Centro Federal de Educação Tecnológica do Espírito Santo
Unidade de Ensino Descentralizada da Serra/ES ____________________________________________________________
ELETRÔNICA DE POTÊNCIA
_____________________________________________AUTOMAÇÃO INDUSTRIAL
Centro Federal de Educação Tecnológica do Espírito Santo
Unidade de Ensino Descentralizada da Serra/ES _____________________________________________________________
ELETRÔNICA DE POTÊNCIA
MARCIO BRUMATTI
SERRA - ES
2005
_____________________________________________AUTOMAÇÃO INDUSTRIAL

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
ii
SUMÁRIO
1. INTRODUÇÃO ................................................................................................................4
2. SEMICONDUTORES DE POTÊNCIA .............................................................................6
2.1 – Introdução ........................................................................................................................... 6
2.2 – Perdas nos Semicondutores de Potência ........................................................................ 6
2.3 – O Diodo................................................................................................................................ 7
2.4 - Tiristores ............................................................................................................................ 10
2.4.1 – SCR (Retificador controlado de silício) ..................................................................... 10
2.4.2 – O TRIAC.................................................................................................................... 13
2.4.3 – O DIAC...................................................................................................................... 14
2.5 – O Transistor Bipolar de Junção (BJT) ............................................................................ 14
2.6 – Mosfet de Potência ........................................................................................................... 16
2.7 – O IGBT ............................................................................................................................... 18
2.8 – Módulos de Potência........................................................................................................ 19
2.9 – A Escolha do Semicondutor de Potência....................................................................... 20
3. RETIFICADORES NÃO CONTROLADOS....................................................................22
3.1 - Introdução .......................................................................................................................... 22
3.2 - Retificador Monofásico de Meia Onda ............................................................................ 22
3.3 - Retificador Monofásico de Onda Completa em Ponte................................................... 26
3.4 - Retificadores Trifásicos.................................................................................................... 29
3.4.1 - Retificador Trifásico de Meia Onda............................................................................ 29
3.4.2 - Retificador Trifásico de Onda Completa .................................................................... 30
4. RETIFICADORES CONTROLADOS.............................................................................33
4.1 - Retificador Monofásico Controlado de Meia Onda ........................................................ 33
4.2 - Retificador Monofásico Controlado de Onda Completa em Ponte............................... 36
4.3 - Retificador Monofásico Semicontrolado......................................................................... 38
4.4 - Retificador Trifásico Controlado de Meia Onda ............................................................. 40
4.5 - Retificador Trifásico Controlado de Onda Completa..................................................... 42
4.6 - Retificador Trifásico Semicontrolado.............................................................................. 46
4.7 - Sincronismo de Retificadores Trifásicos........................................................................ 49
4.8 - Acionamento de Motores CC Com Retificadores........................................................... 50
4.9 – Acionamento de Motor CC Com Conversor Dual.......................................................... 51
5. CIRCUITOS DE DISPARO............................................................................................55

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
iii
5.1 – Introdução ......................................................................................................................... 55
5.2 - Circuito de Disparo Com Sinais CA................................................................................. 55
5.3 - Circuito de Disparo Com Pulsos Usando o UJT ............................................................ 56
5.4 – Isolação de Circuitos de Disparo .................................................................................... 60
5.5 - Circuito Integrado - TCA785 ............................................................................................. 61
6. CONTROLADORES CA................................................................................................64
6.1 – Controle Liga-Desliga....................................................................................................... 64
6.2 - Controle de fase ................................................................................................................ 65
6.2.1- Controlador Monofásico.............................................................................................. 65
6.2.2 - Controlador Trifásico.................................................................................................. 66
6.3 – Soft-Start ........................................................................................................................... 66
7. CONVERSORES CC – CC............................................................................................68
7.1 - Introdução .......................................................................................................................... 68
7.2 – Modulação por Largura de Pulso (PWM)........................................................................ 68
7.3 - Conversor Abaixador (BUCK) .......................................................................................... 69
7.4 - Conversor Elevador (Boost)............................................................................................. 73
7.5 - Fontes Chaveadas............................................................................................................. 74
7.6 – Controle em Fontes Chaveadas ...................................................................................... 76
8. CONVERSORES CC – CA (INVERSORES).................................................................78
8.1 - Introdução .......................................................................................................................... 78
8.2 - Inversores Monofásicos de Onda Quadrada .................................................................. 78
8.3 - Inversor Trifásico de Onda Quadrada ............................................................................. 80
8.4 - Inversores PWM................................................................................................................. 82
REFERÊNCIAS BIBLIOGRÁFICAS .................................................................................85

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Introdução 4
1. INTRODUÇÃO
A eletrônica de potência tem a função de controlar o fluxo de potência, processando energia das
fontes de alimentação disponíveis (rede elétrica, geradores ou baterias) através de dispositivos
semicondutores de potência, para alimentar as cargas.
Por exemplo, em um microcomputador é necessário alimentar os chips lógicos com 5 Vcc, através
da rede 127 Vac, logo se necessita de um circuito de eletrônica de potência.
A Importância da eletrônica de potência pode ser notada através de uma lista onde aparecem
algumas de suas aplicações:
Residencial e comercial: iluminação – reatores eletrônicos; computadores pessoais;
equipamentos eletrônicos de entretenimento; elevadores; sistemas ininterruptos de energia (“no-
break”); equipamentos de escritório.
Industrial: acionamento de bombas, compressores, ventiladores, máquinas ferramenta e outros
motores; iluminação; aquecimento indutivo; soldagem.
Transporte: veículos elétricos; carga de baterias; locomotivas; metrô.
Sistemas Elétricos: transmissão em altas tensões CC; fontes de energia alternativa (vento, solar,
etc.); armazenamento de energia.
Aeroespaciais: sistema de alimentação de satélites; sistema de alimentação de naves;
Telecomunicações: carregadores de baterias; fontes de alimentação CC; sistemas ininterruptos
de energia (UPS).
Os sistemas de eletrônica de potência consistem em muito mais que um conversor de energia.
Como pode ser visto no diagrama de blocos da Fig. 1.1, necessita-se também de filtros para
minimizar os ruídos e harmônicos de tensão e corrente gerados pelo circuito de potência, o qual
opera em regime chaveado; circuitos de comando para impor ao semicondutor do conversor sua
entrada em condução ou corte; e a realimentação e controle que mantém o sistema operando no
ponto desejado mesmo com mudanças na entrada (fonte) ou na saída (carga).
O circuito de potência é composto por semicondutores de potência e elementos passivos
(indutores, capacitores e resistores), podendo assumir várias configurações em função das
características de tensão, corrente e freqüência da fonte de alimentação e da carga. Pelo fato de
não haver partes móveis, esses circuitos de potência são chamados de conversores estáticos, os
quais podem ser classificados como: Conversores CA – CC (Retificadores), Conversores CC –
CA (Inversores), Conversores CC – CC (Choppers) e Conversores CA – CA (Cicloconversores e
Controladores CA). O diagrama da Fig. 1.2 relaciona cada conversor com a respectiva conversão.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Introdução 5
Fig. 1.1 - Diagrama de blocos de um sistema em eletrônica de potência.
