Embed Size (px)
Citation preview
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
FAKULTA STROJNÍHO INŽENÝRSTVÍ
ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A
BIOMECHANIKY
FACULTY OF MECHANICAL ENGINEERING
INSTITUTE OF SOLID MECHANICS, MECHATRONICS AND
BIOMECHANICS
STANOVENÍ TUHOSTI V MÍSTĚ HLAVY VŘETENÍKU
A PEVNOSTNÍ KONTROLA POJEZDOVÉ ČÁSTI
OBRÁBĚCÍHO CENTRA MCV 1220.
STIFFNESS ESTIMATION AT THE MACHINING HEAD AND THE STRENGTH ANALYSIS OF THE
MOVING PARTS OF THE MACHINING CENTER MCV 1220.
BAKALÁŘSKÁ PRÁCE BACHELOR´S THESIS
AUTOR PRÁCE MARTIN ZBOŽÍNEK AUTHOR
VEDOUCÍ PRÁCE prof. RNDr. Ing. JAN VRBKA, DrSc., dr. h. c. SUPERVISOR
BRNO 2009
BAKALÁ ŘSKÁ PRÁCE
3
Abstrakt
Cílem předložené práce bylo posouzení možností a omezení přístupů prosté
pružnosti při pevnostní a deformační analýze složené konstrukce a realizace
vlastního výpočtu. Pro úspěšné vypracování bylo nutné vytvořit jednodušší prutový
výpočtový model. Výpočet byl proveden pro tři případy zátěžných stavů ve střední a
krajní poloze smykadla. Byly získány hodnoty stykových sil a momentů ve vazbách a
hodnoty deformačních posuvů v místě hlavy vřeteníku. Z těchto výsledků byly určeny
tuhosti konstrukce v tomto místě. Byly také provedeny pevnostní kontroly
pojezdových částí obráběcího centra. Při řešení úlohy byly použity moderní
softwarové prostředky (Autodesk Inventor, ProENGINEER, ANSYS Workbench,
Maple, Mathcad, atd.). Obdržené výsledky byly porovnány s hodnotami získanými
pomocí metody konečných prvků.
Abstract
Main objective of the work was to estimate the possibilities and the limits of
elementary stress and strain analysis of the construction. At the beginning it was
necessary to simplify the problem to the 1-D bar problem. The calculation was
performed for three typical loading cases, namely for the middle and the border
position of the machining head. The contact forces and momentums and the
displacements at the machining head have been calculated. The obtained results
were then used for the stiffness evaluation of the construction at the machining head.
The strength analysis of the moving parts of the machinig center has been done, too.
Modern software products (Autodesk Inventor, ProENGINEER, ANSYS Workbench,
Maple, Mathcad, etc.) were used for the calculation. The results were compared with
The Finite Element Method results.
KLÍČOVÁ SLOVA
Mechanika, obráběcí centrum, pevnostní kontrola, prostá pružnost, tuhost.
KEY WORDS
Mechanics, machining center, strength analysis, elementary stress and strain analysis, stiffness.
BAKALÁ ŘSKÁ PRÁCE
4
BIBLIOGRAFICKÁ CITACE
ZBOŽÍNEK, M. Stanovení tuhosti v místě hlavy vřeteníku a pevnostní kontrola
pojezdové části obráběcího centra MCV 1220. Brno: Vysoké učení technické v Brně,
Fakulta strojního inženýrství, 2009. 69 s. Vedoucí bakalářské práce prof. RNDr. Ing.
Jan Vrbka, DrSc., dr. h. c.

BAKALÁ ŘSKÁ PRÁCE
5
PROHLÁŠENÍ
Prohlašuji, že jsem bakalářskou práci vypracoval pod vedením vedoucího
bakalářské práce a s použitím uvedených zdrojů.
Martin Zbožínek
………………….
BAKALÁ ŘSKÁ PRÁCE
6
PODĚKOVÁNÍ
Na tomto místě bych rád poděkoval vedoucímu bakalářské práce prof. RNDr.
Ing. Janu Vrbkovi, DrSc., dr. h. c. za jeho cenné rady a trpělivost při četných
konzultacích a za neúnavnou pomoc při hledání cesty ke zdárnému konci.
Dále bych chtěl poděkovat společnosti Tajmac-ZPS, a.s. za poskytnutí
potřebných podkladů a Ing. Martinu Machálkovi za odborné konzultace.
V neposlední řadě patří poděkování mým rodičům a bratrovi.
BAKALÁ ŘSKÁ PRÁCE
7
Obsah
1 Úvod 8
2 Popis obráb ěcího centra MCV 1220 9
2.1 Obráběcí stroj s označením MCV 1220 9
2.2 Popis kinematiky stroje 10
3 Formulace problém ů a jejich řešení 11
4 Výpočet užitím p řístup ů pružnosti 15
4.1 Zatížení silou Fx a tíhou celku smykadla FG 16
4.1.1 Výpočet pro střední polohu smykadla 23
4.1.2 Výpočet pro krajní polohu smykadla 30
4.2 Zatížení silou Fy a tíhou celku smykadla FG 33
4.2.1 Výpočet pro střední polohu smykadla 36
4.2.2 Výpočet pro krajní polohu smykadla 41
4.3 Zatížení silou Fz a tíhou celku smykadla FG 44
4.3.1 Výpočet pro střední polohu smykadla 47
4.3.2 Výpočet pro krajní polohu smykadla 49
5 Výpočet užitím p řístup ů pružnosti pro modifikaci vazeb 52
5.1 Zatížení silou Fy a tíhou celku smykadla FG 52
5.1.1 Výpočet pro střední polohu smykadla 55
5.1.2 Výpočet pro krajní polohu smykadla 58
6 Ověření výsledk ů pomocí metody kone čných prvk ů 61
7 Porovnání získaných výsledk ů 63
8 Závěr 64
9 Seznam použitých zdroj ů 65
10 Seznam použitých zkratek a symbol ů 66
11 Seznam p říloh 69
BAKALÁ ŘSKÁ PRÁCE
8
1 Úvod
Jedním z nejdůležitějších parametrů obráběcího stroje je jeho přesnost.
K docílení vysoké přesnosti je však nutno zajistit dostatečnou tuhost konstrukce
stroje. Tuhost je obecně definována jako poměr zatížení a daného přetvoření v místě
zatížení.
Je nezbytné tyto požadavky uvažovat již při konstrukčním návrhu stroje a
zároveň s konstrukčním řešením provádět i pevnostní a dynamickou analýzu.
Důležitým úkolem této analýzy je určení tuhosti obráběcího stroje nebo jeho částí.
Tato práce měla ověřit možnost použití přístupů prosté pružnosti při řešení
analýzy tuhosti moderního obráběcího stroje a porovnat toto řešení s analýzou
provedenou pomocí metody konečných prvků, která je dominantně zastoupena
v praktických aplikacích. Tato práce také měla ukázat možnost kombinace klasické
pružnosti a moderních výpočetních prostředků.

BAKALÁ ŘSKÁ PRÁCE
9
2 Popis obráběcího centra MCV 1220
2.1 Obráběcí stroj s označením MCV 1220
MCV 1220 je vertikální frézovací centrum typu horní gantry (portálové
obráběcí centrum s pojízdným příčníkem) se dvěma samostatnými, odnímatelnými
stoly nebo jedním pevným a jedním otočným stolem ve společném, případně
rozděleném, pracovním prostoru. Stroj může pracovat jako 3-osé nebo 5-osé
obráběcí centrum.
Vertikální frézovací centrum je určeno zejména pro oblast nástrojářství
s těžištěm uplatnění při obrábění součástí plochého nebo skříňového tvaru z oceli,
šedé litiny, slitin lehkých kovů a titanu.
Vzhledem k vysoké dynamice, velmi vysoké tuhosti a tlumicím vlastnostem
konstrukce stroj umožňuje využití výhod HSC technologie. [1]
HSC (High Speed Cutting) je technologie rychlostního obrábění využívající
poklesu tvrdosti řezných materiálů s jejich vzrůstající teplotou. Při tomto obrábění je
dosahováno řezných rychlostí vc > 1000 m·min-1.
Obr. 1. Obráběcí centrum MCV 1220. [1]
BAKALÁ ŘSKÁ PRÁCE
10
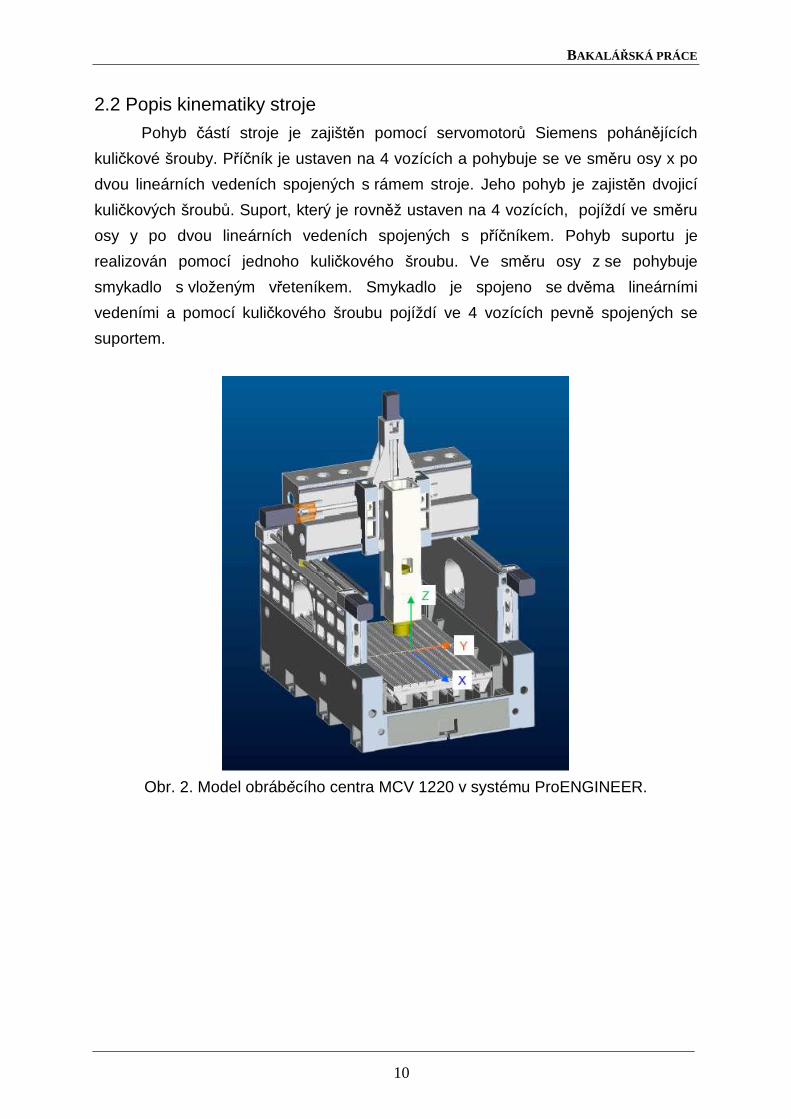
2.2 Popis kinematiky stroje
Pohyb částí stroje je zajištěn pomocí servomotorů Siemens pohánějících
kuličkové šrouby. Příčník je ustaven na 4 vozících a pohybuje se ve směru osy x po
dvou lineárních vedeních spojených s rámem stroje. Jeho pohyb je zajistěn dvojicí
kuličkových šroubů. Suport, který je rovněž ustaven na 4 vozících, pojíždí ve směru
osy y po dvou lineárních vedeních spojených s příčníkem. Pohyb suportu je
realizován pomocí jednoho kuličkového šroubu. Ve směru osy z se pohybuje
smykadlo s vloženým vřeteníkem. Smykadlo je spojeno se dvěma lineárními
vedeními a pomocí kuličkového šroubu pojíždí ve 4 vozících pevně spojených se
suportem.
Obr. 2. Model obráběcího centra MCV 1220 v systému ProENGINEER.
BAKALÁ ŘSKÁ PRÁCE
11
3 Formulace problémů a jejich řešení
Pružnost prutů úrovně I, tzv. prostá pružnost prutů, je pružnost zvláštní třídy
těles, které splňují tzv. prutové předpoklady a u níž se statická rovnováha vyšetřuje
na prvku uvolněném v nedeformovaném stavu. [2]
Prutové předpoklady:
a) geometrické:
- Prut je určen křivkou γ, tzv. střednicí, a v každém bodě střednice příčným
průřezem ψ, který obsahuje všechny body tělesa, ležící v normálové rovině.
Průsečík γ a ψ je geometrickým těžištěm T průřezu ψ.
- Střednice γ je spojitá a hladká křivka konečné délky.
- Příčný průřez je spojitá jedno nebo vícenásobně souvislá oblast, ohraničená
obrysem a charakterizovaná charakteristikami příčného průřezu.
- Délka střednice je řádově minimálně stejně velká jako největší rozměr
příčného průřezu.
b) vazbové a zatěžovací:
- Vazby omezují jen posuvy a úhly natočení střednice.
- Zatížení je soustředěno na střednici, tj. silovým působením na prut jsou
osamělé a liniové síly a silové dvojice s působištěm na střednici.
c) deformační:
- Střednice prutu zůstává v procesu deformace spojitá a hladká.
- Příčné průřezy zůstávají v průběhu deformace zase příčnými průřezy, tj.
zachovávají si rovinnost a kolmost k deformované střednici.
d) napjatostní
- Napjatost prutu je určena normálným a smykovým napětím v příčném průřezu.
Tento typ napjatosti se označuje jako tzv. prutová napjatost. [2]
BAKALÁ ŘSKÁ PRÁCE
12
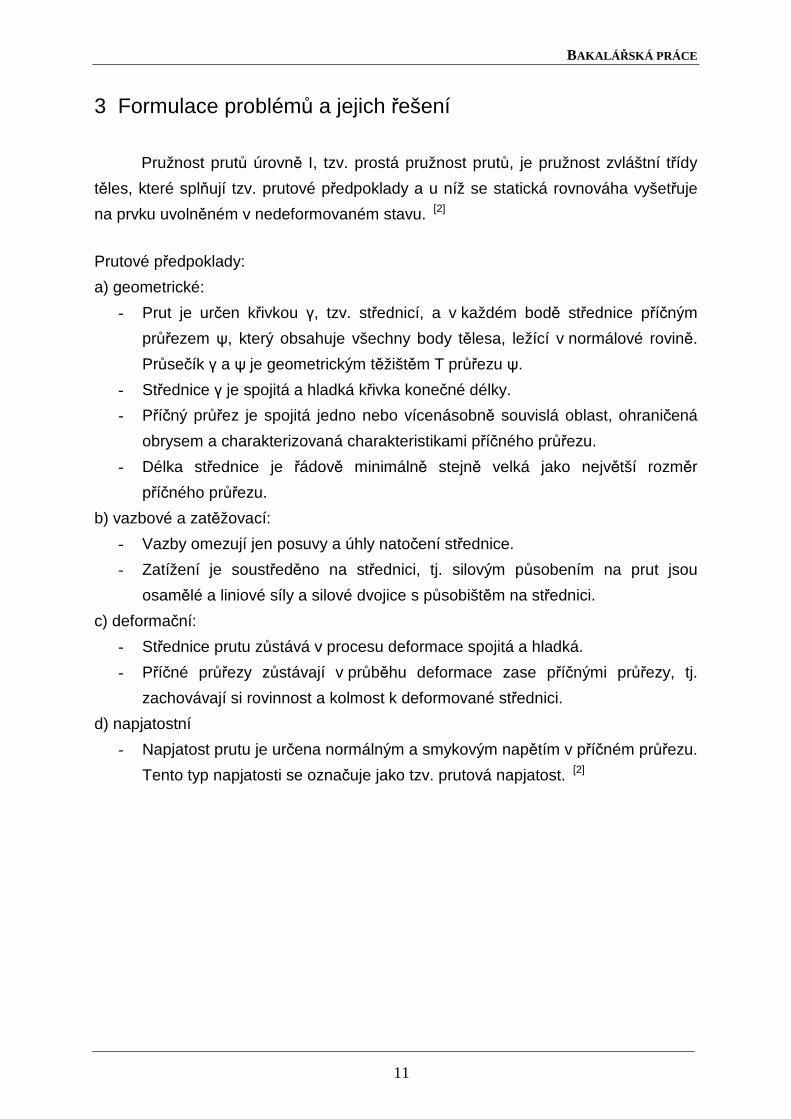
Úlohu je třeba zjednodušit tak, aby odpovídala výše uvedeným předpokladům.
⇒ Příčník nahradíme prutem konstantního nekruhového průřezu.
Obr. 3. Průřez příčníku.
⇒ Při vytváření modelu příčníku jsme vycházeli z výkresové dokumentace
součásti. Byly zachovány hlavní rozměry součásti a dané tloušťky stěn. U
spodní stěny příčníku jsme zvolili dominantní tloušťku.
⇒ Příčník je k rámu stroje vázán dvojicí kuličkových šroubů pohybujících se
v maticích a dvojicí rybinových vedení. Po těchto lineárních vedeních se
příčník pohybuje na čtyřech vozících.
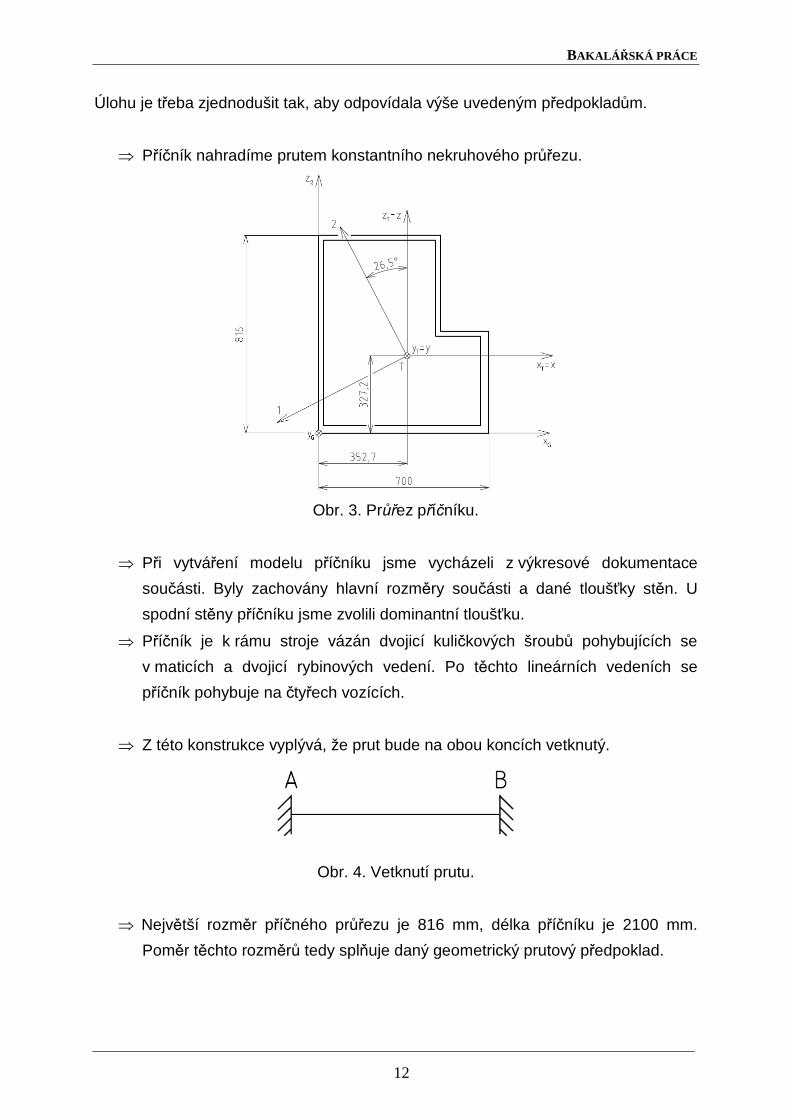
⇒ Z této konstrukce vyplývá, že prut bude na obou koncích vetknutý.
Obr. 4. Vetknutí prutu.
⇒ Největší rozměr příčného průřezu je 816 mm, délka příčníku je 2100 mm.
Poměr těchto rozměrů tedy splňuje daný geometrický prutový předpoklad.
BAKALÁ ŘSKÁ PRÁCE
13
⇒ Příčník je zatížen jednak vlastní tíhou, která odpovídá liniovému zatížení o
velikosti q = 6200,4 Nm-1 (vypočteno ze známé hmotnosti příčníku) působící
na střednici prutu, a dále tíhou celku smykadla (sestava suportu, vřeteníku,
smykadla, pohonu, kuličkových šroubů, matic a vedení) o velikosti FG =
13 243,5 N (vypočteno ze známé hmotnosti celku), která působí v místě
těžiště tohoto celku, jehož x-ová vzdálenost od střednice je xT = 437,3 mm
(odečteno z 3D modelu). Působením této síly je příčník namáhán ohybem a
krutem.
⇒ Prostý krut je definován pouze pro pruty kruhového nebo mezikruhového
průřezu. V tomto případě je však průřez prutu nekruhový.
⇒ Toto zatížení je tedy nutné řešit jako volný krut prizmatické tyče s nekruhovým
příčným průřezem, kde pro charakteristické veličiny platí:
- smykové napětí … δ
τ⋅⋅
=S
k
S
M
2
[3], (3.1)
- energie napjatosti … ∫ ⋅⋅=
γ
dySG
yMKW
S
k2
2
8
)( [3]. (3.2)
∫=mLds
K0 δ
... výpočtová konstanta (3.3)
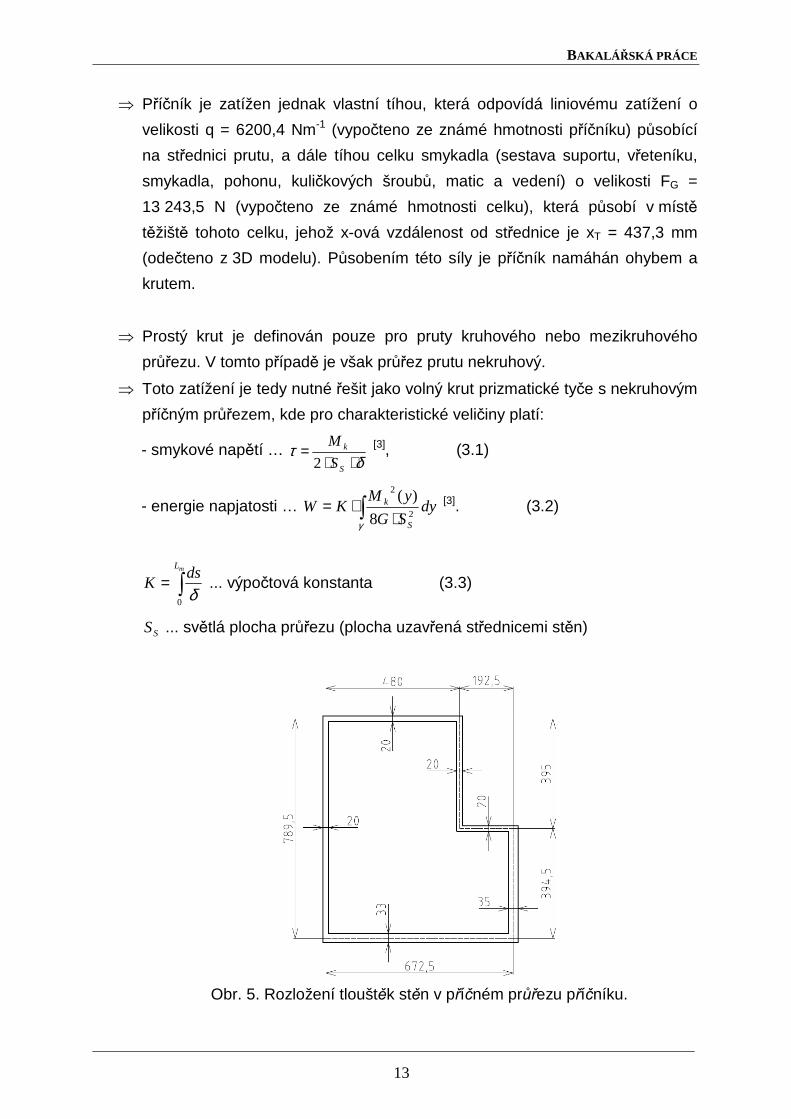
SS ... světlá plocha průřezu (plocha uzavřená střednicemi stěn)
Obr. 5. Rozložení tlouštěk stěn v příčném průřezu příčníku.

