4
BAB II
LANDASAN TEORI
Bab ini berisi teori dasar yang melandasi RANCANGAN SISTEM
PENERANGAN DAN PENGAMANAN PINTU RUMAH MENGGUNAKAN
GSM BERBASIS ATMEGA 8535. Teori-teori pada bab ini mencakup hal-hal
yang mendukung dan menjadi dasar rujukan dalam Tugas Akhir. Dalam
perancangan ini banyak hal yang harus kita ketahui dasar pembuatan dari
perancangan ini, oleh sebab itu penulis akan menguraikan secara jelas sensor yang
digunakan, peralatan dan komponen sebagai berikut :
2.1 Mikrokontroller
Mikrokontroler adalah teknologi baru yaitu teknologi semikonduktor dan
kehadiranya sangat membantu perkembangan dunia elektronika. Dengan
arsitektur yang praktis tetapi memuat banyak kandungan transistor yang
terintegrasi, sehingga mendukung dibuatnya rangkaian elektronika yang lebih
portable . Mikrokontroler memiliki perbandingan ROM dan RAM-nya yang
besar, artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau
Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan
sebagai tempat penyimpan sementara, termasuk register-register yang digunakan
pada mikrokontroler yang bersangkutan.
Sedangkan disebutkan pada refrensi lain bahwa Mikrokontroler adalah suatu
alat elektronika digital yang mempunyai masukan dan keluaran serta kendali
dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja
Universitas Sumatera Utara

5
mikrokontroler sebenarnya membaca dan menulis data. Sekedar contoh,
bayangkan diri Anda saat mulai belajar membaca dan menulis, ketika Anda sudah
bisa melakukan hal itu Anda bisa membaca tulisan apapun baik buku, cerpen,
artikel dan sebagainya, dan Andapun bisa pula menulis hal-hal sebaliknya.
Begitu pula jika Anda sudah mahir membaca dan menulis data maka Anda
dapat membuat program untuk membuat suatu sistem pengaturan otomatik
menggunakan mikrokontroler sesuai keinginan Anda. Mikrokontroler merupakan
komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik,
yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut
"pengendali kecil" dimana sebuah sistem elektronik yang sebelumnya banyak
memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat
direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler.
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai
masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus
dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis
data. Sekedar contoh, bayangkan diri Anda saat mulai belajar membaca dan
menulis, ketika Anda sudah bisa melakukan hal itu Anda bisa membaca tulisan
apapun baik buku, cerpen, artikel dan sebagainya, dan Andapun bisa pula menulis
hal-hal sebaliknya. Begitu pula jika Anda sudah mahir membaca dan menulis data
maka Anda dapat membuat program untuk membuat suatu sistem pengaturan
otomatik menggunakan mikrokontroler sesuai keinginan Anda. Mikrokontroler
merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan
elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya
Universitas Sumatera Utara

6
bisa disebut "pengendali kecil" dimana sebuah sistem elektronik yang sebelumnya
banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS
dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh
mikrokontroler ini.
Dengan penggunaan mikrokontroler ini maka :
1. Sistem elektronik akan menjadi lebih ringkas.
2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar
dari sistem adalah perangkat lunak yang mudah dimodifikasi.
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak.
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi
komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi
kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran
(I/O). Dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah
komputer karena mikrokontroler sudah mengandung beberapa periferal yang
langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator,
konversi digital ke analog (DAC), konversi analog ke digital dan sebagainya
hanya menggunakan sistem minimum yang tidak rumit atau kompleks.
Secara teknis hanya ada 2 yaitu RISC dan CISC dan masing-masing
mempunyai keturunan/keluarga sendiri-sendiri. RISC kependekan dari Reduced
Instruction Set Computer : instruksi terbatas tapi memiliki fasilitas yang lebih
banyak. CISC kependekan dari Complex Instruction Set Computer : instruksi bisa
dikatakan lebih lengkap tapi dengan fasilitas secukupnya.
