Embed Size (px)
Citation preview

VYSOKÉ UČENÍ TECHNICKÉ V BRNĚBRNO UNIVERSITY OF TECHNOLOGY
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCHTECHNOLOGIÍÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ
FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATIONDEPARTMENT OF BIOMEDICAL ENGINEERING
ÚZKOPÁSMOVÁ FILTRACE SIGNÁLŮ EKG
NARROW BAND FILTERING OF ECG SIGNALS
BAKALÁŘSKÁ PRÁCEBACHELOR'S THESIS
AUTOR PRÁCE JAN RYŠÁNEKAUTHOR
VEDOUCÍ PRÁCE doc. Ing. JIŘÍ KOZUMPLÍK, CSc.SUPERVISOR
BRNO 2010

VYSOKÉ UČENÍTECHNICKÉ V BRNĚ
Fakulta elektrotechniky a komunikačních technologií
Ústav biomedicínského inženýrství
Bakalářská prácebakalářský studijní obor
Biomedicínská technika a bioinformatika
Student: Jan Ryšánek ID: 109613Ročník: 3 Akademický rok: 2009/2010
NÁZEV TÉMATU:
Úzkopásmová filtrace signálů EKG
POKYNY PRO VYPRACOVÁNÍ:
Prostudujte možnosti potlačení úzkopásmových rušivých signálů v signálech EKG a stanovte požadavkyna číslicové filtry pro potlačení síťového brumu a driftu. V prostředí Matlab realizujte lineární filtry typuFIR a IIR pro potlačení uvedených typů rušení. Vyberte nejvhodnější varianty filtrů z hlediskaminimalizace zkreslení užitečného signálu. Dále prostudujte možnosti adaptivní filtrace pro potlačenísíťového brumu v signálech EKG. Navrhněte a v prostředí Matlab realizujte adaptivní filtry pro potlačenísíťového brumu a zhodnoťte výhody a nevýhody adaptivní filtrace ve srovnání s filtrací lineární. Všechnyfiltry navrhujte pro vzorkovací kmitočet 500 Hz.
DOPORUČENÁ LITERATURA:
[1] Jan, J.: Číslicová filtrace, analýza a restaurace signálů. VUT v Brně, nakl. VUTIUM, Brno, 2002.[2] Kozumplík, J., Kolář, R., Jan, J.: Číslicové zpracování signálů v prostředí Matlab. Skripta FEKT VUTv Brně, 2001.
Termín zadání: 8.2.2010 Termín odevzdání: 24.5.2010
Vedoucí práce: doc. Ing. Jiří Kozumplík, CSc.
prof. Ing. Ivo Provazník, Ph.D.Předseda oborové rady
UPOZORNĚNÍ:
Autor bakalářské práce nesmí při vytváření bakalářské práce porušit autorská práva třetích osob, zejména nesmízasahovat nedovoleným způsobem do cizích autorských práv osobnostních a musí si být plně vědom následkůporušení ustanovení § 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávníchdůsledků vyplývajících z ustanovení části druhé, hlavy VI. díl 4 Trestního zákoníku č.40/2009 Sb.

ABSTRAKTTato prace se zabyva predzpracovanım EKG signalu. Ucelem predzpracovanı je takovauprava signalu, ktera je vyhodnejsı pro jeho naslednou analyzu. Cılem prace je filtro-vat EKG signal vhodnymi metodami linearnı a adaptivnı filtrace vedoucıch k potlacenınezadoucıho rusenı. Dalsım krokem je porovnanı ruzneho stupne uspesnosti filtracedle dosazenych vysledku jednotlivymi metodami. Kriteria uspesnosti filtrace vychazıze zakladnıch pozadavku na cıslicove filtry. Navrh filtru je realizovan v programovemprostredı matlab. K realizaci je vyuzito filtru typu FIR, IIR a dvou typu filtru adaptivnıch.
KLICOVA SLOVAEKG signal, linearnı filtrace, adaptivnı filtrace, cıslicove filtry, matlab, FIR, IIR, typyrusenı v EKG signalu
ABSTRACTThis work deals with ECG signal preprocessing. Purpose of the preprocessing is adjust-ment of signal which is favorable for its subsequent analysis. The objective of this workis to filter the ECG signal by suitable methods of linear and adaptive filtering leading tothe suppression of unwanted interference. The next step is to compare different degreesof success filtering thanks to results which were reached by the indivudual methods. Cri-terions of success filtering are based on the basic requirements for digital filters. Designof filters is realized in matlab programme. To realization is used FIR and IIR type offilters and adaptive type of filters
KEYWORDSECG signal, linear filtering, adaptive filtering, digital filters, matlab, FIR, IIR, types ofinterference in ECG signal
RYSANEK, Jan Uzkopasmova filtrace signalu EKG: bakalarska prace. Brno: Vysokeucenı technicke v Brne, Fakulta elektrotechniky a komunikacnıch technologiı, USTAVBIOMEDICINSKEHO INZENYRSTVI, 2010. 50 s. Vedoucı prace byl doc. Ing. Jirı Ko-zumplık, CSc.

PROHLASENI
Prohlasuji, ze svou bakalarskou praci na tema”Uzkopasmova filtrace signalu EKG“
jsem vypracoval samostatne pod vedenım vedoucıho bakalarske prace a s pouzitım od-
borne literatury a dalsıch informacnıch zdroju, ktere jsou vsechny citovany v praci a uve-
deny v seznamu literatury na konci prace.
Jako autor uvedene bakalarske prace dale prohlasuji, ze v souvislosti s vytvorenım
teto bakalarske prace jsem neporusil autorska prava tretıch osob, zejmena jsem nezasahl
nedovolenym zpusobem do cizıch autorskych prav osobnostnıch a jsem si plne vedom
nasledku porusenı ustanovenı § 11 a nasledujıcıch autorskeho zakona c. 121/2000 Sb.,
vcetne moznych trestnepravnıch dusledku vyplyvajıcıch z ustanovenı § 152 trestnıho
zakona c. 140/1961 Sb.
Brno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(podpis autora)
PODEKOVANI
Dekuji vedoucımu bakalarske prace doc. Ing. Jirımu Kozumplıkovi, CSc. za ucinnou
metodickou, pedagogickou a odbornou pomoc a dalsı cenne rady pri zpracovanı me
bakalarske prace.
V Brne dne . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(podpis autora)

OBSAH
Uvod 7
1 Typy rusenı v EKG signalu 8
1.1 Fyzikalnı artefakty . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Biologicke artefakty . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Linearnı filtrace 10
2.1 Zakladnı pozadavky na cıslicove filtry . . . . . . . . . . . . . . . . . . 10
2.2 FIR filtry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 IIR filtry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Adaptivnı filtrace 17
3.1 Princip adaptivnıho filtru . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Adaptivnı filtr pro potlacenı sıt’oveho brumu . . . . . . . . . . . . . . 18
3.3 Adaptivnı filtr se dvema vahami . . . . . . . . . . . . . . . . . . . . . 18
4 Programova realizace linearnıch filtru 20
4.1 Odstranovanı sıt’oveho brumu . . . . . . . . . . . . . . . . . . . . . . 20
4.2 Odstranovanı driftu . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Programova realizace adaptivnıch filtru 40
5.1 Odstranovanı sıt’oveho brumu . . . . . . . . . . . . . . . . . . . . . . 40
5.2 Zavislost chyby filtrace na kolısanı sıt’oveho kmitoctu . . . . . . . . . 45
Zaver 47
Literatura 48
A Prıloha, obsah prilozeneho cd 50

