Embed Size (px)
Citation preview

WAVE FORCES ON BRIDGES
By
Mary-Margaret Dickey
A Thesis Submitted to the Faculty of Mississippi State University
in Partial Fulfillment of the Requirements for the Degree of Masters of Science
in Civil and Environmental Engineering in the Department of Civil and Environmental Engineering
Mississippi State, Mississippi
December 2008

Copyright by
Mary-Margaret Dickey
2008
WAVE FORCES ON BRIDGES
By
Mary-Margaret Dickey
Approved:
Philip M. Gullett William H. McAnally Assistant Professor of Civil and Associate Professor of Civil and Environmental Engineering Environmental Engineering (Director of Thesis) (Committee Member)
R. Ralph Sinno James L. Martin Professor of Civil and Environmental Professor and Graduate Coordinator of Engineering Civil and Environmental Engineering (Committee Member)
Sarah A. Rajala Dean of Bagley College of Engineering
Name: Mary-Margaret Dickey
Date of Degree: December 12, 2008
Institution: Mississippi State University
Major Field: Civil and Environmental Engineering
Major Professor: Dr. Philip M. Gullett
Title of Study: WAVE FORCES ON BRIDGES
Pages of Study: 76
Candidate for Degree of Master of Science
From this review, a FORTRAN code was developed that generates time and
position dependant distributed loads based on linear wave theory for shallow water
conditions. The routine was integrated into to the Abaqus finite element analysis
framework, and used to evaluate the structural response of a representative bridge section
impacted by tidal surge.
TABLE OF CONTENTS
Page
LIST OF TABLES............................................................................................................. iv
LIST OF FIGURES .............................................................................................................v
CHAPTER
I. INTRODUCTION ................................................................................................1
Background...........................................................................................................1 Objectives & Tasks ...............................................................................................2 Scope.....................................................................................................................5
II. LITERATURE REVIEW .....................................................................................6
Denson ..................................................................................................................6 Wave Forces on Causeway-Type Coastal Bridges........................................6 Wave Forces on Causeway-Type Coastal Bridge: Effects of Angle of
Wave Incidence and Cross-Section Shape................................................7 Pressures on Coastal Bridges Due to Normal Incidence Waves ...................8
Morison, et al. .......................................................................................................9 Bea, et al..............................................................................................................10 Douglass, et al.....................................................................................................11 McConnell, et al..................................................................................................13
III. USER SUBROUTINE........................................................................................16
Introduction.........................................................................................................16 Standard Abaqus .................................................................................................17
Input File .....................................................................................................17 Common.h ...................................................................................................18 DLOAD .......................................................................................................19 UEXTERNALDB .......................................................................................19
Specialized Abaqus.............................................................................................20 Element.dat..................................................................................................20
Wave Force Subroutine.......................................................................................21 Surface Forces- Horizontal and Vertical .....................................................22 Buoyancy.....................................................................................................24
ii
Page
Wave Force Check..............................................................................................28
IV. NUMERICAL SIMULATION...........................................................................29
Introduction.........................................................................................................29 Model ..................................................................................................................30
Simple Block ...............................................................................................31 Geometry..............................................................................................31 Material Properties...............................................................................32 Boundary Conditions ...........................................................................33
Load .....................................................................................................33 Bridge Deck.................................................................................................34
Geometry..............................................................................................34 Material Properties...............................................................................35 Boundary Conditions ...........................................................................36
Load .....................................................................................................37 Response of Structure .........................................................................................38
Simple Block ...............................................................................................38 Bridge Deck.................................................................................................39
V. CONCLUSIONS.................................................................................................42
REFERENCES ..................................................................................................................44
APPENDIX
A. USER SUBROUTINES......................................................................................46
B. SIMPLE BLOCK EXAMPLE............................................................................54
C. FIXED BRIDGE EXAMPLE.............................................................................60
D. SIMPLY-SUPPORTED BRIDGE EXAMPLE..................................................62
E. ABAQUS TUTORIAL .......................................................................................64
F. ABAQUS/WAVE FORCE STEPS.....................................................................75
iii
LIST OF TABLES
TABLE Page
2.1 Douglass Force Estimates from Literature for Case Study: Biloxi Bay August 29, 2005 at 8:00 am .................................................................12
3.1 Coefficients .........................................................................................................23
3.2 Wave Characteristics ..........................................................................................24
3.3 Scale Factors for Buoyancy ................................................................................26
3.4 Wave Force Check Results .................................................................................28
4.1 Wave Characteristics for Simple Block..............................................................38
iv

LIST OF FIGURES
FIGURE Page
1.1 Biloxi Bay Bridge (Looking West)..........................................................................3
1.2 Biloxi Bay Bridge (Looking East) ...........................................................................4
2.1 Definition of Force Parameters (McConnell et al. 2003) ......................................14
3.1 Abaqus Analysis with Wave Force Schematic ......................................................17
3.2 Element.dat Format and Explanation.....................................................................21
3.3 Wave Profile (Kerenyi 2005).................................................................................25
3.4 The Cases for Buoyancy ........................................................................................27
4.1 Simple Block..........................................................................................................32
4.2 Stress-Strain Curve of Concrete.............................................................................33
4.3 Bridge Model’s Cross-section................................................................................34
4.4 Girder Cross-section ..............................................................................................35
4.5 Bridge Abaqus Solid Model...................................................................................37
4.6 Fixed Bridge Model ...............................................................................................40
4.7 Simply-Supported Bridge Model at T=3.0 s..........................................................41
4.8 Simply-Supported Bridge at T=6.0 s .....................................................................41
v
CHAPTER I
INTRODUCTION
Background
A bridge is a structure built to span a gorge, valley, road, railroad track, river,
body of water, or any other physical obstacle (Wikipedia March 1, 2008). Bridges are
designed to carry many different types of loads. Foremost, they are designed for
vehicular loading and gravity. Then, depending on their location, they are designed for
loads caused by water, wind, ice, and earthquakes.
Low-lying bridges along coastlines may be subject to loading from waves and
surge. The American Association of State Highway and Transportation Officials
(AASHTO) Load Resistance Factor Design (LRFD) Bridge Design Specifications gives
this guidance: “Wave action on bridge structures shall be considered for exposed
structures where the development of significant wave forces may occur” (AASHTO
2006). It references the Shore Protection Manual for computing the wave forces given
the site-specific conditions. This manual provides guidelines for computing forces
created by waves on pilings and walls but gives no aid for bridge’s superstructure.
Moreover the manual is intended for users with a background in ocean mechanics and
much of the content is unfamiliar to structural engineers designing bridge road way
structures. There are current design codes for coastal structures which give a guideline
1
for forces; however, Yim characterizes these approaches as “often grossly simplified and
may be overly conservation [sic] and/or unreliable.(Yim 2005)”
Due to the lack of design guidelines for wave forces many bridge road way
structures have been severely damaged or destroyed. In 1969, Hurricane Camille
damaged the Biloxi Bay and the Bay St. Louis bridges. In 1979, Hurricane Frederic
caused the Dauphin Island Causeway to fail. In 2004, Hurricane Ivan removed several
sections of the I-10 Escambia Bay Bridge from its pilings. In 2005, Hurricane Katrina
damaged the US Hwy 90 Biloxi Bay and Bay St. Louis bridges beyond repair along with
damage to the I-10 Lake Pontchartrain and Mobile Bay bridges. The loss of these bridges
after Hurricane Katrina resulted in major disruptions in transportation, making it difficult
for emergency assistance and rescue to coordinate without undo delays. It is estimated to
have taken three hundred and thirty-eight million dollars to replace the Biloxi Bay Bridge
(Bergeron 2007). The lost of this bridge only added to the lengthy economical recovery.
To prevent these disruptions and costs, design guidance for coastal bridges is needed-
whether retrofitting for existing bridges or designing future bridges. Just as water, wind,
ice, and earthquakes have design specifications there should also be a design
specification for wave loads due to water surge in a hurricane.
Biloxi Bay Bridge is located along one of the two main east-west corridors for
Mississippi’s gulf coast, U.S. Hwy. 90, connecting Biloxi to Ocean Springs. Before
Hurricane Katrina halted it’s use, traffic counts were approximately 30,000 average daily
traffic, ADT, annually (MDOT 2006). Surrounding most of the bridge, the water depth is
very shallow, 2’ to 3’, except for the shipping channel, 11’ to 12’(Douglass et al. 2006).
The superstructure of the bridge was made up of prestressed concrete girders with a cast-
2
in-place reinforced concrete deck, with each section being 52’ by 33.4’. The bridge was
simply supported by pile caps on either end. Between the girders and the pile caps were
bearing pads that provided no resistance to uplift.
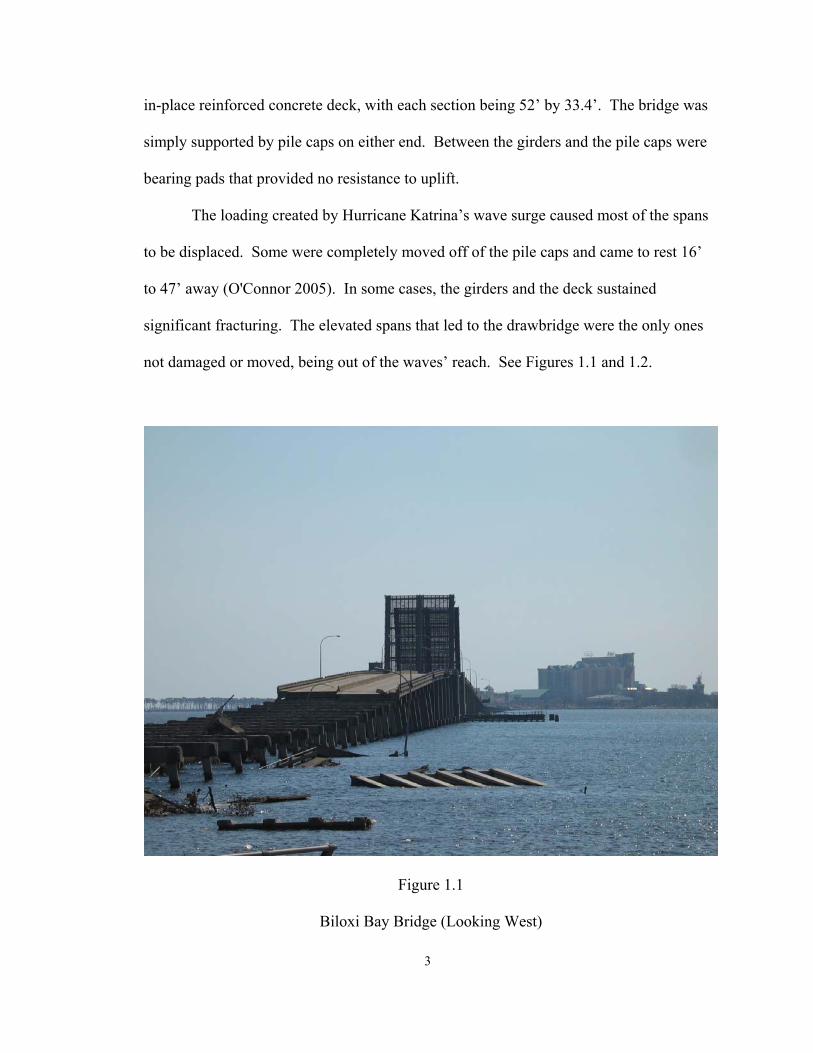
The loading created by Hurricane Katrina’s wave surge caused most of the spans
to be displaced. Some were completely moved off of the pile caps and came to rest 16’
to 47’ away (O'Connor 2005). In some cases, the girders and the deck sustained
significant fracturing. The elevated spans that led to the drawbridge were the only ones
not damaged or moved, being out of the waves’ reach. See Figures 1.1 and 1.2.
Figure 1.1
Biloxi Bay Bridge (Looking West)
3
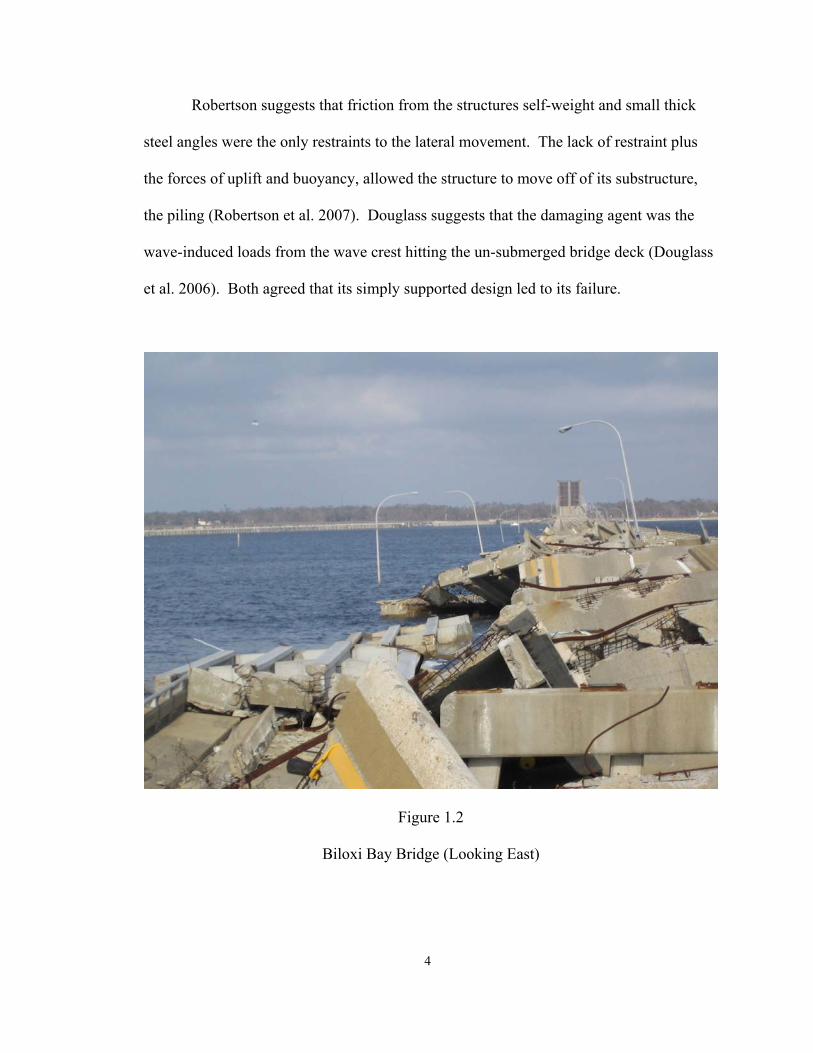
Robertson suggests that friction from the structures self-weight and small thick
steel angles were the only restraints to the lateral movement. The lack of restraint plus
the forces of uplift and buoyancy, allowed the structure to move off of its substructure,
the piling (Robertson et al. 2007). Douglass suggests that the damaging agent was the
wave-induced loads from the wave crest hitting the un-submerged bridge deck (Douglass
et al. 2006). Both agreed that its simply supported design led to its failure.
Figure 1.2
Biloxi Bay Bridge (Looking East)
4
Objectives & Tasks
The purpose of this study is to make [a first order approximation of the structural
response of a bridge deck subjected to a normal incidence wave.] The tasks to
accomplish are as follows:
1. Formulate FORTRAN code for wave force calculation.
2. Determine appropriate coefficients and wave characteristics.
3. Develop model of a bridge: fixed and simply supported.
4. Interface code and model.
5. Compare results with damage of U.S. Hwy 90 Biloxi Bay Bridge.
6. Make Recommendations
Scope
This study consists of developing a finite element model of a simple support and
fixed bridge sections and applying wave loads to the section in order to better understand
bridge-wave interaction. The bridge section is representative of the Biloxi Bay Bridge
with some simplifications which will be discussed in Chapter 3.
Abaqus/Standard was selected using DLOAD subroutine for wave force
calculation. The wave force calculation was based on Morison’s equation (Kerenyi 2005;
Morison et al. 1950) using linear wave theory to calculate the water particle velocities.
The subroutine does not take into account wind, debris, scour, or trapped air. In the
analysis, the wave force loading will vary with time, so that the full picture of the
bridge’s reaction to the wave will be generated.
5
CHAPTER II
LITERATURE REVIEW
The body of knowledge on calculating wave forces on offshore structures is vast
and spans about five decades. However, the available guidance for wave forces on bridge
roadway structures is limited. Moreover, there is still a large gap in how to apply these
forces to the superstructure of the bridge. The following is review of what has been done
so far to calculate wave forces.
Denson
In response to the damage of Bay St. Louis and Biloxi Bay Bridges by Hurricane
Camille in 1969, Keith Denson a research engineer with Water Resources Research
Institute at Mississippi State University (MSU) launched a research project to give
guidance for designing bridges to withstand the loads created by surge events. The
following is a review of the three reports that encompass his research:
Wave Forces on Causeway-Type Coastal Bridges
The main purpose for the report was to determine the magnitudes of forces, lift
and drag, in transverse and longitudinal directions, as well as the rolling moment,
produced by a wave hitting a bridge, so that design guidance for anchoring the deck to
the piles could be formulated. The research was carried out at MSU where a scale model
6
of a bridge section was placed in a wave basin and shallow water conditions were
assumed. This report only looks at waves that are normal to the bridge. The wave basin
generated waves with period of three sec, which was large enough so that the each
wave’s effects could be treated independently. The period also represents the
undistributed period of the wave. A water depth and clearance between the bottom of the
model and surface water elevation, SWE, was set, and then trials were run by changing
the wave height. The forces were measured by equipping the deck with electrical
resistance strain gages. The water depth and clearance were then changed and the trail
run again. From the data, dimensionless charts were generated where Height/Depth is the
x-axis and F/γW2 or M/γW2 is the y-axis, where F is the drag or lift force, γ is the specific
weight of water, W is the width of bridge, and M is the rolling moment. A “least of
squares” method was used to generate a third order polynomial to fit the data. These
curves were meant to supply a designer-given a wave height and water depth-the forces
and moments that the structure would need to withstand.
Wave Forces on Causeway-Type Coastal Bridges: Effects of Angle of Wave
Incidence and Cross-Section Shape
The next report is a continuation of Wave Forces on Causeway-Type Coastal
Bridges. Instead of investigating only at normal incidence waves, this report looks at
incidence waves of thirty- to ninety- degrees. Oblique incidence waves created moments
in the y and z direction, pitching and yawing respectively. The data were collected and
analyzed in the same manner and the dimensionless curves were generated. From this
7
research, Denson determined that normal incidence waves created the most severe
conditions for the bridge.
