Upload
others
View
3
Download
0
Embed Size (px)
Citation preview
Foundations and TrendsR© in NetworkingVol. 9, No. 2 (2014) 107–215c© 2015 C. W. TanDOI: 10.1561/1300000048
Wireless Network Optimization byPerron-Frobenius Theory
Chee Wei TanCity University of Hong Kong
Contents
1 Wireless Network Optimization 1081.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . 1081.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . 1091.3 Why is the Perron-Frobenius Theory useful? . . . . . . . . 1111.4 System Model . . . . . . . . . . . . . . . . . . . . . . . . 114
2 Mathematical Preliminaries 1192.1 Perron-Frobenius Theorem . . . . . . . . . . . . . . . . . 1192.2 Key Inequalities . . . . . . . . . . . . . . . . . . . . . . . 1212.3 Inverse Eigenvalue Problem . . . . . . . . . . . . . . . . . 1242.4 Nonlinear Perron-Frobenius Theory . . . . . . . . . . . . . 126
3 Max-min Fairness Optimization 1303.1 Max-min SINR Fairness . . . . . . . . . . . . . . . . . . . 1303.2 Min-max Outage Probability Fairness . . . . . . . . . . . . 1393.3 Duality by Lagrange and Perron-Frobenius . . . . . . . . . 151
4 Max-min Wireless Utility Maximization 1564.1 Unifying Max-min Fairness Framework . . . . . . . . . . . 1564.2 Case Studies . . . . . . . . . . . . . . . . . . . . . . . . . 1694.3 Numerical Examples . . . . . . . . . . . . . . . . . . . . . 1764.4 Open Issues . . . . . . . . . . . . . . . . . . . . . . . . . 180
ii
iii
5 General Wireless Utility Maximization 1825.1 Sum Rate Maximization . . . . . . . . . . . . . . . . . . . 1835.2 Convex Relaxation and Polynomial-time Algorithms . . . . 1875.3 Special Case with Individual Power Constraints . . . . . . 1955.4 Open Issues . . . . . . . . . . . . . . . . . . . . . . . . . 202
6 Conclusion 205
Acknowledgements 206
Appendices 207
A Modeling the Perron-Frobenius Eigenvalue by OptimizationSoftware 208
References 211
Abstract
A basic question in wireless networking is how to optimize the wirelessnetwork resource allocation for utility maximization and interferencemanagement. How can we overcome interference to efficiently optimizefair wireless resource allocation, under various stochastic constraints onquality of service demands? Network designs are traditionally dividedinto layers. How does fairness permeate through layers? Can physi-cal layer innovation be jointly optimized with network layer routingcontrol? How should large complex wireless networks be analyzed anddesigned with clearly-defined fairness using beamforming?
This monograph provides a comprehensive survey of the models,algorithms, analysis, and methodologies using a Perron-Frobenius the-oretic framework to solve wireless utility maximization problems. Thisapproach overcomes the notorious non-convexity barriers in these prob-lems, and the optimal value and solution of the optimization problemscan be analytically characterized by the spectral property of matricesinduced by nonlinear positive mappings. It also provides a systematicway to derive distributed and fast-convergent algorithms and to eval-uate the fairness of resource allocation. This approach can even solveseveral previously open problems in the wireless networking literature.
More generally, this approach links fundamental results in nonnega-tive matrix theory and (linear and nonlinear) Perron-Frobenius theorywith the solvability of non-convex problems. In particular, it can solvea particular class of max-min problems optimally; for truly nonconvexproblems, e.g., the sum rate maximization problem, it can even be usedto identify polynomial-time solvable special cases or to enable convexrelaxation for global optimization. We highlight the key aspects of thenonlinear Perron-Frobenius theoretic framework through several prac-tical examples in MIMO wireless cellular, heterogeneous small-cell andcognitive radio networks.
C. W. Tan. Wireless Network Optimization by Perron-Frobenius Theory.Foundations and TrendsR© in Networking, vol. 9, no. 2, pp. 107–215, 2014.DOI: 10.1561/1300000048.
1Wireless Network Optimization
1.1 Introduction
The demand for broadband mobile data services has grown significantlyand rapidly in wireless networks. As such, many new wireless devicesare increasingly operating in the wireless spectrum that are meant to beshared among many different users. Yet, the sharing of the spectrum isfar from perfect. Due to the broadcast nature of the wireless medium,interference has become a major source of performance impairment.Current systems suffer from deteriorating quality due to a fixed resourceallocation that does not adequately take interference into account.
As wireless networks become more heterogeneous and ubiquitous inour life, they also become more difficult to design and optimize. Howshould these large complex wireless networks be analyzed and designedwith clearly-defined fairness and optimality in mind? In this regard,wireless network optimization has become an important tool to designresource allocation algorithms that can realize the untapped benefitsof co-sharing wireless resources and to manage interference in wirelessnetworks [56, 36, 69, 19, 23]. Without appropriate resource coordina-tion, the wireless network may become unstable or may operate in ahighly inefficient and unfair manner.
108
1.2. Related Work 109
In wireless network optimization, the performance objective of awireless transmission can be modeled by a nonlinear utility functionthat takes into account important wireless link metrics. Examples ofthese wireless metrics are the Signal-to-Interference-and-Noise Ratio(SINR), the Mean Square Error (MSE) or the transmission outageprobability. The total utility function is then maximized over the jointsolution space of all possible operating points in the wireless network.These operating points are realized in terms of the powers and inter-ference at the physical link layer.
As such, wireless network optimization can be used to address en-gineering issues such as how to design wireless network algorithms oranalyzing the tradeoffs between individual link performance and overallsystem performance. It can even be useful for understanding cross-layeroptimization, for example, how these algorithms interact between dif-ferent network layers, such as the physical and medium access controllayers, in order to achieve provable efficiency for the overall system. Italso sheds insights on how fairness permeates through the network lay-ers when interference is dominant. This can open up new opportunitiesto jointly optimize physical layer innovation and other networking con-trol mechanism that lead to more robust and reliable wireless networkprotocols.
1.2 Related Work
Due to the need to share limited wireless resources, fairness is an im-portant consideration in wireless networks. Fairness is affected by thechoice of the nonlinear utility functions of the wireless link metrics[56, 19, 21, 12]. In addition, fairness experienced by each user in thewireless networks is also affected by the channel conditions, multiuserinterference, and other factors such as the wireless quality-of-servicerequirements. An example of such a requirement is the interferencetemperature constraints in cognitive radio networks that are essen-tially constraints imposed on the received interference for some users[40, 96, 70]. Another example is outage probability specification con-straints in heterogeneous networks [45, 52]. As such, fairness can be
110 Wireless Network Optimization
provisioned by choosing an optimal operating point that is fair in somesense to all the users by an appropriate formulation of a wireless util-ity maximization. The main challenges in solving these wireless utilitymaximization problems come from the nonlinear and coupling depen-dency of link metrics on channel conditions and powers, as well as theinterference among the users. In addition, these are nonconvex prob-lems that are notoriously difficult to solve optimally. Moreover, design-ing scalable and distributed algorithms with low-complexity to solvethese nonconvex problems is even harder.
In fact, there are several important considerations to algorithm de-sign in wireless networks. First, algorithms have to adapt the wire-less resources such as the transmit power and to overcome interferencebased on locally available information. This means that the algorithmshave to be as distributed as possible. Second, the algorithms are prac-tical to deploy in a decentralized manner, i.e., the algorithms haveminimal or, preferably, no parameter tuning by a controller. Third,the algorithms have good convergence performance. This is especiallyimportant since wireless users can arrive and depart in a dynamic set-ting. Henceforth, wireless resources need to be adapted fast enoughto converge to a new optimal operating point whenever the networkconditions change. This can be particularly challenging for some kindsof wireless networks such as wireless cognitive radio networks due tothe tight coupling in the transmit powers and the interference temper-ature constraints between the primary users and the secondary users[40, 96, 70]. Whatever the algorithms may be, the algorithm designmethodology is intrinsically driven by the theoretical approach used inanalyzing the optimization problems. Finding an appropriate theoreti-cal approach to study wireless network optimization is thus important.
There are several work in the literature on tackling the nonconvexityhurdles in wireless network optimization. The authors in [20, 19, 23, 45]applied geometric programming to solve a certain class of noncon-vex wireless utility maximization problems that can be transformedinto convex ones. The authors in [12] studied the use of Gibbs sam-pling techniques to solve nonconvex utility maximization problems, butthe optimality of the solutions cannot be guaranteed. The authors in
1.3. Why is the Perron-Frobenius Theory useful? 111
[21, 39, 54] tackled deterministic wireless utility maximization problemsthat involved rates and powers, but the proposed techniques could nothandle stochastic constraints. In [77, 76, 72, 74, 16, 18, 97, 100, 99],the authors studied the max-min utility fairness problem in wirelessnetworks using a particular form of nonlinear Perron-Frobenius theory[50], [55]. These works demonstrated that the optimal solution to vari-ous widely-studied max-min optimization problems, e.g., the max-minSINR and max-min rate problems, can be characterized analyticallyand, more importantly, can be efficiently computed by iterative algo-rithms that can be made distributed. We introduce and present someof these work using the nonlinear Perron-Frobenius theory approach inthis monograph.
1.3 Why is the Perron-Frobenius Theory useful?
The Perron-Frobenius theory introduced in this monograph is a newtheoretical framework for analyzing a class of nonconvex optimizationproblems for resource allocation in wireless networks. Essentially, thisframework provides a convenient suite of theories and algorithms tosolve a broad class of wireless network optimization problems opti-mally by leveraging on the recent developments of the nonlinear Perron-Frobenius theory in mathematics. When combined with optimization-theoretic approaches such as convex reformulation and convex relax-ation, this nonlinear Perron-Frobenius theory framework enables thedesign of efficient algorithms with low complexity that are applicableto a wide range of wireless network applications. Let us first discuss aspecial case of this nonlinear Perron-Frobenius theory in the following.
In nonnegative matrix theory, the classical linear Perron-Frobeniustheorem is an important result that concerns the eigenvalue prob-lem of nonnegative matrices, and has many engineering applications[63, 35, 68, 64, 30]. Notably, the linear Perron-Frobenius Theorem hasconsistently proven to be a useful tool in wireless network resource al-location problems. Its application to power control in wireless networkshas been widely recognized (see, e.g., [67, 80, 22]), and can be tracedback to earlier work in [1, 60] on balancing the signal to interference
112 Wireless Network Optimization
ratio in satellite communication that was later adopted for wireless cel-lular networks in [2, 94, 31, 87, 92, 83, 66, 90, 10, 11] and wireless adhoc networks [28]. In particular, it has been used in a total power min-imization problem studied in [31, 92, 83, 66, 28], in which the Perron-Frobenius Theorem is used to ascertain the problem feasibility and thestability of power control algorithms proposed in [31, 83, 66, 28].
