Embed Size (px)
Citation preview

Zero and nonzero mean random vibration analysis of a new general hysteresis model
Mohammad Noori, Jong-Dae Choi and Hamid Davoodi
Mechanical Engineerin# Department, Worcester Polytechnic Institute, Worcester, M A 01609, USA
A new mathematical model to describe general degradation behaviour of hysteretic elements is presented. This nonlinear differential equation model is developed based on the constructive technique proposed earlier by Baber and Noori. The proposed model consists of a smooth hysteresis element, in series with a hardening spring element. Zero mean response statistics for a single degree of freedom system whose nonlinear restoring force component is described by this model, are computed by equivalent linearization and by the Monte Carlo simulation. The computed statistics are seen to be well estimated by equivalent linearization. Response analysis of the model under nonzero mean input excitation is studied. Approximate solutions in this case are obtained by subtracting mean responses from the governing stochastic differential equations and then applying equivalent linearization. Response predictions compare well with simulated response statistcs. The agreement is better than the results obtained by other general hysteretic models proposed earlier.
INTRODUCTION
The problem of predicting the inelastic dynamic response of structures has been investigated by numerous researchers. The practical importance of the problem stems from the fact that when subjected to extreme dynamic loading, such as earthquake ground motion, wave action, or extreme wind, a structure may undergo numerous cycles of inelastic response. During such motion, the accumulated structural damage may lead to significant deterioration of stiffness and strength. This type of response behaviour is normally displayed in form of hysteric restoring force-displacement characteristics. The exact nature of degration is a function of structural materials and configurations and varies from structure to structure. In order to predict the hysteretic degrading behaviour, mathematical models are needed that can -display the energy absorption, hysteretic restoring force response, and the resulting system evolution through degradation. Moreover, since the natural hazards mentioned are highly unpredictable, stochastic processes appear to be suitable excitation models. A considerable literature has thus been devoted to the response of hysteretic and degrading systems to random excitation. Recent surveys of the literature are available ~-6.
Because of the highly nonlinear nature of hysteretic systems, analysis of these systems under random excitation is difficult, hence a variety of approximate solution techniques have been explored. These include equivalent linearization 7-19, Gaussian and non-Gaussian closure techniques 2'2°-24, and numerical solution of the Fokker-Plank-Kolmogorov equations 25, and Wiener- Hermite series expansions 26. Of these techniques, the
Accepted September 1986. Discussion closes March 1987.
0266-8920/86/040192-1052.00 © 1986 Computational Mechanics Publications 192
most extensively utilized in the analysis of highly nonlinear systems is equivalent linearization. The theoretical basis for this method is well established, for both zero mean 7"t5"16 and nonzero mean 27 responses. This approach has been utilized in the analysis of hysteretic systems 9' 10.11,12,13,14,1 s,2 a, 29
Various types of piecewise linear or smoothly varying hysteresis have been developed by the researchers interested in the response of hysteretic systems to random or complex deterministic excitations. Baber and Wen 13, and Noori and Baber I 8 reviewed much of this work. The majority of the existing hysteresis models are either intractable to random vibrations analysis or are difficult to analyse without recourse to Kolmogorov-Bogoliubov approximation. Also a major limitation of these models is their inability to represent observed pinching of hysteresis loops. Various cases of this type of behaviour are cited in the literature 3°-3a. Hysteresis loop pinching that have been previously proposed do not appear promising for random vibration analysis. Recently Noori and Baber 18, and Baber and Noori ~° proposed a mathematical modelling technique for general hysteresis behaviour with random vibration application. They also presented ~°'~8 random vibration analysis of two models developed based on this technique. Herein, a new general degradation model is proposed which has been developed based on the proposed technique of Baber and Noori. This model incorporates the previous smooth hysteresis element by Bouc as modified by Baber and Wen (BBW) in series with a nonlinear hardening spring element. The form of the model is compatible with stochastic equivalent linearization, in the form suggested by Atalik and Utku 7 for stationary response and extended by Iwan and Mason for nonstationary response. Zero and nonzero mean analysis of this model are discussed.
Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4

FORMULATION OF SYSTEM HYSTERESIS MODEL
The nonlinear system to be studied herein is a SDOF oscillator as shown in Fig. 1. The motion u(t) of this system is given by
/i + 2~O~o~ +~o~u + (1 -~)og~z=a(t) (1)
In this equation two displacement dependent restoring components exist, the hysteretic restoring force z, and a cycle independent portion given by the aog~u term. a may be taken as the ratio of post-yield to pre-yield stiffness.
The hysteretic restoring force, is the BBW model which is written in the form
- ~ = { A u l - v U ~ l ~ , l l z l " - ' z + ~ , i , , I z l " ] ) l , ~ (2) where A, fl, y and n are shape parameters determining the type of hysteresis shape and v and r/ are additional response history dependent parameters which along with A, allow system deterioration to be accomodated. A, v and ~/are taken as linearly varying functions of element total energy dissipation, e(t). Detailed study of BBW model is reported elsewhere 2s.