Pressures on Coastal Bridges Due to Normal Incidence Waves
From his previous report, Denson choose to determine the pressures created by
the critical angle of incidence, ninety-degrees. Here, pressures were measured at five
discrete points along the width of the scale bridge (perpendicular to flow of traffic and
parallel to wave action) also varying wave height and depth. Then the data were
examined and the peak negative and positive pressures were isolated since the time
between them was “so short as to be practically indiscernible”(Denson 1981). Then, it
was put into dimensionless form by the function p/GH, where p is water pressure
measured at the underside of the deck, G is specific weight of water, H is wave height. It
was put into dimensionless form to “normalize the pressure with respect to wave height
in order to possible [sic] obtain a more general relationship”(Denson 1981). Denson
observed that pressure was a linear function of wave height. Also that the wave produced
a positive uplift, from the crest’s passing, followed by a down-pull (suction), from the
trough’s passing. Denson observed overwash of the seaward lane. Overwash is when
part of the wave splashes over the bridge. He determined overwash to be a function of
bridge height to water depth ratio. Denson believed that a combination of loading from
overwash and pressure should be used to determine maximum loading. He intended that
the dimensionless data be used to design bridges for this maximum loads. Again he
created curves that were the dimensionless function vs. location of the electrical
resistance strain grains to bridge width ratio, with these tables the design engineer could
8
enter the curves with the appropriate line (H/D) and pick out the peak positive and
negative p/GH and the multiply by G and H to get the pressure for the prototype.
However, these curves are not clear enough-- it is hard to tell the H/D lines apart.
There are some issues with these reports that have kept them from being used as a
design tool. First, the curves are cumbersome to use because of their dimensionless form.
Second, the research is only relative for bridges with the same cross-section. Third,
buoyancy and the overwash force are not addressed in the research. Douglass, et al.
suggest that the wave period Denson used were not realistic for Biloxi Bay during a
hurricane (Douglass et al. 2006). However, it is the only completed work for measuring
forces on a bridge section.
Morison, et al.
Morison derived wave forces equations by using linear wave theory and
transitional water depth that were applicable to pilings. The equations were verified by
an experimental study. He determined that there were two components of the force: “a
drag force proportional to the square of the velocity which may be represented by a drag
coefficient having substantially the same value as for the steady flow” and “a virtual mass
force proportional to the horizontal component of the accelerative force exerted on the
mass of water displaced by the pile” (Morison et al. 1950). However, Morison cautioned
that these results were applicable to only single piles.
9
Bea, et al.
Bea, et al. research dealt with modifying the American Petroleum Institute (API)
Supplement 1 guidelines for computing the maximum horizontal forces generated by
wave crests for offshore oil platforms. The research was based on laboratory test model
results and by platforms performance during past hurricanes. Bea formulates the total
force (Ftw) from a wave crests impact as follows:
Ftw = Fb + Fs + Fd + Fl + Fi (2.1)
Where, Fb is buoyancy force, Fs is the slamming force, Fd is the drag force, Fl is lift force
and Fi is the inertia force. Bea uses the Morison formulation to calculate the deck forces.
The slamming force is:
Fs = 0.5ρCs Au2 (2.2)
Where, Cs is the slamming coefficient, ρ is the mass density of seawater, A is the vertical
deck area and u is the horizontal fluid velocity. The drag force is given by:
Fd = 0.5ρCd Au2 (2.3)
Where, Cd is the drag coefficient. The vertical lift force is given by:
Fl = 0.5ρCl Au2 (2.4)
Where, Cl is lifting coefficient. The inertial force is given by:
Fi = ρCmVa (2.5)
Where, Cm is the inertia coefficient, V is the volume of the deck submerged and a is the
water acceleration. Bea account for the platform deck’s response with an “effective”
slamming force that is given by:
10
Fs ' = FeFs (2.6)
Where Fe is a dynamic loading factor and Fs is given as above.
Bea used Stokes fifth order theory to calculate the velocities - given a wave height
and wave period. The work is empirically based. Bea concluded that the modified
procedure produced results that represented the failures seen in the field better than the
API procedure, which produced very conservative results. API “predicts failures when
only minor damage or no damage was observed.” (Bea et al. 1999)
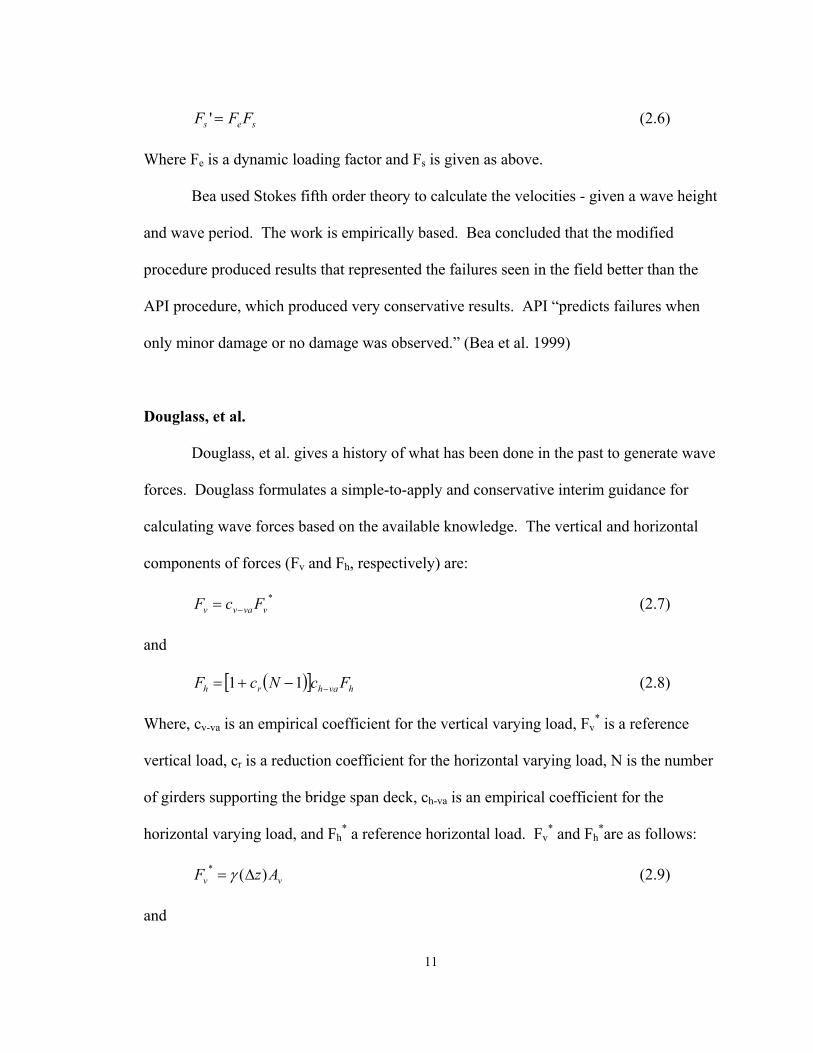
Douglass, et al.
Douglass, et al. gives a history of what has been done in the past to generate wave
forces. Douglass formulates a simple-to-apply and conservative interim guidance for
calculating wave forces based on the available knowledge. The vertical and horizontal
components of forces (Fv and Fh, respectively) are:
F = c F * (2.7)v v−va v
and
Fh = [1+ cr (N −1)]ch−va Fh (2.8)
Where, cv-va is an empirical coefficient for the vertical varying load, Fv* is a reference
vertical load, cr is a reduction coefficient for the horizontal varying load, N is the number
of girders supporting the bridge span deck, ch-va is an empirical coefficient for the
horizontal varying load, and Fh* a reference horizontal load. Fv
* and Fh*are as follows:
Fv * = γ (∆z)Av (2.9)
and
11
Fh * = γ (∆z)Ah (2.10)
Where, γ is the unit weight of water, Av and Ah are the areas of the bridge projection into
the horizontal/vertical plane, ∆zv is difference between the elevation of the crest of the
maximum wave and the elevation of the underside of the bridge deck, ∆zh difference
between the elevation of the crest of the maximum wave and the elevation of the centroid
of Ah.
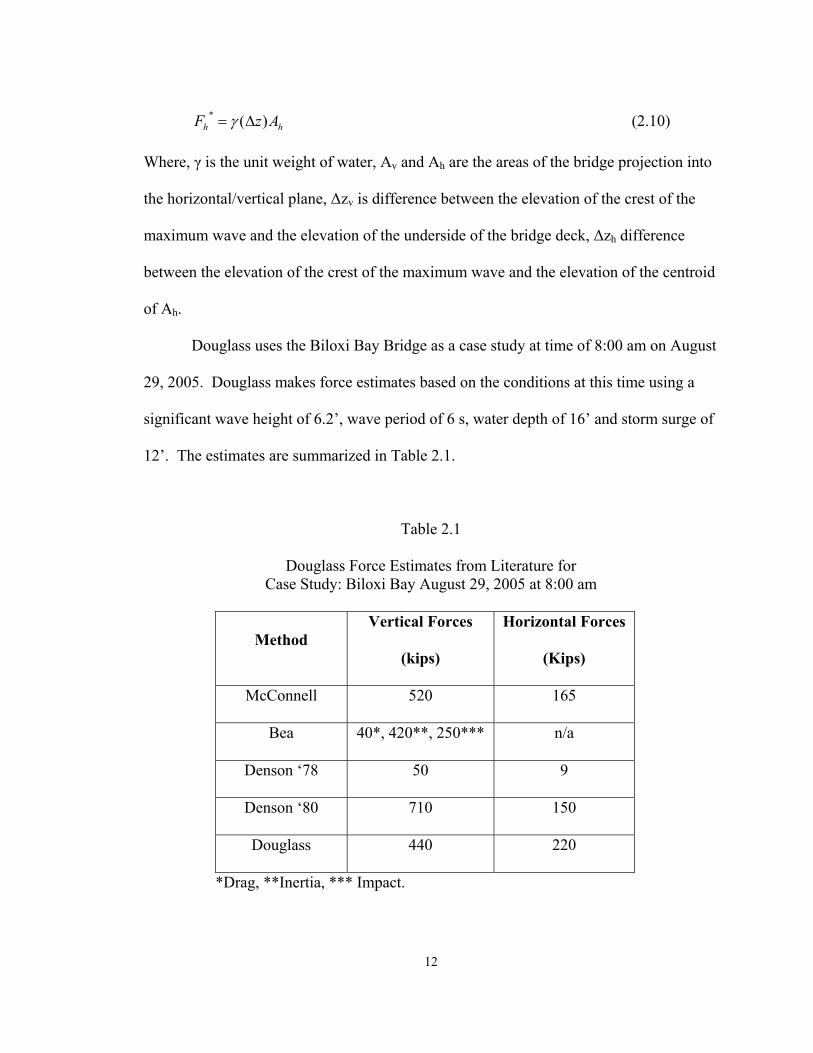
Douglass uses the Biloxi Bay Bridge as a case study at time of 8:00 am on August
29, 2005. Douglass makes force estimates based on the conditions at this time using a
significant wave height of 6.2’, wave period of 6 s, water depth of 16’ and storm surge of
12’. The estimates are summarized in Table 2.1.
Table 2.1
Douglass Force Estimates from Literature for Case Study: Biloxi Bay August 29, 2005 at 8:00 am
Method Vertical Forces
(kips)
Horizontal Forces
(Kips)
McConnell 520 165
Bea 40*, 420**, 250*** n/a
Denson ‘78 50 9
Denson ‘80 710 150
Douglass 440 220
*Drag, **Inertia, *** Impact.
12
Douglass chose this as the case study because it had the most reliable results,
unlike choosing the worst case when the bridge was submerged. Douglass suggests that
the values above account for the damage seen at Biloxi Bay Bridge, given its self-weight
was 340 kips. He concludes that the trapping of air added to its buoyancy. Douglass also
describes the vertical loading as slowly varying force able to move the spans in the down-
wave direction. However, not addressed in Douglass’s research is a method for applying
the interim guidance loads onto the bridge superstructure.
McConnell, et al.
HR Wallingford undertook the exposed jetties research project due to the need of
the trade industry to be able to build jetties in exposed locations without breakwater
protection. This research encompassed performing model tests of a scaled deck with and
without beams. The model was placed in a wave flume that was capable of creating
random waves. The model was also fitted with four force transducers to record force
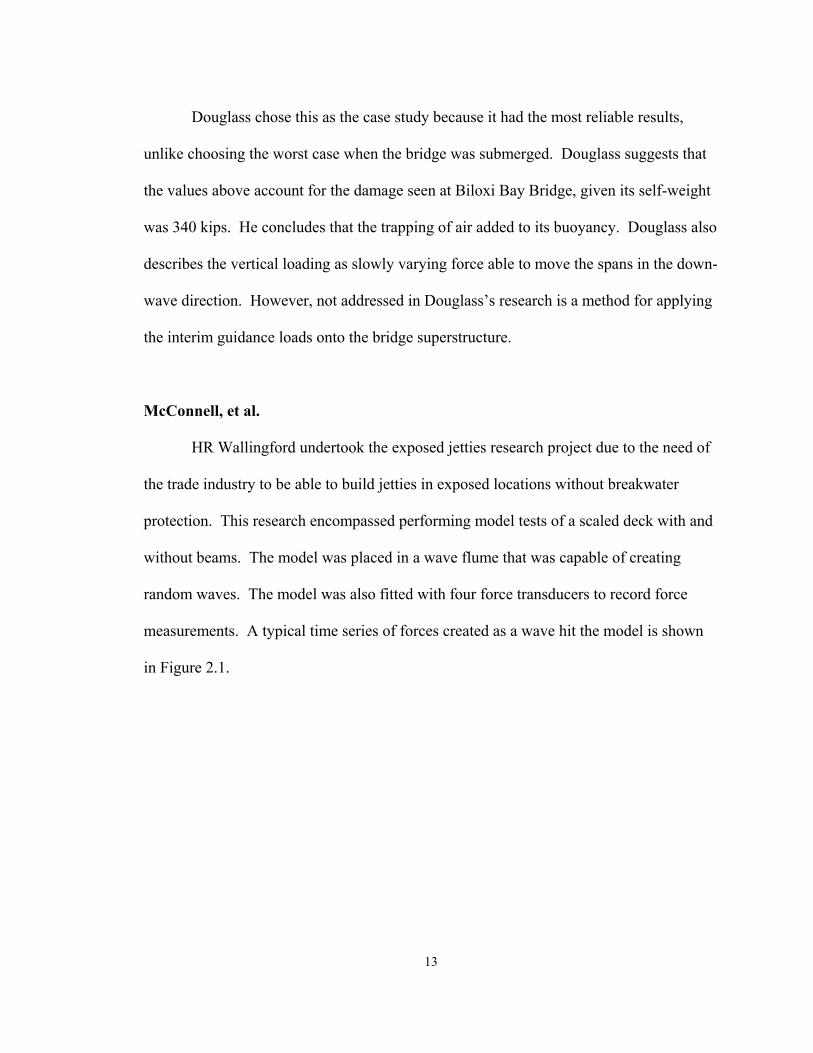
measurements. A typical time series of forces created as a wave hit the model is shown
in Figure 2.1.
13
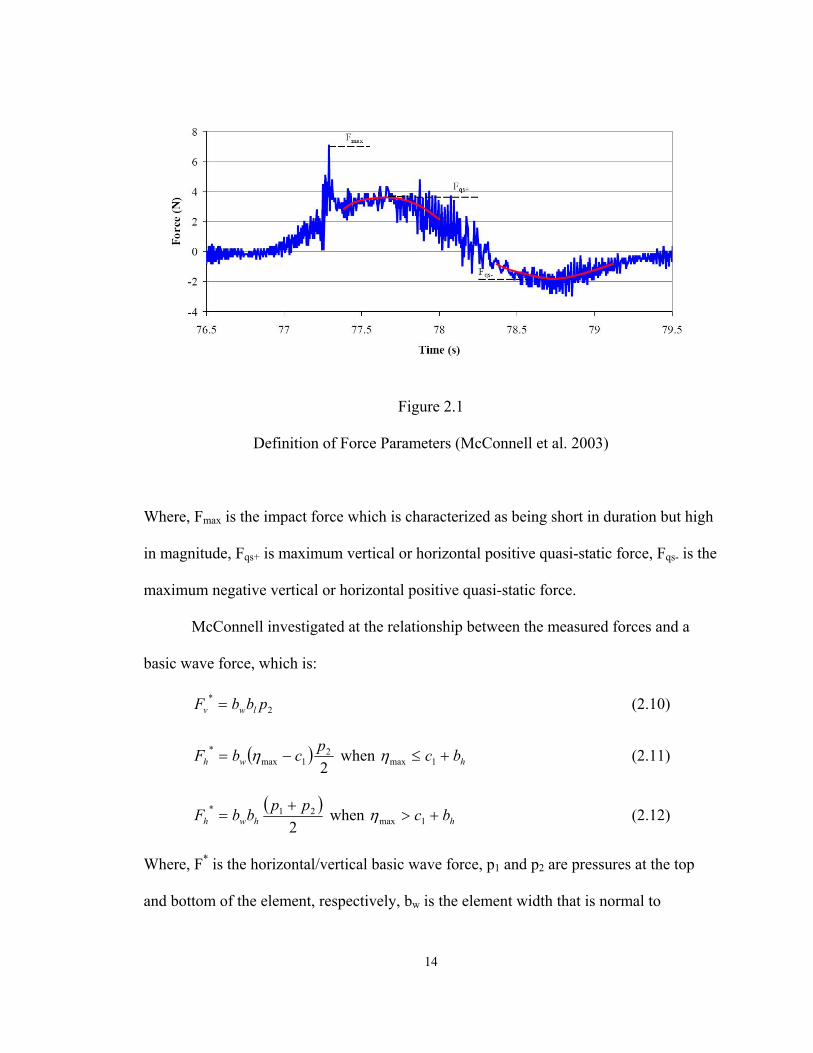
Figure 2.1
Definition of Force Parameters (McConnell et al. 2003)
Where, Fmax is the impact force which is characterized as being short in duration but high
in magnitude, Fqs+ is maximum vertical or horizontal positive quasi-static force, Fqs- is the
maximum negative vertical or horizontal positive quasi-static force.