UVOD
Elektrokardiografie je diagnosticka metoda, ktera umoznuje snımat a zaznamenavat
elektrickou aktivitu srdce. K merenı elektricke aktivity standardne vyuzıvame 12–ti
svodovy system. Na kazdem z techto svodu muzeme spolu s uzitecnym signalem
namerit i rusenı, proto je dulezite namereny signal vhodne predzpracovat. [11]
Tato prace se zabyva nejcastejsım typem predzpracovanı EKG signalu – fil-
tracı. K filtraci EKG signalu bude vyuzito linearnıch a adaptivnıch filtru navrzenych
v prostredı Matlab. Linearnı filtry navrzene jako pasmove zadrze a hornı propusti
budou z EKG signalu odstranovat dva typy rusenı: sıt’ovy brum (rusenı z elektro-
vodne sıte) a drift (kolısanı nulove izolinie). Adaptivnıch filtru bude take vyuzito
k odstranenı brumu a dale k prozkoumanı vlivu kolısanı sıt’oveho kmitoctu na chybu
filtrace. Vstupem kazdeho filtru bude tedy zaruseny EKG signal a vystupem signal,
u ktereho se v idealnım prıpade rusenı nevyskytne.
Hlavnım cılem prace je programove realizovat jednotlive typy filtru a porovnat
uspesnost filtrace. Na zaklade tohoto srovnanı se pokusit o doporucenı, ktery z na-
vrhovanych filtru ci skupina filtru je k odstranenı prıslusneho rusenı nejlepsı a za
jakych podmınek.
Vyuzite EKG signaly jsou bez sıt’oveho zarusenı ovsem s kolısajıcı nulovou liniı.
V prıpade odstranovanı sıt’oveho brumu bude postup takovy, ze signal nejprve umele
zarusıme harmonickou slozkou na frekvenci 50 Hz pres cely prubeh signalu a pote
privedeme na vstup daneho filtru. Navrh se bude skladat ze 4 typu linearnıch filtru.
U FIR filtru se jedna o: okenkovou metodu pomocı funkce fir1, Lynnovy filtry a nu-
lovanı spektralnıch car. Jako IIR filtr poslouzı Butterworthuv filtr 2.radu. Dale bude
vyuzito dvou typu adaptivnıch filtru: prvnı je adaptivnı filtr s jednou vahou (jednım
pomocnym signalem) a nasledne adaptivnı filtr se dvema vahami. Uspesnost filtrace
u sıt’oveho brumu bude dana rozdılem puvodnıho nezaruseneho signalu a signalu
filtrovaneho. Odectenım techto signalu vznikne rusenı, ktere se filtracı neodstranilo.
Pri odstranovanı driftu takto postupovat nelze, nebot’ puvodnı signal je v tomto
ohledu jiz driftem zarusen. Zde bude hodnocenı zalozeno na vizualnım posouzenı
signalu.
Prvnı kapitola resı nejcastejsı typy rusenı, ktere se mohou v EKG signalu vysky-
tovat. V nasledujıcı kapitole jsou na uvod definovany zakladnı pozadavky na cıslicove
filtry, dale je zde zmınka o linearnı filtraci, zakladnıch vlastnostech FIR a IIR filtru
a podrobneji jsou rozebrany vyse uvedene typy filtru, jejichz principy jsou vyuzity
pri navrhu. Obdobne i tretı kapitola priblizuje principy adaptivnıch filtru. Kapitola
ctvrta a pata se tykajı programovych realizacı vyse uvedenych filtru. Jsou zde take
uvedeny graficke vystupy filtru, vysledky jednotlivych metod a jejich srovnanı.
7

1 TYPY RUSENI V EKG SIGNALU
1.1 Fyzikalnı artefakty
Brum
Rusenı zpusobene elektrovodnou sıtı je nejobvyklejsım prıpadem rusenı. Jedna se
o uzkopasmove, temer harmonicke rusenı v oblasti 50 Hz a vyssıch harmonickych
slozek. Prıcinou tohoto typu rusenı je nedodrzenı zasad spravneho zemnenı, eventu-
alne je-li merıcı system umısten v blızkosti vykonoveho spotrebice (rentgen, lednicka,
strojovna vytahu). [3, 8]
Kolısanı sıt’oveho kmitoctu v elektrovodne sıti
Kolısanı kmitoctu je popsano normou. Dle distribucnı spolecnosti E.ON se kmitocet
sıte, jako jedna ze zakladnıch charakteristik popisujıcı kvalitu dodavane elektricke
energie, muze pohybovat v rozmezı 49, 5 − 50, 5 Hz. Skupina CEZ uvadı z hle-
diska kmitoctu tzv. normalnı provoznı stav elektrizacnı soustavy, ktery je stanoven
kolısanım v rozmezı 49, 8 − 50, 2 Hz. Realne merenı kolısanı kmitoctu zobrazuje
nasledujıcı graf.
Obr. 1.1: Kolısanı sıt’oveho kmitoctu v el. sıti, prevzato z [3]
Grafy byly zıskany od UEEN FEKT VUT v Brne. Merenı probıhalo pred tremi
roky v nekolika dnech po 12-ti hodinovych intervalech. Kolısanı kmitoctu se zde
8

pohybuje v radech setin Hz. Linearnı filtry mohou mıt nulovy prenos pouze presne
na 50 Hz a od teto hodnoty prenos narusta. Tudız kolısanı kmitoctu muze mıt vliv
na filtraci 50 Hz slozky. [5, 9, 10]
Drift
Toto rusenı se nam v signalu projevuje jako kolısanı nulove linie, ktere muze byt
zpusobeno nızkou jakostı elektrod, spatneho kontaktu elektrod s kuzı, biochemickymi
zmenami v mıste ulozenı elektrod. Ke vzniku muze take dochazet pri pohybu pred-
metu z elektrostatickych hmot v blızkosti vstupnıch obvodu extremne citlivych bi-
ozesilovacu nebo v blızkosti merene osoby. Dalsı nejcastejsı vlivy jsou dychanı, ci
drobne pohyby merene osoby. Drift je charakteristicky jako nızkofrekvencnı rusenı
obvykle do 2 Hz.
Mezi dalsı fyzikalnı artefakty muzeme radit:
• technologicky vliv elektrod
• impulsnı rusenı
• nedostatecne stınenı magnetickych polı
• sum elektronickych obvodu zarızenı
1.2 Biologicke artefakty
Myopotencialy
Jedna se o rusenı, ktera jsou zpusobena svalovou cinnostı merene osoby (pohybove
artefakty), ve velke mıre se projevuje pri zatezovem EKG, kdy uroven rusenı roste
se stupnem zateze. Tento typ rusenı je ze vsech trı typu nejobtıznejsı na odstranenı,
protoze se jedna o sirokopasmove rusenı od 10 Hz (u zatezoveho EKG), z cehoz
vyplyva, ze se nam toto rusenı prekryva s diagnosticky vyznamnou oblastı QRS
komplexu.
Mezi dalsı biologicke artefakty muzeme radit:
• vzajemny vliv organu
• biologicke rytmy – ovarialnı cyklus, geofyzikalnı cykly [3, 8]
9

2 LINEARNI FILTRACE
Jednou velkou skupinou filtru, jsou filtry linearnı. Radıme sem jak FIR tak i IIR
filtry. Tyto filtry se vyznacujıcı tım, ze pro ne platı princip superpozice, ktery nam
rıka, ze budeme-li poustet jednotlive signaly na vstup filtru, dostaneme soucet jejich
odezev, ktery bude roven situaci, kdy budeme mıt soucet signalu a na vystupu filtru
jejich odezvu. Smysl linearnı filtrace spocıva v tom, ze pozadujeme, aby vysledny
EKG signal byl lepsı nez puvodnı s driftem ci umele zasumeny. Dulezitym faktorem
je jednotkovy impuls. Pokud tento impuls privedeme na vstup linearnıho systemu,
na vystupu dostavame impulsnı charakteristiku, ktera nam popisuje linearnı system
v casove oblasti. Spektrum impulsnı charakteristiky je frekvencnı charakteristika
popisujıcı filtr ve frekvencnı oblasti. Abychom mohli na zaruseny signal aplikovat
nektery z linearnıch filtru, musı tento signal byti slozen z aditivnı smesi uzitecneho
signalu a rusenı. [2]
2.1 Zakladnı pozadavky na cıslicove filtry
Pri navrhu filtru je treba vychazet ze zakladnıch pozadavku, ktere jsou na ne kladeny.
Je to predevsım:
• nejlepsı mozne potlacenı sumu
• nejmensı zkreslenı uzitecneho signalu
• co nejrychlejsı odezva systemu
• minimalnı pamet’ove naroky
pri odstranovanı driftu:
• linearnı fazova charakteristika [1, 12]
A to z toho duvodu, ze drift je nızkofrekvencnı rusenı a nelinearita fazove charakte-
ristiky vede k fazovemu zkreslenı prave v oblasti nızkych kmitoctu. Pokud budeme
mıt na vstupu filtru s nelinearnı fazovou charakteristikou smes dvou harmonickych
slozkek, pak na vystupu filtru dojde k jejich nestejnemu zpozdenı. Fazove zkreslenı
signalu je patrne z obr. 2.1. [3]
10

