Embed Size (px)
Citation preview

MANOEUVRING BOOKLET V1.06
According to: Solas II-1, regulation 28.3
St. Petersburg 2006
Mathematical model ofZ-drive tug 1 (bp 53t)
Version: v28
Dll Version: 2.31.558

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
2
1. GENERAL DESCRIPTION 1.1. Ships particulars
1.1.1. Ships name: Z-drive tug 1 (bp 53t) version v28
1.1.2. Displacement: 366 t Deadweight ---
1.1.3. LOA: 25.3 m Breadth (Moulded): 10.4 m LBP: 23.2 m Depth (Moulded): 4.6 m
Extreme height of the ships structure: 12.0 m Draft middle in Z-drive Tug: 3.3 m (measured from keel) Hull coefficient: 0.48
Longitudinal metacenter height: 18.5 m Distance from middle frame to gravity center in bow:
0.40 m
Transverse metacenter height: 2.19 m Distance from base plane to gravity center:
3.93 m
1.1.4. Main Engine(s) Type: DIESEL Number of units: 2 Power output: 1566 kW
Remote control system modes: Normal
1.1.5. Propeller(s) Type: FPP Diameter: 2.16 m
Number of units: 2 Propeller immersion: 0.00 m Direction of rotation: RIGHT Pitch ratio: 0.96
1.1.6. Rudder Type: AZIMUTAL THRUSTER
Number of units: 0 Rudder area ratio: 100.0 % Number of pumps: 2 Total rudder area: ---
)(arearudder Totalarearudder Effect.
Max. rudder angle: 180° Neutral rudder angle for Full Ahead: 0.0°
1.1.7. Bow and Stern Thrusters Type: ---
Number of units (bow): 0 Number of units (stern): 0 Bow thruster capacity: - Stern thruster capacity: - Bow thruster location: - Stern thruster location: -
(Distance from middle frame to thruster axle)

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
3
1.1.8. Bow and Astern Profiles Bow profile: Not bulbous Astern profile: U
1.1.9. Bow And Stern Anchors Bow Anchor(s) Stern Anchor
Type: Hall's Type: --- Weight: 450.0 kg Weight: ---
Number of Anchors: 2 Number of Anchors: --- Chain Gauge: 19.0 Chain Gauge: ---
Number of shackle: 7 Number of shackle: --- Max.rate of heaving: 0.30 m/s Max.rate of heaving: ---
Blind Zones (not drawn to scale)
2.7 (A)3.9 (C) 32 (B)
6 (D)
(A) Draft (bow) 2.7 m (B) Blind zone (bow) 32 m (C) Draft (stern) 3.9 m (D) Blind zone (stern) 6 m

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
4
Other hull particulars
23.2 (C) 9.6 (D) (A) Distance from stern to bridge wing 14.3 m (B) Distance from bridge wing to bow 11.0 m (C) Length of waterline 23.2 m (D) Width of waterline 9.6 m Extreme height 12.0 m
(E) Length of parallel mid body ---

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
5
1.2. Characteristics of Main Engine
Propeller RPM Speed, Knots Engine order (A) (B) (A) (B) Power, kW (A)
Pitch ratio
Full Sea Ahead 290 290 12.8 10.6 0 0.96 Full Ahead 252 252 11.2 10.0 0 0.96 Half Ahead 206 206 9.2 8.9 0 0.96 Slow Ahead 160 160 7.1 7.3 0 0.96 Dead Slow Ahead 110 110 4.9 5.1 0 0.96 Dead Slow Astern 0 0 0.0 0.0 0 0.96 Slow Astern 0 0 0.0 0.0 0 0.96 Half Astern 0 0 0.0 0.0 0 0.96 Full Astern 0 0 0.0 0.0 0 0.96
(A) – Deep water, Water depth 1000 m (B) – Shallow water, Water depth to draft ratio 1.2
Min RPM: 76 Speed at min RPM: 3.3 knots Maximum No. of consecutive starts (diesel engine) 12
Time taken to effect changes in Engine Telegraph Settings
Time Taken (min-s) Change in Engine Telegraph Settings Normal EmergencyFrom Full Sea Ahead to Full Astern - - From Full Ahead to Full Astern - - From Half Ahead to Full Astern - - From Slow Ahead to Full Astern - - From Dead Slow Ahead to Full Astern - - From Full Sea Ahead to Stop - - From Full Ahead to Stop - - From Half Ahead to Stop - - From Slow Ahead to Stop - - From Dead Slow Ahead to Stop - -

