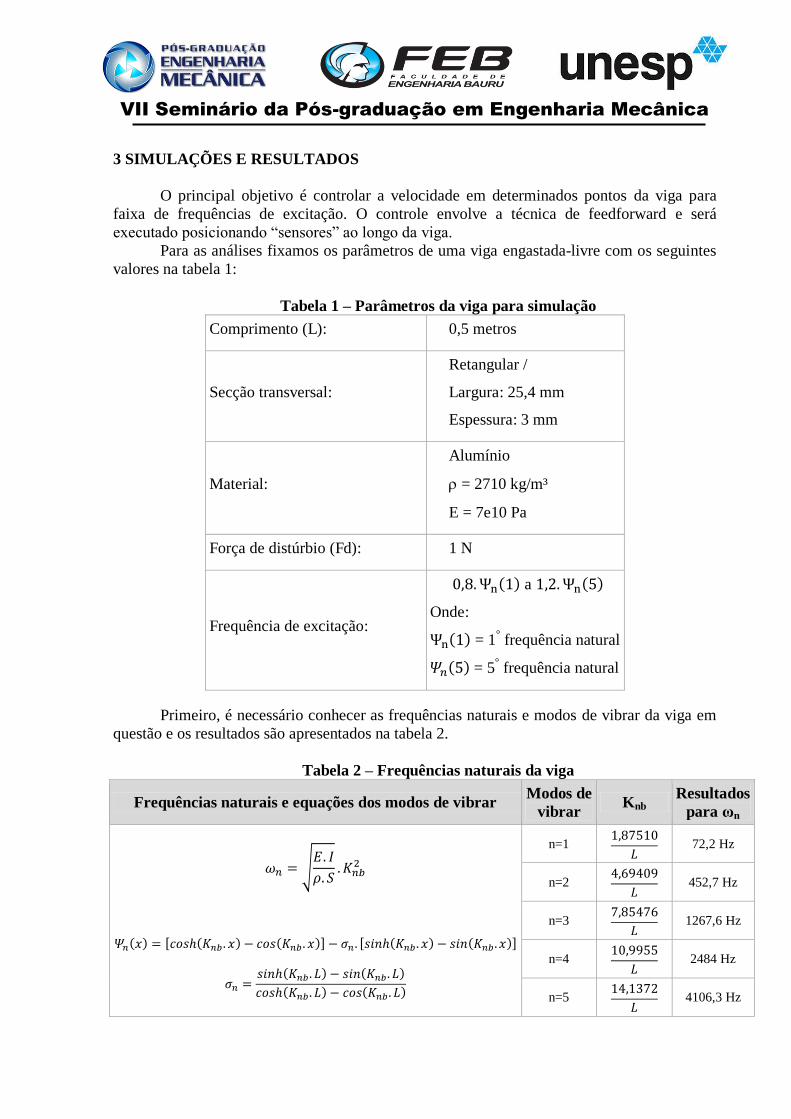
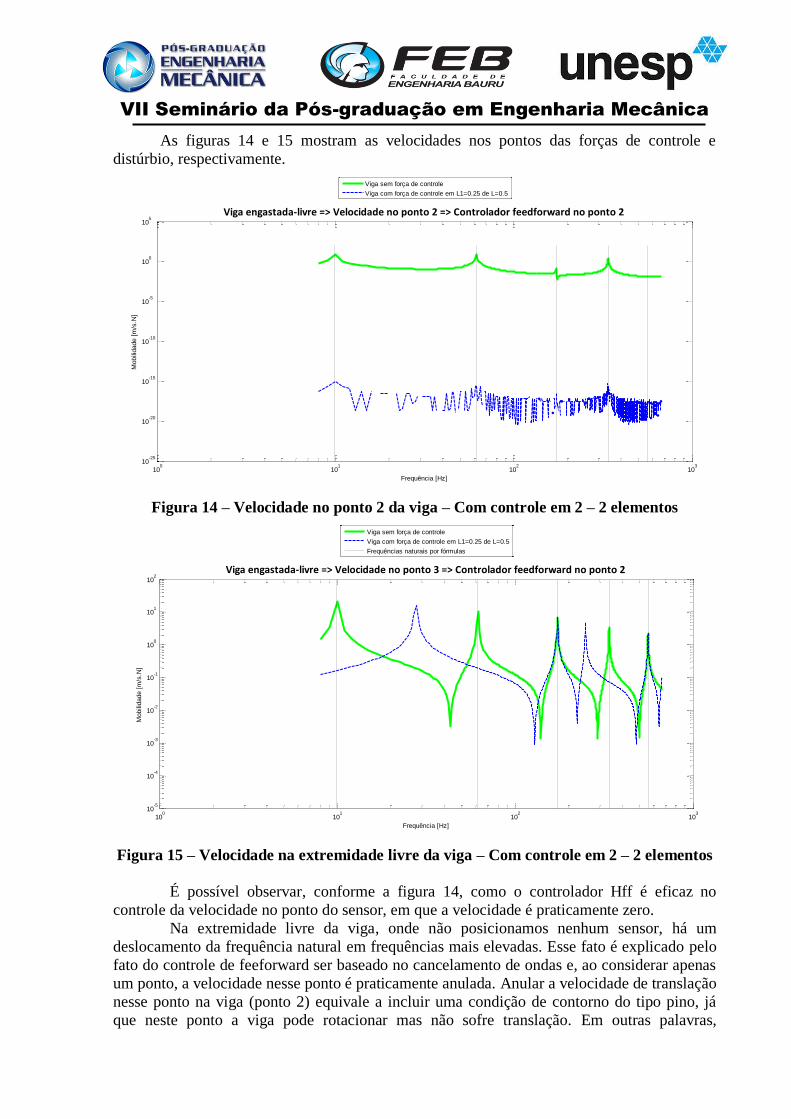
As figuras 14 e 15 mostram as velocidades nos pontos das forças de controle e
distúrbio, respectivamente.
Figura 14 – Velocidade no ponto 2 da viga – Com controle em 2 – 2 elementos
Figura 15 – Velocidade na extremidade livre da viga – Com controle em 2 – 2 elementos
É possível observar, conforme a figura 14, como o controlador Hff é eficaz no
controle da velocidade no ponto do sensor, em que a velocidade é praticamente zero.
Na extremidade livre da viga, onde não posicionamos nenhum sensor, há um
deslocamento da frequência natural em frequências mais elevadas. Esse fato é explicado pelo
fato do controle de feeforward ser baseado no cancelamento de ondas e, ao considerar apenas
um ponto, a velocidade nesse ponto é praticamente anulada. Anular a velocidade de translação
nesse ponto na viga (ponto 2) equivale a incluir uma condição de contorno do tipo pino, já
que neste ponto a viga pode rotacionar mas não sofre translação. Em outras palavras,
100
101
102
103
10-25
10-20
10-15
10-10
10-5
100
105
Viga engastada-livre => Velocidade no ponto 2 => Controlador feedforward no ponto 2
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.25 de L=0.5
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade no ponto 3 => Controlador feedforward no ponto 2
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.25 de L=0.5
Frequências naturais por fórmulas