Obr. 2.1: Fazove zkreslenı na vystupu filtru, prevzato z [3]
2.2 FIR filtry
Mezi zakladnı vlastnosti FIR filtru patrı konecna impulsnı charakteristika a abso-
lutnı stabilita. Obvykly pozadavek na filtry u EKG signalu je dosahnout linearnı
fazove charakteritiky prochazejı nulou, k cemuz potrebujeme symetrickou impulsnı
charakteristiku. FIR filtry mohou byt realizovany nerekurzivne ci rekurzivne. Nere-
kurzivnı realizace se vyznacuje tım, ze filtr ma vsechny poly v pocatku. U rekurzivnı
realizace jsou poly vyruseny nulami. Vhodnejsı je realizace nerekurzivnı. [6]
Okenkova metoda s vyuzitım matlabovske funkce fir1
Princip okenkove metody (vahovanı impulsnı charakteristiky) vychazı z toho, ze
vytvorıme frekvencnı charakteristiku z neomezene dlouhe impulsnı charakteristiky,
popisujıcı pozadovany filtr. Frekvencnı charakteristika je rovna periodicke funkci
kmitoctu a je vyjadrena Fourierovou radou [1]
Gd(ω) = Hd(ejωt) =
∞∑n=−∞
hd(n)e−jωnT , (2.1)
jejız koeficienty jsou hodnoty impulsnı charakteristiky, vychazejıcı ze vztahu [1]
11

hd(n) =T
2π
∫ πT
− πT
Gd(ω)ejωnT dω. (2.2)
V dalsım kroku je zadoucı omezit nekonecne dlouhou impulsnı odezvu, coz pro-
vedeme tak, ze impulsnı odezvu nasobıme tzv. oknem o konecne delce N ome-
zujıcı rozsah a upravujıcı tvar impulsnı odezvy. Dostavame tak soucin dvou signalu,
kde konvoluce jejich spekter udava vyslednou frekvencnı charakteristiku navrzeneho
systemu. [1]
K navrhu okenkove metody v prostredı Matlab lze vyuzıt funkci fir1. Prostred-
nictvım teto funkce je mozne navrhnout FIR filtr s linearnı fazovou charakteristikou.
Funkci je mozne vytvorit jednoduchym zapisem [4]
b = fir1(N,Wn,′ ftype′, window), (2.3)
kde N vyjadruje rad filtru, Wn je normovana frekvence nalezıcı intervalu 〈0; 1〉, coz
odpovıda fvz/2, ’ftype’ znacı druh filtru a window typ pouziteho okna, b je pak
vysledny koeficient odpovıdajıcı citateli prenosove funkce, cili generovany polynom.
Protoze se jedna o FIR filtr, jmenovatel musı byt roven jedne. Pokud zapıseme
funkci v nejjednodussı podobe, cili bez tretıho a ctvrteho parametru v zavorce, tak
funkce bude implicitne generovat filtr typu dolnı propust a vyuzıvat Hammingovo
okno. Hornı propust je mozne navrhnout prıkazem high, ktery dopıseme na tretı
pozici do zavorky za normovanou frekvenci. Pokud chceme navrhnout pasmovou
propust ci pasmovou zadrz, vyuzijeme dvouprvkoveho vektoru, ktery dosadıme za
Wn. Dvouprvkovym vektorem rozumıme dolnı a hornı meznı frekvenci pozadovaneho
filtru. Pasmovou propust pak nadefinujeme prıkazem bandpass, v prıpade pouzitı
pasmove zadrze vyuzijeme parametr stop. Parametr window nam dava moznost
vyuzıt jinych typu oken, nez je Hammingovo. Pro jiny typ okna muzeme tedy vyuzıt
prıkazu napr. chebwin, gausswin, hann, a dalsıch. [4]
Lynnovy filtry
Lynnovy filtry vychazejı z hrebenovych filtru, jsou charakteristicke rovnomernym
rozlozenım nulovych bodu po celem obvodu jednotkove kruznice v ’z’ rovine, nektere
z techto nulovych bodu je mozne vyrusit poly, ktere klademe do mıst, kde chceme
dostat nepropustne pasmo.
• Vyhody:
– jednoduchy navrh
– nenarocny vypocet odezvy
• Nevyhody:
12

– pouzitelnost u pasmovych propustı zavisı na vzorkovacım kmitoctu
Drift K navrhu dolnı propusti lze vychazet z obecneho vztahu vyjadrujıcı rekur-
zivnı realizaci platıcı pro celocıselne K a p [3]
H(z) =1− z−pK
K(1− z−p), (2.4)
pricemz pro dolnı propust – dle rozlozenı na jednotkove kruznici platı p = 1, kde
p udava pocet propustnych pasem a K je konstanta – cım bude vetsı, tım uzsı budou
propustna pasma. Navıc je vhodne korigovat velke zvlnenı amplitudove charakteris-
tiky, tudız vysledny vztah nabyva tvaru [3]
Hdp(z) = H(z)H(z) =
(1− z−K
K(1− z−1)
)2
. (2.5)
Vysledna impulsnı charakteristika bude mıt tvar trojuhelnıku. K odvozenı hornı
propusti, ktera je pozadovana k odstranenı driftu je treba nasledne vyuzıt vztahu
[3]
Hhp(z) = z−τ −Hdp(z), (2.6)
cili musıme zavest zpozdenı τ , od ktereho budeme odecıtat signal, ktery prosel dolnı
propustı. Rekurzivnı zpusob navrhu ma nevyhodu, ze pri velkem zvolenem K muze
dochazet k zaokrouhlovacım chybam.
Brum Jak jiz bylo uvedeno, navrhy Lynnova filtru zavisı do znacne mıry na vzor-
kovacım kmitoctu. Signaly, ktere budou uzity v prakticke casti teto prace majı vzor-
kovacı kmitocet 500 Hz. Pro tento prıpad bude rozlozenı polu na jednotkove kruznici
nasledujıcı.
Jak je videt z obrazku 2.2, tento filtr bude propoustet resp. potlacovat pasma
v oblasti 50, 150 a 250 Hz a sve symetricke protejsky. Pri realizaci uzkopasmove
propusti resp. zadrze v matlabu vychazıme opet z obecneho vztahu, tentokrat pro
sude K, aby byly polynomy v prenosove funkci delitelne [3]
G(z) =1− z−pK
K(1 + z−p), (2.7)
kde p = 5 (mame 5 nepropustnych pasem) a K je sude cıslo. Opet je treba odstra-
nit prılisne zvlnenı amplitudove charakteristiky, tudız vyuzijeme dvou filtru v serii,
vysledny vztah bude mıt tvar [3]
13

Obr. 2.2: Rozlozenı polu realizovaneho Lynnova filtru, prevzato z [3]
Hpp(z) = G(z)G(z) =
(1− z−5K
K(1 + z−5)
)2
. (2.8)
Pozadavek na uvedeny typ filtru je, aby pomer fvz/50 byl cele cıslo, coz je pri
danem vzorkovacım kmitoctu splneno. Nynı je treba opet zavest zpozdenı [3]
Hpz(z) = z−τ −Hpp(z), (2.9)
dostavame tak vyslednou uzkopasmovou zadrz.
Nulovanı spektralnıch car
Metoda vychazı z principu vzorkovanı frekvencnı charakteristiky a lze ji povazovat za
idealnı, protoze se neuplatnı amplitudove zvlnenı a fazova charakteristika je nulova.
Nevyhodou je zpracovanı pouze offline, musıme vzıt vzdy cely signal – filtrace po
usecıch vede k nespojitostem.
Princip nulovanı spektralnıch car je znazornen na obrazku 2.3,
kdy vstupnı signal prevedeme pomocı DFT do spektralnı oblasti a zde spocıtame
vzdalenost jednotlivych spektralnıch car [3]
∆f =fvzN, (2.10)
kde N je delka signalu. Vzorky odpovıdajıcı frekvenci, kterou chceme potlacit vy-
nulujeme a nasledne provedeme IDFT.
14

