Embed Size (px)
Citation preview

1
Znajdowanie
najlepszej drogi

2
Algorytmy znajdowania najkrótszych ścieżek
Ø Właściwości najkrótszych ścieżek
Ø Algorytm Bellmana-Forda
Ø Algorytm Dijsktry
Literatura
– Cormen, Leiserson, Rivest, “Wprowadzenie do algorytmów”, rozdz. 25
3
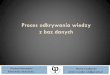
Grafy z wagami - powtórzenie
Ø Grafem z wagami nazywamy graf, dla którego każdej krawędzi przypisana jest waga (koszt): w(vi, vj) > 0.
Ø Każdy graf może być traktowany jako graf z wagami – jeśli przyjąć wagę 1 dla każdej krawędzi. Dodatkowo jeśli wierzchołki nie są połączone to można przyjąć, że krawędź łącząca je (nieistniejąca) ma wagę ∞.
7
1 2 3
4 5 6
4
2
8 1 5
Koszt ścieżki = suma kosztów krawędzi ją tworzących:
( ) ( )∑k
1=ii1i v,vw=pw
4
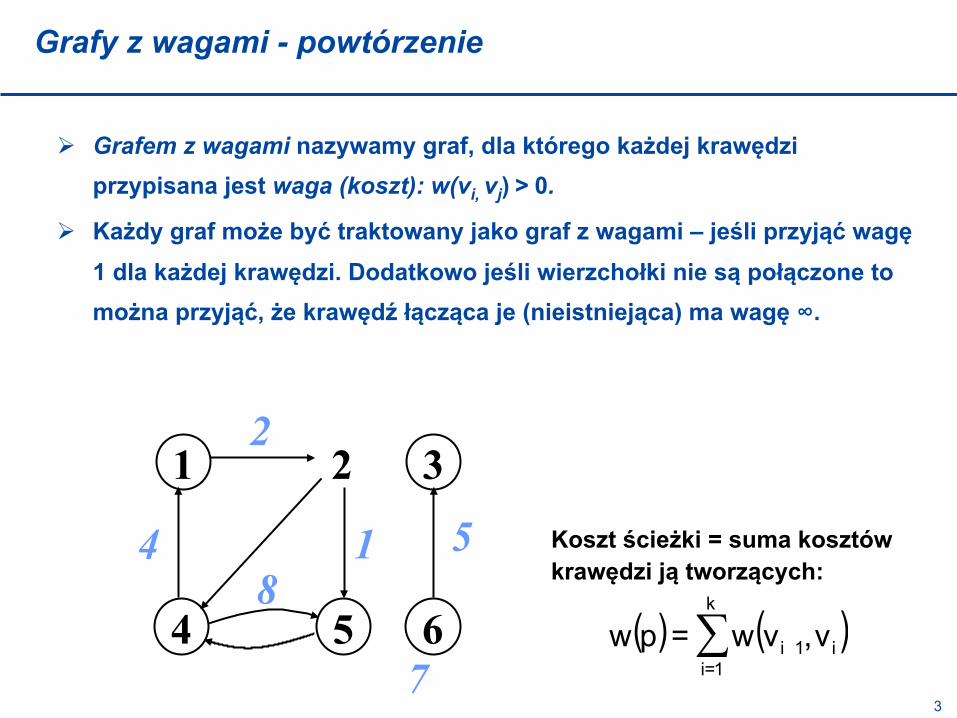
Przykład grafu z wagami
1
2
10
5
2 3
4 6
9
7
s
a b
c d