Universitas Sumatera Utara
7
Tentang jenisnya banyak sekali ada keluarga Motorola dengan seri 68xx,
keluarga MCS51 yang diproduksi Atmel, Philip, Dallas, keluarga PIC dari
Microchip, Renesas, Zilog. Masing-masing keluarga juga masih terbagi lagi
dalam beberapa tipe. Jadi sulit sekali untuk menghitung jumlah mikrokontroler.
2.1.1 Mikrokontroller Atmega 8535
AVR ATMEGA 8535 adalah mikrokontroler yang memiliki arsitektur RISC
8 bit, dimana semua instruksi dikemas dalam kode 16 bit word dan sebagian
instruksi dieksekusi dalam satu siklus clock.
AVR berteknologi RISC (Reduced Instruction Set Computing) sedangkan
seri MCS51 berteknologi CISC (Complex Instruction Set Computing) AVR dapat
dkelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga AT90xx,
keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-
masing kelas adalah memori, pheriperal dan fungsinya.
Untuk Mikrokontroler AVR yang berukuran kecil, dapat mencoba
AT90S2313 dengan ukuran flash memori 2k dengan dua input analog.
2.1.2 Arsitektur Atmega 8535
Didalam Mikrokontroler Atmega 8535 sudah terdiri dari :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC (Analog to Digital Converter) 10 bit sebanyak 8 channel.
3. Tiga buah timer/counter dengan kemampuan perbandingan
4. CPU yang terdiri dari 32 buah register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 512 byte.
Universitas Sumatera Utara

8
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port Antarmuka PPI.
10. Antarmuka komparator analog.
11. Port USART untuk komunikasi serial.
2.1.3 Konfigurasi Pin Atmega 8535
Berikut ini ialah susunan pin/kaki dari Atmega 8535:
1. VCC merupakan pin masukan positif catu daya, untuk catu daya yang
dibutuhkan yaitu sebesar 5 volt.
2. GND sebagai pin Ground.
3. Port A (PA0 – PA7) merupakan I/O dua arah yang dapat deprogram sebagai
pin masukan ADC.
4. Port B (PB0 – PB7) merupakan I/O dua arah dan pin fungsi khusus yaitu
timer/counter, komparator analog, dan SPI.
5. Port C (PC0 – PC7) merupakan I/O dua arah dan pin fungsi khusus yaitu
TWI, Komparator analog dan Timer Osilator.
6. Port D (PD0 – PD7) merupakan I/O dua arah dan pin fungsi khusus yaitu
Komparator analog, interupsi eksternal dan komunikasi serial.
7. Reset merupakan pin yang digunakan untuk me-reset Mikrokontroler.
8. XTAL 1 dan XTAL 2 sebagai pin masukan clock eksternal. Suatu
Mikrokontroler membutuhkan sumber detak (clock) agar dapat
mengeksekuis instruksi yang ada di memori.