In the seminal work in [1] that first formulated and analyzed the sig-nal to interference ratio balancing problem, the linear Perron-Frobeniustheorem was used to derive the optimal solution analytically for thisnonconvex problem. Subsequently, the same problem formulation wasadopted in [60, 2, 94, 87] for designing power control algorithms for bothsatellite and wireless cellular communication networks that converge tothe solution established in [1]. That the Perron-Frobenius theorem isfundamental is due to two facts. First, the problem parameters andoptimization variables in wireless network optimization problems aremostly nonnegative. Second, it captures succinctly the unique featureof competition for limited resources among users, namely, increasing theshare of one decreases the shares of others as well as who is competingwith whom.
Another popular approach to tackle the nonconvexity hurdles inthese wireless network optimization problems has been the use ofgeometric programming (see [27, 15, 20, 14] for an introduction)and its successive convex approximation as used by the authors in[45, 19, 23, 20]. The idea of the geometric programming approachis to reformulate the nonconvex problems as suitable classes of con-vex optimization problems (geometric programs) through a logarith-mic change-of-variable trick. This leverages the inherent nonnegativityproperty. The geometric programs are then typically solved numericallyby the interior-point method in a centralized fashion. In fact, geometricprogramming is closely related to the Perron-Frobenius theorem. Forexample, it can be used to establish the log-convexity property of thePerron-Frobenius eigenvalue [46, 61] (also see [15]).
The use of the linear Perron-Frobenius theorem in earlier work how-ever has several limitations. They cannot address the general case (suchas when we consider the thermal noise or general power constraints). In
1.3. Why is the Perron-Frobenius Theory useful? 113
addition, the Perron-Frobenius theorem has not been used to system-atically solve other broader nonconvex wireless network optimizationproblems beyond the power control optimization problems studied in[1, 60, 2, 94, 87, 31, 92, 83, 66, 28]. In fact, to overcome the specific chal-lenges due to nonconvexity, it is imperative to consider more general(i.e., nonlinear) version of the Perron-Frobenius theory that can spawnnew approaches to characterize optimality and analyze the equilibriumas well as designing distributed algorithms for wireless networks.
There are various mathematical advances in extending the linearPerron-Frobenius theorem to nonlinear ones. These include works thatextend the Perron-Frobenius theorem for positive matrices to nons-mooth and nonlinear functions in the 1960s (e.g., see Chapter 16 in[5], [55]) for studying the dynamics of cone-preserving operators. Thenonlinear Perron-Frobenius theory is now emerging as a rigorous andpractically useful mathematical tool to solve a wide range of impor-tant engineering problems and applications [49, 50, 9, 3, 55]. In thismonograph, we will introduce and illustrate how the nonlinear Perron-Frobenius theory can tackle several key challenging wireless networkoptimization problems following the work in [76, 79, 78, 72, 77, 16,18, 17, 43, 97, 100, 99, 98, 53, 42, 73, 74]. Whenever applicable, wealso highlight the connection to previous works that rely on the linearPerron-Frobenius theorem as special cases.
The following notation is used in this monograph. Boldface upper-case letters denote matrices, boldface lowercase letters denote columnvectors, and u ≥ v denotes componentwise inequality between vectorsu and v. We also let (By)l denote the lth element of By. Let x◦y denotethe Schur product of the vectors x and y, i.e., x◦y = [x1y1, . . . , xLyL]
> .Let ‖w‖x∞ be the weighted maximum norm of the vector w with respectto the weight x, i.e., ‖w‖x∞ = maxl wl/xl, x > 0. We write B ≥ F ifBij ≥ Fij for all i, j. The Perron-Frobenius eigenvalue of a nonnegativematrix F is denoted as ρ(F), and the Perron right and left eigenvectorof F associated with ρ(F) are denoted by x(F) ≥ 0 and y(F) ≥ 0 (orsimply x and y when the context is clear), respectively. The super-script (·)> denotes transpose. We denote el as the lth unit coordinatevector and I as the identity matrix.
114 Wireless Network Optimization
1.4 System Model
In this section, we introduce the system models for the wireless networkutility maximization problems considered in the monograph. There areprimarily two different kinds of system models - one that considers astatic transmission channel (i.e., frequency-flat fading) and one thatconsiders stochastic channel fading. Whenever applicable, we will em-phasize the system model to avoid confusion.
Let us first introduce the static transmission channel for modelinga wireless network by the Gaussian interference channel [24]. There arealtogether L links or users (equivalently, transceiver pairs) that wantto communicate with its desired receiver. Due to mutual interferingchannels, each user treats the multiuser interference as noise, i.e., nointerference cancellation. This is a commonly used model (in, e.g., [19,23, 22]) to model many wireless networks such as the radio cellularnetworks and ad-hoc networks. Let us denote the transmit power forthe lth user as pl for all l. Assuming that a linear single-user receiver(e.g., a matched-filter) is used, the Signal-to-Interference-and-Noise-Ratio (SINR) for the lth user can be given by
SINRl(p) =Gllpl∑
j 6=lGljpj + nl
, (1.1)
where Glj are the channel gains from the transmitter j to the receiverl and nl is the additive white Gaussian noise (AWGN) power for thelth receiver. For brevity, we collect the channel gains in the channelgain matrix G, and the channel gains take into account propagationloss, spreading loss and other transmission modulation factors. Noticethat the SINR is a function in terms of the transmit powers and, fur-thermore, it is always nonnegative since all the quantities involved in(1.1) are nonnegative. There are many other important wireless perfor-mance metrics that are also directly dependent on the achieved SINR.For example, assuming a fixed bit error rate at the receiver, the Shan-non capacity formula can be used to deduce the achievable data rateof the lth link as [24]:
log (1 + SINRl(p)) nats/symbol. (1.2)
1.4. System Model 115
Let us define a nonnegative square matrix F with the entries givenby:
Flj ={
0, if l = jGljGll, if l 6= j
(1.3)
and a vector
v =(n1G11
,n2G22
, . . . ,nLGLL
)>. (1.4)
Observe that F and v capture the normalized values of the cross-channel gain parameters and the background noise power respectively.They are regarded as given constant problem parameters and are usefulfor notations represented in a compact manner in this monograph.
Let us next introduce the system model with stochastic channelfading that builds on top of the static transmission channel model bytaking into account more realistic wireless transmission features. Oneimportant feature is the stochastic channel fading that is typically mod-eled by a Rayleigh, a Ricean or a Nakagami distribution depending onthe wireless environment [80, 47]. For example, Rayleigh fading is rel-evant to in-building coverage model and urban environments (wheresmall cells are mostly deployed in a heterogeneous network).
Under stochastic channel fading, the power received from the jthtransmitter at lth receiver is given by GljRljpj where Glj models aconstant nonnegative path gain and Rlj is a random variable to modelthe stochastic channel fading between the jth transmitter and the lthreceiver. In particular, we assume that Rlj is independently distributedwith unit mean. For example, under Rayleigh fading, the distributionof the received power from the jth transmitter at the lth receiver isexponential with a mean value E[GljRljpj ] = Gljpj .
When there is stochastic channel fading, the Signal-to-Interference-Noise Ratio (SINR) at the lth receiver can be expressed as the followingby using the above notations [45, 22]:
SINRl(p) =Rllpl∑
j 6=lFljRljpj + vl
. (1.5)
Notice that (1.5) is a random variable that depends on the stochas-tic channel fading realization. In particular, this random variable in
116 Wireless Network Optimization
(1.5) is also a function of the transmit powers (and should not be con-fused with (1.1) which has no direct physical meaning in the contextof stochastic channel fading).
Now, the transmission from the lth transmitter to its receiver issuccessful if SINRl(p) ≥ βl (no outage), where βl is a given threshold forreliable communication. An outage occurs at the lth receiver wheneverSINRl(p) < βl. We express this outage probability of the lth user by
P (SINRl(p) < βl). (1.6)
Notice that the transmit powers are typically coupled togetherthrough the various wireless performance metric functions for any par-ticular user. For example, the transmit powers of different users arecoupled in (1.1) and (1.6) when the channel has frequency-flat fad-ing and stochastic fading respectively. Adapting the transmit powersdirectly influences the wireless performance metrics. As such, in thewireless network optimization problems studied in this monograph, thetransmit power vector (p1, . . . , pL)
> is the main optimization variableof interest.
In addition, the transmit powers in wireless networks are typicallyconstrained. This is modeled by a power constraint set P that can bedue to resource budget consideration [80]. For example, in a cellularuplink system, we often have individual power constraints, i.e.,
P = {p | p ≥ 0, pl ≤ p̄ ∀ l}. (1.7)
Power constraints can also be used for interference management.Let us give an example of interference management in wireless hetero-geneous networks. Say, in a wireless heterogeneous network, there aretwo different user type - the small cell users and the macrocell users. Abasic premise imposed on small cells in wireless heterogeneous networksis that the following two conditions are satisfied [52]:
1. A small cell user receives adequate levels of transmission qualitywithin the small cell.
2. The small cell users do not cause unacceptable levels of interfer-ence to the macrocell users.
1.4. System Model 117
To satisfy the second condition above, a possibility is to explicitlyimpose power constraints on the small cell users. Let us illustrate usingan example of a single macrocell user and multiple small cells in [52].Assume that there is no fading between this single macrocell receiverand all the small cell users. This assumption holds only in this para-graph for illustration purpose. Let us denote this macrocell user by theindex 0 and the small cell users by indices 1, . . . , L. The macrocell usertransmits with a fixed power P0, where P0 ≥ γ0v0, i.e., the macrocelluser can satisfy the SINR threshold γ0 even when there is no interfer-ence from the small cells. In the presence of small cells’ interference, theSINR of this macrocell user has to satisfy P0∑L
j=1 F0jpj+v0≥ γ0, which
can be rewritten as a single power constraint to yield
P =
p | p ≥ 0,L∑j=1
F0jpj ≤ (P0/γ0 − v0)
(1.8)that must be satisfied by the transmit powers of all the small cell users.Note that (1.8) is feasible when P0 ≥ γ0v0. In general, a feasible powerconstraint of the form a>p ≤ 1 for some positive constant vector acan be used to model interference management requirements. Noticethat this example of an interference management constraint is alsoapplicable to other wireless applications such as the cognitive radionetworks with the primary user and secondary user types [40, 96, 70].