5
Dwie podstawowe własności dla najkrótszych ścieżek
Nierówność trójkąta
niech G=(V,E) będzie skierowanym grafem z wagami, w: E à R funkcją kosztu, a s∈V wierzchołkiem początkowym. Wtedy dla każdej krawędzi e=(u,v)∈E:
δ(s,v) ≤ δ(s,u) + w(u,v)
Struktura optymalnej ścieżki
niech p = <v1, .. vk> będzie najkrótszą ścieżką pomiędzy v1 i vk. Wtedy jej podścieżka pij = <vi, .. vj>, dla 1 ≤ i,j ≤ k, jest najkrótszą ścieżka pomiędzy vi i vj.
6
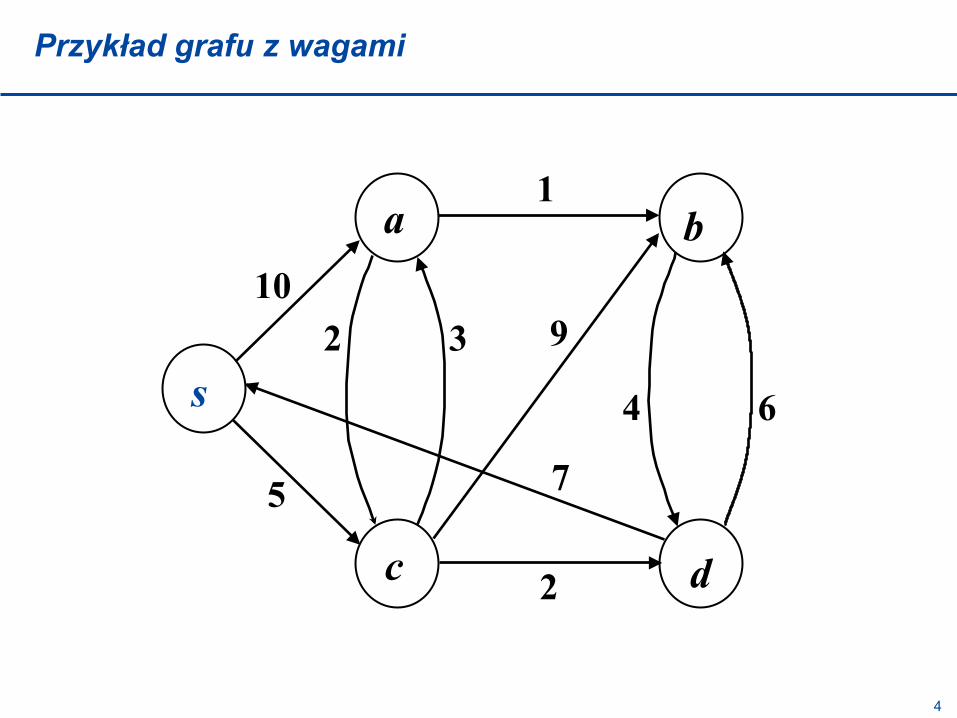
Krawędzie o ujemnych wagach
Ø W niektórych zadaniach mogą pojawić się koszty ujemne. Najkrótsze ścieżki są dobrze zdefiniowane tylko dla zadań z nieujemnymi kosztami ścieżek – jeśli dopuścimy koszty ujemne każda droga może być pomniejszona poprzez dodanie cyklu o wartości ujemnej
Ø Można dopuścić ujemne wagi, ale nie można cykli o koszcie ujemnym (w przykładzie a->b->c->a ma koszt -1)!
-5
1 3
a b c 10
c -1

7
Najkrótsze drogi, a cykle
Ø Najkrótsza ścieżka pomiędzy dwoma dowolnymi węzłami nie zawiera cykli.
Ø Reprezentacja najkrótszych ścieżek pomiędzy wybranym węzłem, a wszystkimi pozostałymi jest taka sama jak dla drzewa (podgrafu poprzedników) w BFS (breath-first tree):
Gπ = (Vπ ,Eπ) takie, że Vπ = {v∈V: π[v] ≠ null}∪{s}
i Eπ = {(π[v],v), v∈V –{s}}

8
Przykład drzewa najkrótszych ścieżek – 1
6
6
3
5
2 1
2 7
4
3
s
a b
c d
3 9
0
5 11

9
Przykład drzewa najkrótszych ścieżek – 2
6
6
3
5
2 1
2 7
4
3
s
a b
c d
3 9
0
5 11
10
Metoda kolejnych przybliżeń
Ø Podobnie, jak dla BFS (dla grafów bez wag) przechowujemy etykietę, która jest kolejnym przybliżeniem kosztu najlepszej drogi z s do v.
Ø Początkowo, dist[s] = 0 oraz dist[v] = ∞ dla wszystkich v ≠ s, π[v] = null.
Ø Dla kolejnych iteracji algorytmu: dist[v] ≥ δ(s,v).
Ø I na koniec: dist[v] = δ(s,v) i (π[v],v) ∈ Eπ