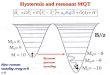
In order to incorporate hysteresis loop pinching, the examination of hysteresis loop behaviour as shown in Fig. 2 is performed. Study of dz/du versus z curves shown in Fig. 3(b) suggests the type of slope variation that needs to be incorporated in the model function. A detailed study of this slope behaviour which has been the basis for development of general modelling technique has been discussed in earlier work 1°'1s. The desired type of slope behaviour described in Fig. 3 has been achieved herein by adding a time-dependent hardening element as shown in Fig. 1 and 2(b) and is given by the analytic form
u2 = 2 tan- l (z/~) (3)
where z is defined by equation (2). In this model, parameter 2 controls the magnitude of
'slip' and severity of pinching, and ~ controls the rate of change of the pinching. Both parameters are defined as two linear functions of total energy dissipation, given by
;~ = 20 + ~ " ~(t)
~. = Go + ~¢ " e ( t ) (4)
L Oz - U - Ih
Fig. 1. SDOF system model
_1 -I
FItl I t
_l b j /-/1
Ca ) (b) (c) Fig. 2. Series hysteresis
d2/a~ Itt cycle
Znd
Cycle
s t a r t . J ¢ of 3 r 1:1~"
5 1 h , ~
0.0
Fig. 3.
Random vibration analysis: M. Noori et ai.
pt. a t which the slope reGehes Z i ~ theorigi~lthh~l in 2nd cycle. ~ _ . ~ / ~ /
* ,~=*. .w ,,,,,,,,=, T E T - / T 7 - ~ = * , . . ~ . slope (nodegrodotion) I/./ / / / ~ l i w t h e s l e e e builds
~ to o l lg im l l ' l eveL up
0 . 5 Z / Z u l t 1.0
(a) (b) Hysteretic loop-pinching behaviour and
corresponding effect on the variation of dZ/dU versus Z. (a) Variation of dZ/dU versus Z. (b) Cycles of loop pinching
dZ/dU 9 i
O
O
O
¢q b
0"0 0-2 0"4 0"6 Z/~.8=~ I ' 0
Fig. 4. Loop-pinching behaviour under cyclic input displacement and corresponding effect on dZ/dU versus Z for the model. 20=0.0 , ~o=0.35, 6a=0.2, and 6¢=0.0
where e(t) is given by
~(t) = (1 - ~ z (5)
Equations (1) through (5) complete the proposed model. The mathematical form of the model is suitable for linearized approximate analysis. Fig. 4 shows the dz/du versus z behaviour for the model which compares well with the suggested behaviour shown in Fig. 3(b).
Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4 193

Random vibration analysis: M. Noori et al.
NUMERICAL SIMULATION
In order-to investigate the capabilities of the proposed model in representing hysteretic pinching as well as general degradation behaviour, it is necessary to develop tractable schemes for numerical simulation of the model. It is noted that equation (2) contains derivatives on the right hand side, which are of the highest order of particular variable involved. If it is noted that fi, fi~ and fi2 all have the same algebraic sign, due to the absence of any intermediate mass between the BBW element and the hardening element, then this problem is remedied. Setting sgn(fi~)=sgn(fi) in accordance with the assumption gives, upon substitution of equation (2) and
u2 = f i - f i l (6)
into equation (3)
~ = ~1[ ,7 + [ ;41(;? + z2)] x { A - v [ p . sgn(fi)lzl"- 'z + lrl]}l (7)
Once fi~ is obtained in this manner, it is straightforward to obtain k by substitution into equation (2) and to obtain fi2 directly from equation (3) or by substitution into equation (6). Although equation (7) contains a derivative of u, it is not the highest order derivative of u in the problem, so numerical values are available in each time step. Thus equations (1) through (5), (6) and (7) form a set of simultaneous ordinary differential equations, suitable for numerical integration.
The excitation, a(t), in equation (1) may be any specifiable function. In this work, a(t) is taken as a Gaussian white noise.
RANDOM VIBRATION ANALYSIS OF THE SERIES M O D E L
Herein, random vibration application is presented for zero and nonzero mean excitation of the proposed model. The response statistics for the SDOF oscillator described by this model cannot presently be obtained in closed form. Thus, the linearized system models are derived by minimizing the mean square equation error in the linearized model in both cases.
-Stochastic Equivalent Linearization for Zero Mean Excitation
In the following, zero mean solutions by the method of equivalent linearization 7 for the proposed model are presented setting y~ =u, y2=fit, y3=z, y4=u~ and Y5 = u 2. Then the governing nonlinear equations may be written as
t l = Y2 (8a)
Y2 = - ct°92Y 1 - 2~C°oY2 - (1 - :t)to2y3 + a(t) (8b)
ta = 1 / q{ A t , - v[plt,I ly31"-~y3 +~ly31"t,]} (8c)
Y, = Y2 - Y5 (8d)
t , = 1/,1[~/(¢ ~ +y~)]
x { a t , - ~[fllt,I ly31"- ~y3 + rly3it,d } (8e) or in the matrix form
= O(Y) + a(t) (8f)
With zero mean response assumption, equations (8c) and (8e) can be replaced by the linearized forms
Ya = Ceay,, + KeaY3 (9a)
"y~ = Cest 4 + Kesy a (9b)
in which
Kei = E[ 89i(y)/Oya] (10a)
Ce,=E[89,(y)/dt,] i= 3, 5 (10b)
Under the assumption that Y3 and );'4 are jointly Gaussian, and given the response statistics a3, a~, and P34, coefficients Ce3 and Kea are evaluated in closed form. Evaluation of these two coeffients is given in Ref. 12. Expected values for Ce 5 and Ke 5 however, cannot be obtained in closed form. These expected values can be reduced to a single Gauss-Laguerre quadrature in this case and are evaluated numerically. Detailed derivations are given in Ref. 29. Equations (9) together with equation (8d) are rewritten in the following form in order to eliminate derivatives from the right hand side.