Obr. 2.3: Filtrace nulovanım spektralnıch car, prevzato z [3]
Je treba si uvedomit, ze prvnı spektralnı cara odpovıda stejnosmerne slozce.
Stejne tak je treba brat v uvahu symetrii spektra – nulujeme komplexne sdruzene
vzorky. [3]
2.3 IIR filtry
Mezi zakladnı vlastnosti IIR filtru patrı nekonecna impulsnı charakteristika, ne-
linearnı fazova charakteristika, moznost nestability a rekurzivnı realizace. Z techto
vlastnostı lze usuzovat, ze vhodnejsı navrh k odstranenı rusenı, zejmena driftu, bude
pomocı filtru FIR. [6]
Butterworthuv filtr
K navrhu filtru lze vyuzıt matlabovskou funkci butter, kterou je mozne realizovat
podobnym zapisem jako funkci fir1, tedy [4]
[b, a] = butter(N,Wn,′ ftype′), (2.11)
kde N je opet rad filtru a Wn normovana frekvence v intervalu 〈0; 1〉, ’ftype’ je typ
pouziteho filtru, implicitne dolnı propust. Koeficienty [b, a] predstavujı citatel
resp. jmenovatel prenosove funkce. Tento filtr lze navrhnout jako analogovy proto-
typ (pridanım parametru s za typ pouziteho okna) a prıpadne prevest na digitalnı
protejsek bilinearnı transformacı. Nebo lze pouzıt navrh prımo v diskretnı oblasti
vyuzıvajıcı metody transformace frekvencnı charakteristiky. Tato metoda vychazı
15

z toho, ze pouzıva diskretnı vzor, obvykle typovou dolnı propust jejız obrazovy
prenos transformuje na obrazovy prenos napr. pasmove zadrze. Dale platı ze, pri re-
alizaci pasmove zadrze je rad filtru roven 2N. Pokud tedy zvolıme N=1, pak dostavame
filtr druheho radu. Filtr Butterworth ma maximalne plochou amplitudovou charak-
teristiku, ktera vychazı z jeho analogoveho protejsku a monotonnı prubeh. [4]
Drift Jak bylo jiz vyse uvedeno, zakladnı pozadavek na hornı propust k odstranenı
driftu je linearnı fazova charakteristika prochazejıcı nulou. V opacnem prıpade do-
jde k fazovemu zkreslenı signalu. Z vlastnostı IIR filtru plyne, ze tento pozadavek
nemuze byt splnen. IIR filtr je proto k odstranenı driftu zcela nevhodny. [3]
16

3 ADAPTIVNI FILTRACE
Adpativnım filtrem rozumıme filtr, ktery je schopen behem sve prace se v danem
prostredı ucit (zıskavat potrebne informace – odhady velicin). Typicke pouzitı adap-
tivnı filtrace je v prıpadech, kdy nenı mozna predbezna identifikace signalu – filtr
pracuje v neznamem prostredı (filtrace parazitnıho kmitoctu s casove stabilnımi, ale
neznamymi parametry) nebo pokud se jedna o prostredı, ktere je casove promenne
(v case se menıcı parametry). Dıky teto schopnosti vsak nastava nutnost pouzıt po-
mocny signal, ktery je nutne privest na vstup filtru (krome pozorovaneho signalu).
V zasade existujı dva prıstupy. Pokud je pomocnym signalem signal, ktery souvisı
s uzitecnym signalem, je optimalnım odhadem zadoucıho signalu vystupnı signal
filtru. Pokud je pomocnym signalem signal, ktery souvisı s rusenım, je optimalnım
odhadem zadoucıho signalu rozdılovy (chybovy) signal filtru. [1, 16]
3.1 Princip adaptivnıho filtru
Princip adaptivnıho filtru vychazı z nasledujıcıho schematu.
Obr. 3.1: Blokove schema adaptivnıho filtru, prevzato z [3]
Na vstup filtru se privadejı dva signaly, dle obr. 3.1 oznacene jako s a x, ktere jsou
vzajemne korelovany a dalsı signal r, ktery je na techto dvou signalech nezavisly.
Filtr pouzıva pro adaptaci algoritmus strednı kvadraticke chyby, kterou je treba
minimalizovat [3]
E{e2} → min. (3.1)
Minimalizace chyby je nutna proto, aby se nam signal y blızil vstupnımu signalu
s, tedy aby bylo mozne zıskat jeho odhad, tımpadem zıskame i odhad signalu r,
ktery bude odpovıdat chybovemu signalu e (y = s, e = r). Druha moznost je,
ze nekorelovany bude signal s, a korelovane budou signaly r a x, tehdy dojde ke
17

zmene. Signalu y bude odpovıdat odhad signalu r a chybovemu signalu e odhad
signalu s (y = r, e = s). Hledanı minima chyby je mozne provest pomocı gradientnı
metody, kde vystupuje operator gradientu. Minimu chyby odpovıda gradient, ktery
je vektorem nul a soucasne musı byt optimalnı vektor vah. Za operator gradientu
lze dosadit a zıskat tak vysledny vztah pro adaptaci vektoru vah [3]
wk+1 = wk − 2µe(k)xk, (3.2)
kde wk je vektor M vah v k-tem taktu a rychlost adaptace je urcena konstantou
µ. Cili pro kazdy vzorek, ktery projde systemem se spocıta chyba, ktera se vahuje
adaptacnım koeficientem. Delka impulsnı charakteristiky filtru FIR (vektor M) se
nastavuje tak, aby doslo k minimalizaci strednı kvadraticke chyby.
3.2 Adaptivnı filtr pro potlacenı sıt’oveho brumu
Pri uvahach lze vyjıt z obr. 3.1. Uzitecny signal s si lze predstavit jako EKG signal,
r bude sıt’ovy brum, kterym je EKG signal zarusen a signal x oznacme jako po-
mocny signal, ktery je korelovany s brumem a jehoz kmitocet se musı s kmitoctem
brumu shodovat. Tento signal muze byt napr. harmonicky. V tomto prıpade bude
optimalnım odhadem uzitecneho signalu chybovy signal, protoze doplnkovy signal x
privadeny na vstup adaptivnıho filtru souvisı s rusenım, nikoliv se signalem. Para-
metry, ktere lze zde volit jsou konstanta urcujıcı rychlost adaptace a delka impulsnı
charakteristiky. [3]
3.3 Adaptivnı filtr se dvema vahami
Adaptivnı filtr se dvema vahami lze popsat pomocı obr. 3.2.
Obr. 3.2: Blokove schema adaptivnıho filtru se dvema vahami, prevzato z [3]
Vychazıme z predpokladu, ze harmonicky signal lze vytvorit aditivnı smesı dvou
navzajem fazove posunutych harmonickych signalu o stejnem kmitoctu, kde posunutı
18

nesmı byt nasobkem π a idealnı je nasobek π/2. Rozdıl od predchozıho prıpadu
je tedy v tom, ze pomocny signal x je nynı prubeh funkce sinus a cosinus. Zde
volıme pouze parametr konstanty urcujıcı rychlost adaptace. A adaptace vektoru
vah nabyva tvaru [3]
wk+1(1) = wk(1)− 2µe(k)ck, (3.3)
wk+1(2) = wk(2)− 2µe(k)sk. (3.4)
19

4 PROGRAMOVA REALIZACE LINEARNICH
FILTRU
4.1 Odstranovanı sıt’oveho brumu
Aby bylo mozne korektnıho srovnanı jedotlivych metod, u vsech typu filtru je treba
volit stejne nepropustne frekvencnı pasmo. Pro porovnavanı linearnıch filtru bude
zvolena sırka pasma 2 Hz, tedy: 49− 51 Hz. Vyjimku bude tvorit metoda nulovanı
spektralnıch car, kterou lze povazovat za idealnı filtraci, zde bude odstranena pouze
spektralnı cara odpovıdajıcı 50 Hz a k nı symetricky protejsek. Vsechny uvedene
graficke vystupy odpovıdajı signalu s38 V 3.
Pomocı funkce fir1
Obr. 4.1: Amplitudova charakteristika
20

Obr. 4.2: Puvodnı signal, zasumeny signal, vyfiltrovany signal, chyba filtrace
Hodnocenı navrhu a uspesnosti filtrace
Navrch vychazı z delky impulsnı charakteristiky filtru N = 1000, ktera se jevı
jako vhodna ke zvolene sırce pasma 49 − 51Hz. Pocet koeficientu impulsnı ode-
zvy filtru rıdı jeho strmost. Pri teto delce impulsnı charakteristiky je dosazeno
nejmensı chyby filtrace. Pokud se budeN dale zvysovat, zvysı se vypocetnı narocnost
systemu a vznikne vetsı zpozdenı, ovsem chyba filtrace se uz nezmensı (odzkouseno
v programu). Obecne platı, cım uzpkopasmovejsı filtr chceme navrhnout, tım delsı
musı byt impulsnı charakteristika. Dale je treba odstranit zpozdenı, ktere je rovno
(N − 1)/2, kde N je delka impulsnı charakteristiky. O toto zpozdenı je treba take
zkratit originalnı signal, abychom meli stejny pocet vzorku a mohli oba signaly od
sebe odecıst. K potlacenı zvlnenı amplitudove charakteristiky je vyuzito Hammin-
gova okna. Z grafu je patrne, ze amplituda chyboveho signalu se pohybuje v intervalu
〈−18, 5; 18, 5〉 µV, viz obr. 4.2.
21

