Embed Size (px)
Citation preview

J ElastDOI 10.1007/s10659-011-9333-6
Waves in Fractal Media
Paul N. Demmie · Martin Ostoja-Starzewski
Received: 11 December 2010© Springer Science+Business Media B.V. 2011
Abstract The term fractal was coined by Benoît Mandelbrot to denote an object that isbroken or fractured in space or time. Fractals provide appropriate models for many me-dia for some finite range of length scales with lower and upper cutoffs. Fractal geometricstructures with cutoffs are called pre-fractals. By fractal media, we mean media with pre-fractal geometric structures. The basis of this study is the recently formulated extensionof continuum thermomechanics to such media. The continuum theory is based on dimen-sional regularization, in which we employ fractional integrals to state global balance laws.The global forms of governing equations are cast in forms involving conventional (integer-order) integrals, while the local forms are expressed through partial differential equationswith derivatives of integer order. Using Hamilton’s principle, we derive the equations ofmotion of a fractal elastic solid under finite strains. Next, we consider one-dimensionalmodels and obtain equations governing nonlinear waves in such a solid. Finally, we studyshock fronts in linear viscoelastic solids under small strains. In all the cases, the derivedequations for fractal media depend explicitly on fractal dimensions and reduce to conven-tional forms for continuous media with Euclidean geometries upon setting the dimensionsto integers.
Keywords Fractals · Micromechanical theories · Elastic materials · Waves
Mathematics Subject Classification (2000) 28A80 · 74A60 · 74B99 · 74Jxx
Sandia National Laboratories is a multiprogram laboratory operated by Sandia Corporation, a LockheedMartin Company, for the United States Department of Energy under Contract DE-AC04-94AL85000.
P.N. DemmieSandia National Laboratories, Albuquerque, NM 87185, USAe-mail: [email protected]
M. Ostoja-Starzewski (�)Department of Mechanical Science & Engineering, Institute for Condensed Matter Theoryand Beckman Institute, University of Illinois at Urbana-Champaign, Urbana, IL 61801, USAe-mail: [email protected]

P.N. Demmie, M. Ostoja-Starzewski
1 Background and Basic Equations in a Fractal Media Setting
The term fractal was coined by Benoît Mandelbrot [1] to denote an object that is broken orfractured in space or time. A fractal object can be subdivided in parts, each of which is areduced-size copy of the whole in a deterministic or stochastic sense. This property is thefamous self-similarity property. Thus, mathematical fractals appear similar at all levels ofmagnification and, roughly speaking, are infinitely complex. Focusing on fractals in space,as opposed to those in time (signals, processes), many natural and man-made objects ap-proximate fractals to a degree, including coastlines, porous media, cracks, turbulent flows,clouds, mountains, lightning bolts, brains, snowflakes, melting ice, and other systems atphase transitions. The list is very long, and hence books like Fractals Everywhere [2] ap-pear in the literature. Mathematical fractals provide appropriate models for many media forsome finite range of length scales with lower and upper cutoffs. Such objects with lower andupper cutoffs are called pre-fractals.
Considerable research was performed in condensed matter physics [3] since the late1980’s for materials with fractal geometries. This work focused on physics, i.e., explainingphysical phenomena and properties for materials whose fractal (non-Euclidean) geometryplays a key role. However, a field theory, an analogue of continuum physics and mechanics,was sorely lacking. Some progress towards a field theory was made by mathematicians, whobegan to look at classical problems like Laplace’s or the heat equation on fractal sets. Thisapproach is very technical from the mathematical analysis standpoint and only begins tooffer an avenue to tackle simple mechanics problems.
A very different step in the direction of a field theory and problems was taken byTarasov [4–6]. He developed continuum-type equations of conservation of mass, linear andangular momentum, and energy for fractals, and studied several fluid mechanics and waveproblems. Tarasov’s approach relies on dimensional regularization of fractal objects throughfractional integrals in Euclidean space, a technique with its roots in quantum mechanics [7].Another advantage of this approach is that it admits upper and lower cutoffs of fractal scal-ing, so that one effectively deals with a physical pre-fractal rather than a purely mathematicalfractal lacking any cutoffs. In principle, one can then map a mechanics problem of a fractal,which is described by its mass and surface fractal dimensions and the spatial resolution,onto a problem in the Euclidean space in which this fractal is embedded. This mapping hasvery interesting ramifications for formulating continuum-type mechanics of fractal media,which need to be further explored. The great promise stems from the fact that the conven-tional requirement of continuum mechanics, the separation of scales, can be removed withcontinuum-type field equations still employed. The approach was applied, among others,to thermomechanics with internal variables, extremum principles of elasticity and plastic-ity, turbulence in fractal porous media, dynamics of fractal beams, fracture mechanics andthermoelasticity [8–12].
Whereas the original formulation of Tarasov was based on the Riesz measure, and thusmore suited to isotropic fractal media, a model that is based on a product measure wasintroduced by Li and Ostoja-Starzewski [11, 13]. Since this measure has different frac-tal dimensions in different directions, it grasps the anisotropy of fractal geometry bet-ter than the original formulation for a range of length scales between the lower and up-per cutoffs. As shown in [14, 15], this anisotropy leads to asymmetry of the stress ten-sor.
Before addressing waves in fractal media, we discuss this formalism in the followingfour sub-sections in order to make this paper self-contained. Some of the results in thesesub-sections are new. In Sect. 1.1, we discuss the mass power law for fractal media and frac-tional integrals; in Sect. 1.2, we introduce fractal derivatives through fractal generalizations