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
6
1.3. Autopilot settings Yawing
1..6 2
Rudder 1..9 5
Count Rud 0..9 5
Speed Log
Synch Gyro -
Rud Lim 5..max 70°
Off Course 5..30 10°
RoT 5..max 600°/min
Sensitive (1-10): 5 Max course: 10°
Max rudder angle: 70° Yaw rate: 600°/min Adaptive: No

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
7
2. MANOEUVRING CHARACTERISTICS IN DEEP WATER
2.1. Course change performance Full Ahead
Initial turning test results
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Advance, cbls
0.2 0.4 0.6 0.8 1 Transfer, cbls12.5 knots
10 degrees rudder
20 degrees rudder
35 degrees rudder
Environmental conditions during test
Wind direction Wind speed Sea state Depth of water, m 0.0 0.0 0.0 1000

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
8
Table of course change test results
Full Ahead, 10 degrees of rudder Change of
Heading, deg Time from W/O, min-s
Speed after turn, knots
Rate of turn, deg/min
Advance, cbls
Transfer, cbls
10 0-06 12.5 141.4 0.23 0.00 20 0-10 12.2 166.9 0.36 0.02 30 0-14 12.1 174.8 0.48 0.05 40 0-17 12.0 177.7 0.58 0.11 50 0-21 12.0 178.7 0.67 0.17 60 0-24 12.0 179.1 0.74 0.25 70 0-28 12.0 179.3 0.81 0.34 80 0-31 11.9 179.3 0.85 0.45 90 0-34 11.9 179.4 0.88 0.55
100 0-38 11.9 179.4 0.89 0.66 110 0-41 11.9 179.4 0.87 0.78 120 0-45 11.9 179.4 0.84 0.89 130 0-48 11.9 179.4 0.80 0.98 140 0-51 11.9 179.4 0.73 1.07 150 0-55 11.9 179.4 0.64 1.15 160 0-58 11.9 179.4 0.56 1.20 170 1-01 11.9 179.4 0.45 1.25 180 1-05 11.9 179.4 0.34 1.28 270 1-34 11.9 179.4 -0.38 0.74 360 2-04 11.9 179.4 0.15 0.02

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
9
Full Ahead, 20 degrees of rudder Change of
Heading, deg Time from W/O, min-s
Speed after turn, knots
Rate of turn, deg/min
Advance, cbls
Transfer, cbls
10 0-05 12.3 217.4 0.16 -0.00 20 0-07 11.9 253.8 0.24 0.00 30 0-09 11.4 272.7 0.32 0.02 40 0-11 11.1 282.1 0.38 0.05 50 0-13 11.0 288.0 0.43 0.08 60 0-16 10.8 292.2 0.49 0.13 70 0-18 10.7 294.0 0.52 0.17 80 0-20 10.7 295.3 0.55 0.23 90 0-22 10.7 296.4 0.57 0.28
100 0-24 10.7 297.3 0.58 0.34 110 0-26 10.6 297.8 0.58 0.40 120 0-28 10.6 298.2 0.57 0.46 130 0-30 10.6 298.4 0.54 0.51 140 0-32 10.6 298.5 0.51 0.56 150 0-34 10.6 298.6 0.48 0.61 160 0-36 10.6 298.7 0.43 0.65 170 0-38 10.6 298.7 0.38 0.67 180 0-40 10.6 298.7 0.32 0.69 270 0-58 10.6 298.8 -0.09 0.45 360 1-16 10.6 298.8 0.15 0.04

