Embed Size (px)
Citation preview
T.C.
SÜLEYMAN DEMİREL ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
YAPAY SİNİR AĞLARI, BULANIK MANTIK VE SİNİRSEL
BULANIK DENETLEYİCİLER İLE ASENKRON MOTORLARIN
HIZ DENETİMİ İÇİN SİMÜLATÖR TASARIMI
SERDAR PAÇACI
Danışman: Yrd. Doç. Dr. Okan BİNGÖL
YÜKSEK LİSANS TEZİ
ELEKTRONİK BİLGİSAYAR EĞİTİMİ ANABİLİM DALI
ISPARTA – 2011
i
ĠÇĠNDEKĠLER
Sayfa
İÇİNDEKİLER ............................................................................................................. i
ÖZET........................................................................................................................... iii
ABSTRACT ................................................................................................................ iv
TEŞEKKÜR ................................................................................................................. v
ŞEKİLLER DİZİNİ ..................................................................................................... vi
ÇİZELGELER DİZİNİ ............................................................................................... ix
SİMGELER VE KISALTMALAR DİZİNİ ................................................................ x
1. GİRİŞ ....................................................................................................................... 1
2. KAYNAK ÖZETLERİ ............................................................................................ 6
2.1. Kuramsal Temeller .............................................................................................. 10
2.1.1. Asenkron motorlar ........................................................................................... 10
2.1.1.1. Üç fazlı asenkron motorun matematiksel modeli.......................................... 10
2.1.1.2. Üç fazdan iki faza dönüşüm .......................................................................... 14
2.1.1.3. Asenkron motorun modelinde kullanılan referans düzlemleri ...................... 16
2.1.1.4. Dolaylı vektör kontrol yöntemi ..................................................................... 19
2.1.2. Üç seviyeli evirici ve modülasyon teknikleri ................................................... 22
2.1.2.1. İki seviyeli gerilim beslemeli evirici ............................................................. 23
2.1.2.2. Üç seviyeli gerilim beslemeli eviriciler ........................................................ 24
2.1.2.3. Çok seviyeli eviricilerde DGM teknikleri ..................................................... 27
2.1.2.4. Üç seviyeli diyot tutmalı evirici ve uzay vektör DGM ................................. 28
2.1.3. Bulanık mantık ................................................................................................. 36
2.1.3.1. Bulanık küme kuramı ve bulanık mantık ...................................................... 36
2.1.3.2. Üyelik fonksiyonları...................................................................................... 38
2.1.3.3. Bulanık mantık denetleyici ........................................................................... 41
2.1.4. Yapay sinir ağları ............................................................................................. 47
2.1.4.1. Yapay sinir ağının yapısı ............................................................................... 48
2.1.4.2. Yapay sinir ağlarının sınıflandırılması .......................................................... 51
2.1.4.3. Yapay sinir ağlarında öğrenme ..................................................................... 51
ii
2.1.4.4. Danışmanlı geri yayılımlı bir yapay sinir ağı modeli ................................... 53
2.1.4.5. Girdilerin ve çıktıların ölçeklendirilmesi ...................................................... 60
2.1.4.6. Öğrenme katsayısının ağ üzerindeki etkisi ................................................... 60
2.1.4.7. Momentum katsayısının ağ üzerindeki etkisi ................................................ 61
2.1.4.8. Gizli katmanın ağ üzerindeki etkisi .............................................................. 61
2.1.4.9. Hata farkı değerinin ağ üzerindeki etkisi ...................................................... 61
2.1.5. Sinirsel bulanık mantık .................................................................................... 61
2.1.5.1. ANFIS ........................................................................................................... 62
2.1.5.2. ANFIS geri yayılımlı öğrenme algoritması................................................... 66
3. MATERYAL ve YÖNTEM ................................................................................... 69
3.1. Asenkron Motorun Hızının PI Denetleyici İle Kontrolü .................................... 70
3.2. Asenkron Motorun Hızının PID Denetleyici İle Kontrolü .................................. 71
3.3. Asenkron Motorun Hızının Bulanık Mantık Denetleyicisi İle Kontrolü ............ 72
3.4. Asenkron Motorun Hızının Yapay Sinir Ağı Denetleyicisi İle Kontrolü ........... 73
3.5. Asenkron Motorun Hızının ANFIS Denetleyici İle Kontrolü ............................ 75
4. ARAŞTIRMA BULGULARI ................................................................................ 76
4.1. Asenkron Motor Parametreleri ve Simülasyon Ayarları Menüsü ....................... 79
4.2. Simülasyon Grafikleri Menüsü ........................................................................... 80
4.3. Blok Diyagram Menüsü ...................................................................................... 82
4.4. Bulanık Mantık Denetleyicisi Menüsü................................................................ 84
4.5. Yapay Sinir Ağı Menüsü ..................................................................................... 86
4.6. ANFIS Menüsü ................................................................................................... 92
4.7. Seçenekler Menüsü ............................................................................................. 92
5. TARTIŞMA ve SONUÇ ........................................................................................ 97
6. KAYNAKLAR ...................................................................................................... 99
ÖZGEÇMİŞ ............................................................................................................. 105
iii
ÖZET
Yüksek Lisans Tezi
YAPAY SĠNĠR AĞLARI, BULANIK MANTIK VE SĠNĠRSEL BULANIK
DENETLEYĠCĠLER ĠLE ASENKRON MOTORLARIN HIZ DENETĠMĠ
ĠÇĠN SĠMÜLATÖR TASARIMI
Serdar PAÇACI
Süleyman Demirel Üniversitesi
Fen Bilimleri Enstitüsü
Elektronik Bilgisayar Eğitimi Anabilim Dalı
DanıĢman: Yrd. Doç. Dr. Okan BĠNGÖL
Günümüzde asenkron motorlar (ASM) endüstriyel uygulamalarda geniş bir kullanım
alanına sahiptirler. Bu durum ASM‟ lerin farklı hızlarda çalıştırılması ihtiyacını
doğurmuştur. ASM‟ nin hızı farklı denetleyici türleri ile kontrol edilebilmektedir.
Matematiksel modeli iyi tanımlanamamış, doğrusal ve kesin olmayan sistemlerin
kontrolünde PI ve PID gibi klasik denetleyicilerin performansı düşüktür. Bulanık
mantık (BM), yapay sinir ağı (YSA) veya sinirsel bulanık denetleyiciler ile bu tip
sistemlerin kontrolü daha başarılıdır.
Bu çalışmada PI, PID, BM, YSA ve sinirsel bulanık denetleyiciler ile evirici temelli
asenkron motorun hız kontrolü için, simülatör programı hazırlanmıştır. Hazırlanan
simülatör Visual Studio 2010 IDE‟ sinde WPF alt yapısı kullanılarak, C#
programlama dili ile yazılmıştır. Simülatör, esnek bir yapıya ve grafiksel bir ara yüze
sahiptir. Hazırlanan simülatör ile ASM‟ nin, eviricinin ve denetleyicilerin
parametreleri değiştirilerek sistemin farklı çalışma durumlarındaki tepkisi grafikler
yardımıyla izlenebilmektedir.
Anahtar Kelimeler: Asenkron motor, üç seviyeli evirici, uzay vektör DGM, bulanık
mantık, yapay sinir ağı, sinirsel bulanık mantık, ANFIS
2011, 105 sayfa

iv
ABSTRACT
M.Sc. Thesis
A SIMULATOR DESIGN FOR SPEED CONTROL OF INDUCTION
MOTORS USING ARTIFICAL NEURAL NETWORKS, FUZZY LOGIC AND
NEURO FUZZY CONTROLLER
Serdar PAÇACI
Süleyman Demirel University
Graduate School of Applied and Natural Sciences
Department of Electronic and Computer Education
Supervisor: Asst. Prof. Dr. Okan BĠNGÖL
Induction motors have currently a wide usage in industrial applications. This
situation required induction motors to running at different speeds. Speed control of
induction motors can be controlled with different types of controller. Performances
of conventional control methods such as PI and PID in controlling non-linear and
non-precise systems whose mathematical model is not well defined are poorer.
Control of such systems by using fuzzy logic, atrifical neural network or neuro fuzzy
controller is more successful.
In this study, a simulator software for speed control of inverter based induction
motors with PI, PID, fuzzy logic, artificial neural network and neuro fuzzy
controllers is developed. This simulator was written using the C# programming
language based on WPF in Visual Studio 2010 environment. The simulator has a
flexible structure and graphical user interface. It is possible to monitor induction
motors reactions by graphs under different operation conditions by changing the
motor, inverter and controller parameters of the driver easily.
Key Words: Induction motor, three level inverter, space vector PWM, fuzzy logic,
neural network, adaptive neuro fuzzy, ANFIS
2011, 105 pages
v
TEġEKKÜR
Bu çalışmada beni yönlendiren, karşılaştığım zorlukları bilgi ve tecrübesi ile
aşmamda yardımcı olan değerli Danışman Hocam Yrd. Doç. Dr. Okan BİNGÖL‟ e
teşekkürlerimi sunarım.
Araştırmanın yürütülmesinde ve tez aşamasında manevi desteklerini esirgemeyen
değerli hocam Yrd. Doç. Dr. Ecir Uğur KÜÇÜKSİLLE ve tüm çalışma
arkadaşlarıma teşekkür ederim.
2465-YL-10 No‟lu Proje ile tezimi maddi olarak destekleyen Süleyman Demirel
Üniversitesi Bilimsel Araştırma Projeleri Yönetim Birimi Başkanlığı‟na teşekkür
ederim.
Tezimin her aşamasında beni yalnız bırakmayan aileme sonsuz sevgi ve saygılarımı
sunarım.
Serdar PAÇACI
ISPARTA, 2011
vi
ġEKĠLLER DĠZĠNĠ
Şekil 2.1. Üç-fazlı asenkron motorun manyetik eksen düzlemi ............................. 11
Şekil 2.2. abc - ekseninden dq - eksenine dönüşüm ................................................ 15
Şekil 2.3. Asenkron motor değişkenlerinin aktarıldığı d - q referans düzlemleri ... 16
Şekil 2.4. Dolaylı vektör kontrolüne ait düzlem dönüşümleri ................................ 20
Şekil 2.5. İki seviyeli gerilim beslemeli evirici ....................................................... 23
Şekil 2.6. Üç seviyeli diyot tutmalı evirici ............................................................. 24
Şekil 2.7. Üç seviyeli diyot tutmalı eviricinin a) çıkış faz b) çıkış hat gerilimleri . 25
Şekil 2.8. Üç seviyeli kondansatör tutmalı evirici ................................................... 26
Şekil 2.9. Bir fazlı seri bağlı tam köprü çok seviyeli evirici ................................... 27
Şekil 2.10. Üç seviyeli diyot tutmalı eviricinin anahtarlama durumları.................... 28
Şekil 2.11. Üç seviyeli eviricinin çıkış gerilimlerinin anahtarlama durumları ve uzay
vektörü…... .............................................................................................. 28
Şekil 2.12. Üç seviyeli eviricinin gerilim uzay vektörleri ......................................... 28
Şekil 2.13. A sektörüne ait uzay gerilim vektörleri .................................................. 28
Şekil 2.14. A sektörüne ait dört bölge için üç fazın DGM dalga şekilleri ................ 33
Şekil 2.15. α - β düzlemi ile g-h düzlemi arasındaki bağlantı ................................... 34
Şekil 2.16. Normalize edilmiş referans gerilim vektörünün maksimum uzunluğu .. 35
Şekil 2.17. Normalize edilmiş referans gerilim vektörünün A sektörü 1 bölgesi ..... 34
Şekil 2.18. Klasik küme ve bulanık mantık kümesi .................................................. 37
Şekil 2.19. Üçgen üyelik fonksiyonu ......................................................................... 38
Şekil 2.20. Trapezoidal üyelik fonksiyonu ................................................................ 39
Şekil 2.21. Sigmoid üyelik fonksiyonu ...................................................................... 38
Şekil 2.22. Gaussian üyelik fonksiyonu ..................................................................... 40
Şekil 2.23. Bulanık mantık denetleyicisinin yapısı .................................................... 41
Şekil 2.24. Max-dot çıkarım tekniği .......................................................................... 43
Şekil 2.25. Min-max çıkarım tekniği ......................................................................... 43
Şekil 2.26. Tsukamoto çıkarım tekniği ...................................................................... 44
Şekil 2.27. Takagi-sugeno çıkarım tekniği ................................................................ 45
Şekil 2.28. Maksimum üyelik tekniği ........................................................................ 46
vii
Şekil 2.29. Ağırlık merkezi tekniği ........................................................................... 46
Şekil 2.30. Ağırlık ortalaması tekniği........................................................................ 47
Şekil 2.31. Maksimumların ortalaması tekniği.......................................................... 46
Şekil 2.32. Yapay sinir hücresinin modeli................................................................. 49
Şekil 2.33. Doğrusal aktivasyon fonksiyonu ............................................................. 50
Şekil 2.34. Eğrisel aktivasyon fonksiyonu ................................................................ 50
Şekil 2.35. Çift yönlü eğrisel aktivasyon fonksiyonu................................................ 51
Şekil 2.36. Danışmanlı öğrenme ............................................................................... 51
Şekil 2.37. Danışmansız öğrenme ............................................................................. 53
Şekil 2.38. Bir çıkışlı, iki katmanlı geri yayılmalı yapay sinir ağı ............................ 54
Şekil 2.39. Geri yayılımlı öğrenme algoritması ........................................................ 59
Şekil 2.40. ANFIS denetleyicisinin mimarisi ............................................................ 63
Şekil 3.1. Üç seviyeli evirici tarafından beslenen asenkron motorun denetim blok
diyagramı... .............................................................................................. 69
Şekil 3.2. Asenkron motorun PI denetleyici ile hız denetimi .................................. 70
Şekil 3.3. Asenkron motorun PID denetleyici ile hız denetimi ............................... 71
Şekil 3.4. Asenkron motorun bulanık mantık denetleyici ile hız denetimi ............. 72
Şekil 3.5. Bulanık mantık denetleyicisi denetim algoritması .................................. 74
Şekil 3.6. Asenkron motorun yapay sinir ağı denetleyicisi ile hız denetimi ........... 74
Şekil 3.7. Yapay sinir ağı denetleyicisi denetim algoritması .................................. 75
Şekil 3.8. Asenkron motorun ANFIS denetleyicisi ile hız denetimi ....................... 76
Şekil 4.1. Simülatör programının ana penceresi ...................................................... 77
Şekil 4.2. PI denetleyici için simülasyon ekranı...................................................... 79
Şekil 4.3. Asenkron motor parametreleri ve simülasyon ayarları menüsü .............. 80
Şekil 4.4. PI denetleyici için simülasyon ekranı...................................................... 82
Şekil 4.5. Bulanık mantık denetleyici için simülasyon ekranı ................................ 83
Şekil 4.6. Blok diyagram menüsü............................................................................ 84
Şekil 4.7. Bulanık mantık denetleyicisi menüsü ..................................................... 85
Şekil 4.8. Bulanık mantık denetleyicisi menüsü ..................................................... 86
Şekil 4.9. Yapay sinir ağı veri giriş menüsü ............................................................ 88
Şekil 4.10. Sql server‟dan veri ekleme penceresi ...................................................... 88
viii
Şekil 4.11. Yapay sinir ağı modelleme menüsü ........................................................ 90
Şekil 4.12. Yapay sinir ağı öğrenme menüsü ............................................................ 91
Şekil 4.13. Yapay sinir ağı öğrenme parametreleri ................................................... 91
Şekil 4.14. Nöron ve ağırlık bilgilerinin gösterimi ................................................... 92
Şekil 4.15. Yapay sinir ağı test menüsü .................................................................... 92
Şekil 4.16. ANFIS modelleme menüsü ..................................................................... 94
Şekil 4.17. ANFIS modelleme menüsü ..................................................................... 95
Şekil 4.18. Seçenekler menüsü .................................................................................. 96
Şekil 4.19. Simülasyon verileri menüsü .................................................................... 96
Şekil 4.20. Simülasyon eğitim verileri menüsü ......................................................... 97
Şekil 4.21. Fourier analizi menüsü ............................................................................ 97
Şekil 5.1. Denetleyiciler için ASM hız kontrol grafiği ........................................... 99
ix
ÇĠZELGELER DĠZĠNĠ
Çizlege 2.1. Üç seviyeli eviricinin anahtarlama durumları ........................................ 29
Çizelge 2.2. Üç seviyeli eviricinin gerilim vektörlerinin gruplandırılması ............... 29
Çizelge 2.3. Farklı bölgelerdeki gerilim vektörlerinin zaman süreleri ...................... 32
Çizelge 2.4. g-h düzlemi kullanılarak sektör belirleme ............................................. 35
Çizelge 2.5. A sektörü için bölge bulunması durumları............................................. 36
Çizelge 5.1. Simülasyon referans hız değerleri .......................................................... 99
x
SĠMGELER VE KISALTMALAR DĠZĠNĠ
AA Alternatif akım
ANFIS Adaptive neuro fuzzy interface system
ASM Asenkron motor
BDCM Brushless direct current motor
BM Bulanık mantık
DA Doğru akım
DGM Darbe genişlik modülasyonu
PMDC Permanent magnet direct current
UVDGM Uzay vektör darbe genişlik modülasyonu
YSA Yapay sinir ağı
1
1. GĠRĠġ
Günümüzde elektrik motorları ev aletleri, otomotiv, taşıma araçları ve havacılık gibi
endüstriyel alanlarda kullanılmaktadır. Doğru akım (DA) motorlar yaygın olarak
kullanılan motor türlerinden biridir. DA motorların denetimleri kolay bir şekilde
gerçekleştiğinden yaygın olarak kullanılmışlardır. Güç elektroniği ve yarı iletken
teknolojisindeki gelişmelere paralel olarak, alternatif akım (AA) ile çalışan
motorların denetimi kolaylaşmıştır. Bu sebeple ASM‟ ler endüstriyel uygulamalarda
daha yaygın olarak kullanılmaya başlamıştır (Sen, 1990).
ASM‟ ler genel olarak stator ve rotor olmak üzere iki kısımdan oluşmaktadır. Stator,
ASM‟ nin duran kısmıdır. Rotor ise dönen kısmıdır. ASM‟ ler diğer elektrik
motorlarına göre daha ucuzlardır ve bakıma daha az ihtiyaç duyarlar. Tehlikeli ve
kirli ortamlarda çalışabilirler. Bu gibi sebeplerden dolayı ASM‟ lerin kullanılma
oranı artmıştır. Artan kullanıma bağlı olarak ASM‟ lerin, farklı işlerde farklı hızlarda
çalıştırılma ihtiyacı doğmuştur (Bose, 1997; 2002).
ASM‟ ler direkt olarak şebeke geriliminden beslendiğinde kutup sayıları ve şebeke
frekansına göre belirli bir sabit hızda dönerler. ASM‟ lerin değişik hızlarda
çalıştırılabilmesi için değişken genlikli gerilim ve frekans üretebilen kaynaklardan
beslenmeleri gerekmektedir. Eviriciler tarafından beslendiklerinde, ASM‟ lerin hızını
değiştirmek mümkün hale gelmektedir (Bose, 1997).
Şebekeden elde edilen AA, doğrultucular ile DA‟ ya dönüştürülür. Daha sonra tekrar
eviriciler ile AA‟ ya dönüştürülür. DA kaynağından beslenen sistemlerde gerilimin
genliği, yaygın olarak darbe genişlik modülasyonu (DGM) ile ayarlanır. DA
kaynağın çıkış akımı üzerinde, sinüsoidal giriş akımı üzerinden beslenmesi ile düşük
seviyede harmonikler oluşur. Oluşan harmonikler ise çıkış gerilimindeki bozulmaları
oluşturur. Bu durum sistemin denetimine bozucu etki yapmaktadır (Drury ve Grant,
1994; Saygın, 2004).
2
Çıkış gerilimindeki harmonikler genel olarak iki durumda en aza indirgenebilir.
Birinci durumda yüksek anahtarlama frekansına sahip yarı iletken anahtarlara farklı
DGM teknikleri uygulanır. İkinci durumda ise eviricinin çıkış dalga şeklinin seviye
sayısı arttırılır.
Klasik iki seviyeli eviricilerde giriş besleme gerilimi ise, çıkış dalga gerilim
seviyesi
ve
olarak iki seviyeden oluşmaktadır. Üç seviyeli eviricilerde
giriş besleme gerilimi ise, çıkış dalga gerilimi
, 0 ve
olarak üç
seviyeden oluşmaktadır. Seviyenin artmasıyla beraber çıkış dalga şekli daha fazla
sinüsoidal dalga şekline benzemektedir (Holtz, 1994; Nabae et al., 1981; Bingöl
2005).
DGM, giriş genliğinin sabit tutulduğu ancak bu genliğin uygulama süresinin ya da
darbe genişliğinin çıkışta istenilen şekle göre ayarlanarak, darbe dizisi biçimindeki
işaretlerin oluşturulduğu yöntemdir. Yaygın olarak kullanılan üç DGM tekniği
kullanılır. Bunlar; sinüsoidal DGM, histerisiz DGM ve uzay vektör DGM olarak
adlandırılırlar (Li, 1999). Bu çalışmada uzay vektör DGM tekniği kullanılmıştır.
Denetim sistemleri temelde açık ve kapalı döngü denetim sistemleri olarak iki ana
gruba ayrılır. Açık döngü denetim sistemlerinde, denetim sinyali çıkıştan
bağımsızdır. Kapalı döngü denetim sistemlerinde ise sistemin çıkışından girişine geri
besleme yapılır. Sistemin girişine uygulanan referans sinyal ile sistemin çıkışından
geri besleme yapılarak elde edilen gerçek sinyal karşılaştırılarak hata sinyali elde
edilir. Denetleyici bu hata değerini giriş olarak alır ve kendi denetim sistemine göre
bir çıkış değeri üretir. Bu çıkış değeri denetlenen sisteme giriş işareti olarak iletilir.
Klasik denetleyiciler oransal denetim etkisi (P), integral denetim etkisi (I) ve türev
denetim etkisinin (D) bir arada kullanılmasıyla oluşturulur. En sık kullanılan klasik
denetleyiciler PI denetleyici ve PID denetleyicidir. Klasik denetim yöntemleri ile
yüksek performans elde edilmek istenirse, bu sistemlerin iyi tanımlanmış olması
gerekir. Doğrusal olmayan yapıdaki sistemlerin matematiksel modellenmesi tam
3
olarak yapılamamaktadır (Boz, 2011). Bu tip sistemlerin denetiminde yapay zeka
tekniklerinin kullanılması ile daha başarılı sonuçlar elde edilir.
Klasik küme teorisinde bir eleman kümenin ya elemanıdır ya da değildir. Kısmi
üyelik kavramı klasik küme teorisinde yer almamaktadır. İnsanın karar verme ve
çıkarım yapma yeteneğinden esinlenerek, bulanık küme teorisi ortaya çıkmıştır.
Bulanık küme teorisinde bir elemanın kümeye ait olma derecesi vardır. Bu dereceye
üyelik derecesi denilmektedir. BM denetleyicisinin tanımlanmasındaki işlem
basamakları temel olarak şu şekildedir; denetleyicinin her bir giriş değeri için üyelik
fonksiyon kümesi tanımlanır. Çıkış üyelik fonksiyonları tanımlanıp, kural tabanı
oluşturulur. Karar verme ve son olarak da durulaştırma metotları belirlenir (Ekren,
2009; Elmas, 2007).
YSA‟ lar, insan beynindeki sinirlerin çalışma biçimi taklit edilerek geliştirilmiş,
öğrenme ve hatırlama gibi yeteneklere sahip bilgi işleme yapılarıdır. İnsan sinir
sistemindeki gibi hücreler arasında bağlantı mevcuttur ve bu bağlantıların bağlı
olduğu hücreye etkisini gösteren ağırlık değeri tanımlanmıştır. Bu yapı YSA‟ lara
öğrenme yeteneği kazandırmıştır. Bu çalışmada kullanılan çok katmanlı perceptron
modelinde, giriş ve çıkış katmanlarındaki hücre sayıları belirlendikten sonra, gizli
katmanların ve gizli katmanlardaki hücrelerin sayıları belirlenir. Ağ eğitim verileri
kullanılarak eğitilir. YSA yeteri kadar eğitildiğinde eğitim işlemi sonlandırılır.
Eğitme işlemi aslında hücrelerin arasındaki ağırlık değerlerini ve hücrelerin eşik
değerlerini ayarlamaktan ibarettir. YSA‟ lar veri sınıflandırma, en uygun değeri
bulma ve model seçimi gibi alanlarda kullanılabilir (Elmas, 2007).
BM denetleyicisi çıkarım yapma ve karar verme konularında iyidir. YSA‟ lar ise
öğrenme ve örnekleri tanımlama konularında iyidir. Sinirsel bulanık mantık kavramı
bu iki denetleyicinin iyi yönlerini birleştirme fikri ile ortaya çıkmıştır. Sinirsel
bulanık denetleyicideki asıl amaç BM denetleyicinin parametrelerini ayarlamaktır.
Bu yolla, BM denetleyicide ayarlanması gereken, her bir giriş için üyelik
fonksiyonlarının tanımlanması, çıkış üyelik fonksiyonlarının tanımlanması ve kural
4
tabanın oluşturulması işlemleri gerçekleştirilmiş olur. Farklı sinirsel bulanık
denetleyici sistemleri zaman içerisinde tanımlanmıştır (Elmas, 2007).
Bu çalışmada sinirsel bulanık denetleyicilerden biri olan adaptive neuro fuzzy
interface system (ANFIS) sinirsel bulanık denetleyicisi kullanılmıştır. ANFIS sinirsel
bulanık denetleyicisinin yapısı 4 katmandan oluşmaktadır. İlk katman giriş
katmanıdır. İkinci katman üyelik katmanıdır ve bu katmanda giriş değerleri için
üyelik fonksiyonları tanımlanır. Tanımlanan bu fonksiyonların merkezleri ve genişlik
değerleri de yine bu katmanda ayarlanmaktadır. Üçüncü katman kural katmanı olarak
adlandırılır. Bu katmanda çıkış üyelik fonksiyonları ayarlanmaktadır. İkinci
katmandaki hücreler ile üçüncü katmandaki hücrelerin bağlantıları, otomatik olarak
kural tabanının oluşturulmasını sağlar. Son ve dördüncü katman olan çıkış katmanı
ise denetleyici çıkışının verildiği katmandır (Elmas vd., 2008).
Eğitimde teorik bilgilerin uygulama ile desteklenmesi, öğrenme hızını arttırmakta ve
öğrenmenin kalıcı olmasını sağlamaktadır. Pratik becerileri kazanabilmek için pahalı
laboratuvar sistemlerine gereksinim duyulmaktadır. Bu gereksinim, eğitim amaçlı
olarak geliştirilen daha düşük maliyetli ve uygun öğrenme ortamı sağlayan simülatör
programları ile giderilmeye çalışılmaktadır. Simülatörler, gerçek sistemlerin çalışma
şartlarını bilgisayar ortamında taklit eden yazılımlardır. Eğitim amaçlı geliştirilen
simülatör programları, farklı bilim dalları için yeterince esnek ve interaktif değildir
(Akçayol vd., 2002; Gökbulut vd., 2006; Yiğit ve Elmas, 2008).
Günümüzde bilgisayar ve internet teknolojisi öğrencilere, araştırmacılara ve
eğitimcileri pek çok olanak sunmaktadır. İnternet ortamında BM, YSA ve sinirsel
bulanık mantık ile ilgili siteler mevcuttur. Ayrıca bu denetleyiciler ile ilgili yazılım
paketleri de bulunmaktadır. Fakat bu yazılım paketleri sınırlı kapasitede geliştirilmiş
olup, elektrik makineleri uygulama alanları için uygun değillerdir. İyi bilinen ticari
yazılım paketlerinden birisi de Mathworks Inc. tarafından geliştirilen
MATLAB/Simulink programıdır. Bu yazılım paketi ile modelleme ve kontrol ile
ilgili birçok tasarım yapılabilse de kullanması belirli bir bilgi birikimi ve deneyim
gerektirmektedir (Akçayol vd., 2002).
5
Bu çalışmanın amacı öğrencilerin laboratuvar ortamında yaptıkları ASM‟ nin hız
kontrolü deneylerinin, zaman ve mekandan bağımsız olarak simülasyonunun
yapılabilmesi için simülatör programı tasarlamaktır. Simülatör programında
öğrencinin öğrenmesi tamamen kendi kontrolü altındadır. Laboratuvar ortamında
deneyler kısıtlı bir zamanda yapılmak zorundadır. Deneyden sonra hala anlaşılmayan
kısımlar, simülatör ortamında deneyin tekrarı yapılarak kalıcı bir şekilde
öğrenilebilir. Laboratuvar ortamında denenmesi sakıncalı olan uygulamalar da
simülatör üzerinde rahatlıkla denenebilir, sonuçları gözlemlenebilir. Simülatör
üzerinde deney yapan öğrenci gerçek laboratuvar ortamında zorluk çekmeyecektir.
Uzaktan eğitim, öğretmen ile öğrencinin bir ayara gelmesinin zor olduğu durumlarda
öğrencinin ders dokümanlarına ulaşması için düşünülmüş bir eğitim sistemidir.
Hazırlanan simülatör programı uzaktan eğitim sisteminde yardımcı kaynak olarak
kullanılabilir.
Yapılan çalışmada PI, PID, BM, YSA ve sinirsel bulanık denetleyiciler ile evirici
temelli asenkron motorun hız kontrolü için, simülatör programı hazırlanmıştır.
Hazırlanan simülatör Visual Studio 2010 IDE‟ sinde WPF alt yapısı kullanılarak, C#
programlama dili ile yazılmıştır. Simülatör, esnek bir yapıya ve grafiksel bir ara yüze
sahiptir. Hazırlanan simülatör ile ASM‟ nin, eviricinin ve denetleyicilerin
parametreleri değiştirilerek sistemin farklı çalışma durumlarındaki tepkisi grafikler
yardımıyla izlenebilmektedir.
6
2. KAYNAK ÖZETLERİ
Chow ve arkadaşları (1991), YSA kullanarak ASM‟ nin hızındaki titreşimlerin daha
az olmasını sağlamışlardır. Gerçek uygulamalarda % 95 oranında daha iyi
performans gösterdiği sonucuna ulaşmışlardır.
Elmas ve Coşkun (1995), YSA kullanarak ASM‟ nin stator akımlarının uyarlanabilir
denetimlerini yapmışlardır. Çalışma sonucunda sistemin çıkışının referans sinyali
takip ettiği, sadece ani referans sinyali değişimlerinde hata oluştuğu ve genel denetim
performansının iyi olduğu sonucuna ulaşılmıştır.
Winshart ve Harley (1995), YSA‟ ları kullanarak iki sistem sunmuşlardır. Birincisi
elektriksel dinamikleri tanımlanma vasıtasıyla stator akımlarının uyarlanabilir
kontrolü, ikincisi ise mekaniksel ve akımı beslemeli sistemin dinamikleri tanımlama
vasıtasıyla rotor hızının uyarlanabilir kontrolüdür.
Pinheiro ve arkadaşları (1996) yapmış oldukları çalışmalarında faz kontrollü
doğrultuculara alternatif olarak AA/DA doğrultuculardaki güç faktörünün
düzeltilmesi için yeni bir YSA denetleyicisi geliştirmişlerdir. Elde ettikleri
sonuçlarında, güç faktörünü bire yaklaştırmışlar ve daha hızlı tepki süresi elde
etmişlerdir.
Leyva ve arkadaşları (1997) yapmış oldukları çalışmada, gerilim beslemeli DGM‟ li
eviricilerde YSA modelini oluşturmuşlardır. Oluşturdukları bu modelle evirici için
gerekli tetikleme sinyallerini üretmişlerdir. Üretmiş oldukları bu sinyaller sayesinde
evirici çıkışındaki gerilim harmoniklerini aza indirmişlerdir.
Ye ve arkadaşlarının (2001) ve Tallam ve arkadaşlarının (2003), yaptıkları çalışmada
ASM‟ lerin stator ve rotor sargıları ile mekaniksel kısımlarında meydana gelebilecek
hataların tespiti için, YSA modeli kullanmışlardır. Çalışma sonuçlarında YSA
modelinin yüksek doğrulukta çalıştığı ve ticari uygulamalar için uygun olduğu
sonucuna ulaşmışlardır.
7
Abu-Rub ve Awwad‟ ın (2009) yaptıkları çalışmada ASM‟ nin hızının sensörsüz
kontrolü için yapay zeka teknikleri ile klasik PI denetleyicisini kullanmışlardır. Hem
YSA denetleyicisinin hem de BM denetleyicisinin klasik PI denetleyiciye göre daha
performanslı çalıştığı sonucuna varmışlardır. Ayrıca YSA denetleyicisinin BM
denetleyicisine göre de iyi performans gösterdiği gözlemlenmiştir.
Gupta ve arkadaşları (2009) yaptıkları çalışmada vektör kontrollü ASM sürücüsünün
sensörsüz hız kontrolü için ANFIS denetleyicisini kullanmışlardır ve ANFIS
denetleyicisinin yüksek performans gösterdiği sonucuna ulaşmışlardır.
Kashif ve arkadaşlarının (2009) yaptığı çalışmada uzay vektör DGM ile ASM‟ nin
hızının kontrolünü YSA denetleyicisi ile gerçekleştirmişlerdir.
Shao ve arkadaşlarının (2009) yaptığı çalışmada yapay zeka teknikleri ile ASM‟ nin
hızının kontrolünü simüle etmişlerdir ve yapay zeka teknikleri kullanılarak yapılan
denetimin efektif ve doğru bir şekilde gerçekleştirilebileceği sonucuna ulaşmışlardır.
Mechernene ve arkadaşlarının (2010) yaptığı çalışmada ASM‟ nin hız kontrolü için
ANFIS denetleyicisini kullanmışlar ve iyi tepki verdiği sonucuna ulaşmışlardır.
Venugopal (2010) yaptığı çalışmada, matrix çevirici ile sürülen ASM‟ nin hız
kontrolü için ANFIS denetleyicisini kullanmıştır. ANFIS denetleyicisini klasik PI
denetleyici ile karşılaştırmış ve ANFIS denetleyicisinin yüksek performanslı
uygulamalarda PI denetleyiciye göre daha iyi tepki verdiği sonucuna ulaşmıştır.
Baruch ve de la Cruz (2010) yaptıkları çalışmada, ASM‟ nin dolaylı vektör kontrolü
için YSA denetleyicisini kullanmışlardır. YSA denetleyicisinin klasik PI
denetleyiciye göre daha iyi cevap verdiği sonucuna ulaşmışlardır.
Baruch ve arkadaşlarının (2010) yaptığı çalışmada histerisiz direkt tork vektör
kontrolü ile ASM‟ nin hız kontrolü için özyinelemeli YSA denetleyicisini
8
kullanmışlardır. YSA‟ nın klasik PI denetleyiciye göre daha performaslı çalıştığı
sonucuna ulaşmışlardır.
Shun-Yuan ve arkadaşlarının (2010) yaptıkları çalışmada direkt tork kontrollü ASM‟
nin hız kontrolü için YSA tabanlı PI denetleyici kullanmışlardır. Bu denetleyicinin
çevresel şartların değişiminde klasik PI denetleyiciye göre daha performanslı çalıştığı
sonucu elde edilmiştir.
Arulmozhiyal ve arkadaşlarının (2011) yayınladıkları makalede, uzay vektör DGM
ile dolaylı vektör denetimli ASM‟ nin hız kontrolü için klasik PI ve BM
denetleyicilerini kullanarak simülasyon ve gerçek zamanlı uygulamalarını
yapmışlardır. Aynı çalışma koşulları altında BM denetleyicisi PI denetleyiciye göre
daha iyi performans göstermiştir.
Himanshu ve arkadaşlarının (2011) yaptıkları çalışmada, düşük çıkış gerilimi ve
yüksek akım gerektiren yükler için DC-DC çevirici kullanarak yapay zeka
tekniklerini denemişlerdir. Hem YSA denetleyicisinin hem de BM denetleyicisinin
PID denetleyiciye göre daha iyi tepki verdiği sonucuna ulaşmışlardır.
Xiaoguang ve arkadaşları (2011) yaptıkları çalışmada sabit mıknatıslı senkron
motorun hız kontrol için YSA denetleyicisi kullanmışlardır. Çevresel etkiler
karşısında YSA sürücüsünün hızlı tepki verdiği görülmüştür.
Akçayol ve arkadaşları (2002) yaptıkları çalışmada bulanık mantık ile BDCM‟ nin
hız kontrolü için eğitim seti tasarlamışlardır. Motor ve denetleyici parametreleri
kullanıcı tarafından değiştirilebilmektedir.
Dandil ve Gökbulut (2005) yaptıkları çalışmada, ASM‟ nin dolaylı vektör denetim
yapısında histerisiz DGM ve hız denetleyicisi olarak sinirsel bulanık denetleyici
kullanarak, ASM‟ nin hız denetimini Matlab programı yardımıyla simüle etmişlerdir.
Simülasyon sonuçlarının ASM‟ nin hız denetiminde başarılı olduğu ancak deneysel
olarak da incelenmesi gerektiği sonucuna ulaşmışlardır.
9
Gökbulut ve arkadaşları (2006) yaptıkları çalışmada, iki seviyeli evirici ile beslenen
ASM‟ nin hız kontrolü için eğitim seti hazırlamışlardır. ASM‟ nin hız denetimi için
klasik PI ve sinirsel bulanık denetleyici kullanılabilmektedir. Eğitim setinde motor ve
denetleyici parametreleri kullanıcı tarafından ayarlanabilmektedir.
Elmas ve Yiğit (2008) yaptıkları çalışmada, DGM‟ li üç fazlı bir eviricinin bilgisayar
ile denetimi ile ilgili bir eğitim seti hazırlamışlardır. Çalışma yazılım ve donanım
olarak iki bölümden oluşmaktadır. Yazılım bölümünde farklı DGM tekniklerinin
evirici denetiminde yaptığı etkiler ile ASM‟ nin fazlarındaki akımların ve
gerilimlerin grafikleri incelenebilmektedir.
Bayındır ve arkadaşları (2008) yaptıkları çalışmada senkron motor ile yapılan reaktif
güç kompansatörü denetiminde YSA modeli tasarımı ve uygulaması için simülatör
tasarlamışlardır. Çalışma sonunda YSA yapısının gerçek zamanlı uygulamalara
adapte edilebileceği sonucuna ulaşmışlardır. Çalışmada karşılaşılan güçlükler ise
uygun performansı elde edebilmek için simülatördeki YSA modelinin tekrar tekrar
eğitilmesi gerektiği ve test düzeneği için dışarıdan veri elde edilmesi gerekliliğidir.
Yiğit ve Elmas (2008) yaptıkları çalışmada, anahtarlamalı relüktans motorun hız
kontrolü için klasik PI denetleyici ve genetik PI denetleyici kullanılabilen bir eğitim
seti tasarlamışlardır. Eğitim setinde motorun ve denetleyicilerin parametreleri
kullanıcı tarafından ayarlanabilmektedir.
Bingöl ve Paçacı (2010) yaptıkları çalışmada, klasik PI ve PID denetleyiciler ve
bulanık mantık denetleyicisi ile PMDC motorun hız kontrolü için sanal laboratuvar
tasarımı yapmışlardır. Eğitim setinde PMDC motorun ve denetleyicilerin
parametreleri kullanıcı tarafından ayarlanabilmektedir. Simülasyon sonuçları
grafikler yardımıyla incelenebilmektedir.
10
2.1. Kuramsal Temeller
Bu bölümde hazırlanan simülatör programının alt yapısını oluşturan asenkron motor
ve matematiksel modeli, evirici kavramı ve çok seviyeli eviriciler, darbe genişlik
modülasyonu ve uzay vektör DGM, bulanık mantık denetleyicisi, yapay sinir ağı
denetleyicisi ve sinirsel bulanık denetleyiciler konuları anlatılmıştır.
2.1.1. Asenkron motorlar
ASM‟ ler genel olarak stator ve rotor olmak üzere iki kısımdan oluşmaktadır. Stator,
ASM‟ nin duran kısmıdır. Rotor ise dönen kısmıdır. ASM‟ nin rotoru, kısa devreli
rotor (sincap kafesli rotor) ve sargılı rotor (bilezikli rotor) olmak üzere iki çeşittir.
ASM‟ ler, rotorun yapım biçimine göre bilezikli ve sincap kafesli asenkron motor
olarak tanımlanmaktadır. Ayrıca diğer elektrik makinelerine göre daha ucuzlardır ve
bakıma daha az ihtiyaç duyarlar. ASM‟ ler sağlam, güvenilir, maliyeti düşük, az
bakım gerektiren, çevresel koşullardan etkilenmeme gibi özelliklere sahiptirler.
Bunların yanında tehlikeli ve kirli ortamlarda da kullanılabilirler. Bu özelliklerinden
dolayı ASM‟ ler endüstriyel uygulamalarda yaygın olarak kullanılmaktadır. Yaygın
kullanıma bağlı olarak, endüstriyel tesislerde ASM‟ lerin değişik hızlarda
çalıştırılmaları gerekmiştir (Bose, 1997; Saygın, 2004; Bingöl, 2005).
2.1.1.1. Üç fazlı asenkron motorun matematiksel modeli
Bir sistemin fiziksel davranışının benzetimini yapmak için, matematiksel modelinin
çıkarılması gereklidir. Matematiksel modeller, sistemin gerçek fiziksel davranışına
olabildiğince yakın olmalıdır. Sistemin modelinin doğruluğunu artırmak için fiziksel
büyüklükler skaler değil, vektörel olarak ele alınmalıdır. Bu yolla özellikle
motorların geçici hal davranışlarında oluşacak hata önemli derecede azalacaktır
(Gülez, 1999).
Üç-fazlı ASM‟ nin matematiksel modeli oluşturulurken aşağıda belirtilen modelleme
varsayımları kullanılacaktır;
11
Stator sargıları stator olukların düzgün olarak yerleştirilmiş olup hava
aralığındaki akının sinüsoidal olduğu,
Manyetik devre doğrusal kabul edildiğinden doymanın oluşmadığı,
Stator ve rotor sargılarının, direnç ve endüktansları frekans ve sıcaklık etkisi ile
değişmediği,
Akım yığılması olayının ihmal edildiği,
Manyetik kısımların geçirgenliğinin sonsuz olduğu,
Histerisiz ve fuko kayıplarının ihmal edildiği,
Rotor çubuklarının, rotor eksenine göre simetrik olarak yayıldığı,
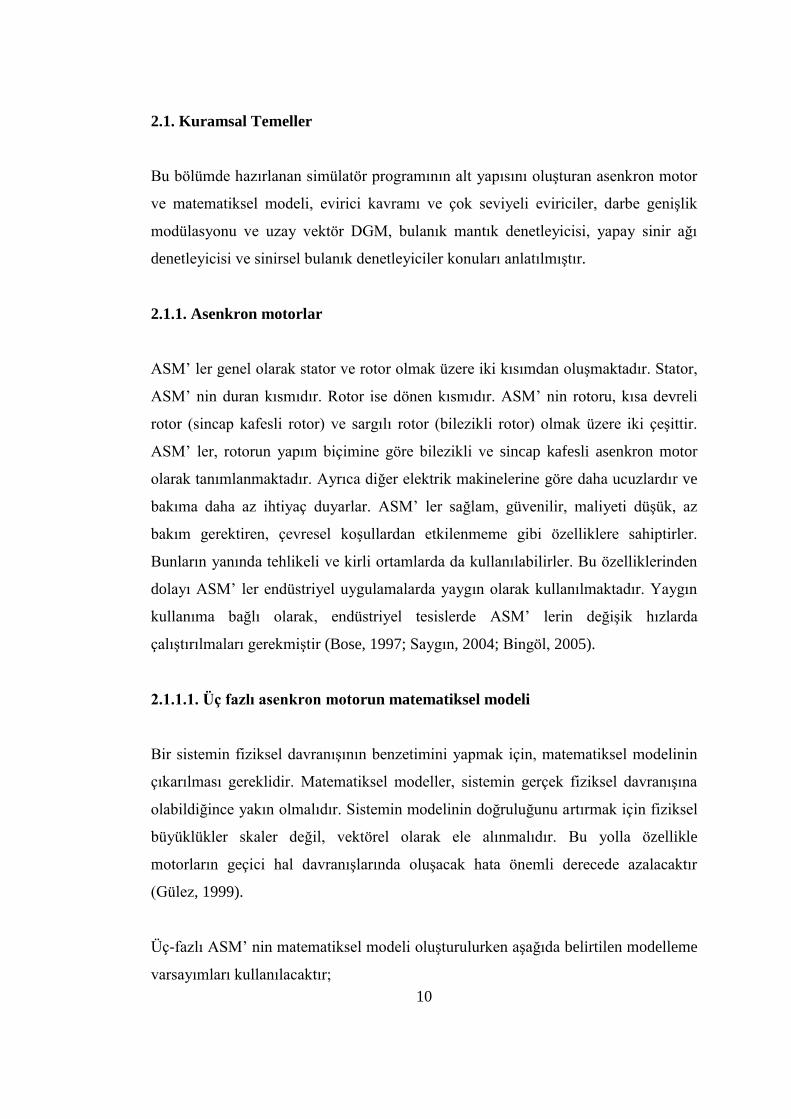
Stator ve rotor sargılarının dengeli olduğu ve stator sargılarının eşit olarak sarıldığı
kabul edilir. Stator sargıları as, bs ve cs olarak isimlendirilir. Stator sargılarının sarım
sayıları (Ns) birbirine eşittir. Sargılar arasında ±120o faz farkı olup as sargısına
simetrik olarak stator oyuklarına yerleştirilmiştir. Alt indis olarak “s” kullanılması
stator veya durağan sargıları olduğu anlamına gelir. Aynı şekilde rotor sargıları, ar,
br ve cr olarak isimlendirilir. Alt indis olarak “r” kullanılması “rotor” veya “döner”
sargıları olduğu anlamına gelir (Lipo, 1995). Şekil 2.1.‟ de 3 fazlı asenkron motorun
manyetik eksen düzlemi verilmiştir.
asV
arVbrV
crV
aribri
cri
+-- -
+
+
asi
+-
bsi
+
-bsV
eksenibs
eksenibr
eksenias
ekseniar
eksenicr eksenics
csV
csi
r
r
r
-
+
1Şekil 2.1. Üç-fazlı asenkron motorun manyetik eksen düzlemi (Bingöl, 2005)
12
[
] [
]
Şekil 2.1.‟ deki stator ve rotor devrelerinin gerilim denklemleri Denklem 2.1.‟ de
gösterildiği gibi ifade edilir. Denklem 2.1.‟ deki rs; stator faz direncini, as, bs, cs;
stator faz akılarını ifade etmektedir.
(2.1)
Rotor gerilimleri ise Denklem 2.2.‟ de gösterildiği gibidir. Burada rr; rotor faz
direncini, ar, br, cr; rotor faz akılarını ifade etmektedir. Stator ve rotor fazlarındaki
değişimler, akı değerlerinde birbirlerine etki etmektedir.
(2.2)
Motorun faz akıları akımlara bağlı olup Denklem 2.3.‟ deki gibi ifade edilir.
(2.3)
Denklem 2.3.‟ de gösterilen denklemler matrissel formdaki ifadeler olup Denklem
2.4.‟ de gösterildiği gibi tanımlanabilir.
(2.4)

13
Denklem 2.3.‟ de görüleceği gibi tüm değişkenler aynı düzleme aktarılmaktadır.
Stator düzleminde faz akıları bulunacak olursa; stator faz akımlarının oluşturduğu
akıların stator düzlemindeki değeri ile rotor faz akımlarının oluşturduğu akılarının
stator düzlemine aktarılmış değerlerinin toplamına eşit olduğu görülür. Denklem 2.3.
incelenecek olursa aşağıdaki eşitlikler elde edilir.
[
] [
] (2.5)
[
] [
] (2.6)
[
] [
] (2.7)
[
] [
] (2.8)
Statorun bir faz endüktansı, kaçak endüktans (Lls) ve mıknatıslanma endüktanslarının
(Lms) toplamına eşittir. Dengeli sistemlerde her faz endüktansı aynı olup ifadesi
Denklem 2.9.‟ daki şekilde yazılır.
(2.9)
Stator faz sargıları arasındaki ortak endüktansın ifadesi ise Denklem 2.10.‟ da
gösterildiği gibi yazılır.
(2.10)
Stator sargılarının as, bs ve cs fazlarına bağlı olarak akı bağlarının matrissel olarak
ifadesi yazılırsa Denklem 2.11. elde edilir.