11
Relaksacja
Ø Proces relaksacji krawędzi (inaczej osłabiania ograniczeń) (u,v) polega na sprawdzaniu, czy możemy poprawić najlepszą ścieżkę z s do v jeśli droga będzie wiodła przez wierzchołek u.
Relax(u,v)
if dist[v] > dist[u] + w(u,v)
then dist[v] ß dist[u] + w(u,v)
π[v] ß u
12
Własności relaksacji
Nierówność trójkąta
∀e = (u,v)∈E: δ(s,v) ≤ δ(s,u) + w(u,v)
Własność ograniczenia górnego
∀v∈V: dist[v] ≥ δ(s,v)
Własność braku drogi
jeżeli nie istnieje droga z s do v, to: dist[v]= δ(s,v) = ∞

13
Własności relaksacji
Własność zbieżności
jeżeli s àuàv jest najkrótszą ścieżką w G dla pewnego u i v, oraz dist[u]= δ(s,u) zawsze przed wykonaniem relaksacji krawędzi (u,v), to również dist[v]= δ(s,v) zawsze po relaksacji.
Własność relaksacji ścieżki
niech p = <v0, .. vk> będzie najkrótszą ścieżką pomiędzy v0 i vk. Jeżeli relaksacja krawędzi jest przeprowadzana w kolejności (v0, v1), (v1, v2), … (vk-1, vk), to dist[vk]= δ(s,vk).
.
14
Algorytmy wyznaczania najkrótszych ścieżek
1. Algorytm Bellmanna-Forda
2. Algorytm Dijkstry – uogólnienie BFS
15
Algorytm Bellmana-Forda – przegląd
Ø Idea:
– Istnieje najlepsza droga od s do każdego innego wierzchołka nie zawierająca cykli dodatnich (cykle muszą zostać wyeliminowane).
– Maksymalna ilość krawędzi w takiej ścieżce wynosi |V|–1, ponieważ w ścieżce bez cykli może być co najwyżej |V| wierzchołków.
⇒ wystarczy sprawdzać ścieżki do |V|–1 wierzchołków.
16
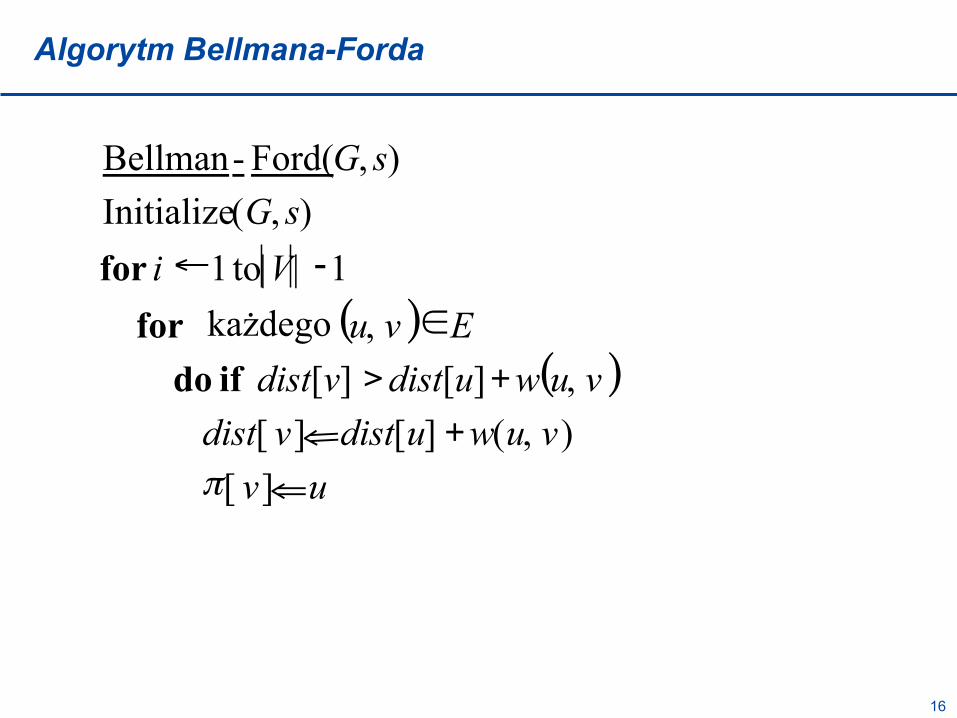
Algorytm Bellmana-Forda
( ) ( )
] [
) , ( ] [ ] [ , dist[u] dist[v] if do
, każdego for 1 to 1 for
) , ( Initialize ) , Ford( - Bellman
u v v u w u dist v dist
v u w E v u
|V| i s G
s G
⇓
+ ⇓
+ > ∈
- ←
π