BAKALÁ ŘSKÁ PRÁCE
14
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ] 5,124
20
5,789
20
480
20
395
20
5,192
35
5,394
33
5,672
≅+
++++=
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mmK
(3.4)
[ ] [ ] [ ] [ ] 25105490,45,3945,1924805,789 mmmmmmmmmmSS ⋅≅⋅+⋅= (3.5)
⇒ K zjištění tuhosti příčníku v místě hlavy vřeteníku je nutné příčník v tomto
místě zatížit jmenovitou silou 4000 N působící v daném směru. Tato síla je
typická pro zatížení v axiálním i radiálním směru při hrubování.
BAKALÁ ŘSKÁ PRÁCE
15
4 Výpočet užitím přístupů pružnosti
Prut se nejprve úplně uvolní z vazeb, které se nahradí staticky ekvivalentními
stykovými výslednicemi. Poté se provede statický rozbor úlohy. V případě staticky
neurčité úlohy se provede částečné uvolnění na úroveň úlohy formálně staticky určité
a formulují se deformační podmínky pro stykové výslednice v uvolněných vazbách.
Ty se následně řeší pomocí Castiglianovy věty, přičemž se bere v úvahu energie
napjatosti od ohybu, krutu a tahu.
Vyřešením příslušných deformačních podmínek se získají hodnoty stykových
sil a momentů. Na základě průběhů ohybového momentu a krouticího momentu se
provede pevnostní kontrola a stanoví se také tuhost stroje. Do řešení je zde nutno
zahrnout rovněž poddajnost smykadla.
Výpočet se provede pro obecnou polohu smykadla označenou l.
BAKALÁ ŘSKÁ PRÁCE
16
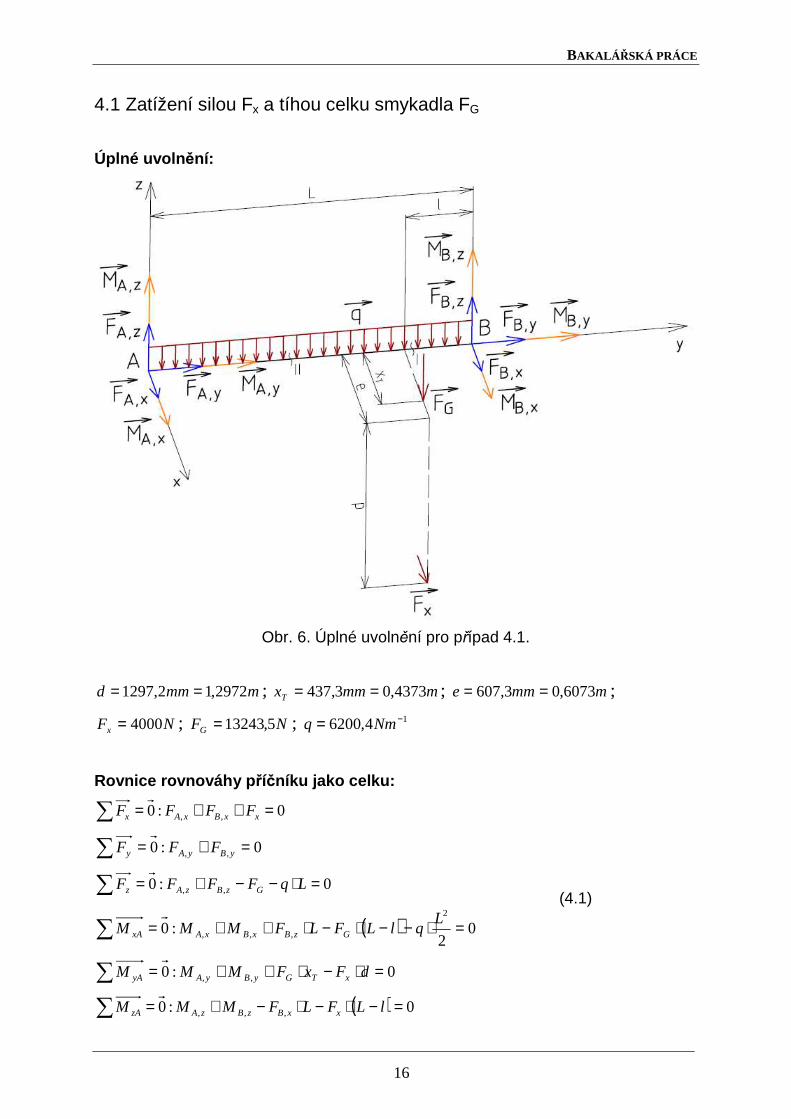
4.1 Zatížení silou Fx a tíhou celku smykadla FG
Úplné uvoln ění:
Obr. 6. Úplné uvolnění pro případ 4.1.
mmmd 2972,12,1297 == ; mmmxT 4373,03,437 == ; mmme 6073,03,607 == ;
NFx 4000= ; NFG 5,13243= ; 14,6200 −= Nmq
Rovnice rovnováhy p říčníku jako celku:
0:0 ,, =++=∑ xxBxAx FFFF
0:0 ,, =+=∑ yByAy FFF
0:0 ,, =⋅−−+=∑ LqFFFF GzBzAz
( ) 02
:02
,,, =⋅−−⋅−⋅++=∑L
qlLFLFMMM GzBxBxAxA
0:0 ,, =⋅−⋅++=∑ dFxFMMM xTGyByAyA
( ) 0:0 ,,, =−⋅−⋅−+=∑ lLFLFMMM xxBzBzAzA
(4.1)
BAKALÁ ŘSKÁ PRÁCE
17
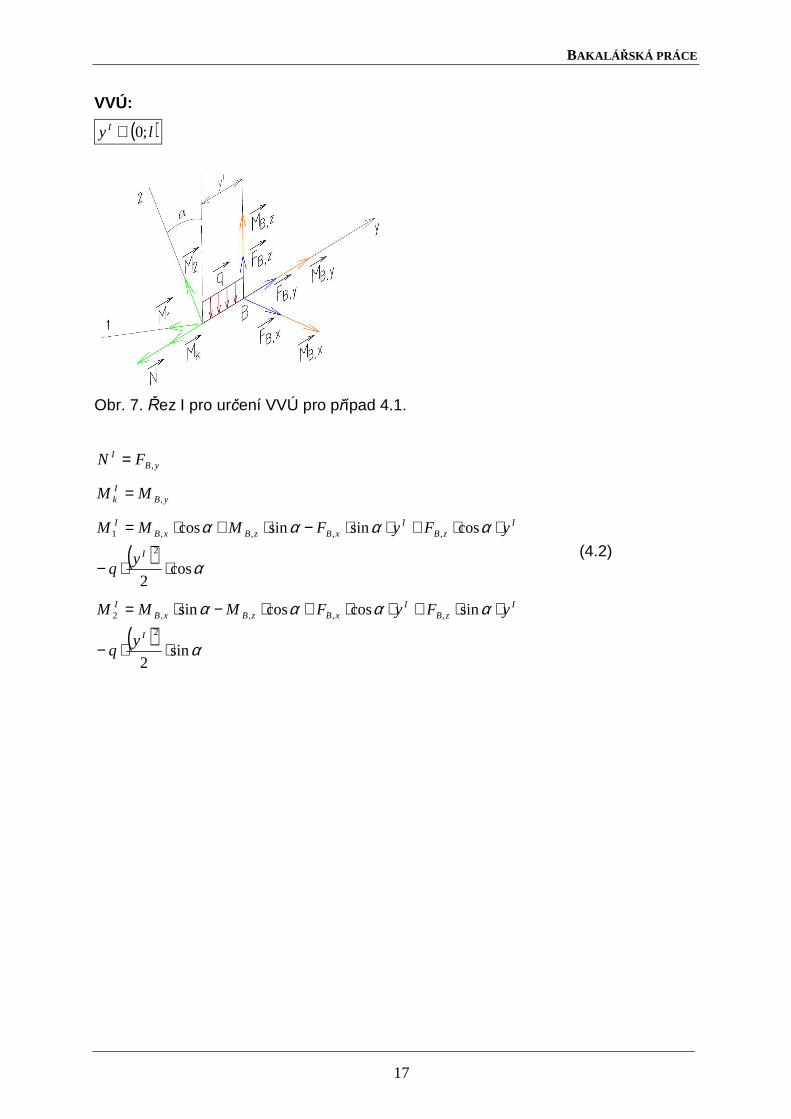
VVÚ:
( )ly I ;0∈
Obr. 7. Řez I pro určení VVÚ pro případ 4.1.
yBI FN ,=
yBIk MM ,=
( ) α
αααα
cos2
cossinsincos2
,,,,1
⋅⋅−
⋅⋅+⋅⋅−⋅+⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
(4.2)
( ) α
αααα
sin2
sincoscossin2
,,,,2
⋅⋅−
⋅⋅+⋅⋅+⋅−⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
BAKALÁ ŘSKÁ PRÁCE
18
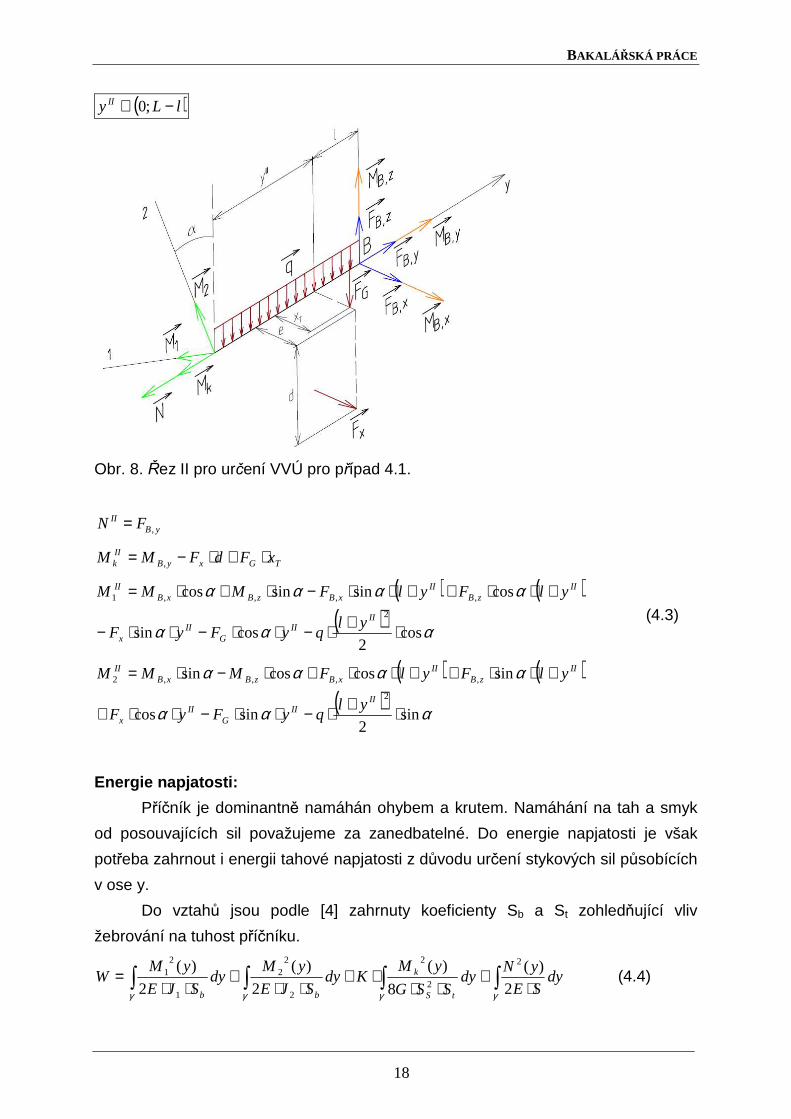
( )lLy II −∈ ;0
Obr. 8. Řez II pro určení VVÚ pro případ 4.1.
yBII FN ,=
TGxyBIIk xFdFMM ⋅+⋅−= ,
( ) ( )( ) ααα
αααα
cos2
cossin
cossinsincos2
,,,,1
⋅+⋅−⋅⋅−⋅⋅−
+⋅⋅++⋅⋅−⋅+⋅=II
IIG
IIx
IIzB
IIxBzBxB
II
ylqyFyF
ylFylFMMM
(4.3)
( ) ( )( ) ααα
αααα
sin2
sincos
sincoscossin2
,,,,2
⋅+⋅−⋅⋅−⋅⋅+
+⋅⋅++⋅⋅+⋅−⋅=II
IIG
IIx
IIzB
IIxBzBxB
II
ylqyFyF
ylFylFMMM
Energie napjatosti:
Příčník je dominantně namáhán ohybem a krutem. Namáhání na tah a smyk
od posouvajících sil považujeme za zanedbatelné. Do energie napjatosti je však
potřeba zahrnout i energii tahové napjatosti z důvodu určení stykových sil působících
v ose y.
Do vztahů jsou podle [4] zahrnuty koeficienty Sb a St zohledňující vliv
žebrování na tuhost příčníku.
∫ ∫ ∫ ∫ ⋅+
⋅⋅⋅+
⋅⋅+
⋅⋅=
γ γ γ γ
dySE
yNdy
SSG
yMKdy
SJE
yMdy
SJE
yMW
tS
k
bb 2
)(
8
)(
2
)(
2
)( 2
2
2
2
22
1
21 (4.4)
BAKALÁ ŘSKÁ PRÁCE
19
Stanovení statické ur čitosti úlohy:
{ }zByBxBzByBxBzAyAxAzAyAxA MMMFFFMMMFFFNP ,,,,,,,,,,,, ,,,,,,,,,,,=
12=µ
6=υ
6612 =−=−= υµs (4.5)
→ počet neznámých parametrů je vyšší než počet použitelných statických podmínek
→ úloha je 6x staticky neurčitá
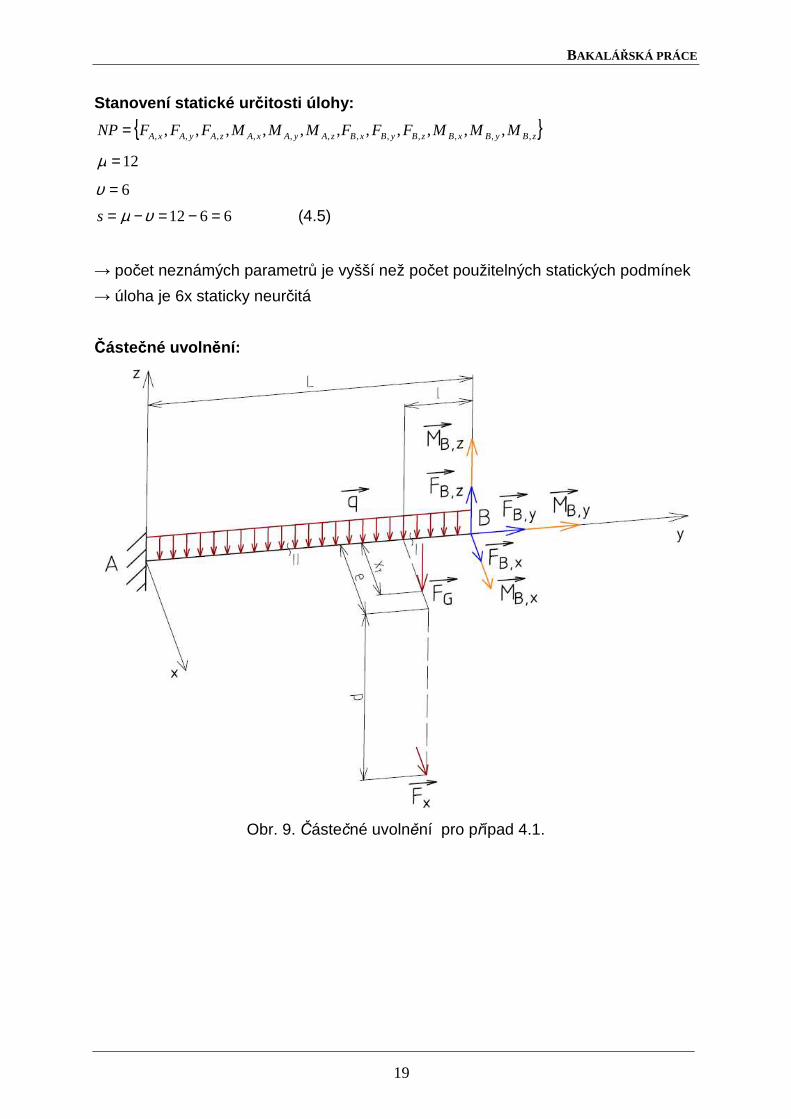
Částečné uvoln ění:
Obr. 9. Částečné uvolnění pro případ 4.1.
BAKALÁ ŘSKÁ PRÁCE
20
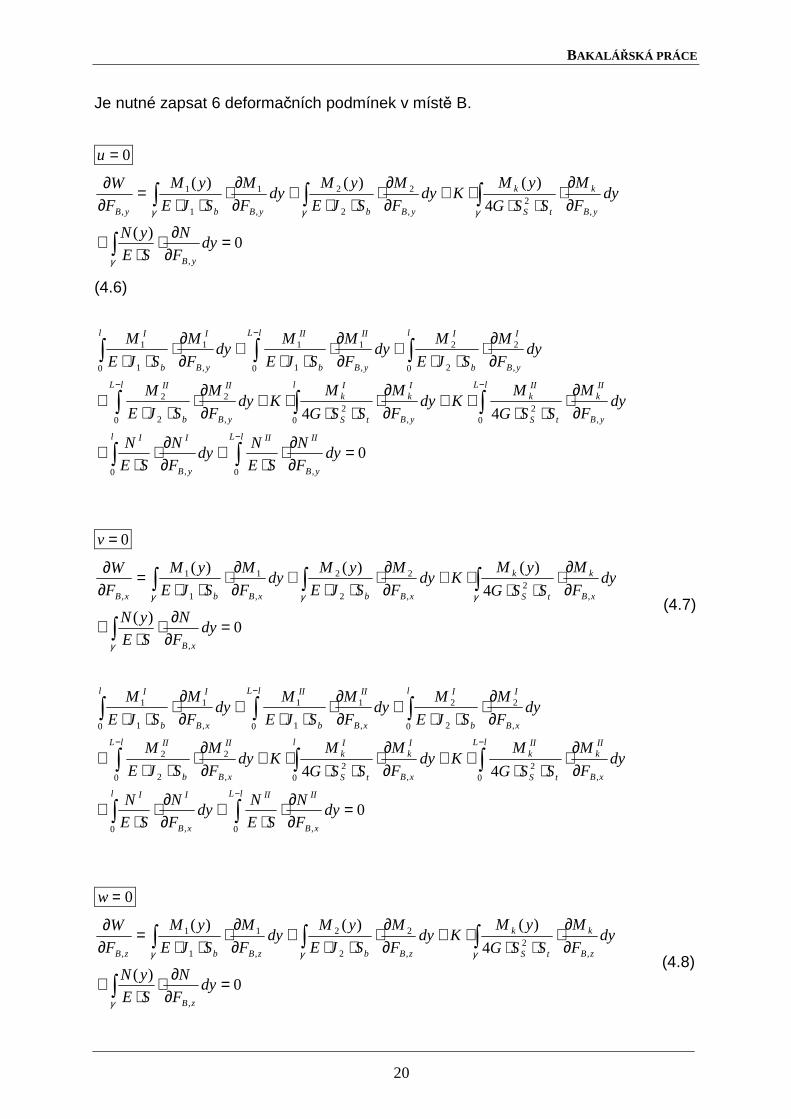
Je nutné zapsat 6 deformačních podmínek v místě B.
0=u
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyF
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
W
yB
yB
k
tS
k
yBbyBbyB
(4.6)
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
yB
IIIIl
yB
II
lL
yB
IIk
tS
IIk
l
yB
Ik
tS
Ik
lL
yB
II
b
II
l
yB
I
b
IlL
yB
II
b
IIl
yB
I
b
I
dyF
N
SE
Ndy
F
N
SE
N
dyF
M
SSG
MKdy
F
M
SSG
MKdy
F
M
SJE
M
dyF
M
SJE
Mdy
F
M
SJE
Mdy
F
M
SJE
M
0=v
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyF
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
W
xB
xB
k
tS
k
xBbxBbxB (4.7)
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
xB
IIIIl
xB
II
lL
xB
IIk
tS
IIk
l
xB
Ik
tS
Ik
lL
xB
II
b
II
l
xB
I
b
IlL
xB
II
b
IIl
xB
I
b
I
dyF
N
SE
Ndy
F
N
SE
N
dyF
M
SSG
MKdy
F
M
SSG
MKdy
F
M
SJE
M
dyF
M
SJE
Mdy
F
M
SJE
Mdy
F
M
SJE
M
0=w
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyF
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
W
zB
zB
k
tS
k
zBbzBbzB (4.8)
BAKALÁ ŘSKÁ PRÁCE
21
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
zB
IIIIl
zB
II
lL
zB
IIk
tS
IIk
l
zB
Ik
tS
Ik
lL
zB
II
b
II
l
zB
I
b
IlL
zB
II
b
IIl
zB
I
b
I
dyF
N
SE
Ndy
F
N
SE
N
dyF
M
SSG
MKdy
F
M
SSG
MKdy
F
M
SJE
M
dyF
M
SJE
Mdy
F
M
SJE
Mdy
F
M
SJE
M
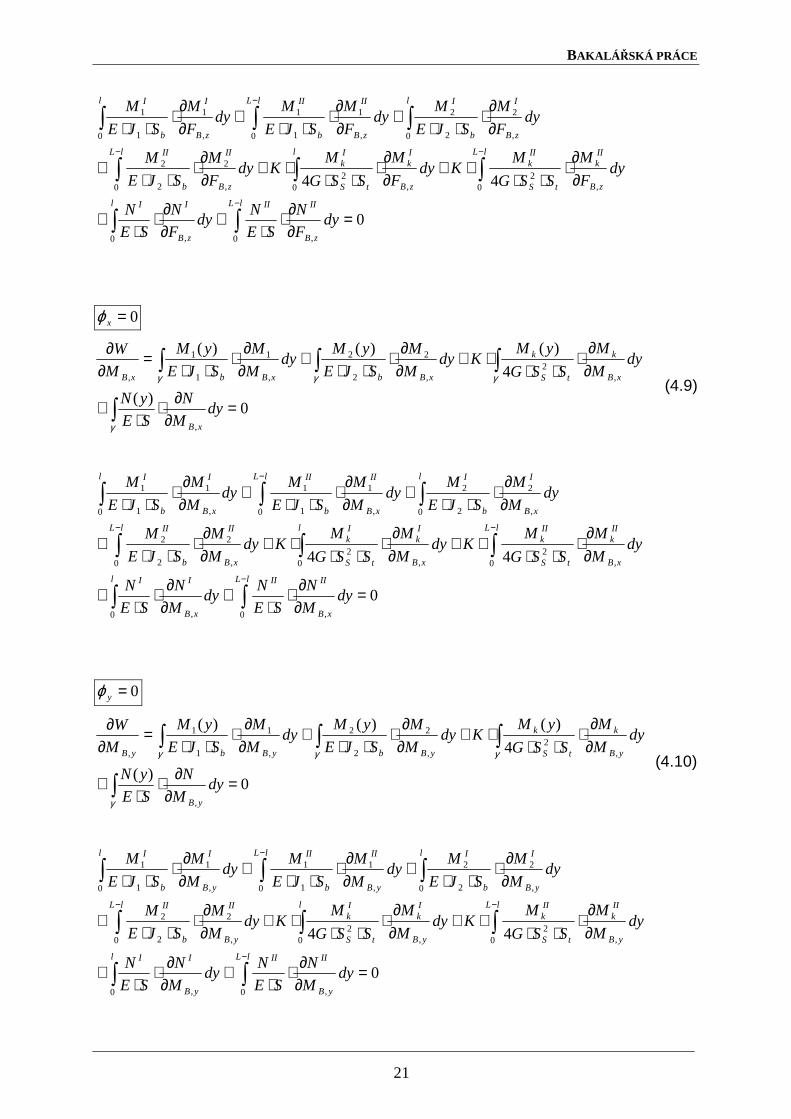
0=xϕ
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂
∂⋅⋅
+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyM
N
SE
yN
dyM
M
SSG
yMKdy
M
M
SJE
yMdy
M
M
SJE
yM
M
W
xB
xB
k
tS
k
xBbxBbxB (4.9)
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
xB
IIIIl
xB
II
lL
xB
IIk
tS
IIk
l
xB
Ik
tS
Ik
lL
xB
II
b
II
l
xB
I
b
IlL
xB
II
b
IIl
xB
I
b
I
dyM
N
SE
Ndy
M
N
SE
N
dyM
M
SSG
MKdy
M
M
SSG
MKdy
M
M
SJE
M
dyM
M
SJE
Mdy
M
M
SJE
Mdy
M
M
SJE
M
0=yϕ
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂
∂⋅⋅
+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyM
N
SE
yN
dyM
M
SSG
yMKdy
M
M
SJE
yMdy
M
M
SJE
yM
M
W
yB
yB
k
tS
k
yBbyBbyB (4.10)
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
yB
IIIIl
yB
II
lL
yB
IIk
tS
IIk
l
yB
Ik
tS
Ik
lL
yB
II
b
II
l
yB
I
b
IlL
yB
II
b
IIl
yB
I
b
I
dyM
N
SE
Ndy
M
N
SE
N
dyM
M
SSG
MKdy
M
M
SSG
MKdy
M
M
SJE
M
dyM
M
SJE
Mdy
M
M
SJE
Mdy
M
M
SJE
M
BAKALÁ ŘSKÁ PRÁCE
22
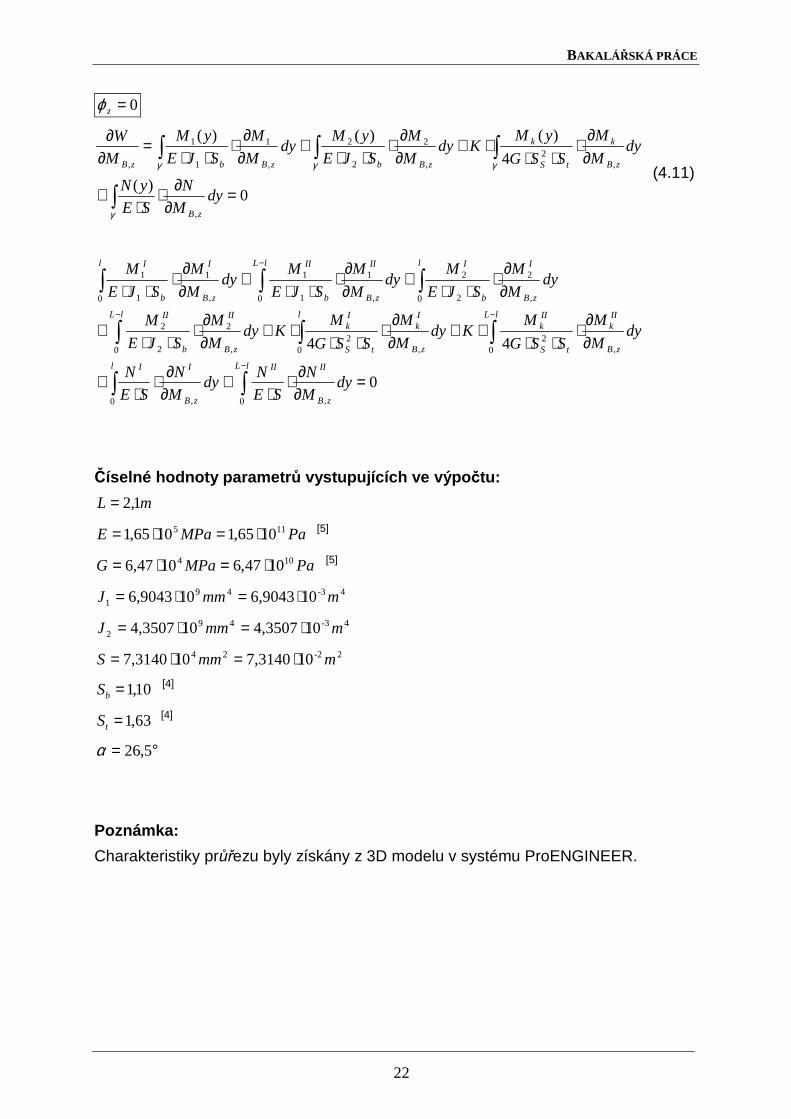
0=zϕ
0)(
4
)()()(
,
,2
,
2
2
2
,
1
1
1
,
=∂
∂⋅⋅
+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂
∫
∫ ∫ ∫
γ
γ γ γ
dyM
N
SE
yN
dyM
M
SSG
yMKdy
M
M
SJE
yMdy
M
M
SJE
yM
M
W
zB
zB
k
tS
k
zBbzBbzB (4.11)
0
44
0 ,0 ,
0 ,2
0 ,2
0 ,
2
2
2
0 ,
2
2
2
0 ,
1
1
1
0 ,
1
1
1
=∂∂⋅
⋅+
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+
∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
∫∫
∫∫∫
∫∫∫
−
−−
−
lL
zB
IIIIl
zB
II
lL
zB
IIk
tS
IIk
l
zB
Ik
tS
Ik
lL
zB
II
b
II
l
zB
I
b
IlL
zB
II
b
IIl
zB
I
b
I
dyM
N
SE
Ndy
M
N
SE
N
dyM
M
SSG
MKdy
M
M
SSG
MKdy
M
M
SJE
M
dyM
M
SJE
Mdy
M
M
SJE
Mdy
M
M
SJE
M
Číselné hodnoty parametr ů vystupujících ve výpo čtu:
mL 1,2=
PaMPaE 115 1065,11065,1 ⋅=⋅= [5]
PaMPaG 104 1047,61047,6 ⋅=⋅= [5]
4-3491 106,9043106,9043 mmmJ ⋅=⋅=
4-3492 104,3507104,3507 mmmJ ⋅=⋅=
2-224 107,3140107,3140 mmmS ⋅=⋅=
10,1=bS [4]
63,1=tS [4]
°= 5,26α
Poznámka:
Charakteristiky průřezu byly získány z 3D modelu v systému ProENGINEER.
BAKALÁ ŘSKÁ PRÁCE
23
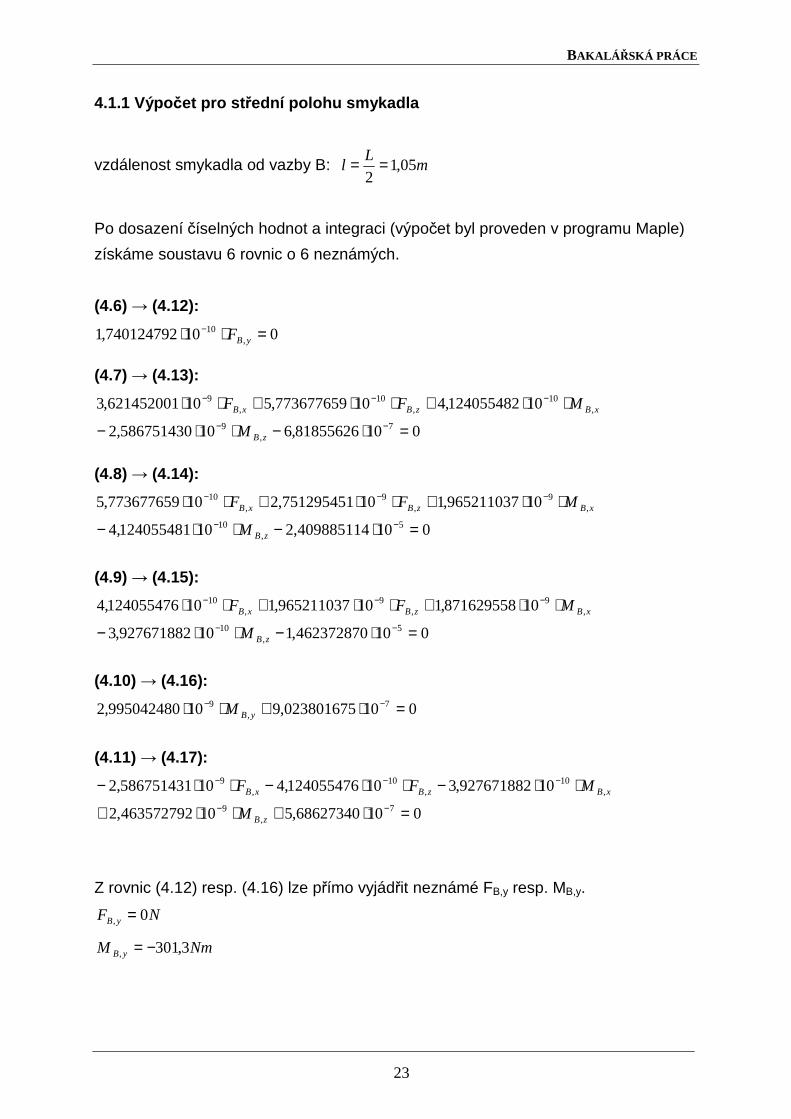
4.1.1 Výpočet pro st řední polohu smykadla
vzdálenost smykadla od vazby B: mL
l 05,12
==
Po dosazení číselných hodnot a integraci (výpočet byl proveden v programu Maple)
získáme soustavu 6 rovnic o 6 neznámých.
(4.6) → (4.12):
010740124792,1 ,10 =⋅⋅ −
yBF
(4.7) → (4.13):
01081855626,610586751430,2
10124055482,410773677659,510621452001,37
,9
,10
,10
,9
=⋅−⋅⋅−
⋅⋅+⋅⋅+⋅⋅−−
−−−
zB
xBzBxB
M
MFF
(4.8) → (4.14):
010409885114,210124055481,4
10965211037,110751295451,210773677659,55
,10
,9
,9
,10
=⋅−⋅⋅−
⋅⋅+⋅⋅+⋅⋅−−
−−−
zB
xBzBxB
M
MFF
(4.9) → (4.15):
010462372870,110927671882,3
10871629558,110965211037,110124055476,45
,10
,9
,9
,10
=⋅−⋅⋅−
⋅⋅+⋅⋅+⋅⋅−−
−−−
zB
xBzBxB
M
MFF
(4.10) → (4.16):
010023801675,910995042480,2 7,
9 =⋅+⋅⋅ −−yBM
(4.11) → (4.17):
01068627340,510463572792,2
10927671882,310124055476,410586751431,27
,9
,10
,10
,9
=⋅+⋅⋅+
⋅⋅−⋅⋅−⋅⋅−−−
−−−
zB
xBzBxB
M
MFF
Z rovnic (4.12) resp. (4.16) lze přímo vyjádřit neznámé FB,y resp. MB,y.
NF yB 0, =
NmM yB 3,301, −=
BAKALÁ ŘSKÁ PRÁCE
24
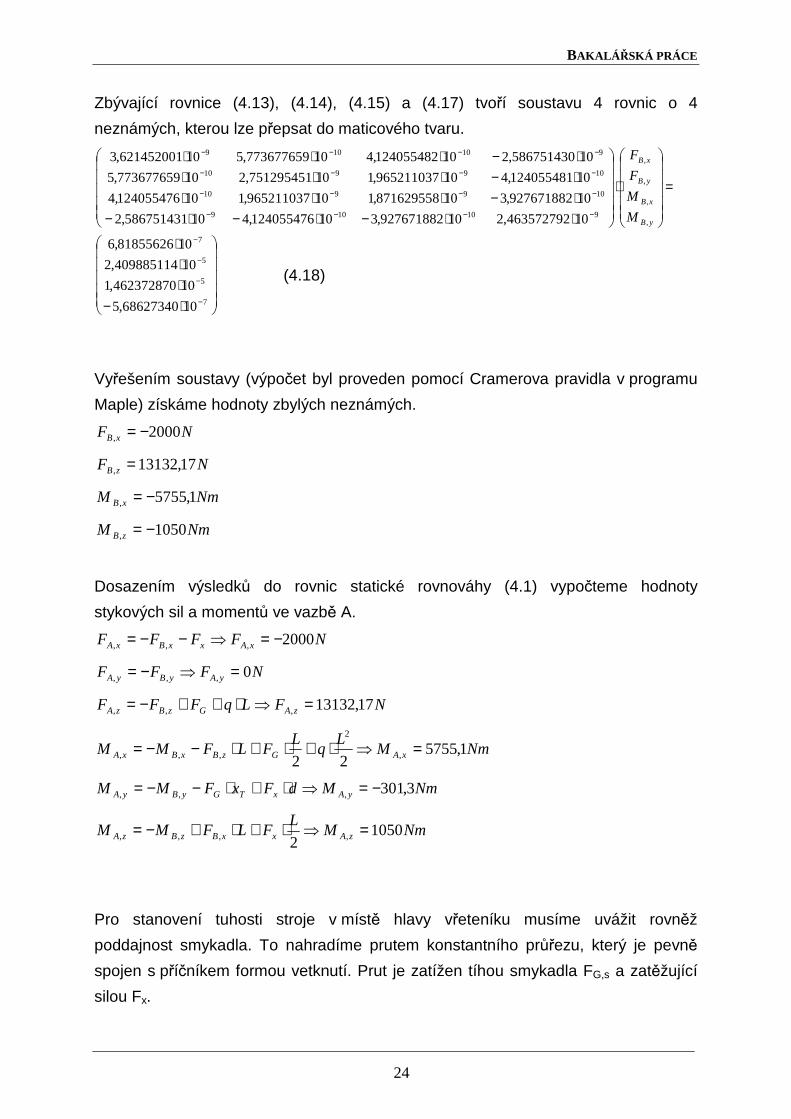
Zbývající rovnice (4.13), (4.14), (4.15) a (4.17) tvoří soustavu 4 rovnic o 4
neznámých, kterou lze přepsat do maticového tvaru.
⋅−⋅⋅
⋅
=
⋅
⋅⋅−⋅−⋅−⋅−⋅⋅⋅⋅−⋅⋅⋅⋅−⋅⋅⋅
−
−
−
−
−−−−
−−−−
−−−−
−−−−
7
5
5
7
,
,
,
,
910109
109910
109910
910109
1068627340,5
10462372870,1
10409885114,2
1081855626,6
10463572792,210927671882,310124055476,410586751431,2
10927671882,310871629558,110965211037,110124055476,4
10124055481,410965211037,110751295451,210773677659,5
10586751430,210124055482,410773677659,510621452001,3
yB
xB
yB
xB
M
M
F
F
Vyřešením soustavy (výpočet byl proveden pomocí Cramerova pravidla v programu
Maple) získáme hodnoty zbylých neznámých.
NF xB 2000, −=
NF zB 17,13132, =
NmM xB 1,5755, −=
NmM zB 1050, −=
Dosazením výsledků do rovnic statické rovnováhy (4.1) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFFF xAxxBxA 2000,,, −=⇒−−=
NFFF yAyByA 0,,, =⇒−=
NFLqFFF zAGzBzA 17,13132,,, =⇒⋅++−=
NmML
qL
FLFMM xAGzBxBxA 1,575522 ,
2
,,, =⇒⋅+⋅+⋅−−=
NmMdFxFMM yAxTGyByA 3,301,,, −=⇒⋅+⋅−−=
NmML
FLFMM zAxxBzBzA 10502 ,,,, =⇒⋅+⋅+−=
Pro stanovení tuhosti stroje v místě hlavy vřeteníku musíme uvážit rovněž
poddajnost smykadla. To nahradíme prutem konstantního průřezu, který je pevně
spojen s příčníkem formou vetknutí. Prut je zatížen tíhou smykadla FG,s a zatěžující
silou Fx.
(4.18)
BAKALÁ ŘSKÁ PRÁCE
25
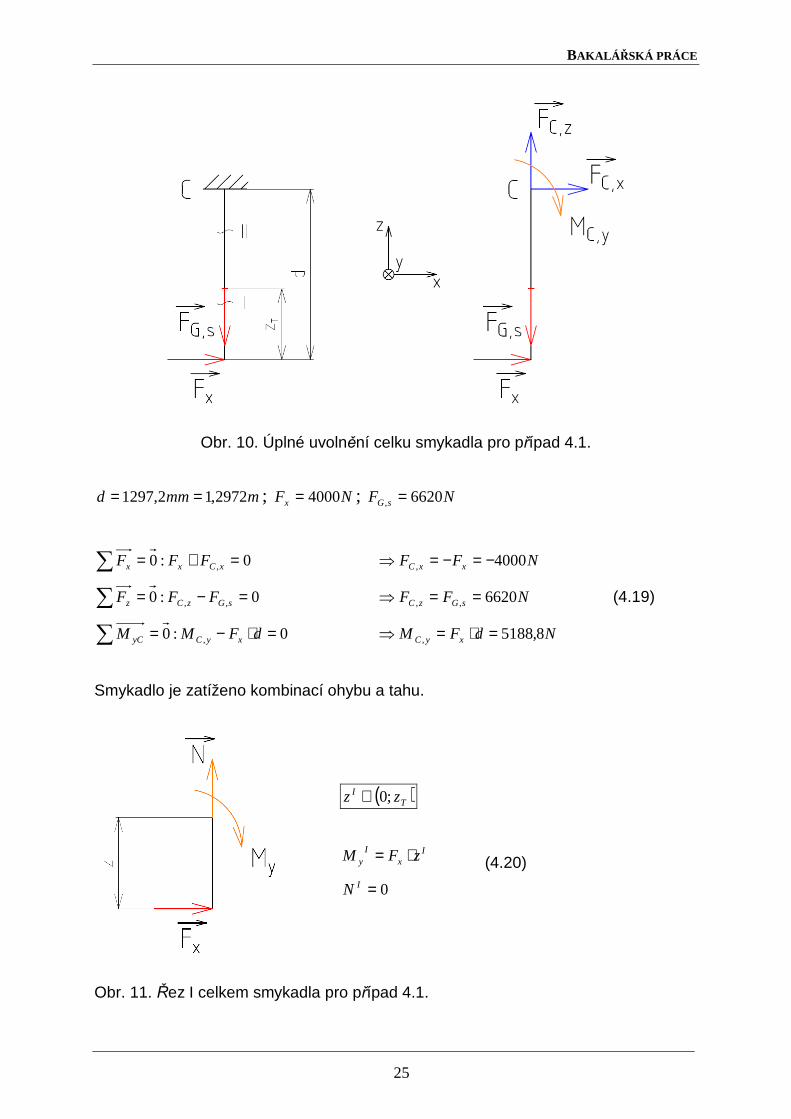
Obr. 10. Úplné uvolnění celku smykadla pro případ 4.1.
mmmd 2972,12,1297 == ; NFx 4000= ; NF sG 6620, =
0:0 , =+=∑ xCxx FFF NFF xxC 4000, −=−=⇒
0:0 ,, =−=∑ sGzCz FFF NFF sGzC 6620,, ==⇒ (4.19)
0:0 , =⋅−=∑ dFMM xyCyC NdFM xyC 8,5188, =⋅=⇒
Smykadlo je zatíženo kombinací ohybu a tahu.
( )TI zz ;0∈
Ix
Iy zFM ⋅=
0=IN
Obr. 11. Řez I celkem smykadla pro případ 4.1.
(4.20)