14
[
]
[
]
(2.11)
Stator ve rotor sargıları arasında ortak bağ bulunmaktadır. Şekil 2.1.‟ de rotor fazı
ve stator fazı arasında elektriksel açısı vardır ve değişkendir. Benzer şekilde
rotor fazları ve sırasıyla stator fazları ve arasında da elektriksel açısı
bulunur. Stator ile rotor arasındaki ortak endüktanslar, sargı eksenleri arasındaki
açının kosinüsüdür. ( - ), ( - ) ve ( - ) sargıları arasında açısı vardır.
Denklem 2.12.‟ de bu durum gösterilmiştir.
[
] [
] (2.12)
Üç fazdan iki faza dönüşümde
alınması gerekir (Lipo, 1995).
2.1.1.2. Üç fazdan iki faza dönüĢüm
Üç fazlı motorun altı sargısı arasında manyetik bir bağlantı vardır. Bu bağlantıların
basitleştirilmesi için hava aralığı manyeto motor kuvveti (mmk) iki dik düzlem
yönünde bileşenlere ayrılır. Bu iki düzlem direct (dikine) ve quadrature (enine)
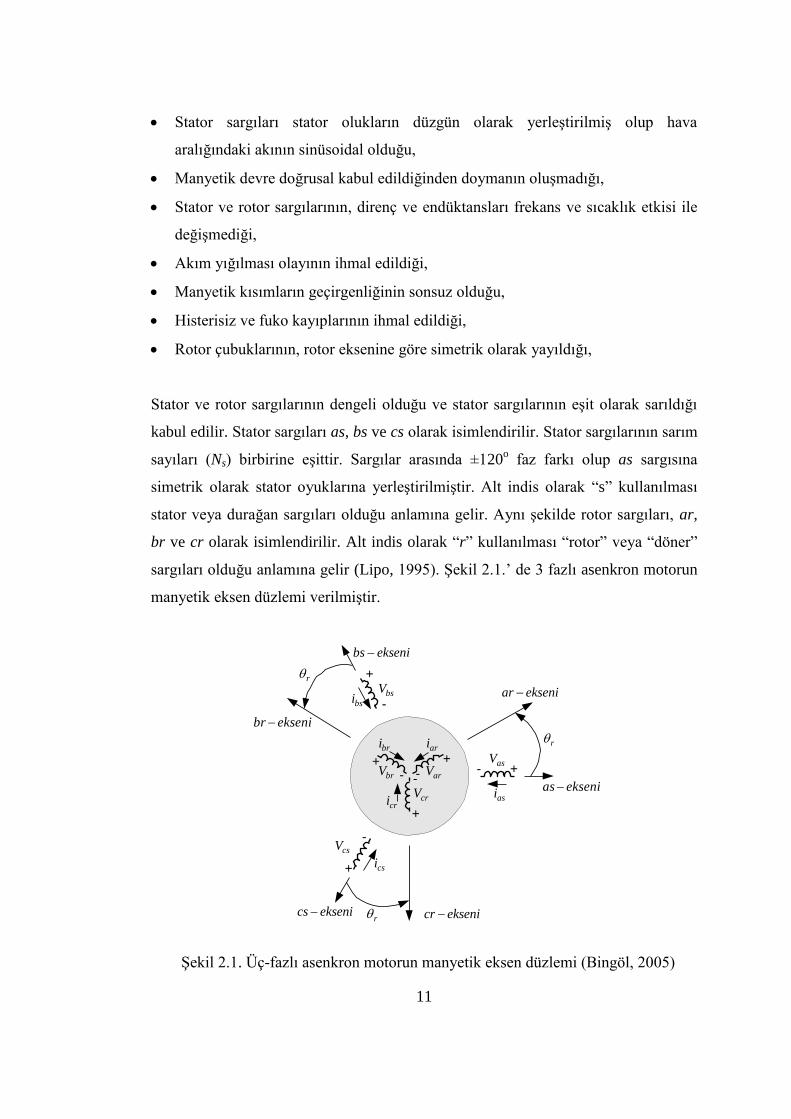
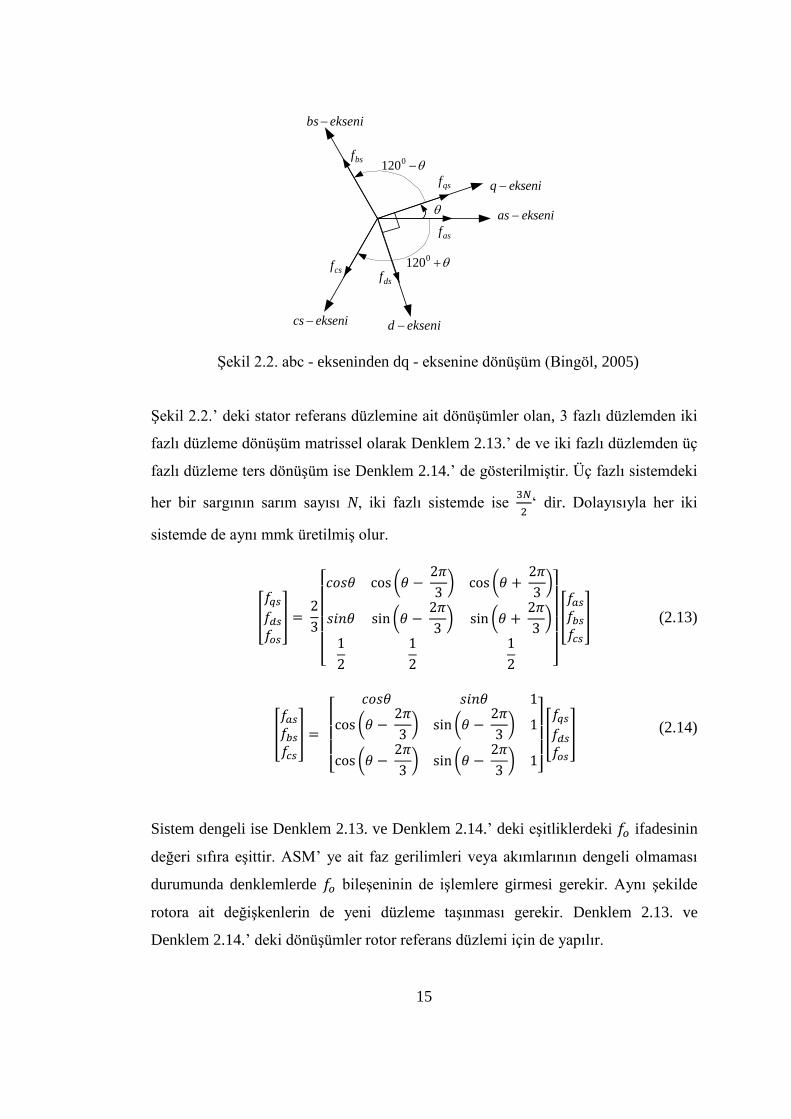
olarak adlandırılır. Stator ve rotor değişkenleri bu iki düzleme aktarılır. Şekil 2.2.‟ de
üç fazlı eksen (abc) ile iki fazlı eksen (dq) arasındaki geometrik ilişki gösterilmiştir.
Şekildeki a ekseni ile q ekseni arasında açısı olup, d ekseni q ekseninin 900
gerisindedir (Bingöl, 2005).
15
[
]
[ (
) (
)
(
) (
)
]
[
]
[
]
[
(
) (
)
(
) (
) ]
[
]
asf
eksenias
qsf
bsf
eksenibs
csf
eksenics eksenid
dsf
0120
0120
ekseniq
2Şekil 2.2. abc - ekseninden dq - eksenine dönüşüm (Bingöl, 2005)
Şekil 2.2.‟ deki stator referans düzlemine ait dönüşümler olan, 3 fazlı düzlemden iki
fazlı düzleme dönüşüm matrissel olarak Denklem 2.13.‟ de ve iki fazlı düzlemden üç
fazlı düzleme ters dönüşüm ise Denklem 2.14.‟ de gösterilmiştir. Üç fazlı sistemdeki
her bir sargının sarım sayısı N, iki fazlı sistemde ise
„ dir. Dolayısıyla her iki
sistemde de aynı mmk üretilmiş olur.
(2.13)
(2.14)
Sistem dengeli ise Denklem 2.13. ve Denklem 2.14.‟ deki eşitliklerdeki ifadesinin
değeri sıfıra eşittir. ASM‟ ye ait faz gerilimleri veya akımlarının dengeli olmaması
durumunda denklemlerde bileşeninin de işlemlere girmesi gerekir. Aynı şekilde
rotora ait değişkenlerin de yeni düzleme taşınması gerekir. Denklem 2.13. ve
Denklem 2.14.‟ deki dönüşümler rotor referans düzlemi için de yapılır.

16
2.1.1.3. Asenkron motorun modelinde kullanılan referans düzlemleri
Elektrik motorları analizinde ve güç sistemlerinde ortak kullanılan referans
düzlemleri keyfi, durağan, rotor ve senkron referans düzlemleridir. Referans
düzlemlerinin kendi aralarında dönüşümü mümkündür. Motorun hız ve pozisyonu
denetimine göre kullanılacak kontrol algoritması göz önüne alınarak referans
düzlemlerinde dönüşüm yapılır. Bu durum Şekil 2.3.‟ de gösterilmiştir. Şekildeki üst
indislerden “s” durağan düzlemi, “r” rotor düzlemi, “e” ise senkron düzlemi ifade
etmektedir.
e
eq
sdrd
ed
r
erq
sq
r
3Şekil 2.3. Asenkron motor değişkenlerinin aktarıldığı d - q referans düzlemleri
(Krause et al., 1995)
Durağan referans düzlemi
Durağan referans düzlemindeki (stationary reference frame) gerçek eksen, stator faz
sargılarından birinin eksenine bindirilir. Bu durumda referans düzlemin açısal hız
değeri statora sabitlendiğinden dolayı, hem açısal hız ω = 0 hem de açısal pozisyon θ
= 0 olur. Sabit eksen düzleminde değer alan değişkenler ile ifade edilir
(Krishnan, 2001). Açısal hız sıfır olarak kabul edilirse stator ve rotor kaçak akılarının
denklemleri Denklem 2.15.‟ deki gibidir.

17
(
)
(2.15)
Denklem 2.15.‟ de stator endüktansı şeklinde ifade edilir ve kaçak
endüktansı ile mıknatıslanma endüktansının toplamına eşittir. Aynı şekilde rotor
endüktansının ifadesi de şeklinde ifade edilir ve rotor kaçak
endüktansı ile mıknatıslanma endüktansının toplamına eşittir.
Stator ve rotor gerilimlerinin stator eksendeki ifadesi Denklem 2.16.‟ daki gibidir.
(2.16)
ASM‟ lerde üretilen elektromanyetik moment ifadesi Denklem 2.17.‟ deki gibidir.
Bu denklemdeki P; kutup sayısını, ; üç faz süzleminden iki faz düzlemine
indirgenmiş stator mıknatıslanma endüktansını ifade eder.
(2.17)
Motorun dengeli bir kaynaktan beslendiği varsayılırsa akımların toplamı sıfırdır. Bu
durumda olduğu kabul edilir. İki fazlı sistemi Denklem
2.18.‟ deki gibi ifade edilir.

18
√
(
)
(2.18)
Senkron referans düzlemi
ASM stator ve rotor değişkenleri senkron referans düzleme aktarılır. Bu durum Şekil
2.2.‟ de ve olması durumudur. Senkron eksen takımında
dönüşümler için motor senkron elektriksel hız ve pozisyon değeri kullanılır. Stator ve
rotor akılarının eşitlik ifadeleri Denklem 2.19.‟ daki gibidir. Denklem 2.20.‟ de ise
gerilimlerin senkron eksen düzlemindeki ifadeleri verilmiştir.
(2.19)
(2.20)
ASM‟ de üretilen elektromanyetik moment ifadesi Denklem 2.21.‟ de verilmiştir.
(2.21)
Denklem 2.21.‟ deki elektromanyetik moment ifadesi ASM‟ nin senkron hızda dönen
düzlem sistemindeki elektriksel davranışlarından çıkartılmıştır. Denklem 2.22.‟ de
ise; elektromanyetik moment ifadesi, ASM‟ nin senkron hızda dönen düzlem

19
∫ ∫
sisteminde dinamik davranışından çıkartılmıştır. Bu denklemdeki J atalet momenti,
mekaniksel hız, B sürtünme katsayısı ve yük momentidir.
(2.22)
Referans düzlemleri arası dönüşüm
ASM hız kontrolü için kullanılacak denetleyicilerde değişik referans düzlem
dönüşümleri gerekebilir. Durağan düzlemden senkron referans düzleme dönüşüm
genellikle alan yönlendirmeli kontrol tekniğinde gerekli olmaktadır. Aynı şekilde
senkron referans düzlemden durağan referans düzleme dönüşüm de gereklidir
(Bingöl, 2005). Durağan referans düzlemden senkron referans düzleme dönüşüm
Denklem 2.23.‟ de gösterildiği gibidir. Senkron referans düzleminden tekrar durağan
referans düzlemine çevrim ise Denklem 2.24.‟ de gösterilmiştir.
[
] [
] [
] (2.23)
[
] [
] [
] (2.24)
2.1.1.4. Dolaylı vektör kontrol yöntemi
Dolaylı vektör kontrol yönteminde rotor miline yerleştirilen pozisyon veya hız
algılayıcısı kullanılır. Şekil 2.4.‟ de dolaylı vektör kontrolüne ait düzlem dönüşümleri
gösterilmiştir. eksenleri stator eksenine sabitlenmiş olup durağan haldedir.
Rotor değişkenleri ise rotor eksenine sabitlenmiş olup hızında
dönmektedir. Senkron referans ekseni ile rotor referans ekseni arasında
pozitif kayma açısı vardır. Dolayısıyla senkron pozisyon, rotor pozisyonu ile
kayma pozisyonunun toplamı veya senkron hız rotor hızı ile kayma hızının
toplamının integraline eşittir. Bu durum Denklem 2.25.‟ de gösterilmiştir.
(2.25)

20
Senkron referans düzlemi için stator ve rotor gerilim eşitlikleri Denklem 2.20.‟ de
gösterilmişti. Sincap kafesli asenkron motorda, rotor devresi kısa devre edildiği için
rotor gerilimleri sıfır olarak alınır. Rotor devresi gerilimleri Denklem 2.26.‟ daki
gibidir.
(2.26)
Senkron hız durumundan rotor hızı çıkarıldığında kayma hız değeri elde edilir. Bu
durum Denklem 2.27.‟ de gösterilmiştir.
(2.27)
eq
sq
sd
sqsi
eqsi
sdsi
edsi
rsl
sı
sdr
sqr
ederd
r
eqsi
0eqr
redr
rotor
ekseni
e
sl
4Şekil 2.4. Dolaylı vektör kontrolüne ait düzlem dönüşümleri (Bingöl, 2005)
Senkron referans düzlemi için akı denklemleri göz önüne alınarak ve rotor devresi
akı eşitliğini kullanarak rotor devresine ait akımlar Denklem 2.28.‟ deki gibi ifade
edilir.

21
(
)
(2.28)
Alan yönlendirmeli kontrolde, rotor akı vektörü birbirinden bağımsız
ve
değerlerinin vektörel bileşkesinden oluşmaktadır. Denetlenecek değişken sayısının
bire indirilmesi için akı vektörlerinden sıfıra eşitlenir. Akının sıfır olması türevini
de sıfır yapacaktır. Bu durumda rotor akı vektörü, akının sadece bileşeninden
oluşacaktır. Denklemler yeniden yazılacak olursa kayma hız değeri Denklem 2.29.‟
daki gibi elde edilir.
(2.29)
Senkron dönen referans düzleminde rotor mıknatıslanma akımı Denklem 2.30.‟ da
verilmiştir.
(2.30)
Bu durumda ifadesi yeniden düzenlenecek olursa Denklem 2.31.‟ deki gibi
yazılabilir.
(2.31)
ifadesi yeniden düzenlenecek olursa Denklem 2.32.‟ deki gibi yazılabilir.
(2.32)
Denklem 2.21.‟ deki elektromanyetik moment ifadesindeki rotor akımları yerine
motor akıları kullanılarak tekrar yazılırsa Denklem 2.33. elde edilir.
(2.33)
22
(
)
değerinin sıfıra eşitlenerek değişken sayısının bire indirgeneceği daha önce
anlatılmıştı. Bu durum Denklem 2.33.‟ e uygulanırsa akımı Denklem 2.34.‟ deki
gibi olur.
(2.34)
Denklem 2.33.‟ deki elektromanyetik moment ifadesi ise Denklem 2.35.‟ deki gibi
yazılır.
(2.35)
2.1.2. Üç seviyeli evirici ve modülasyon teknikleri
Eviriciler, girişindeki doğru akım gerilimini istenilen değer ve frekansta alternatif
akım gerilimine dönüştüren ve bu gerilimi çıkış olarak veren çeviricilerdir.
Girişindeki doğru akım gerilimi sabit ya da değişken olabilir.
Eviriciler çalışma alanlarına göre ikiye ayrılırlar. Bunlar, bir fazlı ve üç fazlı
eviricilerdir. Genellikle bir fazlı eviriciler genellikle kesintisiz güç kaynaklarında
(UPS) kullanılırlar. Üç fazlı eviricilerden gerilim beslemeli eviriciler alternatif akım
motor sürücü sistemleri, kesintisiz güç kaynakları ve indüksiyon ısıtma sistemlerinde
kullanılmaktadırlar. Üç fazlı eviricilerden akım beslemeli olanlar ise büyük güçlü
alternatif akım motor sürücü sistemlerinde kullanılırlar (Bose, 2002).
Eviriciler sinüsoidal olmayan bir çıkış gerilimi üretirler. Üç fazlı eviricilerde çıkış
gerilimleri simetriktir. Eviricinin çıkış gerilimine Fourier analizi yapıldığında temel
bileşenlere ek olarak harmonik bileşenlerinin de olduğu görülmektedir (Bingöl,
2005). Çıkış gerilimindeki harmonikler genel olarak iki durumda en aza
indirgenebilir. Birinci durumda yüksek anahtarlama frekansına sahip yarı iletken
anahtarlara farklı DGM teknikleri uygulanır. İkinci durumda ise eviricinin çıkış dalga
şeklinin seviye sayısı arttırılır (Nabae et al., 1981).
23
Gerilim beslemeli eviriciler genel olarak kare dalga eviriciler ve DGM‟ li eviriciler
olarak ikiye ayrılırlar (Tuncay et al., 2003).
Kare dalga eviricilerin çıkış geriliminin genliği, girişindeki doğru akım geriliminin
ayarlanmasıyla sağlanır. Dolayısıyla evirici sadece çıkış geriliminin frekansını
kontrol eder. Çıkış geriliminin şekli kare dalga biçimindedir ki bu tip eviricilere
gerilim beslemeli kare dalga eviriciler denmiştir. Gerilim beslemeli kare dalga
eviricileri içerdikleri yüksek harmonikler nedeniyle daha çok küçük ve orta güçlü
motor uygulamalarında kullanılmışlarıdır (Bingöl, 2005).
Darbe genişlik modülasyonlu eviricilerin girişindeki doğru akım gerilimi hemen
hemen sabittir. Çünkü giriş gerilimi şebeke geriliminin bir doğrultucu tarafından
doğrultulmasıyla sağlanır. Bu sebeple evirici çıkış geriliminin hem genliğini hem de
frekansını ayarlamak zorundadır. Ayarlama işlemi DGM ile yapıldığı için bu tür
eviricilere DGM‟ li eviriciler denmiştir (Holtz, 1994; Bose, 2002).
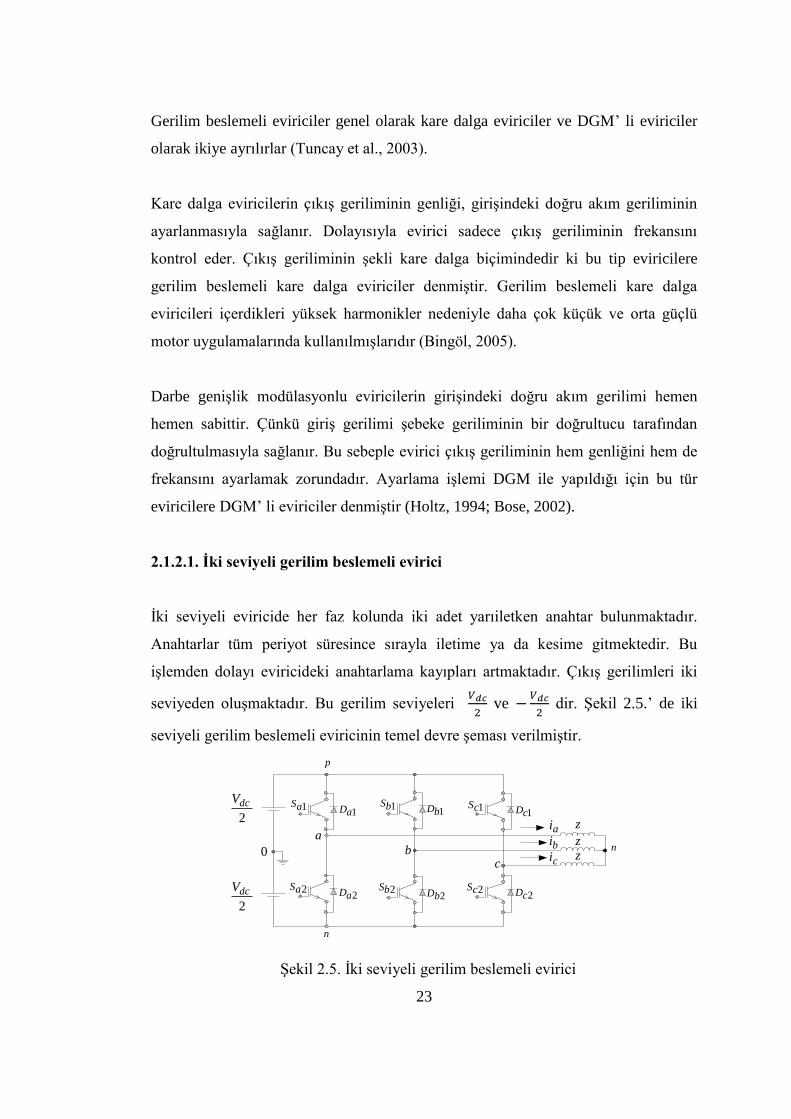
2.1.2.1. Ġki seviyeli gerilim beslemeli evirici
İki seviyeli eviricide her faz kolunda iki adet yarıiletken anahtar bulunmaktadır.
Anahtarlar tüm periyot süresince sırayla iletime ya da kesime gitmektedir. Bu
işlemden dolayı eviricideki anahtarlama kayıpları artmaktadır. Çıkış gerilimleri iki
seviyeden oluşmaktadır. Bu gerilim seviyeleri
ve
dir. Şekil 2.5.‟ de iki
seviyeli gerilim beslemeli eviricinin temel devre şeması verilmiştir.
bc
2
dcV
2
dcV
0
ai
bi
ci zz
p
n
z
n
1aS
a
1aD
2aD
1bD
2bD
1cD
2cD
1bS 1cS
2aS 2bS 2cS
5Şekil 2.5. İki seviyeli gerilim beslemeli evirici
24
2.1.2.2. Üç seviyeli gerilim beslemeli eviriciler
Çok seviyeli eviriciler orta ve yüksek gerilim beslemelerinde, motor sürücü
sistemlerinde, güç dağıtımında ve güç kalitesinin önemli olduğu yerlerde
kullanılırlar. Bu tip eviricilerin en belirgin avantajı, eviricinin anahtarlama frekansı
arttırılmadan çıkış dalga gerilimindeki harmonik bileşenlerinin daha az olmasıdır
(Nabae, 1981; Holtz, 1994). Çok seviyeli eviricilerdeki çıkış gerilim seviyeleri
kondansatör gerilim kaynağından elde edilir. Eviricinin çıkış gerilimindeki seviye
sayısı arttıkça, çıkış gerilimindeki harmonik bozumum azalır (Bingöl, 2005).
Yaygın olarak kullanılan çok seviyeli gerilim beslemeli eviriciler diyot tutmalı çok
seviyeli evirici, kondansatör tutmalı çok seviyeli evirici ve seri bağlı tam köprü çok
seviyeli eviricilerdir.
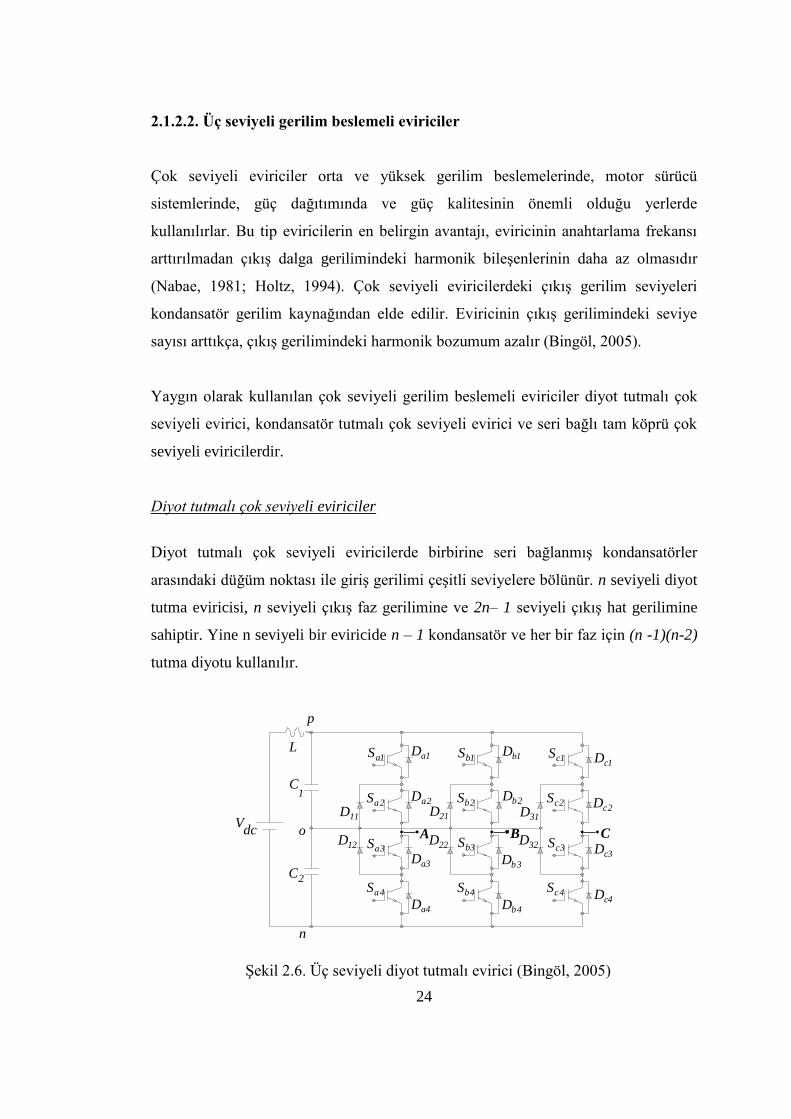
Diyot tutmalı çok seviyeli eviriciler
Diyot tutmalı çok seviyeli eviricilerde birbirine seri bağlanmış kondansatörler
arasındaki düğüm noktası ile giriş gerilimi çeşitli seviyelere bölünür. n seviyeli diyot
tutma eviricisi, n seviyeli çıkış faz gerilimine ve 2n– 1 seviyeli çıkış hat gerilimine
sahiptir. Yine n seviyeli bir eviricide n – 1 kondansatör ve her bir faz için (n -1)(n-2)
tutma diyotu kullanılır.
p
n
o
L
A B C
1aD
2aD
1bD
2bD
1cD
2cD
3aD
4aD
3bD
4bD
3cD
1C
2C
11D
21D
4cD
12D
22D
2aS
3aS
4aS
1aS
2bS
3bS
1bS
4bS
1cS
2cS
3cS
4cS
dcV
13D
23D
6Şekil 2.6. Üç seviyeli diyot tutmalı evirici (Bingöl, 2005)
25
Şekil 2.6.‟ da üç seviyeli diyot tutmalı eviricinin devre şeması gösterilmiştir. Şekilde
görüldüğü gibi, eviricinin her bir fazında iki tutma diyotu ( , ), dört anahtar
( ) ve dört bypass diyotu ( ) yer almaktadır.
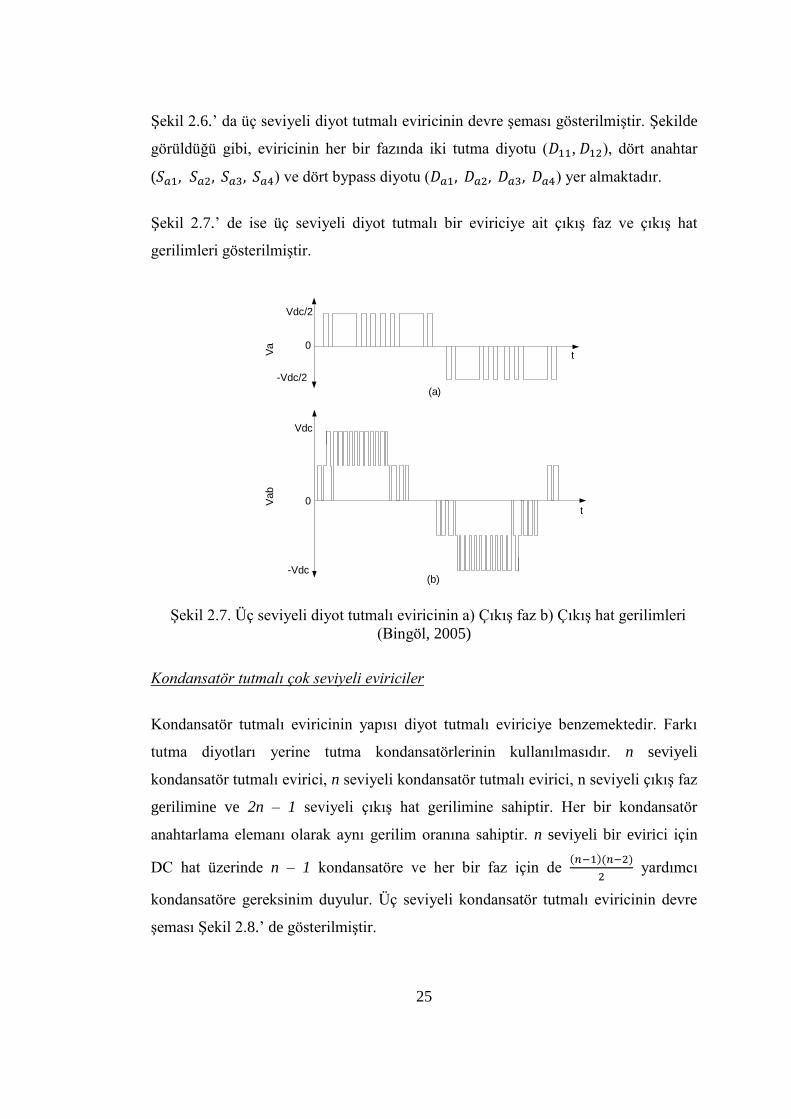
Şekil 2.7.‟ de ise üç seviyeli diyot tutmalı bir eviriciye ait çıkış faz ve çıkış hat
gerilimleri gösterilmiştir.
Vdc/2
-Vdc/2
(a)
Vdc
-Vdc
Vab
(b)
t
t
0
0
Va
7Şekil 2.7. Üç seviyeli diyot tutmalı eviricinin a) Çıkış faz b) Çıkış hat gerilimleri
(Bingöl, 2005)
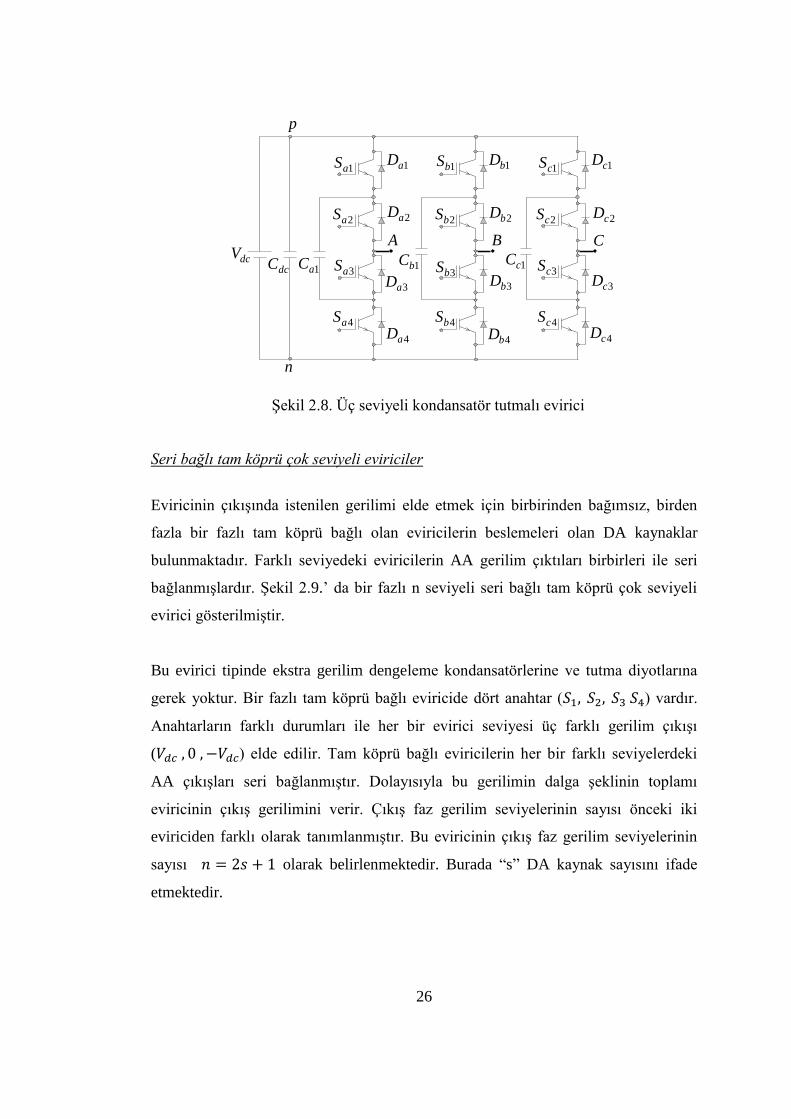
Kondansatör tutmalı çok seviyeli eviriciler
Kondansatör tutmalı eviricinin yapısı diyot tutmalı eviriciye benzemektedir. Farkı
tutma diyotları yerine tutma kondansatörlerinin kullanılmasıdır. n seviyeli
kondansatör tutmalı evirici, n seviyeli kondansatör tutmalı evirici, n seviyeli çıkış faz
gerilimine ve 2n – 1 seviyeli çıkış hat gerilimine sahiptir. Her bir kondansatör
anahtarlama elemanı olarak aynı gerilim oranına sahiptir. n seviyeli bir evirici için
DC hat üzerinde n – 1 kondansatöre ve her bir faz için de
yardımcı
kondansatöre gereksinim duyulur. Üç seviyeli kondansatör tutmalı eviricinin devre
şeması Şekil 2.8.‟ de gösterilmiştir.
26
p
n
1aS
2aS
3aS
4aS
1bS
2bS
3bS
4bS
1cS
2cS
3cS
4cS
A B CdcV
dcC 1aC 1bC 1cC
1aD
2aD
3aD
4aD 4bD
3bD
2bD
1bD
4cD
3cD
2cD
1cD
8Şekil 2.8. Üç seviyeli kondansatör tutmalı evirici
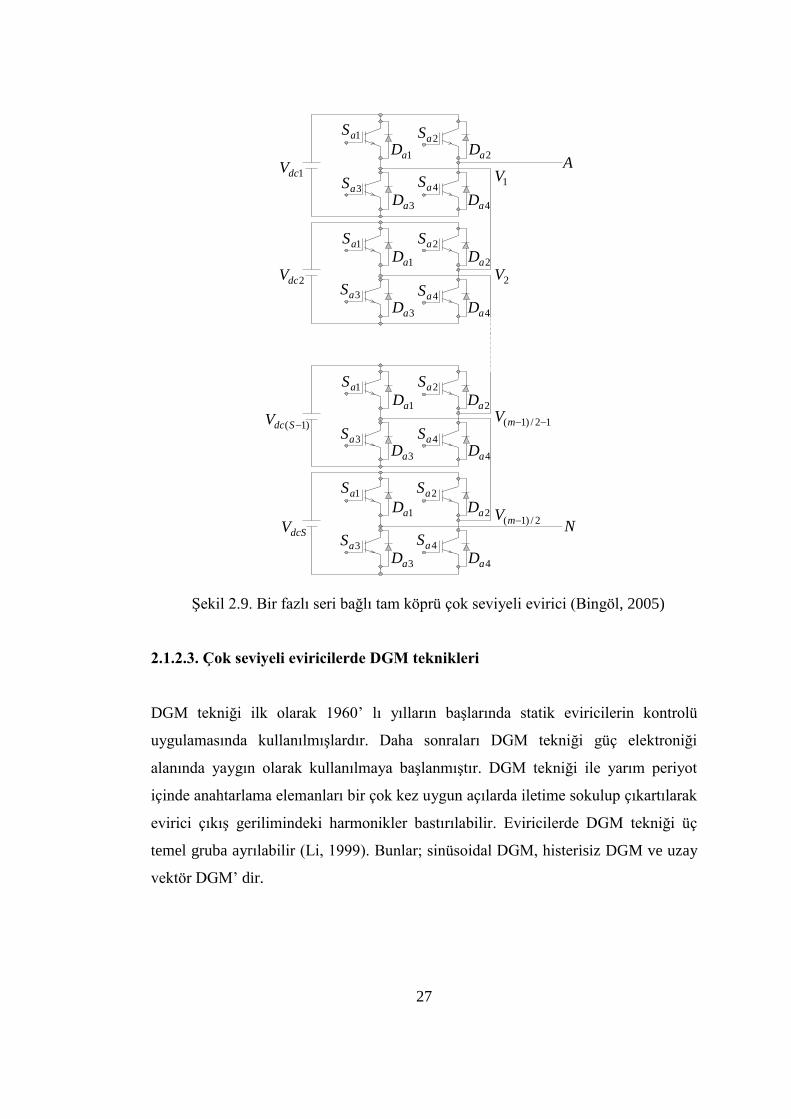
Seri bağlı tam köprü çok seviyeli eviriciler
Eviricinin çıkışında istenilen gerilimi elde etmek için birbirinden bağımsız, birden
fazla bir fazlı tam köprü bağlı olan eviricilerin beslemeleri olan DA kaynaklar
bulunmaktadır. Farklı seviyedeki eviricilerin AA gerilim çıktıları birbirleri ile seri
bağlanmışlardır. Şekil 2.9.‟ da bir fazlı n seviyeli seri bağlı tam köprü çok seviyeli
evirici gösterilmiştir.
Bu evirici tipinde ekstra gerilim dengeleme kondansatörlerine ve tutma diyotlarına
gerek yoktur. Bir fazlı tam köprü bağlı eviricide dört anahtar ( ) vardır.
Anahtarların farklı durumları ile her bir evirici seviyesi üç farklı gerilim çıkışı
( ) elde edilir. Tam köprü bağlı eviricilerin her bir farklı seviyelerdeki
AA çıkışları seri bağlanmıştır. Dolayısıyla bu gerilimin dalga şeklinin toplamı
eviricinin çıkış gerilimini verir. Çıkış faz gerilim seviyelerinin sayısı önceki iki
eviriciden farklı olarak tanımlanmıştır. Bu eviricinin çıkış faz gerilim seviyelerinin
sayısı olarak belirlenmektedir. Burada “s” DA kaynak sayısını ifade
etmektedir.
27
1aS2aS
3aS 4aS1dcV
1aS 2aS
3aS4aS
2dcV
1aS 2aS
3aS 4aS)1( SdcV
1aS 2aS
3aS 4aSdcSV
A
N
1V
2V
12/)1( mV
2/)1( mV
1aD 2aD
3aD 4aD
1aD
1aD
1aD
2aD
2aD
2aD
4aD
4aD
4aD
3aD
3aD
3aD
9Şekil 2.9. Bir fazlı seri bağlı tam köprü çok seviyeli evirici (Bingöl, 2005)
2.1.2.3. Çok seviyeli eviricilerde DGM teknikleri
DGM tekniği ilk olarak 1960‟ lı yılların başlarında statik eviricilerin kontrolü
uygulamasında kullanılmışlardır. Daha sonraları DGM tekniği güç elektroniği
alanında yaygın olarak kullanılmaya başlanmıştır. DGM tekniği ile yarım periyot
içinde anahtarlama elemanları bir çok kez uygun açılarda iletime sokulup çıkartılarak
evirici çıkış gerilimindeki harmonikler bastırılabilir. Eviricilerde DGM tekniği üç
temel gruba ayrılabilir (Li, 1999). Bunlar; sinüsoidal DGM, histerisiz DGM ve uzay
vektör DGM‟ dir.
28
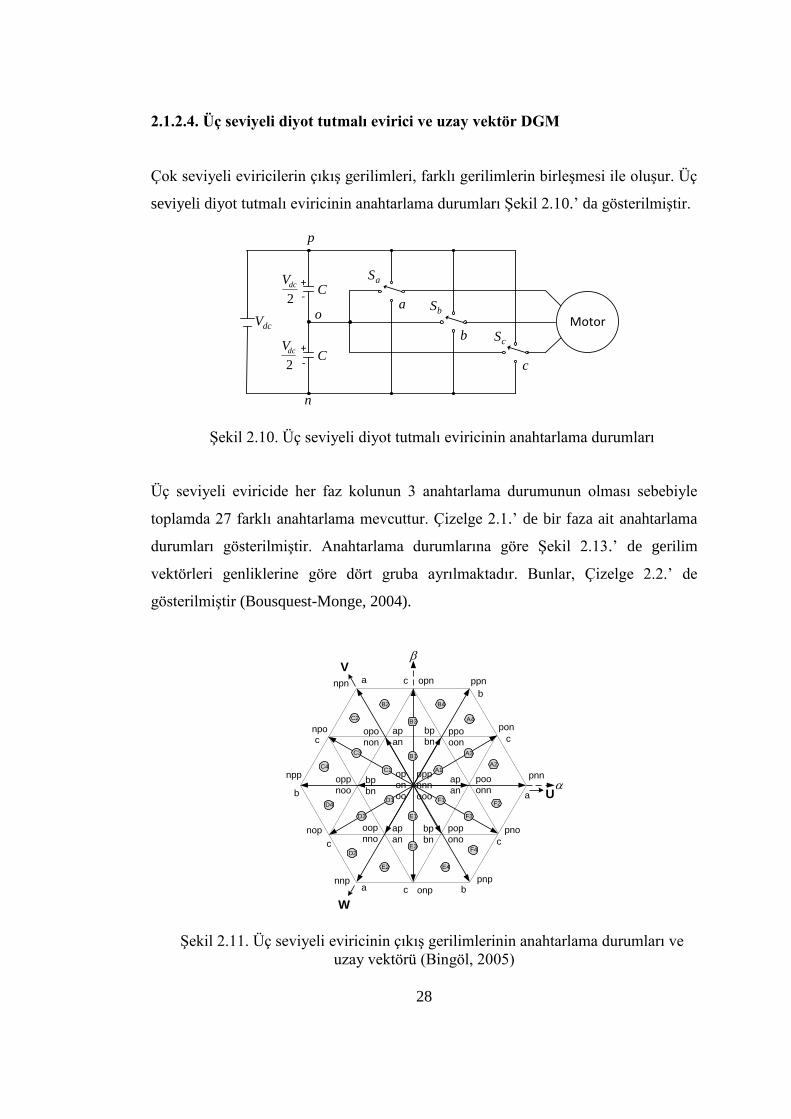
2.1.2.4. Üç seviyeli diyot tutmalı evirici ve uzay vektör DGM
Çok seviyeli eviricilerin çıkış gerilimleri, farklı gerilimlerin birleşmesi ile oluşur. Üç
seviyeli diyot tutmalı eviricinin anahtarlama durumları Şekil 2.10.‟ da gösterilmiştir.
dcV
C
C
2
dcV
2
dcV
+-
+
-
p
n
oa
b
c
aS
bS
cSMotor
10Şekil 2.10. Üç seviyeli diyot tutmalı eviricinin anahtarlama durumları
Üç seviyeli eviricide her faz kolunun 3 anahtarlama durumunun olması sebebiyle
toplamda 27 farklı anahtarlama mevcuttur. Çizelge 2.1.‟ de bir faza ait anahtarlama
durumları gösterilmiştir. Anahtarlama durumlarına göre Şekil 2.13.‟ de gerilim
vektörleri genliklerine göre dört gruba ayrılmaktadır. Bunlar, Çizelge 2.2.‟ de
gösterilmiştir (Bousquest-Monge, 2004).
pnn
pon
opn ppnnpn
npo
npp
nop
nnponp
pnp
pno
poo
onn
ppo
oon
opo
non
opp
noo
oop
nnopop
ono
U
V
W
A1A2
A3
A4
B4
B3
B2
B1
C2
C3
C4C1
D4D1
D3
D2
E2
E3
E1
E4
F2F1
F3
F4
a
a
a
b
b
b
bp
bn
bp
bn
bp
bn
ap
an
ap
an
ap
an
op
on
oo
c
c c
c c
c
ppp
nnn
ooo
11Şekil 2.11. Üç seviyeli eviricinin çıkış gerilimlerinin anahtarlama durumları ve
uzay vektörü (Bingöl, 2005)
29
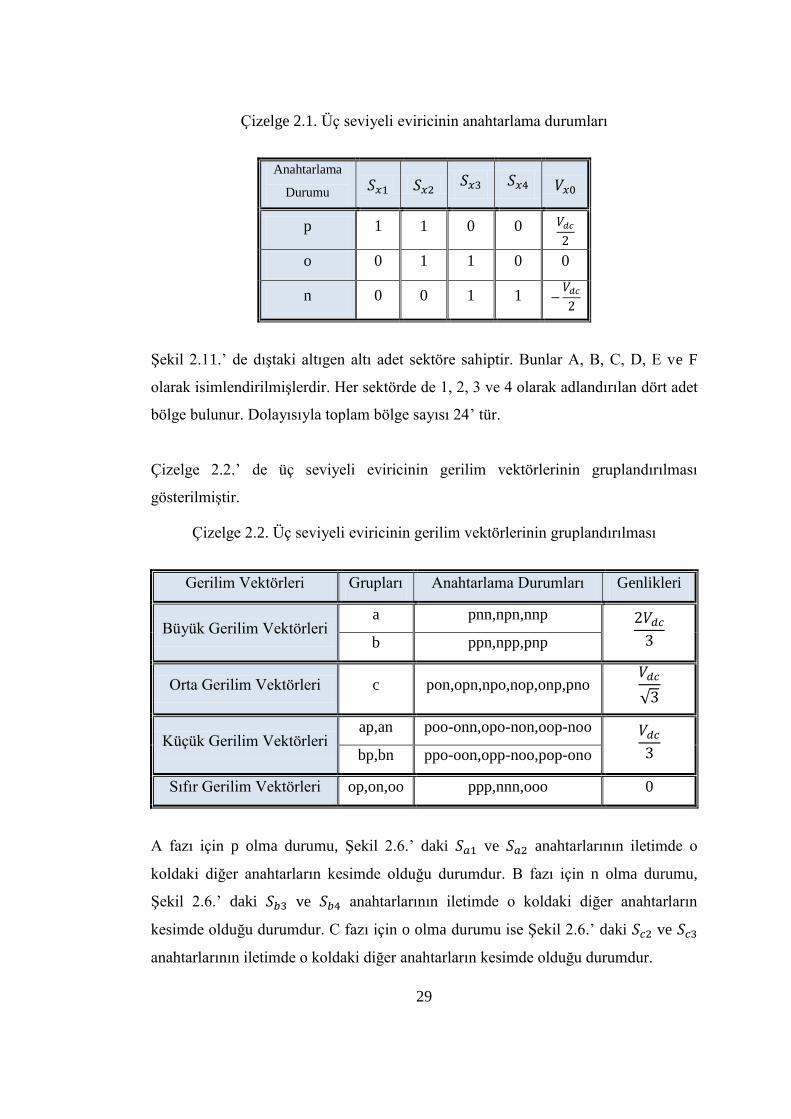
Çizelge 2.1. Üç seviyeli eviricinin anahtarlama durumları
Anahtarlama
Durumu
p 1 1 0 0
o 0 1 1 0 0
n 0 0 1 1
Şekil 2.11.‟ de dıştaki altıgen altı adet sektöre sahiptir. Bunlar A, B, C, D, E ve F
olarak isimlendirilmişlerdir. Her sektörde de 1, 2, 3 ve 4 olarak adlandırılan dört adet
bölge bulunur. Dolayısıyla toplam bölge sayısı 24‟ tür.
Çizelge 2.2.‟ de üç seviyeli eviricinin gerilim vektörlerinin gruplandırılması
gösterilmiştir.
Çizelge 2.2. Üç seviyeli eviricinin gerilim vektörlerinin gruplandırılması
Gerilim Vektörleri Grupları Anahtarlama Durumları Genlikleri
Büyük Gerilim Vektörleri a pnn,npn,nnp
b ppn,npp,pnp
Orta Gerilim Vektörleri c pon,opn,npo,nop,onp,pno
√
Küçük Gerilim Vektörleri ap,an poo-onn,opo-non,oop-noo
bp,bn ppo-oon,opp-noo,pop-ono
Sıfır Gerilim Vektörleri op,on,oo ppp,nnn,ooo 0
A fazı için p olma durumu, Şekil 2.6.‟ daki ve anahtarlarının iletimde o
koldaki diğer anahtarların kesimde olduğu durumdur. B fazı için n olma durumu,
Şekil 2.6.‟ daki ve anahtarlarının iletimde o koldaki diğer anahtarların
kesimde olduğu durumdur. C fazı için o olma durumu ise Şekil 2.6.‟ daki ve
anahtarlarının iletimde o koldaki diğer anahtarların kesimde olduğu durumdur.
30
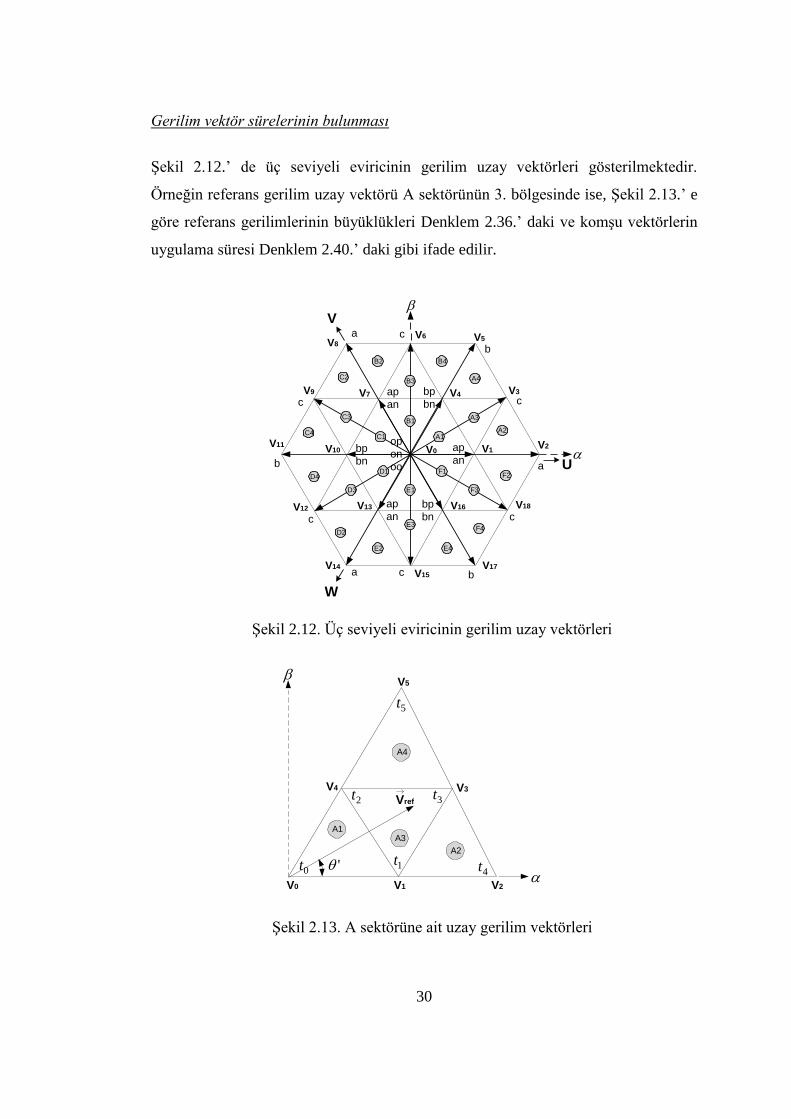
Gerilim vektör sürelerinin bulunması
Şekil 2.12.‟ de üç seviyeli eviricinin gerilim uzay vektörleri gösterilmektedir.
Örneğin referans gerilim uzay vektörü A sektörünün 3. bölgesinde ise, Şekil 2.13.‟ e
göre referans gerilimlerinin büyüklükleri Denklem 2.36.‟ daki ve komşu vektörlerin
uygulama süresi Denklem 2.40.‟ daki gibi ifade edilir.
V2
V3
V6 V5V8
V9
V11
V12
V14V15
V17
V18
V1
V4V7
V10
V13 V16
U
V
W
A1A2
A3
A4
B4
B3
B2
B1
C2
C3
C4C1
D4D1
D3
D2
E2
E3
E1
E4
F2F1
F3
F4
a
a
a
b
b
b
bp
bn
bp
bn
bp
bn
ap
an
ap
an
ap
an
op
on
oo
c
c c
c c
c
V0
12Şekil 2.12. Üç seviyeli eviricinin gerilim uzay vektörleri
V2
V3
V5
V4
V1
Vref
V0
'
A1
A2
A3
A4
0t 1t4t
3t
5t
2t
13Şekil 2.13. A sektörüne ait uzay gerilim vektörleri