McConnell investigated at the relationship between the measured forces and a
basic wave force, which is:
F * = b b p (2.10)v w l 2
Fh * = bw (ηmax − c1 )
p2 when ηmax ≤ c1 + bh (2.11)2
(p + p )* 1 2F = b b when η > c + bh (2.12)h w h max 12
Where, F* is the horizontal/vertical basic wave force, p1 and p2 are pressures at the top
and bottom of the element, respectively, bw is the element width that is normal to
14
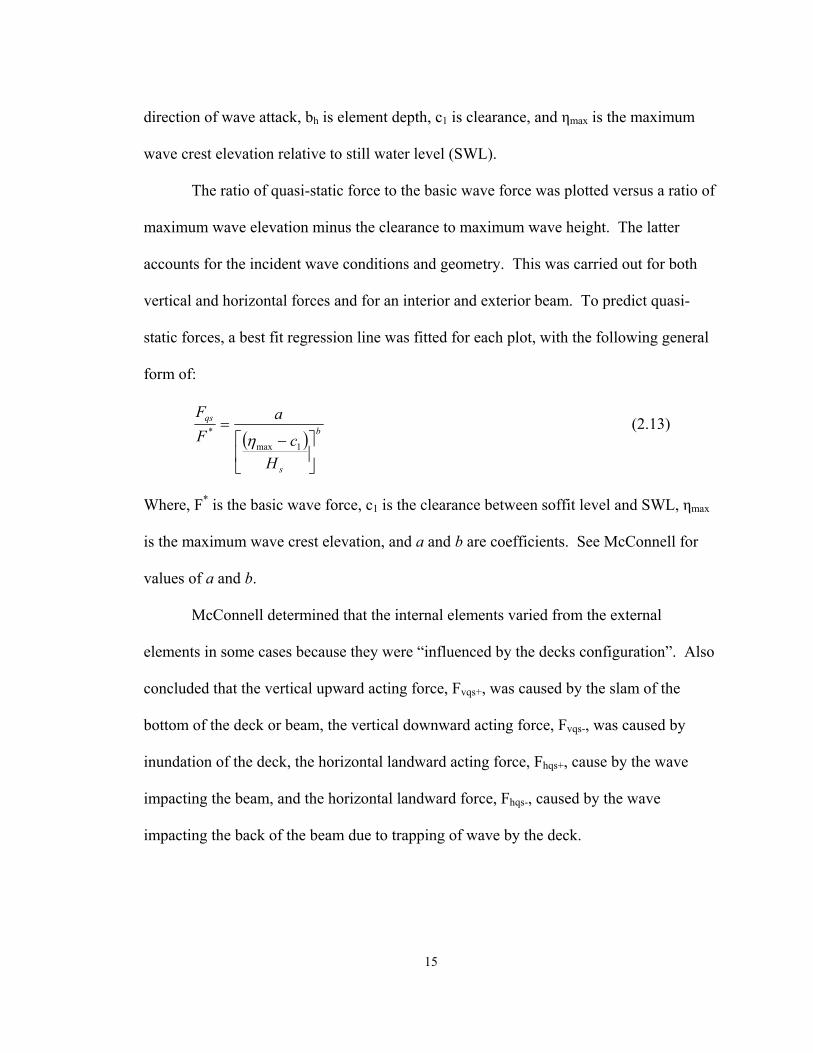
direction of wave attack, bh is element depth, c1 is clearance, and ηmax is the maximum
wave crest elevation relative to still water level (SWL).
The ratio of quasi-static force to the basic wave force was plotted versus a ratio of
maximum wave elevation minus the clearance to maximum wave height. The latter
accounts for the incident wave conditions and geometry. This was carried out for both
vertical and horizontal forces and for an interior and exterior beam. To predict quasi-
static forces, a best fit regression line was fitted for each plot, with the following general
form of:
F a F
qs * = ) b (2.13)
⎡(η − c ⎤max 1⎢ ⎥H⎣ s ⎦
Where, F* is the basic wave force, c1 is the clearance between soffit level and SWL, ηmax
is the maximum wave crest elevation, and a and b are coefficients. See McConnell for
values of a and b.
McConnell determined that the internal elements varied from the external
elements in some cases because they were “influenced by the decks configuration”. Also
concluded that the vertical upward acting force, Fvqs+, was caused by the slam of the
bottom of the deck or beam, the vertical downward acting force, Fvqs-, was caused by
inundation of the deck, the horizontal landward acting force, Fhqs+, cause by the wave
impacting the beam, and the horizontal landward force, Fhqs-, caused by the wave
impacting the back of the beam due to trapping of wave by the deck.
15
CHAPTER III
USER SUBROUTINE
Introduction
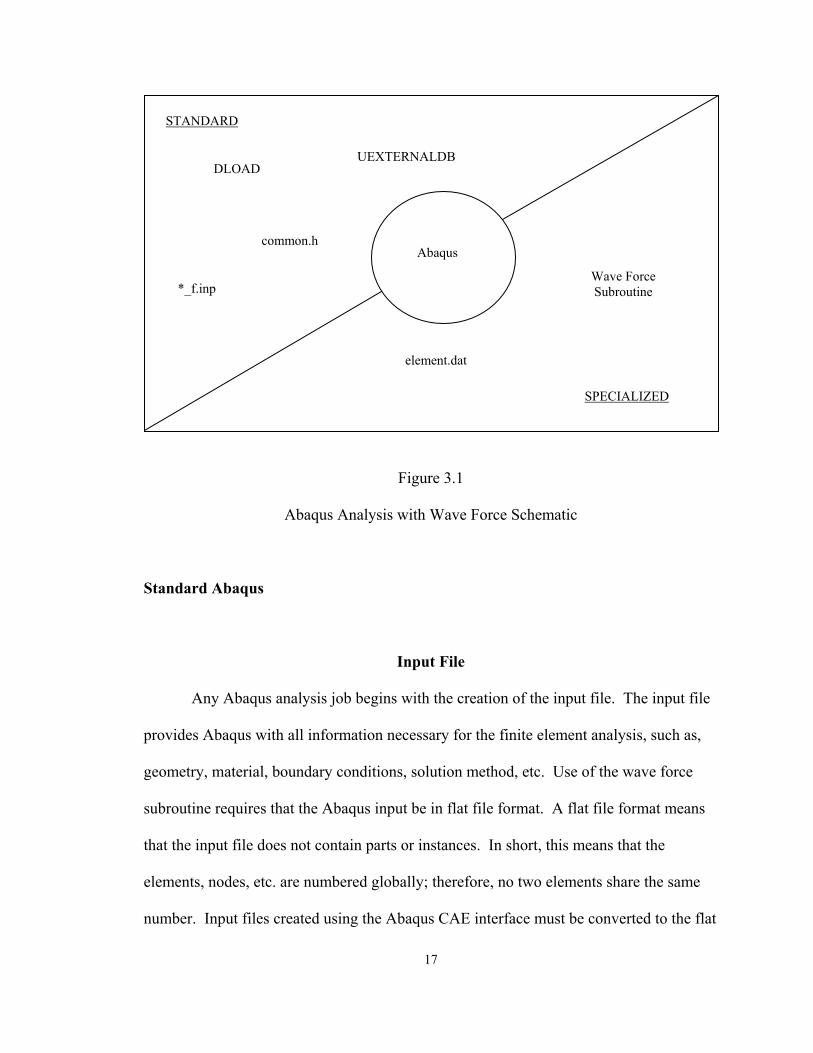
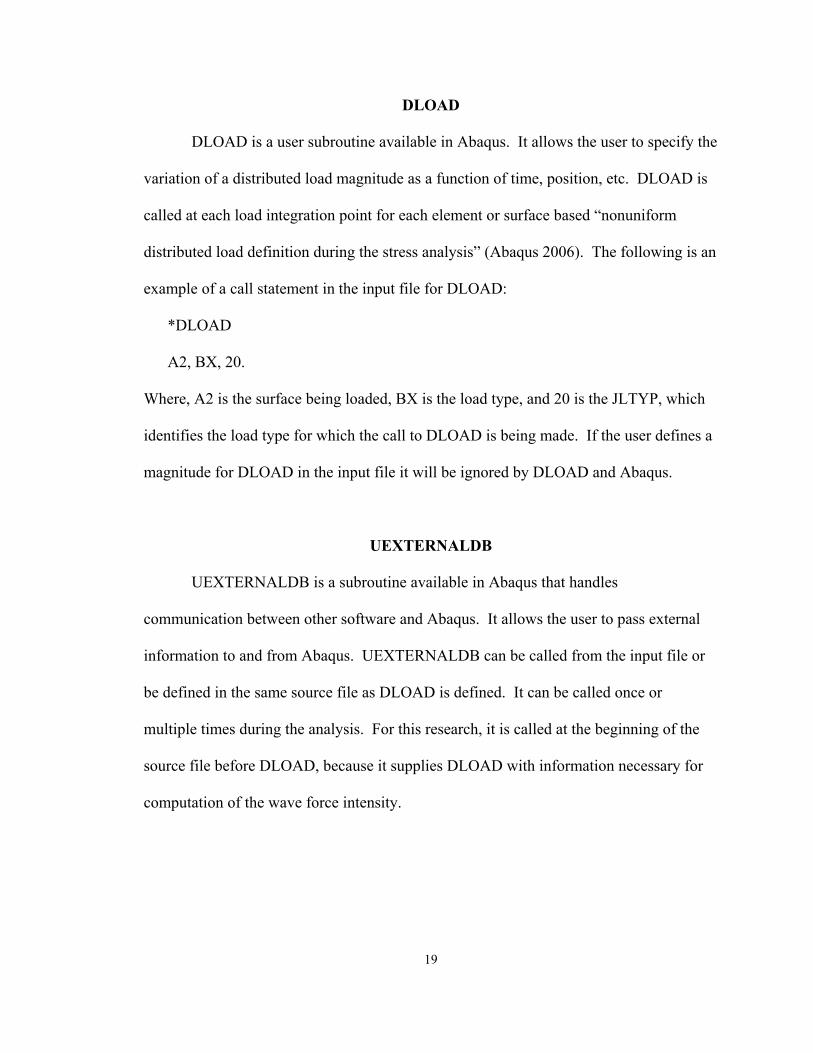
An Abaqus analysis run with Wave Force subroutine requires specialization in
input information and requires the following files (See Figure 3.1):
1. Abaqus Input File (*_f.inp)
2. Element.dat
3. Common.h
4. Wave Force Subroutine
a. Source.f
b. Surfaceforce.f
c. Bodyforce.f
d. Parameters.dat
16
STANDARD
UEXTERNALDB DLOAD
common.h Abaqus
Wave Force *_f.inp Subroutine
element.dat
SPECIALIZED
Figure 3.1
Abaqus Analysis with Wave Force Schematic
Standard Abaqus
Input File
Any Abaqus analysis job begins with the creation of the input file. The input file
provides Abaqus with all information necessary for the finite element analysis, such as,
geometry, material, boundary conditions, solution method, etc. Use of the wave force
subroutine requires that the Abaqus input be in flat file format. A flat file format means
that the input file does not contain parts or instances. In short, this means that the
elements, nodes, etc. are numbered globally; therefore, no two elements share the same
number. Input files created using the Abaqus CAE interface must be converted to the flat
17
file format. This is accomplished by adding the following to the Abaqus environment file
(Abaqus_*.env, *indicates the version of Abaqus):
print_flattened_file=ON
def onJobCompletion():
import os,osutils
if os.path.exits('%s_f.inp'%id):
src='%s_f.inp'%(id)
dest=savedir
if os.path.exists("%s_f.pes'%id):
src='%s_f.pes'%(id)
dest=savedir
osutls.copy(src,dest)
Common.h
Common.h sets aside the memory needed for interfacing between Abaqus and
Wave Force subroutine. Common.h is in common block format; it contains parameters
defined by the user and Abaqus through UEXTERNALDB to be used by DLOAD for
wave force calculation. UEXTERNALDB and DLOAD will be discussed later in the
chapter. The main reason common.h is used is to simplify the Wave Force subroutine
code. In common.h file, JSURFELEMENTS and NUM_ELS, must be supplied by the
user and will be discussed in depth later. See Appendix for common.h.
18
DLOAD
DLOAD is a user subroutine available in Abaqus. It allows the user to specify the
variation of a distributed load magnitude as a function of time, position, etc. DLOAD is
called at each load integration point for each element or surface based “nonuniform
distributed load definition during the stress analysis” (Abaqus 2006). The following is an
example of a call statement in the input file for DLOAD:
*DLOAD
A2, BX, 20.
Where, A2 is the surface being loaded, BX is the load type, and 20 is the JLTYP, which
identifies the load type for which the call to DLOAD is being made. If the user defines a
magnitude for DLOAD in the input file it will be ignored by DLOAD and Abaqus.
UEXTERNALDB
UEXTERNALDB is a subroutine available in Abaqus that handles
communication between other software and Abaqus. It allows the user to pass external
information to and from Abaqus. UEXTERNALDB can be called from the input file or
be defined in the same source file as DLOAD is defined. It can be called once or
multiple times during the analysis. For this research, it is called at the beginning of the
source file before DLOAD, because it supplies DLOAD with information necessary for
computation of the wave force intensity.
19
Specialized Abaqus
This section will deal with the “accounting” that comes from passing information
from Abaqus to the wave force subroutines and vise versa. The information that Abaqus
has the ability to pass to a user subroutine is limited. The available information is: the
step number, increment number, current value of time, total current value of time,
element number, load integration point (LIP) number, layer number, coordinates for LIP,
and the type of load. No information is available for the nodal points, only LIPs.
During a simulation, DLOAD is only able to retrieve the current LIP’s
coordinates. Furthermore, Abaqus does not supply the user subroutine with the LIP’s
surface orientation, which is needed to determine the components of the wave force,
since there are vertical, horizontal, and sloped elements. The element plane and nodal
information is supplied to DLOAD by the user through the use of UEXTERNALDB.
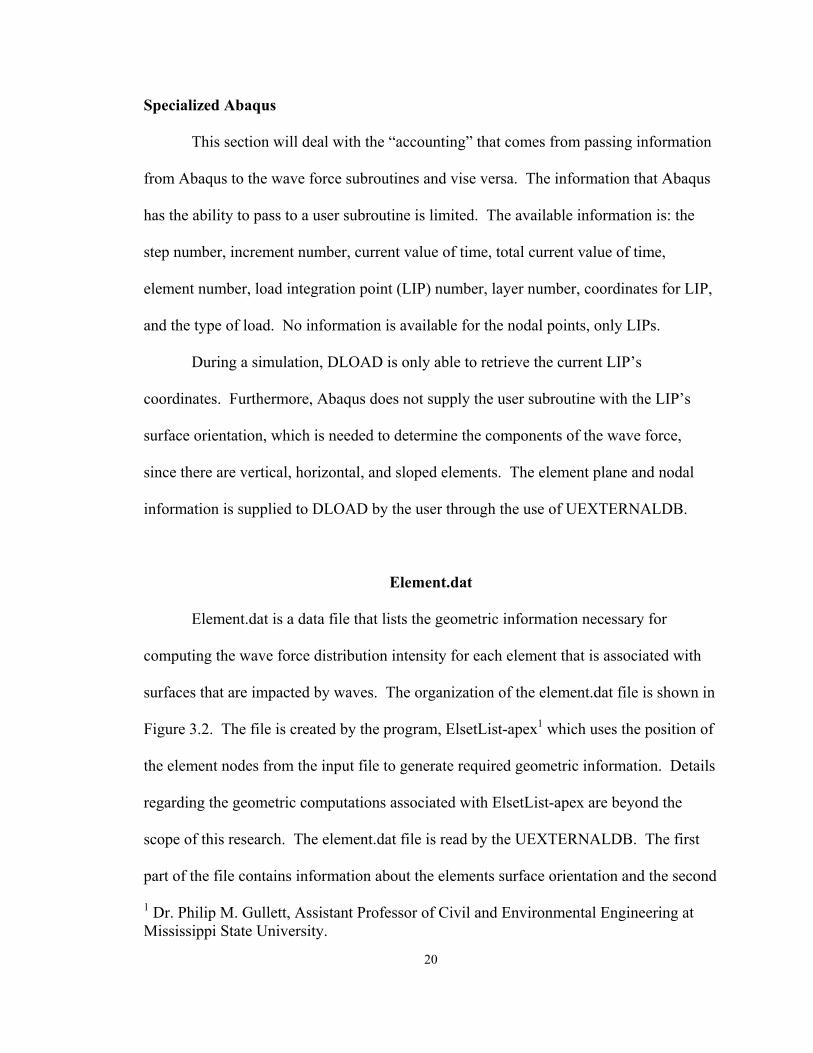
Element.dat
Element.dat is a data file that lists the geometric information necessary for
computing the wave force distribution intensity for each element that is associated with
surfaces that are impacted by waves. The organization of the element.dat file is shown in
Figure 3.2. The file is created by the program, ElsetList-apex1 which uses the position of
the element nodes from the input file to generate required geometric information. Details
regarding the geometric computations associated with ElsetList-apex are beyond the
scope of this research. The element.dat file is read by the UEXTERNALDB. The first
part of the file contains information about the elements surface orientation and the second
1 Dr. Philip M. Gullett, Assistant Professor of Civil and Environmental Engineering at Mississippi State University.
20

contains information about the elements volume. The values of JSURFELEMENTS and
NUM_ELS defined in common.h are found in this file. JSURFELEMENTS is the
number of elements that lie on the surfaces being loaded by DLOAD and is equal to the
value given on the first line of this file. NUM_ELS is to the total number of elements in
the input file and is equal to the value given on line 2+7(JSURFELEMENTS).
Figure 3.2
Element.dat Format and Explanation
Wave Force Subroutine
Calculation of the wave force intensity follows the formulation of Bea et, al.
(1999), for both horizontal and vertical wave forces. Vertical wave force calculation was
21
aided by Kerenyi’s technical notes (Kerenyi 2005). This formulation has been used
successfully in the oil industry for decades, giving results that match empirical
measurements of wave impact events. Furthermore, this method was selected so that the
loading could be varied as a function of time and position, which is not the case for the
other pressure based methods.
Surface Forces- Horizontal and Vertical
To determine the vertical and horizontal force intensities at surface integration
points, the size of the element face and the surface orientation are required. The
geometric information required for determination of element face area and orientation is
contained in the element.dat file. Because solid elements have six faces, one must first
determine which face the LIP lays in. The orientation of all elements faces is provided in
the element.dat file by specification of the equation the plane:
Ax + By + Cz + D = 0 (3.1)
A, B, C, and D are read from element.dat file. This information is then supplied to
DLOAD, where the subroutine runs through the plane information until the x, y, and z
coordinates of the LIPs satisfies Equation 3.1.
Once the correct plane has been identified, the vertical and horizontal components
of the surface forces are determined. The current implementation assumes that the
vertical direction is given by y, and that the motion of the wave is normal to the yz plane.
As such, all impact surfaces line parallel the z-axis. Thus the horizontal and vertical
components of the wave force are determined exclusively by a unit normal in the
direction (A,B). In DLOAD unit normal has the components (scale_x, scale_y).
22
One of the limitations of this approach is that the updated nodal coordinates are
not used to compute the vertical and horizontal wave force intensities, because
element.dat is based on the original coordinate positions given in the input file. This
limits the application to simulations with limited changes in surface orientation. As
stated above, Abaqus doe not provide access to the necessary information. One remedy
would be to update the element nodal positions and recomputed the element face
orientations.