VII Seminário da Pós-graduação em Engenharia Mecânica
podemos entender que o modelo dinâmico da viga foi alterado pela inclusão do controlador
nesse único ponto.
Posicionando a força de controle em valores de L2 = 20%, 40%, 60%, 80% do
comprimento L, é possível observar o deslocamento da frequência em relação à posição do
controlador, tal como mostra a figura 16.
Figura 16 – Velocidade na extremidade livre da viga – Com controle em 2 – 2 elementos
É importante notar que a força de controle estando posicionada em 80% de L, ou
seja, uma distância de 0,4 m da extremidade engastada, o controle da frequência não é eficaz
no segundo modo de vibrar. Isto é explicado pelo fato da força de controle estar posicionada
muito próxima no ponto de velocidade zero (raiz) do segundo modo de vibração, como
podemos ver na figura 10.
Modificando a estratégia e incluindo um segundo sensor de velocidade no
controlador, posicionados no ponto da força de controle e na extremidade livre da viga,
visamos obter o melhor compromisso entre as velocidades nesses dois pontos.
Aplicando o novo controlador temos os seguintes resultados na Figura 18 e 19:
Figura 17 – Modelo de uma viga engastada com uma força de distúrbio F3 e uma força
de controle F2 – 2 sensores
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade no ponto 3 => Controlador feedforward no ponto 2 - Várias posições da força de controle
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.2 de L=0.5
Viga com força de controle em L1=0.3 de L=0.5
Viga com força de controle em L1=0.4 de L=0.5

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 18 – Velocidade no ponto 2 da viga – Controle em 2 posições – 2 elementos
Figura 19 – Velocidade na extremidade da viga – Controle em 2 posições – 2 elementos
Podemos notar que as velocidades foram significativamente reduzidas nos pontos de
frequência natural em relação à viga sem controle.
Na figura 20 podemos ver o comportamento do controlador para várias posições da
força de controle.
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade no ponto 2 => Controlador feedforward com 2 pontos
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.25 de L=0.5
Frequências naturais por fórmulas
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade no ponto 3 => Controlador feedforward com 2 pontos
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.25 de L=0.5
Frequências naturais por fórmulas

