Embed Size (px)
Citation preview

WEEK 4Dynamics of Machinery
• References Theory of Machines and Mechanisms, J.J.Uicker,
G.R.Pennock ve J.E. Shigley, 2003
Prof.Dr.Hasan ÖZTÜRK 1

Prof.Dr.Hasan ÖZTÜRK
2
DYNAMICS OF RECIPROCATING ENGINESThe Otto-cycle engine uses quite volatile fuels and ignition is by spark, but the Diesel-cycle engine operates on fuels of lower volatility and ignition occurs because of compression.

Prof.Dr.Hasan ÖZTÜRK 3
In-Line EnginesV Engines

Prof.Dr.Hasan ÖZTÜRK 4
ENGINE DYNAMICS
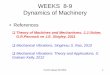
Four bar sllder-crankmechanism for Single-cyllnderInternal combustion engine
In the internal combustion engine of the above Figure, it should be fairly obvious that at most we can only expect energy to be delivered from the exploding gases to the crank during the power stroke of the cycle. The piston must return from bottom dead center (BDC) to top dead center (TDC) on its own momentum before it can receive another push from the next explosion. In fact, some rotational kinetic energy must be stored in the crankshaft merely to carry it through the TDC and BDC points as the moment arm for the gas force at those points is zero. This is why an internal combustion engine must be "spun-up" with a hand crank, pull rope, or starter motor to get it running.
DYNAMICS OF RECIPROCATING ENGINES

Prof.Dr.Hasan ÖZTÜRK5
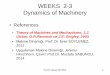
FOUR-STROKE CYCLE: The Otto four-stroke cycle is shown in theFigure. It takes four full strokes of the piston to complete one Otto cycle. A piston stroke is defined as its travel from TDC to BDC or the reverse.Thus there are two strokes per 3600
crank revolution and it takes 7200 of crankshaft rotation to complete one four-stroke cycle. This enginerequires at least two valves percylinder, one for intake and one forexhaust

Prof.Dr.Hasan ÖZTÜRK 6
The intake stroke starts with the piston at TDC. A mixture of fuel and air is drawn into the cylinder from the induction system as the piston descends to BDC.
During the compression stroke , all valves are closed and the gas iscompressed as the piston travels from BDC to TDC.
The pressure from this explosion builds very quickly and pushes the piston down from TDC to BDC during the power stroke shown in the Figure.
The exhaust valve is opened and the piston's exhaust stroke from BDC to TDC pushes the spent gases out of the cylinder into the exhaust manifold

Prof.Dr.Hasan ÖZTÜRK 7

Prof.Dr.Hasan ÖZTÜRK 8
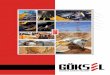
TWO-STROKE CYCLE: The Clerk two-stroke cycle is shown in the Figure. Thisengine does not need any valves, though to increase its efficiency it is sometimes provided with a passive (pressuredifferential operated) one at the intake port. It does not have a camshaft or valve train or cam drive gears to add weight and bulk to the engine. As its name implies, itrequires only two-strokes, or 3600 , to complete its cycle. There is a passageway, called a transfer port, between thecombustion chamber above the pistonand the crankcase below. There is also an exhaust port in the side of the cylinder. Thepiston acts to sequentially block or expose these ports as it moves up and down. Thecrankcase is sealed and mounts thecarburetor on it, serving also as the intake manifold.

Prof.Dr.Hasan ÖZTÜRK 9

Prof.Dr.Hasan ÖZTÜRK
10
An ideal indicator diagram for a four-cycle engine.Experimentally, an instrument called an engine indicator is used to measure the variation in pressure within a cylinder. The instrument constructs a graph, during operation of the engine, which is known as an indicator diagram.
An indicator diagram for the ideal air-standard cycle is shown in the below Figure for a fourstroke- cycle engine. During compression the cylinder volume changes from ν1 to ν2 and the cylinder pressure changes from p1 to p2. The relationship, at any point of the stroke, is given by the polytropic gas law as:
The polytropic exponent ,k, is often taken to be about 1.30 for both compression and expansion,

11
we designate the crank angle as ωt, taken positive in the counterclockwise direction, and theconnecting-rod angle as φ, taken positive when the crank pivot A is in the first quadrant as shown. Arelation between these two angles is seen from the figure:
DYNAMICS OF RECIPROCATING ENGINES
from trigonometric identities
where r and l designate the lengths of the crank and the connecting rod, respectively. Designating the piston position by the coordinate x
Prof.Dr.Hasan ÖZTÜRK

12
Note: For most engines the ratio r/l is about 1/4, and sothe maximum value of the second term under the radicalis about 1/16, or perhaps less
If we expand the radical using the binomial theorem and neglect all but the first two terms, we obtain:
tθ ω=
Differentiating this equation successively to obtain the velocity and acceleration gives
Prof.Dr.Hasan ÖZTÜRK

Prof.Dr.Hasan ÖZTÜRK
13
GAS FORCES: we assume that the moving parts are massless so that gravity and inertia forces and torques are zero, and also that there is no friction.
Now, using the binomial expansion and only the first two terms have been retained, we find that
Similarly,
‘