DLOAD requires that the force be in units of FL-2, where F is a measurement of
force and L is a measurement of length. Equations 2.2 thru 2.4 were adjusted as follows:
F = scale _ x(0.5ρC u2 ) + scale _ y(0.5ρC w2 ) (3.2)s s s
Fd = scale _ x(0.5ρCdu2 ) (3.3)
Fl = scale _ y(0.5ρCl w2 ) (3.4)
Where, scale_x and scale_y specifies the surface orientation as stated above. Coefficients
are previously defined in Chapter 2 and values are provided to DLOAD through
parameters.dat file and are listed in Table 3.1. Inertia force are not calculated in DLOAD
but by Abaqus.
Table 3.1
Coefficients
CD 2 CL 2 CS π
23

The water particle velocities, u and w, are calculated assuming shallow water
conditions, given in Table 3.1. According to linear wave theory their equations are as
follows:
H g ⎛ 2πx 2πt ⎞u = cos⎜ − ⎟ (3.5)d2 ⎝ L T ⎠
Hπ ⎛ y ⎞ ⎛ 2πx 2πt ⎞w = ⎜1 + ⎟ sin⎜ − ⎟ (3.6)T ⎝ d ⎠ ⎝ L T ⎠
Where, H is wave height, g is gravity, d is water depth, L is wave length, t is time,
and T is wave period. For this research g is 32.4 ft/s2. All wave characteristic
information is supplied to the DLOAD through parameter.dat file.
Table 3.2
Wave Characteristics
T 6 s H 9' L 409' D 16'
Buoyancy
The determination of body loads due to buoyancy follows a first order
approximation procedure. Precise determination of the buoyancy force requires the
determination of the volume fraction of an arbitrary polygonal solid below an oriented
curved surface in three dimensions. Because of the nontrivial nature of the required
geometric computations involved a simplified approach was taken. Element.dat supplies
the minimum and maximum values of x, y, and z for each element. DLOAD uses this
information to determine whether an element is un-submerged, partially submerged, or 24
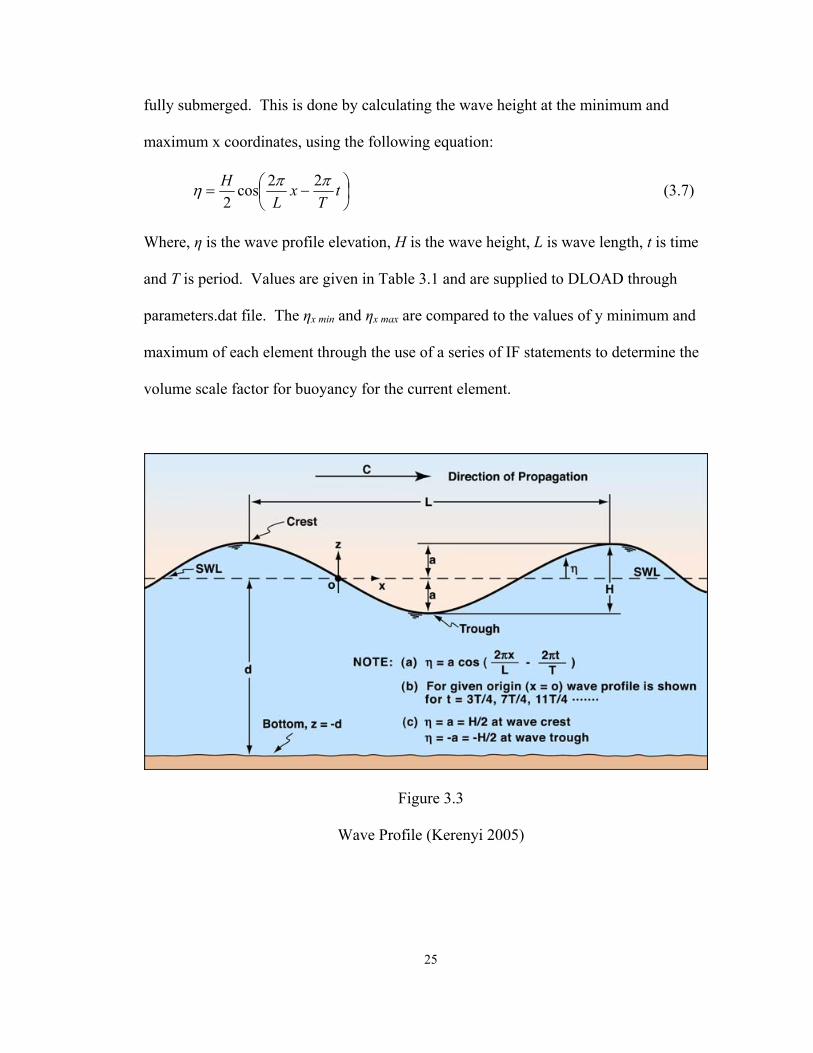
fully submerged. This is done by calculating the wave height at the minimum and
maximum x coordinates, using the following equation:
H ⎛ 2π 2π ⎞η = cos⎜ x − t ⎟ (3.7)2 ⎝ L T ⎠
Where, η is the wave profile elevation, H is the wave height, L is wave length, t is time
and T is period. Values are given in Table 3.1 and are supplied to DLOAD through
parameters.dat file. The ηx min and ηx max are compared to the values of y minimum and
maximum of each element through the use of a series of IF statements to determine the
volume scale factor for buoyancy for the current element.
Figure 3.3
Wave Profile (Kerenyi 2005)
25
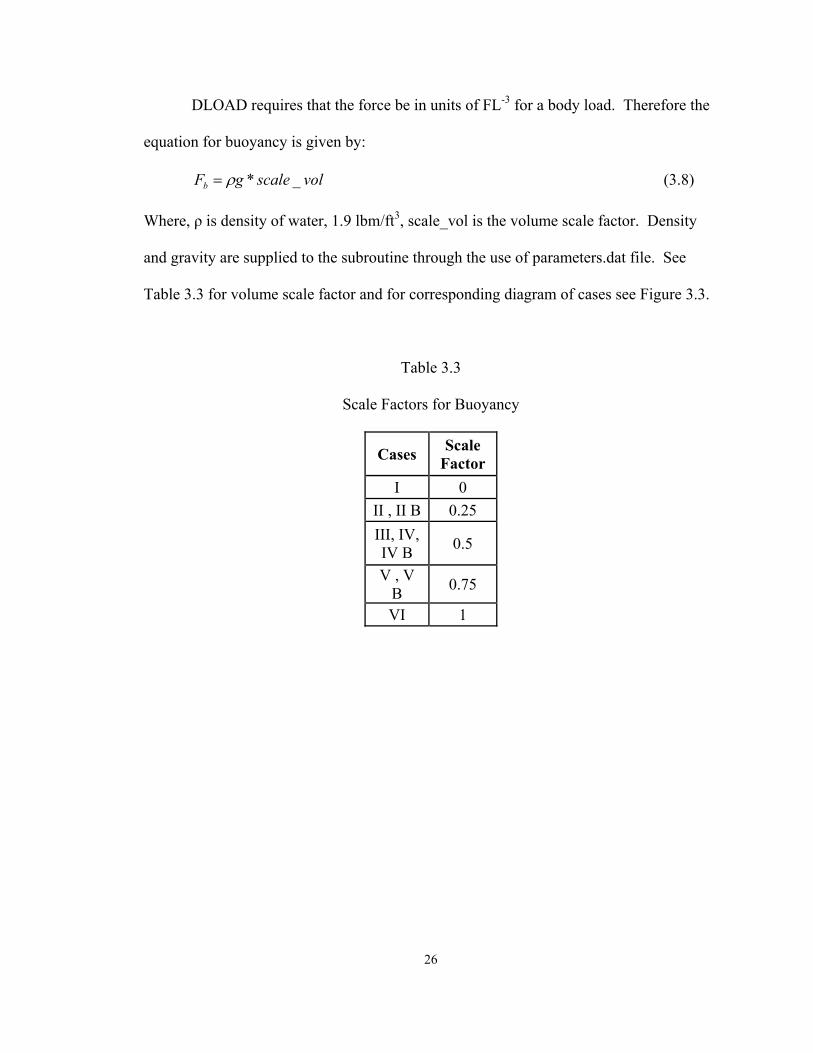
DLOAD requires that the force be in units of FL-3 for a body load. Therefore the
equation for buoyancy is given by:
Fb = ρg * scale _ vol (3.8)
Where, ρ is density of water, 1.9 lbm/ft3, scale_vol is the volume scale factor. Density
and gravity are supplied to the subroutine through the use of parameters.dat file. See
Table 3.3 for volume scale factor and for corresponding diagram of cases see Figure 3.3.
Table 3.3
Scale Factors for Buoyancy
Cases Scale Factor
I 0 II , II B 0.25 III, IV, IV B 0.5
V , V B 0.75
VI 1
26
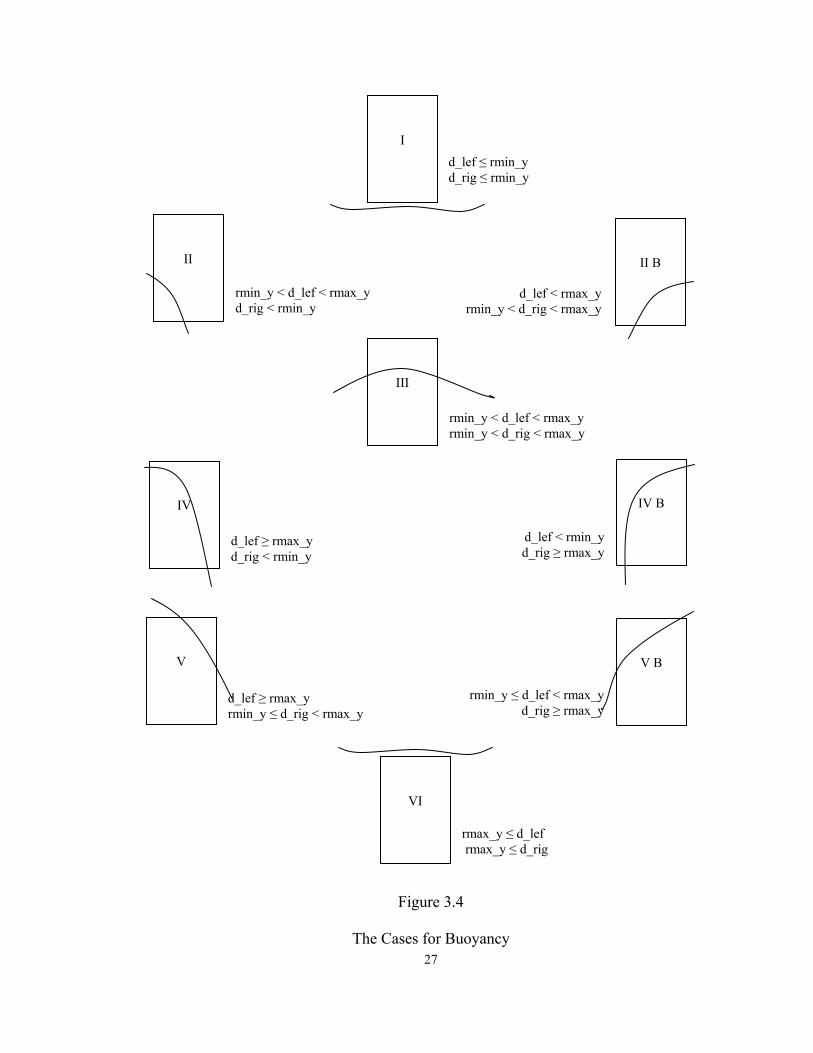
I
d_lef ≤ rmin_y d_rig ≤ rmin_y
II II B
rmin_y < d_lef < rmax_y d_lef < rmax_y d_rig < rmin_y rmin_y < d_rig < rmax_y
III
rmin_y < d_lef < rmax_y rmin_y < d_rig < rmax_y
IV IV B
d_lef < rmin_y d_lef ≥ rmax_y d_rig ≥ rmax_y d_rig < rmin_y
rmin_y ≤ d_lef < rmax_y
V V B
d_lef ≥ rmax_y d_rig ≥ rmax_y rmin_y ≤ d_rig < rmax_y
VI
rmax_y ≤ d_lef rmax_y ≤ d_rig
Figure 3.4
The Cases for Buoyancy 27
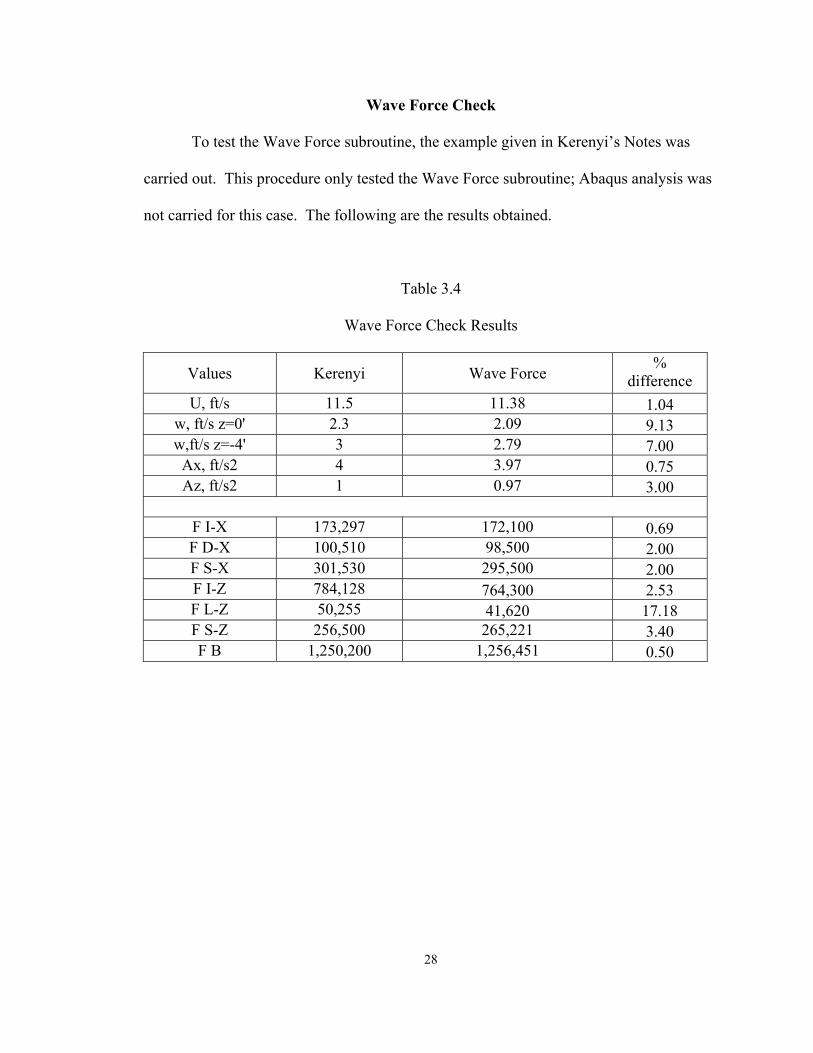
Wave Force Check
To test the Wave Force subroutine, the example given in Kerenyi’s Notes was
carried out. This procedure only tested the Wave Force subroutine; Abaqus analysis was
not carried for this case. The following are the results obtained.
Table 3.4
Wave Force Check Results
Values Kerenyi Wave Force %
difference U, ft/s 11.5 11.38 1.04
w, ft/s z=0' 2.3 2.09 9.13 w,ft/s z=-4' 3 2.79 7.00
Ax, ft/s2 4 3.97 0.75 Az, ft/s2 1 0.97 3.00
F I-X 173,297 172,100 0.69 F D-X 100,510 98,500 2.00 F S-X 301,530 295,500 2.00 F I-Z 784,128 764,300 2.53 F L-Z 50,255 41,620 17.18 F S-Z 256,500 265,221 3.40 F B 1,250,200 1,256,451 0.50
28
CHAPTER IV
NUMERICAL SIMULATION
Introduction
The program of choice is Abaqus, which was developed in 1978 by a group of
Brown Doctoral graduates. Abaqus is a general purpose finite element program which
has the capabilities of solving both static and dynamic problems, modeling large
displacement and contact problems. It also has a large library of elements and materials
available to the user.
Abaqus has two main methods of solving problems. The first is Abaqus/Standard
which solves a system of equation at each solution time increment using implicit
numerical integration. The second is Abaqus/Explicit which “marches a solution forward
through time in small time increments without solving a coupled system of equations at
each increment (Abaqus 2006).” For this research Abaqus/Standard will be used.
Abaqus uses steps so that a procedure can be solved using both static and dynamic
analysis. It also allows the user to prescribe loads, boundary conditions, and output
request for each step.
Abaqus has a built in feature, Aqua, that calculates wave loading. However due
to its makeup it was not able to be used for this research. “ABAQUS/Aqua contains
optional features that are specifically designed for the analysis of beam-like structures
installed underwater and subject to loading by water currents and wave action..” 29
Limitations are such that Abaqus/Aqua analysis “will calculate drag, buoyancy, and
inertia loading only for beam, pipe, elbow, truss, and certain rigid elements.” (Abaqus
2006)
Abaqus does not have built in units, except for rotation and angles. There the user
must take great care in making sure that all values are consistent. For this research,
English units will be used (feet and pounds).
Abaqus/CAE is a graphical interface where the user can specify all necessary
information. Abaqus must be supplied information about the geometry of an object. If a
model has more than one object, it must be told how the objects relate to each other- this
is done through the assembly module. The user must also specify a material model-
elastic, plastic, etc. More than one material model can be defined for an assembly of
objects. For an assembly, the interaction between the objects must be defined through
contact behavior. Along with interactions, the user must specify the boundary conditions.
Abaqus has a large library of different types of boundary conditions available to the user.
Loads can be applied to the objects as concentrated, distributed, and so on. As stated in
Chapter III, the loads can be supplied through the use of DLOAD. The user must also
specify the mesh density. The final step is to specify the analysis procedure and the
relevant parameters.
Model
Two models are examined in this research. The first is a simple block which is
used to assess the accuracy of the results by comparing numerical results with analytic
solutions. The second is that of a realistic bridge structure. The geometry of the model is
30
patterned after a typical section of the Biloxi Bay Bridge destroyed by Hurricane Katrina
in 2005.
Simple Block
The simple block example will be used purely as a way to check the validity of
Wave Force calculations and was used in debugging the interface between Abaqus and
the user subroutines, UEXTERNALDB and DLOAD.
