Embed Size (px)
Citation preview

YANG-BAXTER AND REFLECTION MAPS FROMOPTICAL SOLITONS INTERACTIONS
Vincent Caudrelier
Department of Mathematics
City University London
LAPTh, 18 September 2014

References: based on joint work with Cheng Zhang
Discovery and first solutions of the set-theoretical reflection equation:
• Vector Nonlinear Schrodinger Equation on the half-line, J. Phys. A45,(2012), 105201.
• Yang-Baxter and reflection maps from vector solitons with a boundary,Nonlinearity 27 (2014) 1081.
Study and applications in the context of fully discrete integrable systems anddiscrete di↵erential geometry with Nicolas Crampe (not covered today):
• Set-theoretical reflection equation: Classification of reflection maps, J.Phys. A46, (2013), 095203.
• Integrable boundary for quad-graph systems: Three-dimensional boundaryconsistency, SIGMA 10 (2014).

Plan
1. Vector nonlinear Schrodinger (NLS) equation on the half-line
•Model and soliton solutions via nonlinear mirror image method
• Polarization e↵ect at the boundary
2. Further study of vector soliton solutions
• Interactions of vector solitons: factorization and set-theoretical Yang-Baxter equation
• Case with a boundary: factorization and set-theoretical reflection equation•Moral of the story: Yang-Baxter and reflection equation not just for quan-tum matrices
3. Conclusions and outlook

1.1 Vector NLS on the half-line: model and soliton solutions
•Model of wave propagation in nonlinear Kerr optical medium:
(i@
t
+ @
2
x
)R + 2R
†RR = 0 ,
for a vector field R = (R
1
, . . . , R
n
)
T of 1 + 1 variables (x, t).
• Case n = 2 is the historical Manakov model representing propagatingpolarized light.
• On the full line x 2 R, the model is integrable and amenable to theso-called Inverse Scattering Method (ISM) = nonlinear Fouriertransform [Manakov ’74]
ISM:R(x, 0)
F�! {S(k, 0), kj
, C
j
(0)}#
R(x, t)
F�1 � {S(k, t), kj
, C
j
(t)}

• F and F�1 obtained by spectral analysis of an auxiliary problem involvinga so-called Lax pair U, V :
(@
x
(x, t, k) = U(x, t, k) (x, t, k) ,
@
t
(x, t, k) = V (x, t, k) (x, t, k) .
• Compatibility of this linear auxiliary problem yields the zero-curvature con-dition which is equivalent to the nonlinear PDE of interest
xt
=
xt
, 8k , U
t
� V
x
+ [U, V ] = 0, (i@
t
+ @
2
x
)R = �2R†RR .
where
U = (�ik⌃3
+Q) , V = (�2ik2⌃3
+G) ,
with
⌃
3
=
✓1In
0
0 �1
◆, Q =
✓0 R
�R†0
◆and G = 2kQ� iQ
x
⌃
3
� iQ
2
⌃
3
,

• Beauty of the method is that, as R evolves in time nonlinearly, S(k) andC
j
evolve linearly:
@
t
S(k, t) = 2ik
2
[�
3
, S(k, t)] ,
d
dt
C
j
(t) = �4ik2j
C
j
(t) .
• Inverse part allows to obtainedR(x, t) from evolved scattering data S(k, t)and C
j
(t). Technical!

Pure soliton case
• S(k, t) plays no role and R(x, t) completely controlled by k
j
2 C withcorresponding norming constants C
j
2 Cn, j = 1, . . . , N . N is thenumber of solitons.
• Explicitely,
R(x, t) = �2i�1 1 . . . 1
�µ
�1(x, t)
0
B@C
1
e
�2ik⇤1
x�4ik⇤21
t
...
C
N
e
�2ik⇤N
x�4ik⇤2N
t
1
CA ,
where
µ
m`
(x, t) = �
m`
1In
+
NX
j=1
e
2i(k
j
�k⇤m
)x+4i(k
2
j
�k⇤2m
)t
(k
⇤`
� k
j
)(k
j
� k
⇤m
)
C
m
C
†j
.

