Embed Size (px)
Citation preview

with your host….
Dr. Hy, the rocket scientist guy

AERO 426, Lecture #5 Spacecraft Dynamics- Questions Addressed
Regarding available and future launch systems, what are the implications for cost versus payload size, weight, etc.?
How can we tell where our spacecraft is ?
What are some simple ways to estimate the motion of spacecraft in the vicinity of a NEA?
How can we plan space trajectories and estimate propulsion system requirements?

Suggested reading:Suggested reading:L&W, Chap.5 intro or P&M, Sect. 3.3 (coordinate systems),L&W, Chap.5 intro or P&M, Sect. 3.3 (coordinate systems),L&W, Sect. 6.1.1 - 6.1.3 or P&M, Sect. 3.6 (Keplerian orbits),L&W, Sect. 6.1.1 - 6.1.3 or P&M, Sect. 3.6 (Keplerian orbits),L&W, Sect. 6.3 (orbit maneuvering),L&W, Sect. 6.3 (orbit maneuvering),L&W, Sect. 17.2 or P&M, Sect. 4.2.1 and 4.3 (rocket L&W, Sect. 17.2 or P&M, Sect. 4.2.1 and 4.3 (rocket
propulsion propulsion and motion),and motion),
L&W, Sect. 17.3 (types of rockets),L&W, Sect. 17.3 (types of rockets),L&W, Sect. 18.2 (launch system data)L&W, Sect. 18.2 (launch system data)

What’s our coordinates? Use Nature’s Gyros!
RES
Jorbit ~ RESX MEVE ~ Const
Orbit plane is fixed
VE
Jspin~ Constant
So, we have two axes that are fixed: The perpendicular to the orbit plane and the axis of rotation of the Earth (which actually nutates once
every 26,000 years)

Ecliptic Pole, Z-axis
Orbit Plane
Actually, in the Ecliptic coordinate system;We use the normal to the orbit plane (called the
Ecliptic Pole) as the Z-axis
In the position of the vernal equinox, the rotation axis
vector is perpendicular
to the Sun-Earth vector and Northern Hemisphere
spring commences
X-axis
Y-axis

Coordinate systems used in space applications
Coordinate Name
Fixed with respect to
Center Z-axis or Pole
X-axis or Ref. Point
Applications
Celestial
(Inertial)
Inertial space
Earth or spacecraft
Celestial Pole
Vernal equinox
Orbit analysis, astronomy,
inertial motion
Earth-fixed Earth Earth Earth pole=celestial
pole
Greenwich meridian
Geolocation, apparent
satellite motion
Spacecraft-fixed
Spacecraft Defined by engineering
drawings
Spacecraft axis toward
nadir
Spacecraft axis in
direction of velocity vector
Position and orientation of
spacecraft instruments
Ecliptic Inertial space
Sun Ecliptic pole Vernal equinox
Solar system orbits,
lunar/solar ephemerides
Lunar The Moon Moon Lunar North pole
Average center of
Lunar Disk
Locating lunar features

Locating Events in Time
The Julian day or Julian day number (JDN) is the integer number of days that have elapsed since the initial epoch defined as noon Universal Time (UT) Monday, January 1, 4713 BC in the Julian calendar.
The Julian date (JD) is a continuous count of days and fractions elapsed since the same initial epoch. The integral part gives the Julian day number. The fractional part gives the time of day since noon UT as a decimal fraction of one day with 0.5 representing midnight UT.
Example: A Julian date of 2454115.05486 means that the date and Universal Time is Sunday 14 January 2007 at 13:18:59.9.
The decimal parts of a Julian date:0.1 = 2.4 hours or 144 minutes or 8640 seconds0.01 = 0.24 hours or 14.4 minutes or 864 seconds0.001 = 0.024 hours or 1.44 minutes or 86.4 seconds0.0001 = 0.0024 hours or 0.144 minutes or 8.64 seconds0.00001 = 0.00024 hours or 0.0144 minutes or 0.864 seconds.
The Julian day system was introduced by astronomers to provide a single system of dates that could be used when working with different calendars. Also, the time separation between two events can be determined with simple subtraction.
To make conversions, several handy web-sites are available; e.g., http://aa.usno.navy.mil/cgi-bin/aa_jdconv.pl