31
√
(
)
√
(
)
√
√
A sektörünün 3. Bölgesindeki gerilim vektörlerinin genlikleri Denklem 2.36.‟ da
gösterilmiştir.
(2.36)
örnekleme zamanı içerisinde gerilim vektörlerinin zaman süreleri Denklem 2.37.‟
de gösterilmiştir.
(2.37)
Denklem 2.36., Denklem 2.37.‟ de yerine konulursa Denklem 2.38. elde edilir.
(2.38)
Denklem 2.38. gerçek ve sanal kısımlarına ayrıldığında Denklem 2.39. elde edilir.
(2.39)
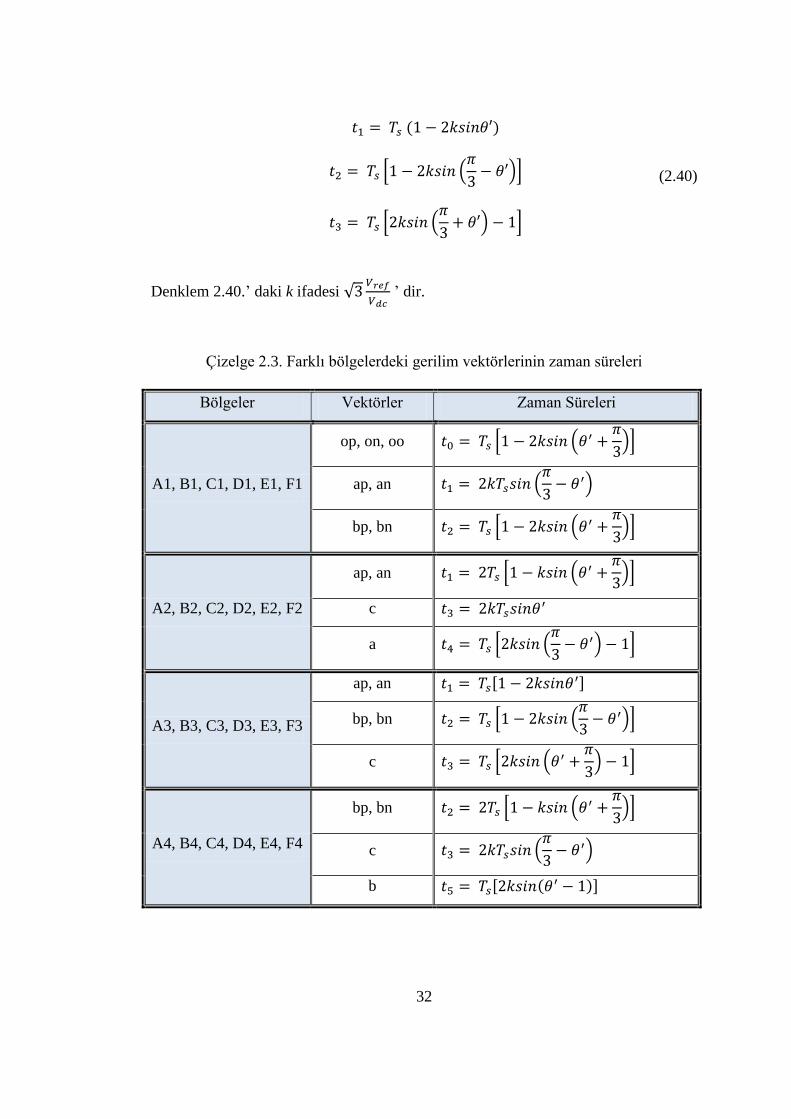
Gerilim vektörlerinin zaman süreleri Denklem 2.40.‟ da verilmiştir.
32
* (
)+
* (
) +
(2.40)
Denklem 2.40.‟ daki k ifadesi √
‟ dir.
Çizelge 2.3. Farklı bölgelerdeki gerilim vektörlerinin zaman süreleri
Bölgeler Vektörler Zaman Süreleri
A1, B1, C1, D1, E1, F1
op, on, oo * (
)+
ap, an (
)
bp, bn * (
)+
A2, B2, C2, D2, E2, F2
ap, an * (
)+
c
a * (
) +
A3, B3, C3, D3, E3, F3
ap, an [ ]
bp, bn * (
)+
c * (
) +
A4, B4, C4, D4, E4, F4
bp, bn * (
)+
c (
)
b [ ]
33
Her bir sektörün zaman süreleri Çizelge 2.3.‟ de özetlenerek verilmiştir. Burada
örnekleme periyodu, k modülasyon indeksi ve ise gerilim vektörüne en yakın
açı değeridir (Yamanaka et al., 2002).
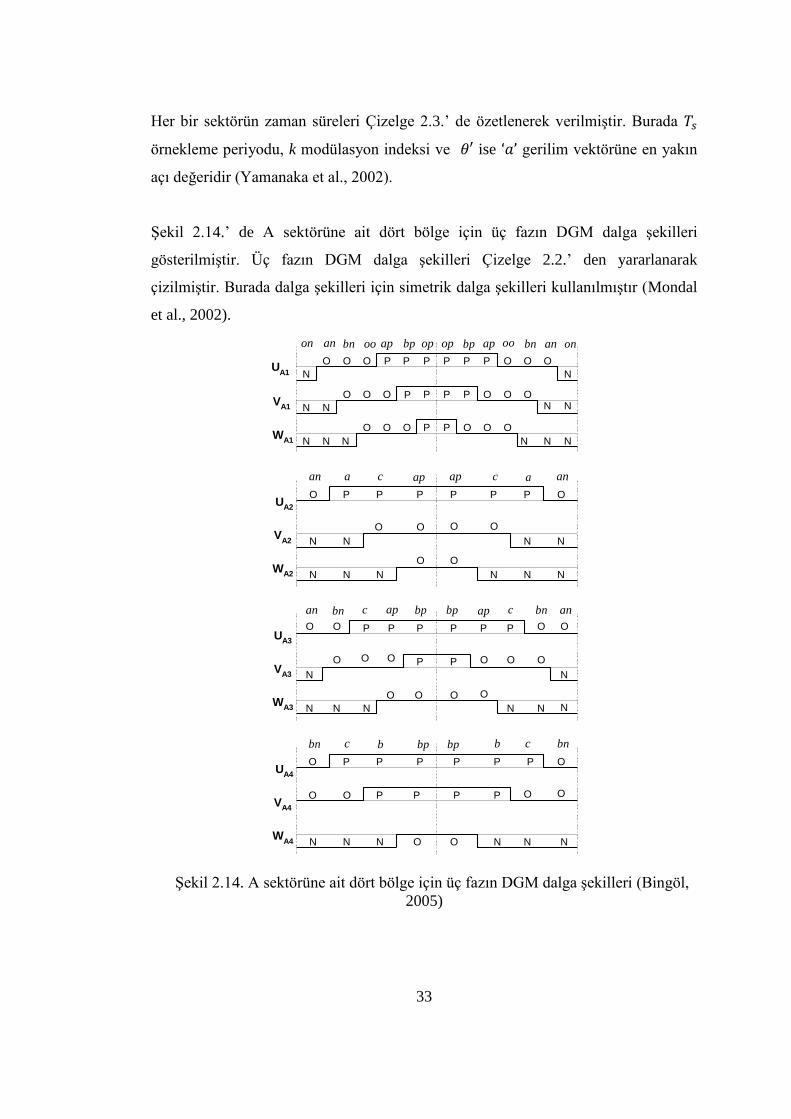
Şekil 2.14.‟ de A sektörüne ait dört bölge için üç fazın DGM dalga şekilleri
gösterilmiştir. Üç fazın DGM dalga şekilleri Çizelge 2.2.‟ den yararlanarak
çizilmiştir. Burada dalga şekilleri için simetrik dalga şekilleri kullanılmıştır (Mondal
et al., 2002).
UA1
VA1
WA1
UA2
UA3
UA4
VA2
VA3
VA4
WA2
WA3
WA4
on an bn oo ap bp op op bp ap oo bn an on
an a c ap ap c a an
an bn c ap bp bp ap c bn an
bn bnc cb bbp bp
NN
N N
N N N
NN
N N N
N N
NNN
N N
N N N
N
N N N
N
NNN
NNNN N N
O O O
O O O
OO O
O
O
O
O
OO
O O
O
O O O
O O
O
O O O O
O O
O
O O
OOO
OOOO
O
O O
O O
O
OO
P P
P
P
P
P
P
P
P
P
P
P
P P P P P P
P P P
P
P
P
P P
P P P
P P
P
P
P
P
P
14Şekil 2.14. A sektörüne ait dört bölge için üç fazın DGM dalga şekilleri (Bingöl,
2005)
34
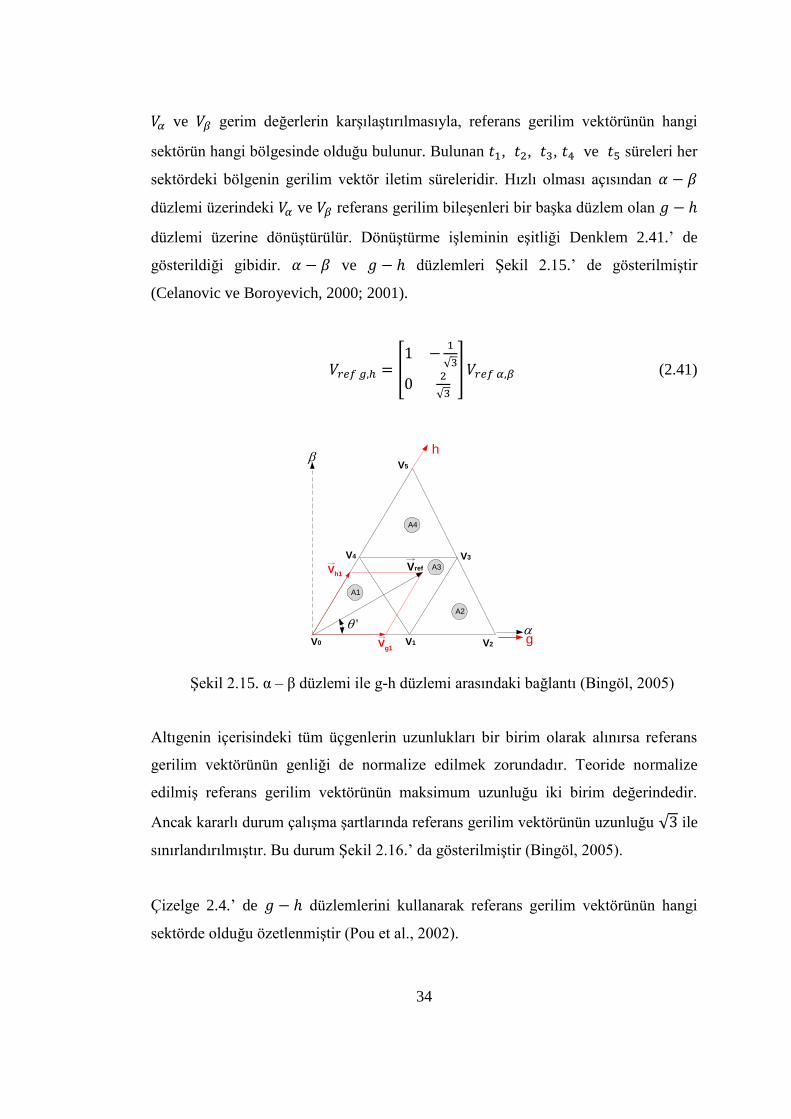
ve gerim değerlerin karşılaştırılmasıyla, referans gerilim vektörünün hangi
sektörün hangi bölgesinde olduğu bulunur. Bulunan , , , ve süreleri her
sektördeki bölgenin gerilim vektör iletim süreleridir. Hızlı olması açısından
düzlemi üzerindeki ve referans gerilim bileşenleri bir başka düzlem olan
düzlemi üzerine dönüştürülür. Dönüştürme işleminin eşitliği Denklem 2.41.‟ de
gösterildiği gibidir. ve düzlemleri Şekil 2.15.‟ de gösterilmiştir
(Celanovic ve Boroyevich, 2000; 2001).
[
√
√
] (2.41)
V5
V4 V3
V2V1V0
'
A4
A1
A3
A2
Vref
h
gVg1
Vh1
15Şekil 2.15. α – β düzlemi ile g-h düzlemi arasındaki bağlantı (Bingöl, 2005)
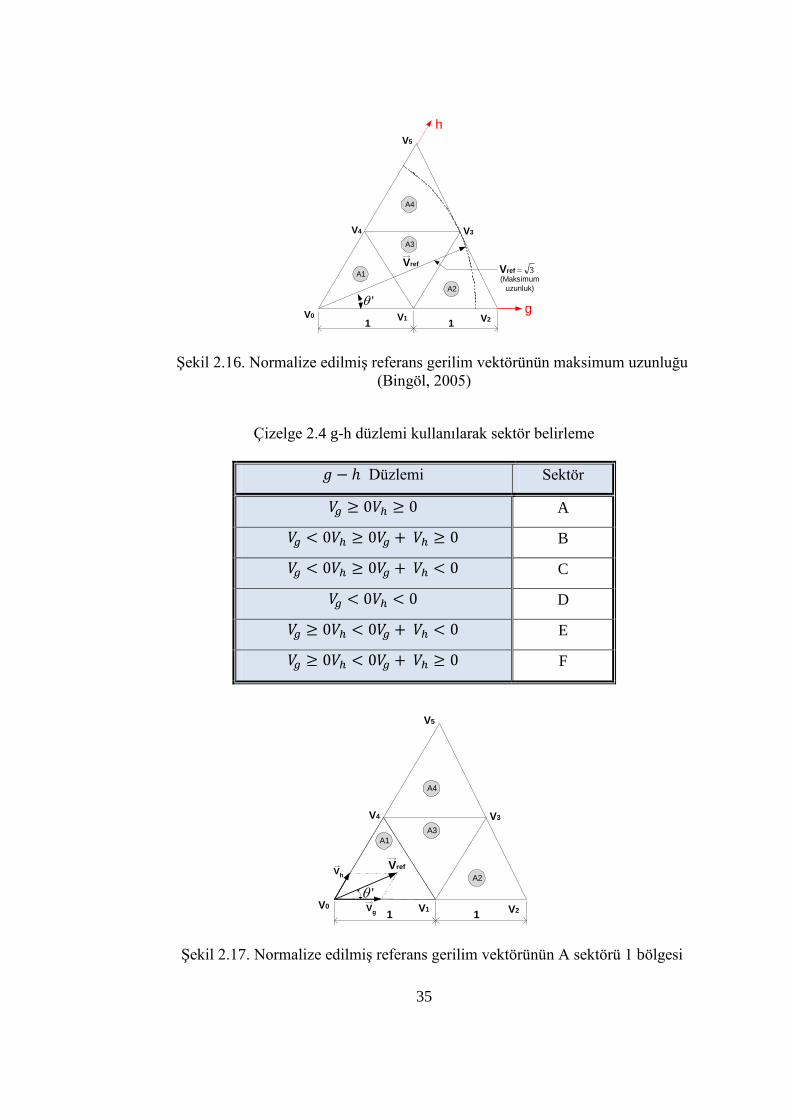
Altıgenin içerisindeki tüm üçgenlerin uzunlukları bir birim olarak alınırsa referans
gerilim vektörünün genliği de normalize edilmek zorundadır. Teoride normalize
edilmiş referans gerilim vektörünün maksimum uzunluğu iki birim değerindedir.
Ancak kararlı durum çalışma şartlarında referans gerilim vektörünün uzunluğu √ ile
sınırlandırılmıştır. Bu durum Şekil 2.16.‟ da gösterilmiştir (Bingöl, 2005).
Çizelge 2.4.‟ de düzlemlerini kullanarak referans gerilim vektörünün hangi
sektörde olduğu özetlenmiştir (Pou et al., 2002).
35
V5
V4 V3
V2V1V0
'
A4
A1
A3
A2
h
g
Vref
1 1
Vref 3(Maksimum
uzunluk)
16Şekil 2.16. Normalize edilmiş referans gerilim vektörünün maksimum uzunluğu
(Bingöl, 2005)
Çizelge 2.4 g-h düzlemi kullanılarak sektör belirleme
Düzlemi Sektör
A
B
C
D
E
F
V5
V4 V3
V2V1V0
'
A4
A1
A3
A2
Vref
1 1
Vh
Vg
17Şekil 2.17. Normalize edilmiş referans gerilim vektörünün A sektörü 1 bölgesi
36
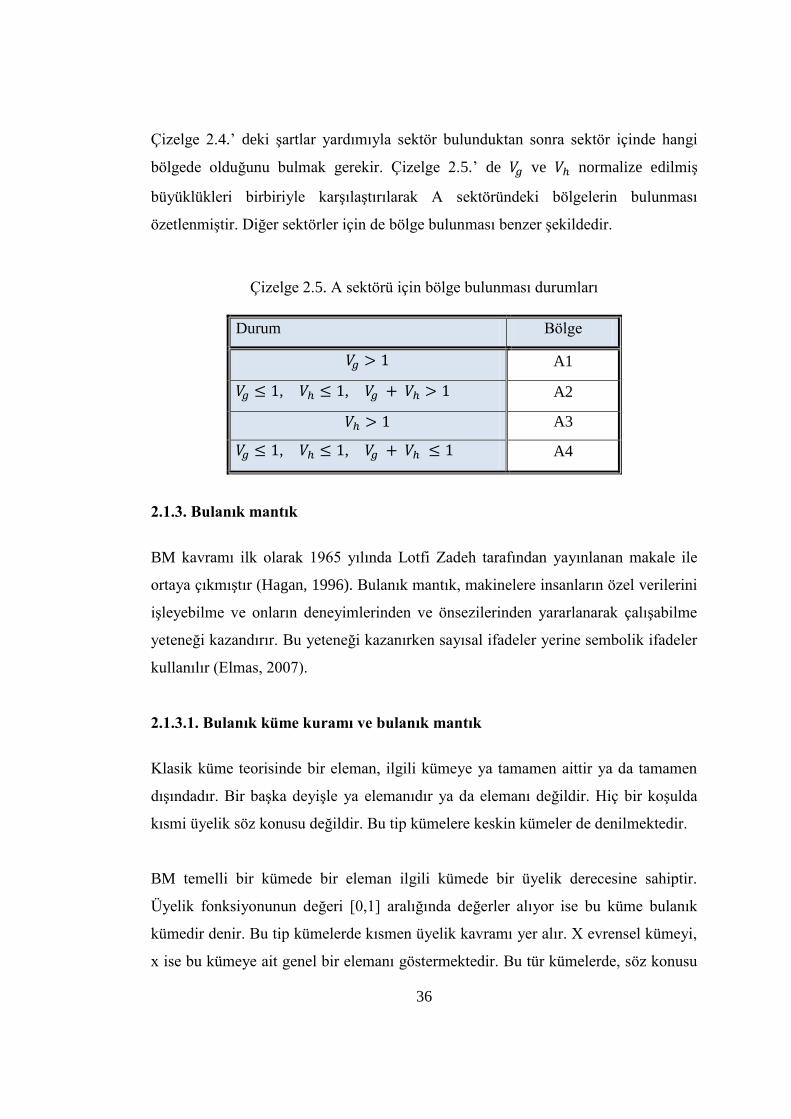
Çizelge 2.4.‟ deki şartlar yardımıyla sektör bulunduktan sonra sektör içinde hangi
bölgede olduğunu bulmak gerekir. Çizelge 2.5.‟ de ve normalize edilmiş
büyüklükleri birbiriyle karşılaştırılarak A sektöründeki bölgelerin bulunması
özetlenmiştir. Diğer sektörler için de bölge bulunması benzer şekildedir.
Çizelge 2.5. A sektörü için bölge bulunması durumları
Durum Bölge
A1
, , A2
A3
, , A4
2.1.3. Bulanık mantık
BM kavramı ilk olarak 1965 yılında Lotfi Zadeh tarafından yayınlanan makale ile
ortaya çıkmıştır (Hagan, 1996). Bulanık mantık, makinelere insanların özel verilerini
işleyebilme ve onların deneyimlerinden ve önsezilerinden yararlanarak çalışabilme
yeteneği kazandırır. Bu yeteneği kazanırken sayısal ifadeler yerine sembolik ifadeler
kullanılır (Elmas, 2007).
2.1.3.1. Bulanık küme kuramı ve bulanık mantık
Klasik küme teorisinde bir eleman, ilgili kümeye ya tamamen aittir ya da tamamen
dışındadır. Bir başka deyişle ya elemanıdır ya da elemanı değildir. Hiç bir koşulda
kısmi üyelik söz konusu değildir. Bu tip kümelere keskin kümeler de denilmektedir.
BM temelli bir kümede bir eleman ilgili kümede bir üyelik derecesine sahiptir.
Üyelik fonksiyonunun değeri [0,1] aralığında değerler alıyor ise bu küme bulanık
kümedir denir. Bu tip kümelerde kısmen üyelik kavramı yer alır. X evrensel kümeyi,
x ise bu kümeye ait genel bir elemanı göstermektedir. Bu tür kümelerde, söz konusu
37
evrenin elemanlarının bir A bulanık kümesine ait olma derecesini temsil etmek için
üyelik fonksiyonları belirlenir. X evrensel kümesi içerisinde A bulanık kümesinin
üyelik fonksiyonu ile gösterilir ve Denklem 2.42.‟ deki gibi ifade edilir.
[ ] (2.42)
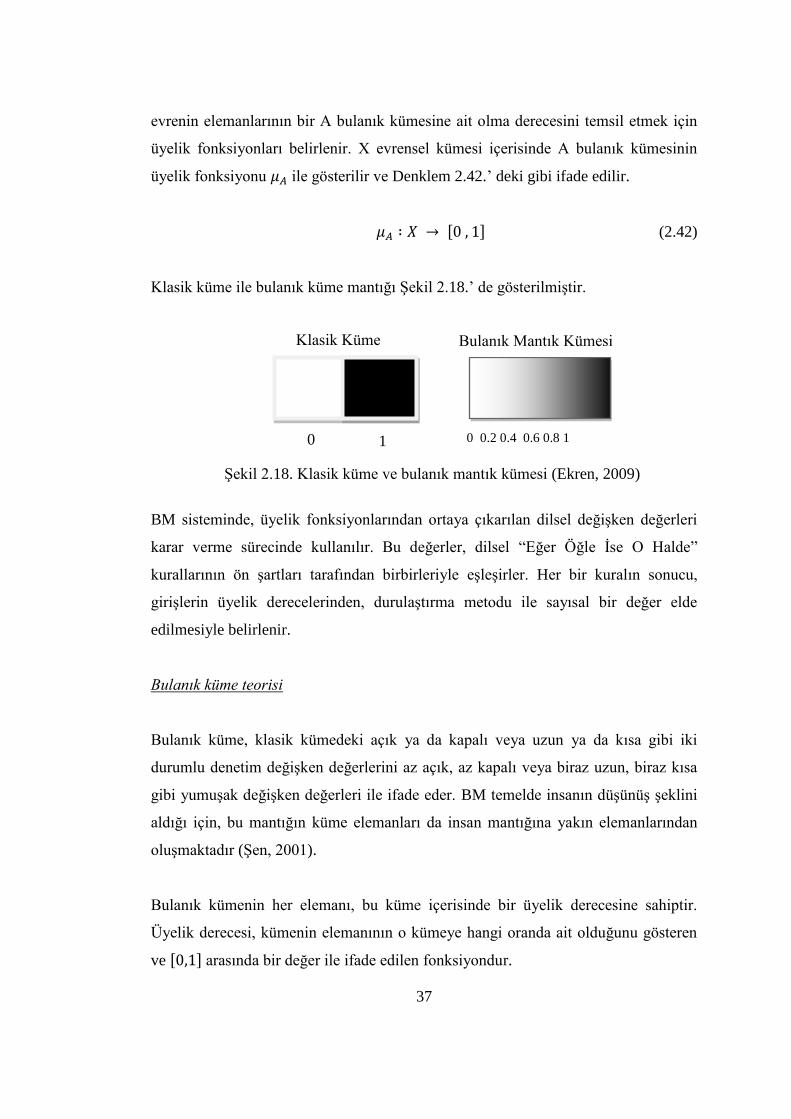
Klasik küme ile bulanık küme mantığı Şekil 2.18.‟ de gösterilmiştir.
BM sisteminde, üyelik fonksiyonlarından ortaya çıkarılan dilsel değişken değerleri
karar verme sürecinde kullanılır. Bu değerler, dilsel “Eğer Öğle İse O Halde”
kurallarının ön şartları tarafından birbirleriyle eşleşirler. Her bir kuralın sonucu,
girişlerin üyelik derecelerinden, durulaştırma metodu ile sayısal bir değer elde
edilmesiyle belirlenir.
Bulanık küme teorisi
Bulanık küme, klasik kümedeki açık ya da kapalı veya uzun ya da kısa gibi iki
durumlu denetim değişken değerlerini az açık, az kapalı veya biraz uzun, biraz kısa
gibi yumuşak değişken değerleri ile ifade eder. BM temelde insanın düşünüş şeklini
aldığı için, bu mantığın küme elemanları da insan mantığına yakın elemanlarından
oluşmaktadır (Şen, 2001).
Bulanık kümenin her elemanı, bu küme içerisinde bir üyelik derecesine sahiptir.
Üyelik derecesi, kümenin elemanının o kümeye hangi oranda ait olduğunu gösteren
ve [ ] arasında bir değer ile ifade edilen fonksiyondur.
Klasik Küme Bulanık Mantık Kümesi
18Şekil 2.18. Klasik küme ve bulanık mantık kümesi (Ekren, 2009)
0 1 0 0.2 0.4 0.6 0.8 1
38
2.1.3.2. Üyelik fonksiyonları
Üyelik fonksiyonu, giriş ve çıkış değerlerinin dilsel olarak tanımlanmasını sağlar.
Ayrıca üyelik fonksiyonu, giriş ve çıkış değerlerini 0 ile 1 arasında tanımlayan
geometrik bir ifadedir. X evrensel kümesindeki A bulanık kümesi sıralı çiftler kümesi
şeklinde gösterilir. Bu durum Denklem 2.43.‟ de gösterilmiştir. Buradaki
üyelik fonksiyonunu ifade etmektedir.
{( )| (2.43)
En sık kullanılan dört üyelik fonksiyonu vardır. Bunlar; üçgen üyelik fonksiyonu,
trapezoidal üyelik fonksiyonu, sigmoid üyelik fonksiyonu ve gaussian üyelik
fonksiyonu‟ dur.
Üçgen üyelik fonksiyonu
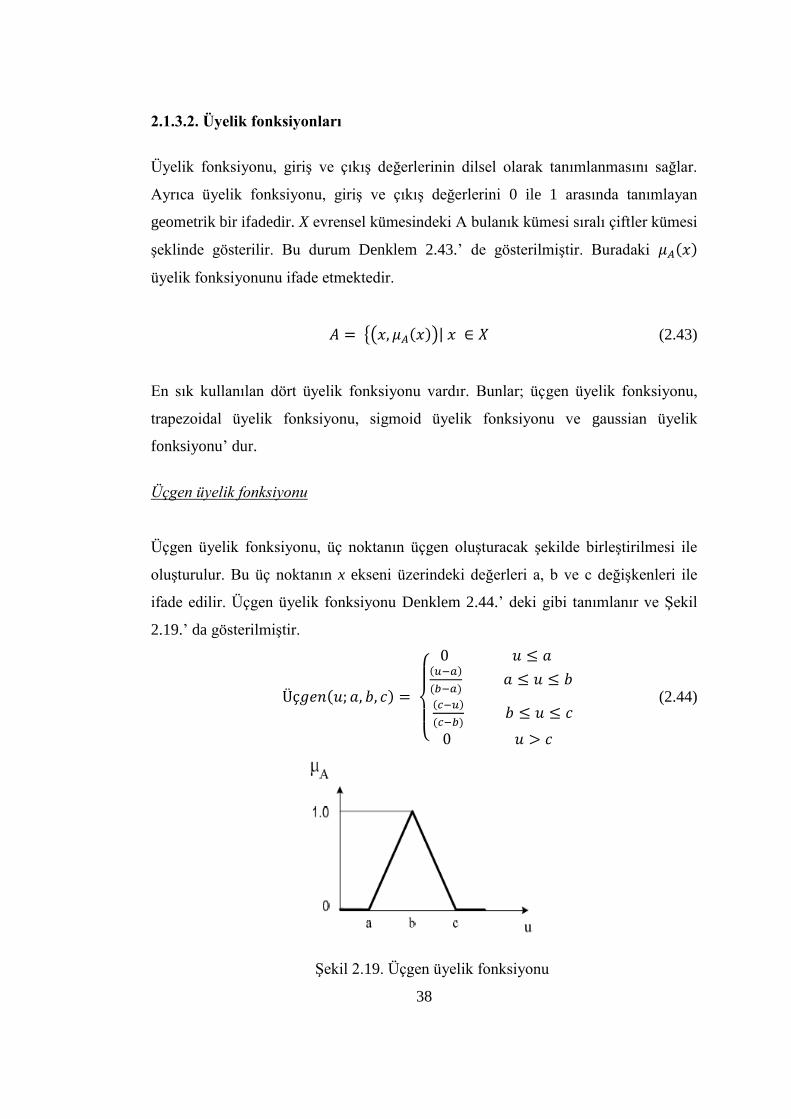
Üçgen üyelik fonksiyonu, üç noktanın üçgen oluşturacak şekilde birleştirilmesi ile
oluşturulur. Bu üç noktanın x ekseni üzerindeki değerleri a, b ve c değişkenleri ile
ifade edilir. Üçgen üyelik fonksiyonu Denklem 2.44.‟ deki gibi tanımlanır ve Şekil
2.19.‟ da gösterilmiştir.
{
(2.44)
19Şekil 2.19. Üçgen üyelik fonksiyonu