RETIFICADORCICLOCONVERSOR
CHOPPERINVERSOR
CO
NV
ER
SO
R D
EFR
EQ
UÊ
NC
IA d
e 2
ES
TAG
IOS
CO
NV
ER
SO
R C
Cde
2 E
STA
GIO
S
Fig. 1.2 - Conversores em eletrônica de potência.
Os conversores estáticos utilizados para acionamento com velocidade variável de motores de
indução são chamados comercialmente de conversores de freqüência ou simplesmente
inversores. Em sua maioria são conversores CA – CA em dois estágios, ou seja, retificadores
associados a inversores.
FILTRO
DE
ENTRADA
FILTRO DE
SAÍDA
CIRCUITO DE POTÊNCIA
(CONVERSOR ESTÁTICO)
CARGA
CIRCUITO DE
COMANDO DOS
SEMICONDUTORES
CIRCUITO DE
CONTROLE
GRANDEZAS ELÉTRICAS
GRANDEZAS MECÂNICAS
ENTRADA
DE
ENERGIA
REALIMENTAÇÃO

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 6
2. SEMICONDUTORES DE POTÊNCIA
2.1 – Introdução
Para entender o funcionamento e as diversas topologias dos conversores estáticos é necessário o
conhecimento dos dispositivos semicondutores que compõem estes conversores, ou seja, suas
características de tensão, corrente, comando e velocidade de comutação.
Em eletrônica de potência, os semicondutores podem ser considerados como chaves, podendo
estar no estado fechado ou conduzindo (ON) e aberto ou bloqueado (OFF).
Podem ser divididos em três grupos de acordo com o grau de controlabilidade. Esses grupos são:
Chaves não controladas: estado ON e OFF dependendo do circuito de potência. Ex.:
diodos.
Chaves semicontroladas: estado ON controlado por um sinal externo e OFF dependendo
do circuito de potência. Ex.: SCR, TRIAC.
Chaves Controladas – os estados ON e OFF são controlados por sinal externo. Ex.:
Transistor (BJT), MOSFET, IGBT, GTO.
2.2 – Perdas nos Semicondutores de Potência
Operando como chave, o semicondutor apresenta dois tipos de perdas de energia, as quais
geram dissipação de calor sobre o mesmo: as perdas em condução e as perdas em comutação.
A Fig. 2.1 a seguir apresenta as formas de onda de tensão, corrente e potência dissipada sobre
um semicondutor que opera como chave.
Quando o semicondutor está em condução, flui através do mesmo uma corrente Ion e aparece
sobre ele uma baixa queda de tensão Von, as quais são responsáveis pelas perdas em condução.
Quanto maiores forem Ion e Von, maior será a perda de condução, assim, são desejáveis
semicondutores que apresentam baixos valores de tensão quando em condução.
A comutação pode ser de dois tipos: OFF para ON (entrada em condução) ou de ON para OFF
(bloqueio). No primeiro caso, quando o semicondutor entra em condução sua tensão cai até
próximo de zero (Von) e a corrente cresce. Enquanto estes valores não se estabilizam aparecem
as perdas por comutação. Tais perdas ocorrem também durante o bloqueio, onde a corrente cai
até zero enquanto a tensão no semicondutor cresce atingindo o valor Voff. Quanto maiores forem
a tensão Voff, a corrente Ion, a duração da comutação (toff/on e ton/off) e a freqüência de comutação,
maior será a perda de comutação. Assim, é desejável que o semicondutor apresente comutações
rápidas para diminuir as perdas de comutação.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 7
Ion
comutaçãooff/on
Voff
Ioff = 0
comutaçãoon/off
bloqueiocondução
Von
toff/on ton/offton toff
T = período de comutação
Per
das
Fig. 2.1 - Comutação nos semicondutores de potência.
2.3 – O Diodo
A Fig. 2.2 mostra o símbolo do diodo e suas características de operação através da curva v x i.
Fig. 2.2 - Diodo: símbolo e característica de operação.
Quando a tensão entre o anodo e o catodo for positiva e maior que VF (em torno de 0,7 V), é dito
que o diodo está diretamente polarizado e está no estado de condução, ou seja, começa a
conduzir corrente com uma pequena tensão sobre ele. Quando o diodo é reversamente
polarizado, ou seja a tensão entre anodo e catodo é negativa, ele esta no estado corte,
bloqueando a passagem de corrente no sentido reverso.
A entrada em condução de um diodo é considerada ideal, ou seja, rápida o suficiente para não
afetar o resto do circuito de potência em que está inserido. Entretanto, para o bloqueio leva-se um
tempo adicional, chamado tRR – tempo de recuperação reversa. Na comutação do estado de
condução para o bloqueio, ocorre a descarga da capacitância intrínseca da junção. Nesse
VF
iF
vD
K A
vD - +
iD
A - anodo K - catodo
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 8
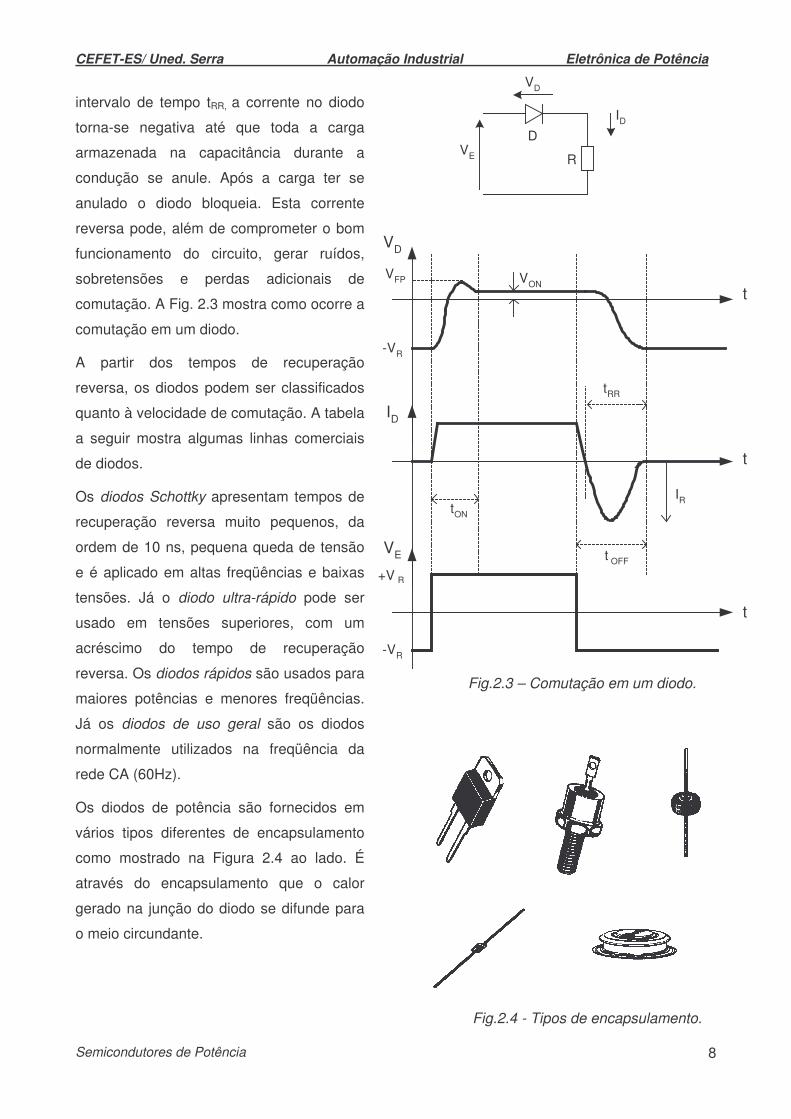
intervalo de tempo tRR, a corrente no diodo
torna-se negativa até que toda a carga
armazenada na capacitância durante a
condução se anule. Após a carga ter se
anulado o diodo bloqueia. Esta corrente
reversa pode, além de comprometer o bom
funcionamento do circuito, gerar ruídos,
sobretensões e perdas adicionais de
comutação. A Fig. 2.3 mostra como ocorre a
comutação em um diodo.