Waves in Fractal Media
of Gauss and Reynolds theorems; in Sect. 1.3, we discuss the homogenization interpreta-tion of the formalism for fractal media; and in Sect. 1.4, we develop continuum mechanicsfor fractal media. In Sect. 2, we investigate a fractal elastic solid under finite strains usingHamilton’s principle, and, in Sect. 3, focus on one-dimensional models and obtain equa-tions governing nonlinear waves in such a solid. We follow this investigation by consideringa shock front in a fractal linear viscoelastic solid in Sect. 4. Whenever possible, we searchfor a formula for the wave propagation speed in terms of three material properties: stiffness,mass density, and fractal dimension.
1.1 Mass Power Law and Fractional Integrals
By a fractal medium, we mean a medium with a pre-fractal geometric structure. In anisotropic fractal medium, the mass obeys a power law
m(R) ∼ RD, D < 3. (1.1)
Here R is the length scale of measurement (or resolution) and D is the fractal dimension ofmass. The relation (1.1) can be applied to a pre-fractal, i.e., a fractal-type, physical objectwith lower and upper cutoffs. In [4–6], Tarasov uses a fractional integral to represent massin a region W embedded in the Euclidean three space E
3
m(W) =∫
Wρ(r)dVD =
∫W
ρ(r)c3(D, r)dV3,
c3(D, r) = rD−323−D�(3/2)/�(D/2), r =√√√√ 3∑
i=1
(x2i )
(1.2)
where r is the position vector and � is the gamma function. The first and second equalitiesin (1.2), respectively, involve fractional (Riesz-type) integrals and conventional integrals. In(1.2) the coefficient c3(D, r) provides a transformation between the two [4–6]. dVD is theinfinitesimal volume element in fractal space, and dV3 is the infinitesimal volume elementin E
3. While (1.2) expresses the idea of dimensional regularization, this approach appliesonly to isotropic fractal media.
In order to deal with general anisotropic, fractal media, we replace (1.1) by a more gen-eral power law relation with respect to each coordinate [13]
m(x1, x2, x3) ∼ x1α1x2
α2x3α3 . (1.3)
Then, the mass is specified via a product measure
m(W) =∫
Wρ(x1, x2, x3)dlα1(x1)dlα2(x2)dlα3(x3). (1.4)
In (1.4), the length measure in each coordinate is provided using the transformation coeffi-cients c
(k)
1 by
dlαk(xk) = c
(k)
1 (αk, xk)dxk, k = 1,2,3 (no sum). (1.5)
Equation (1.3) implies that the mass fractal dimension D equals α1 + α2 + α3 along thediagonals, |x1| = |x2| = |x3|, where each αk plays the role of a fractal dimension in the

P.N. Demmie, M. Ostoja-Starzewski
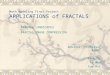
Fig. 1 Roles of the transformation coefficients c(i)1 , c
(k)2 , and c3 in homogenizing a fractal body of volume
dVD , surface dSd , and lengths dlα into a Euclidean parallelpiped of volume dV3, surface dS2, and length dx.The picture of a fractal representing the brain-neural system is courtesy of Andrea Yeomans (Fields Institute,Toronto)
direction xk . In other directions, the anisotropic fractal body’s fractal dimension is not nec-essarily the sum of projected fractal dimensions. However, as noted in [16], “Many fractalsencountered in practice are not actually products, but are product-like.” Hence, we expectthe equality between D and α1 + α2 + α3 to hold for fractals encountered in practice, al-though a rigorous proof remains a topic for further research.
Figure 1 illustrates the relationship among the transformation coefficients c(k)
1 and re-spective surface and volume transformation coefficients c
(k)
2 , and c3 which will be defined.We note that, when D → 3 with each αi → 1, the conventional concept of mass is recov-ered [17].
The relation (1.5) implies that the infinitesimal fractal volume element, dVD , is
dVD = dlα1(x1)dlα2(x2)dlα3(x3) = c(1)
1 c(2)
1 c(3)
1 dx1dx2dx3 = c3dV3,
with c3 = c(1)
1 c(2)
1 c(3)
1 . (1.6)
For the surface transformation coefficient c(k)
2 , we consider a cubic volume element,dV3 = dx1dx2dx3, whose surface elements are specified by the normal vector along axesi, j , or k in Fig. 1. Therefore, c
(k)
2 associated with the surface S(k)d is
c(k)
2 = c(i)
1 c(j)
1 = c3/c(k)
1 , i �= j, i, j �= k. (1.7)
The sum d(k) = αi +αj , i �= j, i, j �= k, is the fractal dimension of the surface S(k)d along the
diagonals |xi | = |xj | in S(k)d . This equality is not necessarily true elsewhere, but is expected