Geometry
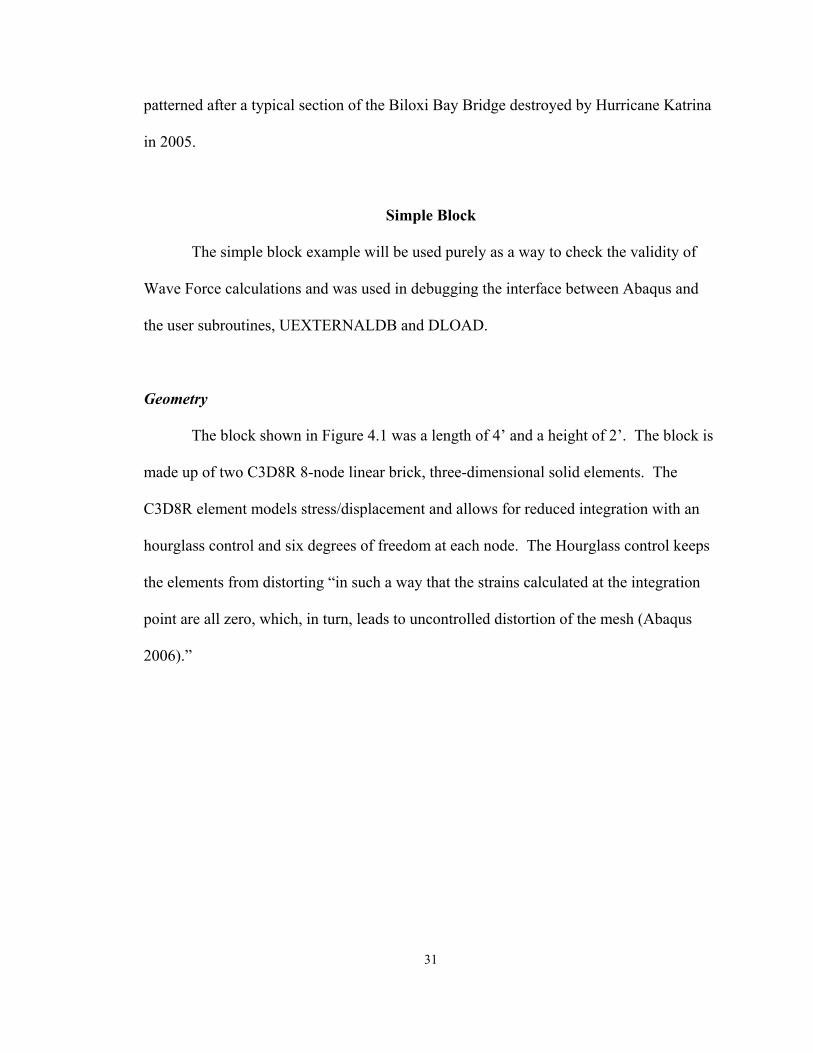
The block shown in Figure 4.1 was a length of 4’ and a height of 2’. The block is
made up of two C3D8R 8-node linear brick, three-dimensional solid elements. The
C3D8R element models stress/displacement and allows for reduced integration with an
hourglass control and six degrees of freedom at each node. The Hourglass control keeps
the elements from distorting “in such a way that the strains calculated at the integration
point are all zero, which, in turn, leads to uncontrolled distortion of the mesh (Abaqus
2006).”
31
Figure 4.1
Simple Block
Material Properties
Unreinforced concrete is used for the material model. The elastic region of
concrete is modeled from ACI Building Code. The secant modulus of elasticity (psi) for
concrete is given by the following equation:
E = 33w 1.5 f ' (4.1)c c c
Where, wc is the density of concrete, taken to be 150 lb/ft3. The yield strength of
concrete, fc’ is 4,000 psi, which fits in the range of normal weight concrete elastic
modulus of 2,000,000 psi to 6,000,000 psi (Kosmatka 2002). The Poisson’s ratio for
normal concrete is taken to be 0.21(Kosmatka 2002).
32
Figure 4.2
Stress-Strain Curve for Concrete
Boundary Conditions
The block is fixed at both ends along the bottom edges, so that Dx=Dy=Dz=0.
Load
The block is loaded with its self weight, in step 1, which is a static procedure. In
step 2, the block is loaded with buoyancy and the horizontal and vertical components of
Wave Force, which was discussed in Chapter 3.
33
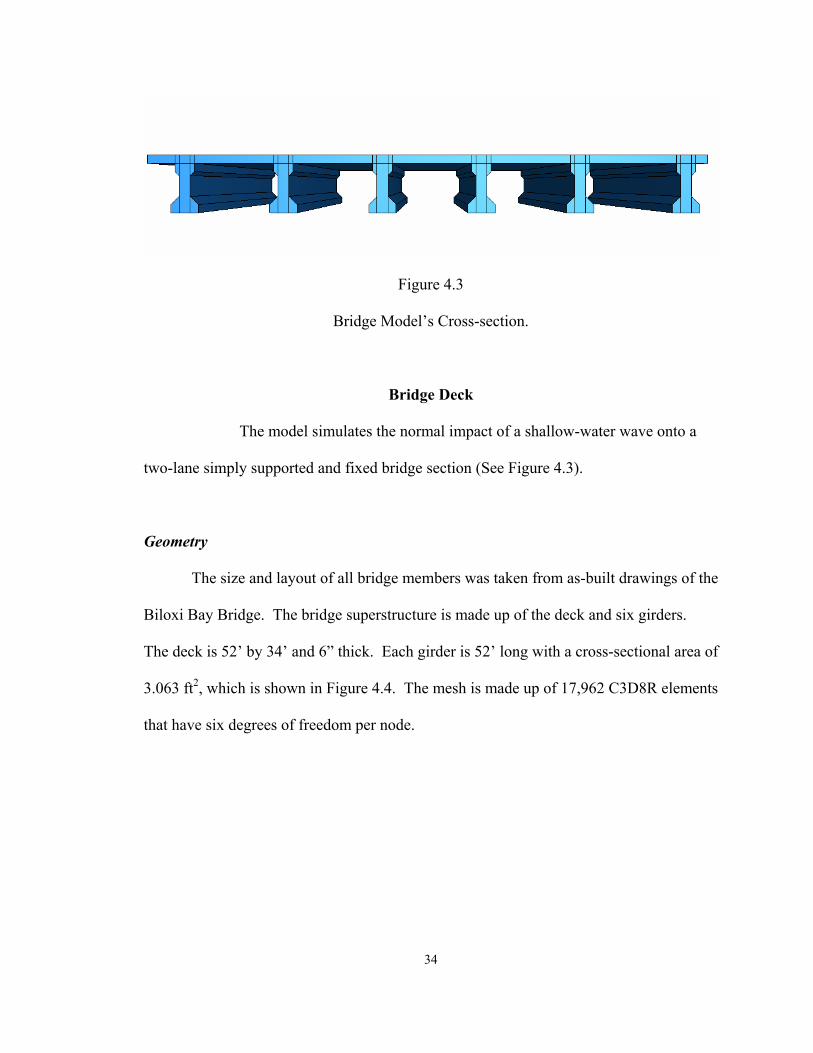
Figure 4.3
Bridge Model’s Cross-section.
Bridge Deck
The model simulates the normal impact of a shallow-water wave onto a
two-lane simply supported and fixed bridge section (See Figure 4.3).
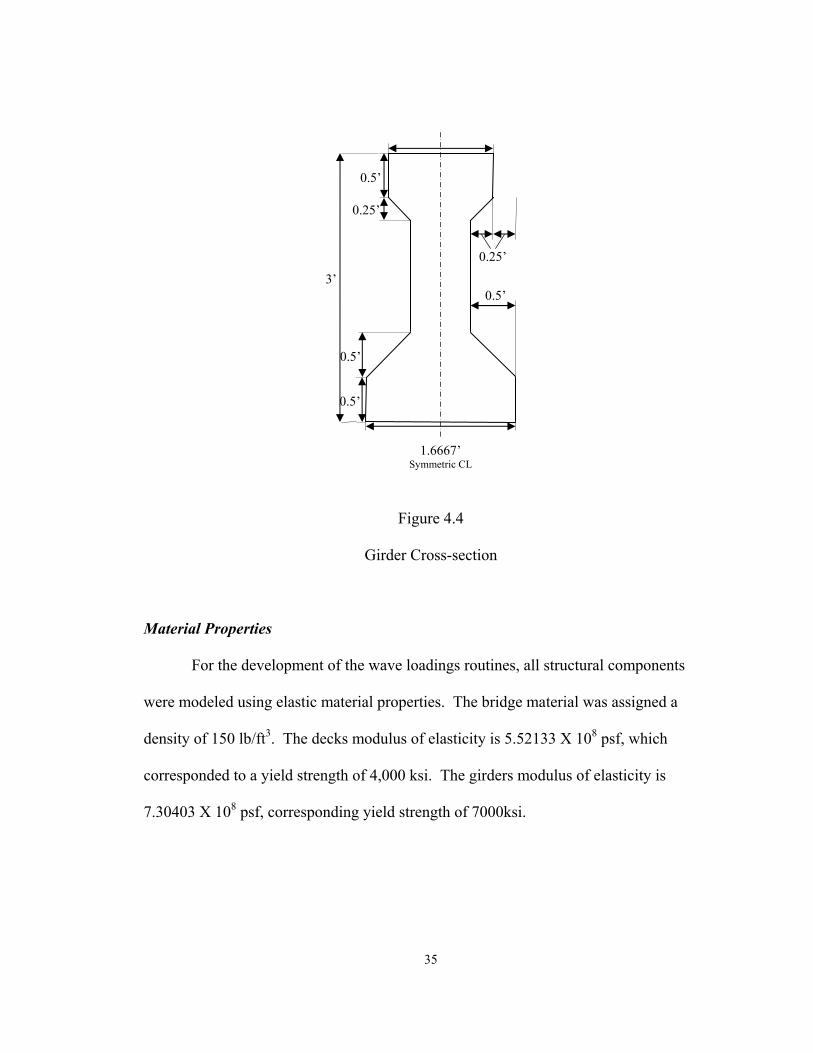
Geometry
The size and layout of all bridge members was taken from as-built drawings of the
Biloxi Bay Bridge. The bridge superstructure is made up of the deck and six girders.
The deck is 52’ by 34’ and 6” thick. Each girder is 52’ long with a cross-sectional area of
3.063 ft2, which is shown in Figure 4.4. The mesh is made up of 17,962 C3D8R elements
that have six degrees of freedom per node.
34
3’
1.1667’
0.5’
0.25’
0.5’
0.5’
0.5’
0.25’
1.6667’ Symmetric CL
Figure 4.4
Girder Cross-section
Material Properties
For the development of the wave loadings routines, all structural components
were modeled using elastic material properties. The bridge material was assigned a
density of 150 lb/ft3. The decks modulus of elasticity is 5.52133 X 108 psf, which
corresponded to a yield strength of 4,000 ksi. The girders modulus of elasticity is
7.30403 X 108 psf, corresponding yield strength of 7000ksi.
35
Support Boundary Conditions
The bridge superstructure is supported by pile caps. The pile caps are modeled as
rigid surfaces as shown in Figure 4.5. The contact between the girders and pile caps is
modeled as frictionless tangential behavior. Two separate connections between the
bridge girders and pile caps were considered:
Case I, Fixed- The girders are fixed to the pile caps along the contact area through
a tie constraint (d1=d2=d3=0). The pile caps are fixed in six degrees of freedom; know
as the ENCARTE constraint in Abaqus.
Case II, Simply Supported- The girders are held in place by their own weight and
the weight of the bridge deck. The girders are connected to the deck by a tie constraint of
the surface area they share. Since the bridge is not connected to the pile caps, there is an
initial connection modeled by two axial-rotation connectors from each pile cap to the
respective girder. The connectors have a very low stiffness and have no structural
relevance.
36
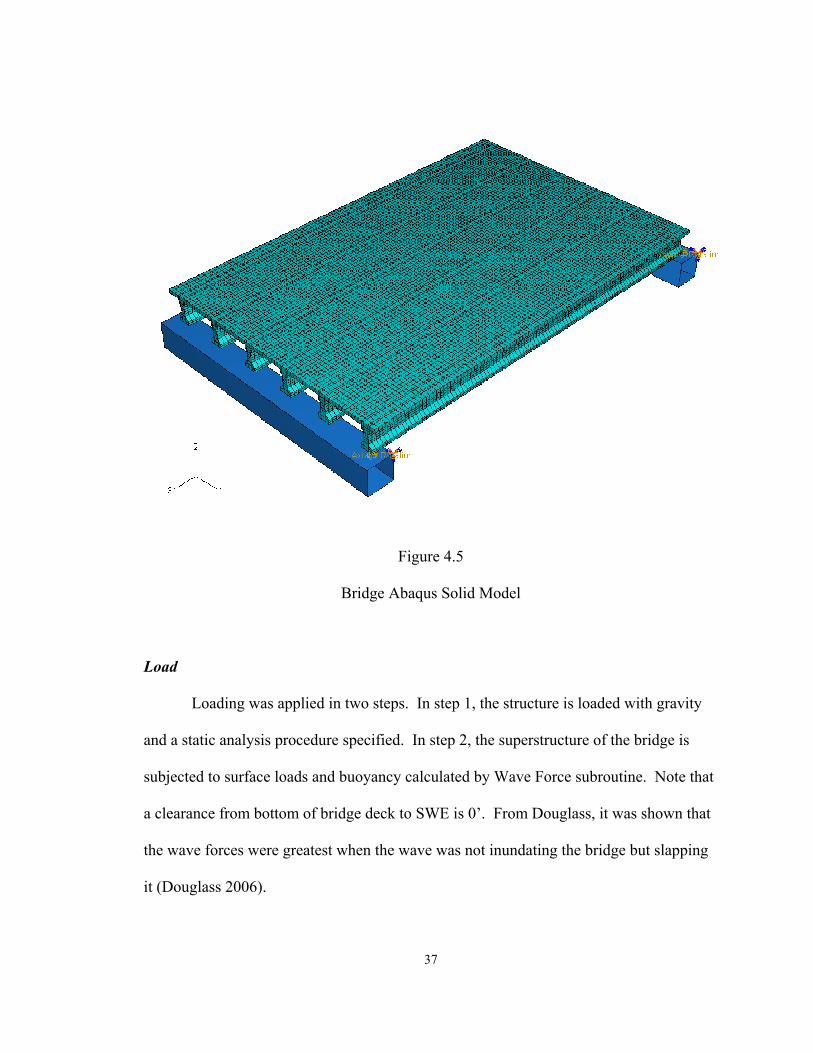
Figure 4.5
Bridge Abaqus Solid Model
Load
Loading was applied in two steps. In step 1, the structure is loaded with gravity
and a static analysis procedure specified. In step 2, the superstructure of the bridge is
subjected to surface loads and buoyancy calculated by Wave Force subroutine. Note that
a clearance from bottom of bridge deck to SWE is 0’. From Douglass, it was shown that
the wave forces were greatest when the wave was not inundating the bridge but slapping
it (Douglass 2006).
37
Response of Structure
Simple Block
The simple block example was loaded with three different load cases: gravity
only, gravity plus buoyancy, and gravity, buoyancy, and surface loads. Since this
example is a Wave Force calculation check, the wave characteristics were those used in
the Kerenyi example, as shown in Table 4.1.
Table 4.1
Wave Characteristics for Simple Block
T 18 s H 16' L 409' D 16'
For the first case, simple block is loaded with only its self-weight. The maximum
displacement is approximately 0.007 inches at the mid-span. Using the equation for
maximum displacement (∆MAX) of a simply-supported beam with uniform distributed
load;
5wl 4
∆ = (4.2)MAX 384EI
Where w is the distributed load, in lb/in, l is the length of the beam in inches, E is the
elastic modulus in psi from equation 4.1, and I is the moment of inertia about the x-axis
in cubed inches. Using this equation a maximum displacement of 0.000 inches was
calculated.
38
For the second case, the simple block is loaded with both buoyancy and gravity.
The maximum displacement was calculated to be 0.004 inches. This agrees well with
expected result. Because the displacement for small displacements is linearly related to
the distributed load, the expected displacement of the submerged block is 0.007*(150-
62.4)/150=0.004. This shows that the buoyancy forces computed by the wave force were
correct. Comparing this value to the maximum displacement from gravity it is clear to
see that buoyancy is not great enough in this case to overcome gravity, due to the fact that
the block is not completely submerged.
For the third case, the simple block is loaded with gravity, buoyancy, and the
surface forces due to wave impact. The maximum displacement is 0.01 inches. From
this value it can be seen that the surface forces have some effect on the object.
After performing this example and looking at the displacements, the wave
characteristics were changed to those given in Table 3.1 to better model the conditions
for at the Biloxi Bay Bridge. For these characteristics, a maximum displacement of
0.00768 inches was calculated.
Bridge Deck
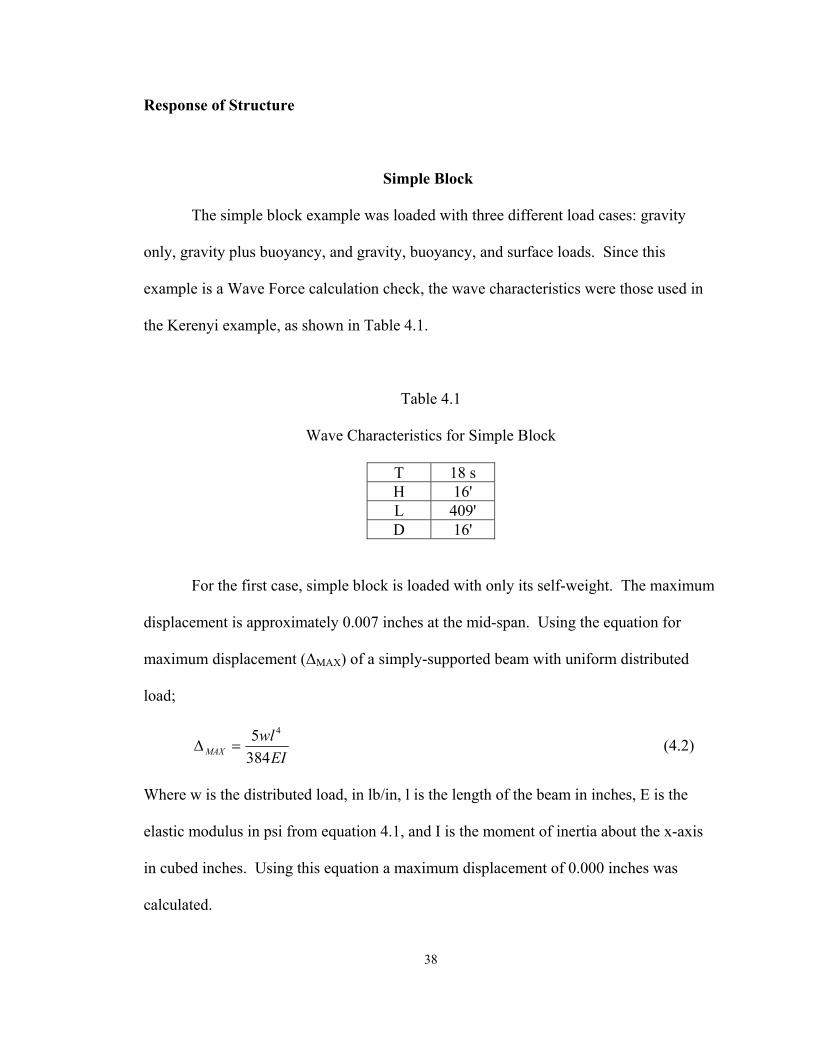
Case I- Fixed- The bridge section was loaded with the Wave Force subroutine
given the wave characteristics in Table 3.2 in Chapter III. A maximum deformation of
7/32” was observed at the seaward size of the mid span of the bridge deck, which is
shown in Figure 4.6.