A partir dos tempos de recuperação
reversa, os diodos podem ser classificados
quanto à velocidade de comutação. A tabela
a seguir mostra algumas linhas comerciais
de diodos.
Os diodos Schottky apresentam tempos de
recuperação reversa muito pequenos, da
ordem de 10 ns, pequena queda de tensão
e é aplicado em altas freqüências e baixas
tensões. Já o diodo ultra-rápido pode ser
usado em tensões superiores, com um
acréscimo do tempo de recuperação
reversa. Os diodos rápidos são usados para
maiores potências e menores freqüências.
Já os diodos de uso geral são os diodos
normalmente utilizados na freqüência da
rede CA (60Hz).
Os diodos de potência são fornecidos em
vários tipos diferentes de encapsulamento
como mostrado na Figura 2.4 ao lado. É
através do encapsulamento que o calor
gerado na junção do diodo se difunde para
o meio circundante.
Fig.2.4 - Tipos de encapsulamento.
VD
ID
VE
t
t
t
+V R
-VR
-VR
VONVFP
tON
t OFF
tRR
IR
D
RVE
ID
VD
Fig.2.3 – Comutação em um diodo.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 9
SCHOTTKY ULTRA-RÁPIDO
1 A 10 A 35 A 1 A 15 A 50 A
Vr COD. Vr COD. Vr COD. Vr COD. Vr COD. Vr COD.
20 1N5817 35 MBR1035 20 MBR3520 50 MUR105 50 MUR1505 50 MUR5005
40 1N5819 45 MBR1045 35 MBR3535 200 MUR120 200 MUR1520 100 MUR5010
60 MBR160 60 MBR1060 45 MBR3545 400 MUR140 400 MUR1540 200 MUR5020
80 MBR180 80 MBR1080 600 MUR160 600 MUR1560
100 MBR1100 100 MBR10100 1000 MUR1100
IFSM 25 A IFSM 150 A IFSM 600 A IFSM 35 A IFSM 200 A IFSM 600 A
VF 0,6 V VF 0,57 V VF 0,55 V trr 50 ns trr 35 ns trr 50 ns
RÁPIDO USO GERAL
1 A 35 A 300 A 1 A 15 A 50 A
Vr COD. Vr COD. Vr COD. Vr COD. Vr COD. Vr COD.
50 1N4933 50 1N3899 600 R23F6A 50 1N4001 50 MUR1505 50 MUR2100
200 1N4935 200 1N3901 1000 R32F10A 200 1N4003 200 MUR1520 200 MUR2102
400 1N4936 400 1N3903 1400 R23F14A 400 1N4004 400 MUR1540 400 MUR2104
600 1N4937 600 1N1386 600 1N4005 600 MUR1560 600 MUR2106
IFSM 30 A IFSM 250 A IFSM 5000 A IFSM 30 A IFSM 400 A IFSM 400 A
trr 0,2 µs trr 0,2 µs trr 0,2 µs
Na tabela constam alguns parâmetros importantes para a especificação de um diodo, sendo:
VR - tensão reversa;
IFAVG - corrente média direta;
VF – queda de tensão direta;
IFSM - corrente se surto não repetitiva máxima;
trr - tempo de recuperação reversa.
Além destes, existem outros parâmetros como:
IFRMS - corrente direta eficaz;
IFRM - corrente direta repetitiva máxima;
IRRM - valor de pico da corrente de recuperação reversa.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 10
2.4 - Tiristores
Dá-se o nome de tiristores a uma família de dispositivos semicondutores que funcionam como
chaves, onde se destacam: o SCR (Retificador Controlado de Silício), TRIAC (tiristor triodo
bidirecional), DIAC (tiristor diodo bidirecional), GTO (tiristor comutável pela porta), MCT (Tiristor
controlado por MOS), e LASCR (SCR ativado por luz), também chamado de LTT (Light Triggered
Thyristor). O tiristor mais utilizado é o SCR, que comumente acaba sendo chamado simplesmente
de tiristor.
2.4.1 – SCR (Retificador controlado de silício)
A Fig. 2.5 mostra o símbolo do SCR e suas características de operação através da curva v x i.
Fig. 2.5 – Tiristor: símbolo e característica de operação do SCR.
Quando o SCR está diretamente polarizado (vT > 0) e é aplicado um pulso positivo de corrente de
seu gate (G) para o catodo (K), este dispositivo entra em condução permitindo circulação da
corrente IT entre anodo e catodo. Uma vez em condução, o pulso de gate pode ser removido e o
SCR continua em condução como um diodo, ou seja, não pode ser comandado a bloquear. Para
que o tal deixe de conduzir é necessário que a corrente IT caia abaixo do valor mínimo de
manutenção (IH), desta forma o SCR entra novamente na região de corte. Quando o SCR está
reversamente polarizado (vT < 0) ele não conduz.
Maneiras de disparar um SCR
A seguir são apresentadas as formas de disparo de um SCR.
Disparo por pulso de gatilho
Esta forma é a mais utilizada. Como já foi dito, quando o SCR está diretamente polarizado e
recebe um pulso positivo de corrente de gate para catodo, ele entra em condução. O componente
A - anodo K - catodo
KA
vT - +
iT G
G - gate
VF vT
on off
iT

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 11
se manterá em condução desde que, após o processo de entrada em condução, a corrente de
anodo tenha atingido um valor superior ao limite IL (corrente de “latching”). Sendo assim, a
duração do sinal de disparo deve ser tal que permita à corrente atingir o valor IL antes que o sinal
de disparo seja retirado.
Disparo por sobretensão
Se a tensão entre anodo e catodo (diretamente polarizado) aumenta demasiadamente, atingindo
valor superior a tensão de breakover (VBO), é possível iniciar o processo de condução mesmo sem
corrente no gate. Embora nem sempre destrutivo, este procedimento raramente é utilizado na
prática.
Disparo por taxa de crescimento da tensão direta
Uma vez que o SCR esteja diretamente polarizado, mesmo
sem corrente de gate, pode haver a entrada em condução
devido à taxa de crescimento da tensão entre anodo e
catodo. Se esta taxa for suficientemente elevada (a tensão
crescer rapidamente), o SCR entra em condução.
Este disparo, normalmente não desejado, é evitado pela
ação de um circuito de proteção conhecido como snubber,
que se trata de um circuito RC em paralelo com o tiristor.
Disparo por temperatura
Em altas temperaturas, a corrente de fuga numa junção p-n reversamente polarizada pode
assumir valor suficiente para que leve o tiristor ao estado de condução. Para evitar este disparo,
utilizam-se dissipadores de calor evitando o aumento excessivo de temperatura.