Waves in Fractal Media
to hold for fractals encountered in practice [16] as discussed previously for the relationshipbetween D and α1 + α2 + α3.
We adopt the modified Riemann-Liouville fractional integral of Jumarie [18, 19] for thetransformation coefficients c
(k)
1 ,
c(k)
1 = αk
(lk − xk
lk0
)αk−1
, k = 1,2,3 (no sum), (1.8)
where lk is the total length (integral interval) along xk and lk0 is the characteristic lengthin the given direction, like the mean pore size. In the product measure formulation, theresolution length scale is
R = √lklk. (1.9)
Here and elsewhere, the Einstein summation convention is used unless indicated otherwise.However, the Riesz fractional integral has a non-smooth transition of mass with respectto its fractal dimension. Expression (1.8) implies that the length dimension, and hence themass m, will involve an unusual physical dimension that follows from the fractional integral(1.4). This observation is reasonable since in mathematics a fractal curve exhibits only afinite measure with respect to a fractal dimensional length unit [1].
1.2 Fractional Integral Theorems and Fractal Derivatives
In order to develop continuum mechanics in a fractal media setting, we introduce the no-tion of fractal derivatives with respect to the coordinate xk and time t . The definitions ofthese derivatives follow naturally from the fractional generalization of two basic integraltheorems that are employed in continuum mechanics [13]: Gauss theorem, which relates avolume integral to the surface integral over its bounding surface, and the Reynolds transporttheorem, which provides an expression for the time rate of change of any volume integral ina continuous medium.
Consider the surface integral
∫∂W
f · ndSd =∫
∂WfknkdSd, (1.10)
where f(= fk) is any vector field and n(= nk) is the outward normal vector field to thesurface ∂W which is the boundary surface for some volume W , and dSd is the surfaceelement in fractal space. The notation (= Ak) is used to indicate that the Ak are componentsof the vector A.
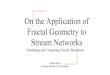
To compute (1.10), we relate the integral element ndSd to its conventional surface ele-ment ndS2 in E
3 via the fractal surface coefficients c(k)
2 , k = 1,2,3, as shown in Fig. 2. Thisfigure shows that the infinitesimal element ndSd can be expressed as a linear combinationof the nkc
(k)
2 dS2, k = 1,2,3 (no sum).By the conventional Gauss theorem, and noting that c
(k)
2 does not depend on the coordi-nate xk , (1.10) becomes
∫∂W
f · ndSd =∫
∂WfknkdSd =
∫W
[fkc(k)
2 ],k dV3 =∫
W
fk,k
c(k)
1
dVD. (1.11)

P.N. Demmie, M. Ostoja-Starzewski
Fig. 2 Cauchy’s tetrahedron ofa fractal body interpreted viaproduct measures
In (1.11) and elsewhere, we employ the usual convention that (·),k is the partial derivativeof (·) with respect to xk . Next, based on (1.11), we define the fractal derivative, ∇D
k as
∇Dk = 1
c(k)
1
∂
∂xk
(no sum). (1.12)
With this definition, the Gauss theorem for fractal media becomes
∫∂W
f · ndSd =∫
W∇D
k fkdVD =∫
W
(∇D · f)dVD. (1.13)
It is straightforward to show that the fractal operator, ∇Dk , commutes with the fractional
integral operator, is its inverse, and satisfies the product rule for differentiation (Leibnitzproperty). Furthermore, the fractal derivative of a constant is zero. This latter property showsthat a fractal derivative and a fractional derivative are not the same since the fractionalderivative of a constant does not always equal zero, neither in the fractional calculus [20]nor in Tarasov’s formulation [5].
To define the fractal material time derivative, we consider the fractional generalizationof Reynolds transport theorem. Consider any quantity, P , accompanied by a moving fractalmaterial system, Wt , with velocity vector field v(= vk). The time derivative of the volumeintegral of P over Wt is
d
dt
∫Wt
P dVD. (1.14)
Using the Jacobian (J ) of the transformation between the current configuration (xk) and thereference configuration (Xk), the relationship between the corresponding volume elements(dVD = JdV 0
D), and the expression for the time derivative of J , it is straightforward to showthat [13]
d
dt
∫Wt
P dVD =∫
Wt
[∂P
∂t+ (vkP ) ,k
]dVD
=∫
Wt
[∂P
∂t+ c
(k)
1 ∇Dk (vkP )
]dVD. (1.15)

Waves in Fractal Media
The result given by the first equality is identical to the conventional representation. Hence,the fractal material time derivative and the conventional material time derivative are thesame, (
d
dt
)D
P = ∂P
∂t+ vkP,k = ∂P
∂t+ c
(k)
1 vk∇Dk P . (1.16)
Equation (1.15) is a generalization of Reynolds theorem to fractal media. While this formof the theorem is similar to the conventional form, an alternative form of the fractionalReynolds transport theorem that involves surface integrals is different from the conventionalone and rather complicated. This difference results from the fractal volume coefficient c3
depending on all coordinates, whereas in the derivation of the fractional Gauss theorem,c
(k)
2 is independent of xk . This alternative form is developed in [13].
1.3 Homogenization Process for Fractal Media
The formula (1.4) for fractal mass expresses the mass power law using fractional integrals.From a homogenization standpoint, this relationship allows an interpretation of the fractalmedium as an intrinsically discontinuous continuum with a fractal metric embedded in theequivalent homogenized continuum model as shown in Fig. 1. In this figure, dlαi
, dSd , dVD
represent the line, surface, and volume elements in the fractal medium, while dxi , dS2, dV3,respectively, denote these elements in the homogenized continuum model. The coefficientsc
(i)
1 , c(k)
2 , c3 provide the relationship between the fractal medium and the homogenized con-tinuum model,
dlαi= c
(i)
1 dxi, dSd = c(k)
2 dS2, dVD = c3dV3 (no sum). (1.17)
Standard image analysis techniques (such as the “box method” or the “sausage method”)allow a quantitative calibration of these coefficients for every direction and every cross-sectional plane. In a non-fractal medium specified by D = 3 and d = 2, all the c coefficientsin (1.17) become unity, and one recovers conventional forms of the transport and balanceequation of continuum mechanics.
Li and Ostoja-Starzewski [13] showed that the presence of material anisotropy is re-flected by variations between the exponents, an aspect which leads to micropolar ef-fects [14]. Thus, the above equations should be augmented by the presence of couple-stresses and the angular balance equation.
1.4 Continuum Mechanics in a Fractal Media Setting
In Sects. 1.1, 1.2, and 1.3, we discussed product measures and fractional integrals, general-ized the Gauss and Reynolds theorems to fractal media, and introduced fractal derivatives.We now have the framework to develop continuum mechanics in a fractal setting. Here, thefield equations for fractal media will be formulated analogous to the field equations of clas-sical continuum mechanics, but will be based on fractional integrals and expressed in termsof fractal derivatives.
In light of the relationship discussed in Sect. 1.3 between fractal media and classicalcontinuum mechanics, the definitions of stress and strain are modified appropriately.
We specify the relationship between surface force, FS (= FSk ), and the Cauchy stress
tensor, σkl , using fractional integrals as
FSk =
∫S
σlknldSd, (1.18)