Now, there are many different possible ways to satisfy the first con-dition above on the adequate levels of transmission quality. In thismonograph, we examine some of these different ways that in fact alsorelate to how this monograph is organized in the following.
We first begin with the mathematical preliminaries on the Perron-Frobenius theorem and the nonlinear Perron-Frobenius theory in Chap-ter 2, and then introduce how these theories are used to solve variousoptimization problems in subsequent chapters. In the first part of Chap-ter 3, we study the optimization of the max-min weighted SINR using(1.1) for a static channel model. In the second part of Chapter 3, westudy the optimization of the worst-case outage probability using (1.6),i.e., minimizing the maximum outage probability when there is stochas-tic channel fading, to provision a minimum adequate level of fairness for
118 Wireless Network Optimization
all the users. These two problems only involve simple power constraintssuch as that given in (1.8). In Chapter 4, we study more general utilityfunctions to capture the satisfaction level of transmission quality in dif-ferent kinds of wireless networks, and also to consider a broader classof nontrivial power constraint sets to model resource constraints andinterference management requirements. The Perron-Frobenius theorysuggests that the unique equilibrium that results from the competitionfor resources in the optimization problems in Chapters 3 and 4 is ameaningful one. In Chapter 5, we study more general nonconvex opti-mization problems involving the achievable data rate using (1.2) andshow how the Perron-Frobenius theory can be a useful mathematicaltool to tackle nonconvexity. We also highlight the open issues in thesevarious wireless network optimization problems and finally concludethe monograph in Chapter 6.
2Mathematical Preliminaries
In this chapter, we state the classical linear Perron-Frobenius theo-rem and its various nonlinear extensions. We also review several resultsfound in the nonnegative matrix theory literature that are related to thelinear Perron-Frobenius theorem. In particular, we will describe funda-mental inequalities, the log-convexity property of the Perron-Frobeniuseigenvalue and the inverse eigenvalue problem in nonnegative matrixtheory. To facilitate reading, we will highlight the application of thesemathematical tools whenever they are used in the various wireless net-work optimization problems encountered in the subsequent chapters ofthis monograph.
2.1 Perron-Frobenius TheoremThe classical linear Perron-Frobenius theorem states that the spectralradius of a square nonnegative matrix is in the spectrum of the matrix[63, 35, 7, 68].
Theorem 2.1. Let A ∈ RL×L+ be an irreducible1 nonnegative matrix.Then, the following statements hold:
1A nonnegative matrix F is said to be irreducible if there exists a positive integerm such that the matrix Fm has all entries positive.
119
120 Mathematical Preliminaries
1. The spectral radius of A, ρ(A), is a positive eigenvalue of A.
2. ρ(A) is an algebraically simple eigenvalue of A
3. All other eigenvalues λ of A satisfy the inequality ‖λ‖ ≤ ρ(A) ifand only if A is primitive, i.e. Ak > 0 for some integer k ≥ 1.
Let us call this spectral radius (eigenvalue with the largest absolutevalue) of an irreducible nonnegative matrix F as the Perron-Frobeniuseigenvalue of F denoted by ρ(F). The Perron-Frobenius right and lefteigenvector of F associated with ρ(F) are denoted by x(F) ≥ 0 andy(F) ≥ 0 respectively. Furthermore, from Theorem 2.1 above, ρ(F) issimple and positive, and x(F),y(F) > 0 (cf. [63, 35, 68] and Proposition6.6 in [8]).
In addition, there is a widely-known numerical method in linearalgebra that can be used to compute the Perron-Frobenius eigenvectorsof the matrix A in Theorem 2.1. This is the power method that is aniterative fixed-point algorithm (see, e.g., [84, 5, 82, 8]). Taking thematrix A as an input and letting k be the iteration index, the powermethod is described by
z(k + 1) = Az(k)‖Az(k)‖
for some positive norm ‖ · ‖ that computes the Perron-Frobenius righteigenvector of the matrix A. Here, starting from any positive vectorz(0), the vector z(k) is multiplied with A and then normalized at thekth iteration. This iteration converges asymptotically to the Perron-Frobenius right eigenvector of the matrix A in Theorem 2.1 up to apositive scaling factor. On the other hand, by using A> as the input,one can use this power method to numerically compute the Perron-Frobenius left eigenvector of the matrix A in Theorem 2.1.
This celebrated result has numerous applications in pure and ap-plied mathematics as well as a diverse range of engineering applications.We refer the reader to [7, 6, 68, 64, 30] for more details.
2.2. Key Inequalities 121
2.2 Key Inequalities
In this section, we state some fundamental results and inequalities innonnegative matrix theory that are related to the Perron-FrobeniusTheorem (Theorem 2.1). Of particular importance is the so-calledFriedland-Karlin inequalities established in [34]. We also give severalextensions and applications of the Friedland-Karlin inequalities in con-junction with the linear Perron-Frobenius theorem.
The first inequality that is fairly well-known in nonnegative matrixtheory is the arithmetic-geometric mean inequality [68] (also see [27]for its generalized version). The arithmetic-geometric mean inequalitystates that ∑
l
αlvl ≥∏l
vαll , (2.1)
where v > 0 and α ≥ 0, 1>α = 1. Equality is achieved in (2.1) ifand only if v1 = v2 = · · · = vL. In fact, the arithmetic-geometric meaninequality is a fundamental inequality of geometric programming inconvex optimization theory [27, 15, 14, 20].
2.2.1 Collatz-Wielandt Theorem
A well-known result in nonnegative matrix theory is the max-min char-acterization of the Perron-Frobenius eigenvalue of an irreducible non-negative matrix A. This result is known as the Collatz-Wielandt The-orem in nonnegative matrix theory, e.g., see [7, 34]. In particular, themax-min characterization of ρ(A) is given by:
maxz>0
minl
(Az)lzl
= minz>0
maxl
(Az)lzl
= ρ(A), (2.2)
The Collatz-Wielandt Theorem given in (2.2) provides an inter-esting optimality characterization of the Perron-Frobenius eigenvalueas the optimal value to both a max-min optimization problem and amin-max optimization problem (, in fact, both are nonconvex), and,in addition, the corresponding Perron-Frobenius right eigenvector asthe corresponding optimal solution. The Collatz-Wielandt Theorem iswell-known in standard linear algebra. This optimality characterization
122 Mathematical Preliminaries
of the Perron-Frobenius eigenvalue leads to the following SubinvarianceTheorem in nonnegative matrix theory [68].
2.2.2 Subinvariance Theorem
We state the following result from [68].
Theorem 2.2 (Theorem 1.6, [68]). Let A be an irreducible nonnegativematrix, s a positive number, and z ≥ 0, a vector satisfying Az ≤ sz.Then, (i) z > 0; (ii) s ≥ ρ(A). Moreover, s = ρ(A) if and only ifAz = sz.
From the min-max optimization problem in (2.2) of the Collatz-Wielandt Theorem, we see that the Subinvariance Theorem furthercharacterizes the optimality condition related to this problem. In par-ticular, the optimal solution is unique and can be obtained by solvinga fixed-point equation Az = sz where the solution to z is simply thePerron-Frobenius right eigenvector of A.
Now, another equally important mathematical tool in nonnegativematrix theory is the Friedland-Karlin inequalities established in [34].The Friedland-Karlin inequalities are useful in the sense that they canbe used to deduce the Collatz-Wielandt Theorem and the Subinvari-ance Theorem in the above.
2.2.3 Friedland-Karlin Inequalities
We state several important results on the Friedland-Karlin inequalitiesas given in [34]:
Theorem 2.3 (Theorem 3.1 [34]). Let A ∈ RL×L+ be an irreducible non-negative matrix. Assume that x(A) = (x1(A), . . . , xL(A))
>,y(A) =
(y1(A), . . . , yL(A))>> 0 are the right and left Perron-Frobenius eigen-
vectors of A, normalized such that x(A)◦y(A) is a probability vector.Suppose γ is a nonnegative vector. Then,
ρ(A)L∏l=1
γ(x(A)◦y(A))ll ≤ ρ(diag(γ)A). (2.3)
2.2. Key Inequalities 123
If γ is a positive vector then equality holds if and only if all γl are equal.Furthermore, for any positive vector z = (z1, . . . , zL)
> , the followinginequality holds:
ρ(A) ≤L∏l=1
((Az)lzl
)(x(A)◦y(A))l. (2.4)
If A is an irreducible nonnegative matrix with positive diagonal ele-ments, then equality holds in (2.4) if and only if z = tx(A) for somepositive t.
We state below some convexity results related to the Perron-Frobenius eigenvalue that are of direct consequences of the Friedland-Karlin inequalities [32, 33].
2.2.4 Convexity Property of the Perron-Frobenius Eigenvalue
By using the arithmetic-geometic mean inequality in (2.1) along withthe Friedland-Karlin inequality in (2.4), we have the following result.
maxλ≥0,1>λ=1 minp≥0
∑l
λl(Ap)lpl
= minp≥0
maxλ≥0,1>λ=1
∑l
λl(Ap)lpl(2.5)
It is interesting to note that Friedland in [32, 33] established Theo-rem 2.3 by using the Donsker-Varadhan’s variational principle as givenin (2.5) and also the linear Perron-Frobenius theorem (Theorem 2.1)[29, 32, 33]. In other words, (2.5) offers a characterization of the Perron-Frobenius eigenvalue via the Donsker-Varadhan’s variational principle(cf. Theorem 3.2 in [32]).
As an important application of the Friedland-Karlin inequalities,(2.5) can be used to show that, given a nonnegative matrix B, thefunction
log ρ(diag(eη)B) (2.6)is convex. Furthermore, it is strictly convex if B is irreducible [29,32, 33]. In fact, this makes use of the log-convexity property of thePerron-Frobenius eigenvalue. This convexity result will be used in thefollowing.
124 Mathematical Preliminaries
2.3 Inverse Eigenvalue Problem
In this section, we introduce an application of the Friedland-Karlin in-equalities and the linear Perron-Frobenius theorem to solve an inverseeigenvalue problem in nonnegative matrix theory. An interesting by-product is a convex optimization problem with the Perron-Frobeniuseigenvalue as its constraint sets. We will outline how this convex op-timization problem can be solved analytically by leveraging the log-convexity property of the Perron-Frobenius eigenvalue. Consider thefollowing inverse eigenvalue problem.
Problem Let B ∈ RL×L+ ,m ∈ RL+ be a given irreducible nonneg-ative matrix and a positive probability vector, respectively. There aretwo key questions related to this.
First, when does there exist η ∈ RL such that x(diag(eη)B) ◦y(diag(eη)B) = m?