Métodos de comutação de um SCR
Como já sabemos, o SCR não pode ser levado ao bloqueio através de um sinal de comando. A
condição para o bloqueio é que a corrente de anodo fique abaixo do valor IH - corrente de
manutenção, cujo valor é estabelecido pelo fabricante.
Existem duas formas básicas de bloqueio de um SCR.
Comutação natural
Em circuitos de corrente alternada, a corrente naturalmente passa por zero em algum instante
fazendo com que o SCR corte. Este tipo de comutação é chamado comutação pela rede. Em
T
RC
Fig. 2.6 – Tiristor com um circuito snubber.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 12
circuitos CC, onde a comutação depende da característica da própria carga, a comutação é
definida como comutação pela carga.
Comutação forçada
É utilizada em circuitos CC onde não é possível a reversão da corrente de anodo. Sendo assim,
deve-se oferecer um caminho alternativo para a corrente, enquanto se aplica uma tensão reversa
sobre o SCR. Normalmente é utilizado um capacitor carregado antecipadamente com uma tensão
reversa, em relação aos terminais do SCR. No instante desejado para o corte, coloca-se o
capacitor em paralelo com o SCR aplicando sobre ele uma tensão reversa. Um exemplo deste tipo
de comutação será visto durante o estudo dos inversores, no Capítulo 8.
A tabela abaixo mostra as características principais de alguns SCR’s encontrados
comercialmente.
TIRISTORES – SCR
4 A
25 A
110A
1230 A
V Cod. V Cod. V Cod. V Cod.
50 2N6237 50 2N682 50 2N1910 200 ST330C02L
200 2N6238 200 2N685 200 2N1913 600 ST330C06L
400 2N6239 400 2N688 400 2N1916 1200 ST330C12L
600 2N6240 600 2N690 600 2N1806 1600 ST330C162L
800 2N6241 800 2N692 700 2N1807
ITSM 15 A ITSM 150 ITSM 100 A ITSM 7925 A
VGT 3 V VGT 2 V VGT 2,5 VGT 3 V
IGT 10 mA IGT 40 mA IGT 110 mA IGT 200 mA Entre os parâmetros importantes a serem especificados em um SCR, têm-se:
ITAV – Corrente direta média;
ITRMS – Corrente direta eficaz;
ITSM – Surto máximo de corrente;
VDRM e VRRM – Máximos valores de tensão direta e reversa;
VGT e IGT – tensão e corrente de gate;
IL e IH – corrente de “latching” e de manutenção.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 13
2.4.2 – O TRIAC
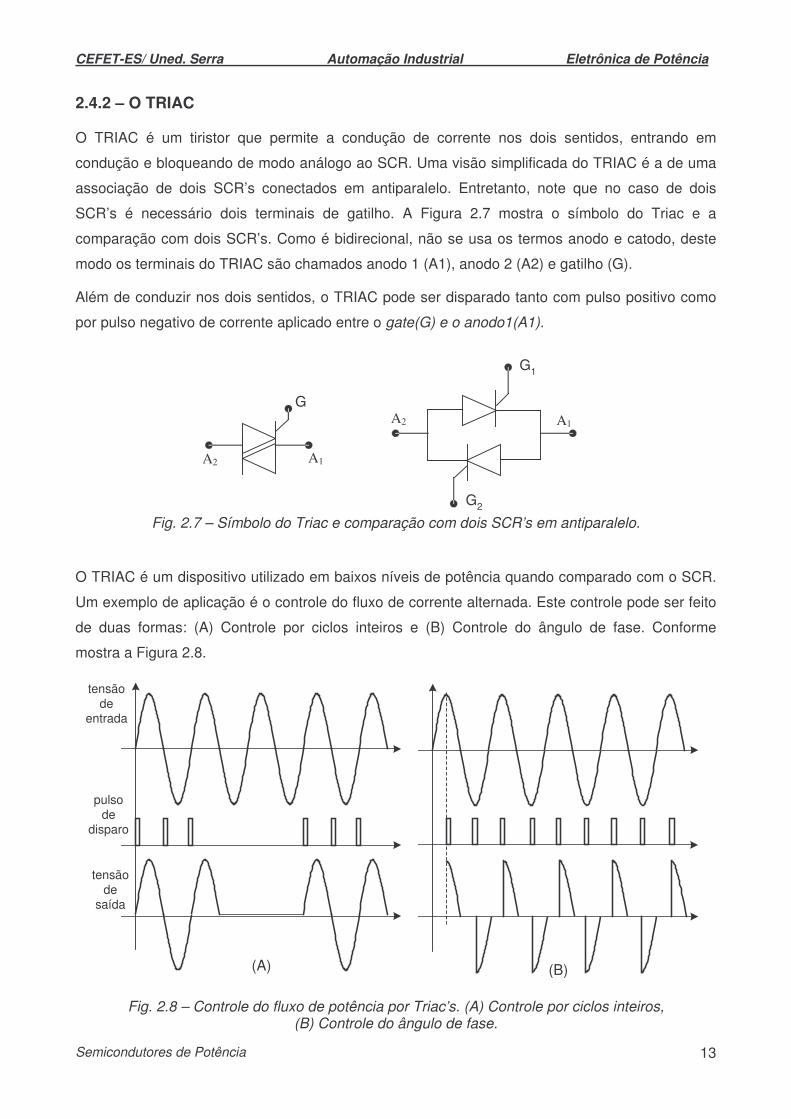
O TRIAC é um tiristor que permite a condução de corrente nos dois sentidos, entrando em
condução e bloqueando de modo análogo ao SCR. Uma visão simplificada do TRIAC é a de uma
associação de dois SCR’s conectados em antiparalelo. Entretanto, note que no caso de dois
SCR’s é necessário dois terminais de gatilho. A Figura 2.7 mostra o símbolo do Triac e a
comparação com dois SCR’s. Como é bidirecional, não se usa os termos anodo e catodo, deste
modo os terminais do TRIAC são chamados anodo 1 (A1), anodo 2 (A2) e gatilho (G).
Além de conduzir nos dois sentidos, o TRIAC pode ser disparado tanto com pulso positivo como
por pulso negativo de corrente aplicado entre o gate(G) e o anodo1(A1).
Fig. 2.7 – Símbolo do Triac e comparação com dois SCR’s em antiparalelo.
O TRIAC é um dispositivo utilizado em baixos níveis de potência quando comparado com o SCR.
Um exemplo de aplicação é o controle do fluxo de corrente alternada. Este controle pode ser feito
de duas formas: (A) Controle por ciclos inteiros e (B) Controle do ângulo de fase. Conforme
mostra a Figura 2.8.
Fig. 2.8 – Controle do fluxo de potência por Triac’s. (A) Controle por ciclos inteiros,
(B) Controle do ângulo de fase.
A1A2
G
G1
A1A2
G2
tensãode
entrada
pulsode
disparo
tensãode
saída
(A) (B)

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 14
2.4.3 – O DIAC
Assim como o Triac, o Diac é um dispositivo que permite condução nos dois sentidos tendo
aplicações em baixos níveis de potência. Entretanto, a entrada em condução não ocorre devido a
um pulso de corrente no gate, mas a partir de uma tensão de disparo aplicada entre seus
terminais. A Figura 2.9 mostra a característica tensão x corrente e o símbolo comumente utilizado
para a representação do DIAC.