39
Figure 4.6
Fixed Bridge Model
Case II- Simply Supported- In this simulation, the only resistance to move is the
weight of the bridge. The length of time of the wave force loading is 6 s, the period of
the wave. At a time of 4 s, the bridge is lifted off of the pile caps by 1.1’, vertically. At a
time of 6 s, the end of the wave force subroutine, the bridge has been move 7.6’
horizontally. Refer to Figures 4.7 and 4.8. These results correspond to what was
observed at Biloxi Bay Bridge after Hurricane Katrina, all bridge sections that were not
above the surge height were moved off of their pilings.
40
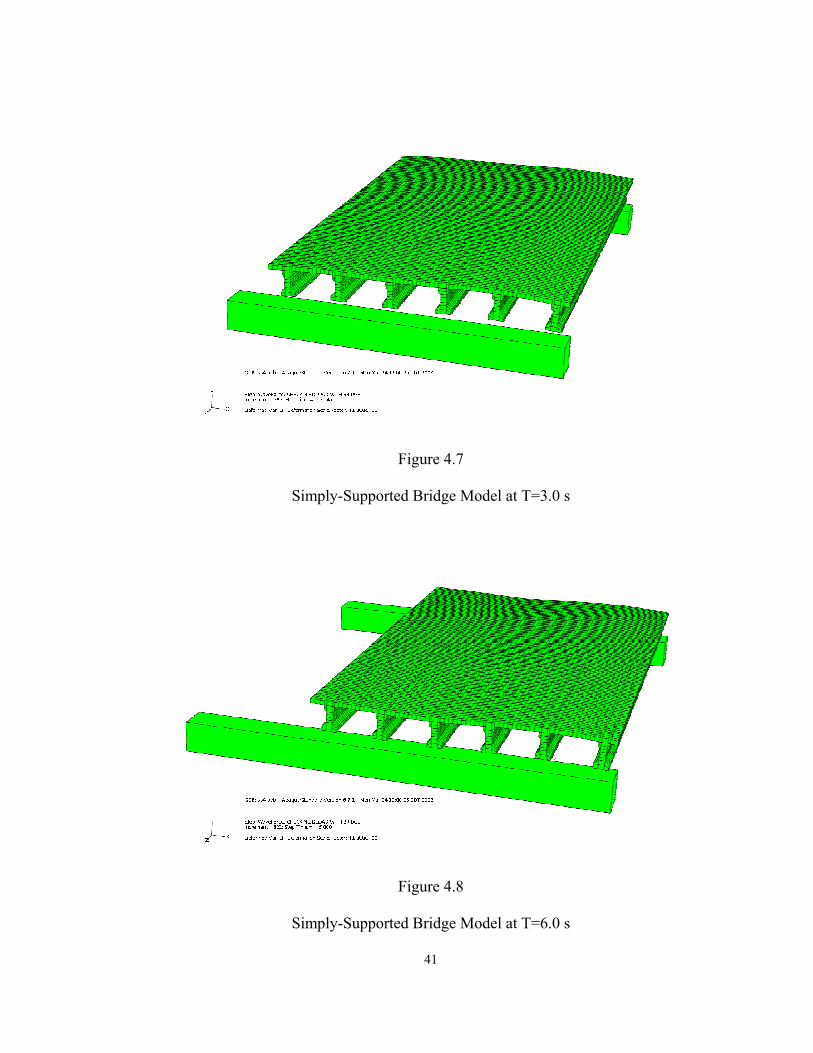
Figure 4.7
Simply-Supported Bridge Model at T=3.0 s
Figure 4.8
Simply-Supported Bridge Model at T=6.0 s
41
CHAPTER V
CONCLUSIONS
The destructive nature of storm surge on coastal structures makes the need to
examine the design procedures of essential structures critical. As a first step, the
development of methods to predict wave loads on complex structures was examined, and
computational routines were developed and implemented into the Abaqus finite element
code that application of time dependant, spatially varying wave forces to flexible
structures of arbitrary complexity.
This research did not address some areas of interest. For one, it did not address
energy dissipation of the wave from impacting the bridge. Moreover, computation of
wave forces did not account for movement of the structure. As such, wave forces were
computed using initial position of the bridge structure thus there may be cases in which
displaced geometry there would be no wave force, but forces are still applied. Once the
structure stops moving, there would be another impact force (Gullett 2008).
While the geometry of this model was based on typical bridge components taken
from design drawings, no effort was made to presentment the material behavior or the
inertial reinforcement of the bridge with precision. Changes for accurate representation
of the bridge structure would include representation of reinforcement, prestressing, and
material response.
42
The results that were obtained from fixing the bridge deck indicate that the bridge
would fall under wave force loading. The seaward most beam would be subjected to the
brunt of the wave, putting the seaward side into maximum compression and the leeward
side into maximum tension. The wave force effects would only be magnified when wind
and entrapped air were accounted for. Therefore, the best approach in designing bridges
for wave forces is to raise them above appropriate surge height.
43
REFERENCES
AASHTO. (2006). AASHTO LRFD Bridge Design Specifications, American Association of State Highway and Transportation Officials.
Abaqus, I. (2006). "Abaqus Version 6.6 PDF Documentation."
Bea, R. G., Xu, T., Stear, J., and Ramos, R. (1999). "Wave Forces on Decks of Offshore Platforms." Journal of Waterway, Port, Coastal, and Ocean Engineering, 125(May/June), 136-144.
Bergeron, A. (2007). "Contractor Ahead of Schedule On Biloxi Bay Bridge Erection."
Denson, K. (1981). "Final Report Pressures on Coastal Bridges Due to Normal Incidence Waves."
Douglass, S. L., Chen, Q., and Olsen, J. M. (2006). "Wave Forces on Bridge Decks." Office of Bridge Technology, Washington, DC.
Gullett, P. M. (2008). "(Personal Communication)."
Kerenyi, K. (2005). "Wave Forces on Bridge Decks." Federal Highway Administration, McLean, VA.
Kosmatka, S. H. (2002). "Design and Control of Concrete Mixtures." Portaland Cement Association, Skokie, Illinois.
McConnell, K. J., Allsop, N. W. H., Cuomo, G., and Cruickshank, I. C. (2003). "New Guidance for Wave Forces on Jetties in Exposed Locations." Proceedings of the Sixth Conference on coastal and Port Engineering Developing Countries, Colombo, Sri Lanka.
44

MDOT. (2006). "Gulf Coast Maps 2005 - Biloxi."
Morison, J. R., O'Brien, M. P., Johnson, J. W., and Schaaf, S. A. (1950). "The Force Exerted by Surface Waves on Piles." Petroleum Transactions, 189, 149-157.
O'Connor, J. (2005). " US 90 over Biloxi Bay Between Harrison and Jackson Counties, Mississippi."
Robertson, I. N., Riggs, H. R., Yim, S. C. S., and Young, Y. L. (2007). "Lessons from Hurricane Katrina Storm Surge on Bridges and Buildings." Journal of Waterway, Port, Coastal, and Ocean Engineering, 133(6), 463-483.
Wikipedia. (March 1, 2008). "Bridge."
Yim, S. C. (2005). "Modeling and Simulation of Tsunami and Storm Surge Hydrodynamic Loads on Coastal Bridge Structures."
45
APPENDIX A
USER SUBROUTINES
46
SOURCE.F
SUBROUTINE UEXTERNALDB(LOP,LRESTART,TIME,DTIME,KTSTEP,KINC)
INCLUDE 'ABA_PARAM.INC' CHARACTER*80 SNAME
INTEGER, PARAMETER :: IN_BR = 30INTEGER, PARAMETER :: SRMAX = 6INCLUDE 'COMMON.H'
OPEN (unit=IN_BR,1 file='/cavs/cmd/data1/users/maryd/element.dat',1 status='old')
READ(IN_BR,*) IDUM, IDUM
DO I=1,JSURFELEMENTSREAD(IN_BR,*) LIST_EL(I), PLANE_INFO(1,I),
PLANE_INFO(2,I),1 PLANE_INFO(3,I), PLANE_INFO(4,I),
PLANE_INFO(5,I),2 PLANE_INFO(6,I), PLANE_INFO(7,I),
PLANE_INFO(8,I),2 PLANE_INFO(9,I), PLANE_INFO(10,I),3 PLANE_INFO(11,I), PLANE_INFO(12,I),
PLANE_INFO(13,I),3 PLANE_INFO(14,I), PLANE_INFO(15,I),4 PLANE_INFO(16,I), PLANE_INFO(17,I),
PLANE_INFO(18,I),4 PLANE_INFO(19,I), PLANE_INFO(20,I),5 PLANE_INFO(21,I), PLANE_INFO(22,I),
PLANE_INFO(23,I),5 PLANE_INFO(24,I), PLANE_INFO(25,I),6 PLANE_INFO(26,I), PLANE_INFO(27,I),
PLANE_INFO(28,I),6 PLANE_INFO(29,I), PLANE_INFO(30,I)
CALL flush(6)END DO
READ(IN_BR,*) IDUM
DO I=1, NUM_ELSREAD(IN_BR,*) LIST_EL2(I), RMIN_X(I), RMAX_X(I),
RMIN_Y(I),1 RMAX_Y(I), RMIN_Z(I), RMAX_Z(I), VOL(I)
47
END DO
CLOSE(in_br)
RETURN END
SUBROUTINE DLOAD(F,KSTEP,KINC,TIME,NOEL,NPT,LAYER,KSPT,
1 COORDS,JLTYP,SNAME)
INCLUDE 'ABA_PARAM.INC'
DIMENSION TIME(2), COORDS(3)CHARACTER*80 SNAME
INCLUDE 'COMMON.H' IF (JLTYP.EQ.0) THENCALL SURFACEMAIN(COORDS,NOEL,TIME,F,NPT)
ELSE CALL BODYMAIN(COORDS,TIME,F,NOEL,NPT)
ENDIF
RETURN END
INCLUDE 'bodyforce.f'INCLUDE 'surfaceforce.f'
48
SURFACEFORCE.F
SUBROUTINE SURFACEMAIN(COORDS,NOEL,TIME,F,NPT)INCLUDE 'ABA_PARAM.INC'
DIMENSION COORDS(3), TIME(2)
INCLUDE 'COMMON.H' CALL PLANETEST(COORDS, NOEL, IPLANE)CALL WVPRTKIN(TIME,COORDS)CALL WVFORCE(COORDS,NOEL,TIME,F,NPT)
RETURN END
SUBROUTINE PLANETEST (COORDS, NOEL, IPLANE)
INCLUDE 'ABA_PARAM.INC'
DIMENSION COORDS(3)CHARACTER*80 SNAME
INTEGER INDEX REAL*8 E1 PARAMETER(TOL=1E-2)
INCLUDE 'COMMON.H' DO I = 1, JSURFELEMENTSIF(NOEL .EQ. LIST_EL(I)) THENINDEX = I
END IF END DO
DO I = 1, 6J = (I - 1) * 5E1 =
PLANE_INFO(1+J,INDEX)*COORDS(1)+PLANE_INFO(2+J,INDEX)*1
COORDS(2)+PLANE_INFO(3+J,INDEX)*COORDS(3)+PLANE_INFO(4+J,INDEX)
IF (ABS(E1).LT. TOL) THENIPLANE = J GOTO 700
END IF END DO
700 CONTINUE 49
SCALE_X=ABS(PLANE_INFO(1+IPLANE,INDEX))SCALE_Y=ABS(PLANE_INFO(2+IPLANE,INDEX))AREA=PLANE_INFO(5+IPLANE,INDEX)
RETURN END
SUBROUTINE WVPRTKIN(TIME,COORDS)
INCLUDE 'ABA_PARAM.INC'
DIMENSION TIME(2), COORDS(3)CHARACTER*80 SNAME
REAL*8 THEAT, COST, SINT, PIOT, X, YINTEGER, PARAMETER :: K=21
INCLUDE 'COMMON.H'
OPEN (unit=K,file='/cavs/cmd/data1/users/maryd/parameters.dat',
1 status='old')
READ(K,*) DES, G, PI, D, H, WL, T, CD, CL, CS
CLOSE(K)
THETA=2*PI*((COORDS(1)/WL)-(TIME(1)/T) )COST=dCOS(THETA)SINT=dSIN(THETA)PIOT=PI/T
WVELX=0.5*H*dSQRT(G/D)*COSTWVELY=H*PIOT*(1+COORDS(2)/D)*SINT
RETURN END
SUBROUTINE WVFORCE(COORDS,NOEL,TIME,F,NPT)
INCLUDE 'ABA_PARAM.INC' DIMENSION TIME(2), COORDS(3)CHARACTER*80 SNAME
CHARACTER*80 SFILE INTEGER, PARAMETER :: fo_s=22
50
INCLUDE 'COMMON.H'
FDL=SCALE_X*(0.5*CD*DES*WVELX*WVELX)+1 SCALE_Y*(0.5*CL*DES*WVELY*WVELY)
FS=SCALE_X*(0.5*CS*DES*WVELX*WVELX)+1 SCALE_Y*(0.5*CS*DES*WVELY*WVELY)
F=FDL+FS
RETURN END
51
BODYFORCE.F
SUBROUTINE BODYMAIN(COORDS,TIME,F,NOEL,NPT)
INCLUDE 'ABA_PARAM.INC'
DIMENSION TIME(2), COORDS(3)CHARACTER*80 SNAME
CHARACTER*80 PFILE CHARACTER*80 BFILE INTEGER,PARAMETER :: fo_b=22REAL*8 DES, G, PI, D, H, WL, TINTEGER, PARAMETER :: L=21
REAL*8 WHL, WHRREAL*8 SCALE_VOL, LEG_X, LEG_Y, LEG_Z
INCLUDE 'COMMON.H'
PFILE='/cavs/cmd/data1/users/maryd/parameters.dat'OPEN (unit=L, file=PFILE, status='old')
READ(L,*) DES, G, PI, D, H, WL, T
CLOSE(L)
DO I = 1, NUM_ELSIF(NOEL .EQ. LIST_EL2(I)) THENINDEX = I
END IF END DO
WHL=0.5*H*DCOS((2*PI*RMIN_X(INDEX)/WL)-(2*PI*TIME(1)/T))
WHR=0.5*H*DCOS((2*PI*RMAX_X(INDEX)/WL)-(2*PI*TIME(1)/T))
IF (WHL>=0) THEND_LEF=CEILING(WHL)
ELSE D_LEF=FLOOR(WHL)
END IF
IF (WHR>=0) THEND_RIG=CEILING(WHR)
52
ELSE D_RIG=FLOOR(WHR)
END IF
IF (D_LEF<=RMIN_Y(INDEX) .AND. D_RIG<=RMIN_Y(INDEX))THEN
SCALE_VOL=0.00 ELSE IF (D_LEF>RMIN_Y(INDEX) .AND.
D_LEF<RMAX_Y(INDEX) .AND.1 D_RIG<RMIN_Y(INDEX)) THEN
SCALE_VOL=0.25 ELSE IF (D_LEF<RMIN_Y(INDEX) .AND.
D_RIG>RMIN_Y(INDEX) .AND.1 D_RIG<RMAX_Y(INDEX)) THEN
SCALE_VOL=0.25 ELSE IF (D_LEF>RMIN_Y(INDEX) .AND.
D_LEF<RMAX_Y(INDEX) .AND.1 D_RIG>RMIN_Y(INDEX) .AND. D_RIG<RMAX_Y(INDEX)) THEN
SCALE_VOL=0.50 ELSE IF (D_LEF>=RMAX_Y(INDEX) .AND.
D_RIG<RMIN_Y(INDEX)) THENSCALE_VOL=0.50
ELSE IF (D_LEF<RMIN_Y(INDEX) .AND.D_RIG>=RMAX_Y(INDEX)) THEN
SCALE_VOL=0.50 ELSE IF (D_LEF>=RMAX_Y(INDEX) .AND.
D_RIG>=RMIN_Y(INDEX) .AND.1 D_RIG<RMAX_Y(INDEX)) THEN
SCALE_VOL=0.75 ELSE IF (D_LEF>=RMIN_Y(INDEX) .AND.
D_LEF<RMAX_Y(INDEX) .AND.1 D_RIG>=RMAX_Y(INDEX)) THEN
SCALE_VOL=0.75 ELSE SCALE_VOL=1.00
END IF
F=DES*G*SCALE_VOL
RETURN END
53

APPENDIX B
SIMPLE BLOCK EXAMPLE
54
ABAQUS INPUT FILE:
*HeadingBlock is loaded with gravity, buoyancy, h-,v-pressuresover 18s ** Job name: block Model name: Model-1 *Preprint, echo=NO, model=NO, history=NO, contact=NO** ** PARTS ** *Part, name=Part-2*End Part ** ** ASSEMBLY ** *Assembly, name=Assembly** *Instance, name=Part-2-1, part=Part-2*Node
1, 2., 2., 2. 2, 2., 0., 2. 3, 2., 2., 0. 4, 2., 0., 0. 5, 0., 2., 2. 6, 0., 0., 2. 7, 0., 2., 0. 8, 0., 0., 0. 9, -2., 2., 2. 10, -2., 0., 2. 11, -2., 2., 0. 12, -2., 0., 0.