Pomocı Lynnova filtru
Obr. 4.3: Amplitudova a impulsnı charakteristika
Obr. 4.4: Rozlozenı nul a polu
22

Obr. 4.5: Puvodnı signal, zasumeny signal, vyfiltrovany signal, chyba filtrace
Hodnocenı navrhu a uspesnosti filtrace
K navrhu Lynnova filtru je vyuzita rekurzivnı realizace. Jak jiz bylo receno, Lynnuv
filtr do znacne mıry zavisı na vzorkovacı frekvenci signalu. Konstanta byla zvolena
K = 100 (podmınka sudeho cısla), p musı byt 5 viz obr. 2.2. Konstanta K = 100
je volena z duvodu pozadavku na nepropustne pasmo v rozmezı 49 − 51 Hz. Sırka
pasma je dle vzorce 2fvz/pK, po dosazenı tedy 2 Hz. Nizsıho amplitudoveho zvlnenı
je dosazeno zarazenım dvou filtru do serie, ktere se projevı trojuhelnıkovou impulsnı
charakteristikou a dvojnasobnymi nulami na kruznici – v programu reseno prıkazem
conv. Dıky zpozdenı, ktere je zavedeno, je u chyby filtrace videt pomerne velky
prechodovy jev filtru, ktery lze eliminovat vyssı hodnotou. Opet je treba zkratit jak
vysledny, tak originalnı signal o zavedene zpozdenı pro spravny odecet. Amplituda
chyboveho signalu se pohybuje v intervalu 〈−8, 9; 8, 9〉 µV, viz obr. 4.5.
23

Pomocı nulovanı spektralnıch car
Obr. 4.6: Spektrum pred a po nulovanı
24

Obr. 4.7: Puvodnı signal, zasumeny signal, vyfiltrovany signal, chyba filtrace
Hodnocenı navrhu a uspesnosti filtrace
Po presunu do spektralnı oblasti je dle vzorce spocıtana vzdalenost spektralnıch car
vzs = 0, 1 a nulovany vzorky, ktere odpovıdajı frekvenci 50 a 450 Hz, tedy z obou
stran symetrickeho spektra. Prvnı cara spektra odpovıda stejnosmerne slozce. Je
treba dbat na to, aby byla zachovana symetrie spektra. Uspesne odstranenı 50 Hz
resp. 450 Hz slozky je patrne z obr. 4.6 zmizenım obou pıku. Amplituda chyboveho
signalu se pohybuje v intervalu 〈−1, 5; 1, 5〉 µV, viz obr. 4.7.
25

Butterworthuv filtr
Obr. 4.8: Amplitudova a fazova charakteristika
26

Obr. 4.9: Rozlozenı nul a polu
Hodnocenı navrhu a uspesnosti filtrace
K filtraci je zvolen Butterworthuv filtr 2.radu. Na obr. 4.8 je videt nelinearnı faze.
Uspesnost filtrace nenı velka. Amplituda chyboveho signalu se pohybuje v intervalu
〈−67, 8; 56, 6〉 µV, viz obr. 4.9.
27
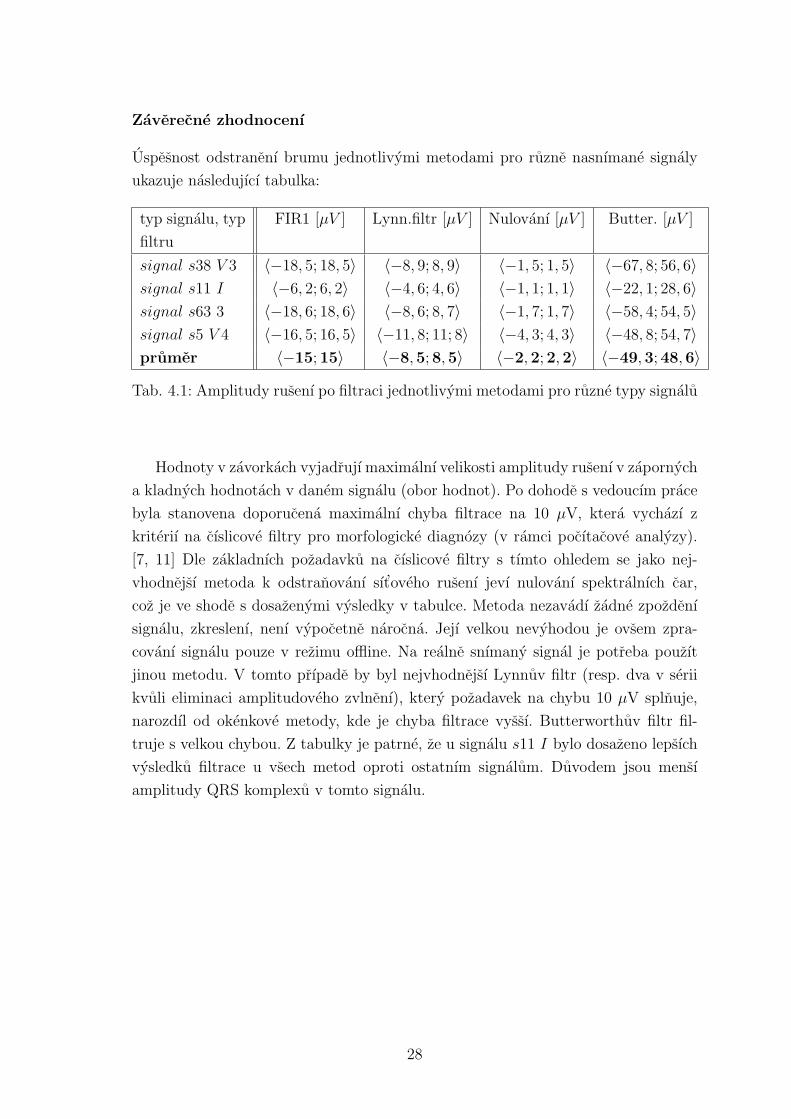
Zaverecne zhodnocenı
Uspesnost odstranenı brumu jednotlivymi metodami pro ruzne nasnımane signaly
ukazuje nasledujıcı tabulka:
typ signalu, typ
filtru
FIR1 [µV ] Lynn.filtr [µV ] Nulovanı [µV ] Butter. [µV ]
signal s38 V 3 〈−18, 5; 18, 5〉 〈−8, 9; 8, 9〉 〈−1, 5; 1, 5〉 〈−67, 8; 56, 6〉signal s11 I 〈−6, 2; 6, 2〉 〈−4, 6; 4, 6〉 〈−1, 1; 1, 1〉 〈−22, 1; 28, 6〉signal s63 3 〈−18, 6; 18, 6〉 〈−8, 6; 8, 7〉 〈−1, 7; 1, 7〉 〈−58, 4; 54, 5〉signal s5 V 4 〈−16, 5; 16, 5〉 〈−11, 8; 11; 8〉 〈−4, 3; 4, 3〉 〈−48, 8; 54, 7〉prumer 〈−15; 15〉 〈−8,5; 8,5〉 〈−2,2; 2,2〉 〈−49,3; 48,6〉
Tab. 4.1: Amplitudy rusenı po filtraci jednotlivymi metodami pro ruzne typy signalu
Hodnoty v zavorkach vyjadrujı maximalnı velikosti amplitudy rusenı v zapornych
a kladnych hodnotach v danem signalu (obor hodnot). Po dohode s vedoucım prace
byla stanovena doporucena maximalnı chyba filtrace na 10 µV, ktera vychazı z
kriteriı na cıslicove filtry pro morfologicke diagnozy (v ramci pocıtacove analyzy).
[7, 11] Dle zakladnıch pozadavku na cıslicove filtry s tımto ohledem se jako nej-
vhodnejsı metoda k odstranovanı sıt’oveho rusenı jevı nulovanı spektralnıch car,
coz je ve shode s dosazenymi vysledky v tabulce. Metoda nezavadı zadne zpozdenı
signalu, zkreslenı, nenı vypocetne narocna. Jejı velkou nevyhodou je ovsem zpra-
covanı signalu pouze v rezimu offline. Na realne snımany signal je potreba pouzıt
jinou metodu. V tomto prıpade by byl nejvhodnejsı Lynnuv filtr (resp. dva v serii
kvuli eliminaci amplitudoveho zvlnenı), ktery pozadavek na chybu 10 µV splnuje,
narozdıl od okenkove metody, kde je chyba filtrace vyssı. Butterworthuv filtr fil-
truje s velkou chybou. Z tabulky je patrne, ze u signalu s11 I bylo dosazeno lepsıch
vysledku filtrace u vsech metod oproti ostatnım signalum. Duvodem jsou mensı
amplitudy QRS komplexu v tomto signalu.
28