P.N. Demmie, M. Ostoja-Starzewski
where nl are the components of the outward normal n to S. From the relationship (1.17),this force becomes
FSk =
∫S
σlknldSd =∫
S
σlknlc(l)
2 dS2. (1.19)
To specify the strain, we observe using (1.17) and the definition of a fractal derivative(1.12) that
∂
∂lαk
= ∂xk
∂lαk
∂
∂xk
= 1
c(k)
1
∂
∂xk
= ∇Dk . (1.20)
Thus, for small deformations, we define the strain, εij , in terms of the displacement uk as
εij = 1
2
(∇Dj ui + ∇D
i uj
) = 1
2
[1
c(j)
1
ui,j + 1
c(i)
1
uj ,i
](no sum), (1.21)
with the last equality following from (1.12). As shown in [13], this definition of strain resultsin the same equations governing wave motion in linear elastic materials when derived by avariational approach as when derived by a mechanical approach.
The fractal equations for continuity, momentum, and energy follow from the balancelaws for mass, momentum, and energy.
Consider the equation for conservation of mass for W
d
dt
∫W
ρdVD = 0, (1.22)
where ρ is the density of the medium. Since the fractal and ordinary material time derivativesare the same, we normally use d/dt instead of (d/dt)D for convenience. Using the fractionalReynolds transport theorem (1.15), (1.22) implies
d
dt
∫W
ρdVD =∫
W
[∂ρ
∂t+ (vkρ) ,k
]dVD = 0, (1.23)
Since W is arbitrary,
∂ρ
∂t+ (vkρ) ,k = dρ
dt+ ρvk,k = 0, (1.24)
The fractal continuity equation follows from (1.24) when (1.24) is expressed in terms of thefractal derivative (1.12):
dρ
dt+ ρc
(k)
1 ∇Dk vk = 0, (1.25)
Consider the balance law of linear momentum for W ,
d
dt
∫W
ρvdVD = FB + FS, (1.26)
where FB is the body force, and FS is the surface force given by (1.18). In terms of thecomponents of velocity, vk , and body force density, bk , (1.26) can be written
d
dt
∫W
ρvkdVD =∫
WbkdVD +
∫∂W
σlknldSd . (1.27)

Waves in Fractal Media
Consider the left side of (1.27). Using the Reynolds transport theorem and the continuityequation (1.25), we obtain
d
dt
∫W
ρvkdVD =∫
W
[∂ρvk
∂t+ (vkvlρ) ,l
]dVD
=∫
Wρ
[∂vk
∂t+ vlvk,l
]dVD =
∫W
ρdvk
dtdVD. (1.28)
Next, (1.27), Gauss Theorem (1.13), and (1.28) imply
∫W
ρdvk
dtdVD =
∫W
bkdVD +∫
∂WσlknldSd =
∫W
bkdVD +∫
W∇D
l σlkdVD. (1.29)
The fractal linear momentum equation follows from (1.29) since W is arbitrary:
ρdvk
dt= bk + ∇D
l σlk. (1.30)
Note that if we replace the velocity in (1.28) with any quantity P , we obtain the moregeneral expression
d
dt
∫W
ρPdVD =∫
Wρ
dP
dtdVD, (1.31)
which is a useful result in continuum mechanics. This expression will be used in the deriva-tion of the fractal energy equation.
Since both mechanical and non-mechanical energies are to be considered, the most gen-eral form of balance (conservation) of energy must be used to obtain the fractal energyequation. In this form, the balance of energy is
The time rate of change of the kinetic energy plus the internal energy of a region,W , in a continuum equals the sum of the rate of work performed on W by externalagencies plus the flux of all other energies supplied to or removed from W by externalagencies across the boundary of W .
In terms of the density of the medium, ρ, the velocity v (= vi ), and the specific internalenergy, e, the respective kinetic energy, K, and internal energy, E , are
K = 1
2
∫W
ρvividVD E =∫
WρedVD, (1.32)
Using (1.31) and the equality of the fractal and ordinary material time derivatives, the timerate of change of the kinetic energy plus the internal energy is
dKdt
+ dEdt
= 1
2
∫W
ρd(vivi)
dtdVD +
∫W
ρde
dtdVD. (1.33)
The rate of work performed on W by external agencies, the surface force FS given by (1.19)and the body force FB given by (1.27) is
∫∂W
vkσlknldSd +∫
WvkbkdVD. (1.34)