Prof.Dr.Hasan ÖZTÜRK 14
we can neglect those containing second or higher powers of r/l with only a very small error. The equation then becomes
12′F

Equivalent masses:
The mass of the connecting rod m3 is assumed to be concentrated at the center of gravity G3. We divide this mass into two parts; one, m3p, is concentrated at the center of percussion P for oscillation of the rod about point B. This disposition of the mass of the rod is dynamically equivalent to the original rod if the total mass is the same, if theposition of the center of gravity G3 is unchanged, and if the moment of inertia is the same. Writing these three conditions, respectively, inequation form produces
Solving Eqs. (a) and (b) simultaneously gives the portion of mass to be concentrated at each point
(c)
15
Prof.Dr.Hasan ÖZTÜRKIn analyzing the inertia forces due to the connecting rod of an engine, it is oftenconvenient to picture a portion of the mass as concentrated at the crankpin A andthe remaining portion at the wrist pin B. The reason for this is that the crankpinmoves on a circle and the wrist pin on a straight line. Both of these motions arequite easy to analyze. However, the center of gravity G of the connecting rod issomewhere between the crankpin and the wrist pin, and its motion is morecomplicated and consequently more difficult to determine in algebraic form.

16
In the usual connecting rod, the center of percussion P is close to the crankpin A and it is assumed that they are coincident. Thus, if we let lA = lp, the above equations reduce to
Prof.Dr.Hasan ÖZTÜRK

Prof.Dr.Hasan ÖZTÜRK17
Dividing the crank mass into two parts, at O2 and A, regarding the static equivalence conditions.
Using the methods of the preceding section, we begin by locating equivalent masses at the crankpins and at the wrist pin. Thus,
INERTIA FORCES

Prof.Dr.Hasan ÖZTÜRK
18
the position vector of the crankpin relative to the origin O2 is
Differentiating this equation twice with respect to time, the acceleration of point A is
The inertia force of the rotating parts is then
Because the analysis is usually made at constant angular velocity (α = 0), this equation reduces to
Acceleration of the piston has been found as,
Thus, the inertia force of the reciprocating parts is
α = 0

Prof.Dr.Hasan ÖZTÜRK 19
The total inertia force for all of the moving parts (for constant angular velocity). The components in the x and y directions are:
primary inertia force secondary inertia force

Prof.Dr.Hasan ÖZTÜRK 20
INERTIA TORQUE
12′′F 14′′F
14′′ =F
The inertia force caused by the mass at the crankpin A has no moment about O2 and, therefore, produces no inertia torque.
By taking moment about the crank center
x
Inertia torque is a periodic function, including the first three harmonics

Prof.Dr.Hasan ÖZTÜRK 21
BEARING LOADS IN A SINGLE- CYLINDER ENGINE
The resultant total bearing loads are made up of the following components:
1. Gas-force components, designated by a single prime;
2. Inertia force caused by the mass m4 of the piston assembly, designated by a double prime;
3. Inertia force of that part m3B of the connecting rod assigned to the piston-pin end (wrist-pin end), designated by a triple prime;
4. Connecting-rod inertia force of that part m3A at the crankpin end, designated by a quadruple prime.

Prof.Dr.Hasan ÖZTÜRK 22
1- Gas force (examined at the beginning, page 13).
2. Inertia force caused by the mass m4 of the piston assembly, designated by a double prime;
φ φ

Prof.Dr.Hasan ÖZTÜRK 23
3. Inertia force of that part m3B of the connecting rod assigned to the piston-pin end(wrist-pin end), designated by a triple prime;
φ φ
R

Prof.Dr.Hasan ÖZTÜRK24
4. Connecting-rod inertia force of that part m3A at the crankpin end, designated by a quadruple prime.
32 12′′′′ ′′′′=F F
Whereas a counterweight attached to thecrank balances the reaction at O2, it cannot make F’’’’32 zero. Thus

Prof.Dr.Hasan ÖZTÜRK 25
Superposition

Prof.Dr.Hasan ÖZTÜRK 26
CRANKSHAFT TORQUE
The torque delivered by the crankshaft to the load is called the crank shaft torque, and it is the negative of the moment of the couple formed by the forces F41 and Fy
21,. Therefore, it is obtained from the equation
2O
41F
B
21F 21T
The torque delivered by the crankshaft to the load.

SHAKING FORCES OF ENGINES (due to only reciprocating masses) The inertia force caused by the reciprocating masses is illustrated acting in the positive direction in the below Figure (a). In Figure (b) the forces acting upon the engine block caused by these inertia forces are illustrated.
Shaking Force: (Linear vibration in x direction)
Shaking Couple: (Torsional vibration about crank center)

Prof.Dr.Hasan ÖZTÜRK 28
Circle diagram illustrating inertia forces. The total shaking force is:

Prof.Dr.Hasan ÖZTÜRK 29

30