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
10
Full Ahead, 35 degrees of rudder Change of
Heading, deg Time from W/O, min-s
Speed after turn, knots
Rate of turn, deg/min
Advance, cbls
Transfer, cbls
10 0-04 11.8 326.2 0.14 -0.00 20 0-05 11.1 382.6 0.19 -0.00 30 0-07 10.4 421.3 0.23 0.00 40 0-08 9.8 456.7 0.27 0.02 50 0-10 9.3 474.0 0.31 0.03 60 0-11 9.0 486.4 0.33 0.05 70 0-12 8.6 507.8 0.35 0.07 80 0-13 8.4 520.4 0.37 0.09 90 0-14 8.3 531.0 0.38 0.11
100 0-15 8.1 539.6 0.39 0.13 110 0-17 8.0 546.3 0.39 0.17 120 0-18 7.9 547.0 0.39 0.19 130 0-19 7.8 547.0 0.39 0.21 140 0-20 7.8 547.4 0.38 0.23 150 0-21 7.7 548.1 0.37 0.25 160 0-23 7.7 549.0 0.35 0.27 170 0-24 7.7 549.6 0.33 0.29 180 0-25 7.6 550.0 0.31 0.30 270 0-35 7.6 551.3 0.14 0.23 360 0-44 7.6 551.4 0.20 0.06
Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
11
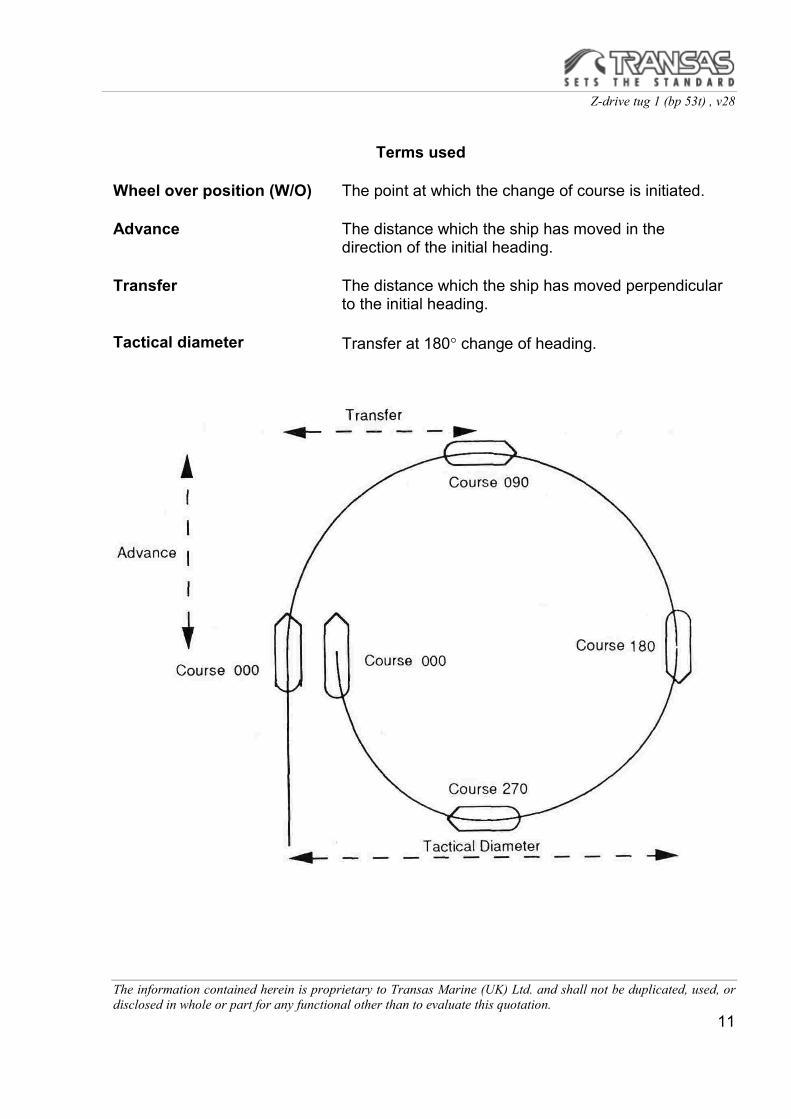
Terms used
Wheel over position (W/O) The point at which the change of course is initiated.
Advance The distance which the ship has moved in the direction of the initial heading.
Transfer The distance which the ship has moved perpendicular to the initial heading.
Tactical diameter Transfer at 180° change of heading.