39
Trapezoidal üyelik fonksiyonu
Trapezoidal üyelik fonksiyonuna yamuk üyelik fonksiyonu da denmektedir.
Trapezoidal üyelik fonksiyonu, dört noktadan oluşur. Bu dört noktanın x ekseni
üzerindeki değerleri a, b, c ve d değişkenleri ile ifade edilir. Trapezoidal üyelik
fonksiyonu Denklem 2.45.‟ deki gibi tanımlanır ve Şekil 2.20.‟ de gösterilmiştir.
{
(2.45)
20Şekil 2.20. Trapezoidal üyelik fonksiyonu
Sigmoid üyelik fonksiyonu
Sigmoid üyelik fonksiyonu, üç noktadan oluşur. Bu üç noktanın x ekseni üzerindeki
değerleri a, b ve c değişkenleri ile ifade edilir. Sigmoid üyelik fonksiyonu Denklem
2.46.‟ daki gibi tanımlanır ve Şekil 2.21.‟ de gösterilmiştir.
{
*
+
*
+
(2.46)
40
21Şekil 2.21. Sigmoid üyelik fonksiyonu
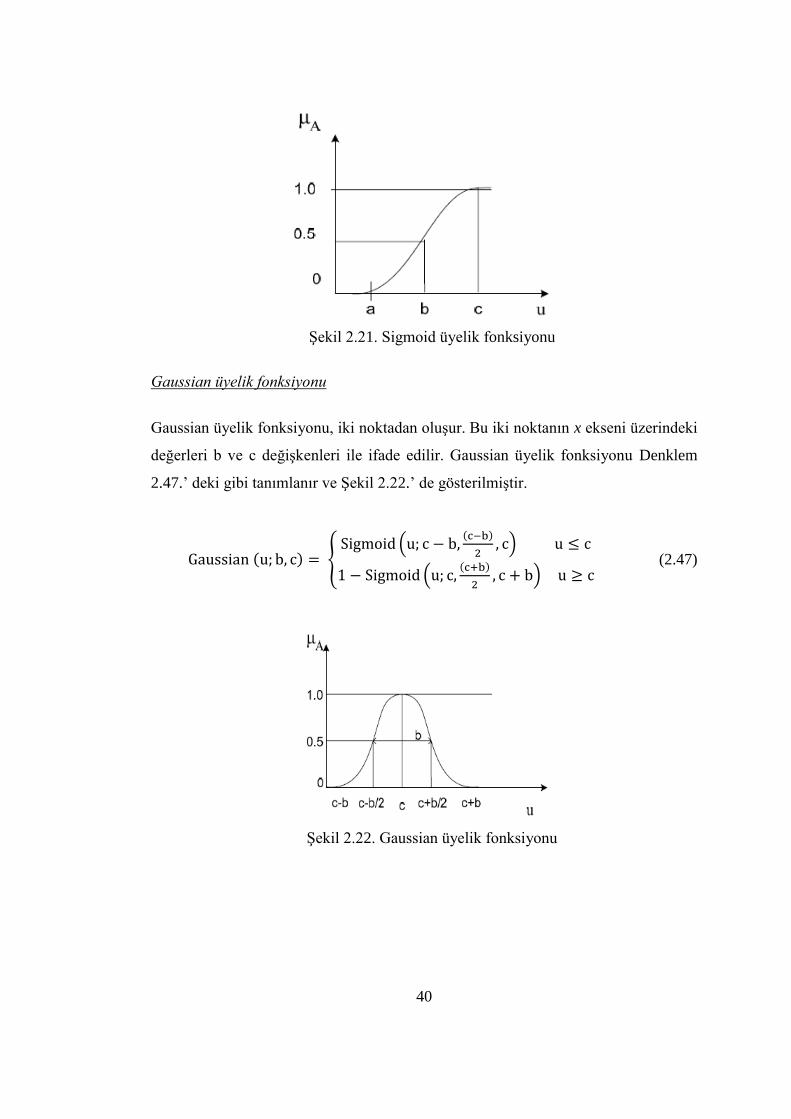
Gaussian üyelik fonksiyonu
Gaussian üyelik fonksiyonu, iki noktadan oluşur. Bu iki noktanın x ekseni üzerindeki
değerleri b ve c değişkenleri ile ifade edilir. Gaussian üyelik fonksiyonu Denklem
2.47.‟ deki gibi tanımlanır ve Şekil 2.22.‟ de gösterilmiştir.
{ (
)
(
)
(2.47)
22Şekil 2.22. Gaussian üyelik fonksiyonu
41
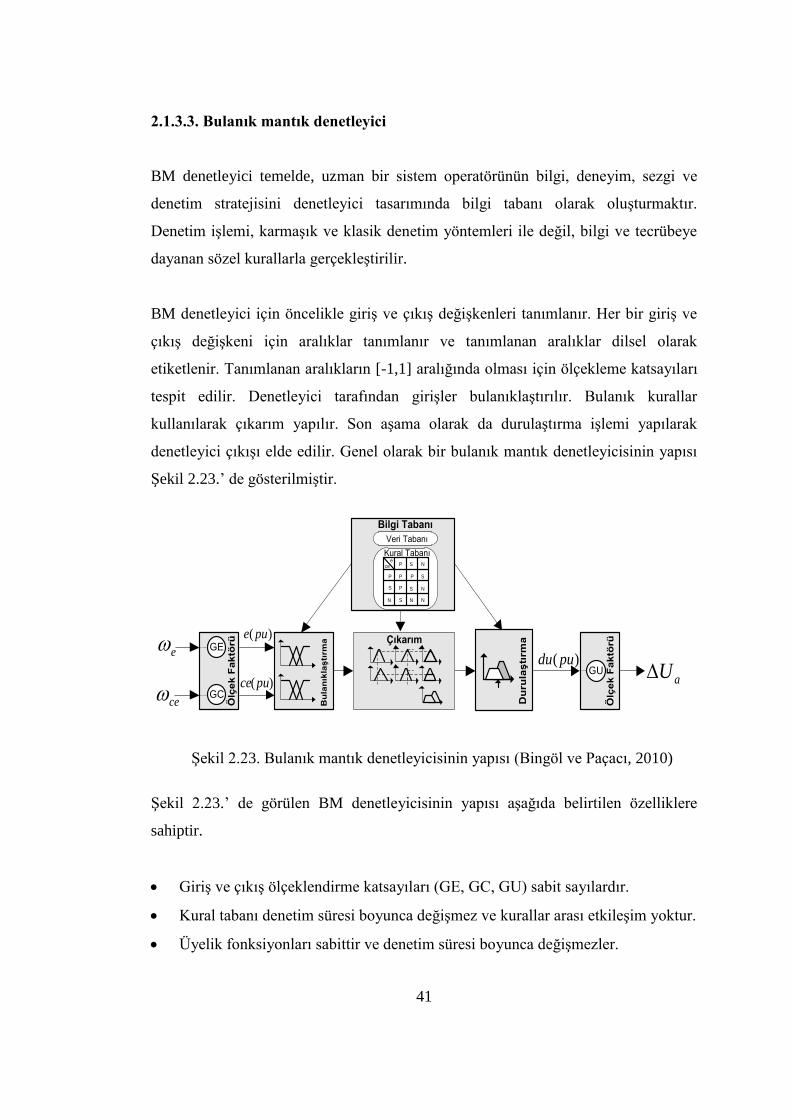
2.1.3.3. Bulanık mantık denetleyici
BM denetleyici temelde, uzman bir sistem operatörünün bilgi, deneyim, sezgi ve
denetim stratejisini denetleyici tasarımında bilgi tabanı olarak oluşturmaktır.
Denetim işlemi, karmaşık ve klasik denetim yöntemleri ile değil, bilgi ve tecrübeye
dayanan sözel kurallarla gerçekleştirilir.
BM denetleyici için öncelikle giriş ve çıkış değişkenleri tanımlanır. Her bir giriş ve
çıkış değişkeni için aralıklar tanımlanır ve tanımlanan aralıklar dilsel olarak
etiketlenir. Tanımlanan aralıkların [-1,1] aralığında olması için ölçekleme katsayıları
tespit edilir. Denetleyici tarafından girişler bulanıklaştırılır. Bulanık kurallar
kullanılarak çıkarım yapılır. Son aşama olarak da durulaştırma işlemi yapılarak
denetleyici çıkışı elde edilir. Genel olarak bir bulanık mantık denetleyicisinin yapısı
Şekil 2.23.‟ de gösterilmiştir.
Kural Tabanı
Veri Tabanı
Bilgi Tabanı
Çıkarım
P S N
N
S
P
S
S
S
P P
P N
N N
ece
Bu
lan
ıkla
ştı
rma
e
ce
Ölç
ek
Fa
ktö
rü
GC
GE)( pue
)(puce
Du
rula
ştı
rma
aU)( pudu
Ölç
ek
Fa
ktö
rü
GU
23Şekil 2.23. Bulanık mantık denetleyicisinin yapısı (Bingöl ve Paçacı, 2010)
Şekil 2.23.‟ de görülen BM denetleyicisinin yapısı aşağıda belirtilen özelliklere
sahiptir.
Giriş ve çıkış ölçeklendirme katsayıları (GE, GC, GU) sabit sayılardır.
Kural tabanı denetim süresi boyunca değişmez ve kurallar arası etkileşim yoktur.
Üyelik fonksiyonları sabittir ve denetim süresi boyunca değişmezler.
42
Kuralların sayısı giriş değişkenleri için tanımlanan üyelik fonksiyonlarının
sayısına bağlıdır.
Durulama ve kuralların sonuçlarını hesaplama yöntemi sabittir.
BM denetleyiciler, bulanıklaştırıcı, bilgi tabanı (kural ve veri tabanı), çıkarım ünitesi
ve durulaştırıcıdan oluşmaktadır.
Bulanıklaştırma
Bulanıklaştırma, kontrol edilen sistemden alınan denetlenecek sinyallerin bulanık
kümeye çevrilme işlemidir. Üyelik fonksiyonlarından faydalanarak giriş bilgilerinin
ait olduğu bulanık küme ve o küme deki üyelik dereceleri bulunur. Üyelik
fonksiyonlarının oluşturulmasında özel bir kural yoktur. Seçilecek her bir üyelik
fonksiyonunun tipi aynı ya da farklı olabilir. Üyelik fonksiyonlarının tipinin seçimi
tamamen tasarımcının isteğine ve tecrübesine bağlıdır.
Çıkarım
Çıkarım adımı BM denetleyicisinin önemli adımlarından biridir. Bu kısım insanın
çıkarım yapma ve karar verme yeteneğinden esinlenildiği kısımdır. Bulanıklaştırma
adımında elde edilen üyelik fonksiyonları ile kural tabanında hangi kuralların
kullanılacağı bulunur ve çıkarım işlemi yapılır. Çıkarım işleminde yaygın olarak 4
farklı çıkarım tekniği kullanılır. Bunlar; Max-Dot, Min-Max, Tsukamoto ve Takagi-
Sugeno çıkarım teknikleridir.
Max-Dot çıkarım
Her bir giriş değeri, ait olduğu üyelik fonksiyonundaki üyelik derecesine bağlı olarak
ilgili bulanık kümeyi yeniden ölçeklendirir. Çıkış değeri, ölçeklenmiş bu kümeler
içerisindeki maksimum değer alınarak bulunur. Şekil 2.24.‟ de Max-Dot çıkarım
tekniğine ait üyelik fonksiyon grafikleri verilmiştir (Elmas, 2007).
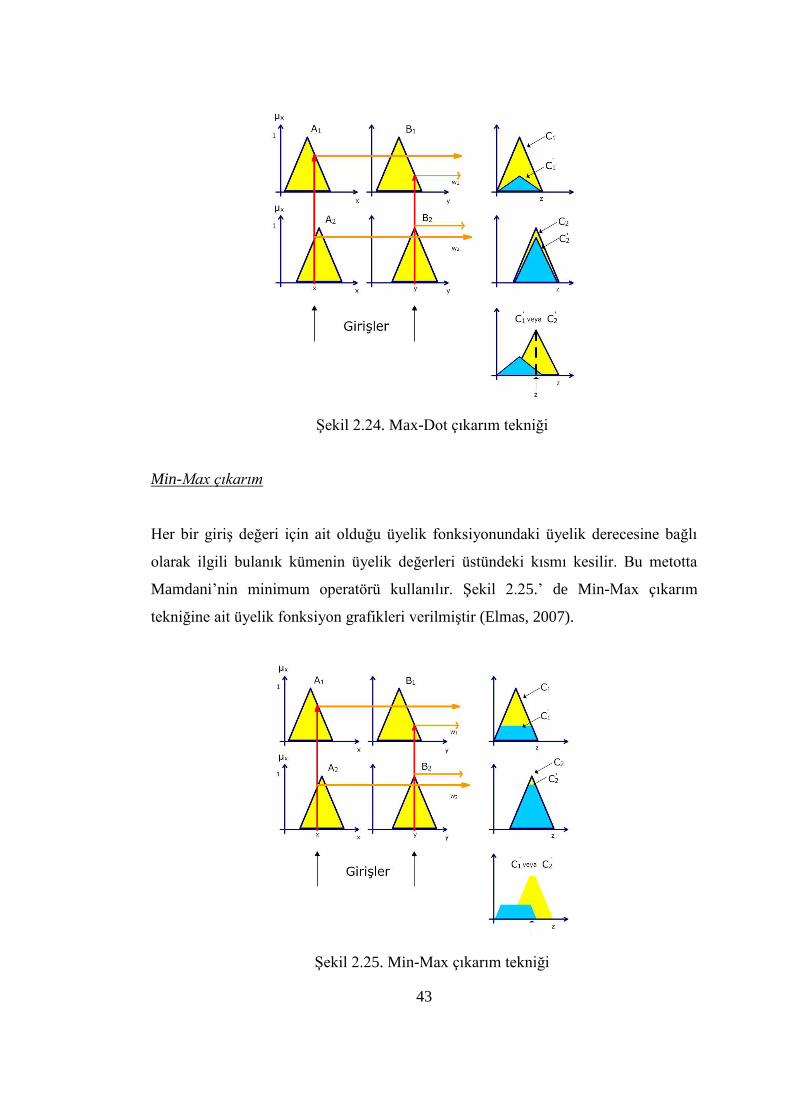
43
24Şekil 2.24. Max-Dot çıkarım tekniği
Min-Max çıkarım
Her bir giriş değeri için ait olduğu üyelik fonksiyonundaki üyelik derecesine bağlı
olarak ilgili bulanık kümenin üyelik değerleri üstündeki kısmı kesilir. Bu metotta
Mamdani‟nin minimum operatörü kullanılır. Şekil 2.25.‟ de Min-Max çıkarım
tekniğine ait üyelik fonksiyon grafikleri verilmiştir (Elmas, 2007).
25Şekil 2.25. Min-Max çıkarım tekniği
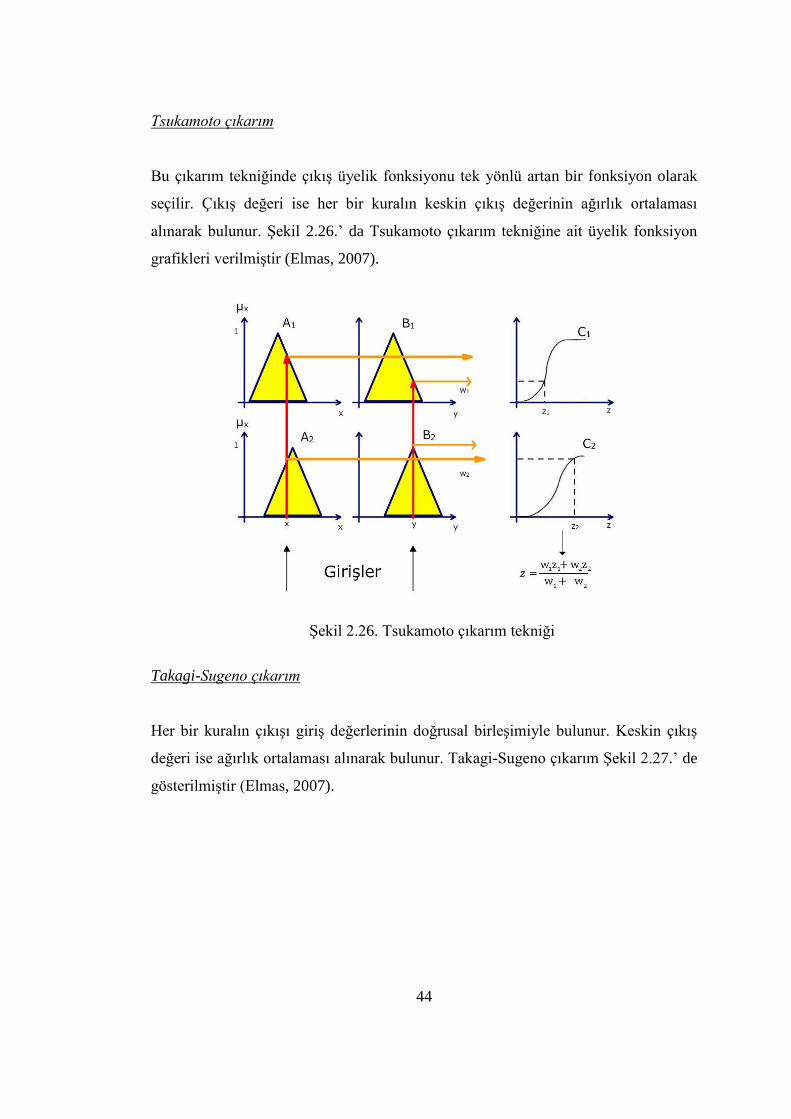
44
Tsukamoto çıkarım
Bu çıkarım tekniğinde çıkış üyelik fonksiyonu tek yönlü artan bir fonksiyon olarak
seçilir. Çıkış değeri ise her bir kuralın keskin çıkış değerinin ağırlık ortalaması
alınarak bulunur. Şekil 2.26.‟ da Tsukamoto çıkarım tekniğine ait üyelik fonksiyon
grafikleri verilmiştir (Elmas, 2007).
26Şekil 2.26. Tsukamoto çıkarım tekniği
Takagi-Sugeno çıkarım
Her bir kuralın çıkışı giriş değerlerinin doğrusal birleşimiyle bulunur. Keskin çıkış
değeri ise ağırlık ortalaması alınarak bulunur. Takagi-Sugeno çıkarım Şekil 2.27.‟ de
gösterilmiştir (Elmas, 2007).
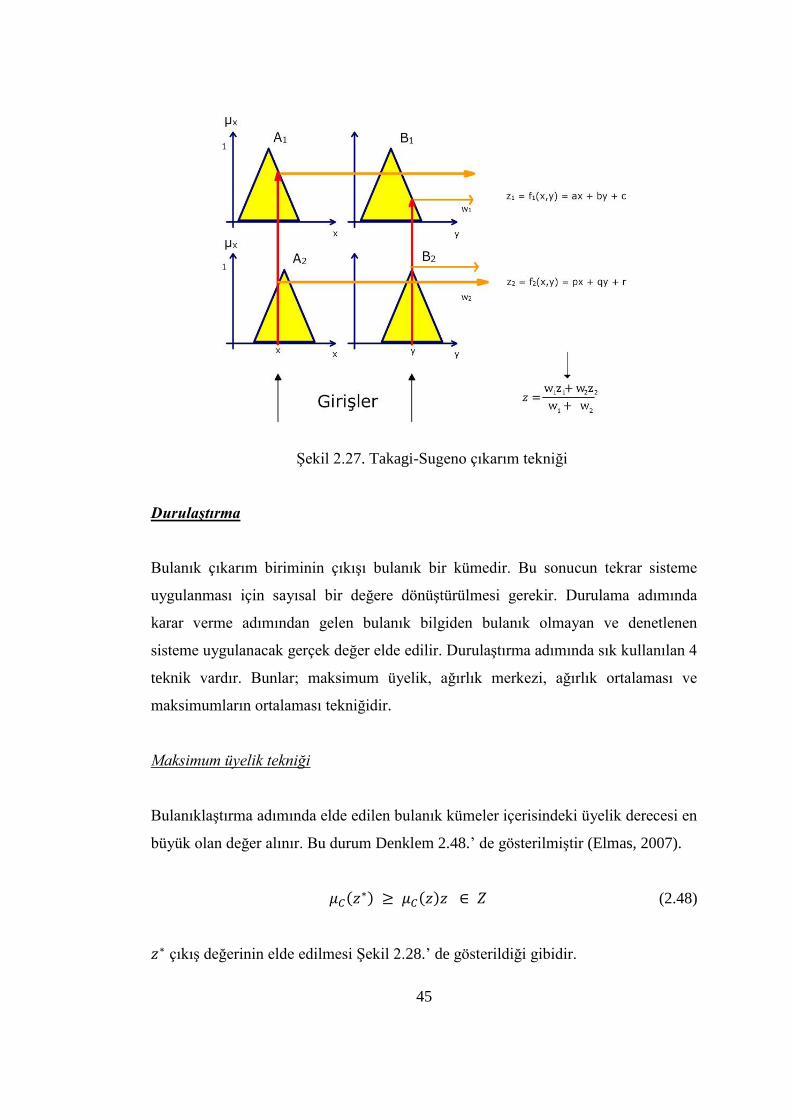
45
27Şekil 2.27. Takagi-Sugeno çıkarım tekniği
Durulaştırma
Bulanık çıkarım biriminin çıkışı bulanık bir kümedir. Bu sonucun tekrar sisteme
uygulanması için sayısal bir değere dönüştürülmesi gerekir. Durulama adımında
karar verme adımından gelen bulanık bilgiden bulanık olmayan ve denetlenen
sisteme uygulanacak gerçek değer elde edilir. Durulaştırma adımında sık kullanılan 4
teknik vardır. Bunlar; maksimum üyelik, ağırlık merkezi, ağırlık ortalaması ve
maksimumların ortalaması tekniğidir.
Maksimum üyelik tekniği
Bulanıklaştırma adımında elde edilen bulanık kümeler içerisindeki üyelik derecesi en
büyük olan değer alınır. Bu durum Denklem 2.48.‟ de gösterilmiştir (Elmas, 2007).
(2.48)
çıkış değerinin elde edilmesi Şekil 2.28.‟ de gösterildiği gibidir.
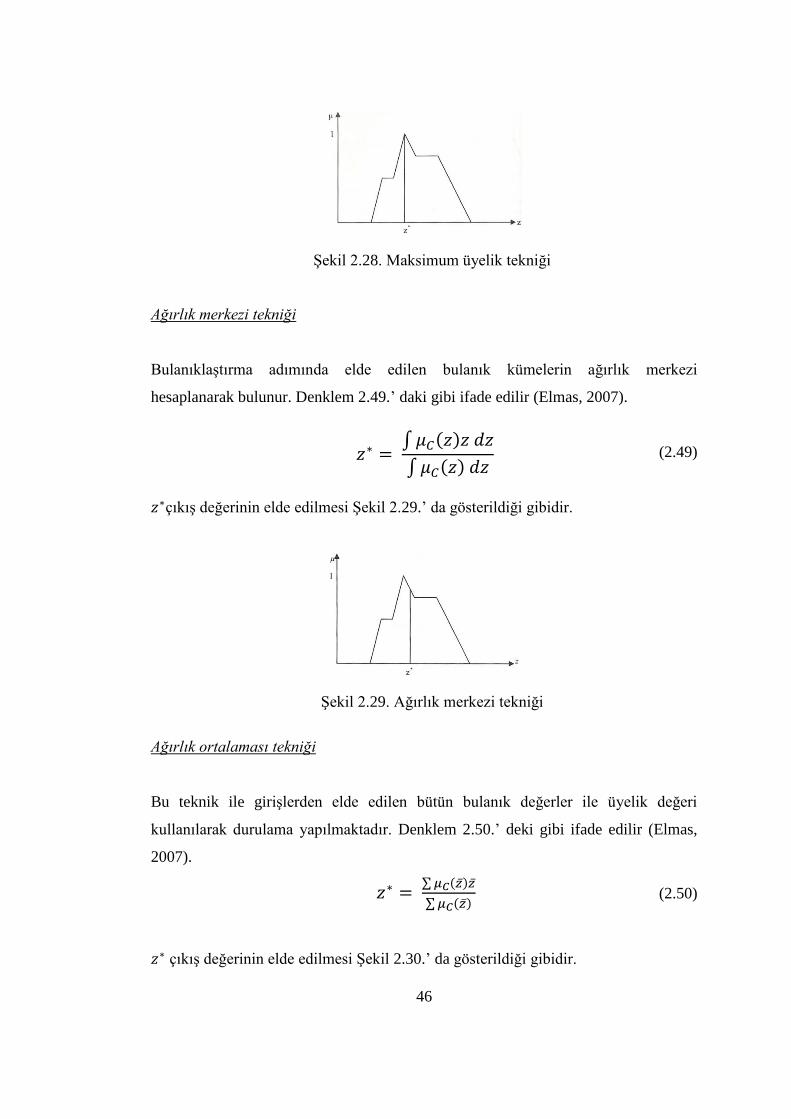
46
∫
∫
28Şekil 2.28. Maksimum üyelik tekniği
Ağırlık merkezi tekniği
Bulanıklaştırma adımında elde edilen bulanık kümelerin ağırlık merkezi
hesaplanarak bulunur. Denklem 2.49.‟ daki gibi ifade edilir (Elmas, 2007).
(2.49)
çıkış değerinin elde edilmesi Şekil 2.29.‟ da gösterildiği gibidir.
29Şekil 2.29. Ağırlık merkezi tekniği
Ağırlık ortalaması tekniği
Bu teknik ile girişlerden elde edilen bütün bulanık değerler ile üyelik değeri
kullanılarak durulama yapılmaktadır. Denklem 2.50.‟ deki gibi ifade edilir (Elmas,
2007).
∑
∑ (2.50)
çıkış değerinin elde edilmesi Şekil 2.30.‟ da gösterildiği gibidir.
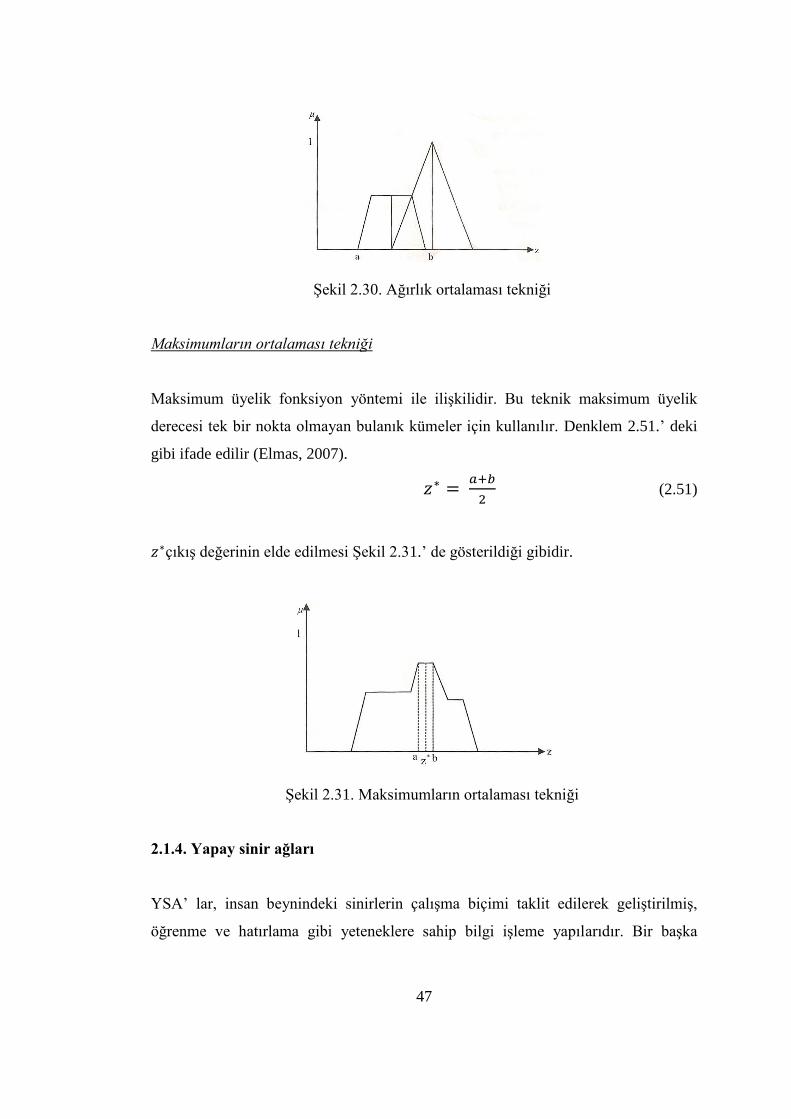
47
30Şekil 2.30. Ağırlık ortalaması tekniği
Maksimumların ortalaması tekniği
Maksimum üyelik fonksiyon yöntemi ile ilişkilidir. Bu teknik maksimum üyelik
derecesi tek bir nokta olmayan bulanık kümeler için kullanılır. Denklem 2.51.‟ deki
gibi ifade edilir (Elmas, 2007).
(2.51)
çıkış değerinin elde edilmesi Şekil 2.31.‟ de gösterildiği gibidir.
31Şekil 2.31. Maksimumların ortalaması tekniği
2.1.4. Yapay sinir ağları
YSA‟ lar, insan beynindeki sinirlerin çalışma biçimi taklit edilerek geliştirilmiş,
öğrenme ve hatırlama gibi yeteneklere sahip bilgi işleme yapılarıdır. Bir başka
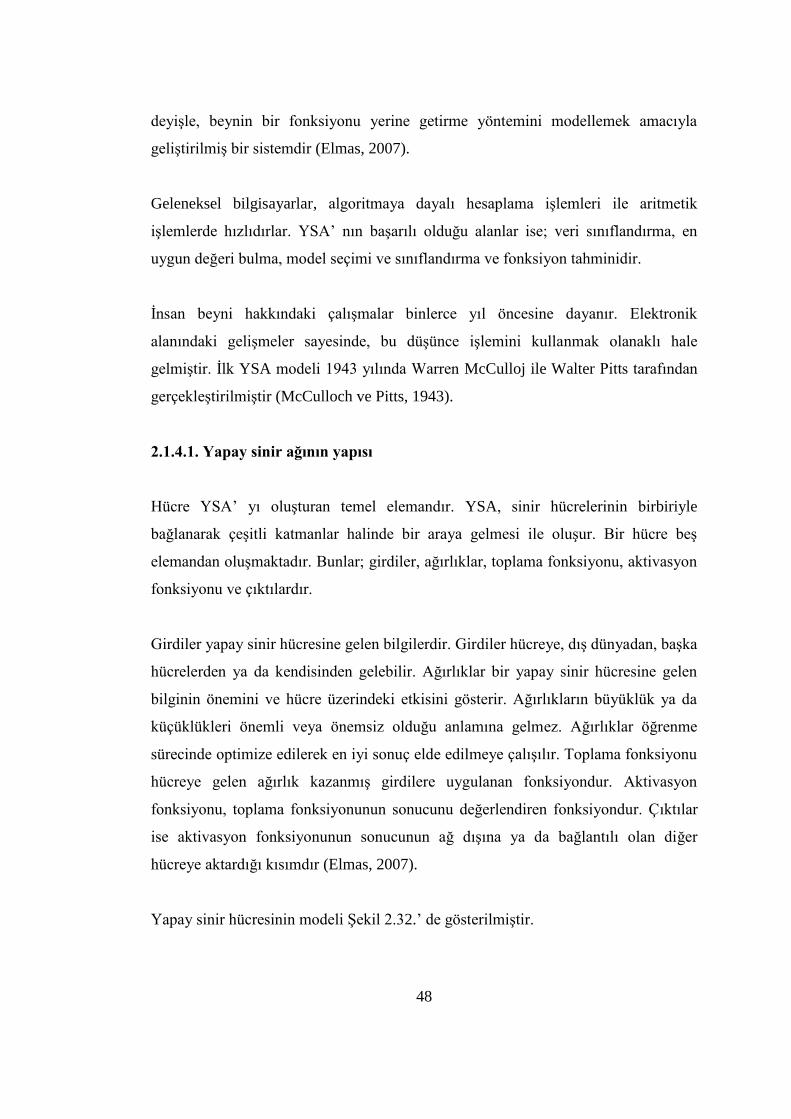
48
deyişle, beynin bir fonksiyonu yerine getirme yöntemini modellemek amacıyla
geliştirilmiş bir sistemdir (Elmas, 2007).
Geleneksel bilgisayarlar, algoritmaya dayalı hesaplama işlemleri ile aritmetik
işlemlerde hızlıdırlar. YSA‟ nın başarılı olduğu alanlar ise; veri sınıflandırma, en
uygun değeri bulma, model seçimi ve sınıflandırma ve fonksiyon tahminidir.
İnsan beyni hakkındaki çalışmalar binlerce yıl öncesine dayanır. Elektronik
alanındaki gelişmeler sayesinde, bu düşünce işlemini kullanmak olanaklı hale
gelmiştir. İlk YSA modeli 1943 yılında Warren McCulloj ile Walter Pitts tarafından
gerçekleştirilmiştir (McCulloch ve Pitts, 1943).
2.1.4.1. Yapay sinir ağının yapısı
Hücre YSA‟ yı oluşturan temel elemandır. YSA, sinir hücrelerinin birbiriyle
bağlanarak çeşitli katmanlar halinde bir araya gelmesi ile oluşur. Bir hücre beş
elemandan oluşmaktadır. Bunlar; girdiler, ağırlıklar, toplama fonksiyonu, aktivasyon
fonksiyonu ve çıktılardır.
Girdiler yapay sinir hücresine gelen bilgilerdir. Girdiler hücreye, dış dünyadan, başka
hücrelerden ya da kendisinden gelebilir. Ağırlıklar bir yapay sinir hücresine gelen
bilginin önemini ve hücre üzerindeki etkisini gösterir. Ağırlıkların büyüklük ya da
küçüklükleri önemli veya önemsiz olduğu anlamına gelmez. Ağırlıklar öğrenme
sürecinde optimize edilerek en iyi sonuç elde edilmeye çalışılır. Toplama fonksiyonu
hücreye gelen ağırlık kazanmış girdilere uygulanan fonksiyondur. Aktivasyon
fonksiyonu, toplama fonksiyonunun sonucunu değerlendiren fonksiyondur. Çıktılar
ise aktivasyon fonksiyonunun sonucunun ağ dışına ya da bağlantılı olan diğer
hücreye aktardığı kısımdır (Elmas, 2007).
Yapay sinir hücresinin modeli Şekil 2.32.‟ de gösterilmiştir.
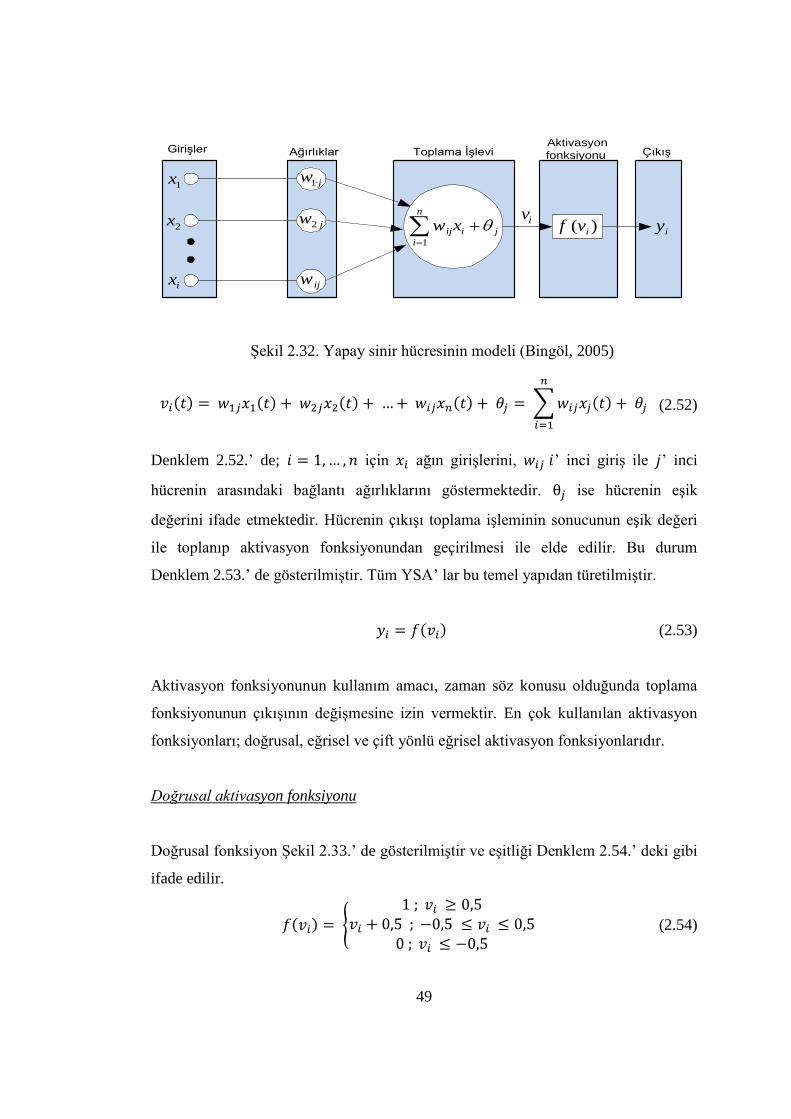
49
∑
1x
2x
ix
jw1
jw2
ijw
Girişler Ağırlıklar
n
i
jiijxw1
)( ivfiv
iy
Toplama İşleviAktivasyon
fonksiyonu Çıkış
32Şekil 2.32. Yapay sinir hücresinin modeli (Bingöl, 2005)
(2.52)
Denklem 2.52.‟ de; için ağın girişlerini, ‟ inci giriş ile ‟ inci
hücrenin arasındaki bağlantı ağırlıklarını göstermektedir. ise hücrenin eşik
değerini ifade etmektedir. Hücrenin çıkışı toplama işleminin sonucunun eşik değeri
ile toplanıp aktivasyon fonksiyonundan geçirilmesi ile elde edilir. Bu durum
Denklem 2.53.‟ de gösterilmiştir. Tüm YSA‟ lar bu temel yapıdan türetilmiştir.
(2.53)
Aktivasyon fonksiyonunun kullanım amacı, zaman söz konusu olduğunda toplama
fonksiyonunun çıkışının değişmesine izin vermektir. En çok kullanılan aktivasyon
fonksiyonları; doğrusal, eğrisel ve çift yönlü eğrisel aktivasyon fonksiyonlarıdır.
Doğrusal aktivasyon fonksiyonu
Doğrusal fonksiyon Şekil 2.33.‟ de gösterilmiştir ve eşitliği Denklem 2.54.‟ deki gibi
ifade edilir.
{
(2.54)
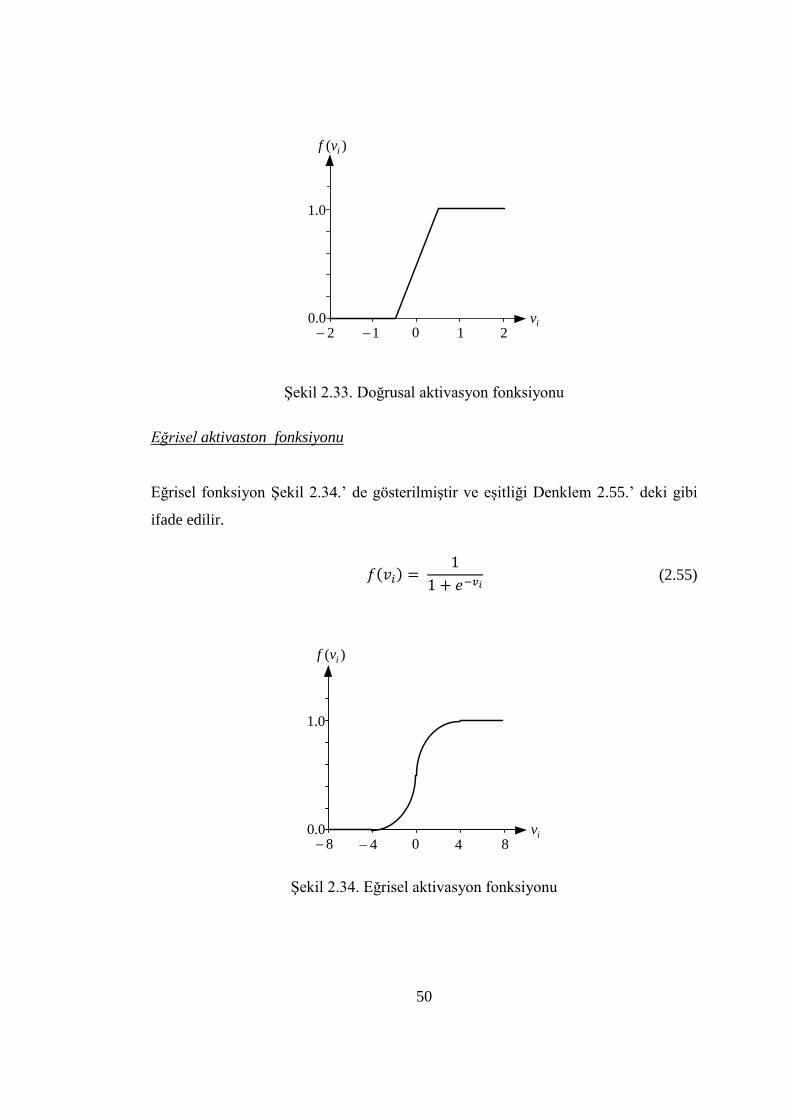
50
0.0
0.1
2 1 20
)( ivf
iv1
Şekil 2.33. Doğrusal aktivasyon fonksiyonu
Eğrisel aktivaston fonksiyonu
Eğrisel fonksiyon Şekil 2.34.‟ de gösterilmiştir ve eşitliği Denklem 2.55.‟ deki gibi
ifade edilir.
(2.55)
0.0
0.1
8 4 840
)( ivf
iv
Şekil 2.34. Eğrisel aktivasyon fonksiyonu
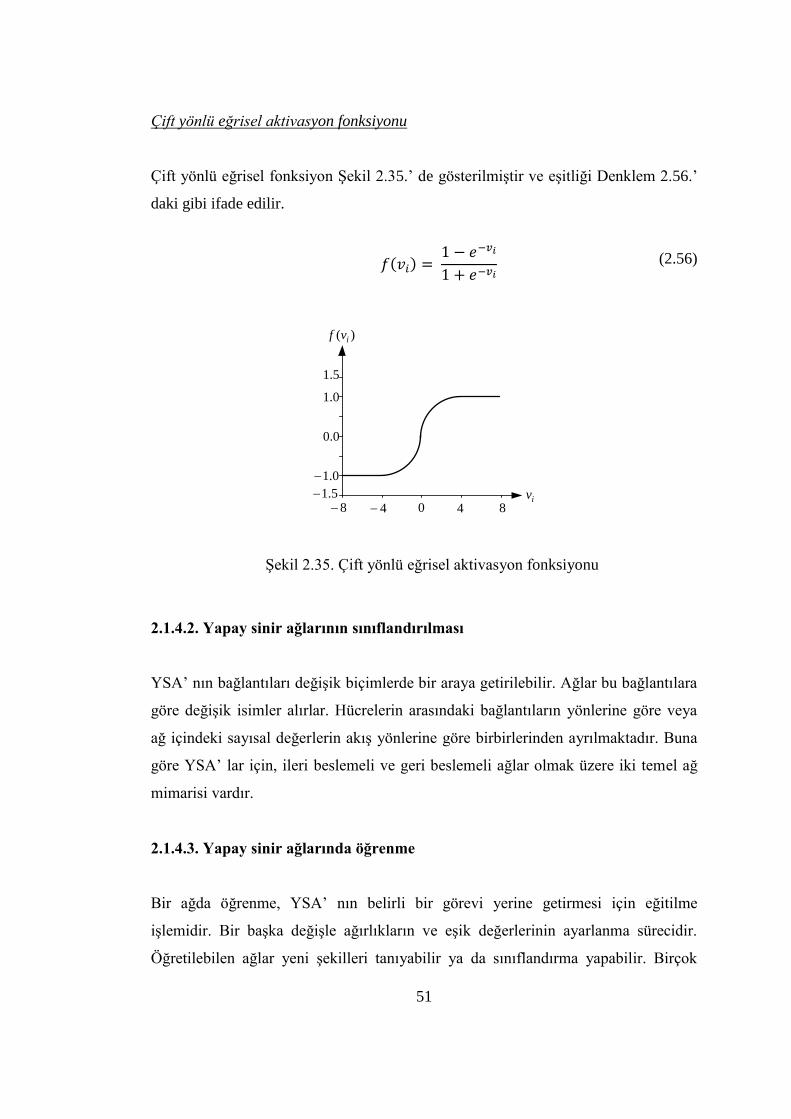
51
Çift yönlü eğrisel aktivasyon fonksiyonu
Çift yönlü eğrisel fonksiyon Şekil 2.35.‟ de gösterilmiştir ve eşitliği Denklem 2.56.‟
daki gibi ifade edilir.
(2.56)
5.1
0.1
8 4 840
)( ivf
iv
0.1
0.0
5.1
33Şekil 2.35. Çift yönlü eğrisel aktivasyon fonksiyonu
2.1.4.2. Yapay sinir ağlarının sınıflandırılması
YSA‟ nın bağlantıları değişik biçimlerde bir araya getirilebilir. Ağlar bu bağlantılara
göre değişik isimler alırlar. Hücrelerin arasındaki bağlantıların yönlerine göre veya
ağ içindeki sayısal değerlerin akış yönlerine göre birbirlerinden ayrılmaktadır. Buna
göre YSA‟ lar için, ileri beslemeli ve geri beslemeli ağlar olmak üzere iki temel ağ
mimarisi vardır.
2.1.4.3. Yapay sinir ağlarında öğrenme
Bir ağda öğrenme, YSA‟ nın belirli bir görevi yerine getirmesi için eğitilme
işlemidir. Bir başka değişle ağırlıkların ve eşik değerlerinin ayarlanma sürecidir.
Öğretilebilen ağlar yeni şekilleri tanıyabilir ya da sınıflandırma yapabilir. Birçok
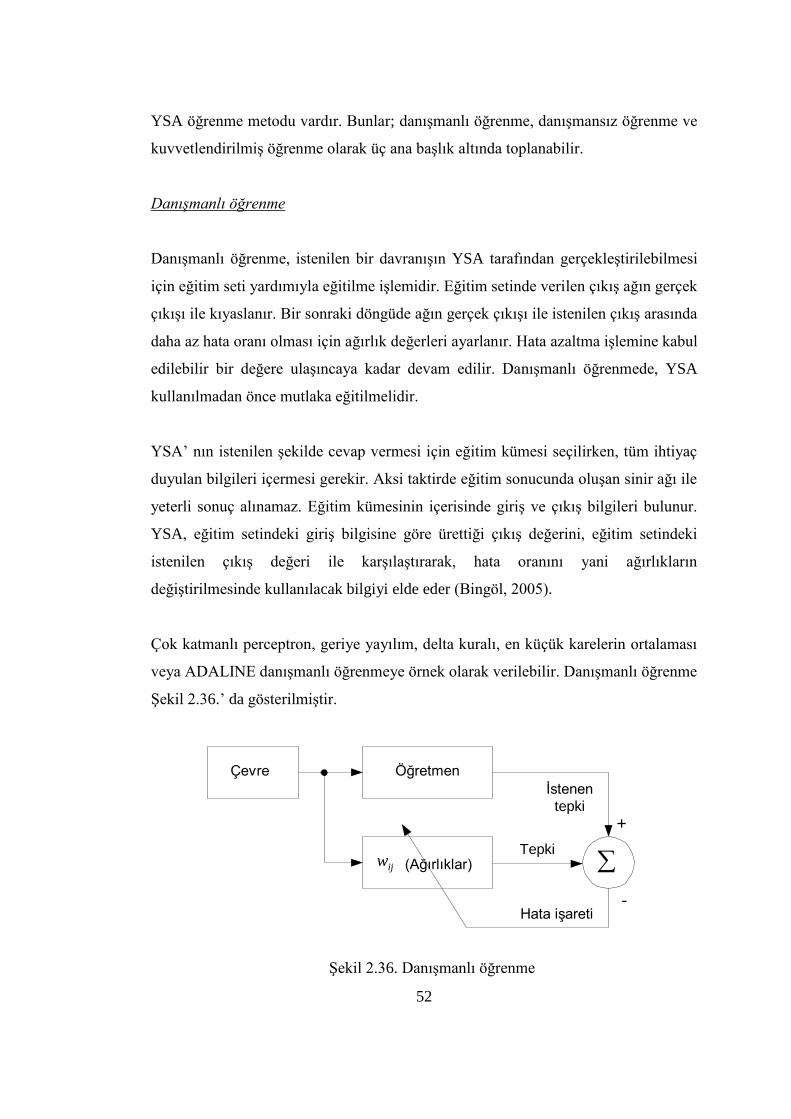
52
YSA öğrenme metodu vardır. Bunlar; danışmanlı öğrenme, danışmansız öğrenme ve
kuvvetlendirilmiş öğrenme olarak üç ana başlık altında toplanabilir.
Danışmanlı öğrenme
Danışmanlı öğrenme, istenilen bir davranışın YSA tarafından gerçekleştirilebilmesi
için eğitim seti yardımıyla eğitilme işlemidir. Eğitim setinde verilen çıkış ağın gerçek
çıkışı ile kıyaslanır. Bir sonraki döngüde ağın gerçek çıkışı ile istenilen çıkış arasında
daha az hata oranı olması için ağırlık değerleri ayarlanır. Hata azaltma işlemine kabul
edilebilir bir değere ulaşıncaya kadar devam edilir. Danışmanlı öğrenmede, YSA
kullanılmadan önce mutlaka eğitilmelidir.
YSA‟ nın istenilen şekilde cevap vermesi için eğitim kümesi seçilirken, tüm ihtiyaç
duyulan bilgileri içermesi gerekir. Aksi taktirde eğitim sonucunda oluşan sinir ağı ile
yeterli sonuç alınamaz. Eğitim kümesinin içerisinde giriş ve çıkış bilgileri bulunur.
YSA, eğitim setindeki giriş bilgisine göre ürettiği çıkış değerini, eğitim setindeki
istenilen çıkış değeri ile karşılaştırarak, hata oranını yani ağırlıkların
değiştirilmesinde kullanılacak bilgiyi elde eder (Bingöl, 2005).
Çok katmanlı perceptron, geriye yayılım, delta kuralı, en küçük karelerin ortalaması
veya ADALINE danışmanlı öğrenmeye örnek olarak verilebilir. Danışmanlı öğrenme
Şekil 2.36.‟ da gösterilmiştir.
(Ağırlıklar)ijw
Çevre Öğretmen
+
-
İstenen
tepki
Tepki
Hata işareti
34Şekil 2.36. Danışmanlı öğrenme
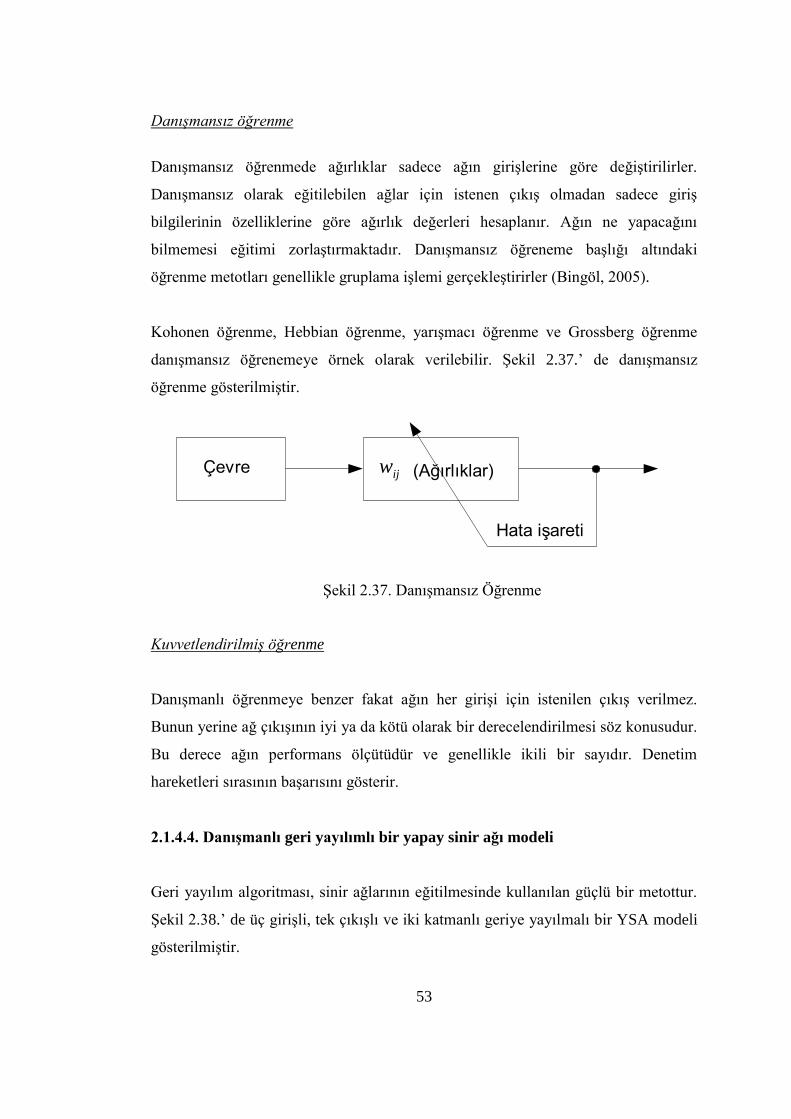
53
Danışmansız öğrenme
Danışmansız öğrenmede ağırlıklar sadece ağın girişlerine göre değiştirilirler.
Danışmansız olarak eğitilebilen ağlar için istenen çıkış olmadan sadece giriş
bilgilerinin özelliklerine göre ağırlık değerleri hesaplanır. Ağın ne yapacağını
bilmemesi eğitimi zorlaştırmaktadır. Danışmansız öğreneme başlığı altındaki
öğrenme metotları genellikle gruplama işlemi gerçekleştirirler (Bingöl, 2005).
Kohonen öğrenme, Hebbian öğrenme, yarışmacı öğrenme ve Grossberg öğrenme
danışmansız öğrenemeye örnek olarak verilebilir. Şekil 2.37.‟ de danışmansız
öğrenme gösterilmiştir.
(Ağırlıklar)ijwÇevre
Hata işareti
35Şekil 2.37. Danışmansız Öğrenme
Kuvvetlendirilmiş öğrenme
Danışmanlı öğrenmeye benzer fakat ağın her girişi için istenilen çıkış verilmez.
Bunun yerine ağ çıkışının iyi ya da kötü olarak bir derecelendirilmesi söz konusudur.
Bu derece ağın performans ölçütüdür ve genellikle ikili bir sayıdır. Denetim
hareketleri sırasının başarısını gösterir.
2.1.4.4. DanıĢmanlı geri yayılımlı bir yapay sinir ağı modeli
Geri yayılım algoritması, sinir ağlarının eğitilmesinde kullanılan güçlü bir metottur.
Şekil 2.38.‟ de üç girişli, tek çıkışlı ve iki katmanlı geriye yayılmalı bir YSA modeli
gösterilmiştir.
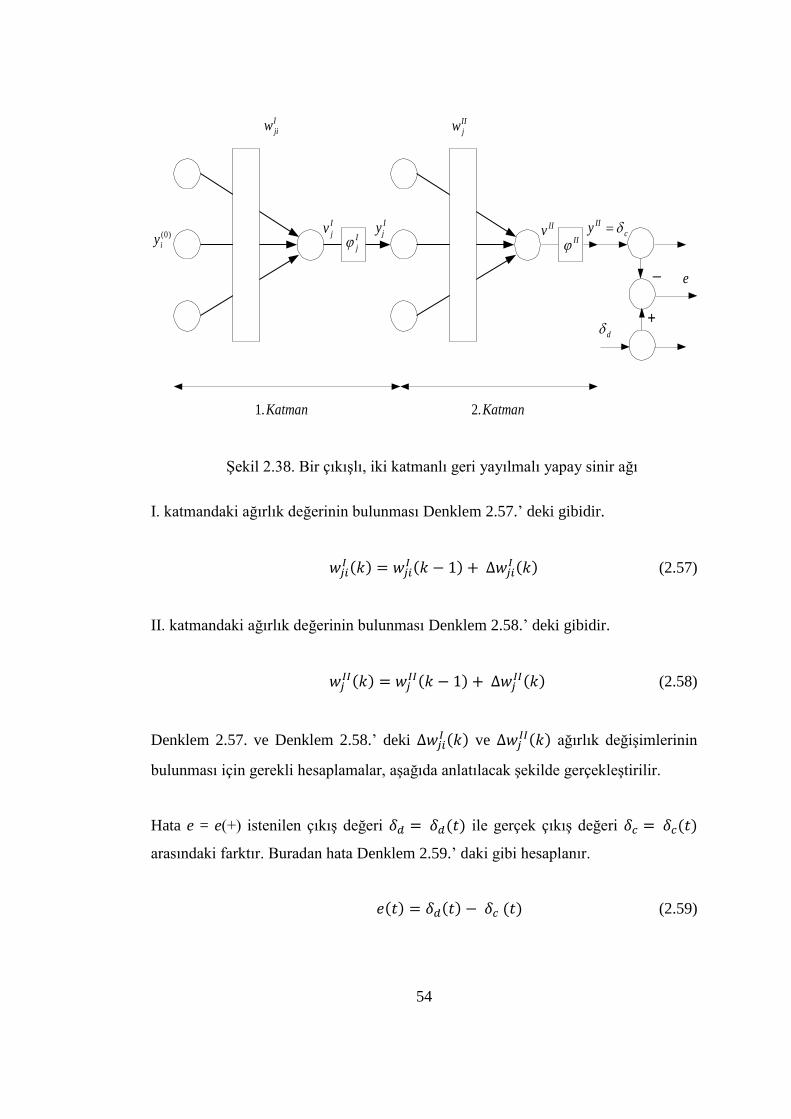
54
)0(
iy
I
jiw II
jw
I
jvI
j
IIvII
c
IIy
e
d
I
jy
Katman.1 Katman.2
+
_
36Şekil 2.38. Bir çıkışlı, iki katmanlı geri yayılmalı yapay sinir ağı
I. katmandaki ağırlık değerinin bulunması Denklem 2.57.‟ deki gibidir.
(2.57)
II. katmandaki ağırlık değerinin bulunması Denklem 2.58.‟ deki gibidir.
(2.58)
Denklem 2.57. ve Denklem 2.58.‟ deki ve
ağırlık değişimlerinin
bulunması için gerekli hesaplamalar, aşağıda anlatılacak şekilde gerçekleştirilir.
Hata e = e(+) istenilen çıkış değeri ile gerçek çıkış değeri
arasındaki farktır. Buradan hata Denklem 2.59.‟ daki gibi hesaplanır.
(2.59)