Quando o DIAC está submetido
a uma tensão inferior a VD
(tensão de disparo), o mesmo
não conduz. Depois de atingido o
valor da tensão de disparo, o
DIAC entra em condução,
mantendo uma pequena tensão
entre seus terminais. Para o seu
bloqueio é necessário que a
corrente assuma valor inferior a
IH (corrente de manutenção).
2.5 – O Transistor Bipolar de Junção (BJT)
O Transistor bipolar mostrado na Figura 2.10, entra e permanece em condução (região de
saturação), quando é aplicada uma corrente adequada em sua base, tornando-se equivalentre a
uma chave fechada. Nesta condição, a tensão entre coletor e emissor (VCE = VCESat) é tipicamente
menor que 2 Volts, logo, são baixas as perdas em condução do BJT. Entretanto, sua comutação
não é rápida, o que aumenta muito as perdas de comutação quando opera em altas freqüências
(acima de 40 kHz).
Fig. 2.10 – Transistor bipolar de Junção: símbolo e característica de operação
C
B
E
iC
iB VCE
VBE C – coletor B – base E - emissor
Região de saturação
iB3
iB2
iB4
VCE
iC
iB1
iB0
Fig. 2.9 – Símbolo e características do DIAC.
Vi
i
V+ VD
1° Quadrante
+ IH
3° Quadrante
- IH
- VD

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 15
Para saturar o transistor bipolar é necessário uma corrente de base IB > ICsat/β, sendo β o ganho
de corrente que está em torno de 10 para transistores de baixa tensão e 5 para transistores de
alta tensão. Para o bloqueio do dispositivo, é necessário reduzir a corrente de base até zero.
Dá-se o nome de transistor “par darlington” quando se associam dois transistores em um único
encapsulamento de forma a aumentar o seu ganho, entretanto isso aumenta a queda de tensão e
perdas de condução e comutação.
A partir do exposto acima, pode-se concluir que além das perdas de comutação já mencionadas, a
complexidade dos circuitos de comando e sua potência requerida são grandes fatores limitantes
destes dispositivos.
A tabela a seguir é uma reduzida amostra de transistores bipolares de potência comerciais da
Motorola Semiconductors, mostrando algumas de suas principais características. Ressalta-se que
existem outras opções de tensão, corrente e tipo de encapsulamento.
TRANSISTOR BIPOLAR
IC (A) VCE (V) COD. ts (µs) tf (µs) hFEmin
5 500 MJ16002A 3 3 5
400 MJ13015 2 0,5 8
400 MJ10007 “darlington" 1,5 0,5 30 10
800 MJ16008 4,5 0,2 4
50 100 BUS51 3,3 1,6 15
Entre os parâmetros para especificação de um BJT, têm-se:
IC – corrente de coletor;
VCE – máxima tensão entre coletor e emissor;
VCE sat – tensão entre coletor e emissor quando em saturação;
hFE – ganho de corrente;
tON = td + tR; tOFF = tS + tF – tempos relacionados às comutações.
Sendo: td – “delay time”; tR – “rise time”; tS – “storage time”; tF – “fall time”.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 16
2.6 – Mosfet de Potência
O Mosfet (Transistor de Efeito de Campo), cujo símbolo e curva característica são mostrados na
Figura 2.11, é comandado por tensão aplicada entre os terminais Gate (G) e Fonte (S).
Este dispositivo se aproxima de uma chave fechada (região ôhmica) quando a tensão VGS é
adequada, tipicamente de 9 a 15V. E está bloqueado quando esta tensão for inferior ao limite VGSth
(4V, típico). Quando em condução, o dispositivo necessita de permanente aplicação da tensão
VGS (tensão entre gate e fonte), entretanto não flui corrente no gate, exceto durante as transições
ON – OFF e OFF – ON, quando a capacitância de gate é carregada e descarregada.
Fig. 2.11 – Mosfet: símbolo e característica de operação.
Operando na região ôhmica, o Mosfet se comporta como uma resistência de valor relativamente
baixo entre dreno e fonte (RDS ON), sendo assim, é a região de interesse para operação como
chave.
Os tempos de comutação são curtos (da ordem de dezenas de ns), e sua a resistência de
condução RDS ON cresce com o aumento da tensão do dispositivo, logo este dispositivo possui
poucas perdas em aplicações de altas freqüências e baixas tensões (até 300V e acima de 50k
Hz).
Como o dispositivo é comandado por tensão, seu circuito de gate é simples e consome pouca
energia, como mostra o esquema e as formas de onda da Figura 2.12 a seguir.
MD
S
GV
VGS
IG
ID
Fig. 2.12 – Comando de gate do Mosfet e principais formas de onda.
vGS1
VDS
vGS2
vGS3
vGS4
vGS5
Região ôhmica
vGS0
iD
D
G
S
iD
VDS
VGS
D - Dreno
G - Gate
S - Fonte
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 17
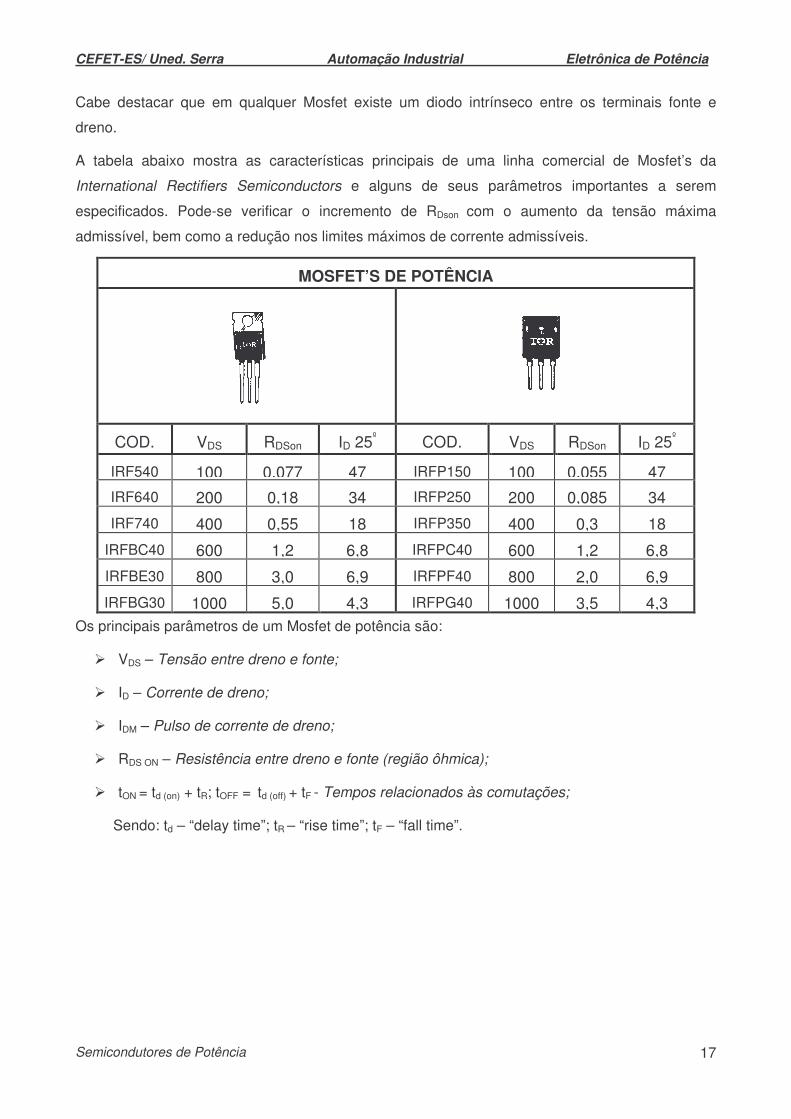
Cabe destacar que em qualquer Mosfet existe um diodo intrínseco entre os terminais fonte e
dreno.