Why is it called an N -soliton solution?
• for N = 1, the solution is characterized by k = v + iA and polarizationp = C/||C||
R(x, t) = pA
e
if (x,t)
coshA(x� vt� x
0
)
• For N � 2, the large time asymptotic behaviour of the solution is
R(x, t) =
NX
j=1
p±j
A
j
e
if
j
(x,t)
coshA
j
(x� v
j
t� x
±j
)
, t! ±1 .
An N -soliton solution splits into a train of N one-soliton solutions.

Case with a boundary at x = 0
• Restrict to half-line x > 0, impose integrable boundary conditions atx = 0,
• Construct solutions using nonlinear version of mirror image technique.
• Both finding integrable BC and implementing nonlinear mirror image tech-nique achieved by using Backlund transformations technique combinedwith folding.
• Backlund transformations are transformations between solutions of PDEs.
Example: The Cauchy-Riemann equations
u
x
= v
y
, u
y
= �vx
are an example of (auto) BT for the Laplace equation u
xx
+ u
yy
= 0.

Procedure for scalar NLS (Habibullin ’89; Bibikov, Tarasov ’89; Biondini,Hwang ’09):
• Take two copies of the Lax pair presentation and connect them by a 2⇥2
matrix L(x, t, k)
(IS1)
(@
x
= U ,
@
t
= V ,
, (IS2)
(@
x
e =
eU
e ,
@
t
e =
eV
e ,
with e = L .
• The Backlund matrix L must satisfy
L
x
=
eUL� LU , L
t
=
eV L� LV . (1)
• Put (IS1) on (0,1), (IS2) on (�1, 0).
• Impose (1) at x = 0 and eQ(x, t) = Q(�x, t) (folding). Then, (1) atx = 0 gives allowed integrable boundary conditions (BC) on Q.
• Implement mirror image technique: apply ISM to appropriate extensionof Q(x, t) for all x 2 R and extract solution on x > 0.

Application to vector NLS [Caudrelier, Zhang ’12-’13]
• The simplest time-independent integrable boundary conditions for vectorNLS are
(@
x
� ↵)R(x, t)
x=0
= 0 , ↵ 2 R , (Robin BC) ,(R
i
(0, t) = 0 , i = 1 . . . , k ,
@
x
R
i
(0, t) = 0 , i = k + 1, . . . , n
, (mixed Neumann-Dirichlet BC) .
• The reconstruction formulas of the full line for R(x, t) are still valid whenrestricted to x > 0 provided symmetry constraints hold on scatteringdata.

For pure solitons case, the mirror image constraints are
• N = 2J and, without loss of generality, kj+J
= �k⇤j
, j = 1, . . . , J
• The corresponding norming constants Cj+J
= C
0j
and C
j
satisfy
C
0j
C
†j
= �B(�kj
)M(k
j
) , j = 1, . . . , J .
where M(k
j
) is a matrix depending on all the norming constants and
B(k) =
k � i↵
k + i↵
1In
or B(k) =
0
@�
1
. . .�
n
1
A, �
j
= ±1 .
• Pictorially
2J , . . . , J + 2 , J + 1
��� 1 , 2 , . . . J , t! �1 ,
J , . . . , 2 , 1
��� J + 1 , J + 2 , . . . 2J , t!1 ,

1.2 E↵ect of the boundary
Important observation:
• (i@t
+ @
2
x
)R + 2R
†RR = 0 invariant under global U(n) transformation
R! U R.
• But mixed BC are not!(R
i
(0, t) = 0 , i = 1 . . . , k ,
@
x
R
i
(0, t) = 0 , i = k + 1, . . . , n
) the boundary has a polarization e↵ect: transmission between modesas solitons reflect.
• Easily seen on one-soliton solution from our explicit results.