4.2 Odstranovanı driftu
Pri odstranovanı driftu bude hodnocenı zalozeno na vizualnı strance. Zadane signaly
jsou totiz jiz driftem zaruseny (brumem zaruseny nebyly), z cehoz vyplyva, ze nelze
zıskat chybu filtrace rozdılem zadaneho a filtrovaneho signalu tak, jako pri od-
stranovanı brumu. Meznı frekvence filtru bude nastavena jednotne u vsech typu
filtru pro vsechny signaly a to fm = 0, 67 Hz. Tato frekvence je doporucovana
pro zpracovanı signalu k odstranenı driftu (odpovıda minimalnı frekvenci srdecnı
cinnosti 40 tepu/min). Jiny prıstup, ktery lze volit, je sjednotit meznı frekvenci fil-
tru se strednı tepovou frekvencı v signalu, coz je vhodne zejmena v situacıch, kdy
se srdecnı cinnost zvysuje (zatezove testy). V techto prıpadech by mel byt tento
prıstup ucinnejsı k odstranenı rusenı. [11]
Dale na vybrane metode bude zhodnoceno, jak se filtrovany signal menı pri nizsı
nebo vyssı zvolene meznı frekvenci filtru nez je doporucovana. Vsechny filtry jsou
navrzeny jako hornı propusti. Vsechny uvedene graficke vystupy odpovıdajı signalu
s38 V 3.
Pomocı funkce fir1
Obr. 4.10: Amplitudova charakteristika
29

Obr. 4.11: Puvodnı signal a signal po filtraci metodou FIR1
Poznamka k navrhu filtrace
Meznı frekvence filtru fm = 0, 67 Hz, delka impulsnı charakteristiky N = 2000.
30

Pomocı Lynnova filtru
Obr. 4.12: Amplitudova a impuslnı charakteristika
Obr. 4.13: Rozlozenı nul a polu v z rovine
31

Obr. 4.14: Puvodni signal a signal po filtraci Lynnovym filtrem
Poznamka k navrhu filtrace
Pri odstranovanım driftu pomocı Lynnova filtru je zvolena konstanta K takova,
aby byl splnen pozadavek na meznı frekvenci fm = 0, 67 Hz. Dle vyse uvedene teorie
platı, ze: K = fvz/fm, kde vzorkovacı frekvence signalu je fvz = 500 Hz. Po dosazenı
a zaokrouhlenı: K = 746.
32

Pomocı nulovanı spektralnıch car
Obr. 4.15: Puvodnı signal a signal po nulovanı
Poznamka k navrhu filtrace
Jelikoz je treba realizovat hornı propust, nulujeme spektralnı cary od nuly az do vyse
zmınene frekvence fm = 0, 67 Hz. Spektrum je symetricke, tedy nulovanı probehne i
z druhe strany spektra. Prvnı cara spektra odpovıda stejnosmerne slozce. Vzdalenost
spektralnıch car je podıl vzorkovacı frekvence a delky signalu.
33

Filtr Butterworth
Obr. 4.16: Amplitudova a fazova charakteristika
34

Obr. 4.17: Puvodnı signal a signal po filtraci filtrem Butterworth
Poznamka k navrhu filtrace
Navrh pomocı funkce butter jako Butterworthuv filtr 2.radu. Meznı frekvence filtru
fm = 0, 67 Hz. Na obr. 4.16 je videt nelinearnı fazova charakteristika.
35

Zavislost meznı frekvence filtru na ucinnosti odstranenı driftu
Nynı otestujeme, jak se bude menit signal s38 V 3 v zavislosti na volbe fm po-
mocı metody nulovanı spektralnıch car. Na obr. 4.18 muzeme nasledne zhodnotit
uspesnost odstranenı driftu pri ruznych meznıch frekvencıch.
Obr. 4.18: Prubehy signalu pri ruznych meznıch frekvencıch filtru
Zeleny signal zobrazuje prubeh filtrovaneho signalu pri doporucovane meznı frek-
venci fm = 0, 67 Hz. Dıky pouzitı metody nulovanı spektralnıch car je mozne filtraci
s touto meznı frekvencı povazovat za vztaznou a porovnavat vuci nı nedostatky
ostatnıch signalu pri zmene meznı frekvence. Cerveny signal zobrazuje filtrovany
signal s meznı frekvencı filtru velmi nızkou fm = 0, 1 Hz. Predevsım na zacatku
a konci signalu jsou tyto zmeny patrne. Toto nızkofrekvencnı rusenı zasahuje i do
vyssıch frekvencı, nez-li 0,1 Hz, ktere nebyly ze signalu odstraneny, coz je v souladu
s teoretickymi predpoklady. Naopak pri extremne vysoke meznı frekvenci fm = 4
Hz lze na obrazku pozorovat (modry signal), ze dojde k tvarovemu zkreslenı signalu
a to zejmena v pomalych castech signalu (ST segmenty).
36

Zde je uvedena tabulka, ktera ukazuje, jak se pohybujı strednı tepove frekvence
u jednotlivych zadanych EKG signalu, ktere jsou k dispozici viz obr. 4.19. Pokud
by tedy byl k realizaci pouzit tento zpusob urcenı tepove frekvence, zmenı se meznı
frekvence filtru tak, aby odpovıdala strednı tepove frekvenci signalu. Tak napr. pro
signal s oznacenım s38 V 3 je tepova frekvence 1,1 Hz (pocet QRS komplexu / 10s
zaznamu) viz obr. 4.19. Takto lze postupovat i pri zpracovavanı signalu v rezimu
online. [3]
f [Hz] signal s38 V 3 signal s11 I signal s63 3 signal s5 V 4
tepova frekvence 1,1 1,5 0,9 1,7
Tab. 4.2: Tepove frekvence u jednotlivych signalu
Obr. 4.19: Prubehy zadanych signalu
37

Zaverecne zhodnocenı
Z vyse uvedne teorie vyplyva, ze k uspesne filtraci driftu je treba dosahnout linearnı
fazovou charakteristiku. Ze vsech ctyr pouzitych metod, tuto podmınku nesplnuje
pouze filtrace Butterworthovym filtrem, kde se vyskytuje nelinearnı faze. Pokud
bude meznı frekvence filtru vychazet z doporucovane frekvence, lze povazovat vsechny
zbyle metody za ucinne k potlacenı driftu. S jak velkou ucinnostı filtrujı bude
vychazet z jejich frekvencnıch charakteristik. Jak uz bylo receno pri odstranovanı
brumu tak i zde lze hovorit jako o nejlepsı metode, ktera bude s nejvetsı ucinnosti
potlacovat drift o metode nulovanı spektralnıch car, jejız frekvencnı charakteris-
tiku lze povazovat za idealnı. Ovsem tato metoda funguje pouze v rezimu offline.
Nynı si vezmeme tento ’idealnı prubeh’ za vztazny a porovname vuci nemu vysledky
okenkove metody pomocı funkce fir1 a Lynnoveho filtru.
Obr. 4.20: Porovnanı filtrovanych signalu ruznymi metodami
Pri detailnejsım zobrazenı obrazku je patrne, ze ve vetsine castech signalu, v ob-
lasti pomalych ST segmentu a vlny P, je prubeh signalu metodou fir1 stejny jako
Lynnoveho filtru. Ovsem prubeh vztazneho signalu je mırne posunuty (lepe srov-
nany). Tvarove zmeny vsak patrne nejsou. Z toho lze usuzovat, ze pri odstranovanı
38

driftu je okenkova metoda pomocı funkce fir1 srovnatelna s metodou Lynnoveho
filtru.
39