A tabela abaixo mostra as características principais de uma linha comercial de Mosfet’s da
International Rectifiers Semiconductors e alguns de seus parâmetros importantes a serem
especificados. Pode-se verificar o incremento de RDson com o aumento da tensão máxima
admissível, bem como a redução nos limites máximos de corrente admissíveis.
MOSFET’S DE POTÊNCIA
COD. VDS RDSon ID 25º COD. VDS RDSon ID 25º
IRF540 100 0,077 47 IRFP150 100 0,055 47 IRF640 200 0,18 34 IRFP250 200 0,085 34
IRF740 400 0,55 18 IRFP350 400 0,3 18
IRFBC40 600 1,2 6,8 IRFPC40 600 1,2 6,8
IRFBE30 800 3,0 6,9 IRFPF40 800 2,0 6,9
IRFBG30 1000 5,0 4,3 IRFPG40 1000 3,5 4,3 Os principais parâmetros de um Mosfet de potência são:
VDS – Tensão entre dreno e fonte;
ID – Corrente de dreno;
IDM – Pulso de corrente de dreno;
RDS ON – Resistência entre dreno e fonte (região ôhmica);
tON = td (on) + tR; tOFF = td (off) + tF - Tempos relacionados às comutações;
Sendo: td – “delay time”; tR – “rise time”; tF – “fall time”.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 18
2.7 – O IGBT
O IGBT (Isolated Gate Bipolar Transistor) associa a característica de comando dos MOSFET com
a característica de condução dos BJT. Nos últimos anos, vem tendo considerável evolução, com o
crescimento de sua velocidade de comutação.
A Figura 2.13 mostra o símbolo e a curva característica do IGBT, onde se nota que o componente
apresenta os terminais coletor e emissor (como no BJT) e gate (como no Mosfet).
O IGBT apresenta a vantagem de ser comandado por tensão requerendo baixa quantidade de
energia do circuito de comando, e em condução tem a vantagem do BJT de baixas tensões VCE on,
podendo conduzir elevadas correntes com baixas perdas.
O tempo de entrada em condução é maior que o do MOSFET, na ordem de décimos de µs, e no
bloqueio surge o fenômeno da corrente de cauda que provoca elevadas perdas de comutação em
altas freqüências. A Figura 2.14 mostra o esquema simplificado do comando com suas principais
formas de onda. Tipicamente, VGE entre 12V e 20V resulta em VCE ON reduzida, diminuindo as
perdas de condução.
Fig. 2.14 – Comando de gate do IGBT e principais formas de onda
C
GE
15 V
VGE
IG
IC
correntede cauda
C
G
E
C- Coletor
G- GateE- Emissor
C
VCE ON
VGE5
V GE4
V GE3
VGE2
VGE1
VGE0 V CE
V CE
I C
VGE
I
Fig. 2.13 – Símbolo e curva característica do IGBT

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 19
A tabela abaixo mostra as características principais de uma linha comercial de IGBT’s da
International Rectifiers Semiconductors e seus parâmetros importantes a serem especificados e
aplicações típicas.
IGBT 600 V
*
PADRÃO
Aplicações: UPS e
acionamento
RÁPIDO
Aplicações: Industrial, UPS
de altas tensões e
acionamento
ULTRA-RÁPIDO
Aplicações: Robótica e
acionamento
Ic COD. Perdas Ic (25º) COD. Perdas Ic (25º) COD. Perdas
19 IRGBC20S 4,1 16 IRGBC20F 1,8 13 IRGBC20U 0,35
50 IRGBC40S 13 49 IRGBC40F 4,4 40 IRGBC40U 1,5
70 IRGBC50S 16 70 IRGBC50F 6,0 55 IRGBC50U 1,7
Os principais parâmetros a serem especificados em um IGBT são:
VCES – tensão máxima suportável entre coletor e emissor;
IC - corrente de coletor;
ICM – pulso de corrente de coletor;
VCE ON – tensão entre coletor e emissor na região de saturação;
tON = td (on) + tR; tOFF = td (off) + tF - Tempos relacionados às comutações;
Sendo: td – “delay time”; tR – “rise time”; tF – “fall time”.
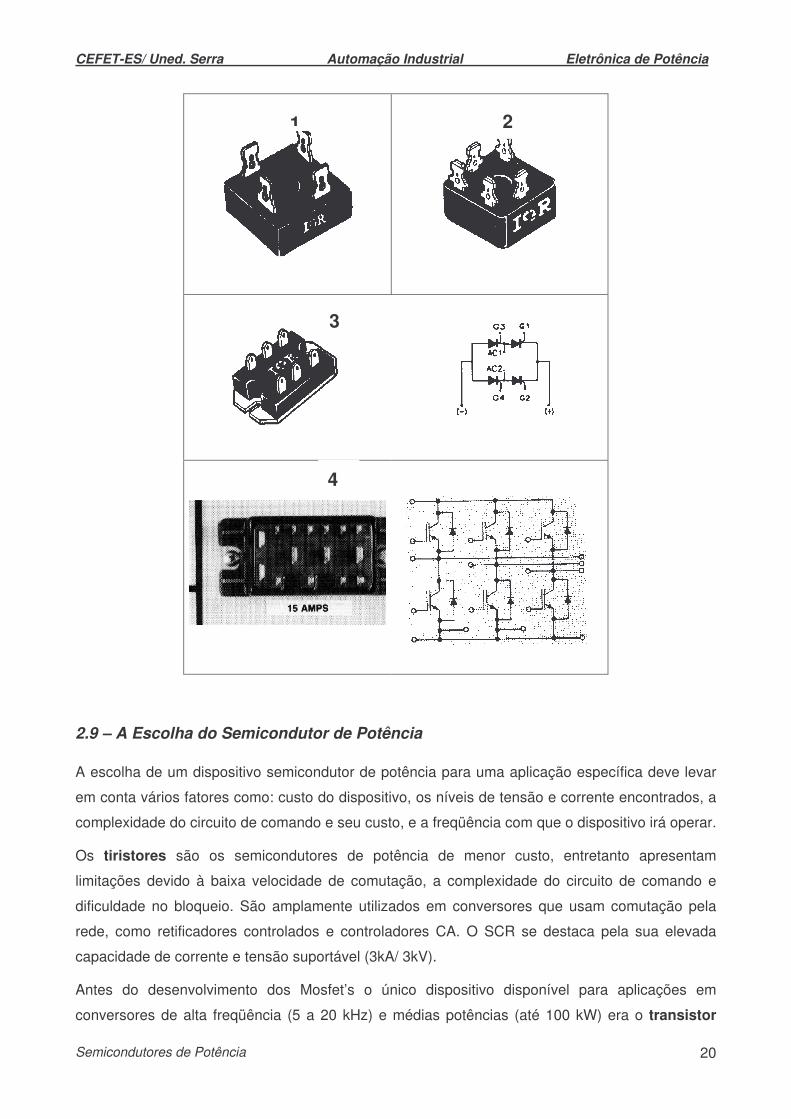
2.8 – Módulos de Potência
Os semicondutores de potência podem aparecer já associados em módulos, reduzindo o
tamanho dos conversores e facilitando a montagem, entretanto podem encarecer a manutenção.