55
Performans ya da performans indeksi (E), hatanın (e) karesinin yarısı olarak
Denklem 2.60.‟ daki gibidir.
(2.60)
Geriye yayılım algoritmasında, performans indeksinin (E) minimize edilmesine
çalışılır. Şekil 2.38.‟ de iki katmanlı sinir ağının genel gösterimi verilmiştir.
ifadesi ikinci katmanın çıkışıdır dolayısıyla yapay sinir ağının çıkışıdır. ise birinci
katmandaki sinirin çıkışıdır. Bu çıkış ikinci katmanın girişidir. Çıkış katmanından
itibaren performans indeksi Denklem 2.61.‟ de gösterildiği gibidir.
(2.61)
ifadesi Denklem 2.61.‟ de yerine konulursa Denklem 2.62. elde edilir.
(2.62)
Denklem 2.62.‟ nin sağ tarafındaki türevli kısım gibi bir değişenle ifade edilirse
Denklem 2.63. elde edilir.
(2.63)
Buradan Denklem 2.62. yeniden düzenlenirse Denklem 2.64. elde edilir.
(2.64)
Denklem 2.63.‟ deki her bir türevin bileşeninin açılımı aşağıdaki gibi yapılır.
Denklem 2.65. performans indeksi ile hata arasındaki türevin sonucudur.

56
(2.65)
Denklem 2.66.‟ da hata ile II. katmanın çıkışı arasındaki türevin sonucu verilmiştir.
(2.66)
Elde edilen bu değerler Denklem 2.63.‟ de yerine konulursa Denklem 2.67. elde
edilir.
(2.67)
(2.68)
II. katmanın ağırlık değişimi ( ), öğrenme katsayısı ( ) ile orantılıdır.
(2.69)
(2.70)
Denklem 2.70.‟ de elde edilen ağırlık değişimi Denklem 2.58.‟ de yerine konularak
II. katmanın ağırlık değerleri yenilenir.
II. katman için tüm ağırlık ayarlanmaları I. Katman için de yapılacaktır.
(2.71)
Denklem 2.71.‟ in en sağ tarafındaki türevli kısım ( ) gibi bir değişkenle ifade
edilirse Denklem 2.72. elde edilir.
(2.72)

57
[
][ ( )]
Denklem 2.72., Denklem 2.71.‟ de yerine konulursa Denklem 2.73. elde edilir.
(2.73)
Denklem 2.73.‟ ün sağ tarafındaki türevli kısımlar ( ) gibi bir değişkenle ifade
edilirse Denklem 2.74. elde edilir.
(2.74)
Denklem 2.74. tekrar yazılacak olursa Denklem 2.75. elde edilir.
(2.75)
I. katman içinde delta kuralı uygulanırsa ağırlık değişim değerleri Denklem 2.76. ya
da Denklem 2.77.‟ deki gibi ifade edilebilir.
(2.76)
(2.77)
Denklem 2.77., Denklem 2.70.‟ de olduğu II. katman için yapılan ağırlık
ayarlamasına benzerdir. Burada değişkeni I. katman için kullanılan öğrenme
sabitidir. Denklem 2.78.‟ deki türevli kısım gibi bir değişkenle gösterilirse,
(2.78)
Burada Denklem 2.78.‟ in sağ tarafındaki ifadeler Denklem 2.79. ve Denklem 2.80.‟
de gösterildiği gibidir.

58
(
)
⌊
⌋
⌊
⌋
(2.79)
(2.80)
(2.81)
2.81.‟ in sağ tarafındaki ifadeler Denklem 2.82. ve Denklem 2.83.‟ de gösterildiği
gibidir.
(2.82)
(2.83)
Her bir katmandaki ve öğrenme katsayıları değişkendir. Ayrıca yerel minimum
noktasını yakalamak için de momentum katsayısı değişkeni kullanılır. Bu değişken
aralığında seçilmelidir. Her bir katmanın ağırlık ayarlamaları için
momentum katsayısı Denklem 2.84. ve Denklem 2.85.‟ deki gibi kullanılır.
(2.84)
(2.85)
Geri yayılımlı öğrenme algoritması Şekil 2.39.‟ da gösterilmiştir.
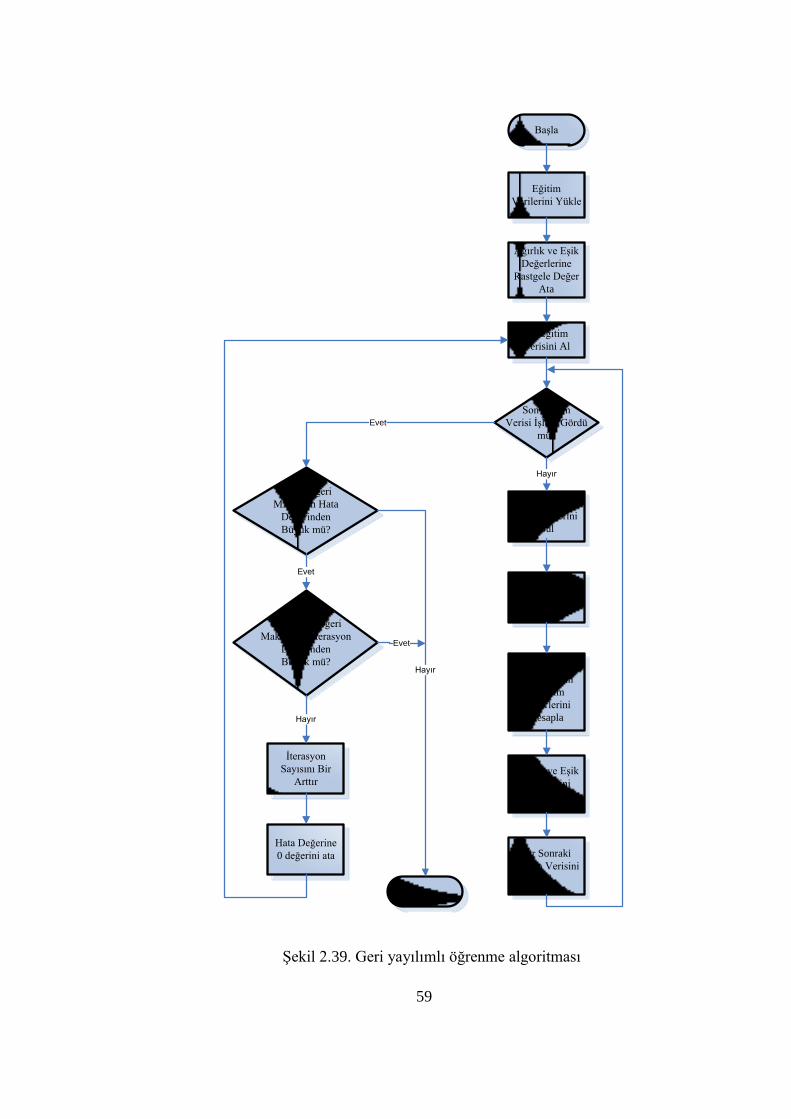
59
Başla
Eğitim
Verilerini Yükle
Son Eğitim
Verisi İşlem Gördü
mü?
Ağırlık ve Eşik
Değerlerine
Rastgele Değer
Ata
İlk Eğitim
Verisini Al
Ağı İleri Yay
Çıkış Değerini
Bul
Hayır
Hata Değerini
Bul ve Topla
Hata Değeri
Minimum Hata
Değerinden
Büyük mü?
Evet
İterasyon Değeri
Maksimum İterasyon
Değerinden
Büyük mü?
Evet
Dur
Hayır
Evet
İterasyon
Sayısını Bir
Arttır
Ağırlık ve Eşik
Değerlerinin
Değişim
Değerlerini
Hesapla
Ağırlık ve Eşik
Değerlerini
Güncelle
Hayır
Bir Sonraki
Eğitim Verisini
Al
Hata Değerine
0 değerini ata
37Şekil 2.39. Geri yayılımlı öğrenme algoritması
60
2.1.4.5. Girdilerin ve çıktıların ölçeklendirilmesi
Eğitim kümesi hazırlanırken bazı durumlarda, girdiler arasında aşırı büyük veya
küçük değerler görülebilir. Bu değerler eğitimde ağı yanlış yönlendirebilirler. Bütün
girdilerin belirli bir aralıkta toplanması gerekir ki bu aralık genelde sıfır ile bir
arasında seçilir. Bu durumda en büyük değerler bir değerini alır ve en küçük değerler
de sıfır değerini alır. Ölçeklendirme için genellikle Denklem 2.86.‟ da gösterilen
eşitlik kullanılır.
(2.86)
Çıktıların ölçeklendirilmesinde ise, genel olarak aktivasyon fonksiyonlarının çıkışları
[0, 1] ya da [-1, 1] aralığında yer alır. Eğitim kümesinde çıkış değerinin birden büyük
olması ağın eğitimde yanlış yönlendirilmesine sebep olabilir. Bu durumda eğitim
verilerindeki çıkış örneklerinin öncelikle [0, 1] aralığına ölçeklenmesi ve eğitim
sonlandırıldığında da çıkış verilerinin tekrar gerçek çıkış değerlerine çevrilmeleri
gerekmektedir (Öztemel, 2006). Ölçeklendirilmiş değerden orijinal değere dönüşüm
eşitliği Denklem 2.87.‟ de gösterildiği gibidir.
(2.87)
2.1.4.6. Öğrenme katsayısının ağ üzerindeki etkisi
Öğrenme katsayısının değeri, yapay sinir ağını eğitme işlemini önemli bir şekilde
etkiler. Eğitimin tamamlanma süresi göz önüne alındığında, küçük öğrenme katsayısı
seçimi eğitim süresini arttırırken, büyük katsayı seçimi süreyi azaltır. Ağın toplam
hatası incelendiğinde ise, öğrenme katsayısının arttırılmasının toplam hata üzerinde
pozitif etki ettiği görülmektedir. Ancak öğrenme katsayısına çok büyük değerler
verildiğinde yakınsama olayı meydana gelmemektedir (Elmas, 2007).
61
2.1.4.7. Momentum katsayısının ağ üzerindeki etkisi
Momentum katsayısının kullanılması, yapay sinir ağını eğitme performansı üzerinde
etkilidir. Momentum katsayısı, eğitim adım sayısı ve toplam ağ hatasını azaltır.
Momentum katsayısının yüksek alınması durumunda, ağdaki toplam hatanın sıfıra
doğru daha fazla bir eğimle yaklaştığı görülmektedir (Elmas, 2007).
2.1.4.8. Gizli katmanın ağ üzerindeki etkisi
Gizli katman sayısının arttırılması daha fazla işlem anlamına geldiğinden,
simülasyon sırasında hafıza kullanımını ve işlemcinin yükünü arttırır. Ancak bu
durumda öğrenme işlemi daha hassas yapılabilmektedir. Az sayıda gizli katman
kullanılması ağın hatırlama yeteneğini negatif yönde etkiler. Bu sebeple ara katman
sayıları ve katmandaki hücre sayısı genellikle deneme yanılma yöntemi ile belirlenir
(Elmas, 2007).
2.1.4.9. Hata farkı değerinin ağ üzerindeki etkisi
Hata farkı değeri, toplam çıkış hatasındaki hassasiyet ile ilgilidir. Küçük hata farkı
değeri ağın toplam çıkış hatasını daha fazla sıfıra doğru yaklaştırır. Bu sayede
bağlantı ağırlıklarının hassasiyeti de artar. Eğitim süresi açısından bakıldığında ise
hata farkı değerinin küçülmesi eğitim süresini ve eğitim adım sayısını arttırmaktadır
(Elmas, 2007).
2.1.5. Sinirsel bulanık mantık
Yapay zeka tekniklerinin her birinin kendine has yetenekleri ve özellikleri
bulunmaktadır. Örneğin BM insanın karar verme yeteneğinden esinlenerek ortaya
çıkmıştır. Dolayısıyla karar verme ve çıkarım yapma konularında iyidir. YSA ise
insanın öğrenme yeteneğinden esinlenerek ortaya çıkmıştır. Dolayısıyla o da
öğreneme ve örnekleri tanıma gibi konularda iyidir.
62
Sinirsel bulanık mantık kavramı, BM denetleyicisinin karar verme yeteneğinin ve
YSA‟ nın öğrenme yeteneğinin birleştirilmesi fikri ile ortaya çıkmıştır. Bu yolla, BM
ile denetlenen sistemlere, YSA‟ nın öğrenme yeteneği kazandırılırken, YSA‟ ya da
BM denetleyicisinin karar verme yeteneği kazandırılmıştır (Elmas, 2007).
Sinirsel bulanık denetleyicisinin kullanılmasındaki asıl amaç, BM denetleyicisinin
parametrelerini ayarlamaktır. Bu yolla, BM denetleyicisinde ayarlanması gereken,
her bir giriş için üyelik fonksiyonlarının tanımlanması, çıkış üyelik fonksiyonlarının
tanımlanması ve kural tabanının oluşturulması işlemleri gerçekleştirilir.
BM denetleyicilerde, uzman kişinin bilgilerinden oluşturulan kurallar dilsel ifadelere
çevrildiği halde genellikle tasarım deneme yanılma yöntemiyle yapılmaktadır. Bu
işlem uzun zaman alabilir. Bu işlemler YSA‟ nın eğitilme fonksiyonu ile daha kolay
bir şekilde yapılabilir.
Sinirsel bulanık denetleyiciler genellikle ileri beslemeli ve çok katmanlı yapıdadırlar.
En çok kullanılan sinirsel bulanık mantık sistemleri ANFIS, FALCON, FuNe,
RuleNet, GARIC, NEFCLASS, NEFCON ve NEFPROX sistemleridir (Elmas,
2007).
Bu çalışmada yalnızca ANFIS sinirsel bulanık denetleyicisi kullanılmıştır.
2.1.5.1. ANFIS
ANFIS denetleyici ismi, Adaptive Neuro Fuzzy Interface System‟ in baş harflerinin
birleştirilmesi oluşturulmuştur. Türkçe‟ si uyarlamalı sinirsel bulanık çıkarım ara
yüzüdür. BM denetleyici ile YSA‟ lardaki çok katmanlı perceptronların birleştirilmiş
hali gibi düşünülebilir.
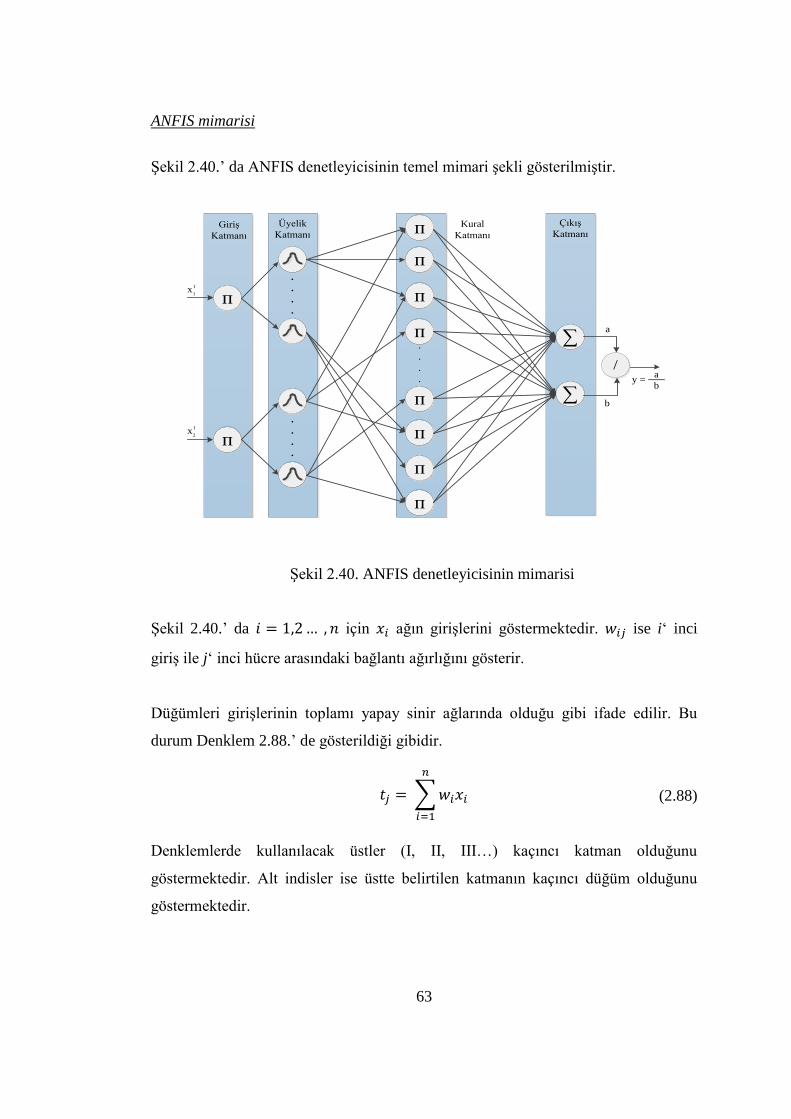
63
∑
ANFIS mimarisi
Şekil 2.40.‟ da ANFIS denetleyicisinin temel mimari şekli gösterilmiştir.
ᴨ
ᴨ
ᴨ
ᴨ
ᴨ
ᴨ
ᴨ
ᴨ
∑
∑
/
ᴨ
ᴨ
.
.
.
.
.
.
.
.
.
.
.
.
a
b
y = a
b
x1
I
x2
I
Giriş
Katmanı
Üyelik
Katmanı
Çıkış
KatmanıKural
Katmanı
38Şekil 2.40. ANFIS denetleyicisinin mimarisi
Şekil 2.40.‟ da için ağın girişlerini göstermektedir. ise i„ inci
giriş ile j„ inci hücre arasındaki bağlantı ağırlığını gösterir.
Düğümleri girişlerinin toplamı yapay sinir ağlarında olduğu gibi ifade edilir. Bu
durum Denklem 2.88.‟ de gösterildiği gibidir.
(2.88)
Denklemlerde kullanılacak üstler (I, II, III…) kaçıncı katman olduğunu
göstermektedir. Alt indisler ise üstte belirtilen katmanın kaçıncı düğüm olduğunu
göstermektedir.

64
(
)
( )
( )
Birinci katmanda hücreler arasındaki ağırlık değerleri 1‟ dir. Bu katmanda ağırlık
değerleri değişmemektedir. Ayrıca aktivasyon fonksiyonu da 1 olduğundan hücrenin
girişi ile çıkışı birbirine eşittir. Bu durum Denklem 2.89. ve Denklem 2.90.‟ da
gösterilmiştir.
(2.89)
(2.90)
İkinci katman üyelik katmanıdır ve bu katmandaki hücreler üyelik fonksiyonlarını
temsil ederler. Bu katmandaki üyelik fonksiyonları gaussian üyelik fonksiyonu
olarak seçilir. İkinci katmandaki hücrelerin çıkışını hesaplamak için Denklem 2.91.
ve Denklem 2.92.‟ de gösterilen ifadeler kullanılır.
(2.91)
(2.92)
, birinci katmandaki i‟ inci hücreden çıkan işaretin ikinci kamandaki j‟ inci
hücreye girişini gösterir. Birinci katman ile ikinci katman arasında bağlantı ağırlığı
1‟dir. Bu katmanın hücreleri için tanımlanan gaussian üyelik fonksiyonunun merkezi
ve genişliği de
olarak ifade edilir.
Örneğin iki girişli bir BM denetleyicisinde, ANFIS denetleyicisinin ikinci
katmanında bulunan hücre sayısı, üyelik fonksiyonu kümeleri üçe üçlük seçilirse altı,
beşe beş seçilirse on, yediye yedilik seçilirse 14 adet olmalıdır.
Üçüncü katman BM denetleyicisindeki kural tabanının ayarlanacağı katmandır. Bu
katmandaki her bir hücre bir kuralı temsil etmektedir. İkinci katmandan hücreye
gelen değerlerden küçük olanı hücre giriş ifadesi olarak alınır. Bu durum Denklem

65
(
)
( )
∑
∑
2.93.‟ de gösterilmiştir. Bu katmanda aktivasyon fonksiyonunun değeri 1‟ dir ve
Denklem 2.94.‟ de gösterildiği gibi ifade edilir.
(2.93)
(2.94)
Yukarıdaki denklemlerdeki birinci girişe ait üyelik fonksiyonlarının çıkışından
alınan giriş değerini, ise ikinci girişe ait üyelik fonksiyonlarının çıkışından
alınan giriş değerini ifade etmektedir.
Bu katmandaki hücre sayısı, ikinci katmanda yer alan ve birinci giriş için tanımlanan
hücre sayısının, ikinci giriş için tanımlanan hücre sayısı ile çarpımı ile bulunur. Yani,
yediye yedilik tanımlanan bir bulanık mantık denetleyicisi için bu katmanda kırk
dokuz adet hücre bulunmalıdır.
Dördüncü ve son katman olan çıkış katmanı ise bulanık mantık denetleyicisindeki
durulaştırmanın uygulandığı katmandır. Durulaştırma metodu için ağırlık merkezi
durulaştırma yöntemi kullanılabilir. Şekil 2.40.‟ da gösterilen a ifadesinin değeri
Denklem 2.95., b ifadesinin değeri de Denklem 2.96.‟ da gösterildiği gibidir.
(2.95)
(2.96)
Denklem 2.95. ve Denklem 2.96.‟ daki ifadeler için; BM denetleyicisindeki
çıkış üyelik fonksiyonunun merkezini göstermektedir. ise kural katmanından
elde edilen üyelik değerlerini göstermektedir. n ifadeleri ise ikinci katmanda
tanımlanan hücre sayılarına göre değer alır. Örneğin yediye yedilik bir BM

66
denetleyicisi tanımlanacak ise n değeri yedi olur. Hücrenin aktivasyon
fonksiyonundan geçirilmeden önceki ifadesi Denklem 2.97.‟ de gösterilmiştir.
(2.97)
Bu katmandaki aktivasyon fonksiyonunun değeri 1‟ dir. Bu durum Denklem 2.98.‟
de gösterilmiştir.
(2.98)
2.1.5.2. ANFIS geri yayılımlı öğrenme algoritması
Sinirsel bulanık denetleyicisinin kullanılmasındaki asıl amaç, BM denetleyicisinin
parametrelerini ayarlamaktır. Sinirsel bulanık denetleyicisinin ikinci katmanında,
giriş üyelik fonksiyonları olarak kullanılan gaussian üyelik fonksiyonunun merkez ve
genişlik değerleri ayarlanır. Aynı şekilde üçüncü katmanda da çıkış üyelik
fonksiyonları ve kural tabanı ayarlanmaktadır (Elmas, 2008).
Sinirsel bulanık denetleyicisinin eğitimi için hata değeri E ile ifade edilir ve Denklem
2.99.‟ da gösterildiği gibi hesaplanır.
(2.99)
Eğitim dördüncü katmandan ilk katmana doğru gerçekleştirilir. Dördüncü katmanın
çıkışı ağın çıkışı olduğu için, bu katmanda hata değeri bulunur. Geri yayılma değeri
ile ifade edilir ve Denklem 2.100.‟ de gösterildiği gibi hesaplanır.
(2.100)

67
[
]
[
]
( )
[
]
∑
[
]
(
)
( )
[
]
(
)
( )
Ağırlıkların hata değerine bağlı olarak değişim hesabı Denklem 2.101.‟ de
gösterildiği şekilde ifade edilir.
(2.101)
Ağırlıkların ayarlanması ise Denklem 2.102.‟ de gösterildiği gibidir. Denklem
2.102.‟ de yer alan l ifadesi eğitim setindeki örnek indisini, ise öğrenme oranını
ifade etmektedir.
(2.102)
Üçüncü katmanda herhangi bir ağırlık değeri hesaplaması olmadığından sadece
dördüncü katmandan gelen hata değeri hesaplanmaktadır. Denklem 2.103.‟ de ‟
nin nasıl hesaplanacağı gösterilmiştir.
(2.103)
İkinci katmandaki hata değeri Denklem 2.104.‟ de gösterildiği gibi hesaplanır.
(2.104)
İkinci katmanda aynı üyelik fonksiyonunun hem merkezi hem de genişliğinin
ayarlanma işlemi gerçekleştirilir. Denklem 2.105.‟ de merkez değerinin değişimi,
Denklem 2.106.‟ da da genişlik değerinin değişim denklemleri verilmiştir.
(2.105)
(2.106)