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 20 – Velocidade na extremidade livre da viga – Controle em 2 posições – 2
elementos
Para melhor compreender a eficiência do controle, podemos definir um índice de
atenuação de velocidade, I, definido conforme a seguinte equação:
𝐼
(17)
Onde:
Vf = Velocidade após a aplicação do controlador
V = Velocidade antes da aplicação do controlador
n = ponto desejado da viga;
ω = frequência de excitação;
Aplicando essa formulação, temos os resultados listados na figura 21 e na tabela 3.
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Viga engastada-livre => Velocidade no ponto 3 => Controlador feedforward com 2 pontos - Várias posições da força de controle
Frequência [Hz]
Mobili
dade [
m/s
.N]
Viga sem força de controle
Viga com força de controle em L1=0.2 de L=0.5
Viga com força de controle em L1=0.3 de L=0.5
Viga com força de controle em L1=0.4 de L=0.5

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 21 – Índice de atenuação para os pontos 2 e 3 – Controle em 2 posições – 2
elementos
Tabela 3 – Índice de atenuação – L2=50% de L
Modelo sem controle Modelo com controle
pontos 2 e 3
Pon
to 2
Índice de atenuação médio 1 242,2%
Índice de atenuação – Até 1°
frequência 1 5,9%
Índice de atenuação – 1°
frequência até 2° 1 64,5%
Índice de atenuação – 2°
frequência até 3° 1 122,2%
Índice de atenuação – 3°
frequência até 4° 1 287,3%
Índice de atenuação – 4°
frequência até 5° 1 239,6%
Pon
to 3
Índice de atenuação médio 1 43,1%
Índice de atenuação – Até 1°
frequência 1 0,7%
Índice de atenuação – 1°
frequência até 2° 1 69,9%
Índice de atenuação – 2°
frequência até 3° 1 49,6%
Índice de atenuação – 3°
frequência até 4° 1 52,3%
Índice de atenuação – 4°
frequência até 5° 1 43%
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
Índice de atenuação para o controlador feedforward
Frequência[Hz]
Índic
e d
e a
tenuação
Ponto2=5.9%Ponto3=0.7%
Ponto2=64.5%Ponto3=69.9%
Ponto2=122.2%Ponto3=49.6%
Ponto2=287.3%Ponto3=52.3%
Ponto2=239.6%Ponto3=43.0%
Índice de atenuação para o ponto 2 =>242.2%
Índice de atenuação para o ponto 3 =>43.1%

VII Seminário da Pós-graduação em Engenharia Mecânica
4 CONCLUSÕES
Como mostrado nas Figuras 10 e 12, o modelo dinâmico utilizando matriz de
mobilidade com elementos espectrais foi preciso ao comparar as frequências naturais do
modelo resultante e a frequência calculada pelas fórmulas exatas.
Para o modelo clássico de uma viga engastada-livre, como mostrado na figura 11,
confirmou-se que o controle feedforward é eficaz para controlar a velocidade no ponto em
que o sensor está localizado. No entanto, como mostrado na Figura 15, os pontos de
extremidade da viga, bem como outros pontos não são adequadamente controlados. Tal como
mostrado na Figura 14, a força de controle com o sensor localizado nesse ponto, reduz a
velocidade no ponto até praticamente ser anulado, simulando o comportamento de um pino e
modificando o modelo dinâmico da viga, alterando as frequências naturais e modos de vibrar
da viga.
Conclui-se ainda pela figura 16 de que o controlador com o sensor numa única
posição não é eficaz para reduzir a velocidade em todas as faixas de frequência de excitação,
fato devido a posição da força ser coincidente com um ponto de velocidade zero em algum
modo de vibração.
Usando a técnica de controle feedforward com dois sensores, demonstrou-se ser mais
eficaz no controle de todas as faixas de frequência, conforme mostrado nas Figuras 18, 19 e
20, sem qualquer controlo de frequência, como visto na Figura 16.
5 APÊNDICE
√𝜌 𝑆
𝐸 𝐼
√𝜔
−
−
−
−
REFERÊNCIAS BIBLIOGRÁFICAS

VII Seminário da Pós-graduação em Engenharia Mecânica
PRAZZO, CARLOS EDUARDO. “Modal Analysis of a Beam Structure Using Piezoelectric
Materials (PVDF) as Sensors”. Unesp – Ilha Solteira, 2011.
THOMAS BLACK. “Spectral Element Analysis of Bars, Beams, and Levy Plates”. Virginia
Polytechnic Institute, 2005.
USIK LEE, JOOHONG KIM, AND ANDREW Y. T. LEUNG. “The Spectral Element
Method in Structural Dynamics”. In The Shock and Vibration Digest, Nov2000.
S. RUBIN. “Mechanical immitance- and transmission-matrix concepts”. Journal of the
Acoustical Society of America 41, 1171-1179, 1967.
FRANK FAHY AND JOHN WALKER, 2004. “Advanced Applications in Acoustics, Noise
and Vibration”. Livro.
C.R. FULLER, S. J. ELLIOTT, AND P. A. NELSON, 1996. “Active Control of Vibration”.
Livro.