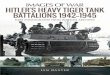
• Choose n = 2 (two-dimensional polarizations) and boundary matrix
B
0
=
✓1 0
0 �1
◆,
• First mode R
1
(left) satisfies Neumann BC @
x
R
1
(0, t) = 0 and secondmode R
2
(right) satisfies Dirichlet BC R
2
(0, t) = 0.
0
5
10
x-2
02
t
»R1Hx,tL»
0
510
x-20
2
t
»R2Hx,tL»

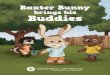
• Now choose transformation
U =
✓cos ✓ sin ✓
� sin ✓ cos ✓
◆,
with ✓ 2 R and consider the boundary matrix B = U B
0
U
�1. ✓ mea-sures the ”deviation” from the natural boundary basis corresponding tomixed Neumann-Dirichlet BC.
• Now, clear transmission of ”mass” from mode 1 to mode 2.
0
5
10
x-2
02
t
»R1Hx,tL»
0
5
10
x-2
02
t
»R2Hx,tL»

2.1 Further study of vector soliton solutions
• Back to scalar solitons on the line: behave like particles through collisionsalthough they are classical, extended, nonlinear objects! (Video)
• Through collision shape, velocity and amplitude and number of solitonsare retained. Only e↵ect is phase and position shifts
R(x, t) =
NX
j=1
A
j
e
if
j
(x,t)
coshA
j
(x� v
j
t� x
±j
)
, t! ±1 .
• Formulas for shifts in f
j
and for x+j
�x
�j
show phenomenon of factoriza-tion of collisions into two-body collisions.
• Consistency in scalar case ensured by additivity (hence commutativity) ofthe two-body shifts.

The general problem of factorization of interactions
•When the objects are quantum particles, this gives rise to the Yang-Baxterequation for the quantum scattering matrix S
S
12
(k
1
, k
2
)S
13
(k
1
, k
3
)S
23
(k
2
, k
3
) = S
23
(k
2
, k
3
)S
13
(k
1
, k
3
)S
12
(k
1
, k
2
)
• But what is the analog of this when the objects are solitons? Is factoriza-tion still present for vector solitons?

• Answer obtained by looking again at large time asymptotics of solutions
R(x, t) =
NX
j=1
p±j
A
j
e
if
j
(x,t)
coshA
j
(x� v
j
t� x
±j
)
, t! ±1 ,
and keeping track of the relations between outgoing and incoming polar-izations.
• Results: Factorisation property still holds! [Tsuchida ’04; Ablowitz, Prinari, Trubatch
’04; Caudrelier, Zhang ’13]

• The map {p�j
}N1
7! {p+j
}N1
factorises into a succession of two-bodycollision maps of the form
R(k
1
, k
2
) : (p�1
,p�2
) 7! (p+1
,p+2
) ,
p+1
=
I
n
+
✓k
⇤1
� k
2
k
⇤1
� k
⇤2
� 1
◆p�2
(p�2
)
†
(p�2
)
†p�2
!p�1
,
p+2
=
I
n
+
✓k
2
� k
⇤1
k
2
� k
1
� 1
◆p�1
(p�1
)
†
(p�1
)
†p�1
!p�2
.
• Consistency ensured by the fact that R(k
1
, k
2
) satisfies the so-called set-theoretical Yang-Baxter equation on the set (CPn�1)3
R12
(k
1
, k
2
)�R13
(k
1
, k
3
)�R23
(k
2
, k
3
) = R23
(k
2
, k
3
)�R13
(k
1
, k
3
)�R12
(k
1
, k
2
)

What’s going on?
• Important to realize that behind factorization lies the permutation groupwith generators s
i
, i = 1, . . . , N � 1 and relations
s
i
s
i+1
s
i
= s
i+1
s
i
s
i+1
, s
2
i
= id .
• Now roughly speaking, quantum YBE deals with linear representations ofthe permutation groups i.e. (quantum) matrices.
• The quantum R matrix is a parameter-dependent solution of the equation
R
12
(u, v) �R13
(u, w) �R23
(v, w) = R
23
(v, w) �R13
(u, w) �R12
(u, v)
understood as an identity in End(V
⌦3) for some vector space V . Oper-
ation � simply matrix multiplication in that case.
• The indices show in which copy of V inside V ⌦ V ⇥ V the matrix R
acts nontrivially.