68
Hesaplan değişim değerleri ile merkez ve genişlik değerleri Denklem 2.107. ve
Denklem 2.108.‟ deki gibi hesaplanır. Denklemlerdeki merkez değeri için
öğrenme oranını, ise genişlik değeri için öğreneme oranını ifade etmektedir.
(2.107)
(2.108)
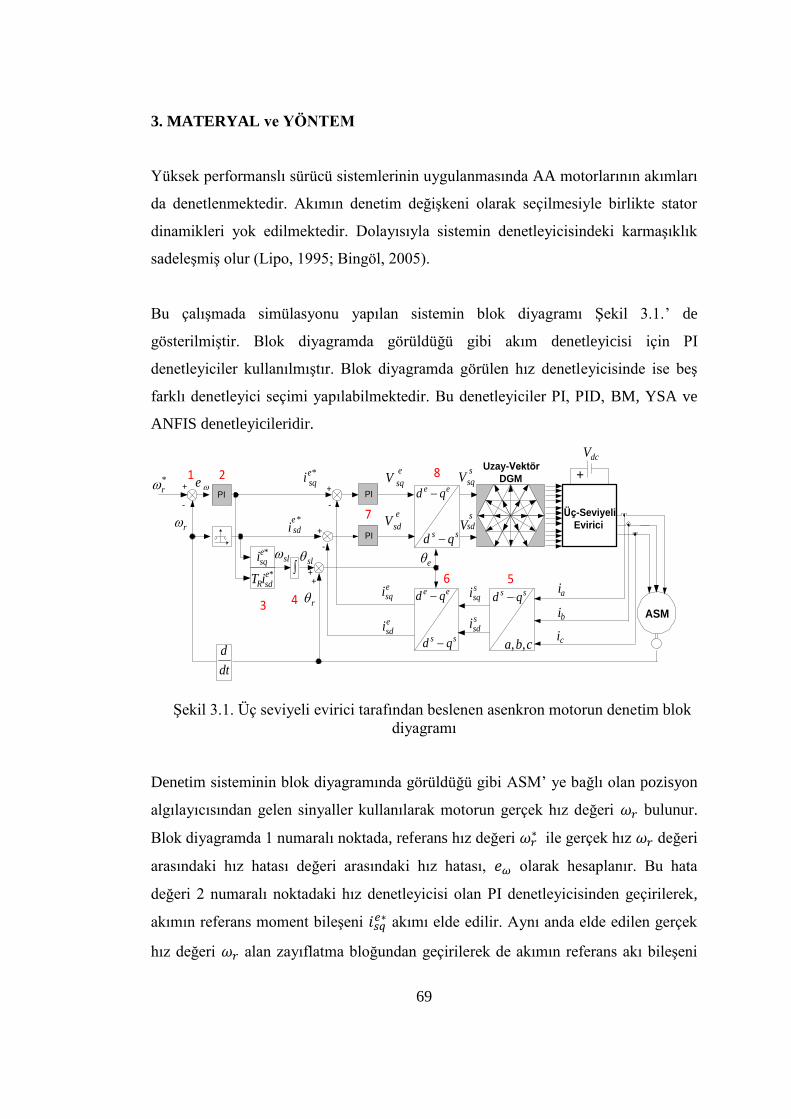
69
3. MATERYAL ve YÖNTEM
Yüksek performanslı sürücü sistemlerinin uygulanmasında AA motorlarının akımları
da denetlenmektedir. Akımın denetim değişkeni olarak seçilmesiyle birlikte stator
dinamikleri yok edilmektedir. Dolayısıyla sistemin denetleyicisindeki karmaşıklık
sadeleşmiş olur (Lipo, 1995; Bingöl, 2005).
Bu çalışmada simülasyonu yapılan sistemin blok diyagramı Şekil 3.1.‟ de
gösterilmiştir. Blok diyagramda görüldüğü gibi akım denetleyicisi için PI
denetleyiciler kullanılmıştır. Blok diyagramda görülen hız denetleyicisinde ise beş
farklı denetleyici seçimi yapılabilmektedir. Bu denetleyiciler PI, PID, BM, YSA ve
ANFIS denetleyicileridir.
ssdV
s
sqV
ci
*esqi
*esdi
dt
d
r
Uzay-Vektör
DGM
slsle
++
+
+
-
-
*r
r
+
-
e
esqi
esdi
*
*
esdR
esq
iT
i
Üç-Seviyeli
Evirici
ee qd
ss qd
ee qd
cba ,,
+
dcV
PI PI
PI
e
sqV
e
sdV
ss qd
ss qd
ssqi
ssdi
ASM
1 2
3 4
56
7
8
ai
bi
39Şekil 3.1. Üç seviyeli evirici tarafından beslenen asenkron motorun denetim blok
diyagramı
Denetim sisteminin blok diyagramında görüldüğü gibi ASM‟ ye bağlı olan pozisyon
algılayıcısından gelen sinyaller kullanılarak motorun gerçek hız değeri bulunur.
Blok diyagramda 1 numaralı noktada, referans hız değeri ile gerçek hız değeri
arasındaki hız hatası değeri arasındaki hız hatası, olarak hesaplanır. Bu hata
değeri 2 numaralı noktadaki hız denetleyicisi olan PI denetleyicisinden geçirilerek,
akımın referans moment bileşeni akımı elde edilir. Aynı anda elde edilen gerçek
hız değeri alan zayıflatma bloğundan geçirilerek de akımın referans akı bileşeni
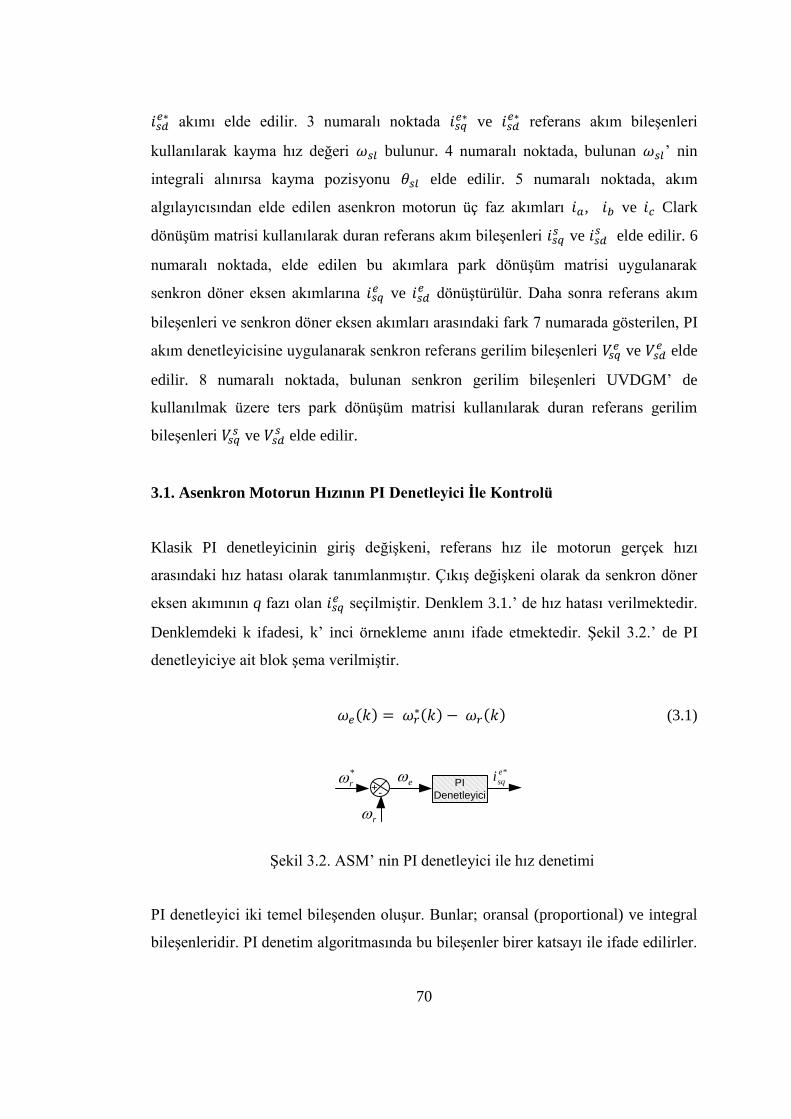
70
akımı elde edilir. 3 numaralı noktada
ve referans akım bileşenleri
kullanılarak kayma hız değeri bulunur. 4 numaralı noktada, bulunan ‟ nin
integrali alınırsa kayma pozisyonu elde edilir. 5 numaralı noktada, akım
algılayıcısından elde edilen asenkron motorun üç faz akımları , ve Clark
dönüşüm matrisi kullanılarak duran referans akım bileşenleri ve
elde edilir. 6
numaralı noktada, elde edilen bu akımlara park dönüşüm matrisi uygulanarak
senkron döner eksen akımlarına ve
dönüştürülür. Daha sonra referans akım
bileşenleri ve senkron döner eksen akımları arasındaki fark 7 numarada gösterilen, PI
akım denetleyicisine uygulanarak senkron referans gerilim bileşenleri ve
elde
edilir. 8 numaralı noktada, bulunan senkron gerilim bileşenleri UVDGM‟ de
kullanılmak üzere ters park dönüşüm matrisi kullanılarak duran referans gerilim
bileşenleri ve
elde edilir.
3.1. Asenkron Motorun Hızının PI Denetleyici Ġle Kontrolü
Klasik PI denetleyicinin giriş değişkeni, referans hız ile motorun gerçek hızı
arasındaki hız hatası olarak tanımlanmıştır. Çıkış değişkeni olarak da senkron döner
eksen akımının q fazı olan seçilmiştir. Denklem 3.1.‟ de hız hatası verilmektedir.
Denklemdeki k ifadesi, k‟ inci örnekleme anını ifade etmektedir. Şekil 3.2.‟ de PI
denetleyiciye ait blok şema verilmiştir.
(3.1)
e
r
*
r PI
Denetleyici+
-
*e
sqi
40Şekil 3.2. ASM‟ nin PI denetleyici ile hız denetimi
PI denetleyici iki temel bileşenden oluşur. Bunlar; oransal (proportional) ve integral
bileşenleridir. PI denetim algoritmasında bu bileşenler birer katsayı ile ifade edilirler.
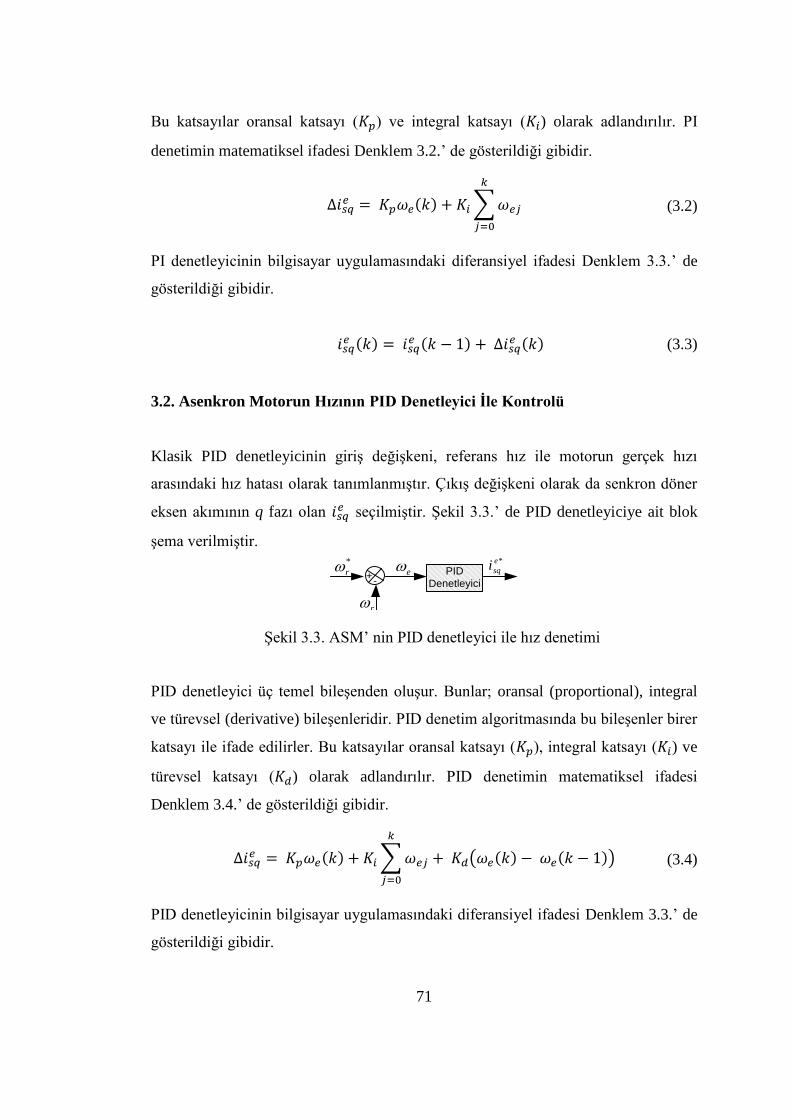
71
∑
∑
( )
Bu katsayılar oransal katsayı ( ) ve integral katsayı ( ) olarak adlandırılır. PI
denetimin matematiksel ifadesi Denklem 3.2.‟ de gösterildiği gibidir.
(3.2)
PI denetleyicinin bilgisayar uygulamasındaki diferansiyel ifadesi Denklem 3.3.‟ de
gösterildiği gibidir.
(3.3)
3.2. Asenkron Motorun Hızının PID Denetleyici Ġle Kontrolü
Klasik PID denetleyicinin giriş değişkeni, referans hız ile motorun gerçek hızı
arasındaki hız hatası olarak tanımlanmıştır. Çıkış değişkeni olarak da senkron döner
eksen akımının q fazı olan seçilmiştir. Şekil 3.3.‟ de PID denetleyiciye ait blok
şema verilmiştir.
e
r
*
r PID
Denetleyici+
-
*e
sqi
41Şekil 3.3. ASM‟ nin PID denetleyici ile hız denetimi
PID denetleyici üç temel bileşenden oluşur. Bunlar; oransal (proportional), integral
ve türevsel (derivative) bileşenleridir. PID denetim algoritmasında bu bileşenler birer
katsayı ile ifade edilirler. Bu katsayılar oransal katsayı ( ), integral katsayı ( ) ve
türevsel katsayı ( ) olarak adlandırılır. PID denetimin matematiksel ifadesi
Denklem 3.4.‟ de gösterildiği gibidir.
(3.4)
PID denetleyicinin bilgisayar uygulamasındaki diferansiyel ifadesi Denklem 3.3.‟ de
gösterildiği gibidir.
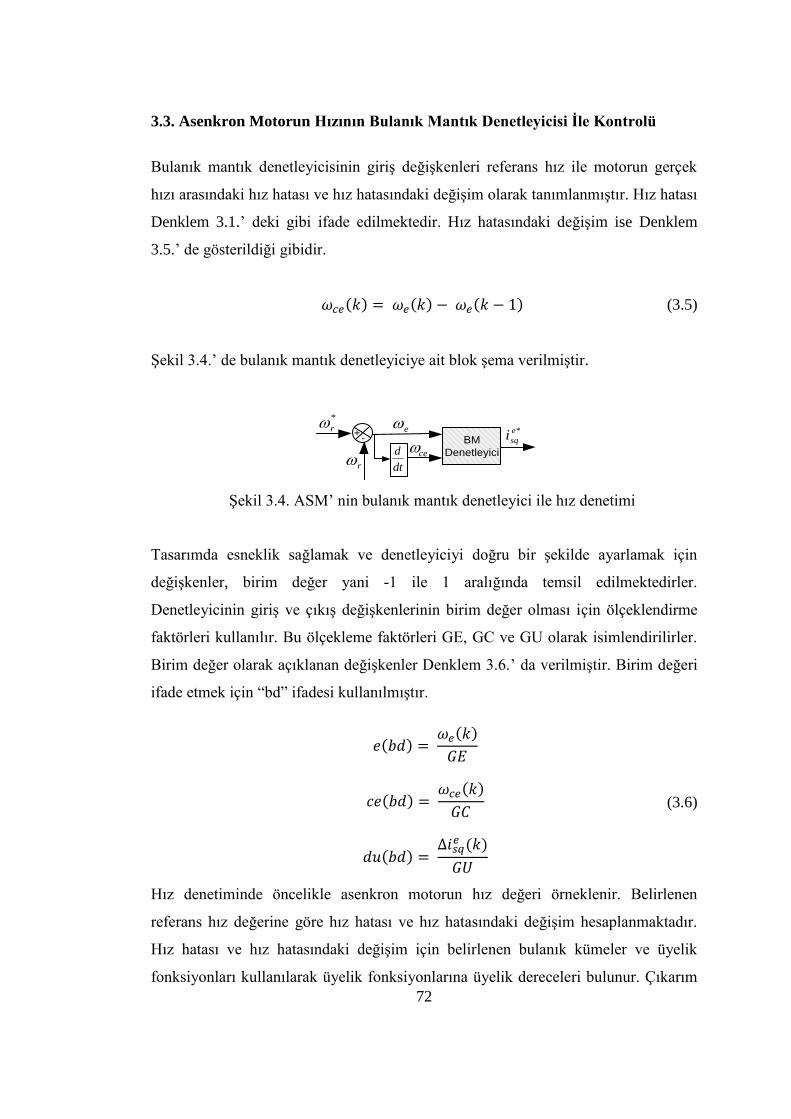
72
3.3. Asenkron Motorun Hızının Bulanık Mantık Denetleyicisi Ġle Kontrolü
Bulanık mantık denetleyicisinin giriş değişkenleri referans hız ile motorun gerçek
hızı arasındaki hız hatası ve hız hatasındaki değişim olarak tanımlanmıştır. Hız hatası
Denklem 3.1.‟ deki gibi ifade edilmektedir. Hız hatasındaki değişim ise Denklem
3.5.‟ de gösterildiği gibidir.
(3.5)
Şekil 3.4.‟ de bulanık mantık denetleyiciye ait blok şema verilmiştir.
e
r
*
rBM
Denetleyici
+-
*e
sqi
dt
d ce
42Şekil 3.4. ASM‟ nin bulanık mantık denetleyici ile hız denetimi
Tasarımda esneklik sağlamak ve denetleyiciyi doğru bir şekilde ayarlamak için
değişkenler, birim değer yani -1 ile 1 aralığında temsil edilmektedirler.
Denetleyicinin giriş ve çıkış değişkenlerinin birim değer olması için ölçeklendirme
faktörleri kullanılır. Bu ölçekleme faktörleri GE, GC ve GU olarak isimlendirilirler.
Birim değer olarak açıklanan değişkenler Denklem 3.6.‟ da verilmiştir. Birim değeri
ifade etmek için “bd” ifadesi kullanılmıştır.
(3.6)
Hız denetiminde öncelikle asenkron motorun hız değeri örneklenir. Belirlenen
referans hız değerine göre hız hatası ve hız hatasındaki değişim hesaplanmaktadır.
Hız hatası ve hız hatasındaki değişim için belirlenen bulanık kümeler ve üyelik
fonksiyonları kullanılarak üyelik fonksiyonlarına üyelik dereceleri bulunur. Çıkarım
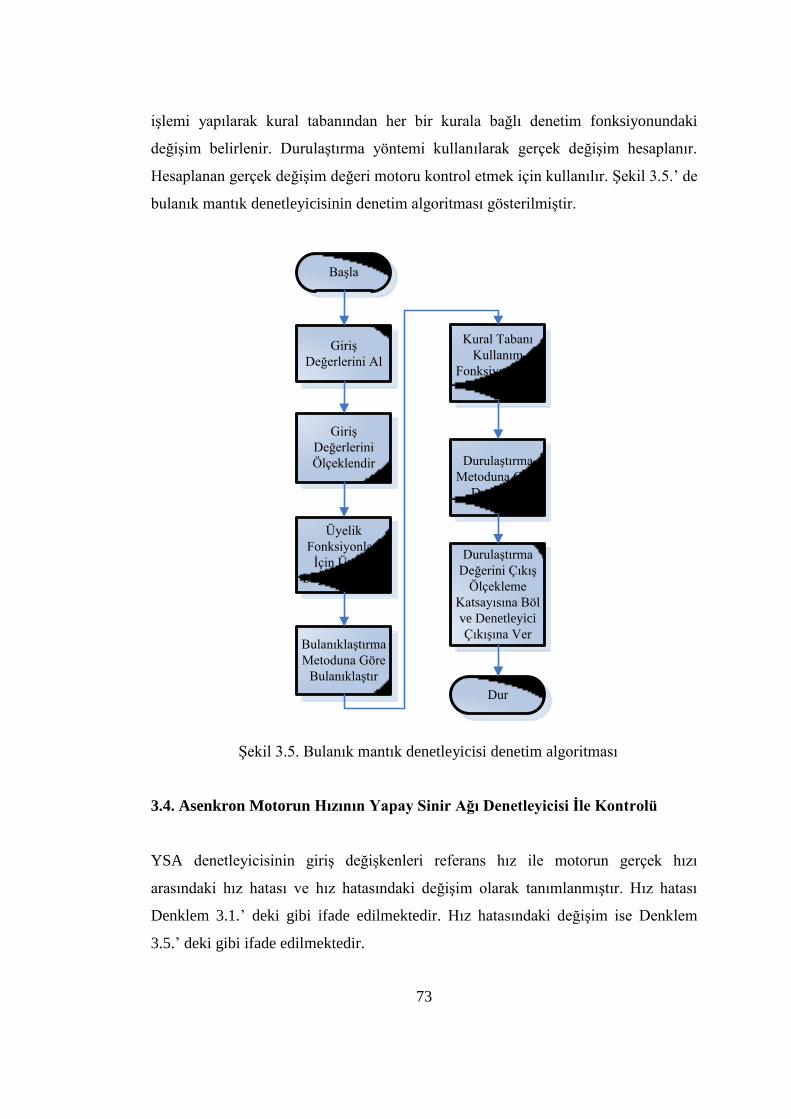
73
işlemi yapılarak kural tabanından her bir kurala bağlı denetim fonksiyonundaki
değişim belirlenir. Durulaştırma yöntemi kullanılarak gerçek değişim hesaplanır.
Hesaplanan gerçek değişim değeri motoru kontrol etmek için kullanılır. Şekil 3.5.‟ de
bulanık mantık denetleyicisinin denetim algoritması gösterilmiştir.
Başla
Giriş
Değerlerini Al
Giriş
Değerlerini
Ölçeklendir
Üyelik
Fonksiyonları
İçin Üyelik
Değerlerini Bul
Dur
Bulanıklaştırma
Metoduna Göre
Bulanıklaştır
Kural Tabanı
Kullanım
Fonksiyonlarını
Bul
Durulaştırma
Metoduna Göre
Durulaştır
Durulaştırma
Değerini Çıkış
Ölçekleme
Katsayısına Böl
ve Denetleyici
Çıkışına Ver
1Şekil 3.5. Bulanık mantık denetleyicisi denetim algoritması
3.4. Asenkron Motorun Hızının Yapay Sinir Ağı Denetleyicisi Ġle Kontrolü
YSA denetleyicisinin giriş değişkenleri referans hız ile motorun gerçek hızı
arasındaki hız hatası ve hız hatasındaki değişim olarak tanımlanmıştır. Hız hatası
Denklem 3.1.‟ deki gibi ifade edilmektedir. Hız hatasındaki değişim ise Denklem
3.5.‟ deki gibi ifade edilmektedir.
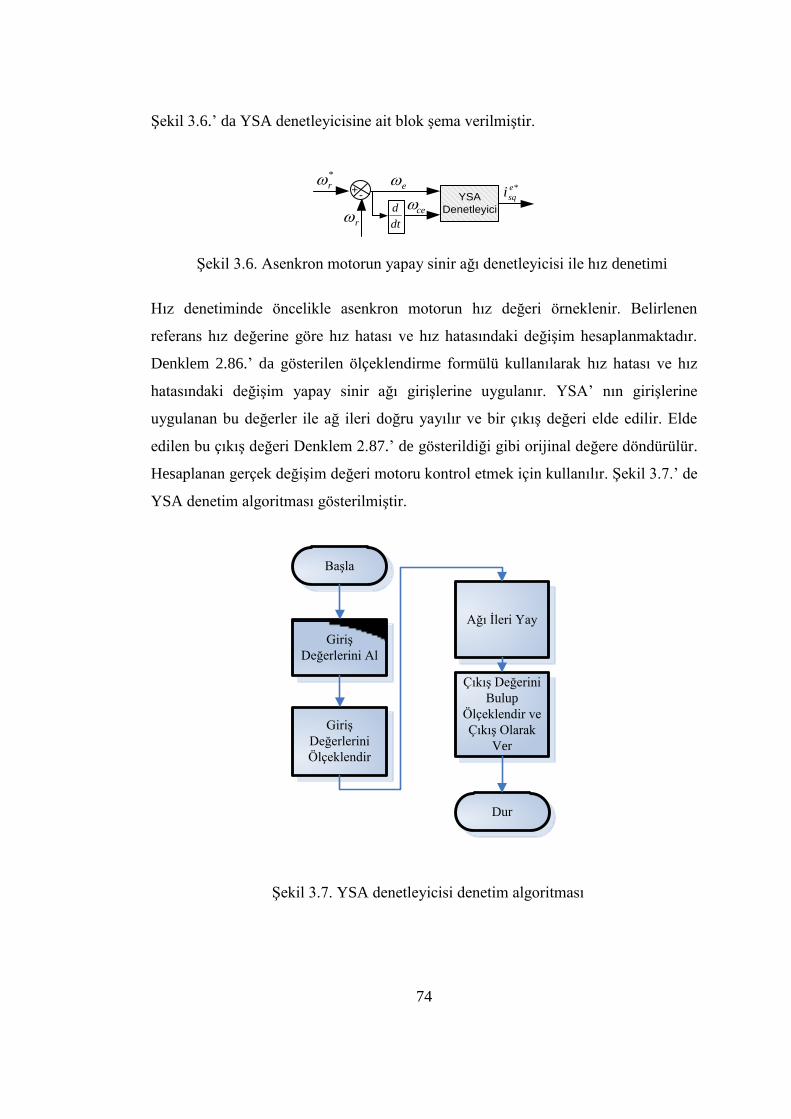
74
Şekil 3.6.‟ da YSA denetleyicisine ait blok şema verilmiştir.
e
r
*
rYSA
Denetleyici
+-
*e
sqi
dt
d ce
43Şekil 3.6. Asenkron motorun yapay sinir ağı denetleyicisi ile hız denetimi
Hız denetiminde öncelikle asenkron motorun hız değeri örneklenir. Belirlenen
referans hız değerine göre hız hatası ve hız hatasındaki değişim hesaplanmaktadır.
Denklem 2.86.‟ da gösterilen ölçeklendirme formülü kullanılarak hız hatası ve hız
hatasındaki değişim yapay sinir ağı girişlerine uygulanır. YSA‟ nın girişlerine
uygulanan bu değerler ile ağ ileri doğru yayılır ve bir çıkış değeri elde edilir. Elde
edilen bu çıkış değeri Denklem 2.87.‟ de gösterildiği gibi orijinal değere döndürülür.
Hesaplanan gerçek değişim değeri motoru kontrol etmek için kullanılır. Şekil 3.7.‟ de
YSA denetim algoritması gösterilmiştir.
Başla
Giriş
Değerlerini Al
Giriş
Değerlerini
Ölçeklendir
Ağı İleri Yay
Dur
Çıkış Değerini
Bulup
Ölçeklendir ve
Çıkış Olarak
Ver
2Şekil 3.7. YSA denetleyicisi denetim algoritması
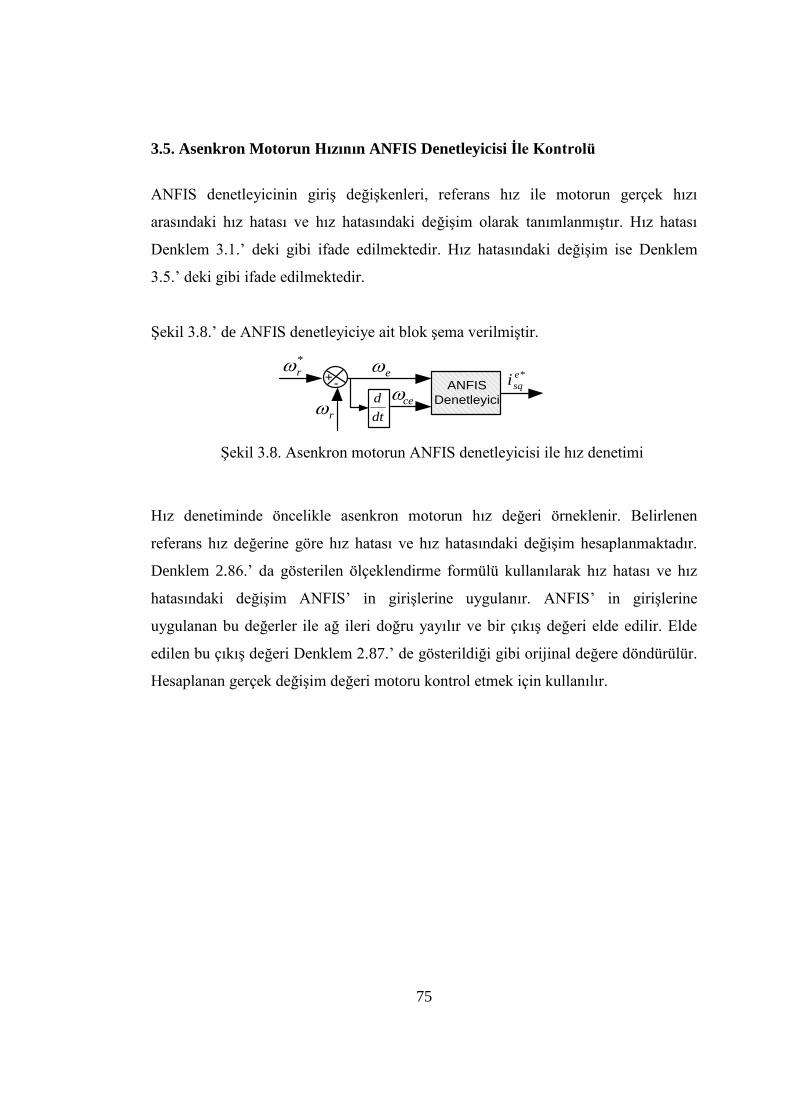
75
3.5. Asenkron Motorun Hızının ANFIS Denetleyicisi Ġle Kontrolü
ANFIS denetleyicinin giriş değişkenleri, referans hız ile motorun gerçek hızı
arasındaki hız hatası ve hız hatasındaki değişim olarak tanımlanmıştır. Hız hatası
Denklem 3.1.‟ deki gibi ifade edilmektedir. Hız hatasındaki değişim ise Denklem
3.5.‟ deki gibi ifade edilmektedir.
Şekil 3.8.‟ de ANFIS denetleyiciye ait blok şema verilmiştir.
e
r
*
rANFIS
Denetleyici
+-
*e
sqi
dt
d ce
44Şekil 3.8. Asenkron motorun ANFIS denetleyicisi ile hız denetimi
Hız denetiminde öncelikle asenkron motorun hız değeri örneklenir. Belirlenen
referans hız değerine göre hız hatası ve hız hatasındaki değişim hesaplanmaktadır.
Denklem 2.86.‟ da gösterilen ölçeklendirme formülü kullanılarak hız hatası ve hız
hatasındaki değişim ANFIS‟ in girişlerine uygulanır. ANFIS‟ in girişlerine
uygulanan bu değerler ile ağ ileri doğru yayılır ve bir çıkış değeri elde edilir. Elde
edilen bu çıkış değeri Denklem 2.87.‟ de gösterildiği gibi orijinal değere döndürülür.
Hesaplanan gerçek değişim değeri motoru kontrol etmek için kullanılır.
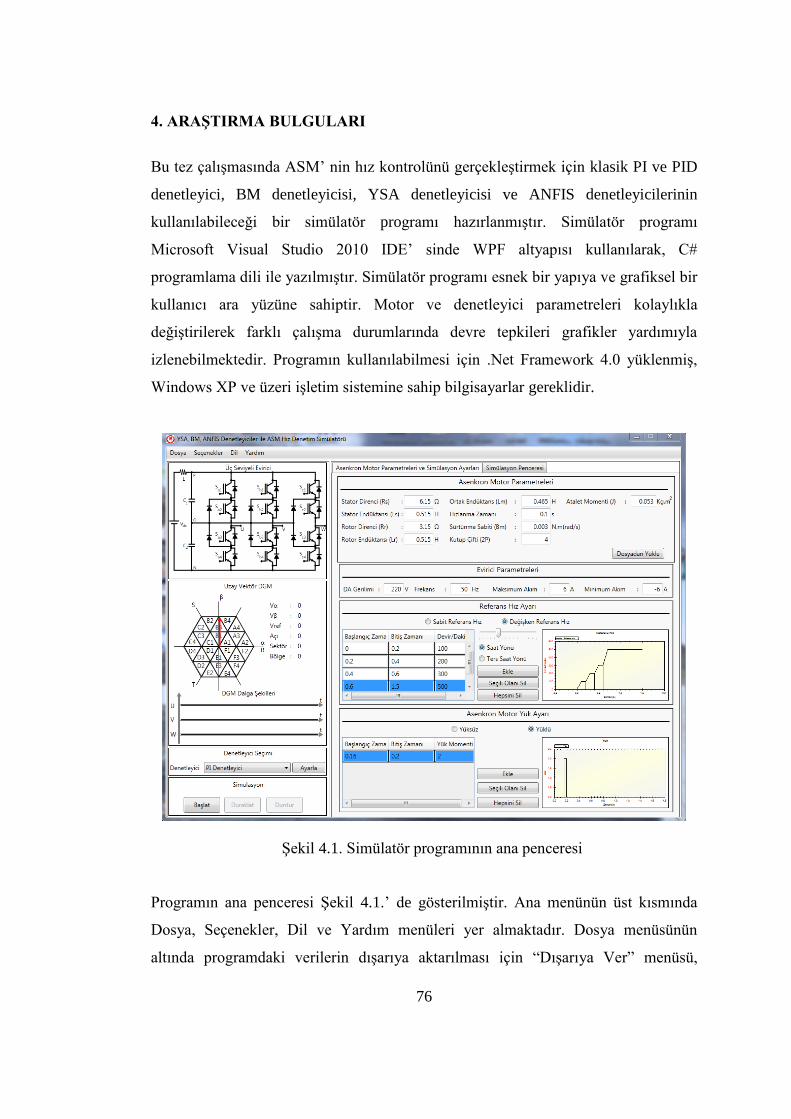
76
4. ARAġTIRMA BULGULARI
Bu tez çalışmasında ASM‟ nin hız kontrolünü gerçekleştirmek için klasik PI ve PID
denetleyici, BM denetleyicisi, YSA denetleyicisi ve ANFIS denetleyicilerinin
kullanılabileceği bir simülatör programı hazırlanmıştır. Simülatör programı
Microsoft Visual Studio 2010 IDE‟ sinde WPF altyapısı kullanılarak, C#
programlama dili ile yazılmıştır. Simülatör programı esnek bir yapıya ve grafiksel bir
kullanıcı ara yüzüne sahiptir. Motor ve denetleyici parametreleri kolaylıkla
değiştirilerek farklı çalışma durumlarında devre tepkileri grafikler yardımıyla
izlenebilmektedir. Programın kullanılabilmesi için .Net Framework 4.0 yüklenmiş,
Windows XP ve üzeri işletim sistemine sahip bilgisayarlar gereklidir.
45Şekil 4.1. Simülatör programının ana penceresi
Programın ana penceresi Şekil 4.1.‟ de gösterilmiştir. Ana menünün üst kısmında
Dosya, Seçenekler, Dil ve Yardım menüleri yer almaktadır. Dosya menüsünün
altında programdaki verilerin dışarıya aktarılması için “Dışarıya Ver” menüsü,
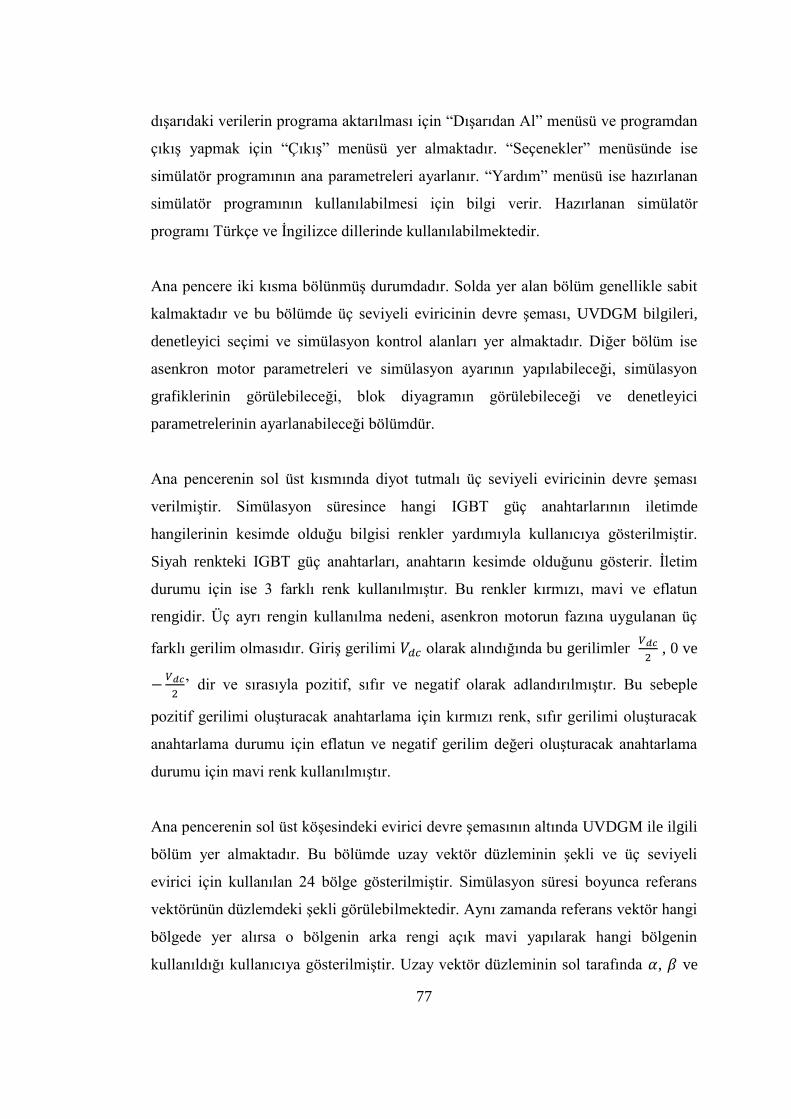
77
dışarıdaki verilerin programa aktarılması için “Dışarıdan Al” menüsü ve programdan
çıkış yapmak için “Çıkış” menüsü yer almaktadır. “Seçenekler” menüsünde ise
simülatör programının ana parametreleri ayarlanır. “Yardım” menüsü ise hazırlanan
simülatör programının kullanılabilmesi için bilgi verir. Hazırlanan simülatör
programı Türkçe ve İngilizce dillerinde kullanılabilmektedir.
Ana pencere iki kısma bölünmüş durumdadır. Solda yer alan bölüm genellikle sabit
kalmaktadır ve bu bölümde üç seviyeli eviricinin devre şeması, UVDGM bilgileri,
denetleyici seçimi ve simülasyon kontrol alanları yer almaktadır. Diğer bölüm ise
asenkron motor parametreleri ve simülasyon ayarının yapılabileceği, simülasyon
grafiklerinin görülebileceği, blok diyagramın görülebileceği ve denetleyici
parametrelerinin ayarlanabileceği bölümdür.
Ana pencerenin sol üst kısmında diyot tutmalı üç seviyeli eviricinin devre şeması
verilmiştir. Simülasyon süresince hangi IGBT güç anahtarlarının iletimde
hangilerinin kesimde olduğu bilgisi renkler yardımıyla kullanıcıya gösterilmiştir.
Siyah renkteki IGBT güç anahtarları, anahtarın kesimde olduğunu gösterir. İletim
durumu için ise 3 farklı renk kullanılmıştır. Bu renkler kırmızı, mavi ve eflatun
rengidir. Üç ayrı rengin kullanılma nedeni, asenkron motorun fazına uygulanan üç
farklı gerilim olmasıdır. Giriş gerilimi olarak alındığında bu gerilimler
, 0 ve
‟ dir ve sırasıyla pozitif, sıfır ve negatif olarak adlandırılmıştır. Bu sebeple
pozitif gerilimi oluşturacak anahtarlama için kırmızı renk, sıfır gerilimi oluşturacak
anahtarlama durumu için eflatun ve negatif gerilim değeri oluşturacak anahtarlama
durumu için mavi renk kullanılmıştır.
Ana pencerenin sol üst köşesindeki evirici devre şemasının altında UVDGM ile ilgili
bölüm yer almaktadır. Bu bölümde uzay vektör düzleminin şekli ve üç seviyeli
evirici için kullanılan 24 bölge gösterilmiştir. Simülasyon süresi boyunca referans
vektörünün düzlemdeki şekli görülebilmektedir. Aynı zamanda referans vektör hangi
bölgede yer alırsa o bölgenin arka rengi açık mavi yapılarak hangi bölgenin
kullanıldığı kullanıcıya gösterilmiştir. Uzay vektör düzleminin sol tarafında , ve