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
12
2.2. Turning circles in deep water Full Ahead
-0.1
0
0.1
0.2
0.3
0.4
Advance, cbls
-0.1 0.1 0.2 Transfer, cbls
0 min 14 s
8.3 knots 0 min 25 s
7.6 knots
0 min 35 s
7.6 knots
0 min 44 s
7.6 knots
12.5 knots
Maximum rudder angle used throughout turn Tactical diameter: 0.3 cbls Transfer at 90°: 0.1 cbls Advance at 90°: 0.4 cbls
Environmental conditions during Manoeuvring Trial
Wind direction Wind speed Sea state Depth of water, m 0.0 0.0 0.0 1000

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
13
2.3. Accelerating turn
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Advance, cbls
-0.1 -0.05 0.05 0.1 0.15 0.2 0.25 0.3 Transfer, cbls
0 min 12 s
6.0 knots 0 min 24 s
6.4 knots
0 min 35 s
6.5 knots
0 min 47 s
6.5 knots
0.0 knots
Maximum rudder angle used throughout turn Full Ahead ordered
Tactical diameter: 0.2 cbls Transfer at 90°: 0.1 cbls Advance at 90°: 0.1 cbls
Environmental conditions during Manoeuvring Trial
Wind direction Wind speed Sea state Depth of water, m 0.0 0.0 0.0 1000

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
14
2.4. Yaw checking test
Zigzag (or Kempf) manoeuvre The manoeuvre provides a qualitative measure of the effectiveness of the rudder to initiate and check changes of heading. The manoeuvre is performed in the following manner. With the ship steaming at a uniform speed and on a constant heading a nominal rudder angle, say 20 degrees, is applied as quickly and as smoothly as possible and held constant until the ships heading has changed by 20 degrees (check angle) from the base course. At this point 20 degrees of opposite rudder is applied and held until the ship’s heading has crossed the base course and is 20 degrees in the opposite direction, the rudder is then reversed as before. This procedure is repeated until the ship’s head has passed through the base course 5 times. During the manoeuvre the ship’s heading and rudder angle are recorded continuously.
Zigzag (or Kempf) Manoeuvre: Ship’s Heading and Rudder Angle against Time
25
20
15
10
5
0
5
10
15
20
25
10 20 30 40 50 60 70 80
Time, s
Heading, deg
Rudder, deg
Port
Stbd
Rudder angle 20 deg Initial speed 12.5 kts Check angle 20 deg Full Ahead Swing time 9 s Overshoot time 3 s Overshoot angle 8 deg Period 30 s

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
15
Terms used
Zigzag (or Kempf) manoeuvre

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
16
Pull out manoeuvre The pull out manoeuvre was developed as a simple test to give a quick indication of a ship’s course stability. The ship is held on steady course and at a steady speed. A rudder angle of approximately 20 degrees is applied and the ship allowed to achieve a steady rate of turn; at this point the rudder is returned to midships. If the ship is stable the rate of turn will decay to zero for turns to both port and starboard. If the ship has a steering bias, then port and starboard turns will decay to the same small rate of turn on whichever hand the bias exists. If the ship is unstable then the rate of turn will reduce to some residual rate of turn.
250
200
150
100
50
0
50
100
150
200
250
20 40 60 80 100 120 140
Rate of turndeg/min
Port
Stbd
Time, s
Initial speed 12.5 kts
Stable Ship Full Ahead
Rudder at zero time returned to CLP