17
Przykład: algorytm Bellmana-Forda (1)
5
9
6
7
8 -3
2
s
a b
c d
0
∞ ∞
∞ ∞
-2
7 -4
(a,b) (a,c) (a,d) (b,a) (c,b) (c,d) (d,s) (d,b) (s,a) (s,b)

18
Przykład: algorytm Bellmana-Forda (2)
5
9
6
7
8 -3
2
s
a b
c d
0
6 ∞
7 ∞
-2
7 -4
(a,b) (a,c) (a,d) (b,a) (c,b) (c,d) (d,s) (d,b) (s,a) (s,c)
∞
∞

19
Przykład: algorytm Bellmana-Forda (3)
5
9
6
7
8 -3
2
s
a b
c d
0
6 4
7 2
-2
7 -4
(a,b) (a,c) (a,d) (b,a) (c,b) (c,d) (d,s) (d,b) (s,a) (s,c)
11
∞
∞

20
Przykład: algorytm Bellmana-Forda (4)
5
9
6
7
8 -3
2
s
a b
c d
0
2 4
7 2
-2
7 -4
(a,b) (a,c) (a,d) (b,a) (c,b) (c,d) (d,s) (d,b) (s,a) (s,b)
6

21
Przykład: algorytm Bellmana-Forda (5)
5
9
6
7
8 -3
2
s
a b
c d
0
2 4
7 -2
-2
7 -4
(a,b) (a,c) (a,d) (b,a) (c,b) (c,d) (d,s) (d,b) (s,a) (s,b)
2

22
Własności algorytmu Bellmana-Forda
Ø Przy pierwszym przejściu krawędzi – rozpatrywani są tylko sąsiedzi s (ścieżki o długości 1). Znajdujemy wszystkie najlepsze ścieżki do tych węzłów.
Ø Przy drugim przejściu – znajdujemy najlepsze drogi o długości 2.
Ø Po |V|-1 przejściach, sprawdzone zostały wszystkie możliwości.
Ø Cel: staramy się poprawić ścieżkę z poprzedniego przebiegu jeśli jest to możliwe, bez tworzenia ujemnego cyklu.

23
Złożoność algorytmu Bellmana-Forda
Ø odwiedzenie |V|–1 wierzchołków à O(|V|)
Ø Przeprowadzanie relaksacji dla wszystkich krawędzi à O(|E|)
Ø Łącznie, O(|V|.|E|) dla czasu i O(|V|+|E|) dla pamięci.