Orbital Dynamics - Made SimpleMost of the time (with many important exceptions) spacecraft orbital dynamics involves bodies that are either (1) very, very small relative to inter-body distances, or (2) are nearly spherically symmetric -- then:
Bodies behave (attract and are attracted) as if they are point masses.
Motion can be described by keeping track of the centers of mass.
Also, most of the time (with many important exceptions) spacecraft orbital dynamics is a two-body problem (the s/c and the Earth, or the s/c and the sun, or, etc.) - so we have two gravitationally attracting point masses, and:
Both bodies move in a plane (the same plane)
Both trace out conic sections with one focus at the total center of mass.
Each body moves periodically on its conic section, tracing and retracing the same curve forever.

Finally, most of the time (with many important exceptions), one of the bodies is much more massive than the other ( the Earth versus a s/c, or the sun versus the Earth, etc.). Then in addition to the above:
The smaller body moves on a conic section with a focus on the larger body's center of mass, which is also approximately the total center of mass.
The motion of the smaller body does not depend on its mass.
The smaller body's motion depends on the gravitational constant, G, and the larger body's mass only through the combination:
= "The Gravitational Parameter" = GM
G = 6.673 x 10-11 m3/ kg-s2
M = Mass of the larger body

Euler Angle Description of the Orbit Plane
xi
zi
yi
i
h
ei
hi
pi
r
i
f
Equitorial Ecliptic plane
Orbit Plane
Periapsis
Longitude of the ascending node
Inclination angle
Argument of the perihelion
True anomaly
i
f
angular momentum vector
ˆ Unit vector along
ˆ Unit vector pointing to perihelion
ˆ ˆ ˆ
e
p e
h
h
h
i h
i
i i i

Orbital Dynamics - Briefly Summarized
vf
d
v0
rmax
parabola
ellipsehyperbola
v0 = vf d(v0)2/
circle
rmin
vmax
For all orbits:
= / rmin
E = v2/2 / r = / 2a a = (rmax + rmin)/ 2Circle:
v = vmax = 1/2 E = E0 = - /2
Ellipse:
rmax = rmin (vmax)2 / (2 - (vmax)2)0 E E0
Parabola: vmax = (2)1/2 =vescape
E = 0
Hyperbola: vmax = v0 [ 1 + (1 + 2)1/2] / , rmin = dv0 / vmax
sin() = /(1 + 2 )1/2
E 0
hyperbola
For bound orbits:3
2a
P

Location of a Body in its Orbit as a Function of Time
2
1 cos
hr
e f
b
f
a F1
E
ae
F2
r
0 0
3
sin ,
Mean anomaly
0,2
2mean angular motion
Orbit period 2
M E e E E K eM
M M n t t
M
nP
aP
Kepler's Equation :
1
2
12tan tan
1 2
1 cos1
e Ef
e
pr
e fp a e

Getting from Earth to a NEA - Patched Conics Method
When S/C crosses asteroid’s activity sphere boundary, subtract the
asteroid’s velocity relative to the sun.This gives initial
conditions for the asteroid-dominated portion of the
rendezvous
When outside the Earth’s activity
sphere, calculate only the S/C orbit around the Sun. (which follows a conic section).
Sphere of Influence of the asteroid:
S/C acceleration due to asteroid > Perturbing acceleration due to the Earth. SI radius given by:RSI RA-E (Masteroid /MEarth)2/5
(Masteroid = 4.6X1010 kg MEarth=5.9737X1024 kg )(Masteroid /MEarth)2/5= 2.2626X10-6
Within SI and ref. frame moving with the asteroid, S/C approx. interacts only with the asteroid.
Asteroid
Earth
Sun