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
17
2.5. Man-overboard and parallel course manoeuvres Williamson Turn shown (Full Ahead)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
cbls
-0.3 -0.2 -0.1cbls
Initial Speed 12.5 knots
0 min 10 s 62 deg
0 min 38 sAutoPilot turned ON
1 min 3 s
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
cbls
0.1 0.2 0.3 cbls
0 min 10 s 62 deg
0 min 38 sAutoPilot turned ON
1 min 3 s
Forward reach: 0.70 cbls Forward reach: 0.70 cbls
Lateral transfer: 0.35 cbls Lateral transfer: 0.35 cbls Lateral shift: 0.02 cbls Lateral shift: 0.02 cbls
Parallel course manoeuvre (Full Ahead)
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Advance, cbls
-0.05 0.05 0.1 0.15 Transfer, cblsInitial Speed 12.5 knots
Elapsed time 0 min 22 sAutoPilot turned ON
Elapsed time 0 min 25 s

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
18
Terms used
Williamson Turn shown
Parallel course manoeuvre

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
19
3. STOPPING AND SPEED CONTROL CHARACTERISTICS IN DEEP WATER
3.1. Stopping ability
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.7
0-03 12.1
0-04 10.9
0-06 8.5
0-10 -0.9
min-s knots
Full Sea Aheadto
Full Sea Astern
0-00 11.1
0-02 11.5
0-03 11.1
0-05 9.9
0-07 7.0
0-10 -1.1
min-s knots
Full Aheadto
Full Sea Astern
From Full Sea Ahead to Full Astern
Initial rpm Final rpm Initial Speed, knots
Final Speed, knots
Track reach, n.miles
Head reach, n.miles
Side reach, n.miles
Final course,
deg 290.39 290.95 12.8 0.0 0.025 0.025 0.00000 0
From Full Ahead to Full Astern
Initial rpm Final rpm Initial Speed, knots
Final Speed, knots
Track reach, n.miles
Head reach, n.miles
Side reach, n.miles
Final course,
deg 250.24 291.47 11.1 0.0 0.023 0.023 0.00000 0

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
20
Stopping ability (to Full Astern)
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.7
0-03 12.1
0-04 10.9
0-06 8.5
0-10 -0.9
min-s knots
Full Sea Aheadto
Full Sea Astern
0-00 11.1
0-02 11.5
0-03 11.1
0-05 9.9
0-07 7.0
0-10 -1.1
min-s knots
Full Aheadto
Full Sea Astern
0-00 9.1
0-02 10.3
0-04 10.0
0-06 8.5
0-10 -0.2
min-s knots
Half Aheadto
Full Sea Astern
0-00 7.1
0-02 8.6
0-04 8.4
0-07 6.4
0-10 -0.6
min-s knots
Slow Aheadto
Full Sea Astern
To Full Astern
from: Track
Reach, n.miles
Head Reach, n.miles
Side Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead 0.025 0.025 0.00000 0-10 0
Full Ahead 0.023 0.023 0.00000 0-10 0 Half Ahead 0.021 0.021 0.00000 0-10 0 Slow Ahead 0.018 0.018 0.00000 0-10 0