24
Algorytm Bellmana-Forda dla DAG
Dla skierowanych grafów acyklicznych (Directed Acyclic Graphs - DAG), wystarczające jest O(|V|+|E|) relaksacji – jeśli wierzchołki są odwiedzane w porządku topologicznym (jeśli graf zawiera krawędź (u,v) to wierzchołek u występuje przed wierzchołkiem v):
DAG-Shortest-Path(G)
1. Posortuj topologicznie wierzchołki grafu G
2. Inicjuj G (dist[v] i π(v)) z wierzchołkiem s jako źródłem.
3. for każdego wierzchołka u do
4. for każdego wierzchołka v połączonego z u do
5. Relax(u,v)

25
Przykład: algorytm Bellmana-Forda dla DAG (1)
5 a s
0 ∞ 2 b
∞ 7 c
∞ -1 d
∞ -2 e
∞ 6 1
3 4
2
Wierzchołki są posortowane od lewej do prawej

26
Przykład: algorytm Bellmana-Forda dla DAG (2)
5 a s
0 ∞ 2 b
∞ 7 c
∞ -1 d
∞ -2 e
∞ 6 1
3 4
2

27
Przykład: algorytm Bellmana-Forda dla DAG (3)
5 a s
0 ∞ 2 b
2 7 c
6 -1 d
∞ -2 e
∞ 6 1
3 4
2

28
Przykład: algorytm Bellmana-Forda dla DAG(4)
5 a s
0 ∞ 2 b
2 7 c
6 -1 d
6 -2 e
4 6 1
3 4
2
29
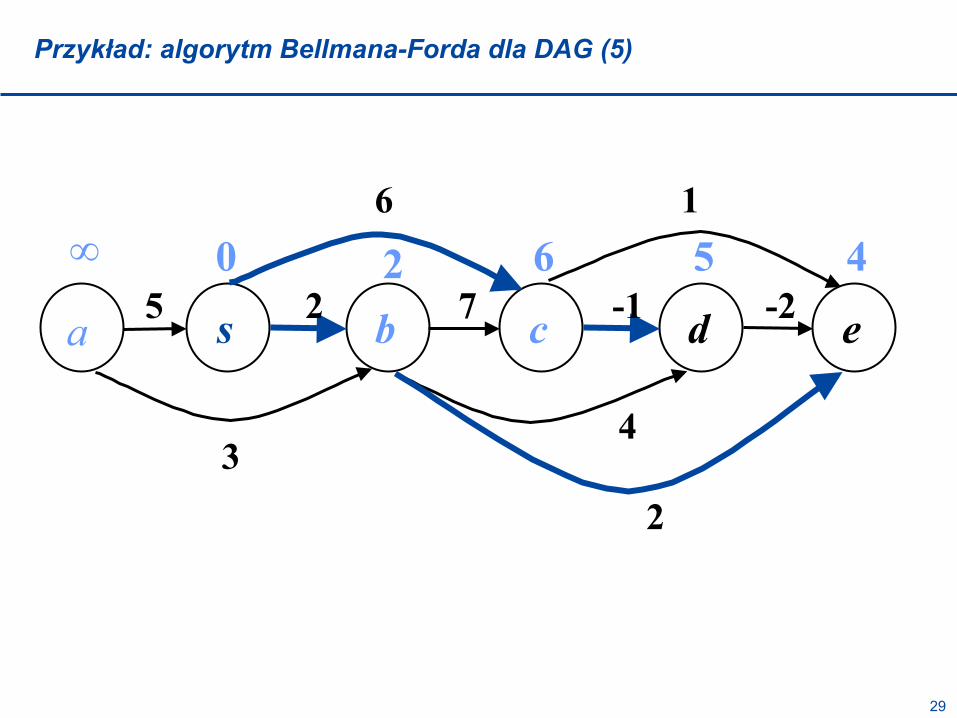
Przykład: algorytm Bellmana-Forda dla DAG (5)
5 a s
0 ∞ 2 b
2 7 c
6 -1 d
5 -2 e
4 6 1
3 4
2

30
Przykład: algorytm Bellmana-Forda dla DAG (6)
5 a s
0 ∞ 2 b
2 7 c
6 -1 d
5 -2 e
3 6 1
3 4
2

31
Przykład: algorytm Bellmana-Forda dla DAG (7)
5 a s
0 ∞ 2 b
2 7 c
6 -1 d
5 -2 e
3 6 1
3 4
2
32
Poprawność algorytmu Bellmana-Forda dla DAG
Własność relaksacji ścieżki
niech p = <v0, .. vk> będzie najkrótszą ścieżką pomiędzy v0 i vk. Jeżeli relaksacja ścieżek jest przeprowadzana w kolejności
(v0, v1), (v1, v2), … (vk-1, vk), to dist[vk]= δ(s,vk).
Dla DAG, mamy dobry porządek wierzchołków!
Stąd złożoność: O(|V|+|E|).