t3 = ICe3/(1 + Ces)]Y2
+ [Ke 3 - Ce3Ke 5/(1 + Ces)]y 3 (1 la)
t 4 = [I/(1 + Ces)]y 2 - [Ke/(l +Ces)]y3 (1 lb)
~;5=[Ces/(l+Ces)]Y2+[Kes/(l+Ces)]y3 (llc)
Equations (8a-b) and equation (11) form a set of simultaneous stochastic differential equations, which may be written as
~ + G y = f (12)
from which the covariance equation
g + G S + S G r = B (13)
for the zero time-lag covariance matrix S = E[y yr] can be derived. Procedure for the evaluation of G matrix and response statistics a 3, a4, and P34 at each time step is similar to the approach previously reported 1°'18.
Numerical Studies for the Zero Mean Case The numerical studies reported here were performed
with the following purposes: (1) To investigate the behaviour of the model under cyclic and general loadings; (2) To explore the relative validity of the approximate random vibration analysis of the proposed model by equivalent linearization, assuming zero mean response. In the studies reported, only the parameters 2 and ~ were degraded, since degradation of system parameters A, v and r/have previously been reported ~a'25.
To verify the type of degradation obtainable by this model, behaviour of the SDOF system of Fig. 1 under cyclic displacement, u~, was obtained by numerical integration, where A o = 1, fl = ~ = 0.5, 20 = 0.0, and ~o = 0.125. The deterioration parameter 6a=0.5, and 6¢ =0.0 were chosen, with all other parameters taken as constants. With ut(t) a known sinusoidal function, u 2, k, and fi all follow from equations (2), (3), and (6), following differentiation of Ul. Fig. 5(a-c) show the response of the BBW element, hardening element, and the resultant, which comprise the proposed model. To verify further the general degradation behaviour including pinching as well as stiffness and strength deterioration similar study was performed with 6A = 6~= 6~= 0.01 for BBW parameters, and ~o =0.05, 20=0.0, and 6¢=0.0, and 6~=0.2 for
194 Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4

o z 2
.u2 u . . o . o o . oo., . .. : . o
(a) (b) (c)
Fig. 5. Behaviour of model and its constituent elements under cyclic input displacement. (a) BBW element. (b) Hardening element. (c) Loop-pinching behaviour
Random vibration analysis: M. Noori et al.
o.
0"0
Z 1° 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1
0 -0.1 -0.2 -0.3 -0.4 -0.5 -0.6 -0.7 -0.8 -0.9
-1 -g --7 --5 --3 --1 1 3 5 7 g
Fig. 6. Combined strength, stiffness, and pinching degradation behaviour of the model under cyclic load
pinching control parameters. Fig. 6 shows the result. Behaviour of the system of nonlinear differential equations (1)-(5) was also verified under general excitation. For this, several cycles of single sample plot of z versus u were obtained under white noise excitation. Plot of a run for Go = 0.15, 6e = 0.0, 2 o = 0.0, and 6~ = 0.2 is shown in Fig. 7. In all cases shown, the damping ratio ( = 0.1. The plot of Fig. 7 is rough since it is obtained based on limited number of data points, but the anticipated bchaviour can be observed.
In random vibration studies, nonstationary response statistics were obtained under stationary white noise input beginning at zero initial conditions. Filtering and modulation of the input noise can be easily incorporated into the model.
The approximate response of a SDOF system of the model was obtained using several values of input power spectral density, K o. In the studies for the computation of zero time lag covariance matrix, 'high' pinching with parameter values of 2 o = 0.0, 6a = 0.5, Go = 0.125 and ~ = 0.0 were considered. A system viscous damping ratio of ( = 2 per cent was chosen and parameter values of A o = 1, fl =7 = 0.5 were used. Simulated response estimates were obtained via 250 samples of Monte Carlo simulations. RMS displacements, tr,, and velocities tr.~ compare well at all levels of excitation, as shown in Figs 8 and 9. RMS response prediction for the restoring force, a z is in very good agreement with the simulation at low excitation levels, but at high levels of excitation the response is slightly underestimated in the first few seconds. This is shown in Fig. 10. The constituent element RMS displacement, a,~, is reasonably well estimated for all
Fig. 7. Pinching behaviour of the model under white noise input. PSD=0.5 o (7 o [ HIGH P INCHING 3
A " L I N E A R I Z A T I O N
o - S I H U L A T I O N PTS
• / ' " " "'" PSD - 1 . 0
? 0 N
PSD - 0 , 5
0 PSD " . 0 2 6 • •
0.0 30.0
Fig. 8. Nonstationary RMS displacement response of SDOF system under stationary white noise input 0 ( ~ [ HIGH P I N C H I N G "1 (~)' _ . . . . . . . . . . . . . . . . o,
, k - L ] N E A R | Z A T I O N .. ' . ." " o - $ 1 H U L A T ] O N ~ PSD - 1 , 0
PSD - 0 , 5
0
• o °'°%° . . . oPO.°"
o°,, . . . . ~° " . . , l ° " - " . ,_ " ° ° ° ' - PSD - , 1 0
_ • oo ~ ° % , ooo,o°o°o ~ , , . a . _ ~ . . . - - - : . . - . - . . . . . . . - " ° " . . . . . . " " . . . . . . . . . . . . PSD - . 0 2
0 - 0 3 ( ) ' 0 T 6 0 . 0
Fio. 9. Nonstationary RMS velocity response of SDOF system under stationary white no~e input
PSD - . 1 0
T 6 0 . 0
Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4 195

Random vibration analysis: M. Noori et al.
excitation levels. This can be observed from the plots shown in Fig. 11. The system degradation, as measured by the total energy dissipation, #, agrees well with the simulation results at all levels of excitation. This behaviour is illustrated in Fig. 12.