BAKALÁ ŘSKÁ PRÁCE
26
( )dzz TII ;∈
IIx
IIy zFM ⋅=
sGII FN ,=
Obr. 12. Řez II celkem smykadla pro případ 4.1.
Pro další výpočet je nutné určit plochu a kvadratický osový moment průřezu
smykadla.
Obr. 13. Průřez smykadla.
mmma 34,0340 == ; mmmD 275,0275 ==
[ ]( ) [ ]( )4
275,034,0
4
22
22 m
mD
aS⋅−=⋅−= ππ
221062,5 mS −⋅=
kruhyčtverecyy JJJ ,, −=
[ ]( ) [ ]( )64
275,0
12
34,0
6412
4444 mmDaJ y
⋅−=⋅−= ππ
(4.21)
(4.22)
(4.23)
BAKALÁ ŘSKÁ PRÁCE
27
441033,8 mJ y−⋅=
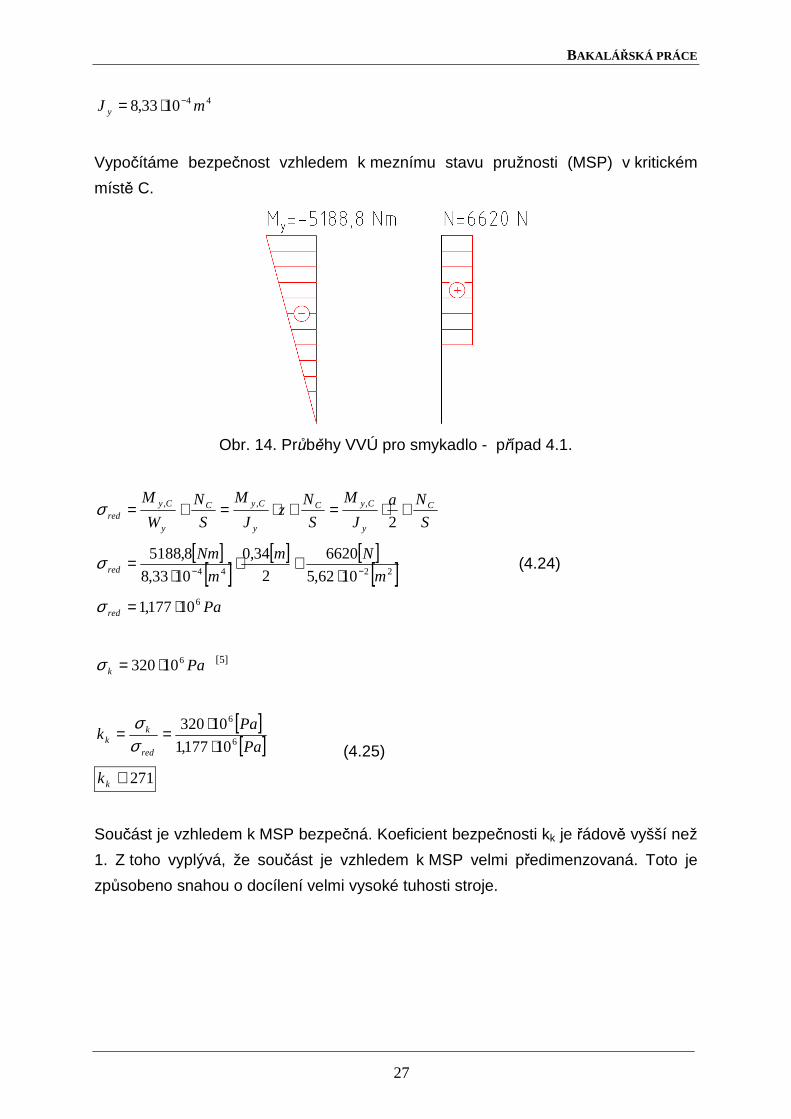
Vypočítáme bezpečnost vzhledem k meznímu stavu pružnosti (MSP) v kritickém
místě C.
Obr. 14. Průběhy VVÚ pro smykadlo - případ 4.1.
S
Na
J
M
S
Nz
J
M
S
N
W
MC
y
CyC
y
CyC
y
Cyred +⋅=+⋅=+=
2,,,σ
[ ][ ]
[ ] [ ][ ]2244 1062,5
6620
2
34,0
1033,8
8,5188
m
Nm
m
Nmred −− ⋅
+⋅⋅
=σ (4.24)
Pared610177,1 ⋅=σ
Pak610320 ⋅=σ [5]
[ ][ ]Pa
Pak
red
kk 6
6
10177,1
10320
⋅⋅==
σσ
271≅kk
Součást je vzhledem k MSP bezpečná. Koeficient bezpečnosti kk je řádově vyšší než
1. Z toho vyplývá, že součást je vzhledem k MSP velmi předimenzovaná. Toto je
způsobeno snahou o docílení velmi vysoké tuhosti stroje.
(4.25)