Como por exemplo, mostramos abaixo: 1. Ponte monofásica de diodos, 2. ponte trifásica de
diodos, 3. ponte monofásica de tiristores, 4. ponte completa trifásica de IGBT’s ou MOSFET’s
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 20
2.9 – A Escolha do Semicondutor de Potência
A escolha de um dispositivo semicondutor de potência para uma aplicação específica deve levar
em conta vários fatores como: custo do dispositivo, os níveis de tensão e corrente encontrados, a
complexidade do circuito de comando e seu custo, e a freqüência com que o dispositivo irá operar.
Os tiristores são os semicondutores de potência de menor custo, entretanto apresentam
limitações devido à baixa velocidade de comutação, a complexidade do circuito de comando e
dificuldade no bloqueio. São amplamente utilizados em conversores que usam comutação pela
rede, como retificadores controlados e controladores CA. O SCR se destaca pela sua elevada
capacidade de corrente e tensão suportável (3kA/ 3kV).
Antes do desenvolvimento dos Mosfet’s o único dispositivo disponível para aplicações em
conversores de alta freqüência (5 a 20 kHz) e médias potências (até 100 kW) era o transistor
1 2
3
4

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Semicondutores de Potência 21
bipolar de potência – BJT. A tecnologia deste dispositivo evoluiu bastante, permitindo a
fabricação de componentes com capacidade de suportar corrente de coletor de centenas de
ampères e tensões de bloqueio de até 800 V. A principal vantagem do BJT de potência é o custo,
particularmente em altas tensões, enquanto suas principais desvantagens são a complexidade e
custo do circuito de comando e limitação na velocidade de comutação, tornando-se uma
tecnologia ultrapassada. É aplicado em deflexão horizontal de TVs e monitores, amplificador de
áudio, etc.
O Mosfet funciona muito bem em altas freqüências e necessita de um simples circuito de
comando. Assim, reina absoluto em aplicações de alta freqüência (acima dos 50kHz) e baixas
tensões e correntes. Como já vimos, a resistência de condução dos Mosfet’s cresce muito com o
aumento da máxima tensão suportável, o que leva a uma redução da capacidade de corrente.
Deste modo, normalmente os Mosfet’s são utilizados para tensões inferiores a 500V. Para
maiores tensões a aplicação se restringe a baixas potências (menor que 100W).
Geralmente são usados em fontes de alimentação chaveadas, reatores eletrônicos, relés de
estado sólido de sistemas automotivos, etc.
O mais recente dos semicondutores desenvolvidos - o IGBT – vem se destacando pela sua
capacidade de condução de altas correntes e de suportar elevadas tensões (500A/1500V), além
da simplicidade de seu circuito de comando. Embora mais lentos que os Mosfet’s, os IGBT’s são
mais rápidos que os BJT’s permitindo operação em freqüências até os 30kHz.
Trata-se de uma tecnologia em crescente desenvolvimento, que permitiu a melhoria dos
acionamentos de motores CA, com o desenvolvimento dos Inversores de freqüência PWM. Sua
aplicação vai desde acionamento de motores até ignição automotiva.
A tabela abaixo mostra uma comparação entre os principais dispositivos semicondutores.
Diodos BJT MOSFET IGBT SCR
Comando em - corrente tensão tensão corrente Complexidade do circuito de
comando
- alta muito baixa muito baixa baixa
Capacidade de corrente
alta média baixa para média
média para alta alta
Tensão suportável
alta média baixa para média
média para alta alta
Freqüência de comutação
alta média alta média baixa
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 22
3. RETIFICADORES NÃO CONTROLADOS
3.1 - Introdução
Na maior parte das aplicações em eletrônica de potência, a entrada de energia tem a forma de
uma tensão alternada senoidal em 60 Hz, proveniente da rede, que é convertida em tensão
contínua para ser aplicada à carga. Isto é realizado através dos conversores CA-CC, também
chamado de Retificadores. Dependendo do semicondutor utilizado, SCR ou diodo, os retificadores
podem ser controlados ou não controlados respectivamente.
Os retificadores a diodo são encontrados em muitas aplicações, em geral como estágio de
entrada de fontes de potência, acionamento de máquinas, carregadores de baterias e outros.
Neste caso a tensão de saída do retificador não pode ser controlada.
Em algumas aplicações, tais como acionamento de máquinas CC, alguns acionamentos de
máquinas CA, controle de temperatura, galvanoplastia, e sistemas de transmissão em corrente
contínua, o controle da tensão de saída se faz necessário. Nestas situações são utilizados
retificadores controlados. Os retificadores controlados serão estudados no Capítulo 4.
3.2 - Retificador Monofásico de Meia Onda
a) Carga Resistiva
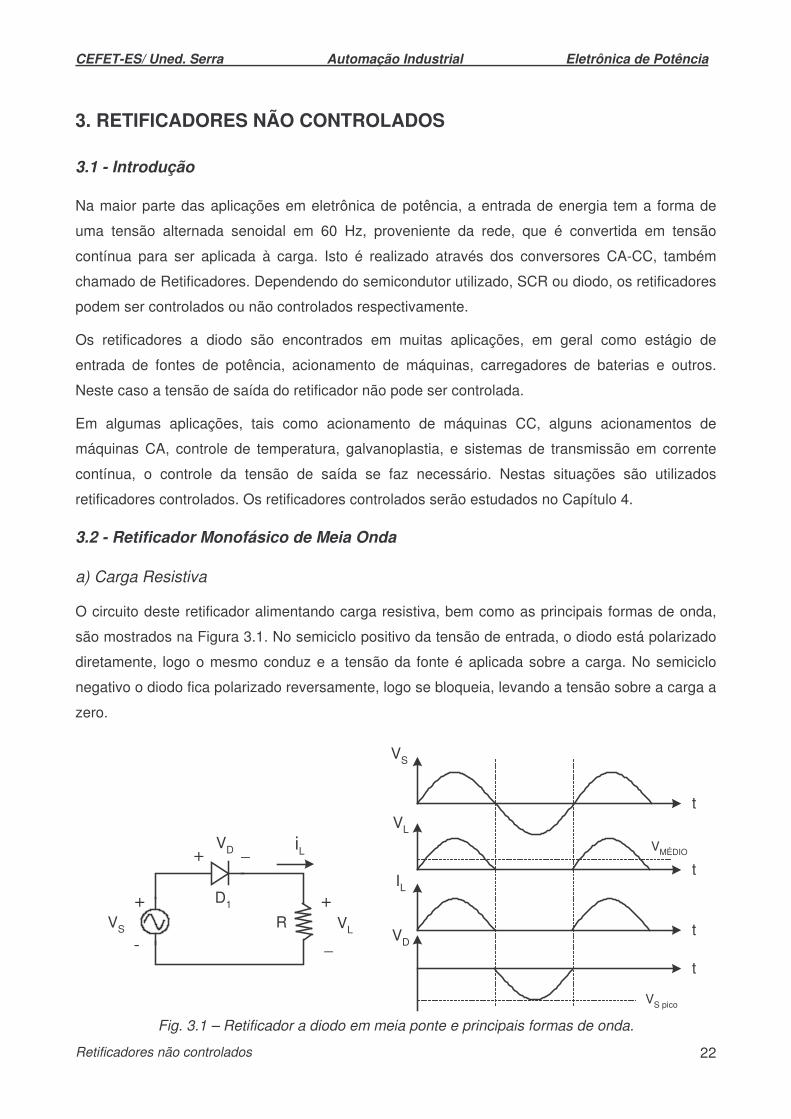
O circuito deste retificador alimentando carga resistiva, bem como as principais formas de onda,
são mostrados na Figura 3.1. No semiciclo positivo da tensão de entrada, o diodo está polarizado
diretamente, logo o mesmo conduz e a tensão da fonte é aplicada sobre a carga. No semiciclo
negativo o diodo fica polarizado reversamente, logo se bloqueia, levando a tensão sobre a carga a
zero.