Equivalent Linearization of the Model - Nonzero Mean Excitation
Consider again the SDOF oscillator as described by equations (1) through (5). In this case a(t) is, by assumption, a nonzero mean input stochastic excitation. The system degradation is energy based. The same form may be used for numerical simulation and equivalent linearization.
The governing equations (1) through (3) may be written as
vl = v2 (14a)
b 2 = - ~xo~2v t - 2~O9oV 2 - (1 - ot)o92vs + a(t) (14b)
f~ ,~ = v2 - v5 (14(t)
~ = I-~/(~ ~ + v~)]
× (a~.-~[~l~. l Iv~l"-%+y~.lv~l']~/, (14e) where
v~=yi+ui, i = 1 , 2 . . . . . 5 (15)
Taking the expected values of equation (14) gives
/Jl =#2 (16a)
~2 - ~ - - - C t ( ' D 2 # 1 - - 2(0°o#2 - (1 - g)o9~#3 + # . (16b)
ira = { f i4 - v [ f l E , -.I- TE2] }/r/ (16c)
/J4 =#2 - f i s (16d)
fi5 = 2~{AE3- riflE4 + 7E5]} (16e)
where
#= = nonzero mean for input excitation
E~ = E[It3,,lv 31" + t v 3] (17a )
E2 :gE~,lv31"] (lYb)
Ea = E[134/(~ 2 + v2)] (17c)
E,,-- EEle,I Iv31" + 'v~/(¢~ + vg)3 (17d)
E~ = El~,lv~l"/(¢: ÷ vg)] (17e)
Subtracting equations (16) from (14) yields the nonsymmetric zero mean problem
Yl =Y2 (18a)
Y2 = - ~°ggYl - 2;°9oY2 - (1 - ct)ogy 3 ÷ a(t) (18b)
~3={A;,-v~[PI~,+~,ItY~+#~)IY3+#31" -~
- E a] +)'[(P,~ +/J4)IY3 ÷ #31n - - E23~ }/n
(18c)
(18d)
p~ = (Z~ /n ){A[ ty , + ~ , ) / t y3 + #3) 2 - E3]
- v [ P l P , + # , l lY3 + #31"-1 (Y3 + #3)/ (~2 + (Y3 ÷ # 3 ) 2) -- E,]
+ v[(p, + ~,)ly3 + #31"/(~ 2 + (Y3 ÷ #-/3) 2) - Us]} (18e)
d
d
/% -
(")'Z [ HIGH PINCHING 3 " : ' . a = LINEARIZATION
• • o= SIMULATION PTS • OoO~ to ; ,
PSD = I .0 PSD = u, 5 PSD - .I0
PSD = .02
9 00. 0 , 30'0 T 60-0 Fig. 10. RMS prediction of the restoring force of SDOF system under stationary white noise input
0 O. O'u2 E HIGH PINCHING J
a • L I NEARI ZATION o= SIMULATION PTS
o.0" , ..o.,..,..,,..... *.,.."", PSD - I . 0
o,,I 1 .'" ............ "" .,.,,'*'""'"", ~ PsDPSD •• 0.5,10
0 PSD = .02 (5
o.o 30.0 i 66.0 Fig. 11. Nonstationary RMS displacement response for the S-L element under stationary white noise input
0 ~.~ E HIGH PINCHING "1 b
A• LINEARIZATION PSD • I .0
.j................iiiiiiiiiiiiiiiiiiii o .
PSD 1 o J
0 PSD .02 b
0.0 30.0 T 60.0 Fig. 12. Variation of dissipation energy for SDOF system model under stationary white noise input
196 Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4

In equations (18), El, i= I, 2, 3, 4, 5 can be rewritten as functions of Yi by appropriate substitution.
If the Yi are assumed to be jointly distributed Gaussian random variables, at time t, then the nonlinear equations (18c) and (18e) can be replaced by the equivalent linearized forms
Ya = C'eaY4 + K'eay3 + v/~l[flE1 + "YE2] (19a)
Y5 = C'esy,, + K 'esys - 2~/(q{AE3- v[[3E4 + yEs]}) (19b)
where
C'e, = E{bh,(y3, .~,, )/t~j;4 } (20a)
K'ei = E{Oh,(ya, ~,4)/Oy 3) i= 3, 5 (20b)
in which h~'s are the right hand sides of equations (18c) and (18e).