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
21
Stopping ability (to Stop) Final speed is 1 knot
0
0.02
0.04
0.06
0.08
0.1
n.milesTrack reach,
0-00 12.8
0-07 8.4
0-18 5.4
0-35 3.4
1-02 2.1
1-47 1.2
2-10 1.0
min-s knots
Full Sea Aheadto
Stop
0-00 11.1
0-08 7.3
0-21 4.6
0-40 2.9
1-12 1.8
2-08 1.0
min-s knots
Full Aheadto
Stop
0-00 9.1
0-10 5.9
0-25 3.8
0-49 2.4
1-29 1.4
2-05 1.0
min-s knots
Half Aheadto
Stop
0-00 7.1
0-13 4.6
0-33 2.9
1-05 1.8
2-00 1.0
min-s knots
Slow Aheadto
Stop
To Stop from: Track
Reach, n.miles
Head Reach, n.miles
Side Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead 0.107 0.107 0.00000 2-10 0
Full Ahead 0.101 0.101 0.00000 2-08 0 Half Ahead 0.092 0.092 0.00000 2-05 0 Slow Ahead 0.080 0.080 0.00000 2-00 0
AUTOPILOT is turned on
(AutoPilot off at speed ≤ 2 kts or course error > 3 × 10°) Engine mode is Normal
Environmental conditions during Manoeuvring Trial
Wind direction Wind speed Sea state Depth of water, m 0.0 0.0 0.0 1000

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
22
3.2. Deceleration performance
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.3
0-03 11.9
0-04 11.6
0-06 11.4
min-s knots
Full Sea Aheadto
Full Ahead
0-00 11.1
0-02 10.5
0-03 10.0
0-05 9.7
0-08 9.4
min-s knots
Full Aheadto
Half Ahead
0-00 9.1
0-02 8.5
0-04 8.0
0-07 7.7
0-09 7.5
0-12 7.3
min-s knots
Half Aheadto
Slow Ahead
0-00 7.1
0-03 6.5
0-06 6.0
0-09 5.6
0-12 5.3
0-15 5.2
0-17 5.1
min-s knots
Slow Aheadto
Dead Slow Ahead
Engine orders Track
Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead to Full Ahead 0.021 0-06 0 Full Ahead to Half Ahead 0.022 0-08 0 Half Ahead to Slow Ahead 0.026 0-12 0 Slow Ahead to Dead Slow Ahead 0.028 0-17 0
AUTOPILOT is turned on Engine mode is Normal

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
23
3.3. Acceleration performance
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 0.0
0-05 8.0
0-07 10.0
0-09 11.1
0-11 11.8
0-12 12.3
min-s knots
Stopto
Full Sea Ahead
Full Ahead ordered Speed, knots Track reach, n.miles Time, min-s Course, deg
2.0 0.000 0-03 0 4.0 0.001 0-04 0 6.0 0.003 0-05 0 8.0 0.005 0-05 0
10.0 0.010 0-07 0 12.0 0.023 0-11 0 12.2 0.026 0-12 0
8.0 0.059 0-51 0 9.0 0.089 1-04 0
10.8 0.304 2-19 0
AUTOPILOT is turned on Engine mode is Normal

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
24
3.4. Stopping ability
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.7
0-03 12.1
0-04 10.9
0-06 8.5
0-10 -0.9
min-s knots
Full Sea Aheadto
Full Sea Astern
0-00 11.1
0-02 11.5
0-03 11.1
0-05 9.9
0-07 7.0
0-10 -1.1
min-s knots
Full Aheadto
Full Sea Astern
From Full Sea Ahead to Full Astern
Initial rpm Final rpm Initial Speed, knots
Final Speed, knots
Track reach, n.miles
Head reach, n.miles
Side reach, n.miles
Final course,
deg 290.39 290.95 12.8 0.0 0.025 0.025 0.00000 0
From Full Ahead to Full Astern
Initial rpm Final rpm Initial Speed, knots
Final Speed, knots
Track reach, n.miles
Head reach, n.miles
Side reach, n.miles
Final course,
deg 250.24 291.47 11.1 0.0 0.023 0.023 0.00000 0