Second, if such η exists, when is it unique up to an addition t1?To solve this inverse eigenvalue problem, let us recall Theorem 3.2
in [34] (a consequence of Theorem 2.3 in the above, i.e., Theorem 3.1in [34]) that is reproduced in the following.
Theorem 2.4 (Theorem 3.2 [34]). Let A ∈ RL×L+ ,u,v ∈ RL+ be given,where A is irreducible with positive diagonal elements and u,v arepositive. Then, there exists D1,D2 ∈ RL×L+ such that
D1AD2u = u, v>D1AD2 = v
>, D1 = diag(f), D2 = diag(g), (2.7)
where f ,g > 0.The pair (D1,D2) is unique to the change (tD1, t−1D2) for any
t > 0. There exist η ∈ RL such that x(diag(eηB))◦y(diag(eηB)) = m.Furthermore, η is unique up to an addition t1.
In brief, Theorem 2.4 proves the existence of the solution to Problem2.3, and this solution can be efficiently obtained by a numerical methodas given in the following result.
Corollary 2.5 (Corollary A.6 [78]). Let B ∈ RL×L+ ,m ∈ RL+ be a givenirreducible nonnegative matrix with positive diagonal elements and apositive probability vector, respectively. Then, there exists η ∈ RL such
2.3. Inverse Eigenvalue Problem 125
that x(diag(eη)B) ◦ y(diag(eη)B) = m. Furthermore, η is unique upto an addition of t1. In particular, this η can be computed by solvingthe following convex optimization problem:
maximize m>ηsubject to log ρ(diag(eη)B) ≤ 0,variables: η = (η1, . . . , ηL)
> ∈ RL.(2.8)
Observe that (2.8) has a linear objective function and a constraintset expressed by the Perron-Frobenius eigenvalue function of a non-negative matrix. A unique feature of this Perron-Frobenius eigenvaluecharacterization is the log-convexity property of the Perron-Frobeniuseigenvalue [46, 61]. In other words, the constraint set in (2.8) is convexand hence (2.8) is a convex optimization problem. This can be solvednumerically using an interior-point solver (see, for example, the cvxconvex optimization software package [38]). We give a software imple-mentation in the appendix to numerically handle the Perron-Frobeniuseigenvalue function in (2.8) as part of the cvx software package inmodeling and numerical evaluation of the Perron-Frobenius eigenvaluefunction whenever it appears in the objective function or in the con-straint functions in an optimization problem formulation.
In summary, even though some of these optimization problems en-countered in nonnegative matrix theory, e.g., (2.2) and (2.5), are non-convex, they can be converted into equivalent convex ones (similar inform as (2.8)) by a logarithmic change-of-variable trick and be solvedefficiently. More interestingly, the optimal solutions and optimal valuecan be obtained analytically often in terms of the Perron-Frobeniuseigenvalue and its eigenvectors (in fact, the same can be said for itsoptimal Lagrange dual solution, namely, the optimal dual solution of(2.8) is the Schur product of the Perron-Frobenius right and left eigen-vectors). We refer the reader to the details and additional results onthe inverse eigenvalue problem in [78].
2.3.1 Quasi-invertibility
We describe here a notion of quasi-invertibility of a nonnegative matrixintroduced by Wong in [88]. This quasi-inverse notion was analyzed
126 Mathematical Preliminaries
using nonnegative matrix theory tools in [88], and finds useful applica-tions in analyzing linear economic model equilibrium problems in [88]and the nonconvex optimization problems studied in Chapter 5 of thismonograph. This quasi-inverse of a nonnegative matrix is defined asfollows [88]:
Definition 2.1 (Quasi-invertibility). A square nonnegative matrix A is aquasi-inverse of a square nonnegative matrix B if A−B = AB = BA.Furthermore, (I−B)−1 = I + A.
In other words, for a given square nonnegative matrix A, we firstcompute either A(I + A)−1 or (I + A)−1A. If this computed matrix isnonnegative, we denote this computed matrix B ≥ 0 and say that thequasi-inverse of B exists (which is A by Definition 2.1).
In general, a nonnegative matrix may have a quasi-inverse or itmay not have. When a nonnegative matrix has a quasi-inverse, thePerron-Frobenius theorem can be used to relate the spectrum of thisnonnegative matrix to that of its quasi-inverse. There are special casesof the quasi-inverses that can be analytically characterized. For ex-ample, a strictly positive matrix with zero diagonal elements is not aquasi-inverse of any nonnegative matrix. The dyadic product of twononnegative vectors having the same dimension always has a quasi-inverse that is a dyadic product [77, 76]. This quasi-inverse notion isused together with optimization reformulation techniques in Chapter 5to derive convex relaxations and to identify special cases of nonconvexproblems that can be solved optimally in polynomial time.
2.4 Nonlinear Perron-Frobenius Theory
We now turn our attention to the extension and generalization of thePerron-Frobenius theorem (Theorem 2.1). The classical linear Perron-Frobenius theorem for the positive operator, Theorem 2.1 as expoundedin [63, 35], has been significantly extended and generalized in mathe-matics since the 1960s (e.g., see Chapter 16 in [5], [55]). There havebeen various characterization of the nonlinear Perron-Frobenius theorythat can be found in the mathematics literature [4, 59, 49, 50, 9, 3, 55].
2.4. Nonlinear Perron-Frobenius Theory 127
In the following, we describe some extensions to the linear Perron-Frobenius theorem, and highlight those version of the nonlinear Perron-Frobenius theory in [50] that will be useful to the wireless networkoptimization problems considered in the monograph.
First, the following result extends the Perron-Frobenius theorem toa linear matrix pencil version.
Lemma 2.6 ([4, 59]). Let A,B ∈ RL×L with B−A nonsingular, and(B−A)−1A (entrywise) nonnegative and irreducible. Then there existsλ ∈ (0, 1) and a positive vector z satisfying Az = λBz. The eigenvalueλ associated with the nonnegative eigenvector is the maximum realeigenvalue in (0, 1), and is given by
λ = ρ((B−A)−1A)
(1 + ρ((B−A)−1A)) .
It is easy to see that Lemma 2.6 particularizes to the linear Perron-Frobenius theorem, i.e., Theorem 2.1, whenever B is an identity matrix,i.e., B = I, and A is an irreducible and nonnegative matrix.
Next, we introduce in the following a nonlinear Perron-Frobeniustheory due to Krause in his work [49, 50, 51].
We begin with the definition of a concave self-mapping given in [50]as follows.
Definition 2.2 (Concave Self-mapping [50]). A mapping f : K → K isconcave if
f(ac + (1− a)z) ≥ af(c) + (1− a)f(z) ∀ c, z ∈ K, a ∈ [0, 1],
and monotone if 0 ≤ c ≤ z implies 0 ≤ f(c) ≤ f(z).
Let ‖ · ‖ be a norm on RL that is monotone, i.e., ‖c‖ ≤ ‖z‖. Aconcave self-mapping of K is monotone on K and continuous on theinterior of K with respect to ‖ · ‖ [50].
Note that any concave self-mapping of K is in K and it is monotoneand continuous [51].
Now, the following result, as established by Krause in his work[49, 50, 51], extends the Perron-Frobenius theorem (Theorem 2.1) to apositive concave self-mapping version.
128 Mathematical Preliminaries
Theorem 2.7 (Krause’s theorem [50]). Let ‖ · ‖ be a monotone norm onRL. For a concave mapping f : RL+ → RL+ with f(z) > 0 for z ≥ 0, thefollowing statements hold. The conditional eigenvalue problem f(z) =λz, λ ∈ R, z ≥ 0, ‖z‖ = 1 has a unique solution (λ∗, z∗), where λ∗ > 0,z∗ > 0. Furthermore, limk→∞ f̃(z(k)) converges geometrically fast2 toz∗, where f̃(z) = f(z)/‖f(z)‖.
Naturally, a notable special case of Theorem 2.7 is when f(z) = Fzwhere F is an irreducible nonnegative square matrix. This special caseis, of course, the linear Perron-Frobenius theorem, i.e., Theorem 2.1.
Another special case of Theorem 2.7 is the following result:
Lemma 2.8 (Conditional eigenvalue [9], Corollary 13). Let A be a non-negative matrix and b be a nonnegative vector. If ρ(A+b1>) > ρ(A),then the conditional eigenvalue problem λs = As + b, λ ∈ R, s ≥0,
∑l sl = 1, has a unique solution given by λ = ρ(A + b1
>) and sbeing the unique normalized Perron eigenvector of A + b1> .
We now state the following result in [72, 74] that is derived bycombining the above conditional eigenvalue result, i.e., Lemma 2.8, andthe Friedland-Karlin inequality result in [34, 32] (see Theorem 2.3).
Lemma 2.9. Let A ∈ RL×L be an irreducible nonnegative matrix, b ∈RL×1 a nonnegative vector and ‖·‖ a norm on RL with a correspondingdual norm ‖ · ‖D. Then,
log ρ(A + bc>∗ ) = max‖c‖D=1log ρ(A + bc>)
= maxλ≥0,1>λ=1
min‖p‖=1
L∑l=1
λl log(Ap + b)l
pl(2.9)
= min‖p‖=1
maxλ≥0,1>λ=1
L∑l=1
λl log(Ap + b)l
pl, (2.10)
where the optimal p in (2.9) and (2.10) are both given by x(A + bc>∗ ),2Let ‖ · ‖ be an arbitrary vector norm. A sequence {p(k)} is said to converge
geometrically fast to a fixed point p′ if and only if ‖p(k) − p′‖ converges to zerogeometrically fast, i.e., there exists constants A ≥ 0 and η ∈ [0, 1) such that ‖p(k)−p′‖ ≤ Aηk for all k [8].
2.4. Nonlinear Perron-Frobenius Theory 129
and the optimal λ in (2.9) and (2.10) are both given by x(A + bc>∗ ) ◦y(A + bc>∗ ).
Furthermore, p = x(A + bc>∗ ) is the dual of c∗ with respect to‖ · ‖D.3
Lemma 2.9 is a general version of the Friedland-Karlin spectralradius minimax characterization in [34, 32]. In particular, if b = 0,we obtain (2.5), i.e., the Perron-Frobenius eigenvalue characterizationvia the Donsker-Varadhan’s variational principle (cf. Theorem 3.2 in[32]). Lemma 2.9 also characterizes an interesting duality relationshipof the Perron-Frobenius eigenvalue and its eigenvectors in the sense ofLagrange duality.
Theorem 2.7 and its generalization (e.g., see Theorem 4.4 in Chap-ter 4) are extremely useful for solving the wireless network optimizationproblems in this monograph. The generalization to nonlinear positivemonotone self-mappings and connecting them to mathematical toolsin nonnegative matrix theory can potentially provide new analyticalinsights to solving problems in many other engineering applications.