P.N. Demmie, M. Ostoja-Starzewski
By Gauss theorem (1.13), (1.34) becomes
∫W
∇Dl (vkσlk)dVD +
∫W
vkbkdVD. (1.35)
In the present study, the flux of all other energies supplied to or removed from W by externalagencies across the boundary of W is specified by a heat flux, q (= qi ), at the boundary ofW . This heat flux includes thermal energy transfer by conduction, convection, and radiation.Then, the sum total of thermal energies supplied to or removed from the fractal medium is
−∫
∂WqinidSd . (1.36)
Using the Gauss theorem (1.13), (1.36) becomes
−∫
W∇D
i qidVD. (1.37)
Substituting (1.33), (1.35), and (1.37) into the energy balance equation stated above, weobtain
1
2
∫W
ρd(vivi)
dtdVD +
∫W
ρde
dtdVD
=∫
W∇D
l (vkσlk)dVD +∫
WvkbkdVD −
∫W
∇Di qidVD. (1.38)
Consider the first term in (1.38). Using the fractal linear momentum equation (1.30), thisterm becomes
1
2
∫W
ρd(vivi)
dtdVD =
∫W
ρvi
dvi
dtdVD =
∫W
ρvk
(bk + ∇D
l σlk
)dVD. (1.39)
Equations (1.38) and (1.39) imply
∫W
ρde
dtdVD =
∫W
σlk
(∇Dl vk
)dVD −
∫W
∇Di qidVD. (1.40)
The fractal energy equation follows from (1.40) since W is arbitrary:
ρde
dt= σlk
(∇Dl vk
) − ∇Di qi . (1.41)
The conservation of angular momentum in a fractal medium is stated as
d
dt
∫W
ρeijkxj vkdVD =∫
Weijkxj bkdVD +
∫∂W
eijkxjσlknldSd, (1.42)
where eijk is the permutation tensor. Using (1.30), (1.31), and Gauss theorem (1.13) on thelast term of (1.42), we obtain the fractal angular momentum equation
eijk
σjk
c(j)
1
= 0. (1.43)

Waves in Fractal Media
It was shown in [14] that the presence of material anisotropy is reflected by differences in thefractal dimensions αi in different directions, which implies that c
(j)
1 �= c(k)
1 , j �= k, in general.Therefore, the Cauchy stress is generally asymmetric in fractal media, suggesting that themicropolar effects should be accounted for and (1.42) should be augmented by the presenceof couple-stresses. However, since the present study primarily focuses on wave dynamics inone-dimensional, non-chiral media, couple-stress effects will not be considered here. Theprincipal difference between the form of the fractal energy equation and the conventionalenergy equation is that the first term on the right side of (1.41) is not 1
2σij (vi,j +vj ,i ) sincethe stress tensor may not be symmetric for fractal media.
The basic continuum equations for fractal media are (1.25), (1.30), and (1.41). Theseexpressions are 5 equations for 13 unknowns (3 for velocity, 9 for stress tensor, and 1 for thespecific internal energy) since the density, body force, and energy flux are properties of themedium or the external environment. To solve for the unknowns, constitutive relations mustbe specified. The specification of these relations involves the physics of the medium. Weexpect that the fractal geometry influences configurations of physical quantities like stressand strain, but does not affect the physical laws like conservation principles and constitutiverelations that are inherently due to material properties. This expectation is supported in [21],where scale effects of material strength and stress are discussed from the standpoint of fractalgeometry and confirmed by experiments involving both brittle and plastic materials.
2 Fractal Elastic Solid Under Finite Strains
To obtain the equations of motion for a fractal elastic solid under finite strains, we beginwith Hamilton’s Principle for the Lagrangian L = K − E of a fractal solid W isolated fromexternal interactions,
δI = δ
∫ t2
t1
[K − E ]dt = 0, (2.1)
where K and E are the kinetic and internal energies given in (1.32). Thus, we have a func-tional, which can be rewritten in fractal space-time (e being the specific, per unit mass,internal energy density) as
0 = δI = δ
∫ t2
t1
∫W
[1
2ρv2
k − ρe
]dVDdt = δ
∫ t2
t1
∫W
[ρ
1
2v2
k − ρe
]dVDdt. (2.2)
By entering the variation into the integrand, we obtain
0 =∫ t2
t1
∫W
[ρvkδvk − ρδe]dVDdt. (2.3)
Note that
vk(X, t) = dxk(X, t)
dt
∣∣∣∣X=const
implies δvk = d
dt(δxk(X, t)) . (2.4)
Also, analogous to the strain of (1.21), the deformation gradient is
FkI = 1
c(I)
1
xk,I = ∇DI xk. (2.5)