5 PROGRAMOVA REALIZACE ADAPTIVNICH
FILTRU
5.1 Odstranovanı sıt’oveho brumu
Pri navrhu je vyuzito dvou typu adaptivnıch filtru a opet se zjist’uje chyba filtrace.
Dale je zde reseno, jaky vliv ma kolısanı sıt’oveho kmitoctu na uspesnost filtrace
adaptivnıch filtru.
Pomocı adaptivnıho filtru (1)
Parametry, ktere zde majı vliv na uspesnost filtrace jsou delka impulsnı charakte-
ristiky a rychlost adaptace filtru. Tyto dva parametry se prımo ovlivnujı: cım delsı
impulsnı charakteristiku je zvolena, tım rychlejsı bude adaptace filtru. Ovsem cım
rychlejsı bude adaptace, tım vetsı bude chyba filtrace. Dalsı parametr, jehoz zmena
ovlivnuje filtraci, je amplituda pomocneho signalu, ktera bude ponechana pro dalsı
ucely konstantnı. Navıc limitujucım faktorem je zde pouze 10 sekundovy zaznam
EKG. Tudız pri navrhu techto parametru je bran ohled jednak na doporucenou
chybu filtrace, jako v prıpade linearnı filtrace a take na to, ze k dispozici je jen 10
sekund zaznamu. Nynı budeme menit delku impulsnı charakteristiky a umerne k
tomu rychlost adaptivnı filtrace. Vysledky ukazuje nasledujıcı tabulka.
delka impuls. char. [−] 5 50 500
rychlost adaptace [−] 4.10−9 4.10−10 4.10−11
chyba filtrace [µV] 〈−10, 4; 10, 1〉 〈−10, 5; 10, 1〉 〈−9, 5; 9, 1〉
Tab. 5.1: Delka impuslnı charakteristiky v zavislosti na rychlosti adaptace
Z uvedenych vysledku vyplyva, ze pokud vhodne prizpusobıme pomer delky im-
puslnı charakteristiky k rychlostı adaptace lze dosahnout velmi obdobnych vysledku
chyby filtrace. Tudız lze usuzovat, ze pri navrhu tohoto filtru nenı treba volit prılis
dlouhe impulsnı charakteristiky, ale stacı par vzorku. Doba ustalenı filtru je ve vsech
prıpadech priblizne 5,5 sekundy. Ovsem delsı impulsnı charakteristiky zavadejı vetsı
zpozdenı. Opet je vyuzit signal s38 V 3.
Nynı bude ponechana delka impulsnı charakteristiky M = 5. Menit se bude
rychlost adaptace a zjist’ovat chyba filtrace pri ruzne dobe ustalenı filtru. Takto se
bude postupovat nasledne i u druheho typu filtru, kvuli vzajemnemu srovnanı.
40

Obr. 5.1: Zasumeny signal, pomocny signal, odhad brumu, odhad signalu
Obr. 5.2: Chyba filtrace
41

Hodnocenı navrhu a uspesnosti filtrace
Vyse uvedene vystupy jsou realizovane pri M = 5 a µ = 2, 5.10−9. Ustalenı filtru
probehne priblizne za 8 sekund. Chyba filtrace je odectena az po tomto ustalenı.
Chyba filtrace se pohybuje v rozmezı 〈−7, 6; 6, 5〉 µV, viz obr. 5.2.
Navrh adaptivnıho filtru se dvema vahami (2)
Obr. 5.3: Zasumeny signal, odhad brumu, odhad signalu
42

Obr. 5.4: Chyba filtrace
Hodnocenı navrhu a uspesnosti filtrace
Vyse uvedene graficke vystupy opet odpovıdajı dobe ustalenı filtru priblizne 8 sekund.
Jako v predchozım prıpade je zde omezenı 10-ti sekundovym zaznamem. Rychlost
adaptace je zvolena µ = 6, 5.10−9. Po ustalenı filtru se chyba filtrace pohybuje v
intervalu 〈−4, 4; 4, 3〉 µV, viz obr. 5.4.
Zaverecne zhodnocenı obou metod
Nasledujıcı tabulka ukazuje chybu filtrace v zavislosti na dobe ustalenı filtru.
typ filtru, doba
ustalenı
2s 4s 6s 8s
Adapt. filtr.1 [µV] 〈−21, 3; 22, 7〉 〈−11, 4; 12, 4〉 〈−8, 5; 8, 1〉 〈−7, 6; 6, 5〉Adapt. filtr.2 [µV] 〈−17, 3; 18, 8〉 〈−12, 2; 13, 3〉 〈−5, 2; 5, 3〉 〈−4, 4; 4, 3〉
Tab. 5.2: Amplitudy rusenı po filtraci obema metodami pro ruzne doby ustalenı
Z tabulky je patrne, ze s delsı dobou ustalenı filtru klesa chyba filtrace pro oba
typy filtru. Rozdıl mezi obema filtry je 2 - 4 µV. Pokud by tyto vysledky byly
43

opet vztahovany na doporucenou chybu filtrace 10µV, lze konstatovat, ze k uspesne
filtraci postacuje doba ustalenı filtru 6 sekund. Nicmene jeste lepsıch vysledku je
dosazeno pri vyssı dobe ustalenı.
Nynı porovname uspesnost filtrace jednotlivych signalu. K realizaci je pouzito
parametru filtru odpovıdajıcıch ustalenı osmi sekund. Uspesnost odstranenı brumu
obema metodami pro ruzne nasnımane signaly je videt v nıze uvedene tabulce:
typ signalu, typ
filtru
adapt. filtr 1 [µV ] adapt. filtr 2 [µV ]
signal s38 V 3 〈−7, 6; 6, 5〉 〈−4, 4; 4, 3〉signal s11 I 〈−7, 4; 6, 7〉 〈−5, 2; 4, 8〉signal s63 3 〈−7, 9; 6, 0〉 〈−8, 4; 7, 4〉signal s5 V 4 〈−9, 0; 10, 3〉 〈−9, 5; 10, 9〉prumer 〈−7,8; 7,4〉 〈−6,9; 6,9〉
Tab. 5.3: Amplitudy rusenı po filtraci obema metodami pro ruzne typy signalu
Jak je patrne z tabulky, pro dva typy signalu s38 V 3 a s11 I byl uspesnejsı
adaptivnı filtr se dvema vahami, pro dalsı dva signaly prvnı typ filtru. Ovsem rozdıly
mezi chybami filtrace jsou zanedbatelne. Na zaklade toho zjistenı i dle predchozıch
vysledku a zaveru lze usuzovat, ze oba typy navrhu filtru davajı obdobne vysledky
a filtrujı s velmi podobnou uspesnostı.
44

5.2 Zavislost chyby filtrace na kolısanı sıt’oveho
kmitoctu
U obou filtru budou nastaveny parametry odpovıdajıcı dobe ustalenı napr. 6 sekund
a bude se menit pouze kmitocet sıte a sledovat jak se to projevı na chybe filtrace. Jako
prıklad obrazku je uvedena chyba filtrace adaptivnıho filtru 1 (realizace s jednım
pomocnym signalem) pri kmitoctu 49,99 Hz, viz obr. 5.5.
Obr. 5.5: Chyba filtrace u adaptivnıho filtru s jednım pomocnym signalem pri
kmitoctu 49,99 Hz
Jak se projevı chyba filtrace pri kolısanı sıt’oveho kmitoctu ukazuje nasledujıcı
tabulka:
typ filtru/amplituda [µV ] 49,99 Hz 50 Hz 50,01 Hz
adaptivnı filtr 1 〈−45, 3; 43, 2〉 〈−8, 5; 8, 1〉 〈−42, 9; 43, 2〉adaptivnı filtr se dvema vahami 〈−43, 5; 43, 3〉 〈−5, 2; 5, 3〉 〈−42, 8; 42, 7〉
Tab. 5.4: Amplitudy rusenı po filtraci pri zmenach kmitoctu
45