3A pair (x,y) of vectors of RL is said to be a dual pair with respect to ‖ · ‖ if‖y‖D‖x‖ = y
>x = 1.
3Max-min Fairness Optimization
In this chapter, we describe how the nonlinear Perron-Frobenius theorycan be used to solve two representative problems: the max-min SINRproblem under the static transmission channel model in [1, 58, 76, 79,78, 72, 77, 97] and the min-max outage probability problem under thestochastic channel fading model in [45, 72, 74].
3.1 Max-min SINR Fairness
The first and most basic version of the max-min SINR problem underthe static transmission channel model was formulated as an applicationfor power control in satellite communication networks by Aein in 1973[1]. However, only the interference-limited case was completely solvedby Aein in [1]. Since then, the max-min SINR problem finds many ap-plications in different wireless networks (such as wireless cellular andcognitive radio networks) and involves various optimization extensionsrelated to transmission strategy requirements such as transmit beam-forming or transmission scheduling.
We first consider a general formulation of the max-min SINR prob-lem with a single power constraint before discussing its other extensionsand special cases. Let β be a given positive vector, where the lth entry
130
3.1. Max-min SINR Fairness 131
βl is assigned to the lth link to reflect some priority relative to theother users. A bigger βl value means a higher priority.
Suppose that there are L users in the wireless network. Considerthe following max-min weighted SINR problem [90, 58, 77, 76]:
maximize minl
SINRl(p)βl
subject to a>p ≤ P̄ , p ≥ 0,variables: p.
(3.1)
Even though (3.1) is nonconvex, we describe how it can be solvedoptimally and analytically. We shall use the notations introduced inChapter 1 and assume that F in (1.3) is irreducible. This assumptioncan be easily satisfied by a sufficient condition that Flj > 0 for alll 6= j, i.e., all the users can interfere with one another. Let us definethe following nonnegative matrix
B = F + (1/P̄ )va> . (3.2)
We now show that the spectra of the product of a diagonal nonneg-ative matrix and B in (3.2), i.e., diag(β)B, (particularly, its Perron-Frobenius eigenvalue and eigenvectors) will be useful to obtain theanalytical solution to (3.1) as well as for analyzing a computationalalgorithm to solve (3.1) numerically in the following.
3.1.1 Optimal solution and algorithm
A closed form solution to (3.1) can be obtained by exploiting a connec-tion between the Perron-Frobenius theory and the algebraic structureof (3.1).
Lemma 3.1. The optimal value and solution of (3.1) is given by
1/ρ(diag(β)B)
and(P̄ /a>x(diag(β)B)) x(diag(β)B)
respectively.
132 Max-min Fairness Optimization
Note that the optimal power in Lemma 3.1 can also be expressedas
p = (ρ(diag(β)B)I− F)−1 v. (3.3)
The following algorithm computes the solution given in Lemma 3.1.We let k index discrete time slots.
Algorithm 1 Max-min Weighted SINR
1. Update power p(k + 1):
pl(k + 1) =(
βlSINRl(p(k))
)pl(k) ∀ l. (3.4)
2. Normalize p(k + 1):
p(k + 1)← p(k + 1) · P̄ /a>p(k + 1). (3.5)
Corollary 3.2. Starting from any initial point p(0), p(k) in Algo-rithm 1 converges geometrically fast to the optimal solution of (3.1),(P̄ /a>x(diag(β)B))x(diag(β)B).
3.1.2 Proof
There can be several approaches to proving Lemma 3.1. Let the optimalsolution and the optimal value in (3.1) be p∗ and τ∗ respectively. Akey observation is that the weighted SINR values for all the users areequal at optimality. This implies, at optimality of (3.1),
p∗l∑j 6=l
Fljp∗j + vl
= βlτ∗ (3.6)
for all l. In matrix form, (3.6) can be rewritten as
(1/τ∗)p∗ = diag(β)Fp∗ + diag(β)v(a>p∗/P̄ ), (3.7)
where we also use the fact that∑l alp
∗l = P̄ at optimality. By the
linear Perron-Frobenius theorem, this shows that p∗ = x(diag(β)(F +
3.1. Max-min SINR Fairness 133
(1/P̄ )va>)) (unique up to a scaling constant) is a fixed point of (3.7).Other approaches to construct a proof for Lemma 3.1 include the non-linear Perron-Frobenius theory in [9, 50] (e.g., see [75, 76] in usingLemma 2.8 in Chapter 2), the Lagrange duality of geometric program-ming in [75] and the optimal value characterization in [58].
Remark 3.1. Let us address an open issue in [52]. A special case of (3.1)is when β = 1 and when P in (3.1) is given by (1.8), which correspondsto a max-min SINR problem for a macro-small cell network studied in[52]. In particular, (1.8), written in a general form as a>p ≤ 1 forsome positive a, can be associated with a weighted `-1 monotone norm(‖diag(a) · ‖1), and this permits the use of Theorem 2.7 (cf. [75, 76]and also Table 3.1). Its analytical closed-form solution is given by p =x(F + va>) (up to a scaling constant). In addition, the fixed-pointiteration (essentially Algorithm 1) given by
p(k + 1) = Fp(k) + va>(Fp(k) + v)
(3.8)
converges geometrically fast to the optimal solution of the macro-smallcell problem in [52], thereby resolving an open issue in [52].
Another interesting perspective to solving (3.1) is a reformulationtechnique that rewrites (3.1) to another optimization problem that de-termines the optimal achieved SINR values of all the different users. Es-sentially, this reformulates (3.1) as solving an inverse eigenvalue prob-lem as described in Chapter 2. Once these optimal SINR values aredetermined, they are then used to recover the optimal power solution.In particular, this reformulation technique turns (3.1) to solving thefollowing convex optimization problem:
maximize w>ηsubject to log ρ(diag(eη)B) ≤ 0,variables: η,
(3.9)
where w is intentionally chosen to be x(diag(β)B) ◦ y(diag(β)B) in(3.9). After we have obtained the optimal η by solving (3.9), the opti-mal power solution is then given by
p = (I− diag(eη)F)−1 diag(eη)v. (3.10)
134 Max-min Fairness Optimization
or, simply,p = x(diag(β)B) (3.11)
as it should be.
3.1.3 Interference-limited Case
Let us consider the special case of interference-limited scenario, i.e., nothermal noise and no power constraint. In fact, this interference-limitedspecial case is the very first version of the max-min SINR problem for-mulated in 1973 by Aein in [1] to balance the signal-to-interference ratioof multibeam satellite systems1 (see [1, 2, 60]), and then subsequentlybeing adopted in wireless cellular networks [94, 87, 37, 48, 67, 58].
Consider the interference-limited special case problem:
maximize minl
Gllpl∑j 6=l
Gljpj
subject to p ≥ 0,variables: p.
(3.12)
It is immediate, notably using the Collatz-Wielandt Theorem ashas been shown in [1], that the optimal value and the optimal solutionto (3.12) can be analytically given by 1/ρ(F) and the Perron-Frobeniusright eigenvector x(F) respectively. Furthermore, the optimal solutioncan be computed using the power method in linear algebra. Indeed,the power control work in [1, 2, 60, 94, 87, 37, 67] proposed iterativepower control algorithms that are inspired by the power method inlinear algebra. Let us briefly review these algorithms in the following.
Now, the power control algorithm proposed in [94] (called the dis-tributed balancing algorithm), when written in vector form, is Algo-rithm 2 with the matrix A in (3.13) being a square matrix with unitdiagonal entries and off-diagonal elements given by Gij/Gii < 1, i 6= j(with a Perron-Frobenius eigenvalue strictly greater than one). A par-ticular choice to update the scalar coefficient is given in [94, 67]
1In these earlier literature on satellite systems for space communications,the signal-to-interference ratio is more commonly known as the carrier-power-to-interference ratio. This problem is thus known as balancing the carrier-power-to-interference ratio or signal to interference ratio [1, 2, 60, 94, 87, 37, 67].
3.1. Max-min SINR Fairness 135
Algorithm 2 Signal-to-Interference Ratio Balancing
1. Update power p(k + 1):
p(k + 1) = c(k) ·Ap(k). (3.13)
2. Update the positive scalar coefficient c(k + 1) appropriately.
as c(k) = 1/maxl=1,...,L pl(k). On the other hand, consider an al-ternative choice of the matrix A in (3.13) given by F and c(k) =1/maxl=1,...,L pl(k) in [60, 37, 67], then the convergence performanceof this algorithm (called the distributed power control algorithm in[37]) to x(F) can be greatly enhanced. In particular, different choicesof A in (3.13) lead to different spectrum, each of which differs in theratio of the absolute values of the largest and the second largest eigen-values that governs the convergence rate of the power method (henceAlgorithm 2). Different choices of updating c(k + 1) also affects theoverall convergence behavior. We refer the reader to [37, 87, 48, 67] formore details on the algorithms and their performance comparisons.
3.1.4 Transmit Beamforming by Extended Matrix Approach
Let us consider a special case of (3.1) with a = 1 (a single total powerconstraint) and β = 1. This special case is typically used to model thedownlink problem in a wireless cellular network. A downlink transmis-sion means that data information is transmitted from the base stationand received at the mobile users. By the same token, it is also valid toconsider the uplink problem when the transmission direction is reversed,i.e., information is transmitted from the mobile users and received atthe base station. It is often assumed that the channel gain parame-ters for the uplink problem are symmetrical to the downlink problem.The downlink problem typically considers jointly optimizing both thetransmit powers and the transmit antenna beamformers.
The solvability of both the uplink and downlink problems by thenonlinear Perron-Frobenius theory were studied in [76, 77, 97]. Prior to
136 Max-min Fairness Optimization
the nonlinear Perron-Frobenius theory approach in [76, 77, 97], the au-thors in [90] proposed the extended matrix approach to solve the down-link problem in (3.1). We outline below this approach in [90] to solve(3.1) that is mainly centralized. On the other hand, Algorithm 1 ex-ploits an algorithm in [31] (cf. Step 1 of Algorithm 1) and is distributed.The extended matrix approach first introduced in [90] was later usedin [10, 11] for designing downlink beamforming algorithms. We referthe reader to Chapter 7.3 in [22] for these related discussions. We nowdescribe how this extended matrix approach in [90] can be connected tothe nonlinear Perron-Frobenius theory approach for this special case.