P.N. Demmie, M. Ostoja-Starzewski
Assuming that the specific energy density e depends only on the deformation gradient, wefind
∫ t2
t1
∫W
[ρvkδvk − ρδe]dVDdt =∫ t2
t1
∫W
[ρvk
d
dt(δxk) − ρ
∂e
∂FkI
δ(FkI )
]dVDdt. (2.6)
Integration by parts (with respect to time) of the first term on the right hand side in (2.6) andassuming ρ has no explicit dependence on time for the fractal elastic solid gives
∫ t2
t1
∫W
[ρvk
d
dt(δxk)
]dVDdt =
∫W
[ρvkδxk]|t2t1dVD −∫ t2
t1
∫W
[ρ
dvk
dtδxk
]dVDdt. (2.7)
Integration by parts (with respect to space) of the second term on the right hand side in (2.6)gives
∫ t2
t1
∫W
[ρ
∂e
∂FkI
δFkI
]dVDdt
=∫ t2
t1
∫W
[ρ
∂e
∂FkI
δ(∇D
I xk
)]dVDdt
=∫ t2
t1
∫W
[∇D
I
(ρ
∂e
∂FkI
δxk
)]dVDdt −
∫ t2
t1
∫W
[∇D
I
(ρ
∂e
∂FkI
)δxk
]dVDdt
=∫ t2
t1
∫∂W
[ρ
∂e
∂FkI
δxkNI
]dSddt −
∫ t2
t1
∫W
[∇D
I
(ρ
∂e
∂FkI
)δxk
]dVDdt. (2.8)
In (2.8) we used
δ (FkI ) = δ(∇D
I xk
) = ∇DI (δxk), (2.9)
with the latter equality following from the c(I)
1 depending on the position XI in the referenceconfiguration that does not change under variations δ.
The boundary conditions on ∂W
ρ∂e
∂FkI
NI = 0 or δxk = 0 on ∂W, (2.10)
and the kinematic constraints, δxk = 0 at t = t1 and t = t2 imply, with (1.12) in materialcoordinates,
δI =∫ t2
t1
∫W
{∇D
I
[ρ
∂e
∂FkI
]− ρ
dvk
dt
}δxkdVDdt = 0. (2.11)
Since (2.11) must hold for arbitrary variations δxk , the integrand must satisfy
∇DI
[ρ
∂e
∂FkI
]− ρ
dvk
dt= 0 or
1
c(I)
1
∂
∂XI
[ρ
∂e
∂FkI
]− ρ
dvk
dt= 0, (2.12)
which is the equation governing motion in a fractal solid under finite strains.In fractal bodies without internal dissipation, e plays the role of a potential
TkI = ρ∂e
∂FkI
, (2.13)

Waves in Fractal Media
where TkI is the first Piola-Kirchhoff stress tensor. In terms of this potential, (2.12) becomes
∇DI TkI − ρ
dvk
dt= 0 or
1
c(I)
1
TkI ,I −ρdvk
dt= 0. (2.14)
If we restrict the motion to small deformation gradients, then TkI becomes the Cauchy stresstensor and we recover the linear momentum equation (1.30).
Following the ideas of continuum mechanics of non-fractal bodies, we can generalize(2.1) to the situation of W interacting with the environment (i.e., subject to body forces) [22],
δ (I + W − P) = 0, (2.15)
where
δW =∫ t2
t1
∫W
[ρbkδxk]dVDdt +∫ t2
t1
∫∂W
[ρσlknlδxk]dSddt, (2.16)
δP =∫
W[ρvkδxk]dVD|t2t1 . (2.17)
Now, in place of (2.14), we obtain
∇DI TkI + ρ
(bk − dvk
dt
)= 0 or
1
c(I)
1
TkI ,I +ρ
(bk − dvk
dt
)= 0. (2.18)
3 Nonlinear Waves in a Fractal Elastic Solid
We consider the motion of a one-dimensional, nonlinear elastic body in the material descrip-tion. According to the prescription that every spatial gradient ∇k be replaced by the fractalderivative ∇D = (c1)
−1∂/∂X, the deformation gradient is
F = 1
c1
∂x(X, t)
∂X. (3.1)
where the superscript on the homogenization coefficient c1 has been suppressed for one-dimensional motion. Differentiating (3.1) with respect to time gives
∂F
∂t− 1
c1
∂v
∂X= 0 which implies
∂F
∂t− ∂v
∂lα= 0, (3.2)
since dlα = c1dX in one dimension.On the other hand, adopting the stress S in material description as the function of F , the
equation of motion becomes
ρ∂v
∂t= 1
c1
∂S(F )
∂F
∂F
∂X= 1
c1E
∂F
∂Xwhere E = ∂S(F )
∂F. (3.3)
Therefore,
∂v
∂t− E
ρc1
∂F
∂X= 0 which implies
∂v
∂t− E
ρ
∂F
∂lα= 0. (3.4)

P.N. Demmie, M. Ostoja-Starzewski
Clearly, (3.2) and (3.4) form a system of two quasi-linear hyperbolic equations for F andv in the (lα, t)-plane. The set of all (lα, t) is called the fractal space-time F
1 × T, since it isa Cartesian product of fractal spatial domain, F
1, and time, T. The characteristic curves inthe (lα, t)-plane are
dlα
dt= ±C, (3.5)
where the propagation speed in F1 × T is
C =√
E
ρ. (3.6)
In the case of a linear elastic material, E is Young’s modulus and C is the well-known wavespeed.
The lines in the (lα, t)-plane defined by (3.5) are referred to as the C+ and C− character-istics, respectively. Upon introducing the new coordinates
ξ = const along C+ curves,
η = const along C− curves,(3.7)
we have
∂lα
∂η= C(F)
∂t
∂ηalong C+ curves,
∂lα
∂ξ= −C(F)
∂t
∂ξalong C− curves.
(3.8)
By following the usual steps which involve defining Q(F) = ∫ F
F0C(F)dF , we arrive at the
pair of equations
∂v
∂η− ∂Q
∂η= 0 along C+ curves,
∂v
∂ξ+ ∂Q
∂ξ= 0 along C− curves.
(3.9)
Integrating (3.9) yields equations for the Riemann invariants g1(ξ) and g2(η):
v(ξ, η) − Q(ξ,η) = g1(ξ) along C+ curves,
v(ξ, η) + Q(ξ,η) = g2(η) along C− curves.(3.10)
In effect, the characteristics are curving in fractal space-time F1 × T. Thus, the problem of
transient nonlinear wave propagation may first be solved numerically in the fractal space-time, and then mapped back to the Euclidean space E
1 × T via dimensional regularization.
4 Shock Front in a Fractal Linear Viscoelastic Solid
We now consider shock fronts (singular surfaces of order one) in viscoelastic fractal solidsunder infinitesimal strains. It follows from (1.30), with the stress σ(= σxx) and the dis-