BAKALÁ ŘSKÁ PRÁCE
28
Příčná tuhost konstrukce v místě hlavy vřeteníku je rovna podílu zatěžující síly Fx a
průhybu v ve směru osy x v místě působení síly Fx. Průhyb v se určí parciální
derivací energie napjatosti podle zatěžující síly Fx. Do výpočtu je zahrnuta i ohybová
energie napjatosti smykadla, tahovou energii napjatosti smykadla považujeme za
zanedbatelnou.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
=∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wv
x
y
y
y
x
x
k
tS
k
xbxbx
)()(
4
)()()(2
2
2
21
1
1
(4.26)
Po dosazení číselných hodnot a integraci (výpočet byl proveden v programu Maple)
získáme číselnou hodnotu posuvu v.
zB
yBxBzB
xBx
M
MMF
FFv
,10
,9
,10
,10
,995
10466878575,6
10942584552,110031013871,110804274274,1
10131703751,110267230073,810320450610,1
⋅⋅−
⋅⋅−⋅⋅+⋅⋅+
⋅⋅+⋅⋅+⋅−=
−
−−−
−−−
mv 51006,2 −⋅=
[ ][ ]m
N
v
Fk x
x 51006,2
4000−⋅
==
181094,1 −⋅= Nmk x
(4.28)
(4.27)
BAKALÁ ŘSKÁ PRÁCE
29
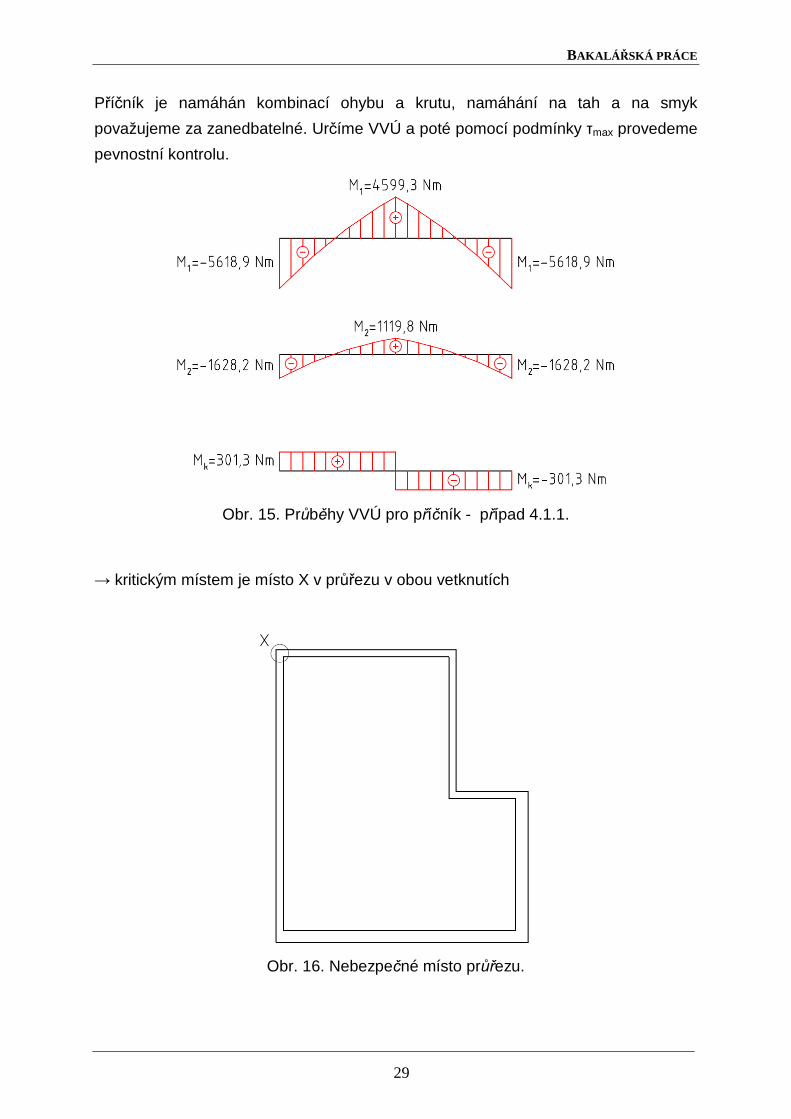
Příčník je namáhán kombinací ohybu a krutu, namáhání na tah a na smyk
považujeme za zanedbatelné. Určíme VVÚ a poté pomocí podmínky τmax provedeme
pevnostní kontrolu.
Obr. 15. Průběhy VVÚ pro příčník - případ 4.1.1.
→ kritickým místem je místo X v průřezu v obou vetknutích
Obr. 16. Nebezpečné místo průřezu.

BAKALÁ ŘSKÁ PRÁCE
30
22
21
1
1 rJ
Mr
J
M⋅+⋅−=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310382,409325,0
103507,4
2,162858135,0
109043,6
9,5618 ⋅−=⋅⋅
+⋅⋅
−= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 42
10656,102,0454901,02
3,301 ⋅=⋅⋅
=τ
[ ]( ) [ ]( ) PaPaPared5242522 10395,410656,1410382,44 ⋅=⋅⋅+⋅−=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 5
6
10395,4
10320
⋅⋅==
σσ
728≅kk
Příčník je, stejně jako smykadlo, vzhledem k MSP bezpečný. Koeficient bezpečnosti
kk je opět řádově vyšší než 1.
4.1.2 Výpočet pro krajní polohu smykadla
vzdálenost smykadla od vazby B: ml 55,0=
Vyřešením soustavy rovnic (4.6) až (4.11) získáme hodnoty neznámých v místě B.
NF xB 6,3320, −=
NF yB 0, =
NF zB 5,17504, =
NmM xB 8,6246, −=
NmM yB 8,444, −=
NmM zB 5,1198, −=
(4.29)
(4.30)
(4.31)
(4.32)

BAKALÁ ŘSKÁ PRÁCE
31
Dosazením výsledků do rovnic statické rovnováhy (4.1) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFFF xAxxBxA 4,679,,, −=⇒−−=
NFFF yAyByA 0,,, =⇒−=
NFLqFFF zAGzBzA 9,8759,,, =⇒⋅++−=
( ) NmML
qlLFLFMM xAGzBxBxA 7,36862 ,
2
,,, =⇒⋅+−⋅+⋅−−=
NmMdFxFMM yAxTGyByA 8,157,,, −=⇒⋅+⋅−−=
( ) NmMlLFLFMM zAxxBzBzA 3,425,,,, =⇒−⋅+⋅+−=
Vypočteme příčnou tuhost konstrukce v místě hlavy vřeteníku. Do výpočtu zahrneme
poddajnost smykadla.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂
⋅⋅⋅
+∂∂
⋅⋅⋅
=∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wv
x
y
y
y
x
x
k
tS
k
xbxbx
)()(
4
)()()(2
2
2
21
1
1
mv 51008,2 −⋅=
[ ][ ]m
N
v
Fk x
x 51008,2
4000−⋅
==
181093,1 −⋅= Nmk x
(4.33)
(4.34)
BAKALÁ ŘSKÁ PRÁCE
32
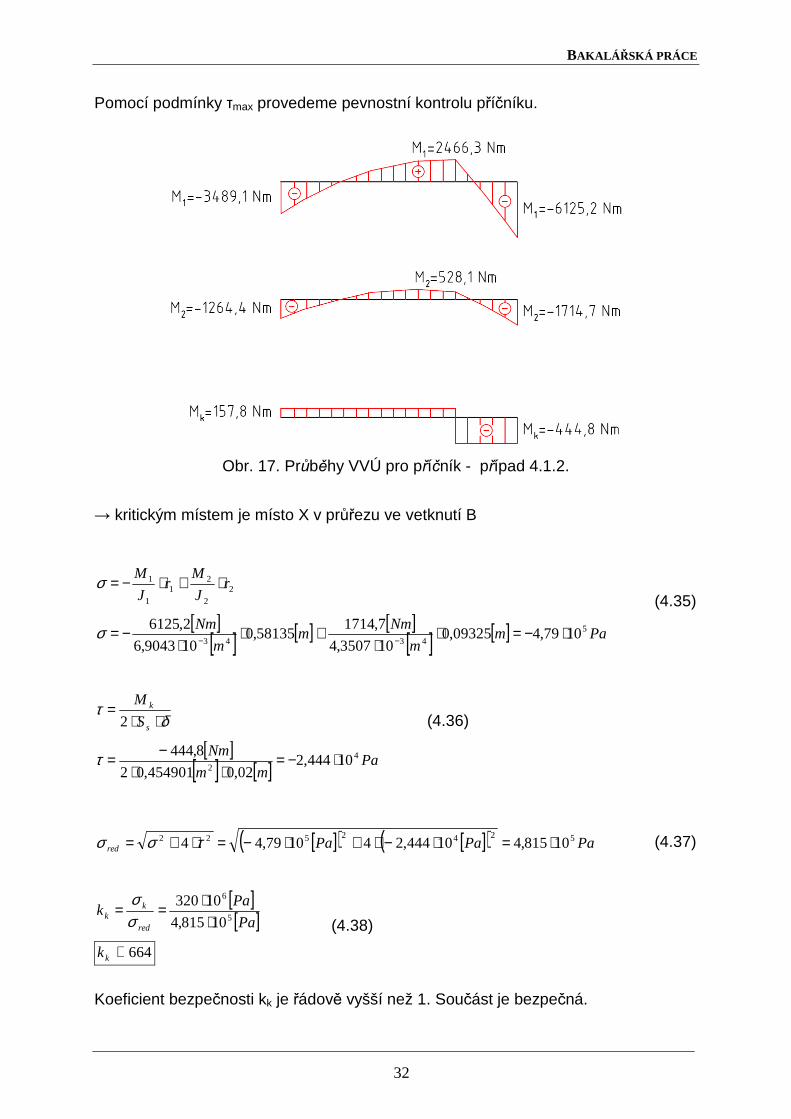
Pomocí podmínky τmax provedeme pevnostní kontrolu příčníku.
Obr. 17. Průběhy VVÚ pro příčník - případ 4.1.2.
→ kritickým místem je místo X v průřezu ve vetknutí B
22
21
1
1 rJ
Mr
J
M⋅+⋅−=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
43431079,409325,0
103507,4
7,171458135,0
109043,6
2,6125 ⋅−=⋅⋅
+⋅⋅
−= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 42
10444,202,0454901,02
8,444 ⋅−=⋅⋅
−=τ
[ ]( ) [ ]( ) PaPaPared5242522 10815,410444,241079,44 ⋅=⋅−⋅+⋅−=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 5
6
10815,4
10320
⋅⋅==
σσ
664≅kk
Koeficient bezpečnosti kk je řádově vyšší než 1. Součást je bezpečná.
(4.35)
(4.36)
(4.37)
(4.38)
BAKALÁ ŘSKÁ PRÁCE
33
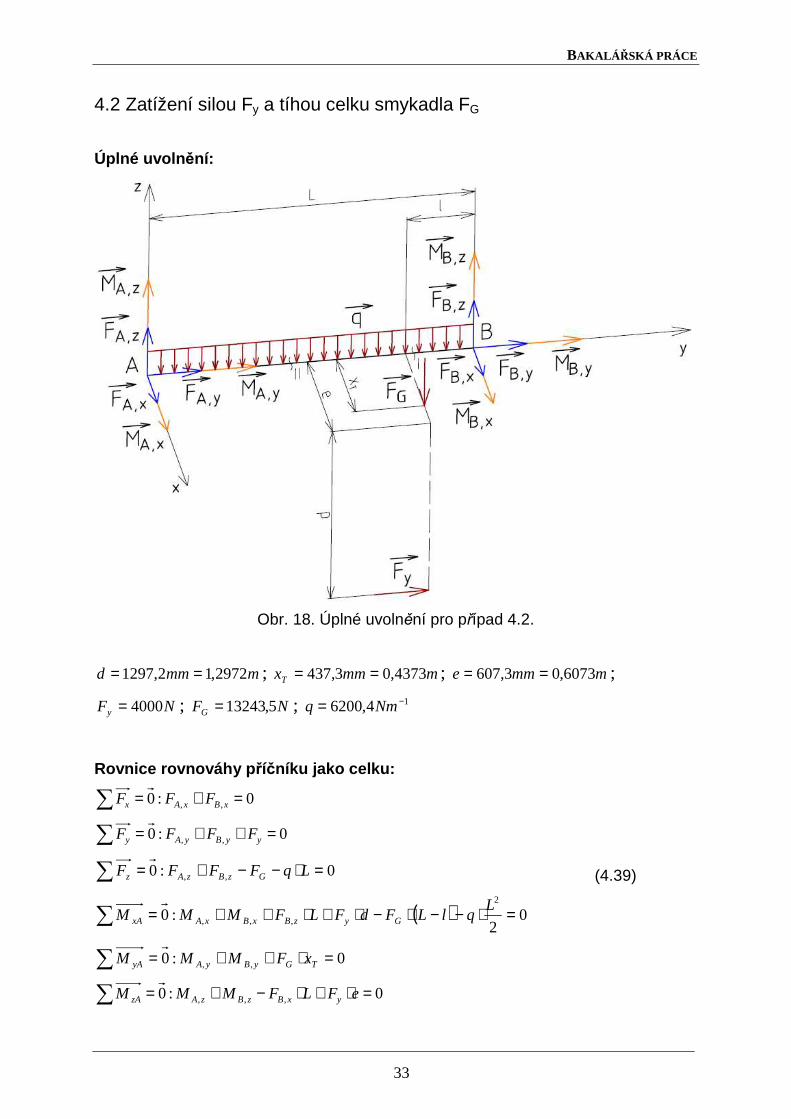
4.2 Zatížení silou Fy a tíhou celku smykadla FG
Úplné uvoln ění:
Obr. 18. Úplné uvolnění pro případ 4.2.
mmmd 2972,12,1297 == ; mmmxT 4373,03,437 == ; mmme 6073,03,607 == ;
NFy 4000= ; NFG 5,13243= ; 14,6200 −= Nmq
Rovnice rovnováhy p říčníku jako celku:
0:0 ,, =+=∑ xBxAx FFF
0:0 ,, =++=∑ yyByAy FFFF
0:0 ,, =⋅−−+=∑ LqFFFF GzBzAz
( ) 02
:02
,,, =⋅−−⋅−⋅+⋅++=∑L
qlLFdFLFMMM GyzBxBxAxA
0:0 ,, =⋅++=∑ TGyByAyA xFMMM
0:0 ,,, =⋅+⋅−+=∑ eFLFMMM yxBzBzAzA
(4.39)
BAKALÁ ŘSKÁ PRÁCE
34
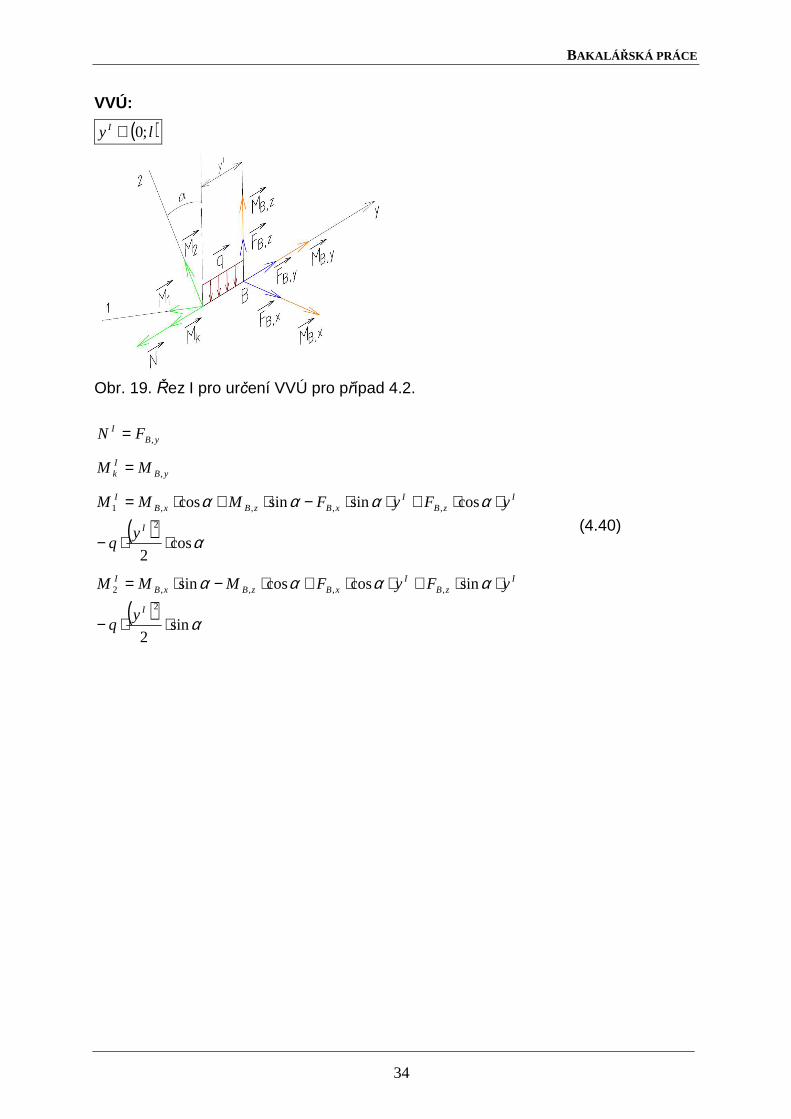
VVÚ:
( )ly I ;0∈
Obr. 19. Řez I pro určení VVÚ pro případ 4.2.
yBI FN ,=
yBIk MM ,=
( ) α
αααα
cos2
cossinsincos2
,,,,1
⋅⋅−
⋅⋅+⋅⋅−⋅+⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
(4.40)
( ) α
αααα
sin2
sincoscossin2
,,,,2
⋅⋅−
⋅⋅+⋅⋅+⋅−⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
BAKALÁ ŘSKÁ PRÁCE
35
( )lLy II −∈ ;0
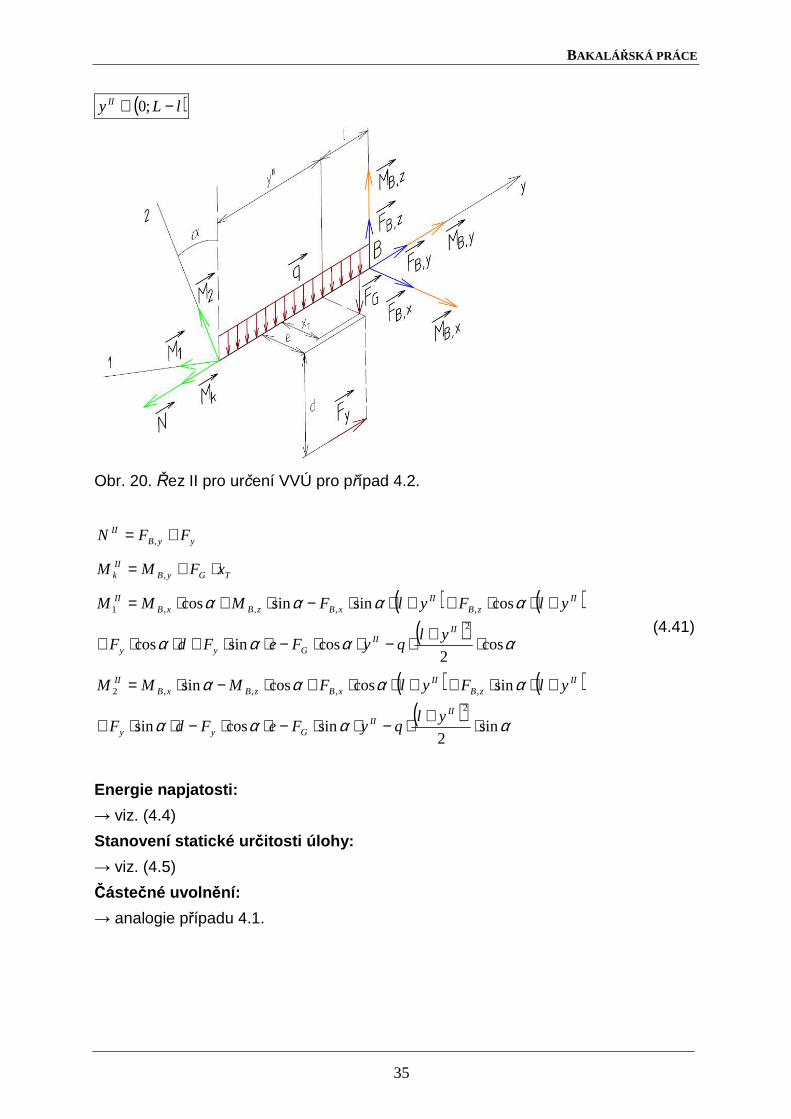
Obr. 20. Řez II pro určení VVÚ pro případ 4.2.
yyBII FFN += ,
TGyBIIk xFMM ⋅+= ,
( ) ( )( ) αααα
αααα
cos2
cossincos
cossinsincos2
,,,,1
⋅+⋅−⋅⋅−⋅⋅+⋅⋅+
+⋅⋅++⋅⋅−⋅+⋅=II
IIGyy
IIzB
IIxBzBxB
II
ylqyFeFdF
ylFylFMMM
(4.41)
( ) ( )( ) αααα
αααα
sin2
sincossin
sincoscossin2
,,,,2
⋅+⋅−⋅⋅−⋅⋅−⋅⋅+
+⋅⋅++⋅⋅+⋅−⋅=II
IIGyy
IIzB
IIxBzBxB
II
ylqyFeFdF
ylFylFMMM
Energie napjatosti:
→ viz. (4.4)
Stanovení statické ur čitosti úlohy:
→ viz. (4.5)
Částečné uvoln ění:
→ analogie případu 4.1.