78
referans vektörlerinin değerlerinin yanında, referans vektörün açısı, hangi sektörde
olduğu ve hangi bölgede yer aldığı bilgileri de kullanıcıya gösterilmiştir. Bu
bölümün alt kısmında ise DGM dalga şekilleri yer almaktadır. Burada gösterilen
dalga şekilleri üç seviyeden oluşmaktadır ve pozitif, sıfır ve negatif olarak
adlandırılırlar. Her bir faz için çıkış sinyalleri eviricide yer alan IGBT güç
anahtarlarını kontrol ettiği için renklendirme de bu durum göz önüne alınarak
yapılmıştır. Eviricide kullanılan renkler gibi pozitif gerilim seviyesi için kırmızı, sıfır
gerilim seviyesi için eflatun ve negatif gerilim seviyesi için mavi renk kullanılmıştır.
Her bir faz için çıkış sinyalleri örnekleme periyodu içerisinde eviriciye uygulanır.
UVDGM bölümünün alt kısmında denetleyici seçim menüsü yer almaktadır. Bu
bölümdeki açılır listeden PI, PID, BM, YSA ve ANFIS denetleyicileri seçilebilir.
Denetleyicinin parametre ayarları “Ayarla” tuşu yardımıyla gerçekleştirilir. PI ve
PID denetleyiciler için parametre ayar penceresi Şekil 4.2.‟ de gösterilmiştir. Diğer
denetleyici türleri seçildiğinde ise yeni bir tab penceresi açılarak, seçilen denetleyici
ile ilgili parametrelerin ayarlanabileceği bölümler gösterilir.
46Şekil 4.2. PI ve PID denetleyici parametre ayarlama pencereleri
Sol bölümün en alt kısmında ise simülasyonun başlatılıp, duraklatılabileceği ve
durdurulabileceği tuşlar mevcuttur.
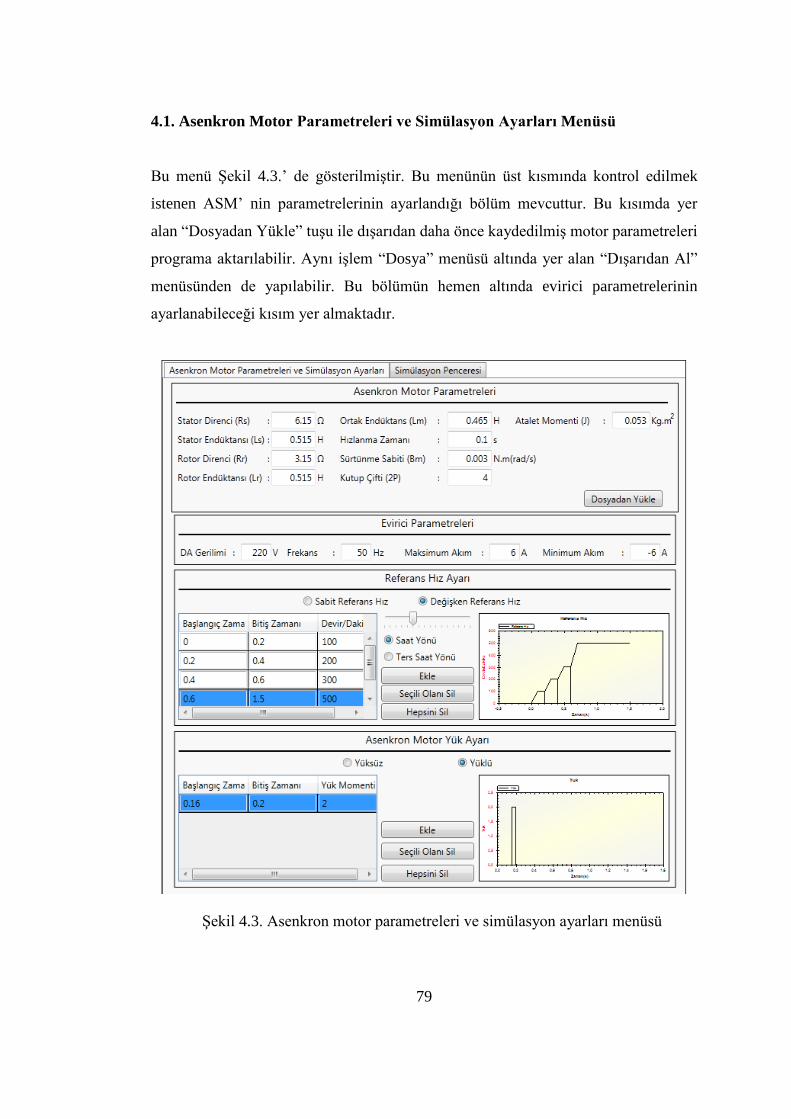
79
4.1. Asenkron Motor Parametreleri ve Simülasyon Ayarları Menüsü
Bu menü Şekil 4.3.‟ de gösterilmiştir. Bu menünün üst kısmında kontrol edilmek
istenen ASM‟ nin parametrelerinin ayarlandığı bölüm mevcuttur. Bu kısımda yer
alan “Dosyadan Yükle” tuşu ile dışarıdan daha önce kaydedilmiş motor parametreleri
programa aktarılabilir. Aynı işlem “Dosya” menüsü altında yer alan “Dışarıdan Al”
menüsünden de yapılabilir. Bu bölümün hemen altında evirici parametrelerinin
ayarlanabileceği kısım yer almaktadır.
47Şekil 4.3. Asenkron motor parametreleri ve simülasyon ayarları menüsü
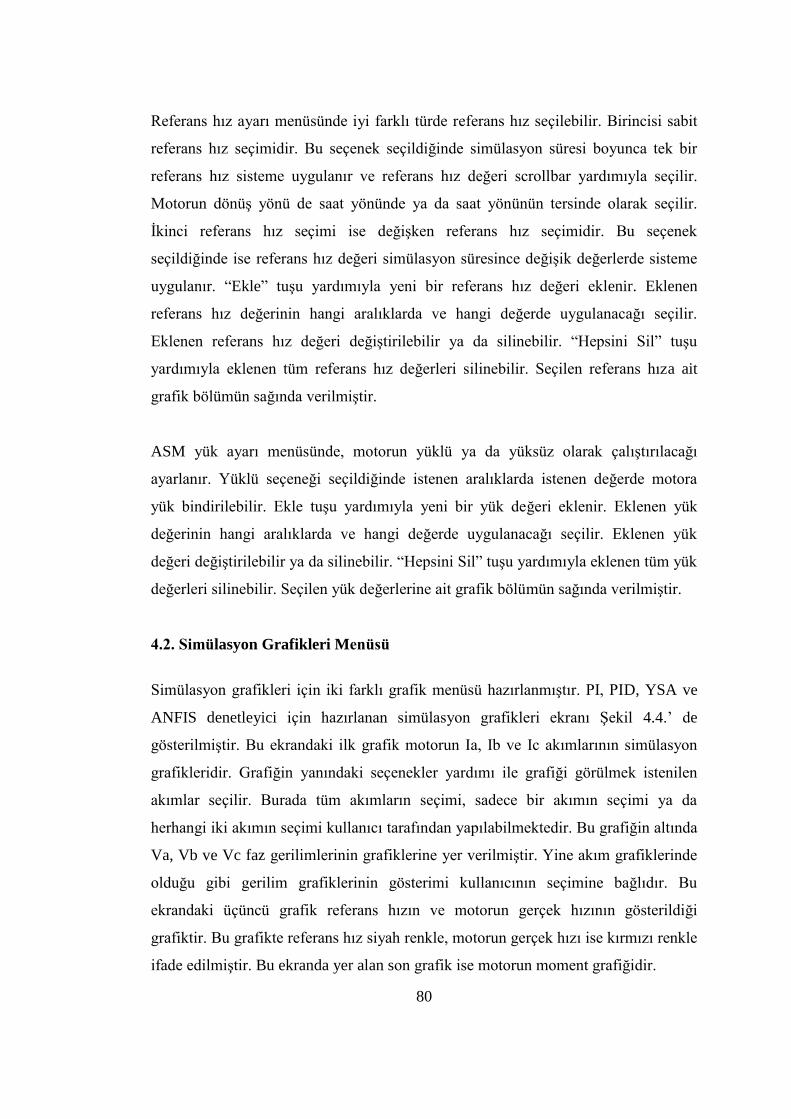
80
Referans hız ayarı menüsünde iyi farklı türde referans hız seçilebilir. Birincisi sabit
referans hız seçimidir. Bu seçenek seçildiğinde simülasyon süresi boyunca tek bir
referans hız sisteme uygulanır ve referans hız değeri scrollbar yardımıyla seçilir.
Motorun dönüş yönü de saat yönünde ya da saat yönünün tersinde olarak seçilir.
İkinci referans hız seçimi ise değişken referans hız seçimidir. Bu seçenek
seçildiğinde ise referans hız değeri simülasyon süresince değişik değerlerde sisteme
uygulanır. “Ekle” tuşu yardımıyla yeni bir referans hız değeri eklenir. Eklenen
referans hız değerinin hangi aralıklarda ve hangi değerde uygulanacağı seçilir.
Eklenen referans hız değeri değiştirilebilir ya da silinebilir. “Hepsini Sil” tuşu
yardımıyla eklenen tüm referans hız değerleri silinebilir. Seçilen referans hıza ait
grafik bölümün sağında verilmiştir.
ASM yük ayarı menüsünde, motorun yüklü ya da yüksüz olarak çalıştırılacağı
ayarlanır. Yüklü seçeneği seçildiğinde istenen aralıklarda istenen değerde motora
yük bindirilebilir. Ekle tuşu yardımıyla yeni bir yük değeri eklenir. Eklenen yük
değerinin hangi aralıklarda ve hangi değerde uygulanacağı seçilir. Eklenen yük
değeri değiştirilebilir ya da silinebilir. “Hepsini Sil” tuşu yardımıyla eklenen tüm yük
değerleri silinebilir. Seçilen yük değerlerine ait grafik bölümün sağında verilmiştir.
4.2. Simülasyon Grafikleri Menüsü
Simülasyon grafikleri için iki farklı grafik menüsü hazırlanmıştır. PI, PID, YSA ve
ANFIS denetleyici için hazırlanan simülasyon grafikleri ekranı Şekil 4.4.‟ de
gösterilmiştir. Bu ekrandaki ilk grafik motorun Ia, Ib ve Ic akımlarının simülasyon
grafikleridir. Grafiğin yanındaki seçenekler yardımı ile grafiği görülmek istenilen
akımlar seçilir. Burada tüm akımların seçimi, sadece bir akımın seçimi ya da
herhangi iki akımın seçimi kullanıcı tarafından yapılabilmektedir. Bu grafiğin altında
Va, Vb ve Vc faz gerilimlerinin grafiklerine yer verilmiştir. Yine akım grafiklerinde
olduğu gibi gerilim grafiklerinin gösterimi kullanıcının seçimine bağlıdır. Bu
ekrandaki üçüncü grafik referans hızın ve motorun gerçek hızının gösterildiği
grafiktir. Bu grafikte referans hız siyah renkle, motorun gerçek hızı ise kırmızı renkle
ifade edilmiştir. Bu ekranda yer alan son grafik ise motorun moment grafiğidir.
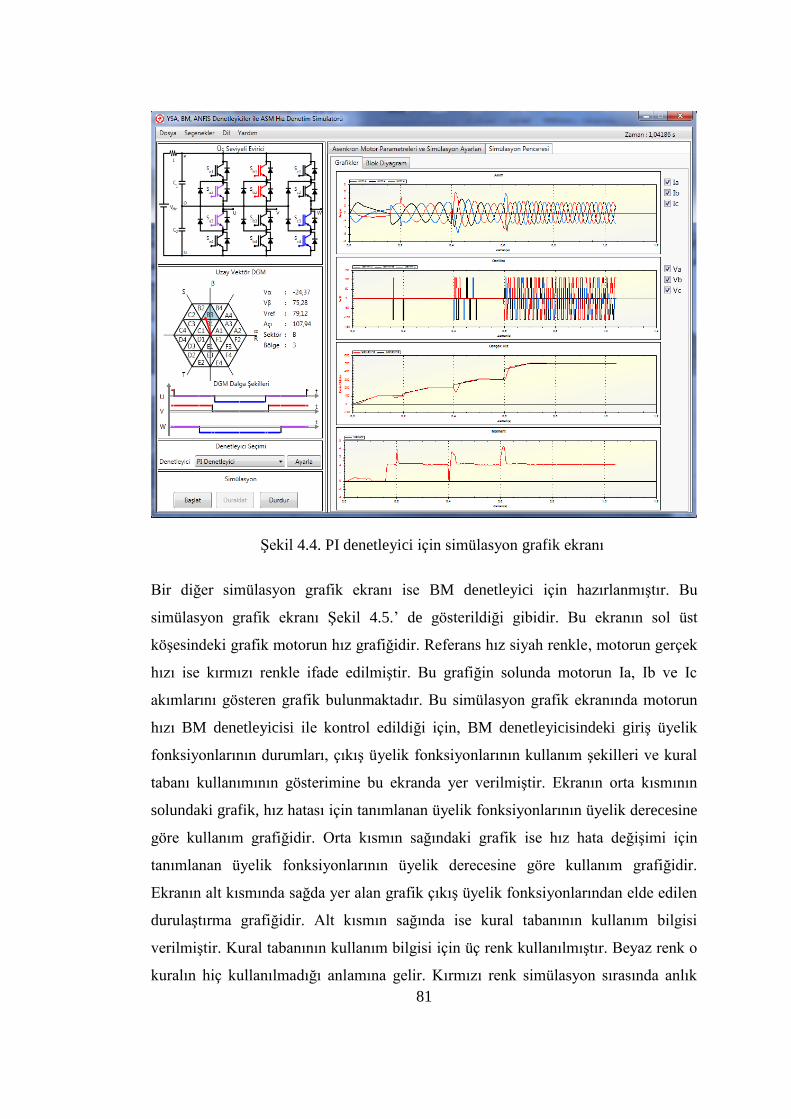
81
48Şekil 4.4. PI denetleyici için simülasyon grafik ekranı
Bir diğer simülasyon grafik ekranı ise BM denetleyici için hazırlanmıştır. Bu
simülasyon grafik ekranı Şekil 4.5.‟ de gösterildiği gibidir. Bu ekranın sol üst
köşesindeki grafik motorun hız grafiğidir. Referans hız siyah renkle, motorun gerçek
hızı ise kırmızı renkle ifade edilmiştir. Bu grafiğin solunda motorun Ia, Ib ve Ic
akımlarını gösteren grafik bulunmaktadır. Bu simülasyon grafik ekranında motorun
hızı BM denetleyicisi ile kontrol edildiği için, BM denetleyicisindeki giriş üyelik
fonksiyonlarının durumları, çıkış üyelik fonksiyonlarının kullanım şekilleri ve kural
tabanı kullanımının gösterimine bu ekranda yer verilmiştir. Ekranın orta kısmının
solundaki grafik, hız hatası için tanımlanan üyelik fonksiyonlarının üyelik derecesine
göre kullanım grafiğidir. Orta kısmın sağındaki grafik ise hız hata değişimi için
tanımlanan üyelik fonksiyonlarının üyelik derecesine göre kullanım grafiğidir.
Ekranın alt kısmında sağda yer alan grafik çıkış üyelik fonksiyonlarından elde edilen
durulaştırma grafiğidir. Alt kısmın sağında ise kural tabanının kullanım bilgisi
verilmiştir. Kural tabanının kullanım bilgisi için üç renk kullanılmıştır. Beyaz renk o
kuralın hiç kullanılmadığı anlamına gelir. Kırmızı renk simülasyon sırasında anlık
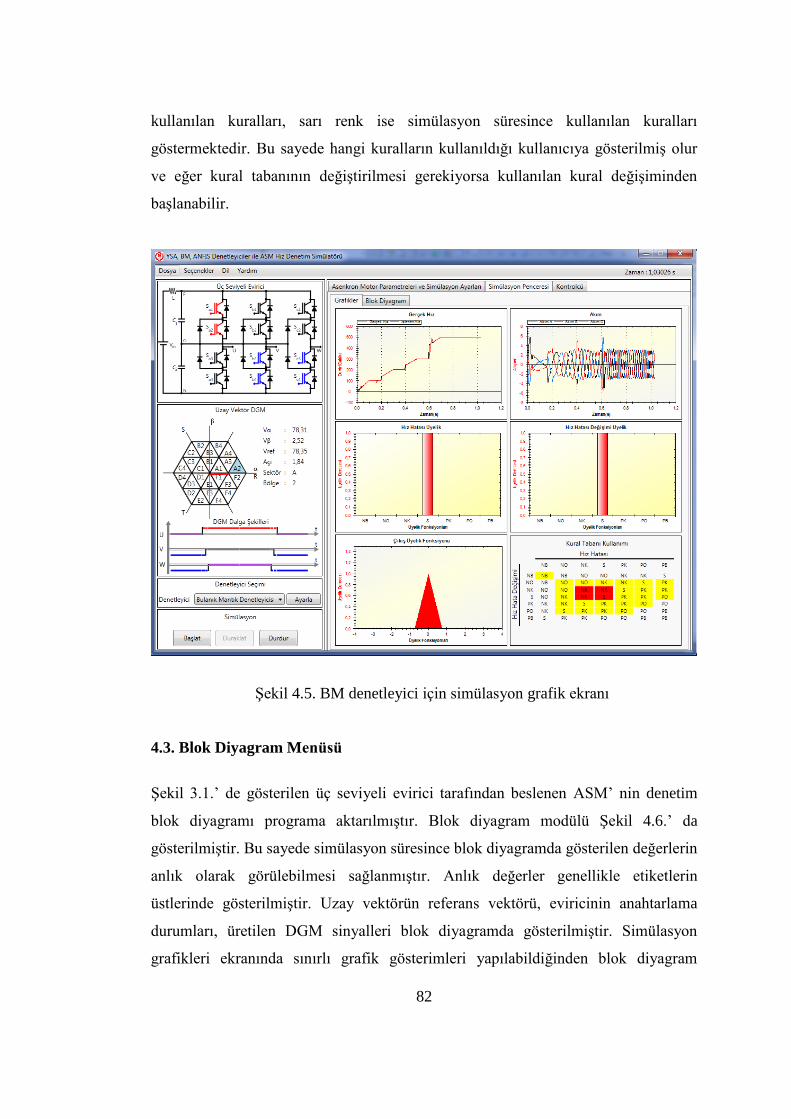
82
kullanılan kuralları, sarı renk ise simülasyon süresince kullanılan kuralları
göstermektedir. Bu sayede hangi kuralların kullanıldığı kullanıcıya gösterilmiş olur
ve eğer kural tabanının değiştirilmesi gerekiyorsa kullanılan kural değişiminden
başlanabilir.
49Şekil 4.5. BM denetleyici için simülasyon grafik ekranı
4.3. Blok Diyagram Menüsü
Şekil 3.1.‟ de gösterilen üç seviyeli evirici tarafından beslenen ASM‟ nin denetim
blok diyagramı programa aktarılmıştır. Blok diyagram modülü Şekil 4.6.‟ da
gösterilmiştir. Bu sayede simülasyon süresince blok diyagramda gösterilen değerlerin
anlık olarak görülebilmesi sağlanmıştır. Anlık değerler genellikle etiketlerin
üstlerinde gösterilmiştir. Uzay vektörün referans vektörü, eviricinin anahtarlama
durumları, üretilen DGM sinyalleri blok diyagramda gösterilmiştir. Simülasyon
grafikleri ekranında sınırlı grafik gösterimleri yapılabildiğinden blok diyagram
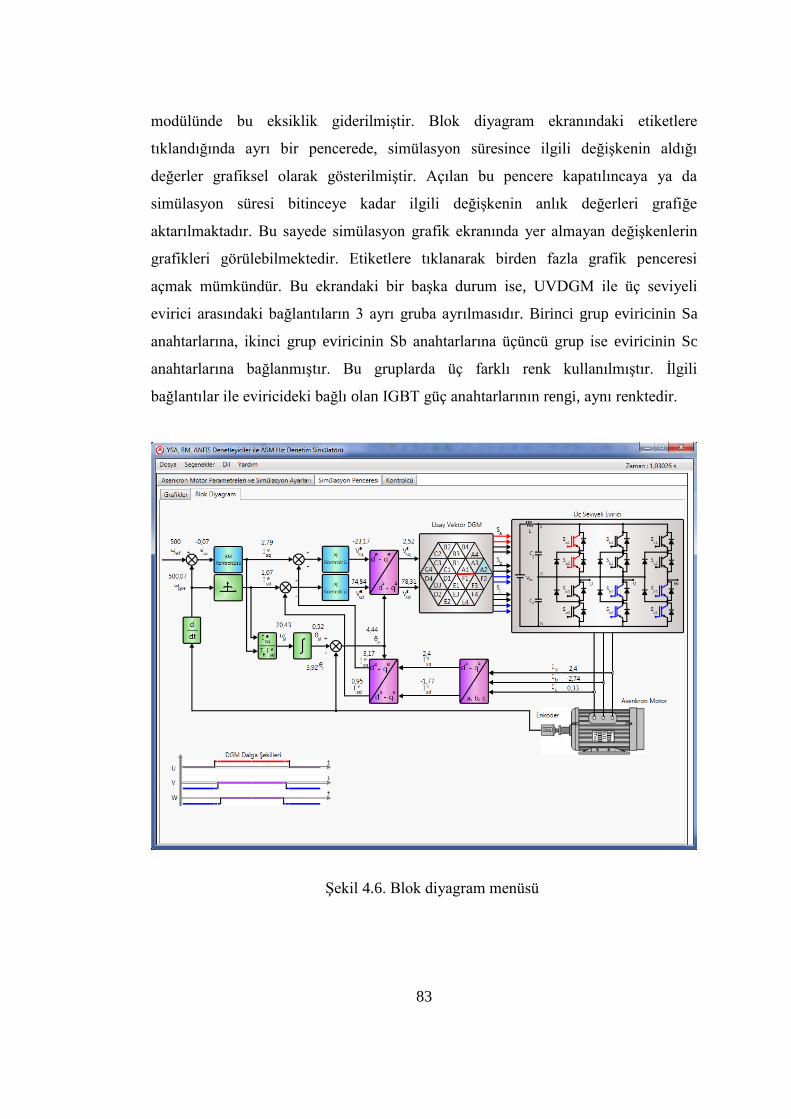
83
modülünde bu eksiklik giderilmiştir. Blok diyagram ekranındaki etiketlere
tıklandığında ayrı bir pencerede, simülasyon süresince ilgili değişkenin aldığı
değerler grafiksel olarak gösterilmiştir. Açılan bu pencere kapatılıncaya ya da
simülasyon süresi bitinceye kadar ilgili değişkenin anlık değerleri grafiğe
aktarılmaktadır. Bu sayede simülasyon grafik ekranında yer almayan değişkenlerin
grafikleri görülebilmektedir. Etiketlere tıklanarak birden fazla grafik penceresi
açmak mümkündür. Bu ekrandaki bir başka durum ise, UVDGM ile üç seviyeli
evirici arasındaki bağlantıların 3 ayrı gruba ayrılmasıdır. Birinci grup eviricinin Sa
anahtarlarına, ikinci grup eviricinin Sb anahtarlarına üçüncü grup ise eviricinin Sc
anahtarlarına bağlanmıştır. Bu gruplarda üç farklı renk kullanılmıştır. İlgili
bağlantılar ile eviricideki bağlı olan IGBT güç anahtarlarının rengi, aynı renktedir.
50Şekil 4.6. Blok diyagram menüsü
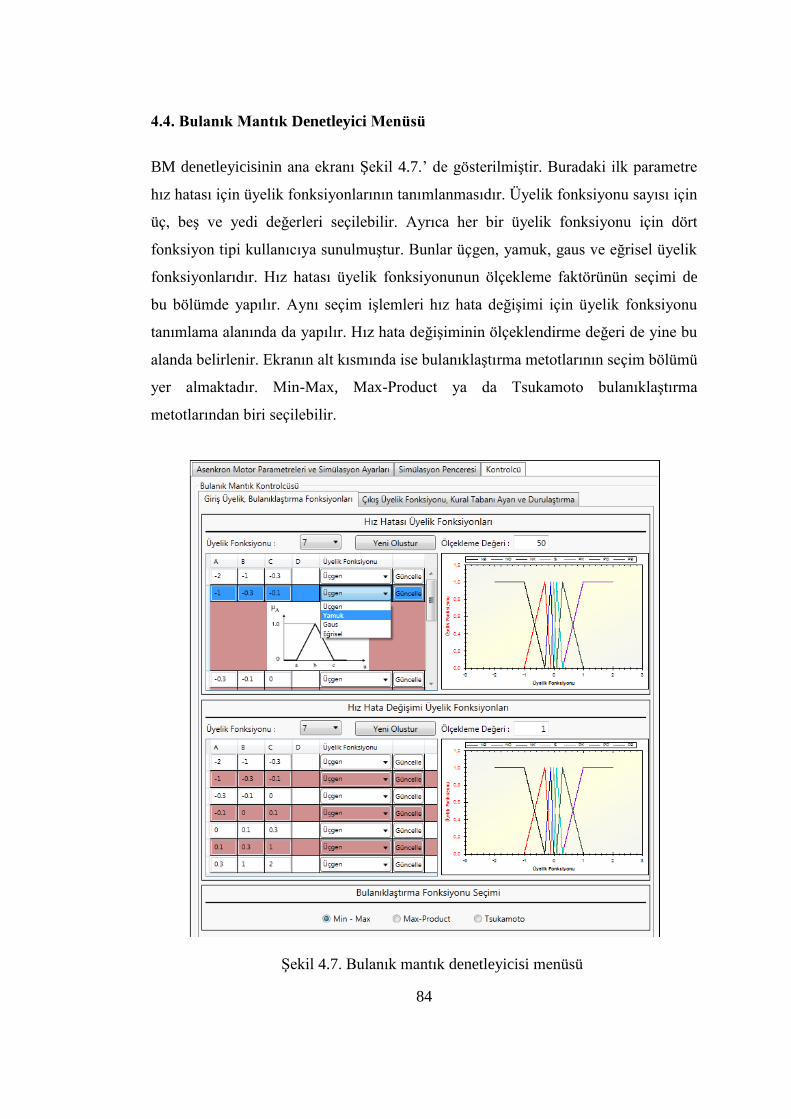
84
4.4. Bulanık Mantık Denetleyici Menüsü
BM denetleyicisinin ana ekranı Şekil 4.7.‟ de gösterilmiştir. Buradaki ilk parametre
hız hatası için üyelik fonksiyonlarının tanımlanmasıdır. Üyelik fonksiyonu sayısı için
üç, beş ve yedi değerleri seçilebilir. Ayrıca her bir üyelik fonksiyonu için dört
fonksiyon tipi kullanıcıya sunulmuştur. Bunlar üçgen, yamuk, gaus ve eğrisel üyelik
fonksiyonlarıdır. Hız hatası üyelik fonksiyonunun ölçekleme faktörünün seçimi de
bu bölümde yapılır. Aynı seçim işlemleri hız hata değişimi için üyelik fonksiyonu
tanımlama alanında da yapılır. Hız hata değişiminin ölçeklendirme değeri de yine bu
alanda belirlenir. Ekranın alt kısmında ise bulanıklaştırma metotlarının seçim bölümü
yer almaktadır. Min-Max, Max-Product ya da Tsukamoto bulanıklaştırma
metotlarından biri seçilebilir.
51Şekil 4.7. Bulanık mantık denetleyicisi menüsü
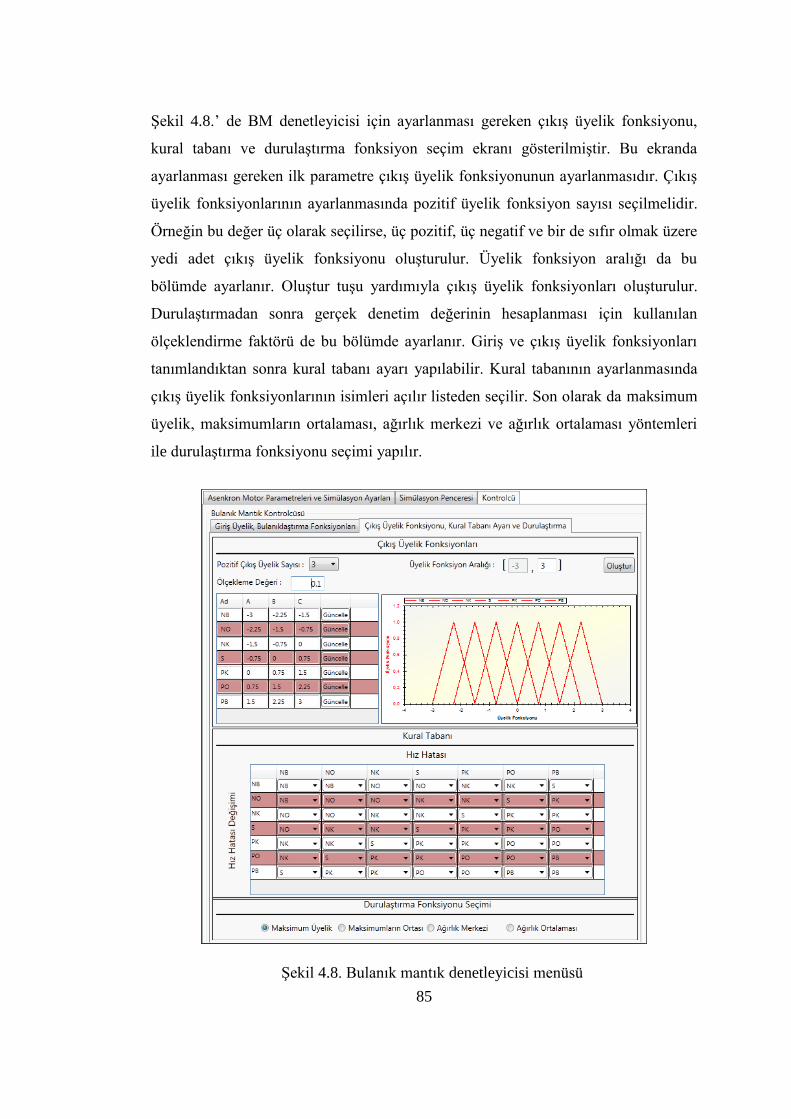
85
Şekil 4.8.‟ de BM denetleyicisi için ayarlanması gereken çıkış üyelik fonksiyonu,
kural tabanı ve durulaştırma fonksiyon seçim ekranı gösterilmiştir. Bu ekranda
ayarlanması gereken ilk parametre çıkış üyelik fonksiyonunun ayarlanmasıdır. Çıkış
üyelik fonksiyonlarının ayarlanmasında pozitif üyelik fonksiyon sayısı seçilmelidir.
Örneğin bu değer üç olarak seçilirse, üç pozitif, üç negatif ve bir de sıfır olmak üzere
yedi adet çıkış üyelik fonksiyonu oluşturulur. Üyelik fonksiyon aralığı da bu
bölümde ayarlanır. Oluştur tuşu yardımıyla çıkış üyelik fonksiyonları oluşturulur.
Durulaştırmadan sonra gerçek denetim değerinin hesaplanması için kullanılan
ölçeklendirme faktörü de bu bölümde ayarlanır. Giriş ve çıkış üyelik fonksiyonları
tanımlandıktan sonra kural tabanı ayarı yapılabilir. Kural tabanının ayarlanmasında
çıkış üyelik fonksiyonlarının isimleri açılır listeden seçilir. Son olarak da maksimum
üyelik, maksimumların ortalaması, ağırlık merkezi ve ağırlık ortalaması yöntemleri
ile durulaştırma fonksiyonu seçimi yapılır.
52Şekil 4.8. Bulanık mantık denetleyicisi menüsü
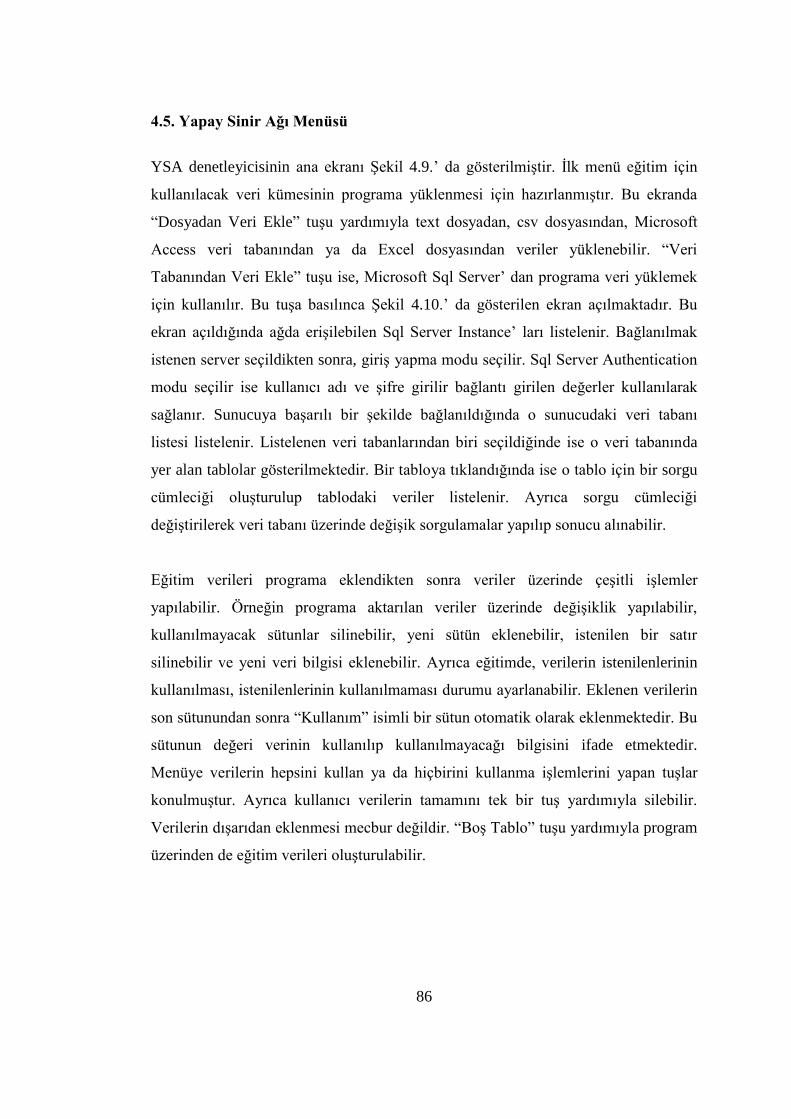
86
4.5. Yapay Sinir Ağı Menüsü
YSA denetleyicisinin ana ekranı Şekil 4.9.‟ da gösterilmiştir. İlk menü eğitim için
kullanılacak veri kümesinin programa yüklenmesi için hazırlanmıştır. Bu ekranda
“Dosyadan Veri Ekle” tuşu yardımıyla text dosyadan, csv dosyasından, Microsoft
Access veri tabanından ya da Excel dosyasından veriler yüklenebilir. “Veri
Tabanından Veri Ekle” tuşu ise, Microsoft Sql Server‟ dan programa veri yüklemek
için kullanılır. Bu tuşa basılınca Şekil 4.10.‟ da gösterilen ekran açılmaktadır. Bu
ekran açıldığında ağda erişilebilen Sql Server Instance‟ ları listelenir. Bağlanılmak
istenen server seçildikten sonra, giriş yapma modu seçilir. Sql Server Authentication
modu seçilir ise kullanıcı adı ve şifre girilir bağlantı girilen değerler kullanılarak
sağlanır. Sunucuya başarılı bir şekilde bağlanıldığında o sunucudaki veri tabanı
listesi listelenir. Listelenen veri tabanlarından biri seçildiğinde ise o veri tabanında
yer alan tablolar gösterilmektedir. Bir tabloya tıklandığında ise o tablo için bir sorgu
cümleciği oluşturulup tablodaki veriler listelenir. Ayrıca sorgu cümleciği
değiştirilerek veri tabanı üzerinde değişik sorgulamalar yapılıp sonucu alınabilir.
Eğitim verileri programa eklendikten sonra veriler üzerinde çeşitli işlemler
yapılabilir. Örneğin programa aktarılan veriler üzerinde değişiklik yapılabilir,
kullanılmayacak sütunlar silinebilir, yeni sütün eklenebilir, istenilen bir satır
silinebilir ve yeni veri bilgisi eklenebilir. Ayrıca eğitimde, verilerin istenilenlerinin
kullanılması, istenilenlerinin kullanılmaması durumu ayarlanabilir. Eklenen verilerin
son sütunundan sonra “Kullanım” isimli bir sütun otomatik olarak eklenmektedir. Bu
sütunun değeri verinin kullanılıp kullanılmayacağı bilgisini ifade etmektedir.
Menüye verilerin hepsini kullan ya da hiçbirini kullanma işlemlerini yapan tuşlar
konulmuştur. Ayrıca kullanıcı verilerin tamamını tek bir tuş yardımıyla silebilir.
Verilerin dışarıdan eklenmesi mecbur değildir. “Boş Tablo” tuşu yardımıyla program
üzerinden de eğitim verileri oluşturulabilir.
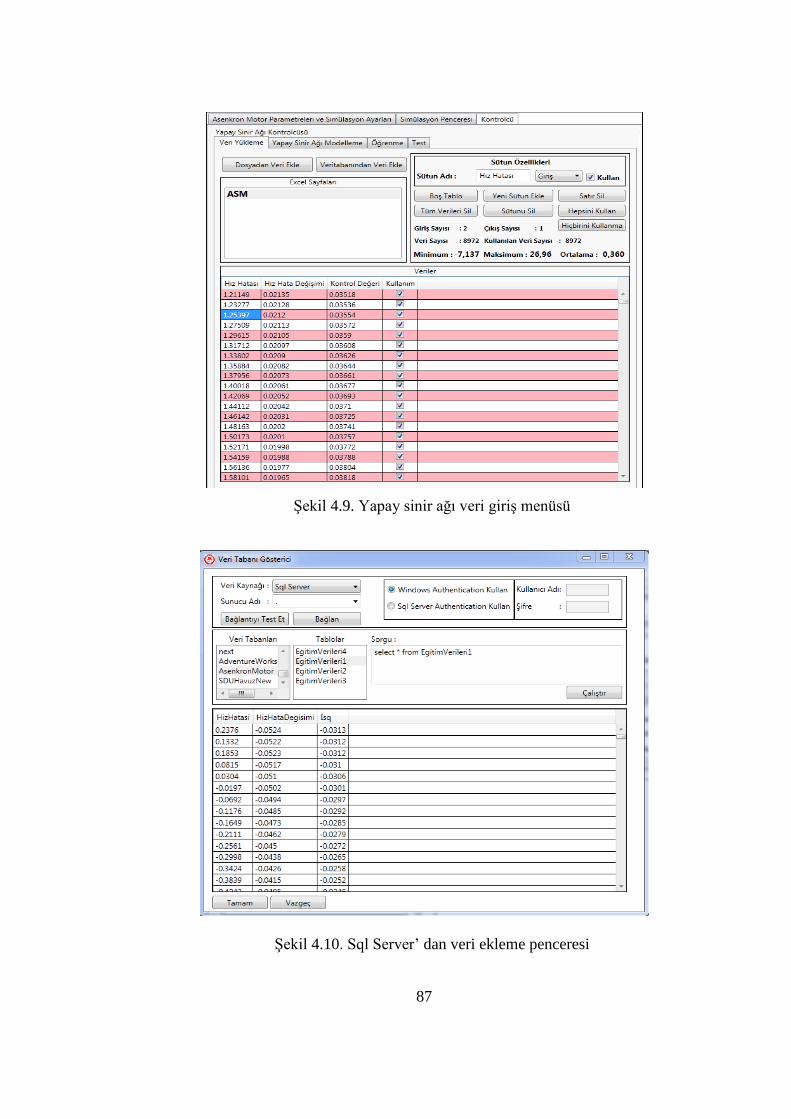
87
53Şekil 4.9. Yapay sinir ağı veri giriş menüsü
54Şekil 4.10. Sql Server‟ dan veri ekleme penceresi
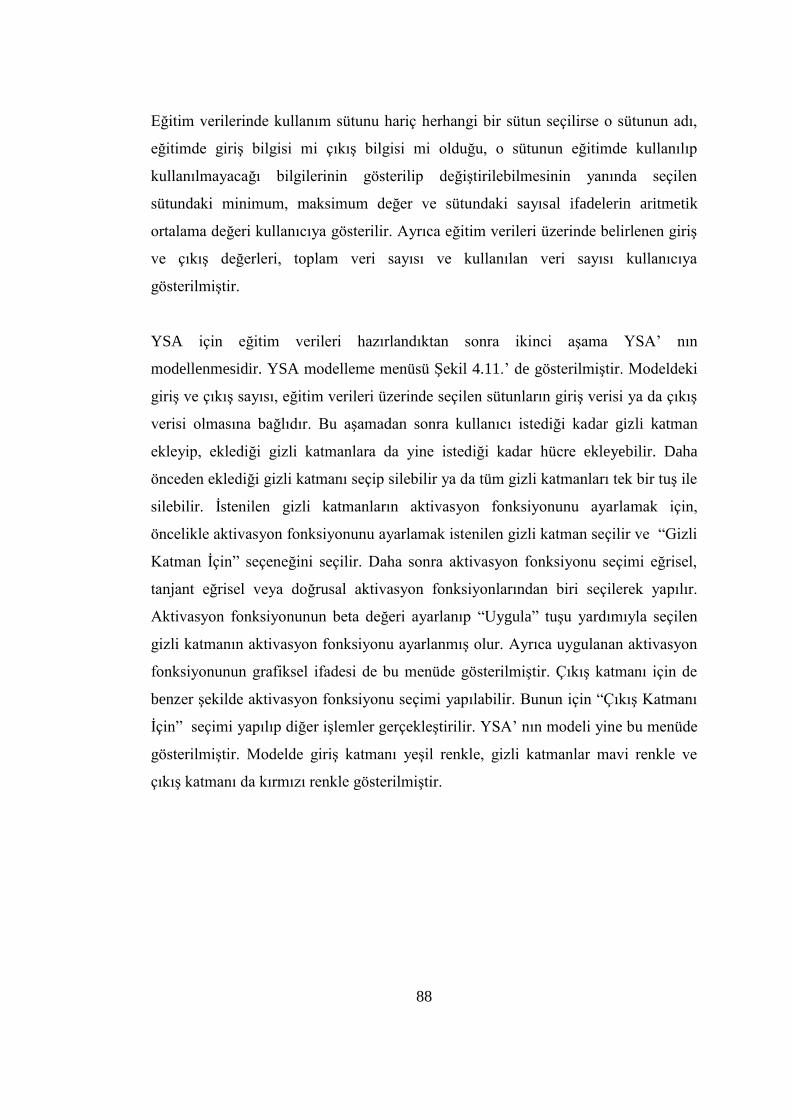
88
Eğitim verilerinde kullanım sütunu hariç herhangi bir sütun seçilirse o sütunun adı,
eğitimde giriş bilgisi mi çıkış bilgisi mi olduğu, o sütunun eğitimde kullanılıp
kullanılmayacağı bilgilerinin gösterilip değiştirilebilmesinin yanında seçilen
sütundaki minimum, maksimum değer ve sütundaki sayısal ifadelerin aritmetik
ortalama değeri kullanıcıya gösterilir. Ayrıca eğitim verileri üzerinde belirlenen giriş
ve çıkış değerleri, toplam veri sayısı ve kullanılan veri sayısı kullanıcıya
gösterilmiştir.
YSA için eğitim verileri hazırlandıktan sonra ikinci aşama YSA‟ nın
modellenmesidir. YSA modelleme menüsü Şekil 4.11.‟ de gösterilmiştir. Modeldeki
giriş ve çıkış sayısı, eğitim verileri üzerinde seçilen sütunların giriş verisi ya da çıkış
verisi olmasına bağlıdır. Bu aşamadan sonra kullanıcı istediği kadar gizli katman
ekleyip, eklediği gizli katmanlara da yine istediği kadar hücre ekleyebilir. Daha
önceden eklediği gizli katmanı seçip silebilir ya da tüm gizli katmanları tek bir tuş ile
silebilir. İstenilen gizli katmanların aktivasyon fonksiyonunu ayarlamak için,
öncelikle aktivasyon fonksiyonunu ayarlamak istenilen gizli katman seçilir ve “Gizli
Katman İçin” seçeneğini seçilir. Daha sonra aktivasyon fonksiyonu seçimi eğrisel,
tanjant eğrisel veya doğrusal aktivasyon fonksiyonlarından biri seçilerek yapılır.
Aktivasyon fonksiyonunun beta değeri ayarlanıp “Uygula” tuşu yardımıyla seçilen
gizli katmanın aktivasyon fonksiyonu ayarlanmış olur. Ayrıca uygulanan aktivasyon
fonksiyonunun grafiksel ifadesi de bu menüde gösterilmiştir. Çıkış katmanı için de
benzer şekilde aktivasyon fonksiyonu seçimi yapılabilir. Bunun için “Çıkış Katmanı
İçin” seçimi yapılıp diğer işlemler gerçekleştirilir. YSA‟ nın modeli yine bu menüde
gösterilmiştir. Modelde giriş katmanı yeşil renkle, gizli katmanlar mavi renkle ve
çıkış katmanı da kırmızı renkle gösterilmiştir.
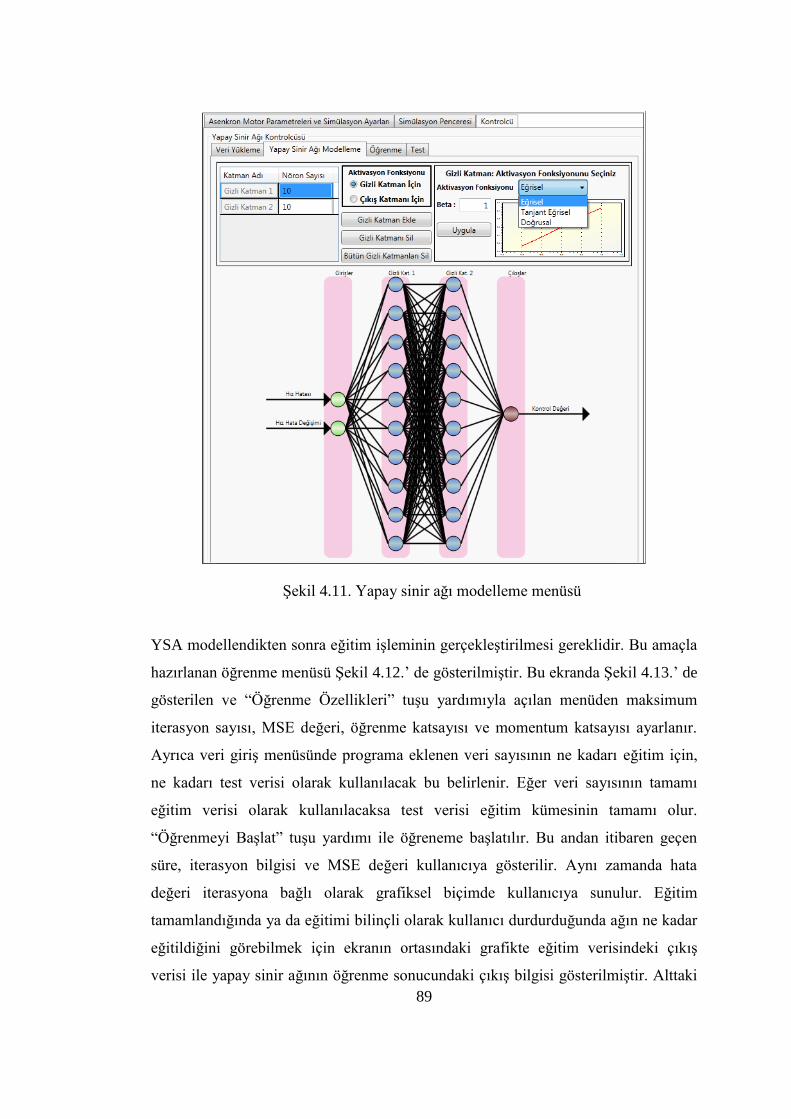
89
55Şekil 4.11. Yapay sinir ağı modelleme menüsü
YSA modellendikten sonra eğitim işleminin gerçekleştirilmesi gereklidir. Bu amaçla
hazırlanan öğrenme menüsü Şekil 4.12.‟ de gösterilmiştir. Bu ekranda Şekil 4.13.‟ de
gösterilen ve “Öğrenme Özellikleri” tuşu yardımıyla açılan menüden maksimum
iterasyon sayısı, MSE değeri, öğrenme katsayısı ve momentum katsayısı ayarlanır.
Ayrıca veri giriş menüsünde programa eklenen veri sayısının ne kadarı eğitim için,
ne kadarı test verisi olarak kullanılacak bu belirlenir. Eğer veri sayısının tamamı
eğitim verisi olarak kullanılacaksa test verisi eğitim kümesinin tamamı olur.
“Öğrenmeyi Başlat” tuşu yardımı ile öğreneme başlatılır. Bu andan itibaren geçen
süre, iterasyon bilgisi ve MSE değeri kullanıcıya gösterilir. Aynı zamanda hata
değeri iterasyona bağlı olarak grafiksel biçimde kullanıcıya sunulur. Eğitim
tamamlandığında ya da eğitimi bilinçli olarak kullanıcı durdurduğunda ağın ne kadar
eğitildiğini görebilmek için ekranın ortasındaki grafikte eğitim verisindeki çıkış
verisi ile yapay sinir ağının öğrenme sonucundaki çıkış bilgisi gösterilmiştir. Alttaki
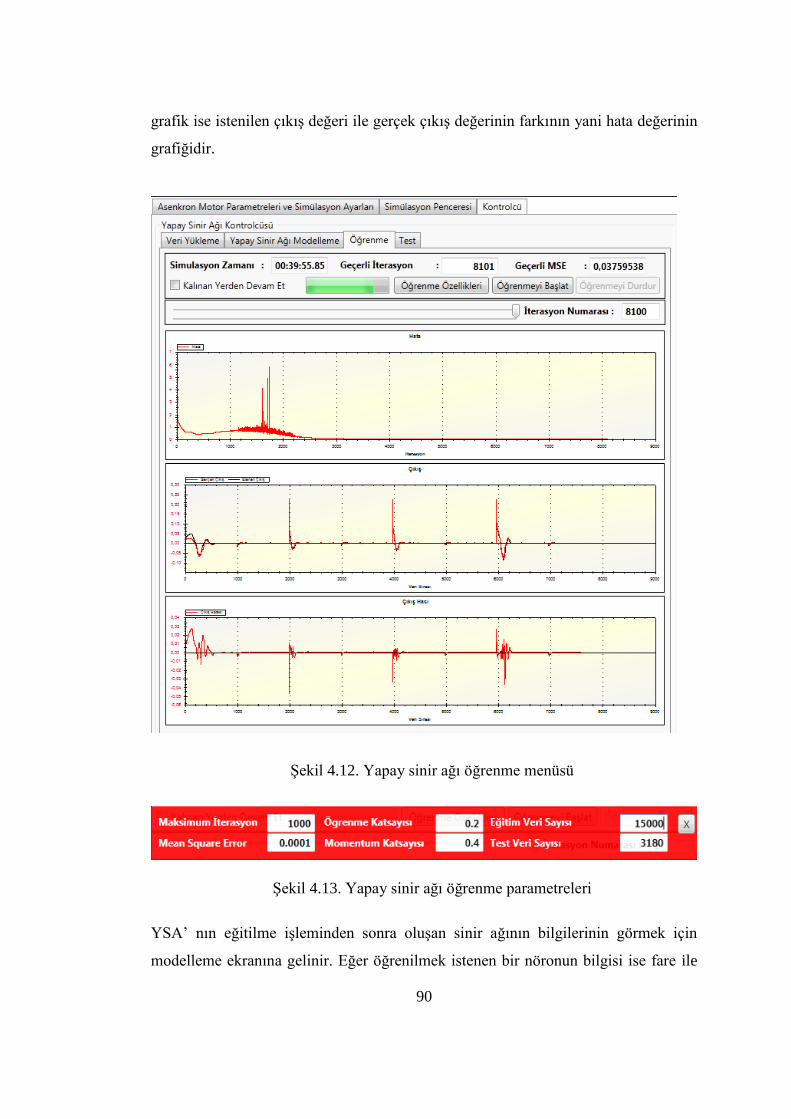
90
grafik ise istenilen çıkış değeri ile gerçek çıkış değerinin farkının yani hata değerinin
grafiğidir.
56Şekil 4.12. Yapay sinir ağı öğrenme menüsü
57Şekil 4.13. Yapay sinir ağı öğrenme parametreleri
YSA‟ nın eğitilme işleminden sonra oluşan sinir ağının bilgilerinin görmek için
modelleme ekranına gelinir. Eğer öğrenilmek istenen bir nöronun bilgisi ise fare ile
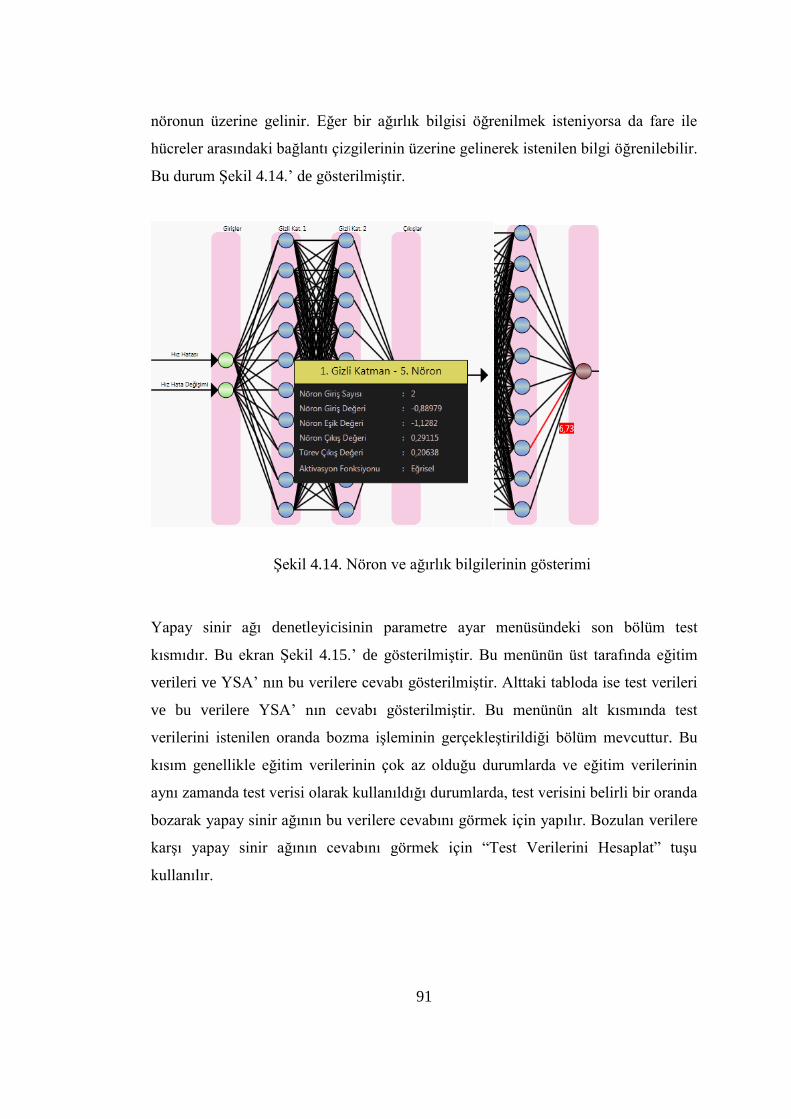
91
nöronun üzerine gelinir. Eğer bir ağırlık bilgisi öğrenilmek isteniyorsa da fare ile
hücreler arasındaki bağlantı çizgilerinin üzerine gelinerek istenilen bilgi öğrenilebilir.
Bu durum Şekil 4.14.‟ de gösterilmiştir.
58Şekil 4.14. Nöron ve ağırlık bilgilerinin gösterimi
Yapay sinir ağı denetleyicisinin parametre ayar menüsündeki son bölüm test
kısmıdır. Bu ekran Şekil 4.15.‟ de gösterilmiştir. Bu menünün üst tarafında eğitim
verileri ve YSA‟ nın bu verilere cevabı gösterilmiştir. Alttaki tabloda ise test verileri
ve bu verilere YSA‟ nın cevabı gösterilmiştir. Bu menünün alt kısmında test
verilerini istenilen oranda bozma işleminin gerçekleştirildiği bölüm mevcuttur. Bu
kısım genellikle eğitim verilerinin çok az olduğu durumlarda ve eğitim verilerinin
aynı zamanda test verisi olarak kullanıldığı durumlarda, test verisini belirli bir oranda
bozarak yapay sinir ağının bu verilere cevabını görmek için yapılır. Bozulan verilere
karşı yapay sinir ağının cevabını görmek için “Test Verilerini Hesaplat” tuşu
kullanılır.
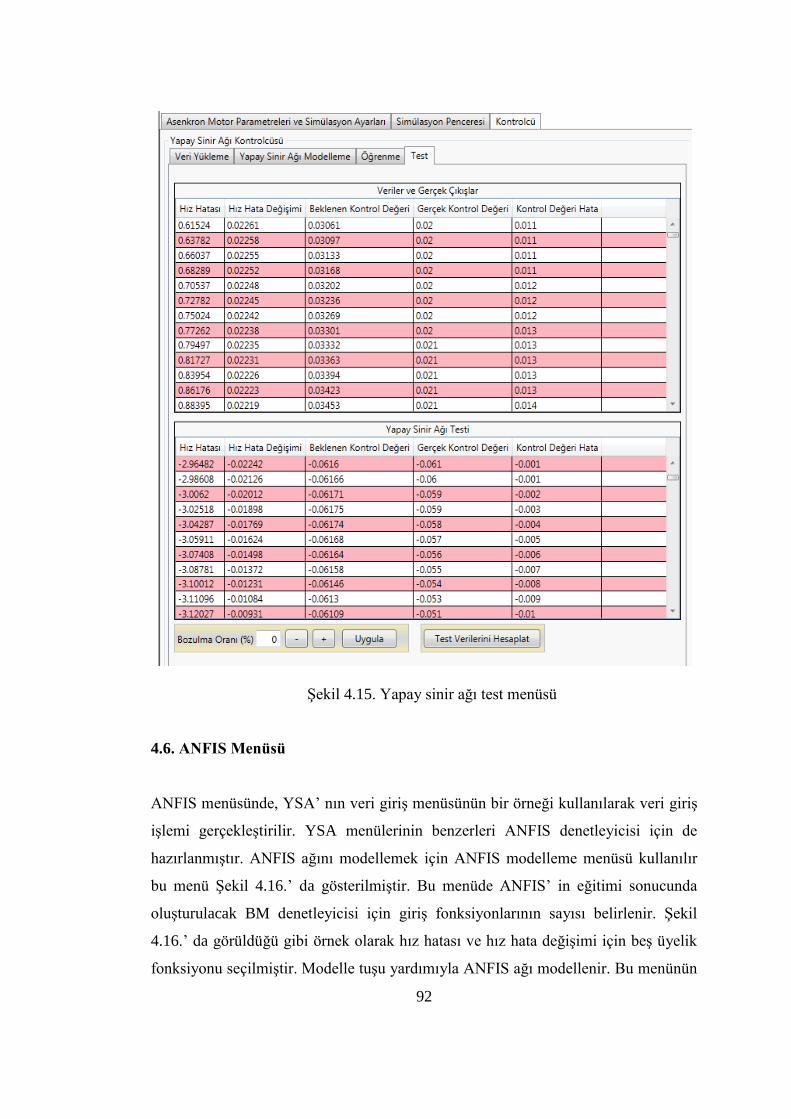
92
59Şekil 4.15. Yapay sinir ağı test menüsü
4.6. ANFIS Menüsü
ANFIS menüsünde, YSA‟ nın veri giriş menüsünün bir örneği kullanılarak veri giriş
işlemi gerçekleştirilir. YSA menülerinin benzerleri ANFIS denetleyicisi için de
hazırlanmıştır. ANFIS ağını modellemek için ANFIS modelleme menüsü kullanılır
bu menü Şekil 4.16.‟ da gösterilmiştir. Bu menüde ANFIS‟ in eğitimi sonucunda
oluşturulacak BM denetleyicisi için giriş fonksiyonlarının sayısı belirlenir. Şekil
4.16.‟ da görüldüğü gibi örnek olarak hız hatası ve hız hata değişimi için beş üyelik
fonksiyonu seçilmiştir. Modelle tuşu yardımıyla ANFIS ağı modellenir. Bu menünün
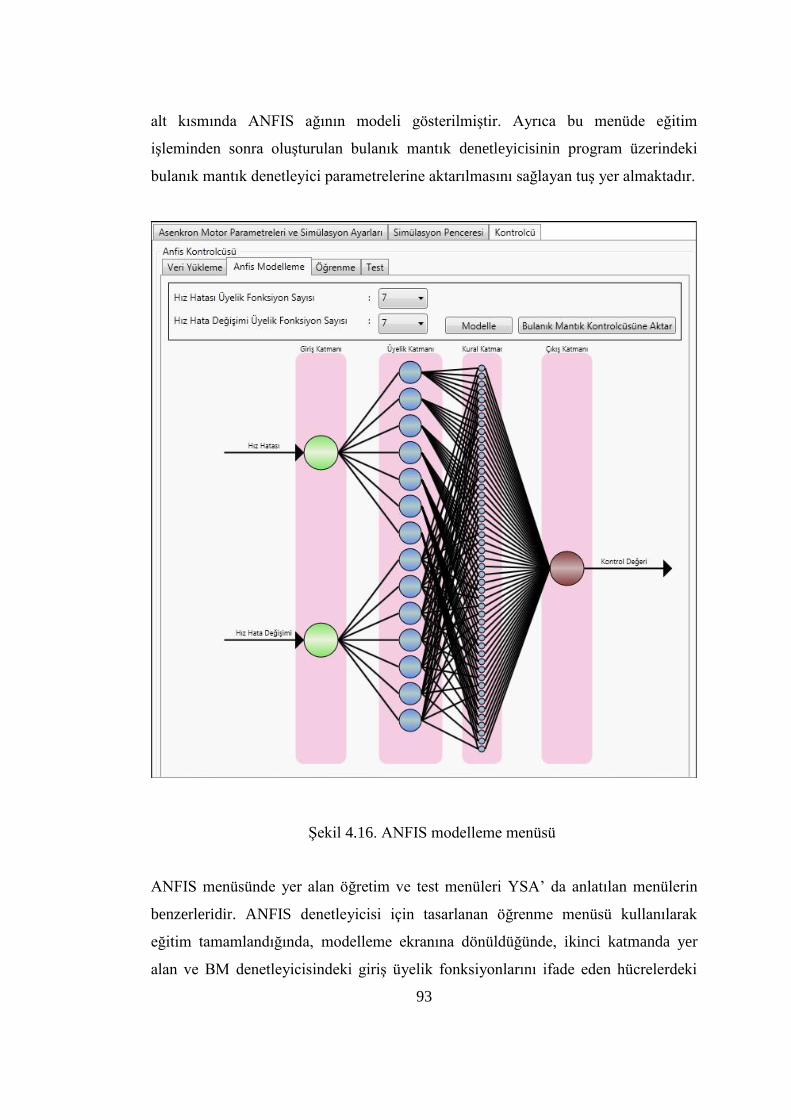
93
alt kısmında ANFIS ağının modeli gösterilmiştir. Ayrıca bu menüde eğitim
işleminden sonra oluşturulan bulanık mantık denetleyicisinin program üzerindeki
bulanık mantık denetleyici parametrelerine aktarılmasını sağlayan tuş yer almaktadır.
60Şekil 4.16. ANFIS modelleme menüsü
ANFIS menüsünde yer alan öğretim ve test menüleri YSA‟ da anlatılan menülerin
benzerleridir. ANFIS denetleyicisi için tasarlanan öğrenme menüsü kullanılarak
eğitim tamamlandığında, modelleme ekranına dönüldüğünde, ikinci katmanda yer
alan ve BM denetleyicisindeki giriş üyelik fonksiyonlarını ifade eden hücrelerdeki
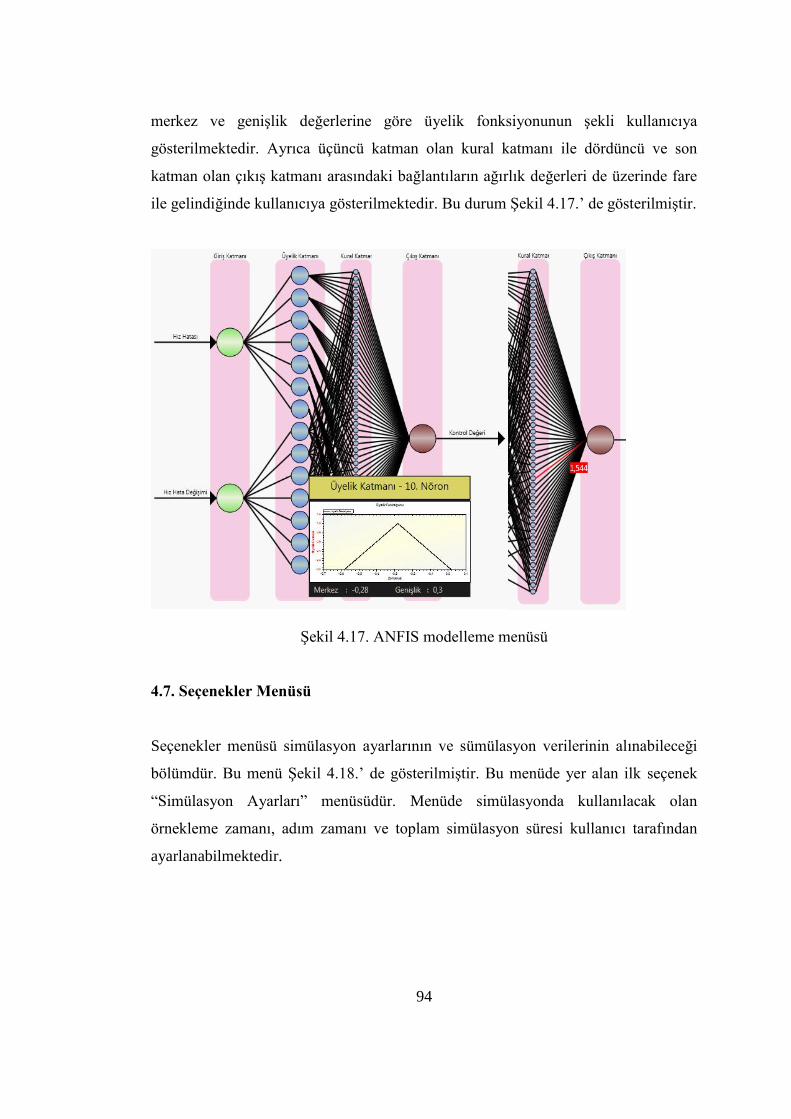
94
merkez ve genişlik değerlerine göre üyelik fonksiyonunun şekli kullanıcıya
gösterilmektedir. Ayrıca üçüncü katman olan kural katmanı ile dördüncü ve son
katman olan çıkış katmanı arasındaki bağlantıların ağırlık değerleri de üzerinde fare
ile gelindiğinde kullanıcıya gösterilmektedir. Bu durum Şekil 4.17.‟ de gösterilmiştir.
Şekil 4.17. ANFIS modelleme menüsü
4.7. Seçenekler Menüsü
Seçenekler menüsü simülasyon ayarlarının ve sümülasyon verilerinin alınabileceği
bölümdür. Bu menü Şekil 4.18.‟ de gösterilmiştir. Bu menüde yer alan ilk seçenek
“Simülasyon Ayarları” menüsüdür. Menüde simülasyonda kullanılacak olan
örnekleme zamanı, adım zamanı ve toplam simülasyon süresi kullanıcı tarafından
ayarlanabilmektedir.
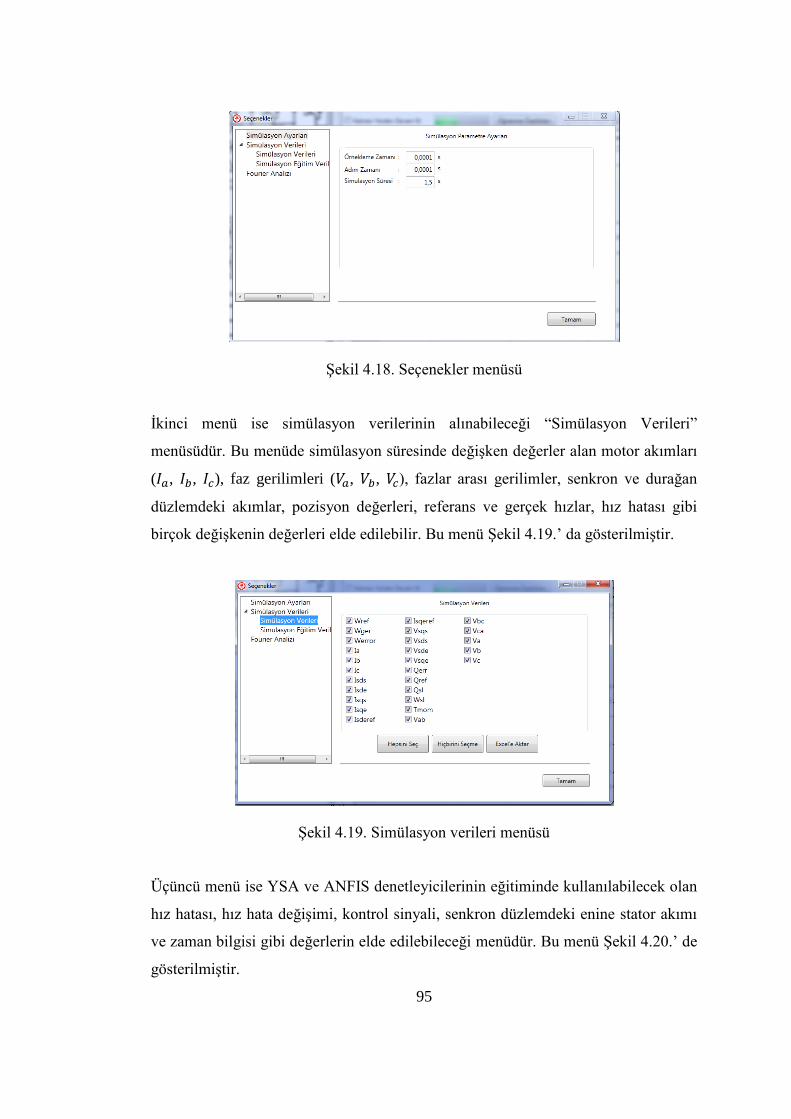
95
Şekil 4.18. Seçenekler menüsü
İkinci menü ise simülasyon verilerinin alınabileceği “Simülasyon Verileri”
menüsüdür. Bu menüde simülasyon süresinde değişken değerler alan motor akımları
( , , ), faz gerilimleri ( , , ), fazlar arası gerilimler, senkron ve durağan
düzlemdeki akımlar, pozisyon değerleri, referans ve gerçek hızlar, hız hatası gibi
birçok değişkenin değerleri elde edilebilir. Bu menü Şekil 4.19.‟ da gösterilmiştir.
Şekil 4.19. Simülasyon verileri menüsü
Üçüncü menü ise YSA ve ANFIS denetleyicilerinin eğitiminde kullanılabilecek olan
hız hatası, hız hata değişimi, kontrol sinyali, senkron düzlemdeki enine stator akımı
ve zaman bilgisi gibi değerlerin elde edilebileceği menüdür. Bu menü Şekil 4.20.‟ de
gösterilmiştir.
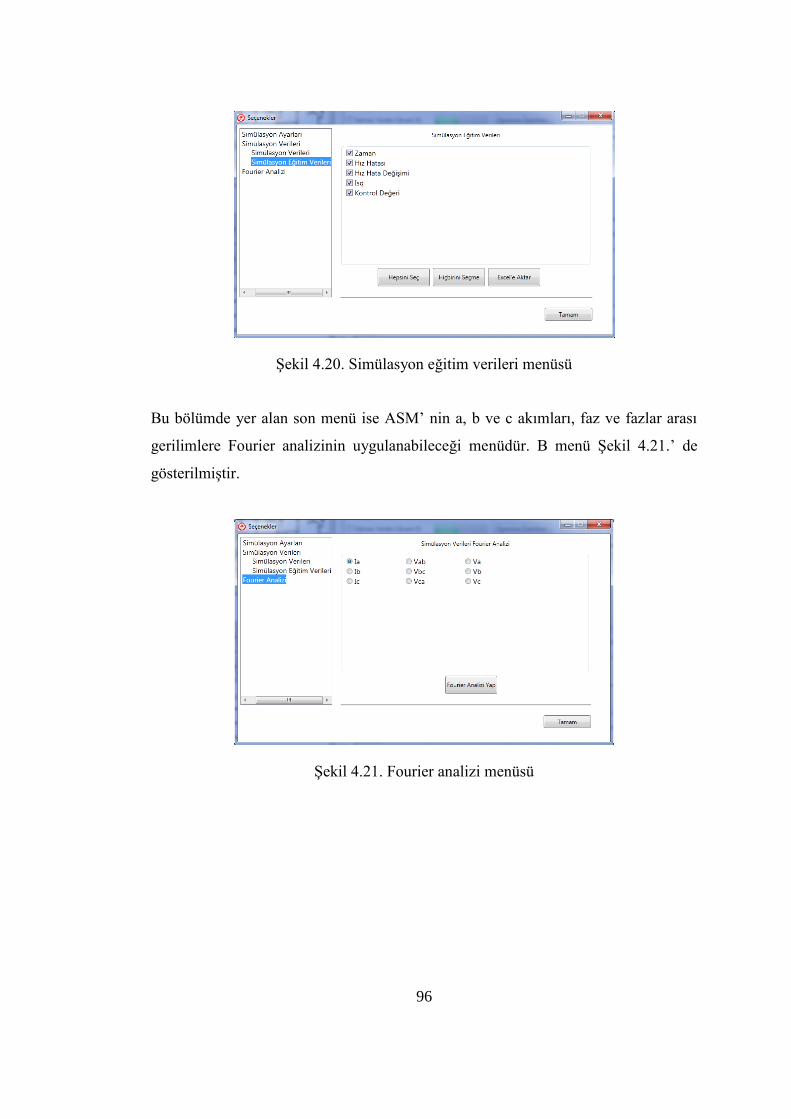
96
Şekil 4.20. Simülasyon eğitim verileri menüsü
Bu bölümde yer alan son menü ise ASM‟ nin a, b ve c akımları, faz ve fazlar arası
gerilimlere Fourier analizinin uygulanabileceği menüdür. B menü Şekil 4.21.‟ de
gösterilmiştir.
Şekil 4.21. Fourier analizi menüsü
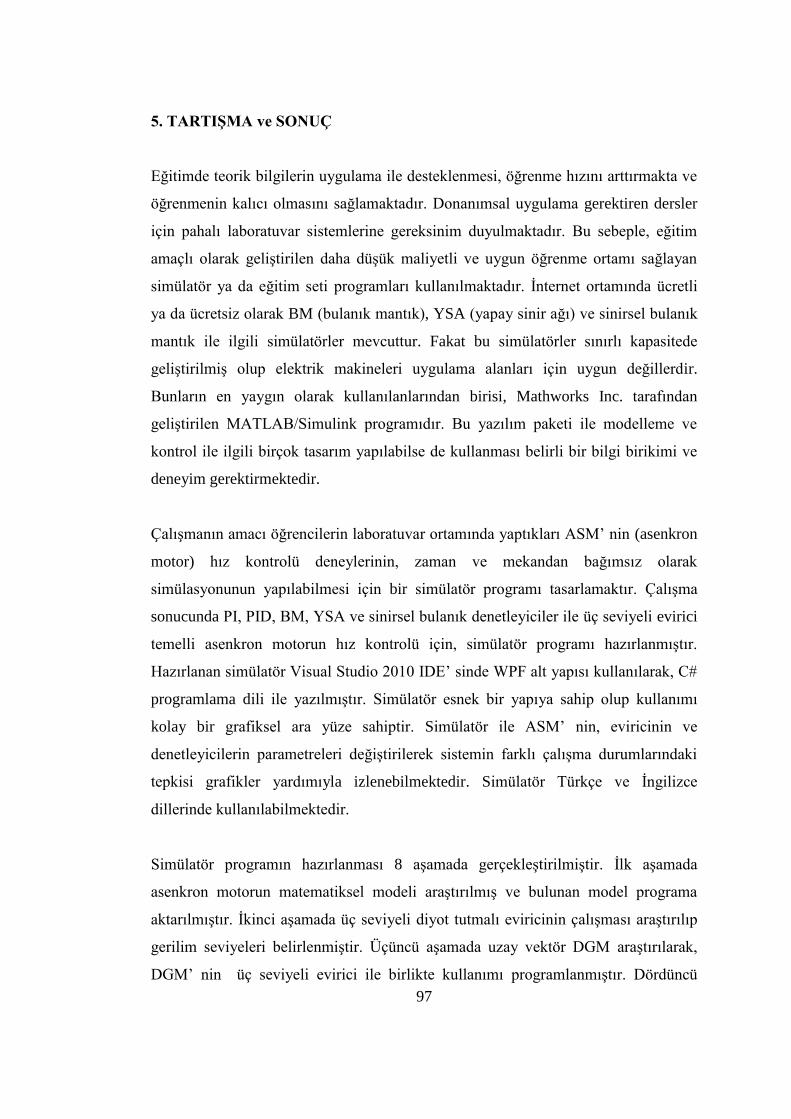
97
5. TARTIġMA ve SONUÇ
Eğitimde teorik bilgilerin uygulama ile desteklenmesi, öğrenme hızını arttırmakta ve
öğrenmenin kalıcı olmasını sağlamaktadır. Donanımsal uygulama gerektiren dersler
için pahalı laboratuvar sistemlerine gereksinim duyulmaktadır. Bu sebeple, eğitim
amaçlı olarak geliştirilen daha düşük maliyetli ve uygun öğrenme ortamı sağlayan
simülatör ya da eğitim seti programları kullanılmaktadır. İnternet ortamında ücretli
ya da ücretsiz olarak BM (bulanık mantık), YSA (yapay sinir ağı) ve sinirsel bulanık
mantık ile ilgili simülatörler mevcuttur. Fakat bu simülatörler sınırlı kapasitede
geliştirilmiş olup elektrik makineleri uygulama alanları için uygun değillerdir.
Bunların en yaygın olarak kullanılanlarından birisi, Mathworks Inc. tarafından
geliştirilen MATLAB/Simulink programıdır. Bu yazılım paketi ile modelleme ve
kontrol ile ilgili birçok tasarım yapılabilse de kullanması belirli bir bilgi birikimi ve
deneyim gerektirmektedir.
Çalışmanın amacı öğrencilerin laboratuvar ortamında yaptıkları ASM‟ nin (asenkron
motor) hız kontrolü deneylerinin, zaman ve mekandan bağımsız olarak
simülasyonunun yapılabilmesi için bir simülatör programı tasarlamaktır. Çalışma
sonucunda PI, PID, BM, YSA ve sinirsel bulanık denetleyiciler ile üç seviyeli evirici
temelli asenkron motorun hız kontrolü için, simülatör programı hazırlanmıştır.
Hazırlanan simülatör Visual Studio 2010 IDE‟ sinde WPF alt yapısı kullanılarak, C#
programlama dili ile yazılmıştır. Simülatör esnek bir yapıya sahip olup kullanımı
kolay bir grafiksel ara yüze sahiptir. Simülatör ile ASM‟ nin, eviricinin ve
denetleyicilerin parametreleri değiştirilerek sistemin farklı çalışma durumlarındaki
tepkisi grafikler yardımıyla izlenebilmektedir. Simülatör Türkçe ve İngilizce
dillerinde kullanılabilmektedir.
Simülatör programın hazırlanması 8 aşamada gerçekleştirilmiştir. İlk aşamada
asenkron motorun matematiksel modeli araştırılmış ve bulunan model programa
aktarılmıştır. İkinci aşamada üç seviyeli diyot tutmalı eviricinin çalışması araştırılıp
gerilim seviyeleri belirlenmiştir. Üçüncü aşamada uzay vektör DGM araştırılarak,
DGM‟ nin üç seviyeli evirici ile birlikte kullanımı programlanmıştır. Dördüncü
98
aşamada klasik PI ve PID denetleyiciler ile asenkron motorun hızı kontrol edilmiştir.
Beşinci aşamada bulanık mantık denetleyicisi araştırılıp programa aktarılmıştır.
Altıncı aşama yapay sinir ağı denetleyicisinin yapısı araştırılıp ağın modellenmesi ve
eğitilmesi işlemleri programsal olarak gerçekleştirilmiştir. Yedinci aşamada sinirsel
bulanık mantık tekniklerinden ANFIS mimarisi araştırılıp, programa aktarılmıştır.
Sekizinci aşamada ise bütün aşamalar tek bir ara yüz üzerinde birleştirilip simülatör
programı hazırlanmıştır.
Şekil 5.1.‟ de PI, PID, BM, YSA ve ANFIS denetleyicileri için yapılan örnek bir
simülasyonun, hız grafikleri verilmiştir. Grafiklerde görülen siyah renk referans hızı,
kırmızı renk ise gerçek hızı ifade etmektedir. Çizelge 5.1.‟ de simülasyonu yapılan
ASM‟ ye uygulanan referans hızlar görülmektedir. Referans hızlar için hızlanma
zamanı 0.1 s olarak seçilmiştir. Ayrıca 0,16 – 0,2 saniyeleri arasında motora 2 nm‟
lik bir yük uygulanmıştır. Yapılan simülasyonda YSA ve ANFIS denetleyicileri, BM
denetleyicinin sisteme uyguladığı kontrol değerine göre eğitilmiştir. Bundan dolayı
YSA ve ANFIS denetleyicilerinin hız grafikleri BM denetleyici ile benzerdir. Şekil
5.1. incelendiğinde, referans hız değişimi ve motora yük uygulama zamanlarında,
BM, YSA ve ANFIS denetleyicilerin PI ve PID denetleyicilere göre, gerçek hızı
referans hıza daha hızlı ulaştırdığı görülmektedir.
Çizelge 5.1. Simülasyon referans hız değerleri
Başlangıç Zamanı Bitiş Zamanı Referans Hız
0 s 0,2 s 100 d/d
0,2 s 0,4 s 200 d/d
0,4 s 0,6 s 300 d/d
0,6 s 1,5 s 500 d/d
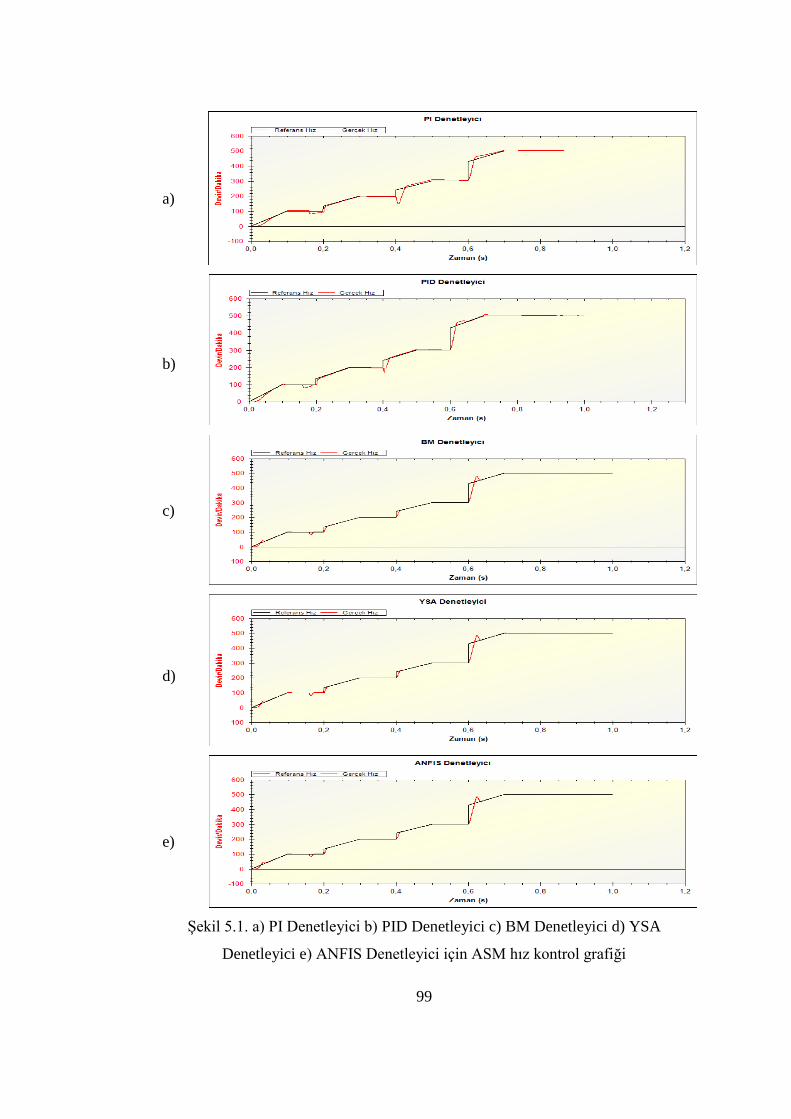
99
Şekil 5.1. a) PI Denetleyici b) PID Denetleyici c) BM Denetleyici d) YSA
Denetleyici e) ANFIS Denetleyici için ASM hız kontrol grafiği
a)
b)
c)
d)
e)