*Element, type=C3D8R1, 5, 6, 8, 7, 1, 2, 4, 3 2, 9, 10, 12, 11, 5, 6, 8, 7 ** Region: (block:Picked)*Elset, elset=_PickedSet2, internal1, 2** Section: block *Solid Section, elset=_PickedSet2, material="ElasticConcrete" 1.,*End Instance *Nset, nset=_PickedSet13, internal, instance=Part-2-1, generate
1, 12, 1 *Elset, elset=_PickedSet13, internal, instance=Part-2-11, 2
55
--------
*Nset, nset=_PickedSet15, internal, instance=Part-2-12, 4*Elset, elset=_PickedSet15, internal, instance=Part-2-11,*Nset, nset=_PickedSet16, internal, instance=Part-2-110, 12*Elset, elset=_PickedSet16, internal, instance=Part-2-12,*Nset, nset=_PickedSet20, internal, instance=Part-2-1, generate
1, 12, 1 *Elset, elset=_PickedSet20, internal, instance=Part-2-11, 2*Elset, elset=__PickedSurf22_S4, internal, instance=Part-2-1 1, 2*Surface, type=ELEMENT, name=_PickedSurf22, internal__PickedSurf22_S4, S4*Elset, elset=__PickedSurf23_S1, internal, instance=Part-2-1 2,*Surface, type=ELEMENT, name=_PickedSurf23, internal__PickedSurf23_S1, S1*End Assembly** ** MATERIALS ** *Material, name="Elastic Concrete"*Density150.,*Elastic 5.52096e+08, 0.21** ** BOUNDARY CONDITIONS ** ** Name: BC-1 Type: Displacement/Rotation*Boundary_PickedSet16, 1, 1_PickedSet16, 2, 2_PickedSet16, 6, 6** Name: BC-2 Type: Displacement/Rotation*Boundary_PickedSet15, 2, 2** --------------------------------------------------------
** ** STEP: load
56
** *Step, name=load*Dynamic,alpha=-0.05,direct,nohaf2.,6.,** ** LOADS ** ** Name: Buoyancy Type: Body force*Dload _PickedSet20, BYNU, 1.** Name: Gravity Type: Gravity*Dload _PickedSet13, GRAV, 1., 0., -1., 0.** Name: Horizontal Type: Pressure*Dsload _PickedSurf23, PNU, 1.** Name: Vertical Type: Pressure*Dsload _PickedSurf22, PNU, 1.** ** OUTPUT REQUESTS** *Restart, write, frequency=1** ** FIELD OUTPUT: F-Output-1** *Output, field, variable=PRESELECT, frequency=1** ** HISTORY OUTPUT: H-Output-1** *Output, history, variable=PRESELECT*El Print, freq=999999*Node Print, freq=999999*End Step
COMMON.H FILE:
PARAMETER(JSURFELEMENTS=2)PARAMETER(NUM_ELS=2)COMMON /SURF_ORIENT/1 LIST_EL(JSURFELEMENTS),1 PLANE_INFO(30,JSURFELEMENTS),1 LIST_EL2(NUM_ELS),1 RMIN_X(NUM_ELS), RMIN_Y(NUM_ELS),
RMIN_Z(NUM_ELS), 57
1 RMAX_X(NUM_ELS), RMAX_Y(NUM_ELS),RMAX_Z(NUM_ELS),
1 VOL(NUM_ELS),1 SCALE_X, SCALE_Y, AREA, WVELX, WVELY,1 DES, G, PI, D, H, WL, T, A1, A2, CD, CL, CS
PARAMETERS.DAT FILE:
1.900000E+00 32.400000E+00 3.141593E+00 16.000000E+00 16.000000E+00 409.000000E+00 18.000000E+00 1.000000E+00 1.000000E+00 1.000000E+00 1.000000E+00 1.000000E+00
ELEMENT.DAT FILE:
2 11 1
0.100000E+01 0.000000E+00 0.000000E+00 0.000000E+00 0.400000E+01
0.100000E+01 0.000000E+00 0.000000E+00 -0.200000E+01 0.400000E+01
0.000000E+00 -0.100000E+01 0.000000E+00 0.000000E+00 0.400000E+01
0.000000E+00 -0.100000E+01 0.000000E+00 0.200000E+01 0.400000E+01
0.000000E+00 0.000000E+00 0.100000E+01 -0.200000E+01 0.400000E+01
0.000000E+00 0.000000E+00 0.100000E+01 0.000000E+00 0.400000E+01
2 0.100000E+01 0.000000E+00 0.000000E+00 0.200000E+01
0.400000E+01 0.100000E+01 0.000000E+00 0.000000E+00 0.000000E+00
0.400000E+01 0.000000E+00 -0.100000E+01 0.000000E+00 0.000000E+00
0.400000E+01 0.000000E+00 -0.100000E+01 0.000000E+00 0.200000E+01
0.400000E+01 0.000000E+00 0.000000E+00 0.100000E+01 -0.200000E+01
0.400000E+01 0.000000E+00 0.000000E+00 0.100000E+01 0.000000E+00
0.400000E+01 58
2 1 0.0000E+00 0.2000E+01 0.0000E+00 0.2000E+01
0.0000E+00 0.2000E+01 0.8000E+01 2 -0.2000E+01 0.0000E+00 0.0000E+00 0.2000E+01
0.0000E+00 0.2000E+01 0.8000E+01
59

APPENDIX C
FIXED BRIDGE EXAMPLE
60

ABAQUS INPUT FILE:
Not included (1000+ pages), on CD.
COMMON.H FILE:
PARAMETER(JSURFELEMENTS=17672)PARAMETER(NUM_ELS=17672)COMMON /SURF_ORIENT/1 LIST_EL(JSURFELEMENTS),1 PLANE_INFO(30,JSURFELEMENTS),1 LIST_EL2(NUM_ELS),1 RMIN_X(NUM_ELS), RMIN_Y(NUM_ELS),
RMIN_Z(NUM_ELS),1 RMAX_X(NUM_ELS), RMAX_Y(NUM_ELS),
RMAX_Z(NUM_ELS),1 VOL(NUM_ELS),1 SCALE_X, SCALE_Y, AREA, WVELX, WVELY,1 DES, G, PI, D, H, WL, T, A1, A2, CD, CL, CS
PARMETERS.DAT FILE:
1.900000E+00 32.400000E+00 3.141593E+00 16.000000E+00 9.000000E+00 409.000000E+00 6.000000E+00 2.000000E+00 2.000000E+00 3.141593E+00
ELEMENT.DAT FILE:
Not included (2000+pages), on CD.
61

APPENDIX D
SIMPLY-SUPPORTED BRIDGE EXAMPLE
62

ABAQUS INPUT FILE:
Not included (1000+ pages), on CD
COMMON.H FILE:
PARAMETER(JSURFELEMENTS=17576)PARAMETER(NUM_ELS=17578)COMMON /SURF_ORIENT/1 LIST_EL(JSURFELEMENTS),1 PLANE_INFO(30,JSURFELEMENTS),1 LIST_EL2(NUM_ELS),1 RMIN_X(NUM_ELS), RMIN_Y(NUM_ELS),
RMIN_Z(NUM_ELS),1 RMAX_X(NUM_ELS), RMAX_Y(NUM_ELS),
RMAX_Z(NUM_ELS),1 VOL(NUM_ELS),1 SCALE_X, SCALE_Y, AREA, WVELX, WVELY,1 DES, G, PI, D, H, WL, T, A1, A2, CD, CL, CS
PARMETERS.DAT FILE:
1.900000E+00 32.400000E+00 3.141593E+00 16.000000E+00 9.000000E+00 409.000000E+00 6.000000E+00 2.000000E+00 2.000000E+00 3.141593E+00
ELEMENT.DAT FILE:
Not included (2000+pages), on CD
63
APPENDIX E
ABAQUS TUTORIAL
64
1. Open Terminal
2. Type Command: swsetup abaqus-6.5
3. Type Command: abaqus cae
4. In “Start Session” window, click on “Create Model Database”.
In Module: Part,
1. Click “Create Part”.
2. In “Create Part” window,
a. Name: type Beam
b. Modeling Space: 3D
c. Shape: Solid
d. Type: Extrusion
e. Approximate size: type 9.
f. Click on “Continue…”.
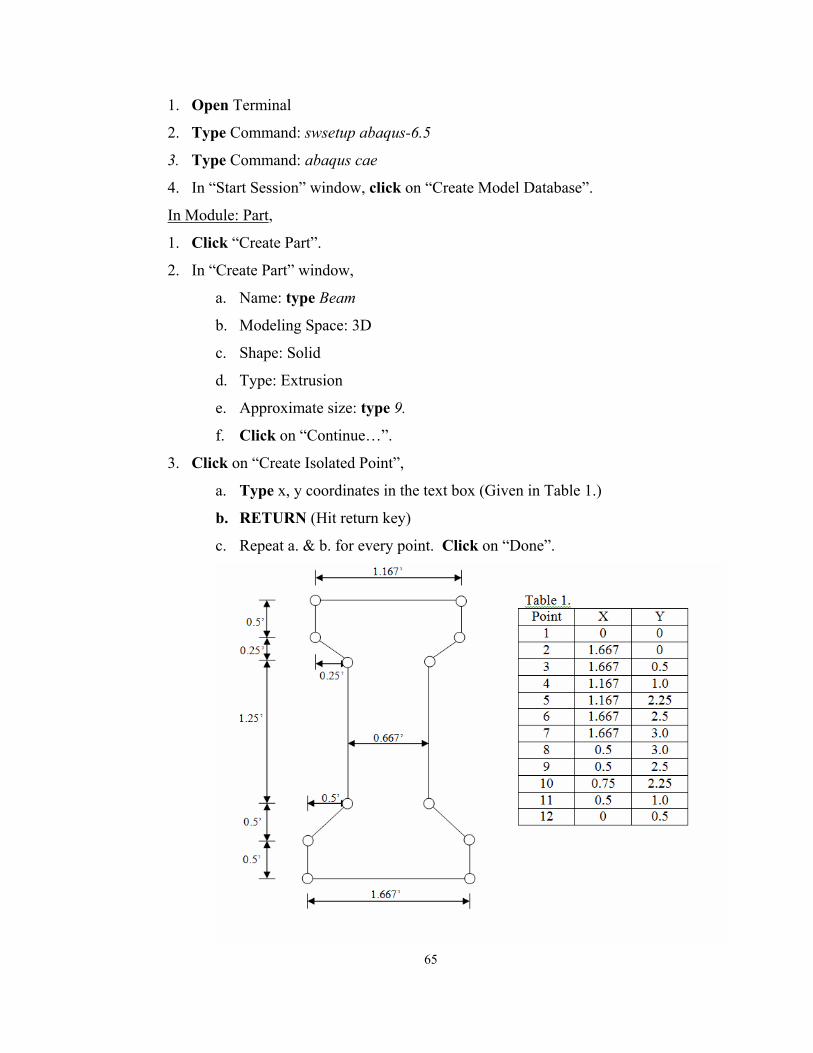
3. Click on “Create Isolated Point”,
a. Type x, y coordinates in the text box (Given in Table 1.)
b. RETURN (Hit return key)
c. Repeat a. & b. for every point. Click on “Done”.
65
4. Click on “Create Lines: Connected”, select the first point, then second until all
points are connected with a single line.
5. Click on “Done” Twice
6. In “Edit Base Extrusion”, choose
a. Type: Blind
b. Depth: type 16’
7. Click on “Ok”.
In Module: Property,
1. Click on “Create Material”
2. Name: type Concrete
3. Click on “General”,
a. Click on “Density”
b. Leave “Use temperature-dependent data” unchecked.
c. Leave “Number of field variables:” to O.
d. For “Mass Density”, Type 150 (lbs/ft2).
4. Click on “Mechanical”
a. Click on “Elasticity”
b. Click on “Elastic”
c. Leave Type: Isotropic
d. Leave “Use temperature-dependent data” unchecked
e. Leave “Number of field variables:” to O
f. Leave “Moduli time scale (for viscoelasticity):” long-term
g. For “Young’s Modulus”: Type 552096.E3 (lbs/ft2).
h. For “Poisson’s Ratio”: Type 0.21
i. Click on “OK”.
5. Click on “Create Section”,
a. Name: type Cross-Section
b. Category: Solid
c. Type: Homogeneous
d. Click on “Continue…”
6. In “Edit Section” window,
66
a. Select Concrete for “Material”.
b. Type 1 for “Plane stress/strain thickness”.
c. Click on “OK”
7. Click on “Assign Section”, notice in prompt area it says to “Select the regions to
be assigned a section”, click on the beam.….
8. Click on “Done”.
9. Click on “Ok”.
In Module: Assembly,
1. Click on “Instance Part”
2. Select Beam
3. Click on “OK” (notice that the beam is now blue this means the part is now a
instance)
In Module: Step,
1. Click on “Create Step”,
a. Name: Type Gravity
b. Insert new step after: Initial
c. Procedure type: General
d. Select “Static, General”
e. Click on “Continue…”
4. In “Edit Step” window, for description type Beam is loaded with it's own weight.
5. Click on “OK”.
6. Click on “Create Step”,
a. Name: Type Load
b. Insert new step after: Initial
c. Procedure type: General
d. Select “Static, General”
e. Click on “Continue…”
7. In “Edit Step” window, for description type Pressure is applied to bottom surface
of beam.
8. Click on “OK”.
67
In Module: Load,
1. Click on “Create Boundary Condition”
2. In “Create Boundary Condition” window,
a. Name: type Pinned.
b. Step: select Initial
c. Category: Mechanical
d. Types for Selected Step: Displacement/Rotation
e. Click on “Continue…”
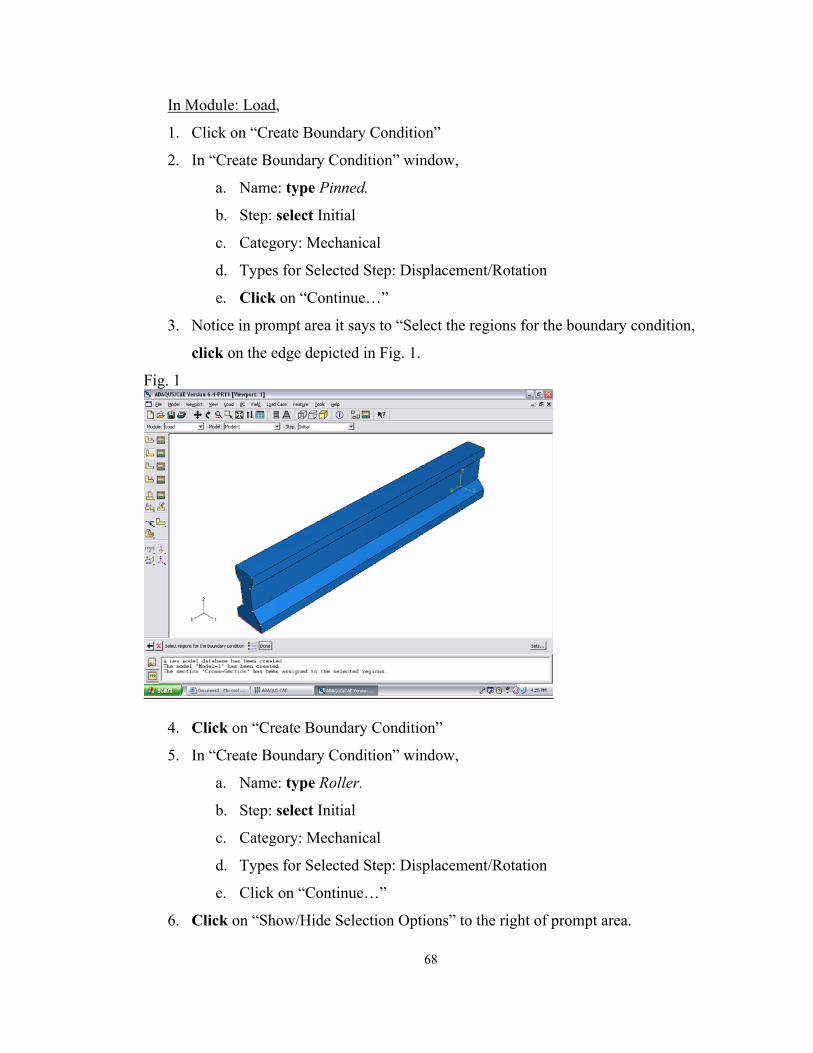
3. Notice in prompt area it says to “Select the regions for the boundary condition,
click on the edge depicted in Fig. 1.
Fig. 1
4. Click on “Create Boundary Condition”
5. In “Create Boundary Condition” window,
a. Name: type Roller.
b. Step: select Initial
c. Category: Mechanical
d. Types for Selected Step: Displacement/Rotation
e. Click on “Continue…”
6. Click on “Show/Hide Selection Options” to the right of prompt area.
68
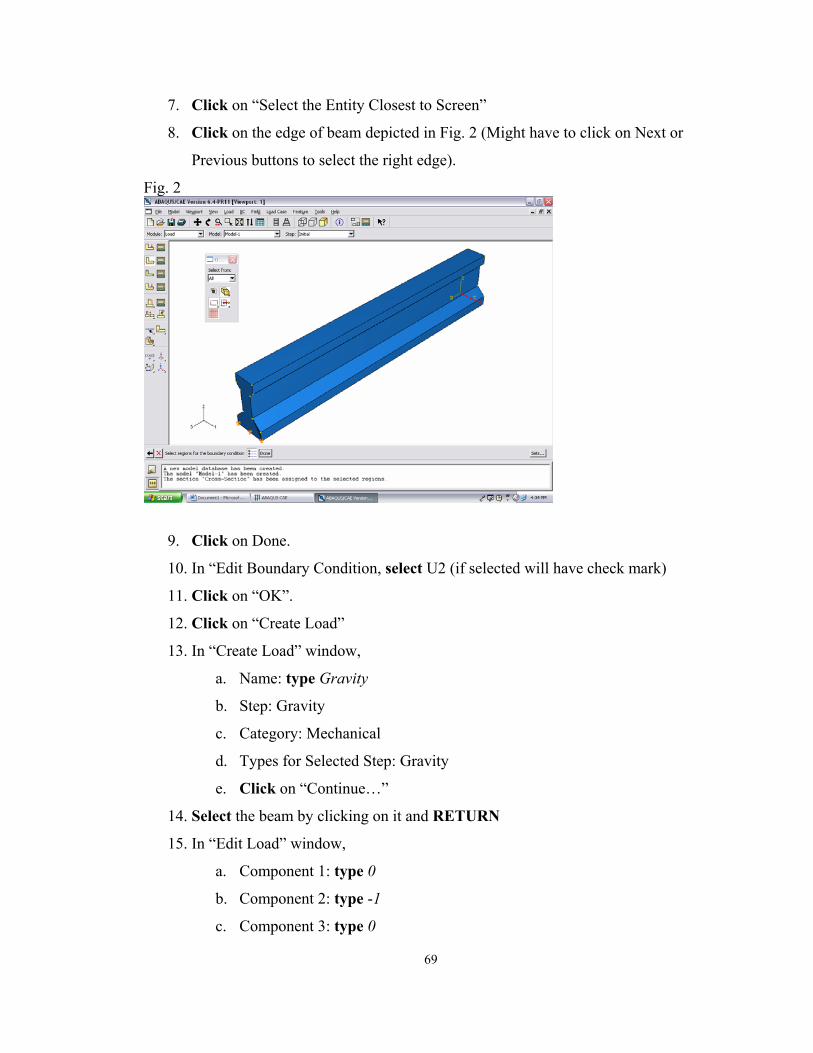
7. Click on “Select the Entity Closest to Screen”
8. Click on the edge of beam depicted in Fig. 2 (Might have to click on Next or
Previous buttons to select the right edge).