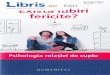
V (km/s) Topography
Mars
Phobos
Earth
Low Mars orbit
Phobos transfer
Deimos transfer
Deimos
Mars transfer
Mars C3
L4/5
GEO
GTO
Earth C3
Sun
LEO
Moon
Lunar orbit9.3 - 10
4.1
4.1
2.5
0.7
1.73.8
1.6
1.61.6
0.2
0.9
0.6
30
0.7
0.7
0.7
0.90.5
0.3
Optional Aerobrake
Orbital location

Low Thrust Transfer ManeuversSuppose we have a very low thrust
engine that provides constant accel-
eration , . It's most efficient to
direct the thrust along the velocity
vector of an initially circular orbit.
In this
A
32
case, the orbit semimajor axis
is slowly varying and approximately
satisfies:
2da A
adt
12 120 0
20
0 00
:
So the time required to go from the initial semimajor axis to the final one is:
1 1, 1 4
Then
t t a aA
aAt t a a
a a

In the previous chart we considered the case of constant acceleration. Now considering constant
thrust, we use the relation between mass flow rate and thrust (see next two charts):
0 0 ,
where is the vehicle mass, and is the constant thrust. Also, substituting into the
previous equation for the semimajor axis, we g
sp
dm Fm t m
dt gI
m F A F m
3 2
00
et:
2
These two equations can be integrated to obtain:
1 1 1 expsp
sp
da Fa
dt m
gI mt t
F gI a a
0
0 0 sp
Fm m t t
gI
Low Thrust Transfer Maneuvers - Continued


Planar Circular Restricted 3-Body Problem(PCR3BP)
• “Restricted” = Gravitational field is determined by two massive bodies (The “primaries”). The third body is too small to affect the primaries.
• “Circular” = The primaries are in circular orbits about the total center of mass
• “Planar” = All three bodies move in the same plane.• Normalized Units:
– Unit of mass = m1+m2
– Unit of length = constant separation between m1and m2
– Unit of time: Orbital period of m1and m2 is 2 (G = 1)
– The only parameter in the system is = m1/(m1+m2)

Unit of distance: L = distance between m1 and m2 (km)Unit of Velocity: V = orbital velocity of m2 (km/s)Unit of time = orbital period of the primaries (s)

Equations of Motion (In the rotating frame)
2 212
1 2
2 22 2 2 21 2
2 1 2
2 212
,
,
where:
1
, 1
Energy Integral:
E= , 2 Jacobi Integral
x x y
y y x
Ux p y p p x
xU
y p x p p yy
U x yr r
r x y r x y
m m m
x y U C E

Planar Circular Restricted Three Body Problem (PCR3BP)

Effective Potential: The Open Realms and the Forbidden Zone

Five Cases of Possible Motions

Types of Orbits in the “Neck” Region

Tangled Trajectories in the Neck Region

Structure of the Neck Region

Global Orbit Structure: Homoclinic/Heteroclinic Chains

Patched 3-Body Method: The Interplanetary Super Highway

Patched 3-Body Method: LL1 to EL2 in 40 days with a single 14m/s V

Patched 3-Body Method: Space Mission Application


Rotational Dynamics of Axisymmetric Rigid Bodies
x
y
z
angular momentumH
precession
angle
x and y axes moment of inertia = A
Z axis inertia = C
2
2
cos onstant
kinetic energy
1 cos2
Precession rate
H C c
T
H C C
C A A
C A
A
spin rate
For we have a problem. When there
are any moveable bodies within the interior,
the precession will excite their motion, and
the rigid body kinetic energy will be drained.
continually. A sta
C A
te of steady axial spin, 0
is actually unstable.