9. AVCC sebagia pin masukan tegangan untuk ADC.
Universitas Sumatera Utara
9
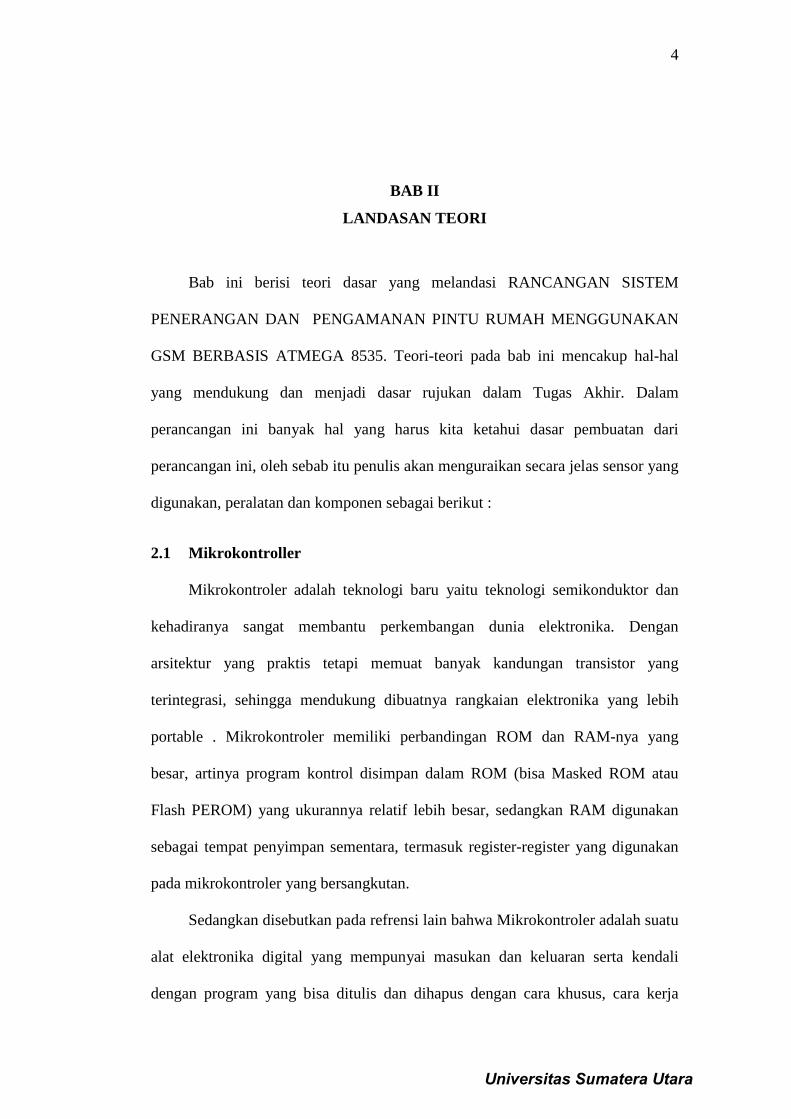
10. AREF sebagai pin masukan tegangan
Gambar 2.1 Konfigurasi pin IC Mikrokontroller ATMega8535
2.2 Transistor
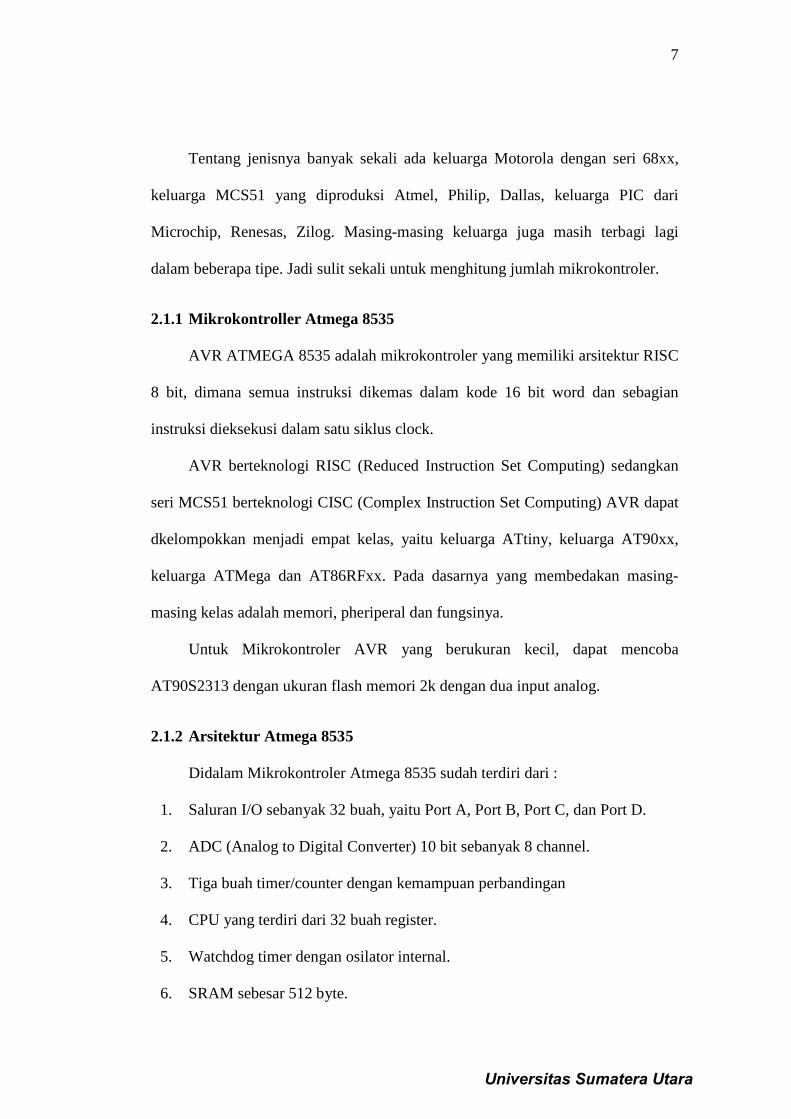
Transistor merupakan alat dengan tiga terminal seperti yang diperlihatkan
oleh simbol sirkit. Setelah bahan semikonduktor dasar diolah, terbentuklah bahan
semikonduktor jenis P dan N. Walaupun proses pembuatannya banyak, pada
dasarnya transistor merupakan tiga lapis gabungan kedua jenis bahan tadi, yaitu
NPN atau PNP.
Gambar 2.2. Simbol untuk transistor PNP dan NPN
Universitas Sumatera Utara
10
Simbol sirkit kedua jenis transistor itu hampir sama. Perbedaannya terletak
pada arah tanda panah di ujung emitter, seperti yang telah diketahui, arah tanda
panah ini menunjukkan arah aliran arus konversional yang berlawanan arah dalam
kedua jenis tadi tetapi selalu dari jenis P ke jenis N dalam sirkit emitter dasar.
2.2.1 Transistor NPN
Kolektor dan emitter merupakan bahan N dan lapisan diantara mereka
merupakan jenis P. Pada mulanya diperkirakan bahwa transistor seharusnya
bekerja dalam salah satu arah, ialah dengan saling menghubungkan ujung-ujung
kolektor dan emitter karena mereka terbuat dari jenis bahan yang sama. Namun,