It is apparent that the expected value/i 4 appears on the right side of equations (16) and (18). Moreover the second order response statistics try2= E[.~4] 2 and P3a = E[yaY4]/ (tr 3ira) are required, along with/~a to evaluate the expected values in equations (17) and (20). In short, ~t~, and th 2 and P3~ are implicit variables, which must be determined by iteration, before solution can be proceed at each time step. Procedure for the evaluation of these statistics is similar to the technique used in the nonzero mean analysis of a slip-lock pinching model proposed by Baber and Noori and is discussed in Ref. 18.
Equations (18)can be symbolically written in matrix form as
y + G ' y = a * (21)
Post multiplying (21) by yr, taking the expected values and adding the result to its response gives the covariance equation defined by (13). Equations (13) and (16) may be jointly solved by numerical integration, for the response statistics /a v and S. Hence, it remains to evaluate the expected values given in (17) and (20). These require the joint one time distributions ofy a and .v4. Assuming that Y3 and Y4 are jointly Gaussian, it is necessary to have/~3, a3, /J4, th, and P34, in order to evaluate the expression at each time step. /a a and tr 3 are obtained from the previous numerical integration step. Procedure for evaluating the remain three statistics is discussed in detail in Ref. 18. Detailed derivations of the expected values in equations (17) and (20) are given in Appendix I. All these expected values have been evaluated by numerical integration using multipoint double-sided Gauss-Laguerre quadrature method.
In this study, system degradation is obtained utilizing energy based parameter adjustment. For simulation, these energy based degradation equation along with equations (1)--(5) complete the set to be solved. If variation of degradation parameters is slow, these parameters may be replaced by their expected values at any time step. Hence, by first order approximation expected values #4,/~, #a, and/a¢ replace the degradation parameters A, q, v, 2, and ~ in the governing equations.
Numerical Studies For the Nonzero Mean Case
In these studies the behaviour of the system described by nonlinear differential equations (1)-(5) under general excitation was first verified. Fig. 13 shows the plot of a run for the case of high pinching with parameter values of ~o=0.35, 6~=0.0, 20=0.0 , and 62=0.095 under a nonzero mean stationary white noise input with an
Random vibration analysis: M. Noori et al.
excitation mean of/~a= 0.1 and power spectral density level of 0.4.
To demonstrate the equivalent linearization analysis for nonzero mean excitation of this model, the response of a SDOF system was considered. These analyses consider pinching degradation only since including other types of degradation add no additional complication. In these studies system parameters of A o = qo = Vo = n = 1, fl = ? = 0.5, ~t = 0.4762, tno = 1, and r = 2 ~o were used. The power spectral density for the input excitation was set at K o = 0.i, Ko=0.2, and Ko=0.4. The excitation mean /~, varied from 0.2 to 0.6. For the system modelled, these excitation means correspond to 20~o to 60y/o of the limiting magnitude of the hysteretic restoring force upon first loading. The constant mean and input noise excitations were applied to the system at t = 0.
Approximate response statistics for SDOF system obtained by equivalent linearization are presented in Figs 14-24. In these studies several levels of excitation with two different pinching rates for each case was considered. The statistics in this case were obtained for a duration of t = 100 seconds. The results reported here are for the case
t")
~.0
Fi9. 13. Pinching behaviour of the model under nonzero mean stationary white noise input
P S D • 0.4
o
2o 4~o T
Fig. 14. First order statistics o f system displacement under nonzero mean stationary white noise
Probabilistic En9ineering Mechanics, 1986, Vol. 1, No. 4 197

Random vibration analysis: M. Noori et al.
of high pinching with pinching parameters Go = 0.35, 6~ = 0.0, ;~0 = 0.0, and 62 = 0.095, and power spectral density of K o = 0.4. In these plots, the solid lines correspond to the linearization results, and the dotted lines represent the response analysis via 250 samples of MCS. Fig. 14 shows mean response computation for total displacement, p=. The linearized response estimate agree well with Monte Carlo simulation for all excitation mean levels. For #o = 0.6, the response is slightly underestimated. Plots shown in Fig. 15 illustrate the mean velocity responses, #=. There is also a good agreement between the results in this case for all levels of excitation mean values. Fig. 16 shows the mean responses for the restoring force. The results in this case also show a good agreement for all levels of excitation mean values. The comparison between the approximate and simulated responses for the mean of the smooth element component are illustrated in Fig. 17. Comparison between the simulated and the approximate responses shows a very good agrrement for all levels of input excitation mean values. Fig. 18 shows similar results for the mean responses of the hardening element. A good agreement is observed between the linearization and simulation results at all levels of excitation mean values. Mean responses for the energy dissipation is shown in Fig. 19. Comparison between the approximate and simulated responses shows a very good agreement for all levels of input excitation mean values.