Jak je videt z nasledujıcı tabulky, filtry jsou na zmenu sıt’oveho kmitoctu extremne
citlive. Jiz pri zmene o jednu setinu Hz je uspesnost filtrace podstatne nizsı. Pokud
by se menil kmitocet dle normy, ktera popisuje jeho maximalnı kolısanı, tj. o 0,5 Hz,
filtr nebude sıt’ove rusenı odstranovat vubec. Z vysledku vyplyva, ze u obou filtru
se pri kolısanı o 0,01 Hz zvetsı chyba filtrace o desıtky µV. Tato skutecnost souvisı s
teoretickym vykladem navrhu techto filtru (popsaneho vyse), ktery rıka, ze kmitocet
brumu musı byti shodny s kmitoctem pomocneho signalu filtru. Coz v tomto prıpade
dodrzeno nenı. Tento problem by se dal vyresit napr. realizacı detektoru, ktery by
snımal kmitocet sıte, pri kolısanı by tuto zmenu zaznamenal a dle teto zmeny by se
automaticky upravil i kmitocet pomocneho signalu adaptivnıho filtru, tak aby byly
tyto kmitocty ve shode.
Srovnanı linearnı a adaptivnı filtrace
Kazdy prıstup navrhu ma sve vyhody a nevyhody. Tak napr. z hlediska citlivosti fil-
tru na kolısanı sıt’oveho kmitoctu jsou adaptivnı filtry extremne citlive na zmenu, coz
bylo vyse testovano, nicmene i zmena sıt’oveho kmitoctu u linearnıch uzkopasmovych
filtru vyrazne ovlivnuje chybu filtrace. Cım bude filtr uzkopasmovejsı, tım vıce bude
na tuto zmenu citlivejsı. Z hlediska pracnosti odezvy je overeno, ze adaptivnı filtry
lze navrhovat i s velmi kratkymi impulsnımi charakteristikami, z cehoz vyplyva, ze
budou mıt velmi dobrou odezvu. Linearnı filtry mohou mıt i nekolik tisıc vzorku
dlouhe impulsnı charakteristiky, cımz se odezva zpomaluje (je ovsem treba pozna-
menat, ze existujı i linearnı typy filtru s kratkymi imp. charakteristikami). Zasadnım
kriteriem k porovnanı bude ovsem testovana chyba filtrace pri rusenı brumem.
Doporucene chybe filtrace 10 µV vyhovujı pouze nıze uvedene typy filtru:
• Lynnuv filtr – testovano pri pouzite sırce nepropustneho pasma 49− 51 Hz
• metoda nulovanı spektralnıch car - nejvetsı ucinnost potlacenı brumu ze vsech
filtru (pri odstranovanı jedne spektralnı cary odpovıdajıcı 50 Hz), pouzitelnost
ovsem pouze v rezimu offline
• adaptivnı filtr 1 – pri dobe ustalenı alespon 6 sekund
• adaptivnı filtr se dvema vahami - srovnatelne vysledky s adapt. filtrem 1
46

ZAVER
Cılem prace bylo porovnat uspesnost filtrace uzkopasmoveho rusenı jednotlivymi
typy filtru. Pri odstranovanı brumu vychazı hodnocenı uspesnosti filtrace z pozadav-
ku na doporucenou chybu filtrace. Tento pozadavek je definovan z mezinarodnıch
doporucenı pro pocıtacovou analyzu signalu EKG a jeho hodnota je 10 µV . [11]
Odecet chyby filtrace probıhal po odeznenı vsech jevu, ktere by mohly negativne
ovlivnit jejı vysledek (prechodovy jev, doba ustalenı filtru). Metodou volby pro od-
stranenı brumu je metoda nulovanı spektralnıch car. Metoda dosahla nejlepsıho
potlacenı sumu, dle ocekavanych teoretickych predpokladu. Prumerna chyba filtrace
se pohybuje v oboru hodnot 〈−2, 2; 2, 2〉 µV , pri odstranenı jedne spektralnı cary
odpovıdajıcı 50 Hz. Pouzitı teto metody je ovsem omezeno pouze na rezim offline,
protoze potrebujeme predem znat cely signal. Na online zpracovavany signal se pri
dodrzenı doporucene chyby filtrace jevı jako vhodne Lynnovy filtry s prumernou chy-
bou pohybujıcı se v intervalu 〈−8, 5; 8, 5〉 µV pro testovanou sırku pasma 49 − 51
Hz, ci oba adaptivnı filtry s obdobnou chybou filtrace, ale s podmınkou dodrzenı
delsı doby ustalenı filtru. Okenkova metoda pomocı funkce fir1 ani s velmi dlou-
hou impulsnı charakteristikou (radove tisıce vzorku) a tez Butterworthuv filtr 2.radu
pozadavku 10 µV nevyhoveli.
Pri odstranovanı driftu bylo hodnocenı zalozeno na vizualnı strance. Meznı frek-
vence filtru zde vychazela opet z mezinarodnıch doporucenı, kde fm = 0, 67 Hz.
Tato frekvence odpovıda minimalnı frekvenci srdecnı cinnosti. [11] Aby bylo mozne
vhodneho srovnanı, nestacilo pouze zobrazit puvodnı a filtrovany signal danou me-
todou, z ktere se sice dalo vycıst, ze metoda funguje a kolısanı linie odstranuje,
ale nebylo mozne vzajemne porovnat ucinnost filtrace. Postup zde vychazel z me-
tody nulovanı spektralnıch car, ktera byla povazovana za vztaznou – jako ’idealnı’
filtrace (dle teoretickych predpokladu). Prubeh signalu zıskany touto metodou byl
prımo porovnan s prubehem filtrovaneho signalu z Lynnova filtru a okenkove me-
tody pomocı funkce fir1. Z tohoto srovnanı vyplynulo, ze obe zmınene metody
majı nepatrne posunute prubehy vuci tomuto vztaznemu signalu, zrejme zpusobene
nedokonale vyrovnanou izoelektrickou liniı. Z hlediska srovnanı obou metod mezi se-
bou je ve vetsine castech signalu temer identicky prubeh jejich filtrovanych signalu.
Ucelem prımeho porovnanı bylo take posouzenı tvarovych zmen v signalu, ktere
ovsem nejsou u techto metod patrne. Oba typy filtru by mohly byt pri dodrzenı
zakladnıch pozadavku k odstranovanı driftu vhodne. Butterworthuv filtr ma ne-
linearnı fazovou charakteristiku, tudız je k odstranenı driftu zcela nevhodny. Do
srovnanı nebyl zarazen, protoze zkreslenı v pomalych castech signalu, je patrne
ihned pri porovnanı vstupnıho signalu se signalem vystupujıcım z tohoto filtru.
47

LITERATURA
[1] Jan, J., Cıslicova filtrace, analyza a restaurace signalu, VUT v Brne, nakl. VU-
TIUM, Brno, 2002.
[2] Kozumplık, J., Kolar, R., Jan, J., Cıslicove zpracovanı signalu v prostredı Matlab,
Skripta FEKT VUT v Brne, 2001.
[3] Kozumplık, J., Analyza biologickych signalu, Skripta FEKT VUT v Brne, 2008.
[4] The MathWorks: Signal Processing Toolbox [online] Aktualizovano: version
6.12 (R2009b) [cit. 2009-10-11].
Dostupne z URL: <http://www.mathworks.com/>
[5] Kozumplık, J., Prednasky z predmetu AABS, FEKT VUT v Brne, 2009.
[6] Vıtek, M., Materialy ke cvicenı z predmetu AZSO, FEKT VUT v Brne, 2008.
[7] AHA Scientific council, Recommendations in Electrocardiography, American
Heart Association, Texas, 1990.
[8] Biorezonancnı terapie Zesilovac biosignalu [online] Aktualizovano: ? [cit.
2009-10-11].
Dostupne z URL: <http://www.biorezonancniterapie.cz/>
[9] Skupina CEZ Regulacnı plan - stavy nouze [online] Aktualizovano: 2010 [cit.
2010-29-03].
Dostupne z URL: <http://www.cez.cz/cs/>
[10] E.ON Parametry elektriny [online] Aktualizovano: 2010 [cit. 2010-29-03].
Dostupne z URL: <http://www.eon.cz/cs/info/parameters.shtml>
[11] Svarovsky, J., Pavlis, P., filtrace EKG [online] Aktualizovano: 2007 [cit.
2010-21-04].
Dostupne z URL: <http://www.cvut.cz/>
[12] Rozman, J. a kol., Elektronicke prıstroje v lekarstvı, Academia, Praha 2006.
[13] RYBICKA Jirı, LATEXpro zacatecnıky Konvoj, 2003. 238 s. ISBN 80-7302-049-1
[14] Penguin.cz: Ne prılis strucny uvod do systemu LATEX2ε [online][cit. 2009-16-11].
Dostupne z URL: <http://www.penguin.cz/>
[15] Zaplatılek, K., Donar, B., MATLAB - zacıname se signaly, nakl. Ben, Praha,
2006.
48

[16] Huptych, M.,Chudacek, V., Predzpracovanı a analyza biosignalu [online]
Aktualizovano: ? [cit. 2010-19-04].
Dostupne z URL: <http://www.cittadella.cz/euromise/>
49

A PRILOHA, OBSAH PRILOZENEHO CD
Obsah prilozeneho cd:
Nazev adresare Popis
Zdrojove kody Jednotlive navrhy filtru
Obrazky Graficke vystupy filtru
Texty Bakalarska prace v elektro-
nicke podobe
50