Waves in Fractal Media
placement u(= ux) in one dimension, that the motion in a fractal rod W embedded in theone-dimensional Euclidean space E
1 (direction x = x1) is governed by
1
c1σ,x = ρu,tt , (4.1)
where (·),t denotes a partial time derivative of (·). The rod has a constant, non-fractal cross-section A, and a fractal structure in x1 characterized by α = α1, and mass density ρ.
We assume that the shock wavefront propagates from a domain 1 (disturbed) to a do-main 2 (undisturbed) with a speed C to be determined. The initial conditions are (i) the rodis at rest at time t = 0 and (ii) the stress is suddenly applied at x = 0,
u(x,0) = u,t (x,0) = 0, σ (0, t) = −σ0H(t), (4.2)
where H is the Heaviside function.The dynamic compatibility condition is established from the relation between the impulse
(force, F, times change in time, �t ) and the momentum change for a mass (ρ�VD)
F�t = �(mu,t ), (4.3)
applied to the element of W with volume �VD = Adlα in the limit �t → 0. Since, themotion is in one dimension and �VD = AC�t , (4.3) becomes
[(σ )2 − (σ )1
]A�t = ρ�VD
[(u,t )1 − (u,t )2
] = ρAC�t[(u,t )1 − (u,t )2
]. (4.4)
Equation (4.4) implies that
[[σ ]] = −ρC[[u,t ]] in (lα, t)-plane, (4.5)
where [[ψ]] denotes the discontinuity in ψ across the boundary of domains 1 and 2.The linear viscoelastic stress-strain relation for a process that started at time t = t+0 is
σ(t) = E(0)ε(t) +∫ t
t+0E,t (t − s)ε(s)ds = E(0)
1
c1u,x (t) +
∫ t
t+0E,t (t − s)
1
c1u,x (s)ds,
(4.6)
where E(t) is the relaxation function (which should not be confused with E in Sect. 3) andε = u,x /c1. (4.6) implies
[[σ ]] = E(0)
[[∂u
∂lα
]]in (lα, t)-plane. (4.7)
Henceforth, we work in the (lα, t)-plane. Since the derivative of u for an observer travel-ing with the wavefront is [23]
dT
dt[[u]] = [[u,t ]] + C
[[∂u
∂lα
]], (4.8)
the continuity of displacement implies the kinematic compatibility condition
[[u,t ]] = −C
[[∂u
∂lα
]]. (4.9)

P.N. Demmie, M. Ostoja-Starzewski
From the relations (4.5), (4.7) and (4.9), we obtain the propagation speed in terms of twomaterial properties
C =√
E(0)
ρ. (4.10)
Next, we examine the evolution of the shock wavefront. First, recall the derivative of σ
for an observer traveling with the wavefront
dT
dt[[σ ]] = [[σ,t ]] + C
[[∂σ
∂lα
]]. (4.11)
In view of (4.6), we have
∂σ
∂t= E(0)
∂2u
∂t∂lα+ E,t (0)
∂u
∂lα+
∫ t
t+0E,ts (t − s)
∂u
∂lαds. (4.12)
Hence, the discontinuities are related as follows
[[σ,t ]] = E(0)
[[∂2u
∂t∂lα
]]+ E,t (0)
[[∂u
∂lα
]]. (4.13)
The equation of motion (4.1) implies
[[∂σ
∂lα
]]= ρ[[u,tt ]]. (4.14)
On the other hand, the derivative of u,t for an observer traveling with the wavefront is
dT
dt[[u,t ]] = [[u,tt ]] + C
[[∂2u
∂t∂lα
]]. (4.15)
Substituting (4.5) and (4.14) in (4.15) implies
dT
dt[[σ ]] = −C
[[∂σ
∂lα
]]− ρC2
[[∂2u
∂t∂lα
]]. (4.16)
Using (4.7), (4.11), and (4.13) in (4.16), we obtain the equation governing the evolution of[[σ ]] at the wavefront
dT
dt[[σ ]] = 1
2
E,t (0)
E(0)[[σ ]]. (4.17)
Given the initial condition (4.2), the solution to (4.17) is
[[σ ]] = σ0 exp
{1
2
E,t (0)
E(0)t
}. (4.18)
This solution is the same as the solution for the classical (non-fractal) body, which holds inthe conventional (x, t)-plane [20].