BAKALÁ ŘSKÁ PRÁCE
36
4.2.1 Výpočet pro st řední polohu smykadla
Vyřešením soustavy rovnic (4.6) až (4.11) získáme hodnoty neznámých v místě B.
NF xB 1,1735, =
NF yB 2000, −=
NF zB 9,9425, =
NmM xB 9,4457, −=
NmM yB 7,2895, −=
NmM zB 3,607, =
Dosazením výsledků do rovnic statické rovnováhy (4.39) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 1,1735,,, −=⇒−=
NFFFF yAyyByA 2000,,, −=⇒−−=
NFLqFFF zAGzBzA 5,16838,,, =⇒⋅++−=
NmML
qL
FdFLFMM xAGyzBxBxA 3,705222 ,
2
,,, =⇒⋅+⋅+⋅−⋅−−=
NmMxFMM yATGyByA 7,2895,,, −=⇒⋅−−=
NmMeFLFMM zAyxBzBzA 3,607,,,, =⇒⋅−⋅+−=
BAKALÁ ŘSKÁ PRÁCE
37
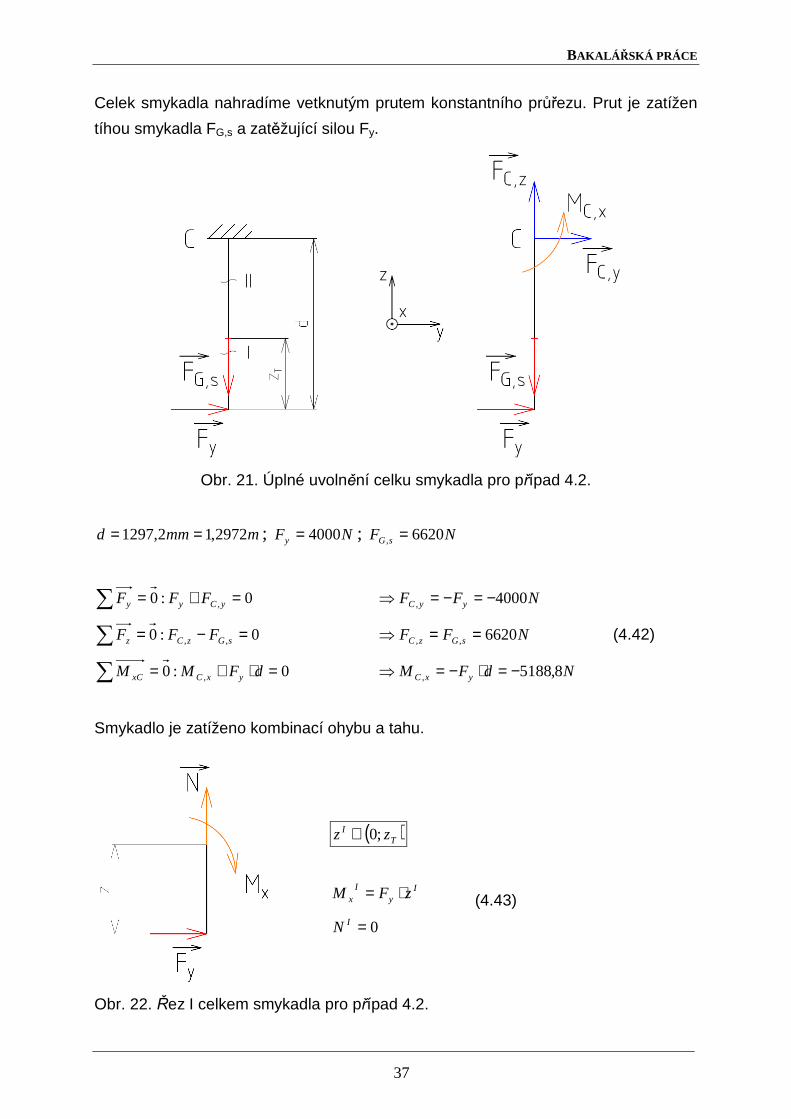
Celek smykadla nahradíme vetknutým prutem konstantního průřezu. Prut je zatížen
tíhou smykadla FG,s a zatěžující silou Fy.
Obr. 21. Úplné uvolnění celku smykadla pro případ 4.2.
mmmd 2972,12,1297 == ; NFy 4000= ; NF sG 6620, =
0:0 , =+=∑ yCyy FFF NFF yyC 4000, −=−=⇒
0:0 ,, =−=∑ sGzCz FFF NFF sGzC 6620,, ==⇒ (4.42)
0:0 , =⋅+=∑ dFMM yxCxC NdFM yxC 8,5188, −=⋅−=⇒
Smykadlo je zatíženo kombinací ohybu a tahu.
( )TI zz ;0∈
Iy
Ix zFM ⋅=
0=IN
Obr. 22. Řez I celkem smykadla pro případ 4.2.
(4.43)
BAKALÁ ŘSKÁ PRÁCE
38
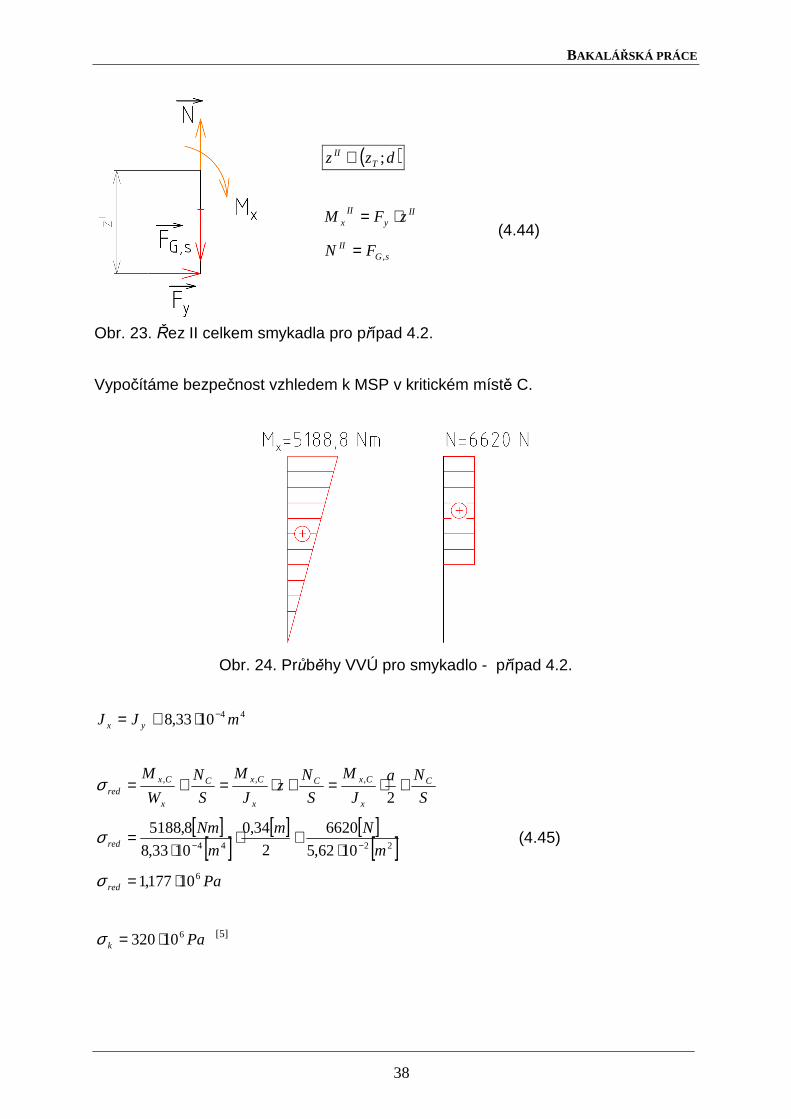
( )dzz TII ;∈
IIy
IIx zFM ⋅=
sGII FN ,=
Obr. 23. Řez II celkem smykadla pro případ 4.2.
Vypočítáme bezpečnost vzhledem k MSP v kritickém místě C.
Obr. 24. Průběhy VVÚ pro smykadlo - případ 4.2.
441033,8 mJJ yx
−⋅≅=
S
Na
J
M
S
Nz
J
M
S
N
W
MC
x
CxC
x
CxC
x
Cxred +⋅=+⋅=+=
2,,,σ
[ ][ ]
[ ] [ ][ ]2244 1062,5
6620
2
34,0
1033,8
8,5188
m
Nm
m
Nmred −− ⋅
+⋅⋅
=σ (4.45)
Pared610177,1 ⋅=σ
Pak610320 ⋅=σ [5]
(4.44)

BAKALÁ ŘSKÁ PRÁCE
39
[ ][ ]Pa
Pak
red
kk 6
6
10177,1
10320
⋅⋅==
σσ
271≅kk
Součást je vzhledem k MSP bezpečná. Koeficient bezpečnosti kk je řádově vyšší než
1.
Podélná tuhost konstrukce v místě hlavy vřeteníku je rovna podílu zatěžující síly Fy a
posuvu u ve směru osy y v místě působení síly Fy. Posuv u se určí parciální derivací
energie napjatosti podle zatěžující síly Fy.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wu
y
x
x
x
y
y
k
tS
k
ybyby
)()(
4
)()()(2
2
2
21
1
1
(4.47)
mu 51022,2 −⋅=
[ ][ ]m
N
u
Fk y
y 51022,2
4000−⋅
==
181080,1 −⋅= Nmk y
(4.46)
(4.48)
BAKALÁ ŘSKÁ PRÁCE
40
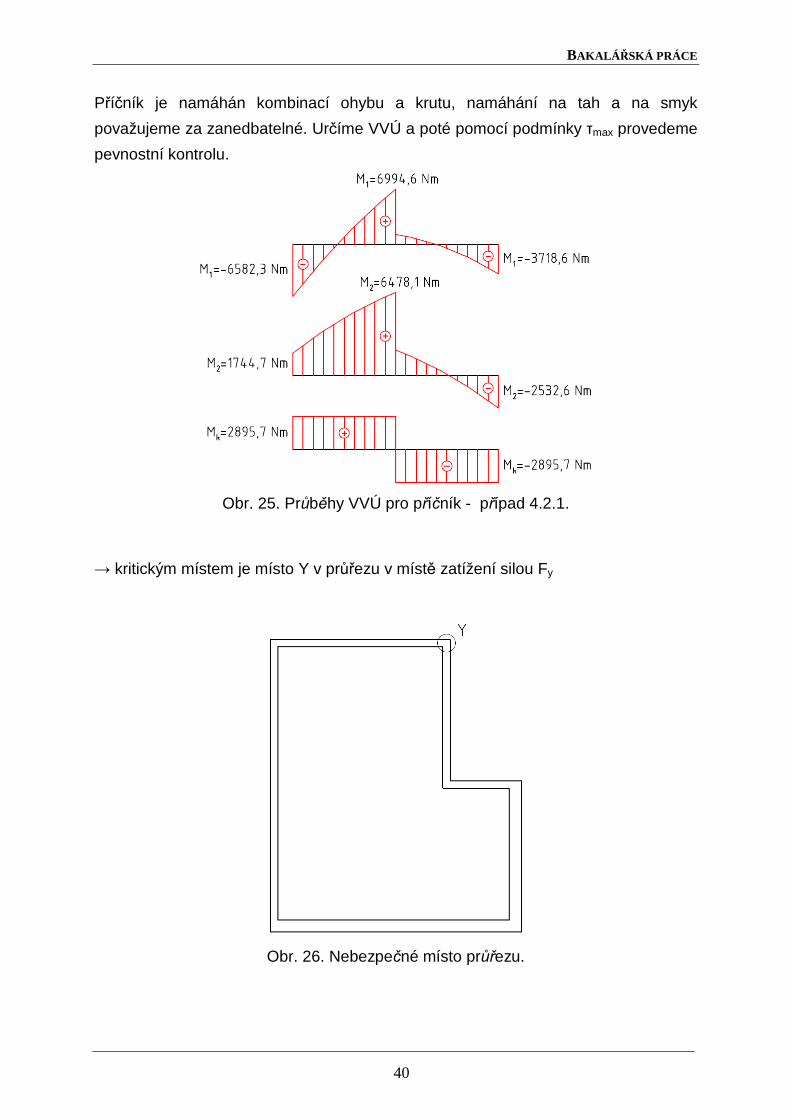
Příčník je namáhán kombinací ohybu a krutu, namáhání na tah a na smyk
považujeme za zanedbatelné. Určíme VVÚ a poté pomocí podmínky τmax provedeme
pevnostní kontrolu.
Obr. 25. Průběhy VVÚ pro příčník - případ 4.2.1.
→ kritickým místem je místo Y v průřezu v místě zatížení silou Fy
Obr. 26. Nebezpečné místo průřezu.

BAKALÁ ŘSKÁ PRÁCE
41
22
21
1
1 rJ
Mr
J
M⋅+⋅=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310731,83364,0
103507,4
1,64783674,0
109043,6
6,6994 ⋅=⋅⋅
+⋅⋅
= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10591,102,0454901,02
7,2895 ⋅=⋅⋅
=τ
[ ]( ) [ ]( ) PaPaPared5252522 10293,910591,1410731,84 ⋅=⋅⋅+⋅=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 5
6
10293,9
10320
⋅⋅==
σσ
344≅kk
Příčník je, stejně jako smykadlo, vzhledem k MSP bezpečný. Koeficient bezpečnosti
kk je opět řádově vyšší než 1.
4.2.2 Výpočet pro krajní polohu smykadla
Vyřešením soustavy rovnic (4.6) až (4.11) získáme hodnoty neznámých v místě B.
NF xB 3,1359, =
NF yB 4,2952, −=
NF zB 9,14634, =
NmM xB 6,7063, −=
NmM yB 6,4274, −=
NmM zB 7,365, −=
(4.49)
(4.50)
(4.51)
(4.52)

BAKALÁ ŘSKÁ PRÁCE
42
Dosazením výsledků do rovnic statické rovnováhy (4.39) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 3,1359,,, −=⇒−=
NFFFF yAyyByA 6,1047,,, −=⇒−−=
NFLqFFF zAGzBzA 4,11629,,, =⇒⋅++−=
( ) NmML
qlLFdFLFMM xAGyzBxBxA 8,53402 ,
2
,,, =⇒⋅+−⋅+⋅−⋅−−=
NmMxFMM yATGyByA 4,1516,,, −=⇒⋅−−=
NmMeFLFMM zAyxBzBzA 1,791,,,, =⇒⋅−⋅+−=
Vypočteme podélnou tuhost konstrukce v místě hlavy vřeteníku. Do výpočtu
zahrneme poddajnost smykadla.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wu
y
x
x
x
y
y
k
tS
k
ybyby
)()(
4
)()()(2
2
2
21
1
1
(4.53)
mu 51030,2 −⋅≅
[ ][ ]m
N
u
Fk y
y 51030,2
4000−⋅
==
181074,1 −⋅≅ Nmk y
(4.54)
BAKALÁ ŘSKÁ PRÁCE
43
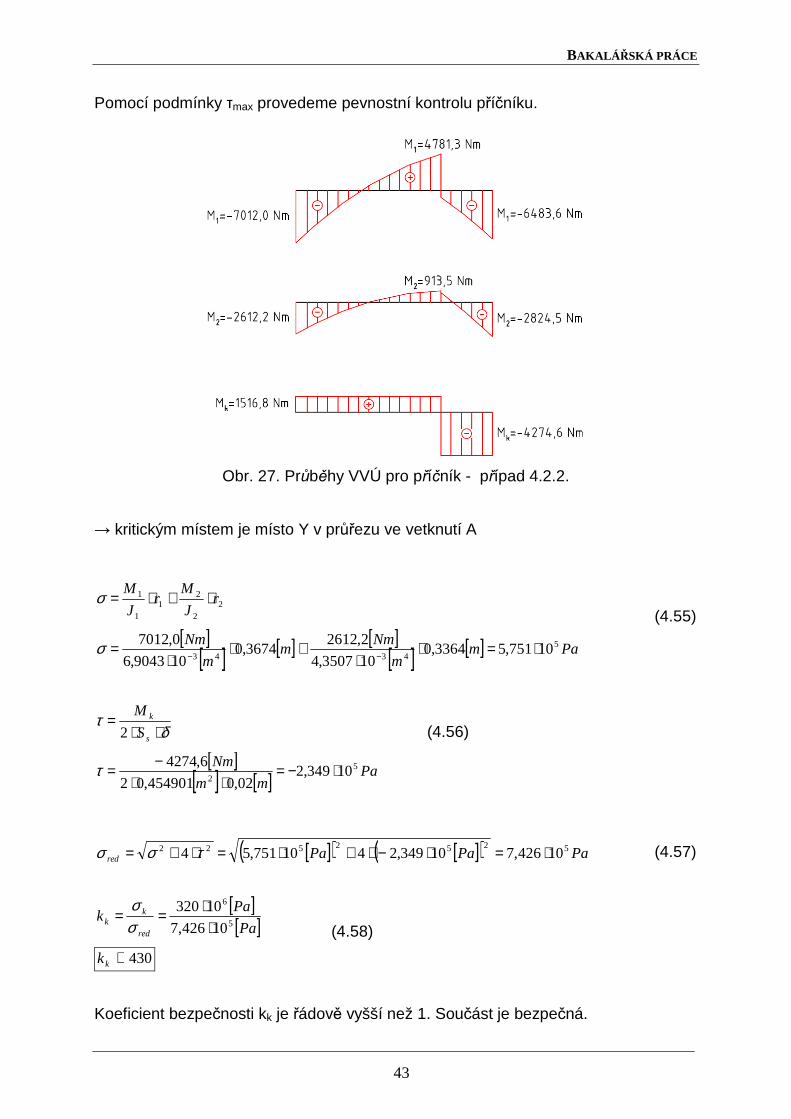
Pomocí podmínky τmax provedeme pevnostní kontrolu příčníku.
Obr. 27. Průběhy VVÚ pro příčník - případ 4.2.2.
→ kritickým místem je místo Y v průřezu ve vetknutí A
22
21
1
1 rJ
Mr
J
M⋅+⋅=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310751,53364,0
103507,4
2,26123674,0
109043,6
0,7012 ⋅=⋅⋅
+⋅⋅
= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10349,202,0454901,02
6,4274 ⋅−=⋅⋅
−=τ
[ ]( ) [ ]( ) PaPaPared5252522 10426,710349,2410751,54 ⋅=⋅−⋅+⋅=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 5
6
10426,7
10320
⋅⋅==
σσ
430≅kk
Koeficient bezpečnosti kk je řádově vyšší než 1. Součást je bezpečná.
(4.55)
(4.56)
(4.57)
(4.58)
BAKALÁ ŘSKÁ PRÁCE
44
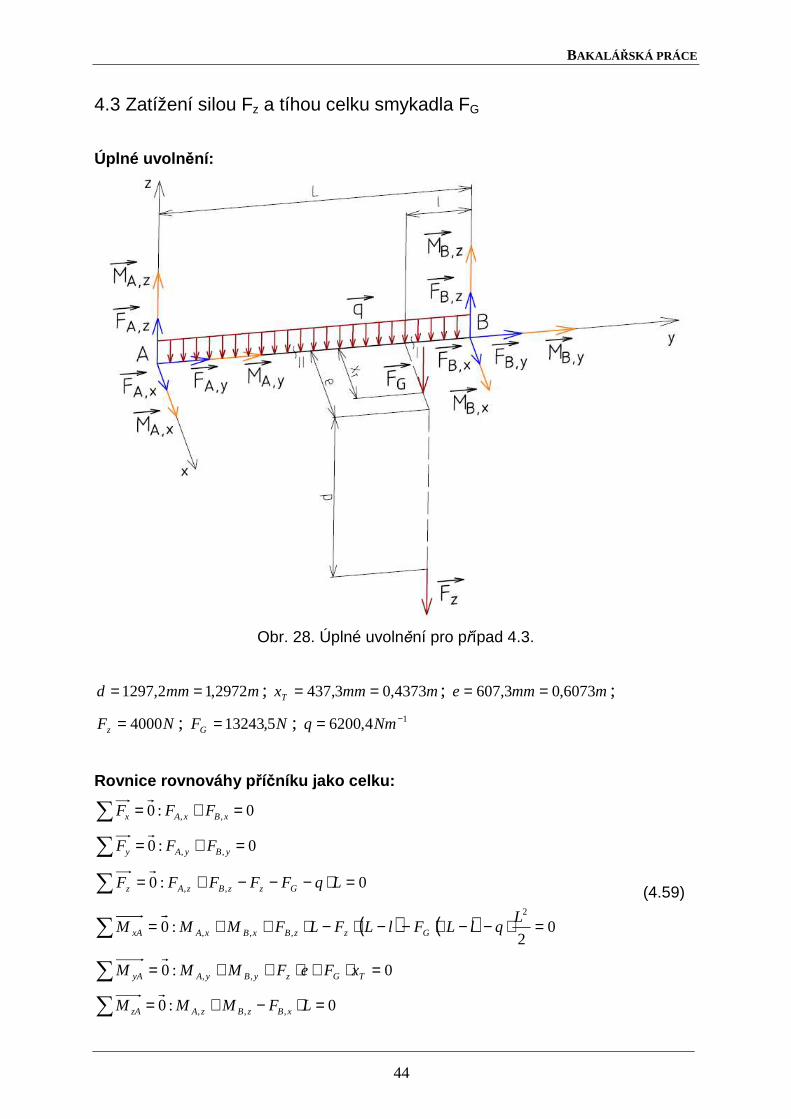
4.3 Zatížení silou Fz a tíhou celku smykadla FG
Úplné uvoln ění:
Obr. 28. Úplné uvolnění pro případ 4.3.
mmmd 2972,12,1297 == ; mmmxT 4373,03,437 == ; mmme 6073,03,607 == ;
NFz 4000= ; NFG 5,13243= ; 14,6200 −= Nmq
Rovnice rovnováhy p říčníku jako celku:
0:0 ,, =+=∑ xBxAx FFF
0:0 ,, =+=∑ yByAy FFF
0:0 ,, =⋅−−−+=∑ LqFFFFF GzzBzAz
( ) ( ) 02
:02
,,, =⋅−−⋅−−⋅−⋅++=∑L
qlLFlLFLFMMM GzzBxBxAxA
0:0 ,, =⋅+⋅++=∑ TGzyByAyA xFeFMMM
0:0 ,,, =⋅−+=∑ LFMMM xBzBzAzA
(4.59)
BAKALÁ ŘSKÁ PRÁCE
45
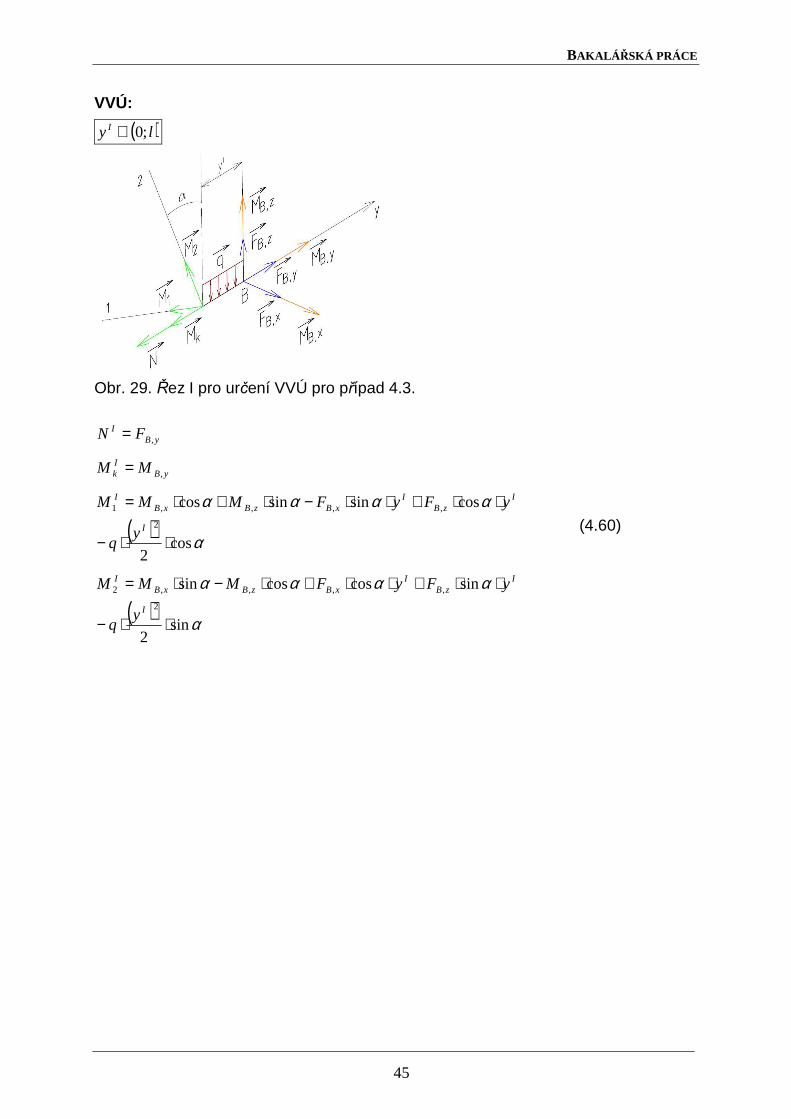
VVÚ:
( )ly I ;0∈
Obr. 29. Řez I pro určení VVÚ pro případ 4.3.
yBI FN ,=
yBIk MM ,=
( ) α
αααα
cos2
cossinsincos2
,,,,1
⋅⋅−
⋅⋅+⋅⋅−⋅+⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
(4.60)
( ) α
αααα
sin2
sincoscossin2
,,,,2
⋅⋅−
⋅⋅+⋅⋅+⋅−⋅=I
IzB
IxBzBxB
I
yq
yFyFMMM
BAKALÁ ŘSKÁ PRÁCE
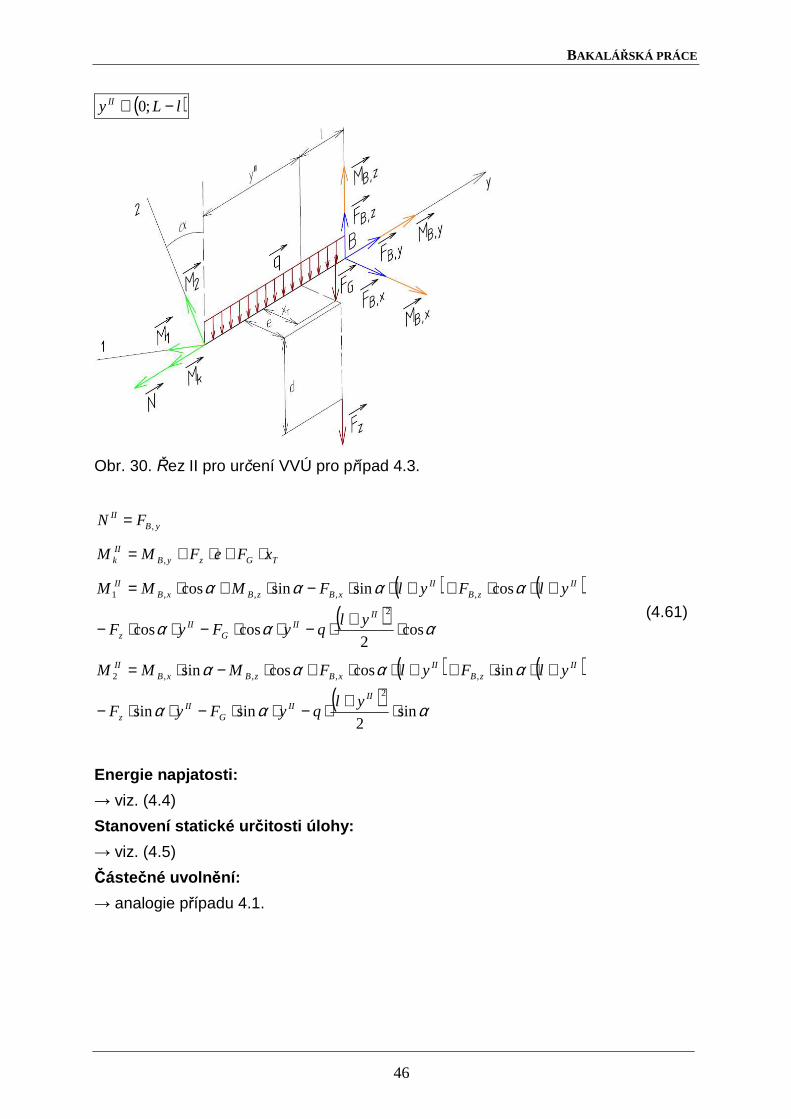
46
( )lLy II −∈ ;0
Obr. 30. Řez II pro určení VVÚ pro případ 4.3.
yBII FN ,=
TGzyBIIk xFeFMM ⋅+⋅+= ,
( ) ( )( ) ααα
αααα
cos2
coscos
cossinsincos2
,,,,1
⋅+⋅−⋅⋅−⋅⋅−
+⋅⋅++⋅⋅−⋅+⋅=II
IIG
IIz
IIzB
IIxBzBxB
II
ylqyFyF
ylFylFMMM
(4.61)
( ) ( )( ) ααα
αααα
sin2
sinsin
sincoscossin2
,,,,2
⋅+⋅−⋅⋅−⋅⋅−
+⋅⋅++⋅⋅+⋅−⋅=II
IIG
IIz
IIzB
IIxBzBxB
II
ylqyFyF
ylFylFMMM
Energie napjatosti:
→ viz. (4.4)
Stanovení statické ur čitosti úlohy:
→ viz. (4.5)
Částečné uvoln ění:
→ analogie případu 4.1.