hal ini tidaklah mungkin karena mereka tidak berukuran sama. Kolektor
berukuran lebih besar dan kebanyakan dihubungan secara langsung ke kotaknya
untuk penyerapan panas. Ketika transistor digunakan hampir semua panas yang
terbentuk berada pada sambungan basis kolektor yang harus mampu
menghilangkan panas ini. Sambungan basis emitter hanya mampu menahan
tegangan yang rendah.
Operasi dalam arah balik dapat dijalankan tetapi tidak efisien, sehingga
tidak sesuai dengan metode hubungan praktis karena sangat sering merusakkan
alat. Pada umumnya transistor dianggap sebagai suatu alat yang beroperasi karena
adanya arus. Kalau arus mengalir ke dalam basis dan melewati sambungan basis
emitter suatu suplai positif pada kolektor akan menyebabkan arus mengalir
diantara kolektor dan emitter. Dua hal yang harus diperhatikan pada arus kolektor
adalah :
Universitas Sumatera Utara
11
1. Untuk arus basis nol, arus kolektor turun sampai tingkat arus kebocoran
yaitu kurang dari 1 mF dalam kondisi normal (untuk transistor silikon).
2. Untuk arus basis tertentu, arus kolektor yang mengalir akan jauh lebih besar
daripada arus basis itu. Arus yang dicapai ini disebut hFE, dengan
dimana, iC = perubahan arus kolektor
iB = perubahan arus basis
hFE = arus yang dicapai
2.2.2 Transistor PNP
Transistor PNP beroperasi dengan cara yang sama dengan piranti NPN.