Rotational Dynamics of Axisymmetric Rigid Bodies
2
22
If we start with a pure z-axis spin ( 0). then 0 2 . Since remains constant:
2 1 sin 0
1
Thus as decreases, increases. Ultimately, 2 an
T t H C H
CT T t
C AH
T t
d the system moves in a flat tumble.
x
y
z
This does not happen when C >A

Propulsion Function Comments/ Typical RequirementsLaunch and injection into LEO Really in the domain of "Launch Systems" -
which we discuss separately below
DV for raising the orbit from LEO to a higher orbit 60 to 1500 m/s, Use kick motor
Acceleration to escape velocity from LEO parking orbit
3600 to 4000 m/s for injection into an interplanetary trajectory
Interplanetary trajectory - From Earth escape to in-mission parking orbit.
Depends heavily on the trajectory design - Have a wide choice among min energy maneuvers, swing-by maneuvers, etc.
In-Mission OperationsOrbit correction V
Stationkeeping V
"Formation Flying" V's
15 to 75 m/s per year, for Earth orbits
Up to 45 to 55 m/s per year, Earth orbits
Could be relevant to stand-off mode of operation.
Attitude control
Acquisition of Sun, Earth, Star - for navigational and target acquisition purposes
In-mission pointing control, 3-axis stabilization
< 5000 N-s total impulse, 1K to 10K pulses, 0.01 to 5.0 s pulse width
100K to 200K pulses, min impulse bit of 0.01N-s, 0.01 to 0.25s pulse width.

Propulsion Systems - Key Parameters
F
CombustionChamber
Ve
Oxidizer Fuel
dm/dt
Nozzle
F Thrust Ve (dm/dt)
Ve =exhaust velocity
dm/dt = propellant and oxidizer mass
flow rate
Isp Specific Impulse
= F / (g dm/dt)
-- depends on propulsion type (liquid, solid, chemical, electric, etc.) , energetics of chemical reactions, etc.

Key Propulsion Parameters Related to Important Trajectory Parameters
Suppose we have a thruster burn event with constant thrust (maybe to inject the spacecraft into a higher orbit, etc.).
Define: m0 Total mass of vehicle before burn eventmp Mass of propellant (& oxidizer) used in burn event

ΔV = Total change in vehicle speed = g Isp ln (m0/( m0 - mp))Δt = Time elapsed during burn event = g Isp mp/ F
•Trajectory Requirements Needed V and t
•Use above relations to estimate total mass of propellant
•Select propulsion system (F & Isp) and design trajectory to minimize total propulsion system
mass
Trajectory Parameters/ Propulsion System Relations:

Determining Propulsion System Requirements- For Transport of S/C to its Mission Station
Lay out the entire trajectory and itemize the V maneuvers.
Start from the last V maneuver and use the V/ mp equation to determine mp
(where here, m0 mp = the final S/C mass), for several values of Isp
From considerations of the t desired, or other practical constraints, determine any thrust level requirements. Now narrow the selection of propulsion systems to those consistent with required thrust levels.

Now, carry out the above process for all the V maneuvers, working back along the trajectory. Get a range of values for mp and F.
Finally, obtain the total propulsion system masses corresponding to different propulsion system options.
Select option with smallest cost and/or launch weight.

Launch SystemsKey Parameters are:
Mass of payload that can be injected into LEO or GTO or GEO
Fairing diameter and length

Launch SystemUpper Stage (if
any)LEO(kg)
GTO(kg)
GEO(kg)
Fairing Envelopes
Diam(m) Length (m)
ATLAS II Cent-2 6395 2680 570 4.2
SHUTTLE IUSTOSPAM-D
24,400------
--590059001300
--2360----
4.6 18.3
TITAN III NUSPAM-D2TRANTOS
14,400------
--185043105000
--13601360--
3.6 12.415.516.0
TITAN IV NUSCentIUS
17,700----
--57606350
--45402380
4.5 17.020.023.0,26.0
ARIANE 40(France)42P42L44P44LP44L
H-10H-10H-10H-10H-10H-10EPS
49006100740069008300960018,000 at 550
km
1900260032003000370042006800
--------------
3.6 8.6 to 12.4
H-2 (Japan) -- 10,500 4000 2200 3.7 10.0
LONG MARCH (China)CZ2E
Star 63F 9265 3370 1500 3.8 7.5
PROTON(Russia)ENERGIAZENIT 2
D1D1eEUS, RCSBlock D
20,00090,00013,740
--5500--4300
--220018,0004100
3.34.15.53.3
4.2-7.519-375.8-9
Data for Systems with Fairing Diameters >3.0 m

and watch out for those irate Romulans!