33
Algorytm Dijkstry - przegląd
Idea: robimy to samo co przy BFS dla grafów bez wag, z 2 różnicami:
– Korzystamy z funkcji kosztu jako odległości
– Korzystamy z kolejki priorytetowej zamiast zwykłej kolejki.
34
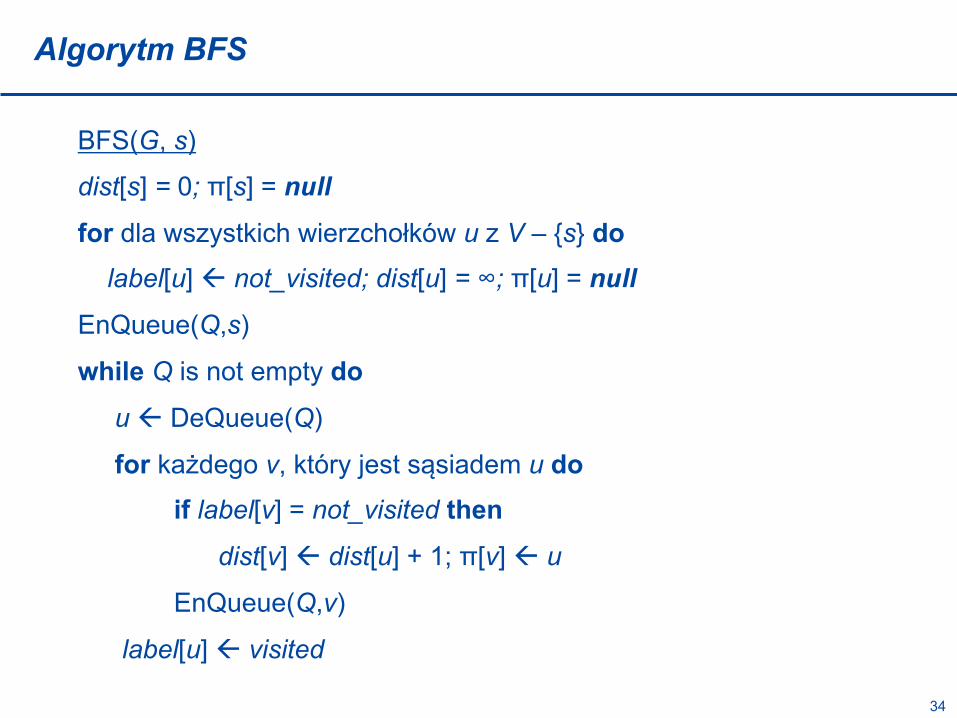
Algorytm BFS
BFS(G, s)
dist[s] = 0; π[s] = null
for dla wszystkich wierzchołków u z V – {s} do label[u] ß not_visited; dist[u] = ∞; π[u] = null
EnQueue(Q,s)
while Q is not empty do
u ß DeQueue(Q)
for każdego v, który jest sąsiadem u do
if label[v] = not_visited then
dist[v] ß dist[u] + 1; π[v] ß u
EnQueue(Q,v)
label[u] ß visited