Waves in Fractal Media
5 Closing Remarks
Fractals provide appropriate models for many media for some finite range of length scaleswith lower and upper cutoffs. Fractal geometric structures with cutoffs are called pre-fractals. By fractal media, we mean media with pre-fractal geometric structures. The basis ofthis study is the recently formulated extension of continuum thermomechanics to such me-dia which are specified by a mass (or spatial) fractal dimension, a surface fractal dimension,and a resolution length scale. The continuum theory is based on dimensional regulariza-tion, in which we employ fractional integrals to state global balance laws. The global formsof governing equations are cast in forms involving conventional (integer-order) integrals,while the local forms are expressed through partial differential equations with derivativesof integer order. We developed fractal continuity, linear momentum, and energy equations,which through dimensional regularization can be cast into equations in E
3. Furthermore, weshowed that the Cauchy stress tensor is, in general, not symmetric in fractal media. UsingHamilton’s principle, we obtained the equations of motion of a fractal elastic solid under-going finite strains. Next, we focused on one-dimensional models and obtained equationsgoverning the nonlinear waves in such a solid. We showed that the equations can be solvedby the method of characteristics in fractal space-time. Finally, we studied shock fronts inlinear viscoelastic solids under small strains. We showed that the discontinuity in stressacross a shock front in a fractal medium is identical to the classical result. In all the cases,the derived equations for fractal media depend explicitly on fractal dimensions and, uponsetting them to integers, they reduce to conventional forms for continuous media with Eu-clidean geometries upon setting the dimensions to integers. While this paper focuses onnew equations, especially in nonlinear settings, more quantitative analyses relating to wavepropagation in three-dimensional linear elastic fractal media have recently been carried outthrough analytical and computational means in [24].
Acknowledgements Comments of an anonymous referee helped improve this paper. This research wasmade possible by the support from Sandia-DTRA (grant HDTRA1-08-10-BRCWMD) and the NSF (grantCMMI-1030940).
References
1. Mandelbrot, B.: The Fractal Geometry of Nature. Freeman, New York (1982)2. Barnsley, M.F.: Fractals Everywhere. Morgan Kaufmann, San Mateo (1993)3. Feder, J.: Fractals (Physics of Solids and Liquids). Springer, Berlin (2007)4. Tarasov, V.E.: Continuous medium model for fractal media. Phys. Lett. A 336, 167–174 (2005)5. Tarasov, V.E.: Fractional hydrodynamic equations for fractal media. Ann. Phys. 318(2), 286–307 (2005)6. Tarasov, V.E.: Wave equation for fractal solid string. Mod. Phys. Lett. B 19(15), 721–728 (2005)7. Collins, J.C.: Renormalization. Cambridge University Press, Cambridge (1984)8. Ostoja-Starzewski, M.: Towards thermomechanics of fractal media. Z. Angew. Math. Phys. 58(6), 1085–
1096 (2007)9. Ostoja-Starzewski, M.: Extremum and variational principles for elastic and inelastic media with fractal
geometries. Acta Mech. 205, 161–170 (2009)10. Ostoja-Starzewski, M.: On turbulence in fractal porous media. Z. Angew. Math. Phys. 59(6), 1111–1117
(2008)11. Li, J., Ostoja-Starzewski, M.: Fractal materials, beams and fracture mechanics. Z. Angew. Math. Phys.
60, 1–12 (2009)12. Ignaczak, J., Ostoja-Starzewski, M.: Thermoelasticity with Finite Wave Speeds. Oxford University Press,
London (2009)13. Li, J., Ostoja-Starzewski, M.: Fractal solids, product measures and fractional wave equations. Proc. R.
Soc. A 465, 2521–2536 (2009). doi:10.1098/rspa.2009.0101. Errata (2010) doi:10.1098/rspa.2010.0491

P.N. Demmie, M. Ostoja-Starzewski
14. Li, J., Ostoja-Starzewski, M.: Fractal solids, product measures and continuum mechanics. In: Maugin,G.A., Metrikine, A.V. (eds.) Mechanics of Generalized Continua: One Hundred Years After the Cosser-ats, pp. 315–323. Springer, Berlin (2010). Chap. 33
15. Li, J., Ostoja-Starzewski, M.: Micropolar continuum mechanics of fractal media. Int. J. Eng. Sci. (A.C.Eringen special issue) (2011, to appear)
16. Falconer, K.: Fractal Geometry: Mathematical Foundations and Applications. Wiley, New York (2003)17. Temam, R., Miranville, A.: Mathematical Modeling in Continuum Mechanics. Cambridge University
Press, Cambridge (2005)18. Jumarie, G.: On the representation of fractional Brownian motion as an integral with respect to (dt)a .
Appl. Math. Lett. 18, 739–748 (2005)19. Jumarie, G.: Table of some basic fractional calculus formulae derived from a modified Riemann-
Liouville derivative for non-differentiable functions. Appl. Math. Lett. 22(3), 378–385 (2009)20. Oldham, K.B., Spanier, J.: The Fractional Calculus. Academic Press, San Diego (1974)21. Carpinteri, A., Pugno, N.: Are scaling laws on strength of solids related to mechanics or to geometry?
Nat. Mater. 4, 421–23 (2005)22. Rymarz, C.: Mechanics of Continuous Media. PWN, Warsaw (1993)23. Achenbach, J.D.: Wave Propagation in Elastic Solids. North-Holland, Amsterdam (1973)24. Joumaa, H., Ostoja-Starzewski, M.: On the wave propagation in isotropic fractal media. Z. Angew. Math.
Phys. (2011, to appear)