Disini tegangan VEB menyebabkan emitter tipe P potensialnya lebih tinggi dari
basis tipe –N, sehingga persambungan basis emitter menjadi bias maju.
Persambungan kolektor basis dibias balik oleh tegangan VBC yang menjaga basis
tipe-N berpotensial lebih tinggi dibandingkan kolektor tipe-P. Tidak seperti
transistor NPN, arus dalam piranti PNP terutama disebabkan oleh lubang yang
diinjeksikan dari emitter ke dalam basis sebagai tegangan bias maju VEB. Karena
komponen arus emitter yang disebabkan elektron yang diinjeksikan dari basis ke
emitter dijaga agar kecil dengan menggunakan basis doping ringan, sebagian
besar arus emitter disebabkan oleh lubang. Elektron yang diinjeksi dari basis ke
emitter menghasilkan komponen dominan arus basis iB1. Demikian juga lubang
yang diinjeksi ke dalam basis akan berkombinasi dengan pembawa mayoritas
Universitas Sumatera Utara

12
dalam basis (elektron) dan hilang. Hilangnya elektron basis harus diganti dari
rangkaian luar yang menimbulkan komponen kedua arus basis iB2. lubang-lubang
yang berhasil mencapai batas daerah pengosongan persambungan basis kolektor
akan tarik oleh tegangan negatif pada kolektor. Jadi lubang-lubang ini akan disapu
melintasi daerah pengosongan ke dalam kolektor dan timbul sebagai arus
kolektor.
2.2.3 Transistor Sebagai Saklar
Jika arus basis IB nol, arus kolektor IC akan menjadi arus kebocoran yang
rendah dan tegangan yang melalui resistor muatan RL akan sia-sia. Oleh karena
itu:
VCE ≈ VCC tegangan suplai
Kalau jumlah nominal IB kecil, IC akan sama dengan hFE IB dan tegangan
yang melalui RL, akan menjadi:
VR = ICRL
dan VCE = VCC - ICRL
Naiknya IB akan menyebabkan IC naik terus hingga mencapai
titik ICRL ≈ VCC, yaitu ketika IC tidak dapat naik lagi, meski IB tetap naik.
Pada titik ini transistor dikatakan mendapat aliran secara keras, sampai ke
dasar atau sarat, dan tegangan VCE disebut VCE sarat tegangan output yang sarat.
Biasanya tegangan ini sebesar 0,2 Volt untuk transistor silicon serta dapat sekecil
beberapa puluh milivolt, tetapi tidak lebih dari 0,3 Volt.
Universitas Sumatera Utara

13
Gambar 2.3 Transistor sebagai saklar
2.3 Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang
berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar
push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas
penekanan tertentu yang telah ditentukan dan akan memutuskan saat saat katup
tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor
yang akan emberikan perubahan elektrik saat terjadi perubahan mekanik pada
sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu
benda ( objek ) yang bergerak.
Limit switch umumnya digunakan untuk :
1. Memutuskan dan menyambungkan rangkaian menggunakan objek atau
benda lain.
2. Menghidupkan daya yang besar, dengan sarana yang kecil.
3. Sebagai sensor posisi atau kondisi suatu objek.
Universitas Sumatera Utara

14
Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya
yang ada pada batas / daerah yang telah ditentukan sebelumnya sehingga terjadi
pemutusan atau penghubungan rangkaian dari rangkaian tersebut. Limit switch
memiliki 2 kontak yaitu NO ( normally Open ) dan kontak NC ( normally Close )
dimana salah satu kontak akan aktif jika tombolnya tertekan.
2.4 Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper
bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu,
untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang
membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki
beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa.
Keunggulannya antara lain adalah :
1. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih
mudah diatur.