• In 1990, Drinfeld emphasized the importance the set-theoretical YBE :roughly, it amounts to the most general study of the representations of
R
12
(u, v) �R13
(u, w) �R23
(v, w) = R
23
(v, w) �R13
(u, w) �R12
(u, v)
• R12
any (nonlinear) map on X ⇥X to itself, X any set, � compositionof maps.
• As we have just seen, vector soliton collisions provide examples of suchnonlinear representation of the permutation group.
• Beauty in integrable systems: quantum and classical systems share thesame fundamental structures! One ”simply” has to allow for more generalrepresentations of these structures.

2.2 Case with a boundary [Caudrelier, Zhang ’13-’14]
Questions:
• Does factorization survive the presence of a boundary?
• If so, how is the consistency ensured in this case?
Answers:
• Yes, for the integrable boundary conditions that we found above viaBacklund transformation technique.
• Asymptotic analysis shows that a new object appears to describe soliton-boundary collisions. This new object has to satisfy the boundary analogof the set-theoretical YBE: the set-theoretical reflection equation.

• Pictorially, e↵ect of the boundary on polarizations extracted from R mapmodulo mirror image relations
p�j
Rj+J,j
(k
j+J
, k
j
)
ep+j+J
p�j+J
ep+j
!
p�j
Bj
(k
j
)
p+j
•We get the boundary map B : (p�, k) 7! (p+,�k⇤) where
p+ =
I
n
+
k � k
⇤
k + k
⇤p�p�†
p�†p�
!B(k)p� .

• Consistency of factorization with a boundary ensured by the reflectionequation
•We found that B satisfies the set-theoretical reflection equation
R12
(k
1
, k
2
) � B1
(k
1
) �R21
(�k⇤1
, k
2
) � B2
(k
2
)
= B2
(k
2
) �R12
(k
1
,�k⇤2
) � B1
(k
1
) �R21
(�k⇤1
,�k⇤2
)

Comments
• The observation on the relation between permutation group and the Yang-Baxter equation goes over to the case with reflection .
• The appropriate generalization of the permutation group is the finite Cox-eter group of typeBC
N
which is the permutation group with an additionalgenerator b satisfying b
2
= id and
bs
1
bs
1
= s
1
bs
1
b .
• The quantum reflection equation, introduced in 1998 by Sklyanin dealswith linear representations of this group.
•We discovered the set-theoretical reflection equation which is the non-linear, abstract generalization of this problem: given a map R on a setX ⇥X , find a map B on X such that
R12
� B1
�R21
� B2
= B2
�R12
� B1
�R21

2.3 Moral of the story
• Quantum and classical integrable systems share the most fundamentalstructures of integrability: one ”simply” has to go beyond the realm oflinear representations to see it.
• Both YBE and RE have set-theoretical (nonlinear) versions: they are notjust for quantum (linear) objects. Solutions arise from study of classicalintegrable PDEs.
• The Yang-Baxter equation: unifying principle behind quantum integrablesystems/quantum groups and classical integrable systems/Poisson-Lie groups.
• In fact, factorization of processes seems to be the deepest unifying prin-ciple in integrability.
•Warning: not to be confused with the classical YBE for the classical r-matrix!

3 Conclusions and perspectives
Some natural questions: a lot left to do (exciting?!)
•More examples from physical soliton systems? Applications for solitoncontrol?
• Classification problem: given a set X and a Yang-Baxter map, find allpossible reflection maps. First results available [Caudrelier, Crampe, Zhang ’13]
• There exists a deep mathematical connection between quantum groupsand Poisson-Lie groups:
– Usually seen through the classical r-matrix approach and the theory ofLie bialgebras (common ”limit” of the two theories).
– But set-theoretical YBE seems to give a direct link...
–What is the story with reflection? Only known on the quantum side sofar.

THANK YOU!