0.45
#o 0.4
P S D = 0 . 4
035
0 "6
0.3
0.25
0,2 4 z~ A
0.15 t , A
0.1
0.05 0
o I , ~ n - o ,o " , o 20 0 0 - - ~ a T o 4°o
Fig. 15. Mean response for system velocity under nonzero mean stationary white noise
0.35
0.3 P S D - 0 . 4
0.2 ~' A
A A A
0.15 ~"
o.1 A ~ A A A ~X
0'01
r J
o 20 4O T
Fig. 16. Mean response of restoring force under nonzero mean stationary white noise
7
6
5
4
3
P S D ' 0 " 4
a / ~ o.6 ~'/AA j ~ . O . 4 ~ 0 ~ A A 0
0 A A A 0
1
o 20 40 T
Fig. 17. Mean response for BBW element displacement under nonzero mean stationary white noise
0.1
/ JU2
o
--0.1
-0 .2
-0.3
--0.4
--0.5
--0.6
--0.7 -
P S O . O ' 6
- ~ \ " - ,~ z , , a 0"2
0 0
0 0 n
0 o ° 0 0 0
' ; 0 0--4o 0 0 T 0 20 0 0 O 0 0 0
0
Fig. 18. Mean response for hardening element under nonzero mean stationary white noise
1, o~"
'~ 06 o .7 z¢: ~
7
~ i - i f r 20 40 T
Fig. 19. Mean response of energy dissipation under nonzero mean stationary white noise
RMS response statistics are presented in Figs 20-24. As Fig. 20 indicates there is a good agreement between the simulation and linearization estimates of a,. Fig. 21 shows the comparison for RMS velocity response. Prediction of tr., by linearization agrees well with the simulated responses. As Fig. 22 indicates for the restoring force, the RMS responses are slightly underestimated,
198 Probabilistic Engineering Mechanics, 1986, Vol. I, No. 4

however, the trend of the response is well predicted. As these results indicate, the agreement is better for lower values of input excitation mean. Prediction of a=, is in good agreement with the simulated ones. This is illustrated in Fig. 23. For the RMS response of u2, the linearized results agree well with the simulated responses for lower values of input mean excitation. At higher levels of mean excitation, a slight overestimation can be observed. These results are illustrated in Fig. 24.
The numerical studies reported here, apply to the situation where the mean and random loads are from the
lO
%,
8
7 -
6 -
5 -
4 - -
3 -
2 -
1
0 i
0 20
Fig. 20. Nonstationary RMS displacement under nonzero mean stationary white noise
0.4 / ' ~ , , ~ ' / . ~ _ ~ _ ~ - • .
i i i 4O T
response
2 . 8
2,6
O'U 2.4.
2.2
2
1.8
1.6
1.4-
1.2
1
o.8
0.6
0.4.
0.2
o
Fig. 21
A S b S ~ -
P S D = 0 ' 4
i i i E
20 4o T
Nonstationary RMS velocity response under nonzero mean stationary white noise
0.6
CTz 0.8
0.4
0.3
0.2
o,1
~ e66 ©e~6 ¢~Q e~6 Q9 Q~
P S D - 0 " 4
o i , i ,
2 0 4 0 T
Fig. 22. RMS response of hysteretic restoring force under nonzero mean stationary white noise
Random vibration analysis: M. Noori et al.
crul 3 2 . 8
2.6
2.4
2 . 2 -
2 -
1 . 8 -
1 , 6 -
1 . 4 -
1 . 2 -
1 -
0 . 8 -
0 . 6 -
0 .4 - -
0 . 2 -
0
23.
~2~QgQOog~OoOooo[
0 - 0 " 4 / ~ 0 . 4
Fig. under nonzero mean stationary white noise
2O 4.O T
RMS displacement response of BBW element
6
8 - 0 " 6 0 - -
4 - 0 . 4
A A A A
3 - .
0 i i i i i
20 4O T
Fig. 24. RMS Displacement response of hardening element under nonzero mean stationary white noise
same source. In a more general case, the mean and random loads may have different origins. Such is the case for the gravity-seismic ground motion, or current-wave action combinations. In such situations, the equilibrium state under the mean excitation alone is taken as the initial condition for random vibration analysis. This condition is not considered here.
SUMMARY AND CONCLUSIONS
A simple mathematical model capable of representing general hysteresis behaviour, as a function of energy dissipation is presented. The model is developed based on the modelling technique proposed by Baber and Noori. This model consists of BBW smooth hysteresis in seris with a new hardening type element. Bchaviour ofa SDOF system of this model under cyclic and general loading was studied. The obtained results indicate the versatility of the model in reproducing various types of general degradation including pinching behaviour.
The random response analysis of the model was then considered. With the assumption of gradual degradation, the model which has a suitable form for random vibration applications, can be linearized for approximate solution by equivalent linearization technique. Response predictions for a SDOF system of this model were obtained for both cases of zero mean and nonzero mean input excitation.
Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4 199

Random vibration analysis." M. Noori et al.
For the zero mean case, the RMS response predictions of the linearized model for displacement, velocity, hysteretic restoring force, and the displacement of the two const i tuent components are good for all degradat ion and excitation levels considered.
The hysteretic energy dissipation was closely modelled at all excitation levels.
In nonzero mean analysis, the response of a S D O F system under nonzero mean s ta t ionary Gauss ian white noise was studied. The nons ta t ionary responses are obtained by numerical integrat ion of the linearized equations. Mean responses for displacement, velocity, restoring force, the displacement of const i tuent elements, and energy dissipation are in good agreement with Monte Carlo s imulat ion. RMS displacement response prediction is good for the velocity but the RMS displacement and restoring force responses are slightly underest imated. The agreement between the approximate and simulated responses are good for BBW element componen t but the results for the hardening element show slight overestimation at higher levels of excitation. At all levels, the linearized model predicts the response trends of the system reasonably well.
ACKNOWLEDGEMENTS
This work was supported in part by Gran t No. CEE81- 12584 from the Nat iona l Science Founda t ion . The authors also acknowledge the technical help of Ms Amabel Yee, Mr Rajeev Kelkar and Mr Dona ld Farley in preparing this paper.