2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
4. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik
(perputaran)
5. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor
seperti pada motor DC
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel
langsung ke porosnya
Universitas Sumatera Utara
15
7. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range
yang luas.
Pada dasaranya terdapat 3 tipe motor stepper yaitu:
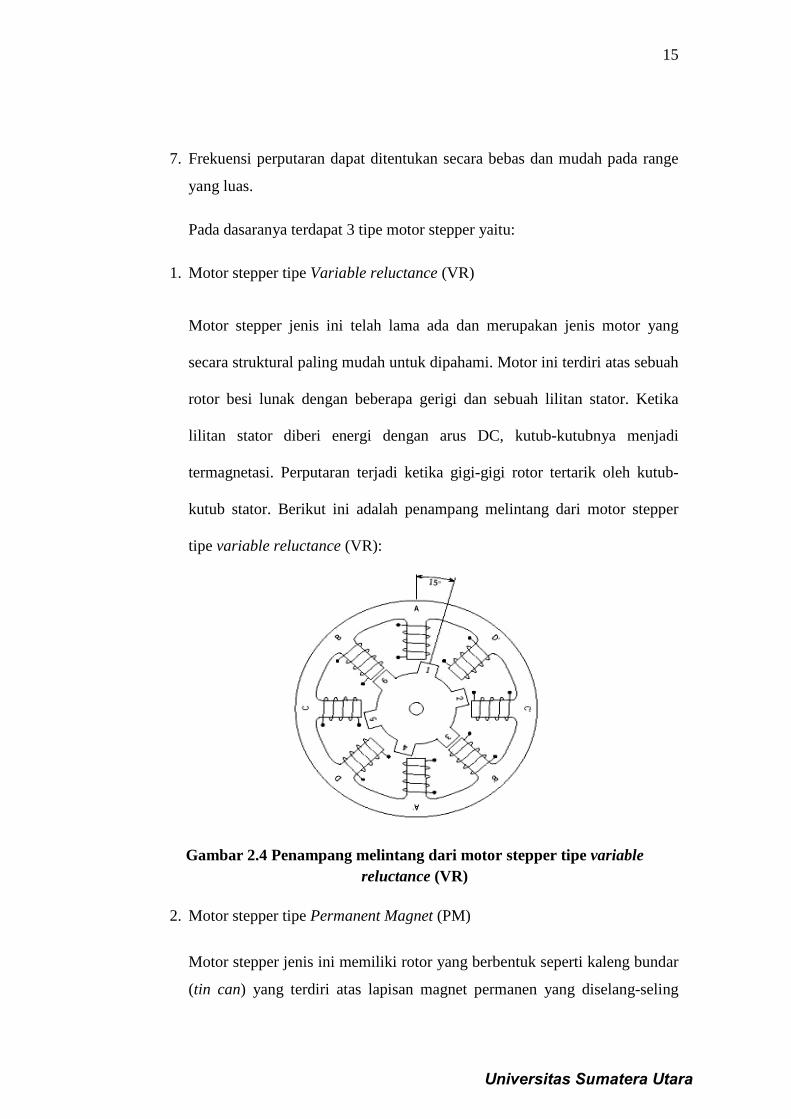
1. Motor stepper tipe Variable reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang
secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah
rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika
lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi
termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-
kutub stator. Berikut ini adalah penampang melintang dari motor stepper
tipe variable reluctance (VR):
Gambar 2.4 Penampang melintang dari motor stepper tipe variable reluctance (VR)
2. Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar
(tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling
Universitas Sumatera Utara

16
dengan kutub yang berlawanan. Dengan adanya magnet permanen, maka
intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat
menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki
resolusi langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah
atau 48 hingga 24 langkah setiap putarannya. Berikut ini adalah ilustrasi
sederhana dari motor stepper tipepermanent magnet:
Gambar 2.5 Ilustrasi sederhana dari motor stepper tipe permanent magnet (PM)
3. Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari
kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki
gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen
yang tersusun secara aksial pada batang porosnya seperti motor tipe PM.
Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena
kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah
yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau 100-400 langkah
setiap putarannya. Berikut ini adalah penampang melintang dari motor
stepper tipe hibrid:
Universitas Sumatera Utara

17
Gambar 2.6 Penampang melintang dari motor stepper tipe hybrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper
dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor
stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch /
transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup
dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol
(ground) pada salah satu terminal lilitan (wound) motor sementara terminal
lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center
tap) dari lilitan.
Gambar 2.7 Motor stepper dengan lilitan unipolar
Universitas Sumatera Utara

18
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang
berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal
lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke
negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang agak
lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor
stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar
dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2.8 Motor stepper dengan lilitan bipolar
2.5 Modem GSM
GSM adalah singkatan dari Global System for Mobile Communication.
GSM adalah standar telepon 2G yang mendominasi digital mobile untuk sebagian
besar dunia. Menentukan cara di mana ponsel berkomunikasi dengan jaringan
berbasis menara.
Universitas Sumatera Utara
19
GSM adalah salah satu dari dua teknologi ponsel besar di AS lainnya adalah
CDMA. AT & T dan T-Mobile menggunakan GSM. Sprint dan Verizon
menggunakan CDMA. GSM juga umum digunakan oleh Operator seluler di
Eropa.
Meskipun GSM dan CDMA menyediakan fitur dan layanan dasar yang
sama, (seperti panggilan suara, pesan teks, dan layanan data) mereka beroperasi
sangat berbeda di berbagai tingkatan teknis. Hal ini membuat ponsel GSM
sepenuhnya kompatibel dengan jaringan CDMA, dan sebaliknya.
Fitur yang paling terlihat dari GSM adalah kartu SIM. Kartu SIM yang
removable, berukuran smart card yang mengidentifikasi pengguna pada jaringan,
dan juga dapat menyimpan informasi seperti entri buku telepon. Kartu SIM
memungkinkan pengguna untuk beralih ponsel hanya dengan memindahkan kartu
SIM mereka dari satu ponsel ke yang lain.
Di Indonesia teknologi GSM masih lebih banyak digunakan, ada beberapa
Operator seluler yang menggunakan GSM sebagai teknologi seluler mereka,
diantaranya Telkomsel, XL dan Indosat. Sementara Operator seluler Smartfren
berjalan pada teknologi CDMA.
Modem yang digunakan adalah modem tipe SIM 800L. SIM800 adalah
salah satu modul GSM yang paling umum digunakan. Meskipun referensi
perintah AT banyak tersedia , itu sangat tidak mudah bagi pemula untuk benar
memahami dan menggunakan SIM800l . Oleh karena itu , ini merangkum
bagaimana bisa berinteraksi dengan SIM800l.
Universitas Sumatera Utara
20
Satu perintah yaitu AT Command (Attention Command) digunakan untuk
berkomunikasi atau berhubungan antara komputer dengan terminal modem.
Diawali prefiks AT dan diakhiri dengan (=0x0D). AT Command untuk sms
biasanya diikuti dengan masukan data I/O yang diwakili oleh unit-unit data PDU
(Protocol Data Unit).