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
25
Stopping ability (to Full Astern)
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.7
0-03 12.1
0-04 10.9
0-06 8.5
0-10 -0.9
min-s knots
Full Sea Aheadto
Full Sea Astern
0-00 11.1
0-02 11.5
0-03 11.1
0-05 9.9
0-07 7.0
0-10 -1.1
min-s knots
Full Aheadto
Full Sea Astern
0-00 9.1
0-02 10.3
0-04 10.0
0-06 8.5
0-10 -0.2
min-s knots
Half Aheadto
Full Sea Astern
0-00 7.1
0-02 8.6
0-04 8.4
0-07 6.4
0-10 -0.6
min-s knots
Slow Aheadto
Full Sea Astern
To Full Astern
from: Track
Reach, n.miles
Head Reach, n.miles
Side Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead 0.025 0.025 0.00000 0-10 0
Full Ahead 0.023 0.023 0.00000 0-10 0 Half Ahead 0.021 0.021 0.00000 0-10 0 Slow Ahead 0.018 0.018 0.00000 0-10 0

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
26
Stopping ability (to Stop) Final speed is 1 knot
0
0.02
0.04
0.06
0.08
0.1
n.milesTrack reach,
0-00 12.8
0-07 8.4
0-18 5.4
0-35 3.4
1-02 2.1
1-47 1.2
2-10 1.0
min-s knots
Full Sea Aheadto
Stop
0-00 11.1
0-08 7.3
0-21 4.6
0-40 2.9
1-12 1.8
2-08 1.0
min-s knots
Full Aheadto
Stop
0-00 9.1
0-10 5.9
0-25 3.8
0-49 2.4
1-29 1.4
2-05 1.0
min-s knots
Half Aheadto
Stop
0-00 7.1
0-13 4.6
0-33 2.9
1-05 1.8
2-00 1.0
min-s knots
Slow Aheadto
Stop
Stop from: Track
Reach, n.miles
Head Reach, n.miles
Side Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead 0.107 0.107 0.00000 2-10 0
Full Ahead 0.101 0.101 0.00000 2-08 0 Half Ahead 0.092 0.092 0.00000 2-05 0 Slow Ahead 0.080 0.080 0.00000 2-00 0
AUTOPILOT is turned off
Engine mode is Normal Environmental conditions during Manoeuvring Trial
Wind direction Wind speed Sea state Depth of water, m 0.0 0.0 0.0 1000

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
27
3.5. Deceleration performance
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 12.8
0-01 12.3
0-03 11.9
0-04 11.6
0-06 11.4
min-s knots
Full Sea Aheadto
Full Ahead
0-00 11.1
0-02 10.5
0-03 10.0
0-05 9.7
0-08 9.4
min-s knots
Full Aheadto
Half Ahead
0-00 9.1
0-02 8.5
0-04 8.0
0-07 7.7
0-09 7.5
0-12 7.3
min-s knots
Half Aheadto
Slow Ahead
0-00 7.1
0-03 6.5
0-06 6.0
0-09 5.6
0-12 5.3
0-15 5.2
0-17 5.1
min-s knots
Slow Aheadto
Dead Slow Ahead
Engine orders Track
Reach, n.miles
Time required,
min-s
Final course,
deg Full Sea Ahead to Full Ahead 0.021 0-06 0 Full Ahead to Half Ahead 0.022 0-08 0 Half Ahead to Slow Ahead 0.026 0-12 0 Slow Ahead to Dead Slow Ahead 0.028 0-17 0
AUTOPILOT is turned off Engine mode is Normal

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
28
3.6. Acceleration performance
0
0.005
0.01
0.015
0.02
0.025
n.milesTrack reach,
0-00 0.0
0-05 8.0
0-07 10.0
0-09 11.1
0-11 11.8
0-12 12.3
min-s knots
Stopto
Full Sea Ahead
Full Ahead ordered Speed, knots Track reach, n.miles Time, min-s Course, deg
2.0 0.000 0-03 0 4.0 0.001 0-04 0 6.0 0.003 0-05 0 8.0 0.005 0-05 0
10.0 0.010 0-07 0 12.0 0.023 0-11 0 12.2 0.026 0-12 0
8.0 0.061 0-52 20 9.0 0.096 1-07 32
10.6 2.537 14-59 180
AUTOPILOT is turned off Engine mode is Normal