BAKALÁ ŘSKÁ PRÁCE
47
4.3.1 Výpočet pro st řední polohu smykadla
Vyřešením soustavy rovnic (4.6) až (4.11) získáme hodnoty neznámých v místě B.
NF xB 0, =
NF yB 0, =
NF zB 17,15132, =
NmM xB 1,6805, −=
NmM yB 3,4110, −=
NmM zB 0, =
Dosazením výsledků do rovnic statické rovnováhy (4.59) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 0,,, =⇒−=
NFFF yAyByA 0,,, =⇒−=
NFLqFFFF zAGzzBzA 17,15132,,, =⇒⋅+++−=
NmML
qL
FL
FLFMM xAGzzBxBxA 1,6805222 ,
2
,,, =⇒⋅+⋅+⋅+⋅−−=
NmMxFeFMM yATGzyByA 3,4110,,, −=⇒⋅−⋅−−=
NmMLFMM zAxBzBzA 0,,,, =⇒⋅+−=
Svislá tuhost konstrukce v místě hlavy vřeteníku je rovna podílu zatěžující síly Fz a
průhybu w ve směru osy z v místě působení síly Fz. Průhyb w se určí parciální
derivací energie napjatosti podle zatěžující síly Fz.
∫
∫ ∫ ∫
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γ
γ γ γ
dyF
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Ww
z
z
k
tS
k
zbzbz
)(
4
)()()(2
2
2
21
1
1
(4.62)
mw 61076,4 −⋅=
[ ][ ]m
N
w
Fk z
z 61076,4
4000−⋅
==
181040,8 −⋅= Nmk z
(4.63)
BAKALÁ ŘSKÁ PRÁCE
48
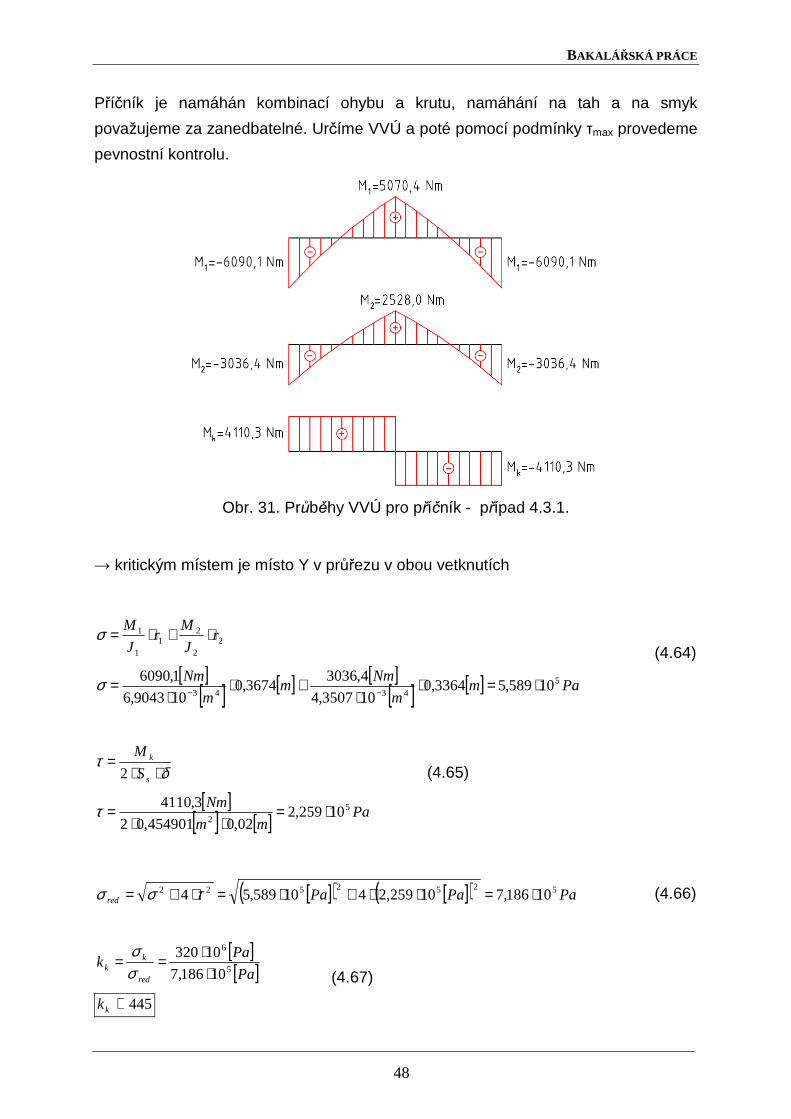
Příčník je namáhán kombinací ohybu a krutu, namáhání na tah a na smyk
považujeme za zanedbatelné. Určíme VVÚ a poté pomocí podmínky τmax provedeme
pevnostní kontrolu.
Obr. 31. Průběhy VVÚ pro příčník - případ 4.3.1.
→ kritickým místem je místo Y v průřezu v obou vetknutích
22
21
1
1 rJ
Mr
J
M⋅+⋅=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310589,53364,0
103507,4
4,30363674,0
109043,6
1,6090 ⋅=⋅⋅
+⋅⋅
= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10259,202,0454901,02
3,4110 ⋅=⋅⋅
=τ
[ ]( ) [ ]( ) PaPaPared5252522 10186,710259,2410589,54 ⋅=⋅⋅+⋅=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 5
6
10186,7
10320
⋅⋅==
σσ
445≅kk
(4.64)
(4.65)
(4.66)
(4.67)

BAKALÁ ŘSKÁ PRÁCE
49
Příčník je vzhledem k MSP bezpečný. Koeficient bezpečnosti kk je opět řádově vyšší
než 1.
4.3.2 Výpočet pro krajní polohu smykadla
Vyřešením soustavy rovnic (4.6) až (4.11) získáme hodnoty neznámých v místě B.
NF xB 0, =
NF yB 0, =
NF zB 1,20825, =
NmM xB 3,7445, −=
NmM yB 6,6067, −=
NmM zB 0, =
Dosazením výsledků do rovnic statické rovnováhy (4.59) vypočteme hodnoty
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 0,,, =⇒−=
NFFF yAyByA 0,,, =⇒−=
NFLqFFFF zAGzzBzA 3,9439,,, =⇒⋅+++−=
( ) ( ) NmML
qlLFlLFLFMM xAGzzBxBxA 41122 ,
2
,,, =⇒⋅+−⋅+−⋅+⋅−−=
NmMxFeFMM yATGzyByA 2153,,, −=⇒⋅−⋅−−=
NmMLFMM zAxBzBzA 0,,,, =⇒⋅+−=
Vypočteme svislou tuhost konstrukce v místě hlavy vřeteníku.
∫
∫ ∫ ∫
∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γ
γ γ γ
dyF
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Ww
z
z
k
tS
k
zbzbz
)(
4
)()()(2
2
2
21
1
1
(4.68)
mw 61040,3 −⋅≅
BAKALÁ ŘSKÁ PRÁCE
50
[ ][ ]m
N
w
Fk z
z 61040,3
4000−⋅
==
191018,1 −⋅≅ Nmk z
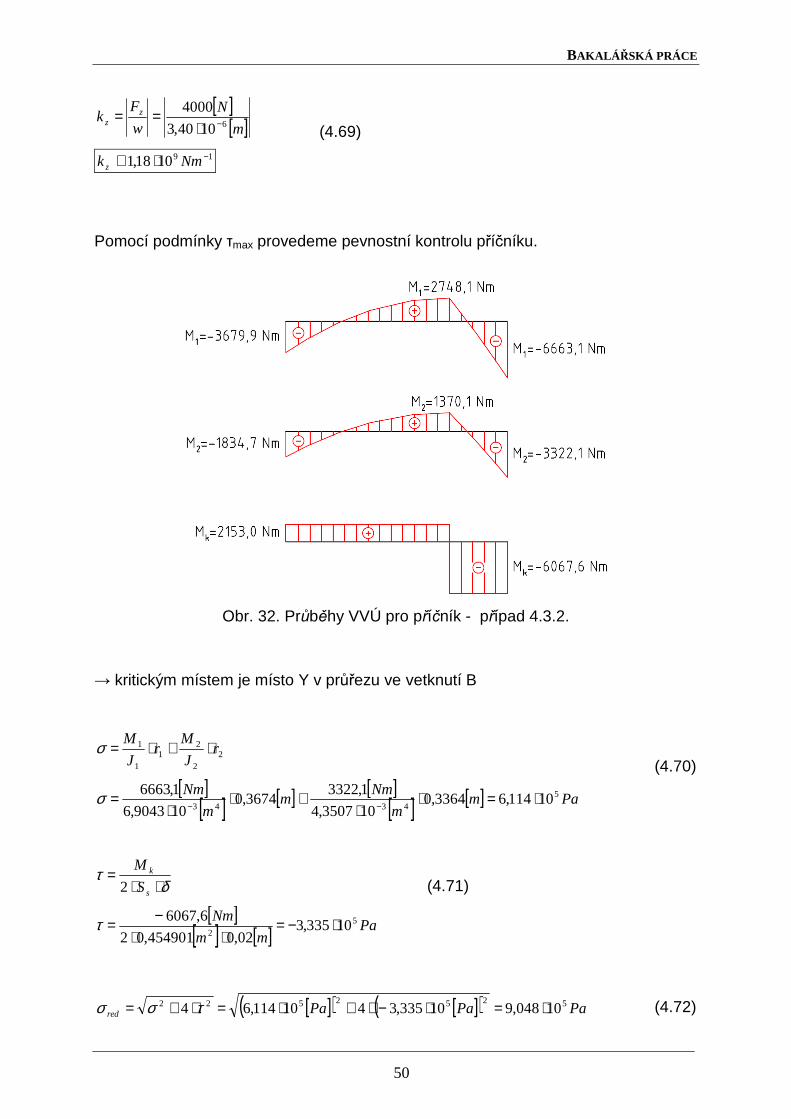
Pomocí podmínky τmax provedeme pevnostní kontrolu příčníku.
Obr. 32. Průběhy VVÚ pro příčník - případ 4.3.2.
→ kritickým místem je místo Y v průřezu ve vetknutí B
22
21
1
1 rJ
Mr
J
M⋅+⋅=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310114,63364,0
103507,4
1,33223674,0
109043,6
1,6663 ⋅=⋅⋅
+⋅⋅
= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10335,302,0454901,02
6,6067 ⋅−=⋅⋅
−=τ
[ ]( ) [ ]( ) PaPaPared5252522 10048,910335,3410114,64 ⋅=⋅−⋅+⋅=⋅+= τσσ
(4.69)
(4.70)
(4.71)
(4.72)
BAKALÁ ŘSKÁ PRÁCE
51
[ ][ ]Pa
Pak
red
kk 5
6
10048,9
10320
⋅⋅==
σσ
353≅kk
Koeficient bezpečnosti kk je řádově vyšší než 1. Součást je bezpečná.
(4.73)
BAKALÁ ŘSKÁ PRÁCE
52
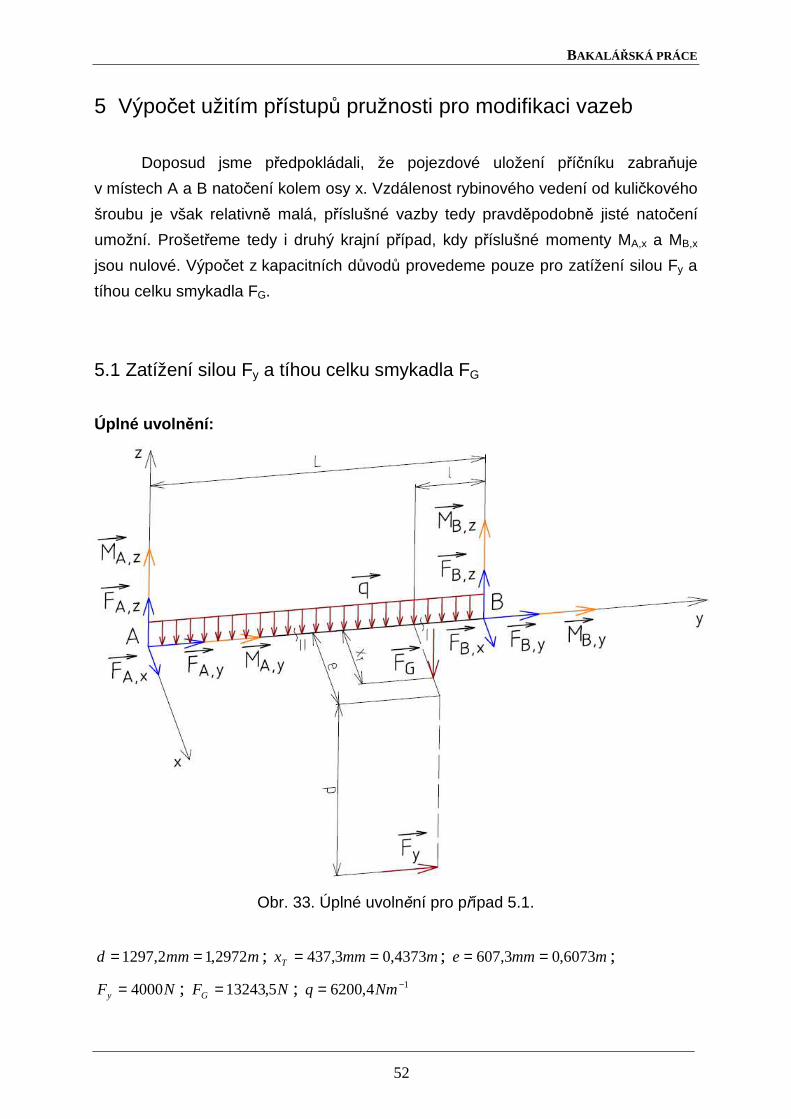
5 Výpočet užitím přístupů pružnosti pro modifikaci vazeb
Doposud jsme předpokládali, že pojezdové uložení příčníku zabraňuje
v místech A a B natočení kolem osy x. Vzdálenost rybinového vedení od kuličkového
šroubu je však relativně malá, příslušné vazby tedy pravděpodobně jisté natočení
umožní. Prošetřeme tedy i druhý krajní případ, kdy příslušné momenty MA,x a MB,x
jsou nulové. Výpočet z kapacitních důvodů provedeme pouze pro zatížení silou Fy a
tíhou celku smykadla FG.
5.1 Zatížení silou Fy a tíhou celku smykadla FG
Úplné uvoln ění:
Obr. 33. Úplné uvolnění pro případ 5.1.
mmmd 2972,12,1297 == ; mmmxT 4373,03,437 == ; mmme 6073,03,607 == ;
NFy 4000= ; NFG 5,13243= ; 14,6200 −= Nmq
BAKALÁ ŘSKÁ PRÁCE
53
Rovnice rovnováhy p říčníku jako celku:
0:0 ,, =+=∑ xBxAx FFF
0:0 ,, =++=∑ yyByAy FFFF
0:0 ,, =⋅−−+=∑ LqFFFF GzBzAz
( ) 02
:02
, =⋅−−⋅−⋅+⋅=∑L
qlLFdFLFM GyzBxA
0:0 ,, =⋅++=∑ TGyByAyA xFMMM
0:0 ,,, =⋅+⋅−+=∑ eFLFMMM yxBzBzAzA
VVÚ:
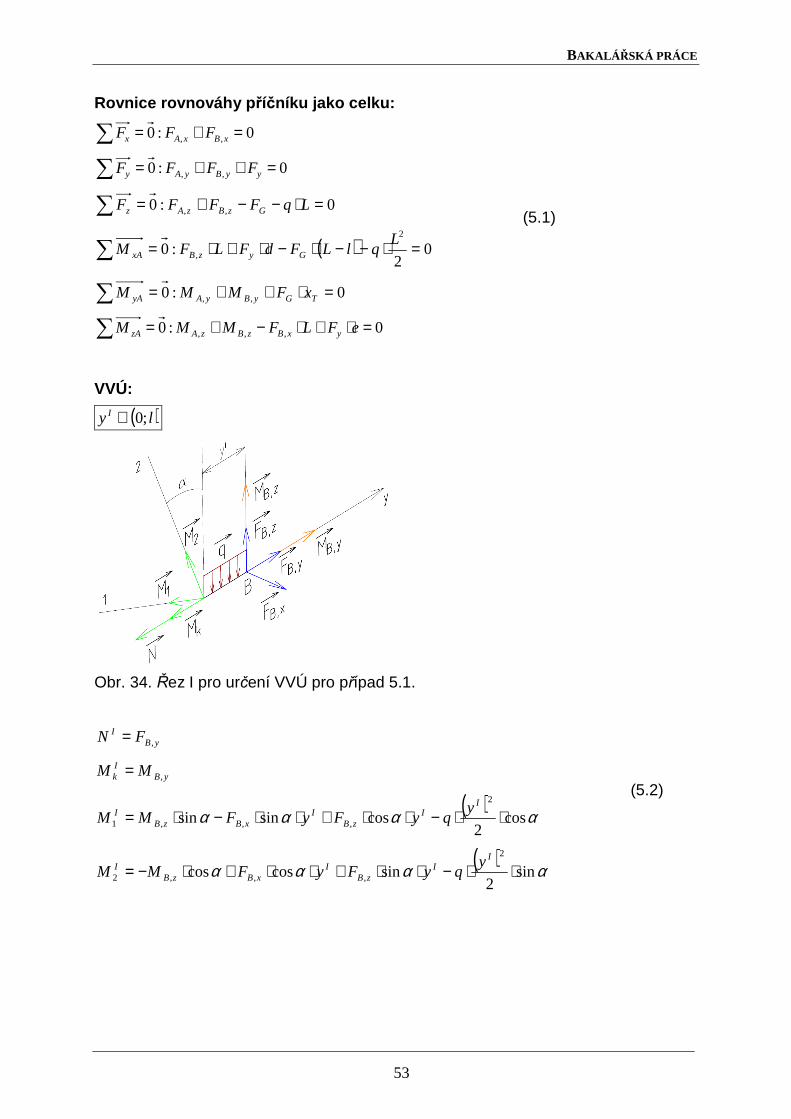
( )ly I ;0∈
Obr. 34. Řez I pro určení VVÚ pro případ 5.1.
yBI FN ,=
yBIk MM ,=
( ) αααα cos2
cossinsin2
,,,1 ⋅⋅−⋅⋅+⋅⋅−⋅=I
IzB
IxBzB
I yqyFyFMM
( ) αααα sin2
sincoscos2
,,,2 ⋅⋅−⋅⋅+⋅⋅+⋅−=I
IzB
IxBzB
I yqyFyFMM
(5.1)
(5.2)
BAKALÁ ŘSKÁ PRÁCE
54
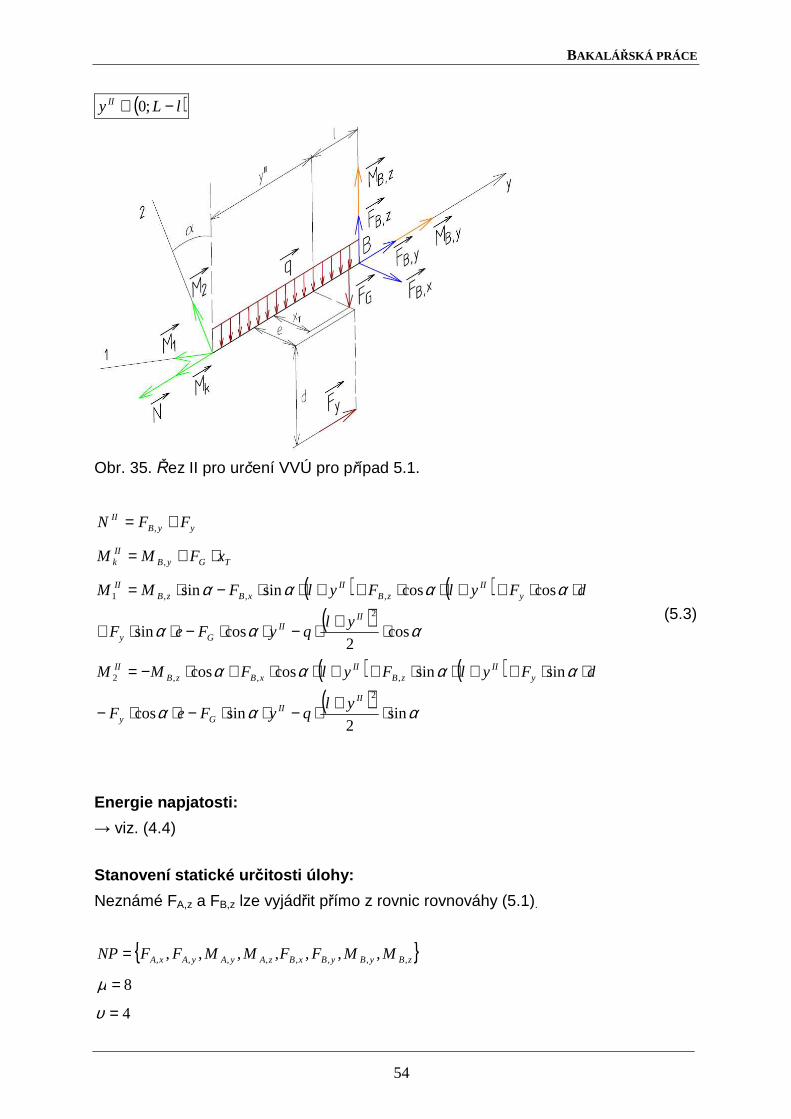
( )lLy II −∈ ;0
Obr. 35. Řez II pro určení VVÚ pro případ 5.1.
yyBII FFN += ,
TGyBIIk xFMM ⋅+= ,
( ) ( )( ) ααα
αααα
cos2
cossin
coscossinsin2
,,,1
⋅+⋅−⋅⋅−⋅⋅+
⋅⋅++⋅⋅++⋅⋅−⋅=II
IIGy
yII
zBII
xBzBII
ylqyFeF
dFylFylFMM
(5.3)
( ) ( )( ) ααα
αααα
sin2
sincos
sinsincoscos2
,,,2
⋅+⋅−⋅⋅−⋅⋅−
⋅⋅++⋅⋅++⋅⋅+⋅−=II
IIGy
yII
zBII
xBzBII
ylqyFeF
dFylFylFMM
Energie napjatosti:
→ viz. (4.4)
Stanovení statické ur čitosti úlohy:
Neznámé FA,z a FB,z lze vyjádřit přímo z rovnic rovnováhy (5.1).
{ }zByByBxBzAyAyAxA MMFFMMFFNP ,,,,,,,, ,,,,,,,=
8=µ
4=υ