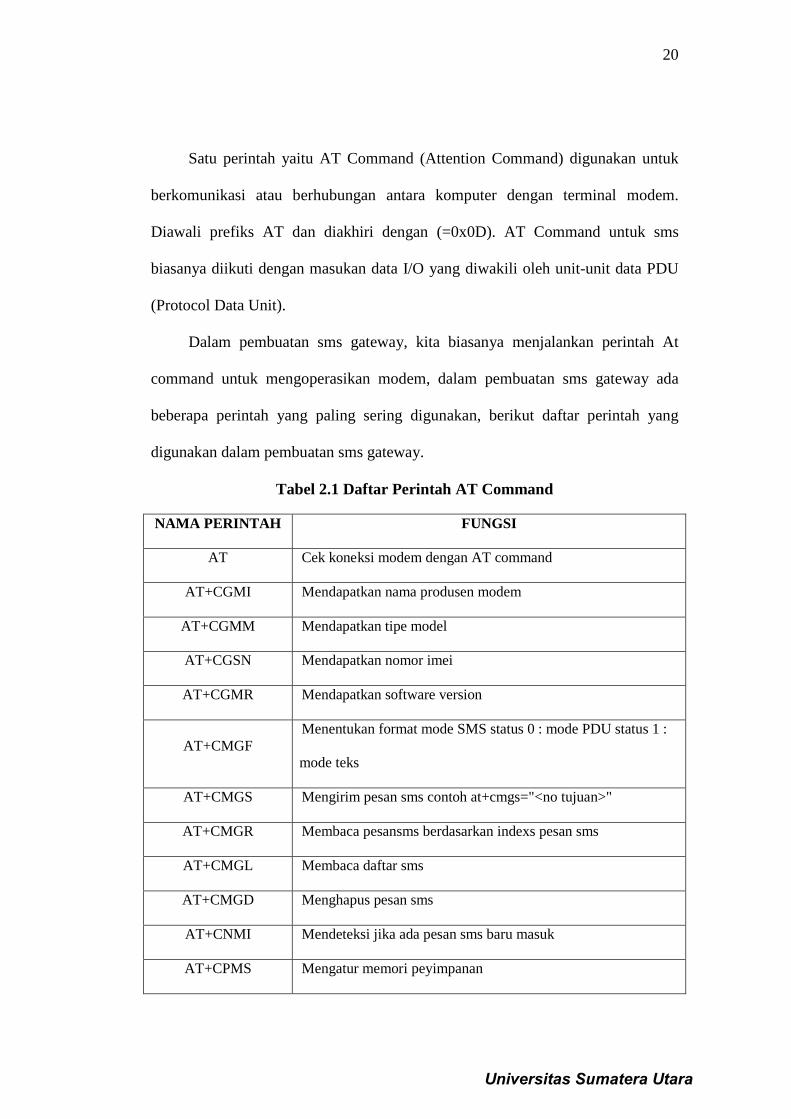
Dalam pembuatan sms gateway, kita biasanya menjalankan perintah At
command untuk mengoperasikan modem, dalam pembuatan sms gateway ada
beberapa perintah yang paling sering digunakan, berikut daftar perintah yang
digunakan dalam pembuatan sms gateway.
Tabel 2.1 Daftar Perintah AT Command
NAMA PERINTAH FUNGSI
AT Cek koneksi modem dengan AT command
AT+CGMI Mendapatkan nama produsen modem
AT+CGMM Mendapatkan tipe model
AT+CGSN Mendapatkan nomor imei
AT+CGMR Mendapatkan software version
AT+CMGF Menentukan format mode SMS status 0 : mode PDU status 1 :
mode teks
AT+CMGS Mengirim pesan sms contoh at+cmgs="<no tujuan>"
AT+CMGR Membaca pesansms berdasarkan indexs pesan sms
AT+CMGL Membaca daftar sms
AT+CMGD Menghapus pesan sms
AT+CNMI Mendeteksi jika ada pesan sms baru masuk
AT+CPMS Mengatur memori peyimpanan
Universitas Sumatera Utara

21
Gambar 2.9 Modem GSM SIM 800l
Mikrokontroller yang kita gunakan adalah jenis AVR, gunakan fungsi
printf untuk mengirim At Command ke modem GSM. Adapun contoh perintah At
Command ke dalam mikrokontoller adalah sebagai berikut:
printf("AT+CMGS=0811653010");
delay_ms(1000);
printf("%c",0x0D)
Merupakan perintah mengirim kode AT Command yaitu AT + CMGS =
0811653010 ke modem GSM untuk proses mengirim sms.
Universitas Sumatera Utara
Recommended

