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
29
4. MANOEUVRING CHARACTERISTICS IN SHALLOW WATER
4.1. Turning circle in shallow water (rudder set to 35 deg)
-0.1
0
0.1
0.2
0.3
Advance, cbls
-0.1 0.1 0.2 Transfer, cbls
0 min 16 s
5.2 knots 0 min 29 s
4.9 knots
0 min 41 s
4.8 knots
0 min 54 s
4.8 knots
8.8 knots
Maximum rudder angle used throughout turn
Water depth to draft ratio 1.2 Tactical diameter: 0.2 cbls Transfer at 90°: 0.1 cbls Advance at 90°: 0.3 cbls
Half Ahead

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
30
4.2. Squat
Shallow water
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
m
1 2 3 4 5 6 7 8 9 10 11Speed, knots
Squat
Stern
Bow
Water depth to draft ratio 1.2

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
31
5. MANOEUVRING CHARACTERISTICS IN WIND 5.1. Wind lateral forces and yaw moments (estimated)
Wind speed
Force, t Moment, tm
10 knots -0.0 -0.0 20 knots -0.0 -0.0 30 knots -0.0 -0.0
Wind speed
Force, t Moment, tm
10 knots -0.1 -0.3 20 knots -0.4 -1.2 30 knots -0.9 -2.6
Wind speed
Force, t Moment, tm
10 knots 0.1 0.3 20 knots 0.4 1.2 30 knots 0.9 2.6
Wind speed
Force, t Moment, tm
10 knots -0.2 -0.1 20 knots -0.8 -0.2 30 knots -1.8 -0.5
Wind speed
Force, t Moment, tm
10 knots 0.2 0.1 20 knots 0.8 0.2 30 knots 1.8 0.5
Wind speed
Force, t Moment, tm
10 knots 0.1 -0.3 20 knots 0.5 -1.2 30 knots 1.1 -2.6
Wind speed
Force, t Moment, tm
10 knots -0.1 0.3 20 knots -0.5 1.2 30 knots -1.1 2.6
Wind speed
Force, t Moment, tm
10 knots 0.0 -0.0 20 knots 0.0 -0.0 30 knots 0.0 -0.0

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
32
5.2. Course keeping limitation at Deep water
Rudder amount required to maintain course at following wind speeds, deg; Full Ahead
Relative wind direction, deg
15 knots 30 knots 45 knots 60 knots 0 0.0 0.0 0.0 0.0
45 -0.3 -0.8 -1.6 -2.4 90 -0.5 -2.0 -4.2 -6.6
135 -0.3 -1.5 -3.7 -6.9 180 0.0 0.0 0.0 0.0 225 0.3 1.5 3.7 6.9 270 0.5 2.0 4.2 6.6 315 0.3 0.8 1.6 2.4
5.3. Drifting under wind influence Drifting behaviour under wind influence (Stop)
Wind speed, knots Direction of drift, deg Rate of drift, knots 10 169 0.27 20 174 0.54 30 177 0.81 40 180 1.08 50 179 1.35 60 177 1.62
In Table 5.2 steady direction and rate of ship drift under wind influence are presented. Direction of drift is determined relativity wind direction.
Wind
Direction of drift
Rate of drift (ship speed)
Drifting under wind influence

Z-drive tug 1 (bp 53t) , v28
The information contained herein is proprietary to Transas Marine (UK) Ltd. and shall not be duplicated, used, or disclosed in whole or part for any functional other than to evaluate this quotation.
33
6. ADDITIONAL INFORMATION