REFERENCES
1 Crandall, S. H. and Zhu, W. Q. Random vibration: A survey of recent developments, J. Appl. Mech. ASCE, December 1983, 50, 953-962
2 Ibrahim, R. A. Parametric random vibration, Research Studies Press, Ltd, Letchworth, England, 1985
3 Spanos, P-T. D. Stochastic linearization in strucutral dynamics, Appl. Mech. Rev., 1981, 34, 1-8
4 To, C. W. S. The response of nonlinear structures to random excitation, Shock and Vib, Dio., 1984, 16(4), 13-33
5 Vanmarcke, E. H. Some recent developments in random vibration, Appl. Mech. Rev., 1979, 32(10), 1197-1202
6 Capecchi, D. and Vestroni, F. Steady state dynamic analysis of hysteretic systems, J. Eng. Mech., ASCE, December 1985. 111(12), 1515-1531
7 Atalik, T. S. and Utku, S. Stochastic linearization of multidegree of freedom nonlinear systems, Earthq. Eng. Struc. Dyn., 1976, 411-420
8 Baber, T. T. Nonzero mean random vibration of hysteretic systems, J. Eng. Mech., ASCE, 1984, 110(7), 1036-1049
9 Baber, T. T. Nonzero mean random vibration of hysteretic frames, submitted for publication to Computers and Structures, 1985
10 Baber, T. T. and Noori, M. N. Modelling general hysteresis behavior and random vibration application, ASME Design Engineering Division Conference on Mechanical Vibration and Noise, Cincinnati, Ohio, September 10-13, 1985, ASME Paper No. 85-DET-18
11 Baber, T. T. and Noori, M. N. Random vibration of degrading structures with pinching hysteresis, Proceedings, ASCE, Eng. Mech. Div. Specialty Conference on Probabilistic Mechanics and Structural Reliability, Berkeley, California, January 11-13, 1984, 147-150
12 Baber, T. T. and Noori, M. N. Random vibration of degrading, plnchlng systems, ASCE, J. Eng. Mech., August 1985, 111[8), 1010--1026
13 Baber, T. T. and Wen, Y. K. Random vibration of hysteretic, degrading systems, J. Eng. Mech. Div., ASCE, Proc. Paper, 16712, December 1981, 107(EM6), 1069-1089
14 Baber, T. T. and Wen, Y. K. Stochastic response of multistory yielding frames, Earthq. Eng. Struc. Dyn., 1982, 10. 403-416
15 Iwan, W. D. and Krousgrill, C. M., Jr Equivalent linearization for continuous dynamical systems, d. Appl. Mech. Transactions. ASME, 1983, 50, 415-420
16 Iwan, W. D. and Mason, A. B., Jr Equivalent linearization for systems subjected to non-stationary random excitation, Int. Non-Lin. Mech., 1980, 15, 71-82
17 Kazakov, I. E. Statistical analysis of systems with multi- dimensional nonlinearities, Automm. & Remote Cntrl., 1965, 26, 456-464
18 Noori, M. N. and Baber, T. T. Random vibration of degrading systems with general hysteresis, Department of Civil Engineering, University of Virginia. Technical Report on Research Grant No. CEE81-12584, National Science Foundation, September 1984
19 Spanos, P-T. D. Stochastic linearization method for dynamic systems with asymmetric nonlinearities, Report EMRL No. 1126, Engineering Mechanics Research Laboratory, University of Texas at Austin, Texas, September 1978
20 Beaman, J. J. and Hedrick, J. K. Improved statistical linearization for analysis and control of nonlinear stochastic systems: Part 1: An extended statistical linearization technique, J. Dyn. Sys., Meas. and Cntrol., Transactions ASME, March 1981, 103, 14-21
21 Crandall, S. H. Non-Gaussian closure for random vibration of nonlinear oscillator, Int. J. Nonlin. Mech., 1980, 15, 303-313
22 Dash, P. K. and Iyenger, R. N. Analysis of randomly time varying systems by Gaussian closure technique, J. Sound and Vib., 1982, 83(2), 241-251
23 Ibrahim, R. A. and Heo, H. Autoparametric vibration of coupled beams under random support motion, ASME, Design Engineering Division Conference on Mechanical Vibration and Noise, Cincinnati, Ohio, September 1985, 10-13
24 lbrahim, R. A. Soundararajan, A. and Heo, H. Stochastic response of nonlinear dynamic systems based on non-Gaussian closure, ASME, Winter Annual Meeting, Miami, Florida, November 17-21, 1985, No. 85-WA/APM-6
25 Spencer, B. F., Jr and Bergman, L. A. On the reliability of a simple hysteretic system, J. Eng. Mech, ASCE, December 1985, 111(12), 1502-1514
26 Jabedi, A. and Ahmadi, G. Application of Wiener-Hermite expansion to non-stationary random vibration of a during oscillator, J. Appl. Mech., ASME, June 1983, 50, 436-442
27 Spanos, P. T. D. Formulation of stochastic lineariztion for symmetric and asymmetric MDOF nonlinear systems, J. Appl. Mech., Trans., ASME, March 1980, 47(1), 209
28 Baber, T. T. and Wen, Y. K. Stochastic equivalent linearization for hysteretic, degrading multistory structures, Civil Engineering Studies, Structural Research Seris No. 471, University of Illinois at Urbana-Champaign, December 1979
29 Noori, M. N., Choi, J. D. and Davoodi, H. A new hysteresis model for random vibration of degrading systems, Proceedings, Southeastern Conf. on Theo. & App. Mech., XIII, University of South Carolina, Columbia, South Carolina, April 1986, 2, 522- 530
30 Keshavarzian, M. and Schnobrich, W. C. Inelastic analysis of reinforced concrete coupled shear walls, Earthq. Eng. & Struc. Dyn., 1985, 13, 427--448
31 Newmark, N. M. and Rosenblueth, E. Fundamentals of earthquake engineering, Prentice-Hall, Inc., Englewood Cliffs, NJ, 1971
32 Park, R. and Paulay, T. Reinforced concrete structures, John Wiley and Sons, New York, NY, 1975
33 Sozen, M. A. Hysteresis in structural elements, Appl. Mech. in Earthq. Eng., ASME Annual Meeting, Appl. Mech. Div., 1974, 8, 63-98
APPENDIX I
Evaluation o f expected values in equations (17) and for the linearized coefficients in equation (20)
The expected values in the linearized coefficients C'e 3 and K'e 3 and Et and E 2 in equat ion (17) have been previously derived ta. The following expected values need
200 Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4

to be evaluated.