The idea in [90] is to construct an extended matrix (see E below)such that the problem in (3.1) has an optimal value and an optimalpower vector p?, respectively, given by 1/ρ(E) and the vector thatcontains the first L elements of the eigenvector x(E) (with (x(E))L+1 =1). This extended matrix is given by:
E =[
F v(1/P̄ )1>F (1/P̄ )1>v
]. (3.14)
In particular, observe that E can be decomposed as
E =[
I 0(1/P̄ )1> 1
] [F + (1/P̄ )v1> 0
0> 0
] [I 0
(1/P̄ )1> 1
]−1(3.15)
whose characteristic equation is therefore
det([
F + (1/P̄ )v1> 00> 0
])= 0. (3.16)
This thereby implies that the spectrum of E is identical to that of Bin addition to a zero eigenvalue. Hence, we deduce that
ρ(E) = ρ(B) (3.17)
and
x(E) =[
x(B)1
], (3.18)
where 1>x(B) = P̄ .
3.1. Max-min SINR Fairness 137
Now, using the fact that the optimal max-min SINR value is unique(and ρ(B) = ρ(E)) and the above requirement in [90] that [p? 1]> =x(E), we have
ρ(B) = 1P̄
1>Fp? + 1P̄
1>v. (3.19)
From an algorithm design perspective, it was shown in [10] thatthe uplink-downlink duality can be combined with the extended ma-trix approach in [90] to solve the downlink problem in (3.1). Brieflyspeaking, the uplink-downlink duality theory states that, under a sametotal power constraint for all the users, the achievable SINR region for adownlink transmission with joint transmit beamforming and power con-trol optimization is equivalent to that of a reciprocal uplink transmis-sion with joint receive beamforming and power control optimization. Inparticular, the optimal receive beamformers in the uplink are the opti-mal transmit beamformers in the downlink and, in fact, take the form oflinear minimum mean-square error (LMMSE) filters. The uplink prob-lem does not have the beamformer coupling difficulty associated withthe downlink (hence easier to solve), and is first solved for the LMMSEbeamformers. The optimal downlink transmit power is then computedby keeping these LMMSE beamformers fixed. In other words, anotherextended matrix is constructed for the uplink problem given by:
Ê =[
F> v(1/P̄ )1>F> (1/P̄ )1>v
], (3.20)
where the authors in [10] showed that the first L elements of theeigenvector x(Ê) (with (x(Ê))L+1 = 1) yields the uplink powervector (denote that by q) that can be used to compute the LMMSEbeamformers iteratively (see Table I in [10]).
For the general MIMO case, the max-min SINR problem with trans-mit beamforming has been studied in [86] by a conic programming ap-proach that in general requires a centralized algorithm (interior-pointmethod) to solve the conic programs. Using the uplink-downlink dual-ity, the authors in [86] also proposed a distributed heuristic algorithm(to update the uplink power q) whose convergence proof was later es-tablished using the nonlinear Perron-Frobenius theory in [16, 17] forthe MISO special case. Other related work with joint optimization can
138 Max-min Fairness Optimization
be found in [26, 41, 62, 43] for a beamforming communication systemand in [89] for a time-reversal communication system.
3.1.5 Uplink and Downlink Duality by Nonlinear Perron-FrobeniusTheory
Continuing on the discussion of solving the total-power constrainedproblem for the MISO case, we highlight how the uplink-downlink du-ality that connects both the downlink and uplink problems can beestablished using the Friedland-Karlin inequalities in Chapter 2. Thisfact can be exploited to shed further insights to these max-min prob-lems and for designing distributed algorithms.
Let us consider Lemma 2.9 in Chapter 2. In particular, let A =diag(β)F, b = (1/P̄ )diag(β)v and c∗ = 1 in Lemma 2.9 to deduce thatthe optimal SINR allocation in (3.1) is a weighted geometric mean ofthe optimal SINR, where the weights are the normalized Schur productof the uplink power and the downlink power (i.e., the Perron-Frobeniusright and left eigenvectors of diag(β)B, respectively):2
L∏l=1
(SINRl(p)/βl)plql/(βlvl) = 1/ρ(diag(β)B). (3.21)
Furthermore, both the optimal uplink and the downlink power formdual pairs with the vector (1/P̄ )1, i.e., (p, (1/P̄ )1) and (q, (1/P̄ )1)are dual pairs with respect to ‖ · ‖1. Finally, we summarize in Fig.3.1 the analytical relationship between this uplink-downlink dualitywith the nonlinear Perron-Frobenius theorem and the Friedland-Karlinminimax characterization given in Section 3.1.5. We refer the reader to[90, 76, 10, 16, 41, 97] for more discussions on the uplink-downlinkduality for wireless max-min fairness optimization problems.
In summary, there are several insights from this nonlinearPerron-Frobenius theory approach: The spectrum of an appropriately-constructed nonnegative matrix or an appropriately-identified positive
2The normalization of the Schur product is done such that∑
lplql/(βlvl) = 1.
The uplink and the downlink powers can be obtained from a normalized sub-vectorof the Perron-Frobenius right and left eigenvectors of a (L+ 1)× (L+ 1) extendedmatrix in [90, 10] or from that of the L× L matrix diag(β)B in (3.2).
3.2. Min-max Outage Probability Fairness 139
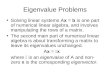
Uplink-downlink Duality Correspondence
Downlink Uplinkp = x(diag(β)B) ↔ q = x(diag(β)B>)
= diag(β)y(diag(β)B)SINRl(p)
βl= 1
ρ(diag(β)B) ↔ˆSINRl(q)βl
= 1ρ(diag(β)B> )
λ = p ◦ diag(β)−1q ↔ λ = q ◦ diag(β)−1p(p, c∗ = (1/P̄ )1) ↔ (q, c∗ = (1/P̄ )1)LMMSE Transmit ↔ LMMSE Receive
Figure 3.1: The uplink-downlink duality characterized through the nonlinearPerron-Frobenius theorem and the Friedland-Karlin spectral radius minimax theo-rem. The equality notation used in the equations denotes equality up to a scalingconstant.
function can provide an analytical characterization of the optimalityto these nonconvex max-min problems. Furthermore, it also provides asystematic framework to design efficient distributed algorithms (i.e., it-erative algorithms that resemble the power method in linear algebra). Inaddition, the overall performance of these distributed algorithms canbe rigorously evaluated. There are also various deep insights of thisnonlinear Perron-Frobenius theory approach such as its connection toduality in optimization theory. Let us demonstrate this using anotherfairness optimization problem in the following.
3.2 Min-max Outage Probability Fairness
3.2.1 Worst Outage Probability Minimization
Consider the stochastic channel fading model. The problem of mini-mizing the worst outage probability can be formulated as
minimize maxl=1,...,L
P (SINRl(p) < βl)
subject to p ∈ P,variables: p.
(3.22)
Let us denote the optimal worst outage probability, i.e., the optimal
140 Max-min Fairness Optimization
value of (3.22), by O?.Assuming independent Rayleigh fading at all the signals, the outage
probability of the lth user can be given analytically by [45]:3
P (SINRl(p) < βl) = 1− e−vlβlpl
L∏j=1
(1 + βlFljpj
pl
)−1. (3.23)
Observe that the probability of successful transmission, i.e., thecomplement of (3.23), is simply the product of two factors, namely,e−vlβl/pl and
∏Lj=1
(1 + βlFljpjpl
)−1, which are the probability of suc-
cessful transmission in a noise-limited Rayleigh-fading channel (i.e., nointerference) and an interference-limited Rayleigh-fading channel (i.e.,no additive white Gaussian noise) respectively.
By using (3.23) and defining a deterministic function:
φl(p) = 1− e−vlβlpl
L∏j=1
(1 + βlFljpj
pl
)−1∀ l, (3.24)
then the stochastic program in (3.22) simplifies to a deterministic prob-lem:
minimize maxl=1,...,L
φl(p)
subject to p ∈ P.(3.25)
Note that (3.25) is always feasible as long as the given power bud-get constraints in (1.7) and (1.8) are feasible, and its optimal solutionis strictly positive. Previous work in the literature, e.g., [45], only con-sidered (3.25) for the interference-limited case, i.e., v = 0 and withoutany power constraint. In this special case, [45] showed that (3.25) canbe reformulated as a geometric program (a special class of convex op-timization [27, 15]), and then solved numerically by the interior pointmethod [15].
In the following, we give a reformulation of (3.25) as a convex opti-mization problem (not a geometric program but reduces to one in the
3A closed form expression was first derived in [91], but we use this anotherequivalent form derived in [45].
3.2. Min-max Outage Probability Fairness 141
interference-limited special case). By exploiting the nonlinear Perron-Frobenius theory, the authors in [72, 74] proposed a fast algorithm4 (noparameter tuning whatsoever and orders of magnitude faster than stan-dard convex optimization algorithms such as the interior point method)to solve (3.25) optimally. As a by-product, it resolves an open problemon the convergence of a previously proposed heuristic algorithm in [45].Furthermore, we characterize analytically the optimal value and solu-tion of (3.25) in terms of a Perron-Frobenius eigenvalue and eigenvectorof a specially constructed nonnegative matrix respectively.
Let us introduce an auxiliary variable τ and write (3.25) in theepigraph form (augmenting the constraint set with additional L con-straints):
minimize τ
subject to 1− e−vlβlpl
L∏j=1
(1 + βlFljpj
pl
)−1≤ τ ∀ l,
p ∈ P,variables: p, τ.
(3.26)
Let us introduce a new variable
α = − log(1− τ), (3.27)
and then, by rewriting the L augmented constraints in (3.26), (3.26) isequivalent to the following problem:
minimize α
subject to vlβlpl
+L∑j=1
log(
1 + βlFljpjpl
)≤ α ∀ l,
p ∈ P,variables: p, α.
(3.28)
We call the first L constraints of (3.28) the outage constraints, anddenote the optimal solution to (3.28) by (p?, α?). Note that p? is alsothe optimal solution to (3.25).
4Some key computational considerations are the extremely fast signal processingrequirement at the transceiver chip and the decentralized environment.
142 Max-min Fairness Optimization
Now, (3.28) is nonconvex in (p, α). However, by making a logarith-mic change of variable in p, i.e., p̃l = log pl for all l, (3.28) can beconverted into the following convex optimization problem in (p̃, α):5
minimize α
subject to vlβle−p̃l +L∑j=1
log(1 + βlFljep̃j−p̃l
)≤ α ∀ l,
ep̃ ∈ P,variables: p̃, α.
(3.29)
Though solving the nonconvex problem in (3.28) is equivalent tosolving the convex problem6 in (3.29), we shall use a nonlinear Perron-Frobenius theory-based approach to solve (3.28) optimally. Using non-negative matrix theory, we then connect (3.28) to the Lagrange dualityof (3.29) (cf. Lemma 2.9 later) to shed further insights to the solution.