BAKALÁ ŘSKÁ PRÁCE
55
448 =−=−= υµs (5.4)
→ počet neznámých parametrů je vyšší než počet použitelných statických podmínek
→ úloha je 4x staticky neurčitá
Částečné uvoln ění:
Prut v místě A ponecháme vetknutý a zapíšeme 4 deformační podmínky v místě B.
0,
=∂∂=
xBF
Wu (5.5)
0,
=∂∂=
yBF
Wv (5.6)
0,
=∂
∂=yB
y M
Wϕ (5.7)
0,
=∂∂=
zBz M
Wϕ (5.8)
5.1.1 Výpočet pro st řední polohu smykadla
Z rovnice součtu momentů v ose x vztažených k bodu A resp. součtu sil v ose z lze
vyjádřit neznámou FB,z resp. FA,z.
( ) NFL
qlLFdFLFM zBGyzBxA 3,1066102
:0 ,
2
, =⇒=⋅−−⋅−⋅+⋅=∑
NFLqFFFF zAGzBzAz 156030:0 ,,, =⇒=⋅−−+=∑
Vyřešením soustavy rovnic (5.5) až (5.8) získáme hodnoty zbylých neznámých
v místě B.
NF xB 2,1538, =
NF yB 2000, −=
NmM yB 7,2895, −=
NmM zB 1318, =

BAKALÁ ŘSKÁ PRÁCE
56
Dosazením výsledků do rovnic statické rovnováhy (5.1) vypočteme hodnoty zbylých
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 2,1538,,, −=⇒−=
NFFFF yAyyByA 2000,,, −=⇒−−=
NmMxFMM yATGyByA 7,2895,,, −=⇒⋅−−=
NmMeFLFMM zAyxBzBzA 517,,,, −=⇒⋅−⋅+−=
Podélná tuhost konstrukce v místě hlavy vřeteníku je rovna podílu zatěžující síly Fy a
posuvu u ve směru osy y v místě působení síly Fy. Posuv u se určí parciální derivací
energie napjatosti podle zatěžující síly Fy. Do výpočtu zahrneme poddajnost
smykadla.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wu
y
x
x
x
y
y
k
tS
k
ybyby
)()(
4
)()()(2
2
2
21
1
1
mu 51097,2 −⋅≅
[ ][ ]m
N
u
Fk y
y 51097,2
4000−⋅
==
181035,1 −⋅≅ Nmk y
(5.9)
(5.10)
BAKALÁ ŘSKÁ PRÁCE
57
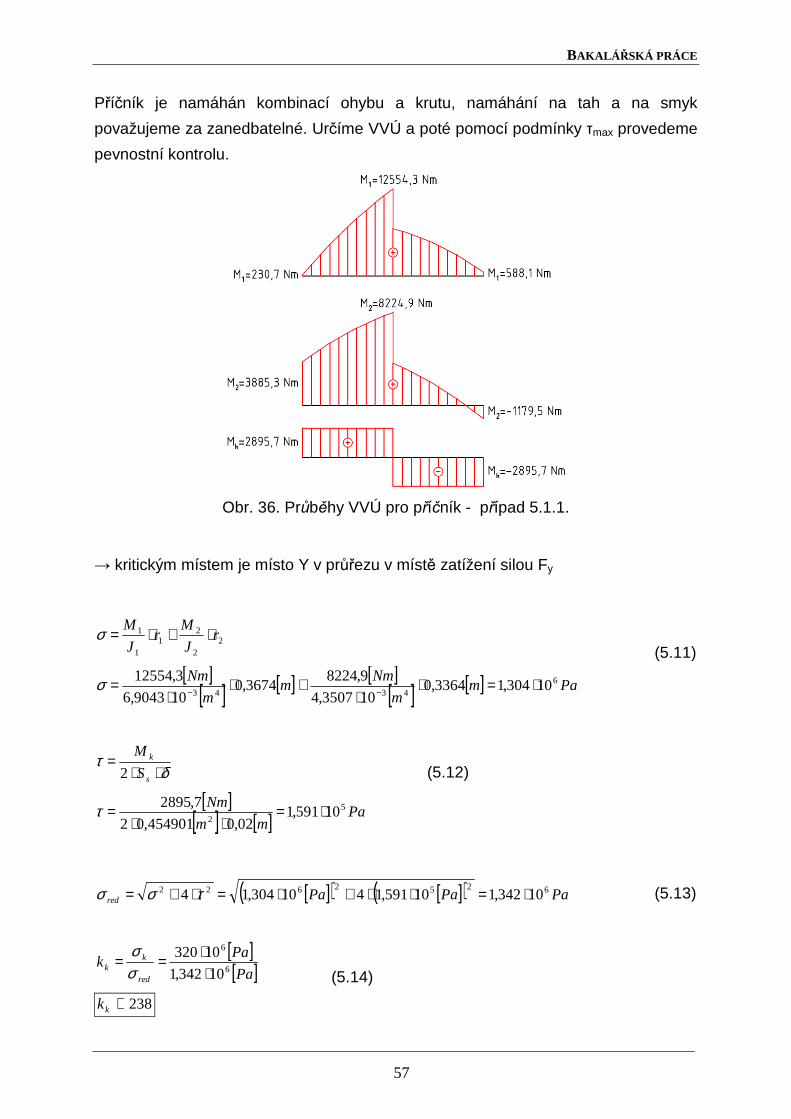
Příčník je namáhán kombinací ohybu a krutu, namáhání na tah a na smyk
považujeme za zanedbatelné. Určíme VVÚ a poté pomocí podmínky τmax provedeme
pevnostní kontrolu.
Obr. 36. Průběhy VVÚ pro příčník - případ 5.1.1.
→ kritickým místem je místo Y v průřezu v místě zatížení silou Fy
22
21
1
1 rJ
Mr
J
M⋅+⋅=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 6
434310304,13364,0
103507,4
9,82243674,0
109043,6
3,12554 ⋅=⋅⋅
+⋅⋅
= −−σ
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10591,102,0454901,02
7,2895 ⋅=⋅⋅
=τ
[ ]( ) [ ]( ) PaPaPared6252622 10342,110591,1410304,14 ⋅=⋅⋅+⋅=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 6
6
10342,1
10320
⋅⋅==
σσ
238≅kk
(5.11)
(5.12)
(5.13)
(5.14)

BAKALÁ ŘSKÁ PRÁCE
58
Příčník je vzhledem k MSP bezpečný. Koeficient bezpečnosti kk je opět řádově vyšší
než 1.
5.1.2 Výpočet pro krajní polohu smykadla
Z rovnice součtu momentů v ose x vztažených k bodu A resp. součtu sil v ose z lze
vyjádřit neznámou FB,z resp. FA,z.
( ) NFL
qlLFdFLFM zBGyzBxA 5,1381402
:0 ,
2
, =⇒=⋅−−⋅−⋅+⋅=∑
NFLqFFFF zAGzBzAz 8,124490:0 ,,, =⇒=⋅−−+=∑
Vyřešením soustavy rovnic (5.5) až (5.8) získáme hodnoty zbylých neznámých
v místě B.
NF xB 1,1473, =
NF yB 4,2952, −=
NmM yB 6,4274, −=
NmM zB 6,742, =
Dosazením výsledků do rovnic statické rovnováhy (5.1) vypočteme hodnoty zbylých
stykových sil a momentů ve vazbě A.
NFFF xAxBxA 1,1473,,, −=⇒−=
NFFFF yAyyByA 6,1047,,, −=⇒−−=
NmMxFMM yATGyByA 8,1516,,, −=⇒⋅−−=
NmMeFLFMM zAyxBzBzA 3,78,,,, −=⇒⋅−⋅+−=
BAKALÁ ŘSKÁ PRÁCE
59
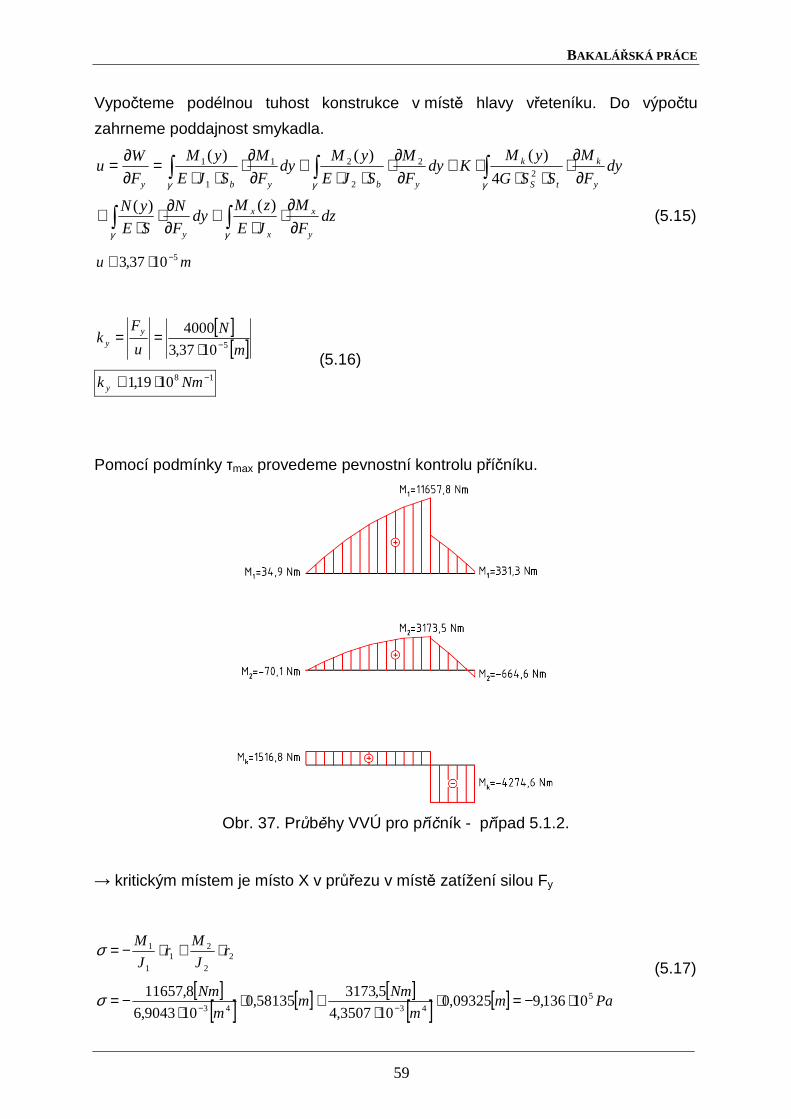
Vypočteme podélnou tuhost konstrukce v místě hlavy vřeteníku. Do výpočtu
zahrneme poddajnost smykadla.
∫∫
∫ ∫ ∫
∂∂
⋅⋅
+∂∂⋅
⋅+
∂∂
⋅⋅⋅
⋅+∂∂⋅
⋅⋅+
∂∂⋅
⋅⋅=
∂∂=
γγ
γ γ γ
dzF
M
JE
zMdy
F
N
SE
yN
dyF
M
SSG
yMKdy
F
M
SJE
yMdy
F
M
SJE
yM
F
Wu
y
x
x
x
y
y
k
tS
k
ybyby
)()(
4
)()()(2
2
2
21
1
1
mu 51037,3 −⋅≅
[ ][ ]m
N
u
Fk y
y 51037,3
4000−⋅
==
181019,1 −⋅≅ Nmk y
Pomocí podmínky τmax provedeme pevnostní kontrolu příčníku.
Obr. 37. Průběhy VVÚ pro příčník - případ 5.1.2.
→ kritickým místem je místo X v průřezu v místě zatížení silou Fy
22
21
1
1 rJ
Mr
J
M⋅+⋅−=σ
[ ]
[ ] [ ] [ ][ ] [ ] Pamm
Nmm
m
Nm 5
434310136,909325,0
103507,4
5,317358135,0
109043,6
8,11657 ⋅−=⋅⋅
+⋅⋅
−= −−σ
(5.15)
(5.16)
(5.17)
BAKALÁ ŘSKÁ PRÁCE
60
δτ
⋅⋅=
s
k
S
M
2 [ ]
[ ] [ ] Pamm
Nm 52
10349,202,0454901,02
6,4274 ⋅−=⋅⋅
−=τ
[ ]( ) [ ]( ) PaPaPared6252522 10027,110349,2410136,94 ⋅=⋅−⋅+⋅−=⋅+= τσσ
[ ][ ]Pa
Pak
red
kk 6
6
10027,1
10320
⋅⋅==
σσ
311≅kk
Koeficient bezpečnosti kk je řádově vyšší než 1. Součást je bezpečná.
(5.18)
(5.19)
(5.20)