Fig. 2
9. Click on Done.
10. In “Edit Boundary Condition, select U2 (if selected will have check mark)
11. Click on “OK”.
12. Click on “Create Load”
13. In “Create Load” window,
a. Name: type Gravity
b. Step: Gravity
c. Category: Mechanical
d. Types for Selected Step: Gravity
e. Click on “Continue…”
14. Select the beam by clicking on it and RETURN
15. In “Edit Load” window,
a. Component 1: type 0
b. Component 2: type -1
c. Component 3: type 0
69
d. Amplitude: (Ramp)
e. Click on “OK”. (Yellow arrows pointing downward should appear)
16. Click on “Create Load”
17. In “Create Load” window,
a. Name: type Pressure
b. Step: Load
c. Category: Mechanical
d. Types for Selected Step: Pressure
e. Click on “Continue…”
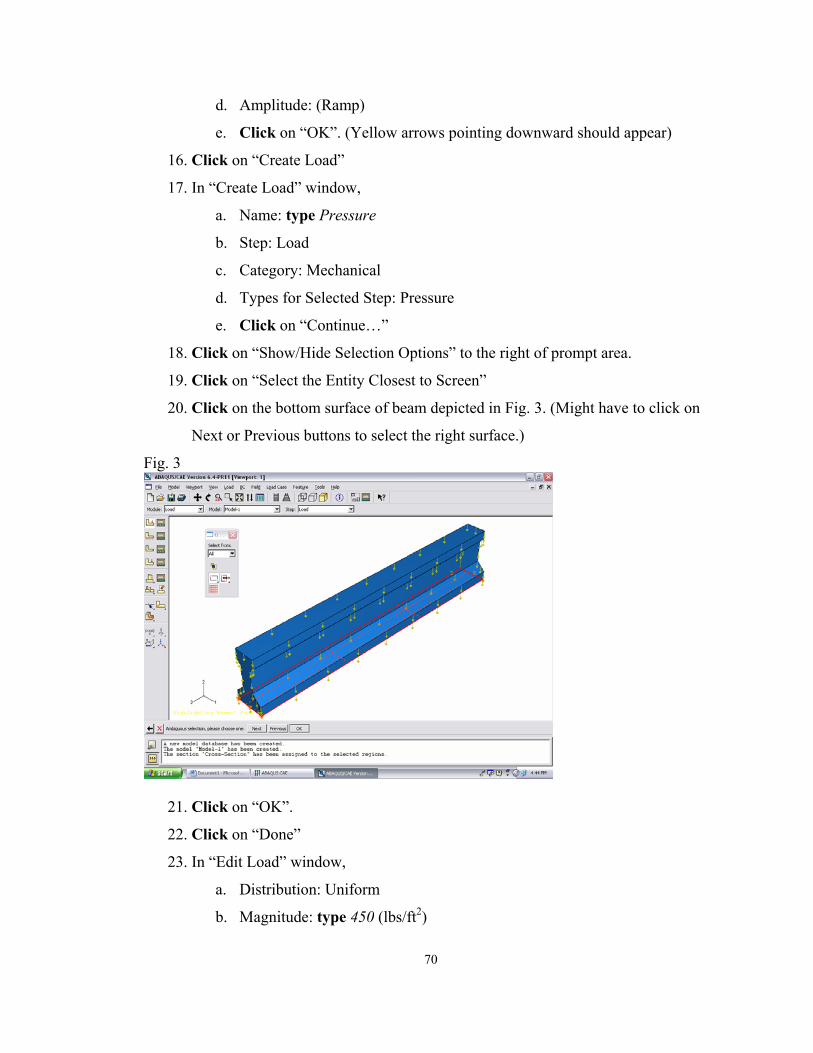
18. Click on “Show/Hide Selection Options” to the right of prompt area.
19. Click on “Select the Entity Closest to Screen”
20. Click on the bottom surface of beam depicted in Fig. 3. (Might have to click on
Next or Previous buttons to select the right surface.)
Fig. 3
21. Click on “OK”.
22. Click on “Done”
23. In “Edit Load” window,
a. Distribution: Uniform
b. Magnitude: type 450 (lbs/ft2)
70
c. Amplitude: (Ramp)
d. Click on “OK”
In Module: Mesh
Notice that beam is now yellow, therefore we must partition beam into smaller parts.
1. Click on “Tools” (in the main menu bar).
2. Click on “Datum”
3. In “Create Datum” window,
a. Select “Point”
b. Select “Offset from point”
c. Click on “Apply”
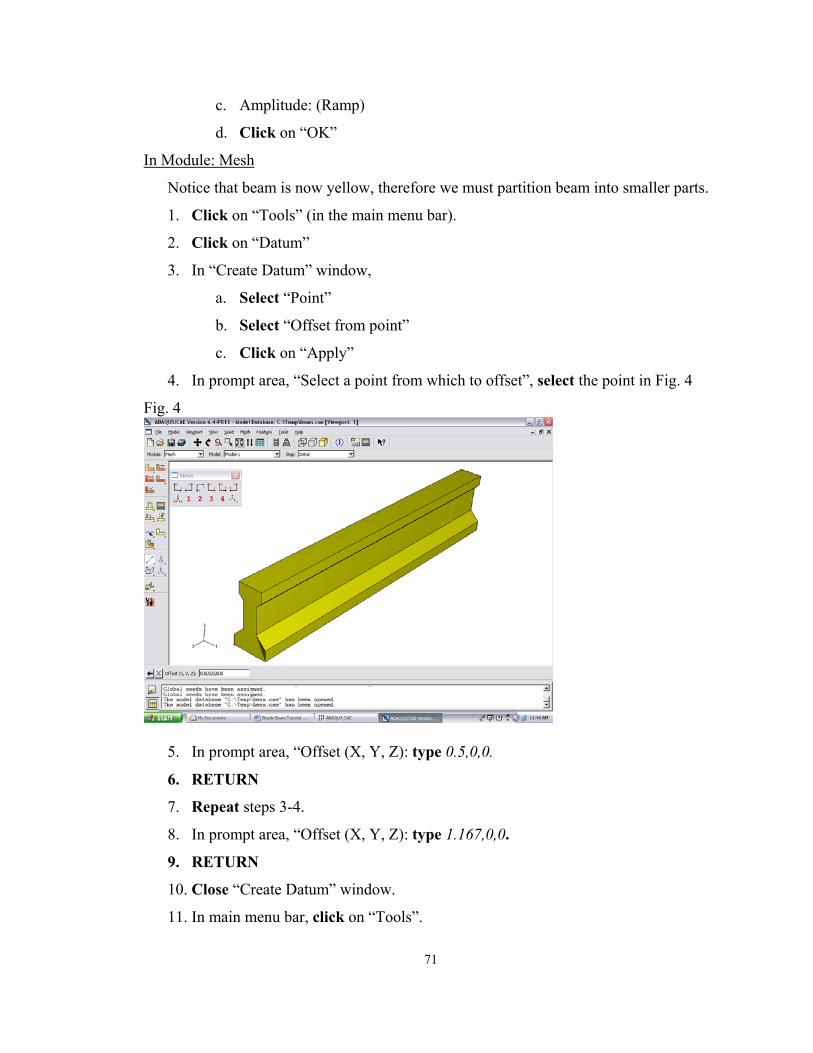
4. In prompt area, “Select a point from which to offset”, select the point in Fig. 4
Fig. 4
5. In prompt area, “Offset (X, Y, Z): type 0.5,0,0.
6. RETURN
7. Repeat steps 3-4.
8. In prompt area, “Offset (X, Y, Z): type 1.167,0,0.
9. RETURN
10. Close “Create Datum” window.
11. In main menu bar, click on “Tools”.
71
12. Click on “Partition”.
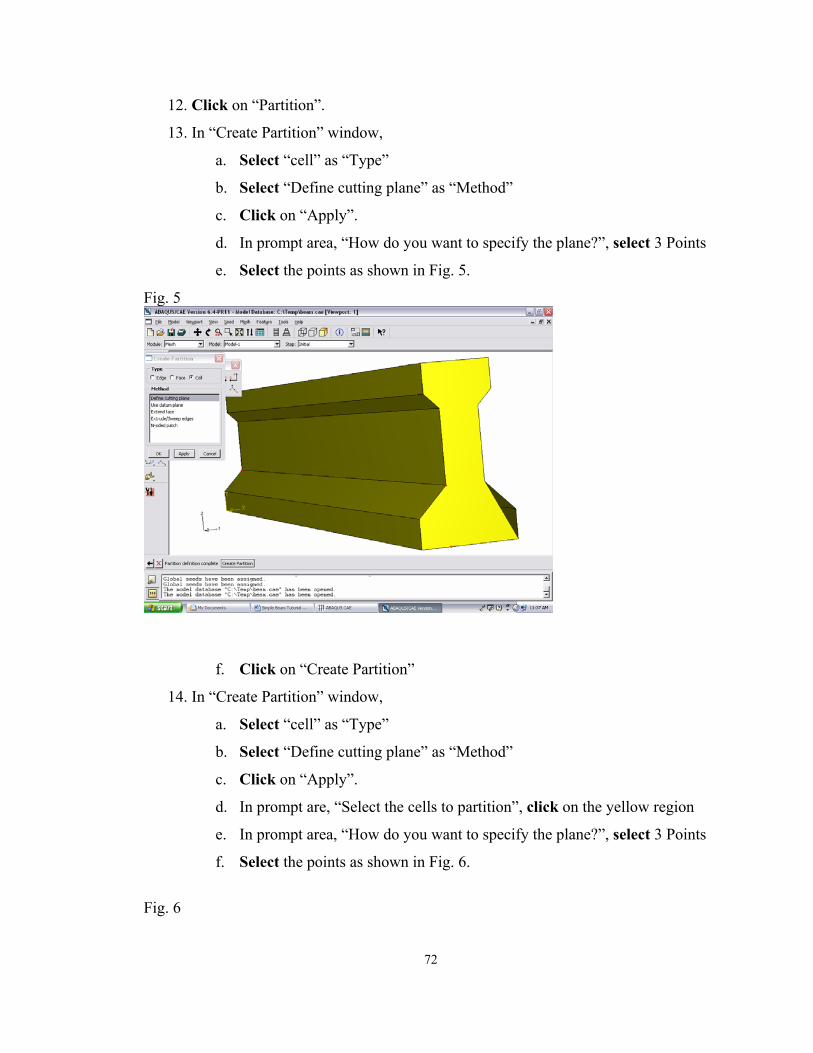
13. In “Create Partition” window,
a. Select “cell” as “Type”
b. Select “Define cutting plane” as “Method”
c. Click on “Apply”.
d. In prompt area, “How do you want to specify the plane?”, select 3 Points
e. Select the points as shown in Fig. 5.
Fig. 5
f. Click on “Create Partition”
14. In “Create Partition” window,
a. Select “cell” as “Type”
b. Select “Define cutting plane” as “Method”
c. Click on “Apply”.
d. In prompt are, “Select the cells to partition”, click on the yellow region
e. In prompt area, “How do you want to specify the plane?”, select 3 Points
f. Select the points as shown in Fig. 6.
Fig. 6
72
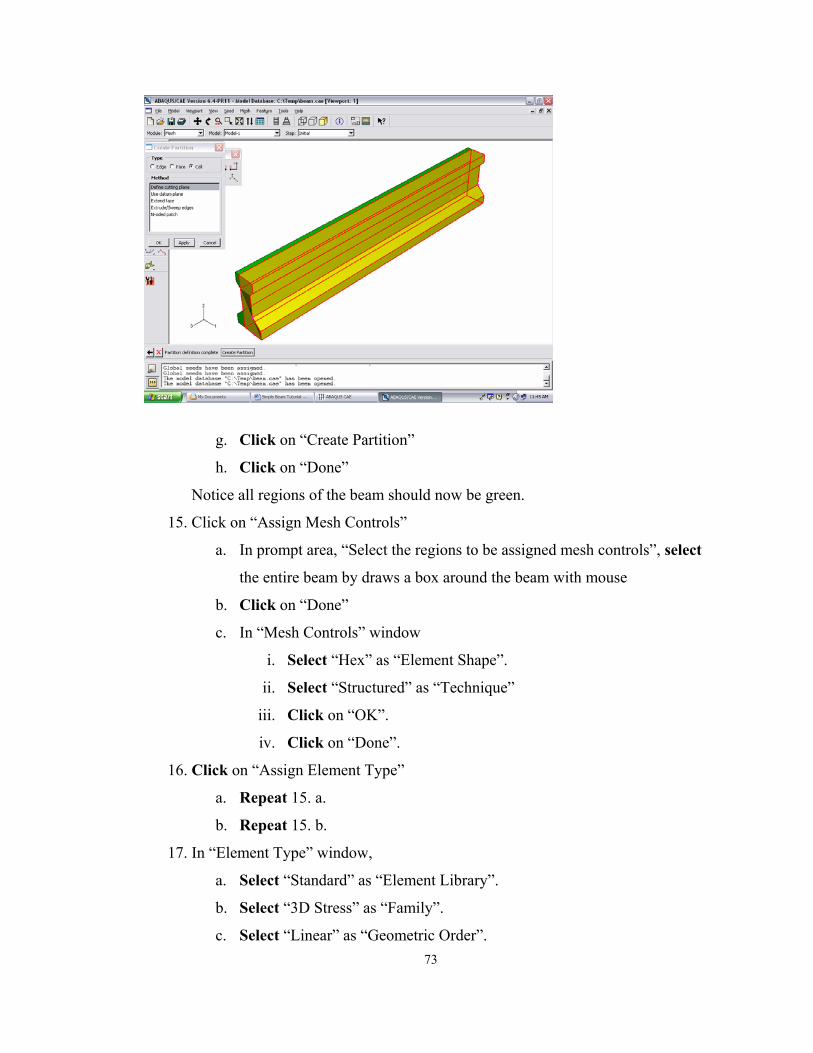
g. Click on “Create Partition”
h. Click on “Done”
Notice all regions of the beam should now be green.
15. Click on “Assign Mesh Controls”
a. In prompt area, “Select the regions to be assigned mesh controls”, select
the entire beam by draws a box around the beam with mouse
b. Click on “Done”
c. In “Mesh Controls” window
i. Select “Hex” as “Element Shape”.
ii. Select “Structured” as “Technique”
iii. Click on “OK”.
iv. Click on “Done”.
16. Click on “Assign Element Type”
a. Repeat 15. a.
b. Repeat 15. b.
17. In “Element Type” window,
a. Select “Standard” as “Element Library”.
b. Select “3D Stress” as “Family”.
c. Select “Linear” as “Geometric Order”. 73

d. Click on “Ok”
18. Click on “Seed Part Instance”
19. In prompt area, type 1 for “Global element size (approximate):”
20. RETURN
21. Click on “Mesh Part Instance”
22. Click on “Yes”.
23. Click on “Auto Fix View” icon to adjust view.
In Module: Job
1. Click on “Create Job”
2. In “Create Job” window,
a. Type Trail One for “Name”.
b. Select “Model-1’.
c. Click on “Continue…”
d. Type Structure is loaded with its own weight and a pressure.
e. Click on “OK”
3. Click on “Job Manger”
4. In “Job Manger” window, click on “Submit”.
5. When status is “Complete”, click on “Results”. *If errors occurred then status will
be “Aborted”, therefore must fix errors before clicking on “Results”.*
74

APPENDIX F
ABAQUS/WAVE FORCE STEPS
75
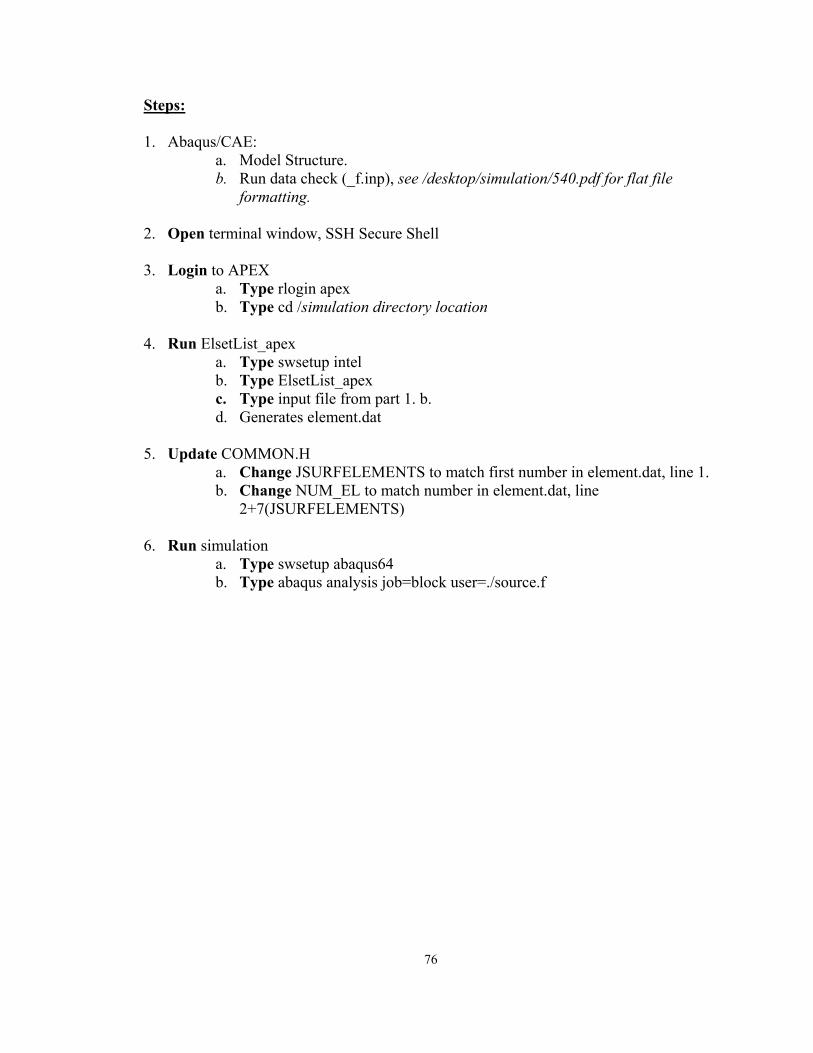
Steps:
1. Abaqus/CAE: a. Model Structure. b. Run data check (_f.inp), see /desktop/simulation/540.pdf for flat file
formatting.
2. Open terminal window, SSH Secure Shell
3. Login to APEX a. Type rlogin apex b. Type cd /simulation directory location
4. Run ElsetList_apex a. Type swsetup intel b. Type ElsetList_apex c. Type input file from part 1. b. d. Generates element.dat
5. Update COMMON.H a. Change JSURFELEMENTS to match first number in element.dat, line 1. b. Change NUM_EL to match number in element.dat, line
2+7(JSURFELEMENTS)
6. Run simulation a. Type swsetup abaqus64 b. Type abaqus analysis job=block user=./source.f
76