Lemma 3.3. At optimality of (3.28), the outage constraints in (3.28)are tight:
vlβlp?l
+L∑j=1
log(
1 +βlFljp
?j
p?l
)= α? ∀ l. (3.30)
Furthermore, if P = {p | a>p ≤ P̄}, we have a>p? = P̄ , and ifP = {p | pl ≤ p̄ ∀ l}, we have p?i = p̄ for some i.
Proof. First, we note that it has been pointed out in [45] that all theoutage constraints are tight for the interference-limited case, i.e., v = 0.We prove the first part of Lemma 3.3 for the general case here. Clearly,the function on the lefthand side of the lth outage constraint in (3.28)is monotone increasing in pj , j 6= l, and monotone decreasing in pl.Suppose the lth constraint is not tight at optimality, i.e., vlβl/p?l +
5Note that (3.28) cannot be rewritten as a geometric programming formulation,as has been done in [45]. Nevertheless, after a logarithmic change of variables, aconvex form can still be obtained as shown here.
6The optimization problem in (3.29) is convex, because the objective func-tion is linear and the constraint set is convex. In particular, the function∑L
j=1 log(1 + βlFljep̃j−p̃l
)is convex because the log-sum-exp function is convex
[15]. Thus, the constraint set in (3.29) that consists of exponentials and log-sum-exp functions is a convex one.
3.2. Min-max Outage Probability Fairness 143
∑Lj=1 log
(1 + βlFljp
?j
p?l
)< α?. Then, we choose a feasible power pl < p?l
such that the evaluated value of vlβl/pl+∑Lj=1 log
(1 + βlFljp
?j
pl
)is still
less than α?. Now, vjβj/p?j +∑k 6=l log
(1 + βjFjkp
?k
p?j
)+log
(1 + βjFjlplp?j
)for all j 6= l. This implies that the value of α can be further decreased,i.e., α < α?, which contradicts the assumption. Hence, the lth con-straint must be tight at optimality for all l.
We next prove the second part for P = {p | pl ≤ p̄ ∀ l}.Suppose p?l < p̄ at optimality for all l. Let a positive scalar a =minl=1,...,L p̄/p?l > 1, and choose a feasible power p = ap?, whichevaluates the outage constraints as vlβl/pl +
∑j log
(1 + βlFljpjpl
)=
vlβl/ap?l +∑Lj=1 log
(1 + βlFljp
?j
p?l
)< vlβl/p
?l +∑Lj=1 log
(1 + βlFljp
?j
p?l
)=
α? for all l. This implies that α can be further decreased, i.e., α < α?,which contradicts the assumption. Hence, p?i = p̄ for some i. A similarproof can be given when P = {p | a>p ≤ P̄} and is omitted.
Hence, by using Lemma 3.3, we have the optimal worst outageprobability
O? = φl(p?) ∀ l, (3.31)and also O? = 1− e−α? .
Remark 3.2. Now, finding the fixed-point solution in (3.30) in Lemma3.3 may seem nontrivial. However, by exploiting a connection betweenthe nonlinear Perron-Frobenius theory in [9, 50] (that includes unveilinga hidden convexity in (3.30)), we give an analytical solution to (3.30)and, equivalently, the optimal value and the optimal solution of (3.25)in Section 3.3 (see Table 3.1 later). Interestingly, α? in (3.28) (equiva-lently the optimal value of (3.25)) and the optimal solution p? can beviewed as a nonlinear Perron-Frobenius eigenvalue and its nonlineareigenvector.7
7In summary, the intuition of using the nonlinear Perron-Frobenius theory tosolve nonconvex optimization problem such as that in (3.25) lies in examining thefixed-point equations corresponding to the set of primal constraints that are tightat optimality. In particular, the fixed-point equations exhibit special properties suchas nonnegativity, monotonicity and convexity.
144 Max-min Fairness Optimization
The authors in [72, 74] proposed the following algorithm (with ge-ometric convergence rate and no parameter tuning whatsoever) thatcomputes the optimal solution of (3.28). We let k index discrete timeslots.
Algorithm 3 Worst Outage Probability Minimization
1. Update power p(k + 1):
pl(k + 1) = − log (1− φl(p(k))) pl(k) ∀ l. (3.32)
2. Normalize p(k + 1):
p(k + 1)← p(k + 1) · P̄a>p(k + 1)
if P = {p | a>p ≤ P̄}. (3.33)
p(k + 1)← p(k + 1) · p̄maxj=1,...,L
pj(k + 1)if P = {p | pl ≤ p̄ ∀ l}. (3.34)
Theorem 3.4. Starting from any initial point p(0), p(k) in Algorithm3 converges geometrically fast to the optimal solution of (3.25).
Proof. Let us write the left-hand side of the lth outage constraint in(3.28) as fl(p)pl ≤ α, where
fl(p) = vlβl +L∑j=1
pl log(
1 + βlFljpjpl
). (3.35)
In the following, we show that
f(p) = [f1(p), f2(p), . . . , fL(p)]> (3.36)
is a positive concave self-mapping on the standard cone K = RL+.We first show that f(p) = [f1(p), f2(p), . . . , fL(p)]
> is a conemapping8 with respect to the interior of K. Taking the derivative of
8 Recall the definition of concave self-mapping in Chapter 2. A self-mapping f of a
3.2. Min-max Outage Probability Fairness 145
fl(p) with respect to pl, the jth entry of the first derivative Ofl(p) isgiven by:
(Ofl(p))j =L∑k=1
(log
(1 + βlFlkpk
pl
)− βlFlkpkpl + βlFlkpk
), if j = l
βlFljplpl + βlFljpj
, if j 6= l.
(3.37)
Since z/(1+z) ≤ log(1+z) for z ≥ 0, (Ofl(p))l ≥ 0. Thus, (Ofl(p))j ≥0 for all j, i.e., fl(p) increases monotonically in p. Now, we state thefollowing result [51].
Theorem 3.5 (Proposition 3.2 in [51]). Let K be the set of cone map-pings with respect to the interior of the positive standard cone. Supposef : K → K is differentiable and the following inequalities hold for thecomponent mappings: fl : K → R+ for all l:
∑j pj | (Ofl(p))j |≤
fl(p) on K. Then f ∈ K.
Now, we have
L∑j=1
pj | (Ofl(p))j | =∑Lj=1 pj(Ofl(p))j
=L∑k=1
(pl log
(1 + βlFlkpk
pl
)− βlFlkpkplpl + βlFlkpk
)+∑j 6=l
βlFljplpjpl + βlFljpj
=L∑k=1
pl log(
1 + βlFlkpkpl
)≤ fl(p).
(3.38)Hence, by Theorem 3.5, fl(p) is a strictly positive and monotone conemapping on K.
cone K is called a cone mapping if for every c, z ∈ K and 1 ≤ λ from λ−1c ≤ z ≤ λc,it follows that λ−1f(c) ≤ f(z) ≤ λf(c), that is a cone mapping f maps any interval[λ−1z, λz] into [λ−1f(z), λf(z)].
146 Max-min Fairness Optimization
We next show that f(p) = [f1(p), f2(p), . . . , fL(p)]> is a con-
cave self-mapping. Taking the second derivative, we obtain the HessianO2fl(p) with entries given by:
(O2fl(p))jk =
− (βlFlj)2pj
(pl + βlFljpj)2, if j = k, k 6= l
(βlFlj)2pj(pl + βlFljpj)2
, if j 6= k, either k or j = l
−L∑
m=1
(βlFlm)2p2m/pl(pl + βlFlmpm)2
, if j = k = l
0, otherwise.
(3.39)
Now, the Hessian O2fl(p) is indeed negative definite: for all realvectors z, we have
z>O2fl(p)z = −1pl
L∑k=1
(βlFlk)2(plzk − pkzl)2
(pl + βlFlkpk)2
< 0.(3.40)
Another proof is to observe that t log(1 + x/t) is strictly concavein (x, t) for strictly positive t, as it is the perspective function of thestrictly concave function log(1+x) [15]. Hence, fl(p) is a sum of strictlyconcave perspective function, and therefore f(p) is strictly concave inp.
Also, observe that fl(p) is monotone increasing in p as has beenshown earlier. We are now ready to apply the nonlinear Perron-Frobenius theorem given in Theorem 2.7 in Chapter 2. Note that theweighted sum and individual power constraints in (1.7) are the mono-tone weighted `1 norm constraint ‖diag(a)p‖1 = P̄ and the `∞ normconstraint ‖p‖∞ = p̄ respectively. By Theorem 2.7, the convergence ofthe iteration
p(k + 1) = f(p(k))‖f(p(k))‖ (3.41)
to the unique fixed point p = f(p)/‖f(p)‖ is geometrically fast, regard-less of the initial point.
3.2. Min-max Outage Probability Fairness 147
Remark 3.3. We remark that Algorithm 1 is a purely deterministicalgorithm, and, upon convergence, all the users will transmit at the op-timal power solution keeping the power fixed regardless of the Rayleigh-fading random realization over time. This means that no channel real-ization, e.g., the random variable Rlj for all l, j, is required in the up-date at each iteration. What is needed is only the additive white Gaus-sian noise power and the channel gains Glj for all l, j which is assumedto be fairly static and does not vary at the Rayleigh fading timescale.The update in (3.32) is obtained by applying the nonlinear Perron-Frobenius theory to (3.30) of Lemma 3.3, which is then rewritten usingthe notation given in (3.24). To compute φl(p(k)) in (3.32), the lth usermeasures separately the received interfering power {Fljpj(k)}, j 6= l.The normalization at Step 2 can be made distributed using gossip al-gorithms to compute either maxl=1,...,L pl(k + 1) or a
>p(k + 1) [13].
In the following, we first derive useful bounds to O? given in termsof the problem parameters of (3.25). Then, we solve (3.25) analyticallyin the interference-limited special case without any power constraint,and then extend the analysis to the general case with power constraints.
3.2.2 Worst Outage Probability Bounds
We now develop lower and upper bounds for the worst outage probabil-ity O? using a certainty-equivalent margin (CEM) problem9 as proxy.In particular, the CEM problem replaces the stochastic variation in thedesired signal and the interference of (1.5) by their respective mean val-ues, i.e., replace the random variables in (1.5) by the unit mean. Thisyields a purely deterministic function of powers. We shall refrain fromcalling it a deterministic SINR since it has no physical context meaningin the fading system model considered here. Mathematically, this yieldsthe first optimization problem we have considered in Section 3.1. Let
9The certainty-equivalent margin (CEM) problem, in its simplified case wherevl = 0 for all l and without power constraint, was first used in the seminal work [45]to relate to the worst outage probability problem in the interference-limited specialcase (i.e., assuming no additive white Gaussian noise and no power constraint). Weretain the CEM terminology here to be consistent with [45].