E~ = E[CP, + ~,)/(~ + ~y~ + m~)]
E. = E[tk. + ~.1 ly~ +,~1"-' × 00~ + m)/(~ ~ + ~y~ + m ] : ) ]
E 5 = E[(~,, + ~4)1 [Ya + #31"/(~ 2 + [Y3 + #3~2)]
K'e5 = E[Oh5 (Y3, k4)/OY3] (I. 1)
Using the relation for degradation control parameter A, v, and r/given in Ref. 12, and using the relation for 2 and given by equation (4) allows that Ce5 and Ke5 be written in the forms of
c'~ =u~u~[u~E,o-~E,, +~E,d/m Ke5 = #a#¢[ - 2paE t 3 + 2#~flE 14 + 7E 15
-- ~v(flE 16 + ~EI 7) ] /~ . (I.2) where
E, o = E[I/(~ 2 + [Ya + P3~2)]
E,, = E[(y3 + ~3)[Y3 + #3["-' sgn(~, +/~4)/
(¢~ + ~y3 + u3~2)]
~ ,~ = E[ly3 + m l / ( ¢ 2 + ~y~ + m~2)]
E, ~ = ~[(Y~ + m ) ( ) , + ~,)/(¢2 + ~y3 + u3~)z ] E14 = E[lY~ + #~[" + '[:v, + k,I/(~ 2 + ~y~ + .3~2)2]
El5 = El(Y3 + U3)IY3 + fl31"(.~4 + fi4)/
E16 -'~ E[HlY3 + [A3[n-ltY,$ + ~4]/(~ 2 + flY3 "]- f13]] 2) 2]
El"/= E[n(y3 '+ f13)[Y3 "Jr- #3[ n - 2Q~4. "4- ~4)/
(~2 + ~y3 +#3~2) ] (1.3)
The expected values given by equations (I.1) and (I.3) are evaluated as follows
E3 = ((7~/X//~) T3((3)[ P((3 - f13) +fla] dC3 co
E , = (~1 o4/,/S~) l¢~1" - 'C3 T, ((3)Ta(~r3) dCa --CO
E;--(~ad,y~) f /+ 1C31"T3(C3)
x [P(C3--fl3)+fl4] d(3
Random vibration analysis: M. Noori et al.
El 0 = ( I /x /~) T3((3) d(3 CO
El l = ( a 1(3]"- 1(3 Z3(Ca)Zm((3) dC3 co
CO
L E13 = (O'30"~,/N/~-) C3 T4(C3) CO
x [o(C3-/h)+~d tiC3 ~CO
E~4 = (~+ ' a~/x /~) IC3[" +i T4(CB)TI (C3) dC3 - - C O
*0(3
E~6=n(o'na-i(7:~/x//~) 1(3["- ~ ra(ca)Z1((3) dC3 --co
~co
El 6 = (~3+ l(7"/X/~ ) C31C31"T4. - - c o
x (C~)[ 0(C~-~3)+~4] dG
e,, = ( .~- '~a/v~)f~co c:tc:l"-2T3
x (C3)[ P(Ca - fl a) + fla] dCa (1.4)
in which
/~3 = ~3/'~3 /~4=~4/,~4
C3 = b'3 + u3)/.3 P = P34 (I.5)
T~ (C a)= ( v / ~ ) l - ~ a , exp[ - Ep(Ca - fl a) + fl4~2/
~2(I - p~)~ + { p(C~ - ~ ) + t~4}
x {I - 2 erf E - [ P(C3- f13) +fla]/x/1 - pm~ }
T2 (C3) = I - 2 erf E - P(C3 - f13) + fl~/x/1 - pm~
Ta(Ca) = [I/(C 2 + amcm)] exp - (C 2 - fl2)/2]
T4(G) = [ I/(~ 2 + amc~) 2] exp[ - (C 2 - fla)2/2]
where erf(- ) is the error function.
(I.6)
Probabilistic Engineering Mechanics, 1986, Vol. 1, No. 4 201