35
Przykład: algorytm BFS
s
a b
c d

36
Przykład: algorytm Dijkstry
1
2
10
5
9
7
s
a b
c d
0
6 4 2 3

37
Algorytm Dijkstry
Dijkstra(G, s)
dist[s] = 0; π[u] = null for dla wszystkich wierzchołków u w V – {s} do label[u] ß not_visited; dist[u] = ∞; π[u] = null Q ß s while Q is not empty do
u ß Extract-Min(Q) for każdego v, sąsiada of u do
if label[v] = not_visited then
if d[v] > d[u] + w(u,v) then d[v] ß d[u] + w(u,v); π[v] = u
Insert-Queue(Q,v) label[u] = visited
38
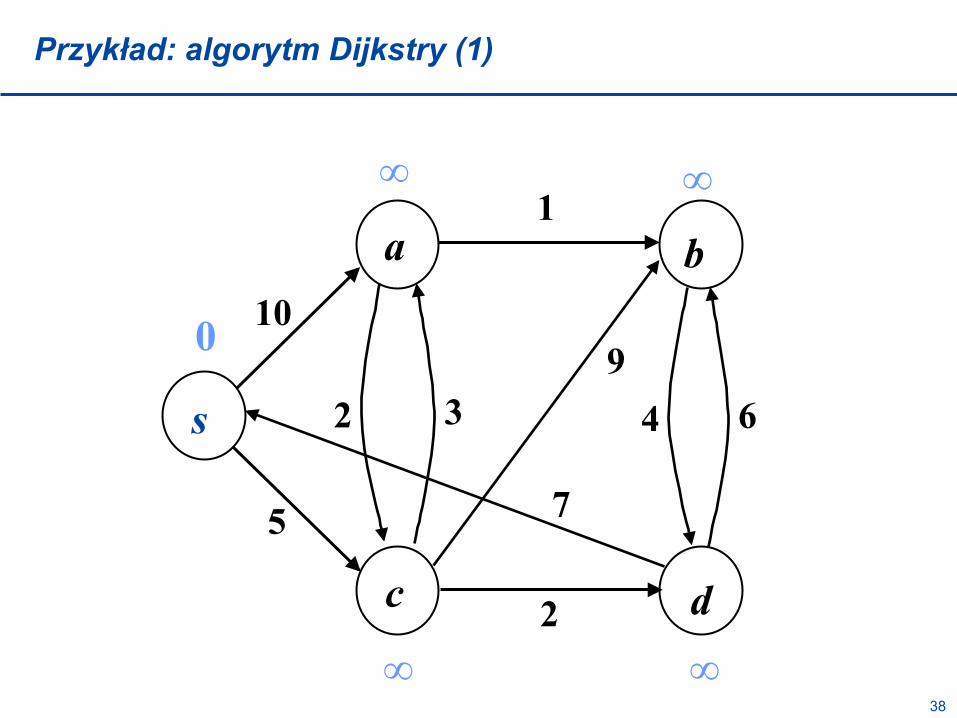
Przykład: algorytm Dijkstry (1)
1
2
10
5
9
7
s
a b
c d
0
∞ ∞
∞ ∞
6 4 2 3