100
İleride yapılacak olan simülatör çalışmalarında, asenkron motoru besleyen üç
seviyeli evirici yerine daha yüksek seviyeli eviriciler kullanılabilir. Bu durum evirici
çıkış gerilimindeki harmonik bileşenlerin azalmasını sağlar. Eviriciyi kontrol etmek
için sinüsoidal ve histerisiz DGM gibi UVDGM‟ den farklı DGM yöntemleri
eklenebilir. Hız denetleyicisi olarak kullanılan PI, PID, BM, YSA ve ANFIS
denetleyicilerine ek olarak genetik algoritmalar incelenebilir. Ayrıca akım
denetleyicilerinde kullanılan PI denetleyici yerine PID, BM, YSA, ANFIS
denetleyicileri ve genetik algoritmalar kullanılabilir. Yapılan simülatör programının
donanımsal model üzerinde uygulaması gerçekleştirilebilir.
101
6. KAYNAKLAR
Akçayol, M.A., Cetin, A., Elmas, Ç., 2002. An educational tool for fuzzy logic-
controlled BDCM, 45 (1), 33-42.
Ba-Razzouk, A., Cheriti, A., Olivier, G., 1997. Field-Oriented Control of Induction
Motors Using Neural-Network Decouplers. IEEE Transactions on Power
Electronics, 12 (4), 752-763.
Bayındır, R., Demirbaş, Ş., Sesveren, Ö., 2008. Reaktif Güç Kompanzasyonu için
Zeki Bir Simülatör Tasarımı ve Gerçekleştirilmesi. Gazi Üniversitesi
Mühendislik Mimarlık Fakültesi Dergisi, 23 (3), 681-688.
Bingöl, O., 2005. Yapay sinir ağı ile modellenen alan yönlendirmeli bir asenkron
motorun üç seviyeli evirici ile hız denetimi. Gazi Üniversitesi Fen Bilimleri
Enstitüsü, Doktora Tezi, 178s, Ankara.
Bingöl, O., Paçacı, S., 2010. A Virtual Laboratory for Fuzzy Logic Controlled DC
Motors. International Journal of Physical Sciences, 16 (5), 2493-2502.
Bose, B., 1997. Power Electronics and Variable Frequency Drives. IEEE Press
Marketing, 639p, New York.
Bose, B.K., 1998. Technology Trends in Microcomputer Control of Electrical
Machines. IEEE Transactions on Industrial Electronics, 35 (1), 160–177.
Bose, B.K., 2002. Modern Power Electronics and AC Drives. Prentice Hall, 737s,
New Jersey.
Bousquest-Monge, B., Bordonau, J., Boroyevich, D., Somavilla, S., 2004. The
Nearest Three Virtual Space Vector PWM A Modulation for the
Comprehensive Neutral–Point Balancing in the Three-Level NPC Inverter.
IEEE Power Electronics Letters, 2 (1), 11-15.
Boz, A.F., 2011. Otomatik Kontrol Sistemleri / Kontrol Sistemlerine Giriş.
http://web.sakarya.edu.tr/~afboz/control/index.html. 02:05:2011.
Celanovic, N.,Boroyevich, D., 2000. A Comprehensive Study of Neural- Point
Voltage Balancing Problem in Three-Level Neutral-Point-Clamped Voltage
Source PWM Inverters. IEEE Transactions On Power Electronics, 15 (2),
242-249.
Celanovic, N., Boroyevich, D., 2001. A Fast Space-Vector Modulation Algorithm for
Multilevel Three-Phase Converters. IEEE Transactions On Industry
Applications, 37 (2), 637-641.
102
Chow, M.Y., Mangum, P. M., Yee, S.O., 1991. A Neural Network Approach To
Real-Time Condition Monitoring Of Induction Motors. IEEE Transactions on
Industrial Electronics, 38 (6), 448-453.
Dandil, B., Gökbulut, M., 2005. Asenkron motorların sinirsel bulanık denetleyici ile
uyarlamalı denetimi. Gazi Üniversitesi Mühendislik Mimarlık Fakültesi
Dergisi, 20 (2), 145-153.
Drury, W., Grant, D., 1994. Variable speed drives the future. Power Engineering
Journal, 8 (1), 27-34.
Ekren, O., 2009. Bir Soğutma Grubunda Kompresör Hızının ve Elektronik Genleşme
Vanasının Bulanık Mantık Algoritma ile Kontrolü. Dokuz Eylül Üniversitesi
Fen Bilimleri Enstitüsü, Doktora Tezi, 154s, İzmir.
Elmas, Ç., Coşkun, İ., 1995. Yapay Sinir Ağları Kullanılarak Asenkron Motorun
Statör Akımlarının Adaptiv Kontrolü. Elektrik mühendisliği 6. Ulusal
Kongresi, Bursa, 442-445.
Elmas, Ç., 2007. Yapay Zeka Uygulamaları. Seçkin Yayıncılık, 425s, Ankara.
Elmas, Ç., Yiğit, T., 2008. Eviriciler için Bilgisayar Temelli Eğitim Laboratuvarı.
Gazi Üniversitesi Endüstriyel Sanatlar Eğitim Fakültesi Dergisi, 21, 128-140.
Elmas, Ç., Üstün, O., Sayan, H.H., 2008. A neuro-fuzzy controller for speed control
of a permanent magnet synchronous motor drive. Science Direct, 34 (1), 657-
664.
Gökbulut, M., Bal, C., Dandil B., 2006. A Virtual Electrical Drive Control
Laboratory: Neuro-Fuzzy Control of InductionMotors. Computer
Applications in Engineering Education, 14 (3), 211-221.
Gülez, K.,1999. Asenkron motorun DSP ( sayısal işaret işlemci) tabanlı bir kontrol
sistemi kullanılarak YSA ( yapay sinir ağları) ile performansının
arttırılması.Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü, Doktora Tezi,
203s, İstanbul.
Hagan, Martin T., 1996. Neural Network Design. PWS Publishing Company, 736s,
Boston.
Holtz, J., 1994. Pulse width Modulation for Electronic power Conversion.
Proceedings of the IEEE, 82 (8), 1194-1214.
Krishnan, R., 2001. Electriv Motor Drives Modeling, Analysis and Control.
PrenticeHall, 652p, New Jersey.
103
Li, L., 1999. Optimal PWM Techniques in Voltage Source Inverters.
PolytechnicUniversity, Ph.D, 117p, New York.
Lipo, T.A., Novotny, D.W., 1995. Dynamics and Control of AC Drives,
McGrawHill, 352p, New York.
Lorenz, R.D., Lipo, T.A., Novontly, D.W., 1994. Motion Control with Induction
Motors, Proceedings of The IEEE, 82 (8), 1215-1240.
McCulloch, W.,Pitts, W., 1943. A Logical Calculus Of The Ideas Immanenet in
Nervous Activity. Bulletin Mathematical Biophysics, 5, 115-133.
Mondal, S.M., Pinto, J.O., Bose, B.K., 2002. A Neural Network Based Space Vector
PWM Controller for a Three-Level Voltage Fed Inverter Induction Motor
Drive. IEEE Transactions on Industry Applications, 38 (3), 660-669.
Nabae, A., Takahashi, I., Akagi, H., 1981. A New Neutral Point Clamped PWM
Inverter. IEEE Transactions on Industry Applications, IA-17 (5), 518-523.
Öztemel, E., 2006. Yapay Sinir Ağları. Ankara, Papatya Yayıncılık, 1, 232s. Ankara.
Pou, J., Boroyevich, D., Pindado, R., 2002. New Feed Forward Space Vector PWM
Method to Obtain Balanced AC Output Voltages in a Three Level Neutral
Point Clamped Converter. IEEE Transactions on Industrial Electronics, 49
(5), 1026-1034.
Saygın, A., 2004. Asenkron Motor Hız Kontrolünün Matris Konverter ile Hızının
Denetlenmesi. Gazi Üniversitesi Fen Bilimleri Enstitüsü, Doktora Tezi, 153s,
Ankara.
Sen, P.C., 1990. Electric Motor Drives and Control Past, Present and Future. IEEE
Transactionson Industrial Electronics, 37 (6), 562–575.
Şen, Z., 2001. Bulanık Mantık ve Modelleme İlkeleri, Bilge Kültür Sanat, 172s,
İstanbul.
Tallam, R.M., Habetler, T.G., Harley, R.G., 2003. Stator Winding Turn-Fault
Detection for Closed Loop Induction Motor Drives. IEEE Transactions on
Industry Applications, 720-724.
Texas Instruments, 1998. Implementation of a Speed Field Oriented Control of Three
Phase AC Induction Motor Using TMS320F240, BPRA076, 1-5.
Tuncay, N., Gökaşan, M., Boğosyan, S., 2003. Güç elektroniği Çeviriciler,
Uygulamalar ve Tasarım Mohan. N.,Undeland. T.M.,Robbins. W., Literatür
Yayıncılık, 896s, İstanbul.
104
Wishart, M.T., Harley, R.G., 1995. Identificationand Control of Induction Machines
Using Artificial Neural Network, IEEE Transactions on Industry
Applications, 31 (3),612-619.
Yamanaka, K., Hava, A.M., Kirino. H.,Tanaka, Y., Koya, N., Kume, T., 2002. A
Novel Neutral Point Potentail StabilizationTechnique using the Information
of Output Current Polarities and Voltage Vector, IEEE Transactions on
Industry Applications, 38 (6), 1572-1580.
Ye, Z., Wu, B., Sadeghian, A.R., 2001.Induction Motor Mechanical Fault Online
Diagnosis with The Application Of Artificial Neural Network., Applied
Power Electronics Conference and Exposition, 2001. APEC 2001. Sixteenth
Annual IEEE, 2, 1015-1020.
Yiğit, T., Elmas, Ç., 2008. An Educational Tool For Controlling SRM. Computer
Applications in Engineering Education, 16 (4), 268-279.
Zadeh, L.A., 1973. Outline of a new approach to the analysis of complex systems
and decision processes. IEEE Transactions on Systems, Manand Cybernetics,
3 (1), 28-44.
Zadeh, L.A., 1975. Theconcept of linguistic variable and its application to
approximate reasoning. Information Sciences, 8 (1), 199-249.
105
ÖZGEÇMĠġ
Adı Soyadı : Serdar PAÇACI
Doğum Yeri ve Yılı : ULUBORLU – 1985
Medeni Hali : Bekar
Yabancı Dili : İngilizce
Eğitim Durumu (Kurum ve Yıl)
Lise : Isparta Milli Piyango Anadolu Lisesi – 2003
Lisans : Isparta Süleyman Demirel Üniversitesi – 2007
Yüksek Lisans : Isparta Süleyman Demirel Üniversitesi – 2011
Çalıştığı Kurum/Kurumlar ve Yıl
Süleyman Demirel Üniversitesi Uluborlu Meslek Yüksek Okulu, 2007 - 2008
Süleyman Demirel Üniversitesi Yalvaç Meslek Yüksek Okulu, 2008-2009
Efe Eroğlu Bilgi Sistemleri İnş.San. ve Tic.Ltd.Şt Eskişehir (Süleyman Demirel
Üniversitesi Araştırma ve Uygulama Hastaneleri Bilgi İşlem), 2009-2010
Süleyman Demirel Üniversitesi Bilgi İşlem Daire Başkanlığı, 2010 - …
Yayınları (SCI ve diğer makaleler)
"A Virtual LaboratoryforFuzzyLogicControlled DC Motors" International Journal of
PhysicalSciences, ISSN 1992 - 1950 Vol. 5(16), pp. 2493-2502, 4 December, 2010





