148 Max-min Fairness Optimization
us write down the following problem:
maximize minl=1,...,L
1βl
pl∑j 6=l
Fljpj + vl
subject to p ∈ P, p ≥ 0.
(3.42)
Now, the optimal value and solution of (3.42) can be obtained an-alytically (as has already been shown in Section 3.1), and this allowsus to deduce the following bounds using the CEM analytical optimalvalue (also in terms of the constant problem parameters of (3.28)).
Corollary 3.6. If P = {p | pl ≤ p̄ ∀ l}, the worst outage probability O?satisfies
ρ(diag(β)(F+(1/p̄)ve>i ))1+ρ(diag(β)(F+(1/p̄)ve>i ))
≤ O? = 1− e−α?
≤ 1− e−ρ(diag(β)(F+(1/p̄)ve>i )),
(3.43)
where i = arg maxl=1,...,L
ρ(diag(β)(F + (1/p̄)ve>l )) (3.44)
and α? is the optimal value to (3.28).
Proof. Using the inequalities 1 +∑Ll=1 zl ≤
∏Ll=1(1 + zl) ≤ e
∑Ll=1 zl for
nonnegative z (cf. [45]), a lower and upper bound on α? can be givenby 1/(1 + cem) ≤ α? ≤ 1− e−1/cem, where cem is the optimal value of(3.42) and is analytically given by 1/ρ(diag(β)(F + (1/p̄)ve>i )), wherei is given by (3.44) [75]. The bounds on O? = 1 − e−α? can thus beobtained, hence proving Corollary 3.6.
Remark 3.4. Note that the lower bound in Corollary 3.6 is not neces-sarily the tightest, but the bounds in Corollary 3.6 illustrate that theCEM problem, i.e., the spectral information of a concave self-mappingf(p) = diag(β)(Fp + v) (cf. [75]) can provide useful quick bounds tothe worst outage probability. Corollary 3.6 reduces to a result in [45] inthe interference-limited case. Results similar to Corollary 3.6 can alsobe obtained for the case when P = {p | a>p ≤ P̄}, but is omitted here.
3.2. Min-max Outage Probability Fairness 149
0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
SINR Threshold β
Out
age
Pro
babi
lity
Worst Outage ProbabilityLower BoundUpper Bound
Figure 3.2: The worst outage probability versus the SINR threshold β for asystem with 20 small cell users, where each user has a common SINR threshold β.The corresponding lower and upper bounds in Corollary 3.6 are also illustrated.
Example 3.1. Figure 3.2 plots the worst outage probability and thebounds for a system with 20 small cell users with individual powerconstraints using parameters in [93], where each user has a commonSINR threshold β. We make several observations. First, the worst out-age probability value and its bounds are concave in β. Second, theworst outage probability is very close to its upper bound. In fact, oneobserves that the optimal power p? is also close in value to the optimalsolution of (3.42), i.e., x(diag(β)(F + (1/p̄)ve>i )), where i is given by(3.44) (cf. [75]). Further, for small β, the upper and lower bounds arevery close to each other. This suggests that, in low-powered networks,the CEM solution can give sufficiently good approximation to the worstoutage probability.
3.2.3 Interference-limited Case
We now turn to solve (3.25) analytically for the interference-limitedcase, i.e., v = 0.10 In this case, (3.35) is in addition a primitive positive
10The geometric programming approach in [45] to this interference-limited specialcase is to first rewrite (3.26) as a standard geometric program and then solve itnumerically using the interior point method [15].
150 Max-min Fairness Optimization
homogeneous function of degree one. Next, we define the nonnegativematrix B with the entries (that are functions of p):
Blj ={
0, if l = jplβlpj
log(1 + βlFljpjpl
), if l 6= j. (3.45)
Note that B(p) is irreducible whenever F is. Using (3.45), as shownin [45], we can write the optimal value α? and optimal solution p? of(3.28) in the interference-limited special case as
α? = ρ(diag(β)B(p?)) (3.46)
and p? = x(diag(β)B(p?)) (up to a scaling constant) (3.47)respectively. Thus, p? is a fixed point of
p = 1ρ(diag(β)B(p))diag(β)B(p)p. (3.48)
Further, it is interesting to note the following result of p?.
Corollary 3.7. In the interference-limited case, the optimal power of(3.28), p?, satisfies
p? = arg maxp>0
ρ(diag(β)B(p)). (3.49)
Proof. Using (3.45), we can rewrite the outage constraints in (3.28) inmatrix form as
diag(β)B(p)p ≤ αp. (3.50)Next, we need the Subinvariance Theorem 2.2 stated in Chapter
2 to (3.50) (let A = diag(β)B(p), z be a feasible p and s = α),we have ρ(diag(β)B(p)) ≤ α for any feasible p and α. But α? =ρ(diag(β)B(p?)). Hence, ρ(diag(β)B(p)) ≤ ρ(diag(β)B(p?)). Thisproves Corollary 3.7.
The following method was first proposed in [45] to compute theoptimal solution for the interference-limited case without any powerconstraint:
p(k + 1) = 1ρ(diag(β)B(p(k)))diag(β)B(p(k))p(k). (3.51)
3.3. Duality by Lagrange and Perron-Frobenius 151
The authors in [45] observed that this iteration converges numeri-cally to an acceptable accuracy with a fixed initial vector p(0) =x(diag(β)F) (optimal solution of (3.42) without power constraints andnoise power). The issues of convergence and existence of a fixed pointwere however left open in [45].
Now, Algorithm 3 in fact reduces to an update similar to (3.51)when v = 0, and computes a solution that is equal to the fixed pointof (3.48) up to a scaling constant. The scaling factor in (3.51) tendsto ρ(diag(β)B(p?)) with increasing k. From Theorem 3.4, this meansthat (3.51) converges from any initial point to the fixed point in (3.48)geometrically fast, thus resolving the open issues of convergence andfixed-point existence in [45].
3.3 Duality by Lagrange and Perron-Frobenius
We now show that the optimal value α? and optimal solution p? of(3.28) can be derived analytically from the spectral information of aspecially constructed rank-one perturbation of diag(β)B, where B isgiven in (3.45). The following result is obtained based on Lemma 2.9 inChapter 2 using the nonlinear Perron-Frobenius theory in [9] and theFriedland-Karlin inequality result in Theorem 2.3 given in Chapter 2.
Lemma 3.8. The optimal solution (p?, α?) of (3.28) satisfies
logα? = log ρ(diag(β)(B(p?) + vc>∗ ))= max
‖c‖D=1log ρ(diag(β)(B(p?) + vc>))
= maxλ≥0,1>λ=1
minp∈P
L∑l=1
λl logβl(B(p)p + v)l
pl(3.52)
= minp∈P
maxλ≥0,1>λ=1
L∑l=1
λl logβl(B(p)p + v)l
pl, (3.53)
where the optimal p in (3.52) and (3.53) are both given byx(diag(β)(B(p?)+vc>∗ )) (which is equal to p? up to a scaling constant),and the optimal λ in (3.52) and (3.53) are both given by the Hadamardproduct of x(diag(β)(B(p?) + bc>∗ )) and y(diag(β)(B(p?) + bc
>∗ )).
152 Max-min Fairness Optimization
Furthermore, p = x(diag(β)(B(p?) + vc>∗ )) is the dual of c∗ withrespect to ‖ · ‖D.11
Proof. The proof outline of Lemma 3.8 is to first consider the Lagrangeduality of (3.29) and then apply Lemma 2.9 in Chapter 2.
First, we express the outage constraints in (3.29) using the matrix Band rewrite (3.29) as the following equivalent problem (let α̃ = logα):
minimize α̃subject to log
(βl(vl+B(ep̃)ep̃)l
ep̃l
)≤ α̃ ∀ l,
ep̃ ∈ P,variables: p̃, α̃.
(3.54)
Next, by augmenting only the outage constraints, the partial La-grangian function of (3.54) is given by
L(α̃, p̃,λ) =(
1−L∑l=1
λl
)α̃+
L∑l=1
λl log(βl(vl + B(ep̃)ep̃)l
ep̃l
). (3.55)
Now, the Lagrange dual function of (3.54) is finite only if∑Ll=1 λl = 1
for all feasible λ. Hence, the Lagrange dual function is given by
minα̃,ep̃∈P
L(α̃, p̃,λ) =L∑l=1
λl log(βl(vl + B(ep̃
?)ep̃?)lep̃?l
), (3.56)
where p̃? is the optimal solution to (3.54).Now, we are ready to apply Lemma 2.9 to (3.56). In particular, we
can compute c∗ explicitly depending on the choice of P. For the casewhen P = {p|a>p ≤ P̄}, let A = diag(β)B(p?), b = diag(β)v andc∗ = (1/P̄ )a in Lemma 2.9. For the case when P = {p|pl ≤ p̄ ∀ l},let A = diag(β)B(p?), b = diag(β)v and c∗ = (1/p̄)ei, where i =arg maxl=1,...,L ρ(diag(β)(B(p?) + ve
>l )) in Lemma 2.9.
11A pair (u,v) of vectors of RL is said to be a dual pair with respect to ‖ · ‖ if‖v‖D‖u‖ = v
>u = 1.
3.3. Duality by Lagrange and Perron-Frobenius 153
Note that the optimal dual variable in (3.29) is equal to the optimalλ in (3.52) and (3.53). Using Lemma 2.9, we can now give analyticallythe optimal value and solution of (3.28) when P = {p | pl ≤ p̄ ∀ l}.
Corollary 3.9. The optimal value and solution of (3.28) are given re-spectively by
α? = ρ(diag(β)(B(p?) + (1/p̄)ve>i )
)(3.57)
andp? = x
(diag(β)(B(p?) + (1/p̄)ve>i )
), (3.58)
where i = arg maxl=1,...,L
ρ(diag(β)(B(p?) + (1/p̄)ve>l )
). (3.59)
Furthermore, p?i = p̄ for the i (not necessarily unique) in (3.59).
Remark 3.5. In general, the optimal index i in (3.59) differs from(3.44). The numerical simulations show that both are empirically thesame when the CEM solution is close to p?, especially so in the low-powered regime (cf. Figure 3.2). Unlike (3.59), (3.44) can be computeda priori from the problem parameters.
Table 3.1 summarizes the connection between the Perron-Frobeniu