39
Przykład: algorytm Dijkstry (2)
1
2
10
5
9
7
s
a b
c d
0
10 ∞
5 ∞
6 4 2 3

40
Przykład: algorytm Dijkstry (3)
1
2
10
5
9
7
s
a b
c d
0
8 14
5 7
6 4 2 3

41
Przykład: algorytm Dijkstry (4)
1
2
10
5
9
7
s
a b
c d
0
8 13
5 7
6 4 2 3

42
Przykład: algorytm Dijkstry (5)
1
2
10
5
9
7
s
a b
c d
0
8 9
5 7
6 4 2 3
43
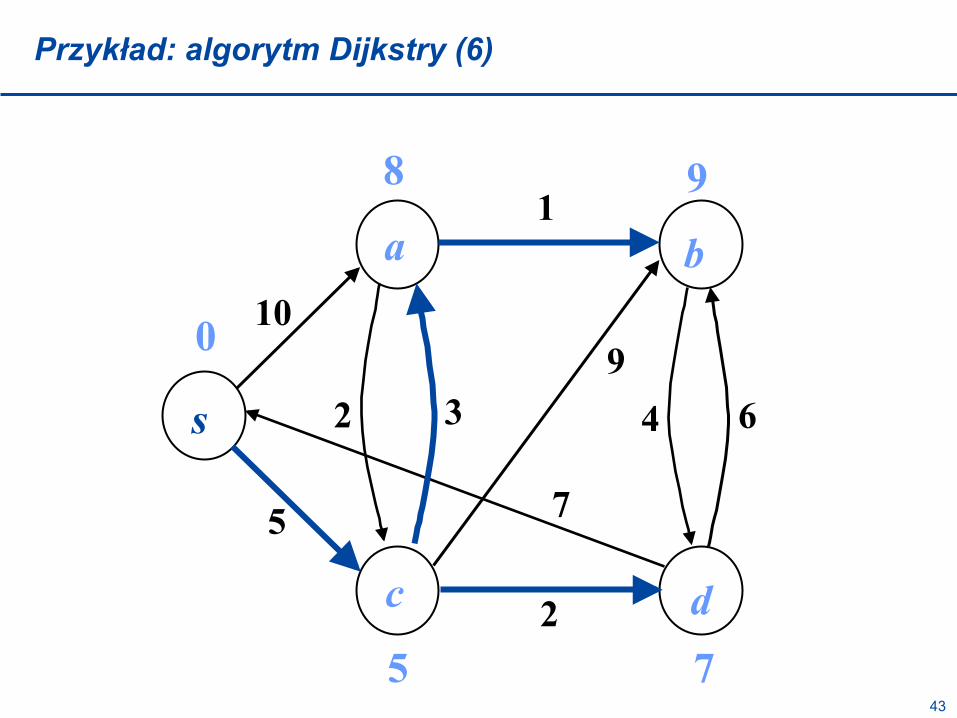
Przykład: algorytm Dijkstry (6)
1
2
10
5
9
7
s
a b
c d
0
8 9
5 7
6 4 2 3

44
Poprawność algorytmu Dijkstry
Twierdzenie: po zakończeniu algorytmu Dijkstry, dla każdego wierzchołka v∈V, mamy dist[v] = δ(s,v).
Definicja: ścieżkę z s do v będziemy nazywać specjalną jeśli jest to najkrótsza ścieżka, dla której wszystkie wierzchołki (być może poza v) należą do S – zbiór wierzchołków, dla których obliczono już najlepsze ścieżki z s.
Lemmat: na koniec każdej iteracji pętli while, zachodzą dwie własności:
1. Dla każdego w∈S, dist[w] jest długością najkrótszej ścieżki z s do w.
2. Dla każdego w∈V–S, dist(w) jest długością najkrótszej specjalnej
ścieżki z s do w.
Twierdzenie zachodzi, gdy S = V.
45
Złożoność algorytmu Dijkstry
Ø Algorytm przeprowadza |V| operacji Get-Min oraz |E| operacji EnQueue.
Ø Jeśli kolejka priorytetowa jest implementowana jako kopiec (heap), wstawianie zabiera O(lg|V|) a Get-Min – O(lg(|V|). Całkowity czas:
O(|V|lg|V |) + O(|E|lg|V|) = O(|E|lg|V|)
Ø Jeśli |E| = O(|V|2), nie dostajemy optymalności. W tym wypadku, przeprowadzamy wielokrotnie więcej operacji wstawiania, niż wyjmowania.
Ø Rozwiązanie: implementacja tablicowa! Wstawianie zajmujeO(1)
i Get-Min O(|V|) àO(|V|2) + O(|E|) = O(|V|2)
co jest lepsze niż dla niż dla kopca póki |E| jest O(|V|2/lg (|V|)).

46
Podsumowanie
Ø Rozwiązanie problemu najkrótszych ścieżek dla grafu odbywa się za pomocą relaksacji, opartej na nierówności trójkąta: dla każdej krawędzi e=(u,v)∈E:
δ(s,v) ≤ δ(s,u) + w(u,v)
Ø Mamy dwa algorytmy rozwiązujące ten problem:
– Bellmana-Forda: dla każdego wierzchołka, relaksacja po wierzchołkach.
Zajmuje to czas O(|E|.|V|). Działa dla grafów bez cykli ujemnych.
– Dijkstry: podobny do BFS, działa w czasie O(|E|lg|V|).