BAKALÁ ŘSKÁ PRÁCE
61
6 Ověření výsledků pomocí metody konečných prvků
Tělesa sestavy bylo třeba geometricky zjednodušit. Do výpočtu jsme
nezahrnuli lineární vedení a kuličkové šrouby s maticemi, které jsme považovali za
dostatečně tuhá tělesa. Mezi jednotlivými tělesy byly programem ANSYS Workbench
automaticky vytvořeny tuhé vazby, celá sestava byla k rámu stroje vázana vazbami
Remote v domcích pro matice. Vazby Remote umožňovaly pouze natočení kolem
osy x. Sestavu jsme na ploše hlavy vřeteníku zatížili jmenovitou silou 1000 N
v daném směru a dále jsme zahrnuli vliv vlastní tíhy těles.
Po provedení výpočtu pro hrubou, automaticky generovanou, síť jsme
zkontrolovali celkovou deformaci soustavy v čase a deformační posuvy na ploše
hlavy vřeteníku v daných osách. Byla zjištěna řádová shoda s výsledky obdrženými
analytickým výpočtem.
Síť byla poté zjemněna a byl proveden kontrolní výpočet pro zatížení silou Fy
a tíhou celku smykadla FG pro střední polohu smykadla.
Obr. 38. Model stroje v programu ANSYS Workbench.
BAKALÁ ŘSKÁ PRÁCE
62
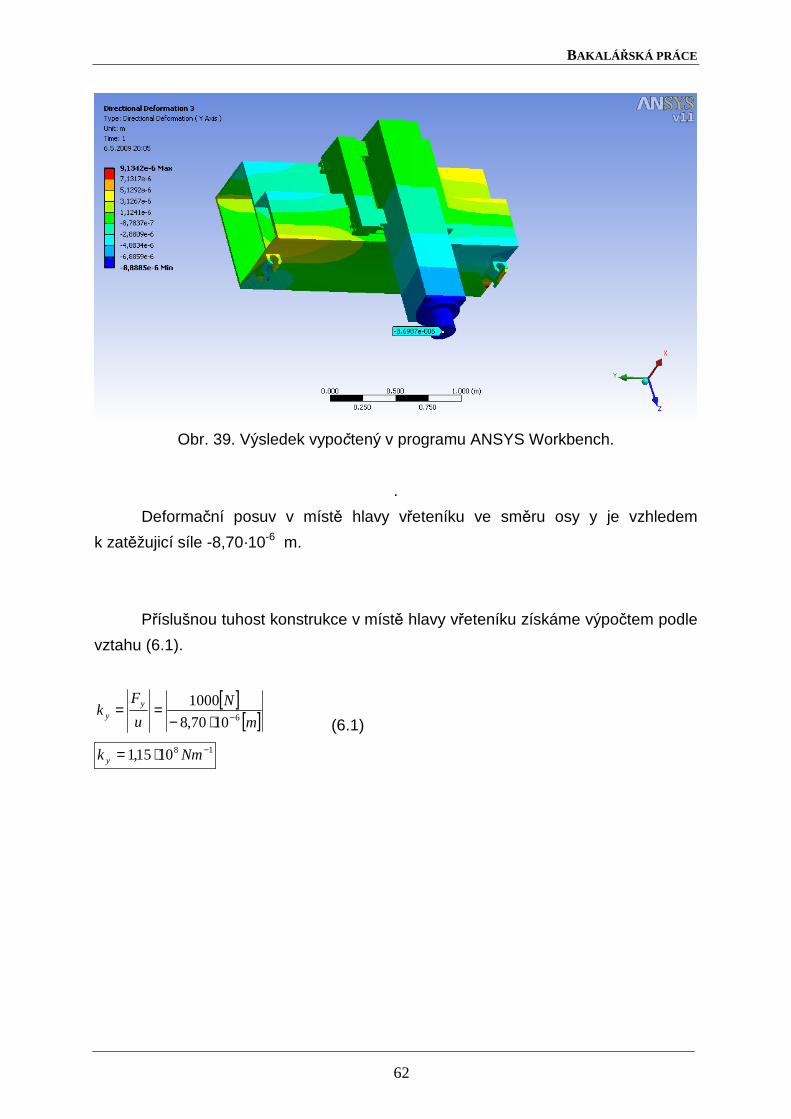
Obr. 39. Výsledek vypočtený v programu ANSYS Workbench.
.
Deformační posuv v místě hlavy vřeteníku ve směru osy y je vzhledem
k zatěžujicí síle -8,70·10-6 m.
Příslušnou tuhost konstrukce v místě hlavy vřeteníku získáme výpočtem podle
vztahu (6.1).
[ ][ ]m
N
u
Fk y
y 61070,8
1000−⋅−
==
181015,1 −⋅= Nmk y
(6.1)
BAKALÁ ŘSKÁ PRÁCE
63
7 Porovnání získaných výsledků
Úloha byla nejprve řešena pro případ vetknutí příčníku. Daný výpočet byl
proveden pro tři případy zátěžných stavů ve střední a krajní poloze smykadla. Poté
byl prošetřen i druhý krajní případ, kdy momenty MA,x a MB,x byly nulové. Výpočet byl
z kapacitních důvodů proveden pouze pro zatížení silou Fy a tíhou celku smykadla
FG.
Porovnejme tedy získané výsledky příslušných tuhostí konstrukce a
bezpečností pro oba případy uložení. Zaměříme se na případ zatížení konstrukce
silou Fy a tíhou celku smykadla FG (případy 4.2 a 5.1).
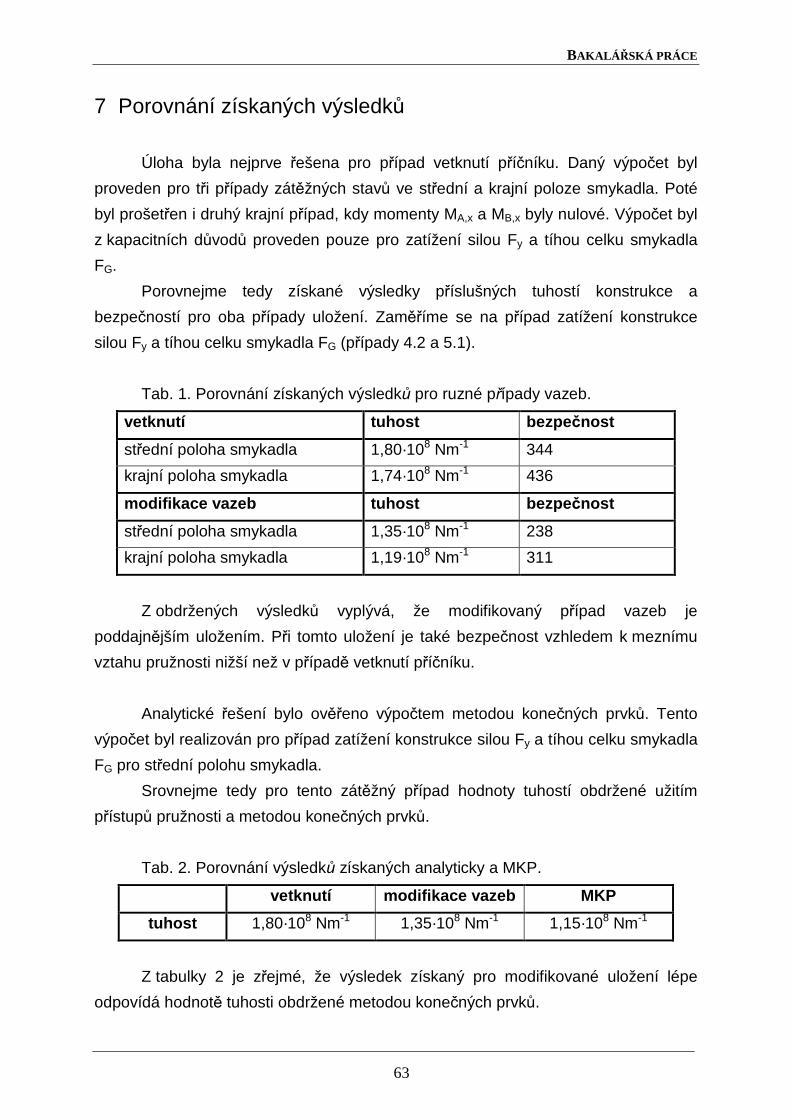
Tab. 1. Porovnání získaných výsledků pro ruzné případy vazeb.
vetknutí tuhost bezpe čnost
střední poloha smykadla 1,80·108 Nm-1 344
krajní poloha smykadla 1,74·108 Nm-1 436
modifikace vazeb tuhost bezpe čnost
střední poloha smykadla 1,35·108 Nm-1 238
krajní poloha smykadla 1,19·108 Nm-1 311
Z obdržených výsledků vyplývá, že modifikovaný případ vazeb je
poddajnějším uložením. Při tomto uložení je také bezpečnost vzhledem k meznímu
vztahu pružnosti nižší než v případě vetknutí příčníku.
Analytické řešení bylo ověřeno výpočtem metodou konečných prvků. Tento
výpočet byl realizován pro případ zatížení konstrukce silou Fy a tíhou celku smykadla
FG pro střední polohu smykadla.
Srovnejme tedy pro tento zátěžný případ hodnoty tuhostí obdržené užitím
přístupů pružnosti a metodou konečných prvků.
Tab. 2. Porovnání výsledků získaných analyticky a MKP.
vetknutí modifikace vazeb MKP
tuhost 1,80·108 Nm-1 1,35·108 Nm-1 1,15·108 Nm-1
Z tabulky 2 je zřejmé, že výsledek získaný pro modifikované uložení lépe
odpovídá hodnotě tuhosti obdržené metodou konečných prvků.
BAKALÁ ŘSKÁ PRÁCE
64
8 Závěr
Předložená práce prezentuje výsledky deformační a pevnostní analýzy
konstrukce moderního obráběcího stroje získané pomocí poznatků prosté pružnosti a
pevnosti.
Vytvořený výpočtový model úlohy vycházející z teorie prutu představuje
značné geometrické zjednodušení řešeného problému, což ovlivňuje přesnost
obdržených výsledků.
Při verifikaci výsledků pomocí metody konečných prvků se prokázalo, že
výsledky získané použitím přístupů prosté pružnosti lze považovat za prakticky
použitelné například pro první předběžný konstrukční návrh obráběcího stroje, popř.
jako podklad pro řádové ověření výsledků vypočtených pomocí MKP.
Analytické řešení úlohy se však pro praxi jeví jako velmi nevhodné z důvodů
časové náročnosti a celkové složitosti výpočtu. Pro matematické operace bylo
nezbytné použít výpočetní programy. Je tedy výhodnější užít speciální software pro
MKP analýzu, kde lze využít již dříve vytvořený 3D model.
BAKALÁ ŘSKÁ PRÁCE
65
9 Seznam použitých zdrojů
[1] TAJMAC-ZPS : Vertikální obráběcí centra [online]. 4.2.2009 [cit. 2009-04-04].
Dostupný z WWW: <http://www.tajmac-zps.cz/c1220cz.html>.
[2] JANÍČEK, Přemysl, et al. Mechanika těles : Pružnost a pevnost I. 1. vyd. Brno :
Akademické nakladatelství CERM, s.r.o., 2004. 287 s. ISBN 80-214-2592-X.
[3] GERE, James M., TIMOSHENKO, Stephen P. Mechanics of Materials. 3rd
edition. London : Chapman & Hall, 1991. 806 s. ISBN 0-412-36880-3.
[4] ATSCHERKAN, N. S. Werkzeugmaschinen : Berechnung und Konstruktion -
Band I. Berlin : Verlag Technik, 1952. 601 s.
[5] ČSN 42 2305. Tvárná litina 42 2305 : feriticko – perlitická. Brno : Státní
výzkumný ústav materiálu, 1975. 6 s.
[6] FLORIAN, Zdeněk, ONDRÁČEK, Emanuel, PŘIKRYL, Karel. Mechanika těles :
Statika. 1. vyd. Brno : Akademické nakladatelství CERM, s.r.o., 2003. 182 s.
ISBN 80-214-2491-5.
[7] ONDRÁČEK, Emanuel, et al. Mechanika těles : Pružnost a pevnost II. 2. vyd.
Brno : Akademické nakladatelství CERM, s.r.o., 2006. 262 s. ISBN 80-214-
3260-8.
[8] HÖSCHL, Cyril. Pružnost a pevnost ve strojnictví. 1. vyd. Praha : SNTL –
Nakladatelství technické literatury, 1971. 376 s. ISBN 04-021-71.
[9] VAVŘÍK, Ivan, BLECHA, Petr, HAMPL, Josef. Výrobní stroje a zařízení :
Sylabus přednášek pro kombinované bakalářské studium. 1. vyd. [s.l.] : [s.n.],
2002. 104 s. Dostupný z WWW:
<http://simulace.fme.vutbr.cz/stranky/studium/opory.texy>.
BAKALÁ ŘSKÁ PRÁCE
66
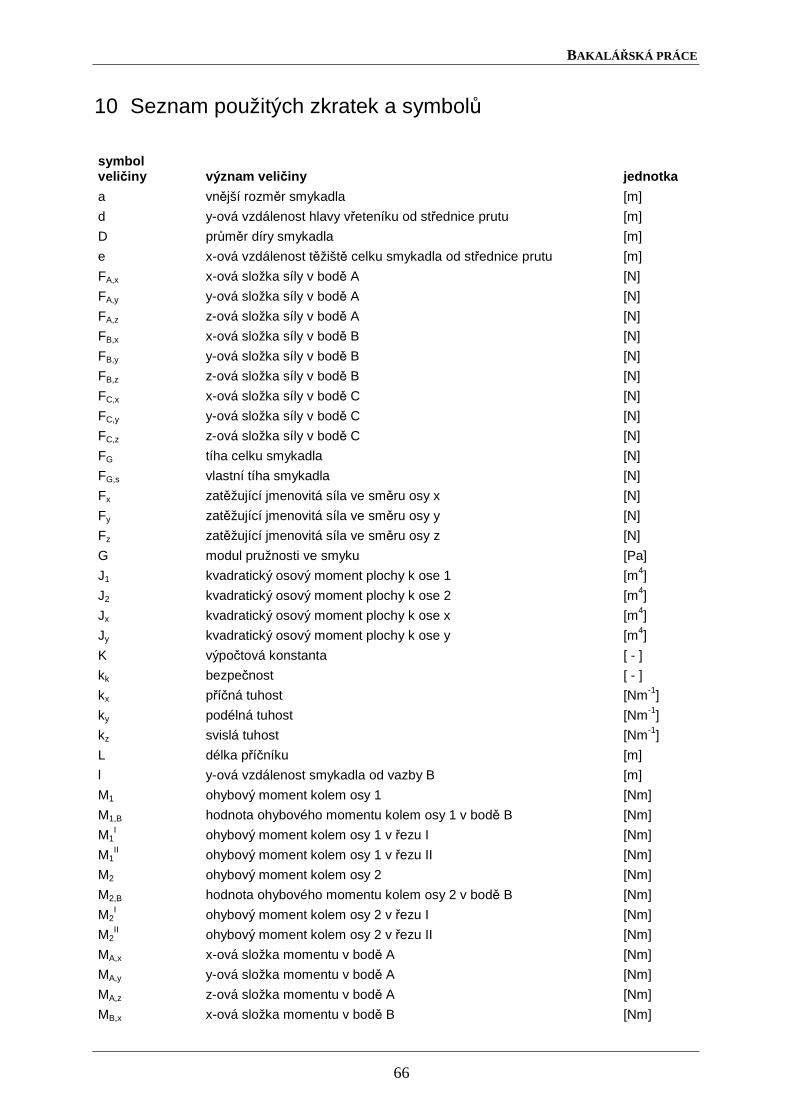
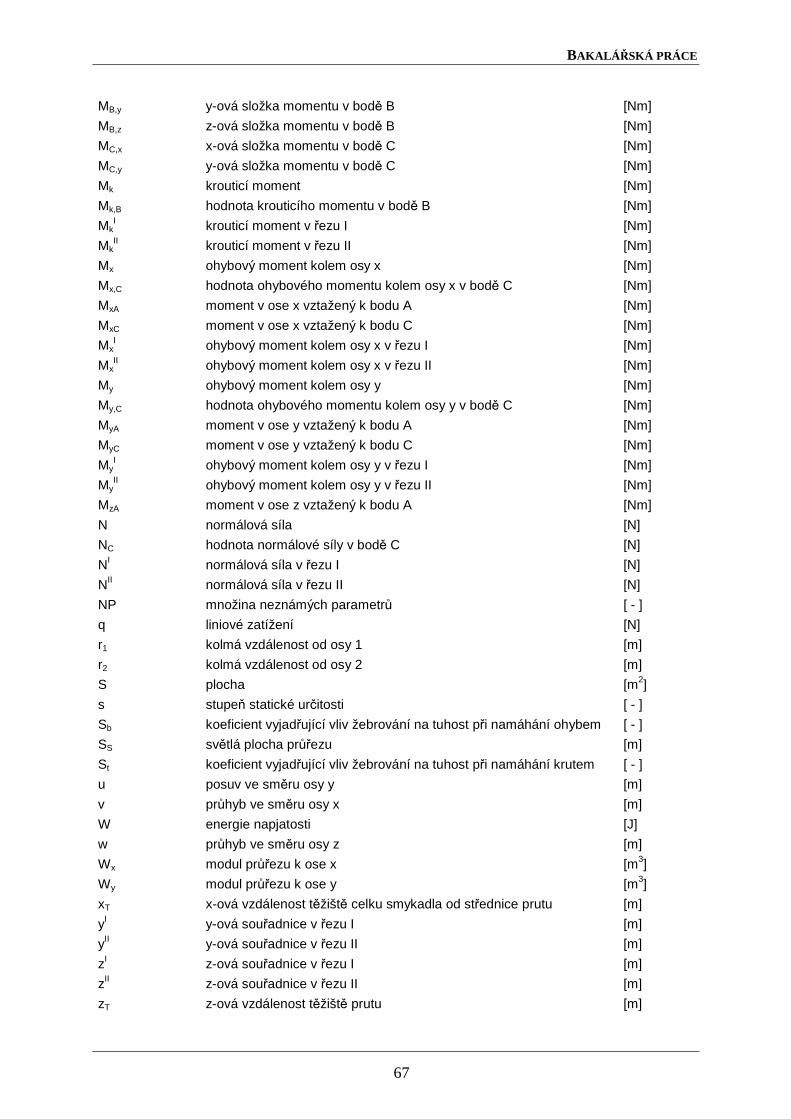
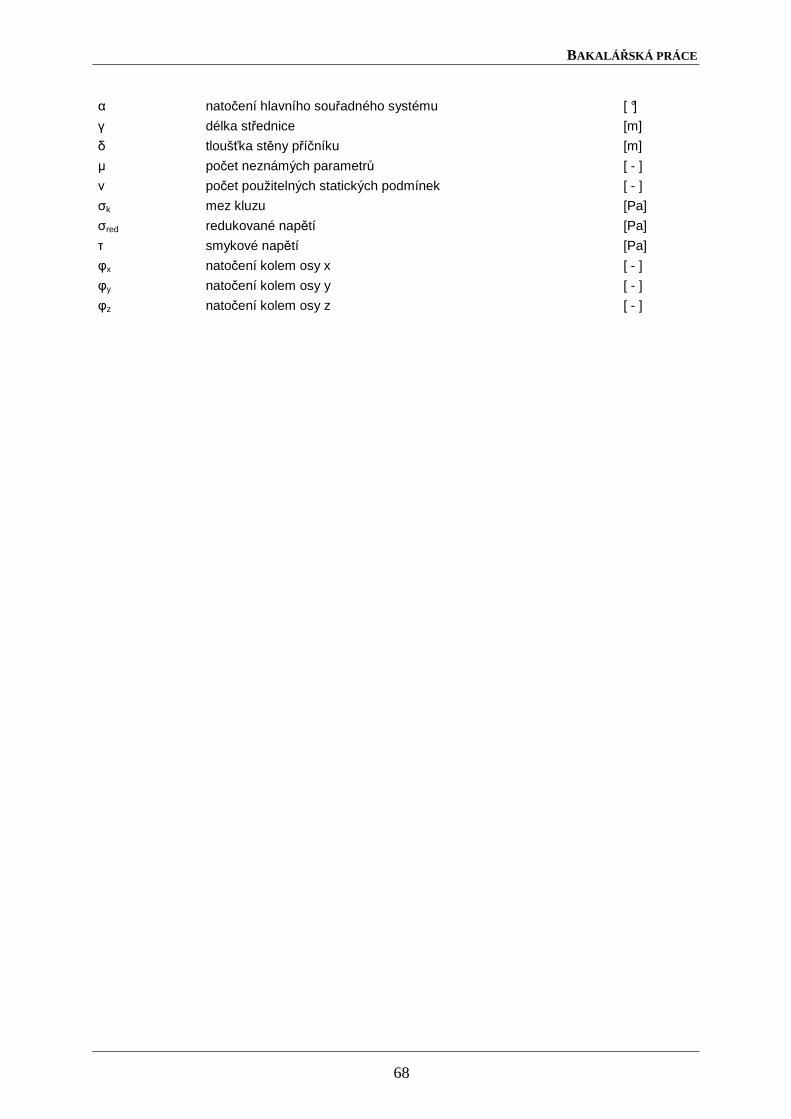
10 Seznam použitých zkratek a symbolů
symbol veličiny význam veli činy jednotka
a vnější rozměr smykadla [m]
d y-ová vzdálenost hlavy vřeteníku od střednice prutu [m]
D průměr díry smykadla [m]
e x-ová vzdálenost těžiště celku smykadla od střednice prutu [m]
FA,x x-ová složka síly v bodě A [N]
FA,y y-ová složka síly v bodě A [N]
FA,z z-ová složka síly v bodě A [N]
FB,x x-ová složka síly v bodě B [N]
FB,y y-ová složka síly v bodě B [N]
FB,z z-ová složka síly v bodě B [N]
FC,x x-ová složka síly v bodě C [N]
FC,y y-ová složka síly v bodě C [N]
FC,z z-ová složka síly v bodě C [N]
FG tíha celku smykadla [N]
FG,s vlastní tíha smykadla [N]
Fx zatěžující jmenovitá síla ve směru osy x [N]
Fy zatěžující jmenovitá síla ve směru osy y [N]
Fz zatěžující jmenovitá síla ve směru osy z [N]
G modul pružnosti ve smyku [Pa]
J1 kvadratický osový moment plochy k ose 1 [m4]
J2 kvadratický osový moment plochy k ose 2 [m4]
Jx kvadratický osový moment plochy k ose x [m4]
Jy kvadratický osový moment plochy k ose y [m4]
K výpočtová konstanta [ - ]
kk bezpečnost [ - ]
kx příčná tuhost [Nm-1]
ky podélná tuhost [Nm-1]
kz svislá tuhost [Nm-1]
L délka příčníku [m]
l y-ová vzdálenost smykadla od vazby B [m]
M1 ohybový moment kolem osy 1 [Nm]
M1,B hodnota ohybového momentu kolem osy 1 v bodě B [Nm]
M1I ohybový moment kolem osy 1 v řezu I [Nm]
M1II ohybový moment kolem osy 1 v řezu II [Nm]
M2 ohybový moment kolem osy 2 [Nm]
M2,B hodnota ohybového momentu kolem osy 2 v bodě B [Nm]
M2I ohybový moment kolem osy 2 v řezu I [Nm]
M2II ohybový moment kolem osy 2 v řezu II [Nm]
MA,x x-ová složka momentu v bodě A [Nm]
MA,y y-ová složka momentu v bodě A [Nm]
MA,z z-ová složka momentu v bodě A [Nm]
MB,x x-ová složka momentu v bodě B [Nm]
BAKALÁ ŘSKÁ PRÁCE
67
MB,y y-ová složka momentu v bodě B [Nm]
MB,z z-ová složka momentu v bodě B [Nm]
MC,x x-ová složka momentu v bodě C [Nm]
MC,y y-ová složka momentu v bodě C [Nm]
Mk krouticí moment [Nm]
Mk,B hodnota krouticího momentu v bodě B [Nm]
MkI krouticí moment v řezu I [Nm]
MkII krouticí moment v řezu II [Nm]
Mx ohybový moment kolem osy x [Nm]
Mx,C hodnota ohybového momentu kolem osy x v bodě C [Nm]
MxA moment v ose x vztažený k bodu A [Nm]
MxC moment v ose x vztažený k bodu C [Nm]
MxI ohybový moment kolem osy x v řezu I [Nm]
MxII ohybový moment kolem osy x v řezu II [Nm]
My ohybový moment kolem osy y [Nm]
My,C hodnota ohybového momentu kolem osy y v bodě C [Nm]
MyA moment v ose y vztažený k bodu A [Nm]
MyC moment v ose y vztažený k bodu C [Nm]
MyI ohybový moment kolem osy y v řezu I [Nm]
MyII ohybový moment kolem osy y v řezu II [Nm]
MzA moment v ose z vztažený k bodu A [Nm]
N normálová síla [N]
NC hodnota normálové síly v bodě C [N]
NI normálová síla v řezu I [N]
NII normálová síla v řezu II [N]
NP množina neznámých parametrů [ - ]
q liniové zatížení [N]
r1 kolmá vzdálenost od osy 1 [m]
r2 kolmá vzdálenost od osy 2 [m]
S plocha [m2]
s stupeň statické určitosti [ - ]
Sb koeficient vyjadřující vliv žebrování na tuhost při namáhání ohybem [ - ]
SS světlá plocha průřezu [m]
St koeficient vyjadřující vliv žebrování na tuhost při namáhání krutem [ - ]
u posuv ve směru osy y [m]
v průhyb ve směru osy x [m]
W energie napjatosti [J]
w průhyb ve směru osy z [m]
Wx modul průřezu k ose x [m3]
Wy modul průřezu k ose y [m3]
xT x-ová vzdálenost těžiště celku smykadla od střednice prutu [m]
yI y-ová souřadnice v řezu I [m]
yII y-ová souřadnice v řezu II [m]
zI z-ová souřadnice v řezu I [m]
zII z-ová souřadnice v řezu II [m]
zT z-ová vzdálenost těžiště prutu [m]
BAKALÁ ŘSKÁ PRÁCE
68
α natočení hlavního souřadného systému [ °]
γ délka střednice [m]
δ tloušťka stěny příčníku [m]
µ počet neznámých parametrů [ - ]
ν počet použitelných statických podmínek [ - ]
σk mez kluzu [Pa]
σred redukované napětí [Pa]
τ smykové napětí [Pa]
φx natočení kolem osy x [ - ]
φy natočení kolem osy y [ - ]
φz natočení kolem osy z [ - ]

BAKALÁ ŘSKÁ PRÁCE
69
11 Seznam příloh
Příloha 1 … výkres příčníku
Příloha 2 … výkres smykadla





