Fig. 3.1 – Retificador a diodo em meia ponte e principais formas de onda.
iL
R VL
D1+
-VS
+ _VD
+
_
t
t
t
t
VS
VL
IL
VD
VMÉDIO
VS pico
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 23
A tensão média aplicada sobre a carga neste caso é:
Sendo VS RMS o valor eficaz da tensão da fonte de entrada. Por exemplo, para uma tensão da rede
de 127V, a tensão média de saída deste retificador será de 57V.
E a corrente média sobre na carga é dada por:
Algumas vezes é conveniente o uso do valor eficaz da tensão da carga ao invés do valor médio. O
valor eficaz da tensão na carga é dado por:
RMSSRMSL VV ×= 707,0
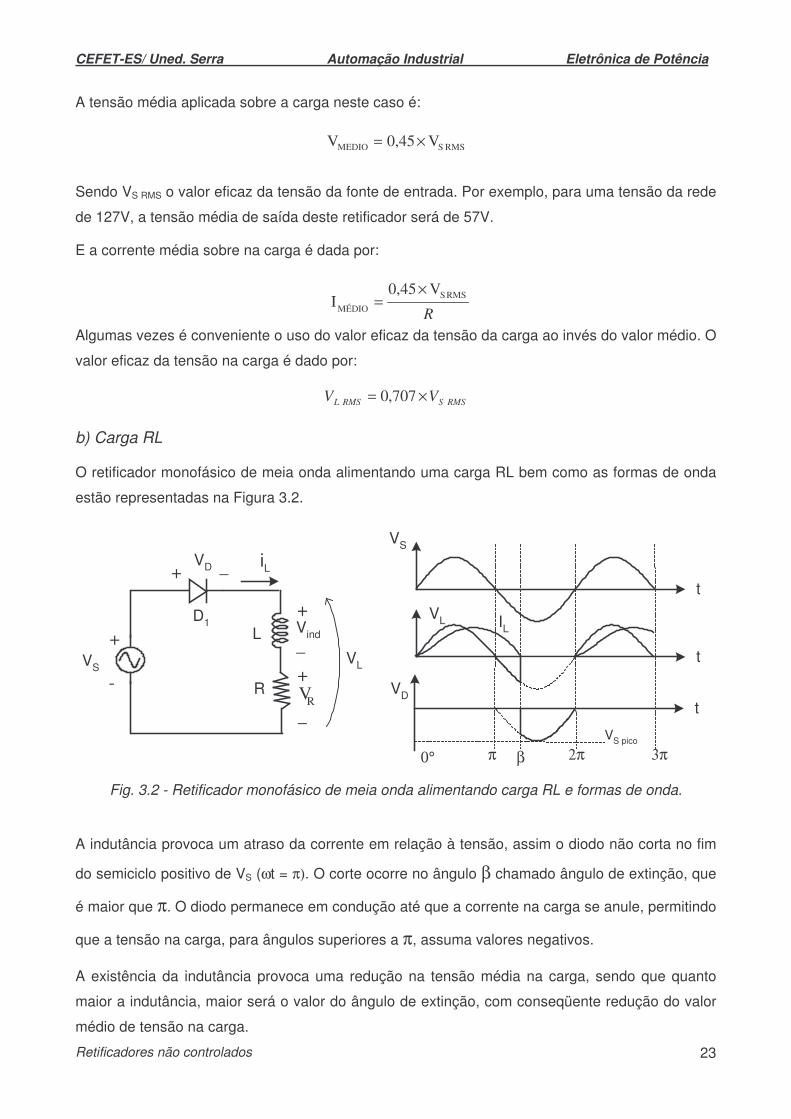
b) Carga RL
O retificador monofásico de meia onda alimentando uma carga RL bem como as formas de onda
estão representadas na Figura 3.2.
iL
D1
+ _VD
R
VL+
_VR
L+
_Vind+
-VS
t
t
t
VS
VL IL
VD
VS pico
π 2π 3πβ0°
Fig. 3.2 - Retificador monofásico de meia onda alimentando carga RL e formas de onda.
A indutância provoca um atraso da corrente em relação à tensão, assim o diodo não corta no fim
do semiciclo positivo de VS (ωt = π). O corte ocorre no ângulo β chamado ângulo de extinção, que
é maior que π. O diodo permanece em condução até que a corrente na carga se anule, permitindo
que a tensão na carga, para ângulos superiores a π, assuma valores negativos.
A existência da indutância provoca uma redução na tensão média na carga, sendo que quanto
maior a indutância, maior será o valor do ângulo de extinção, com conseqüente redução do valor
médio de tensão na carga.
RMSSMEDIO V0,45V ×=
RRMSS
MÉDIO
V0,45I
×=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 24
c) Carga RL com Diodo de "Roda-Livre"
Para solucionar os problemas causados pela
presença da indutância, utiliza-se o diodo de
roda-livre, também conhecido como diodo de
circulação, diodo de retorno ou diodo de
recuperação. O retificador é apresentado na
Figura 3.3.
Na Figura 3.4 estão representadas as duas etapas de funcionamento do retificador contendo o
diodo de roda-livre.
Fig. 3.4 - Etapas de funcionamento para o retificador com diodo de "roda-livre".
Durante o semiciclo positivo da tensão VS de alimentação, o diodo D1 conduz a corrente de carga
IL e o diodo DRL como está polarizado reversamente, está na região de corte. Nesta etapa a tensão
na carga é igual à tensão de entrada.
No semiciclo negativo da tensão VS, a corrente de carga, devido à indutância, circula no diodo de
"roda-livre" DRL, que está polarizado diretamente nesta etapa. Em razão disso, o diodo D1
polarizado reversamente está bloqueado e a
tensão na carga é nula.
O diodo de roda-livre permanece em
condução até que a corrente de carga caia
até zero. Isso se dá quando a energia
armazenada no indutor é completamente
descarregada. As formas de onda estão
representadas na Figura 3.5.
D1
VS
R
L
DRL
Fig. 3.3 - Retificador Monofásico de Meia Onda com Diodo de circulação.
D1
R
VL+
_VR
L
+
_Vind+
-VS
DRL
iL D1
R
VL+
_VR
L
+
_Vind
+
-
VSDRL
iL
+_
1° etapa 2° etapa
t
t
t
VS
VL
IL
VMÉDIO
Fig. 3.5 - Formas de onda na carga.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 25
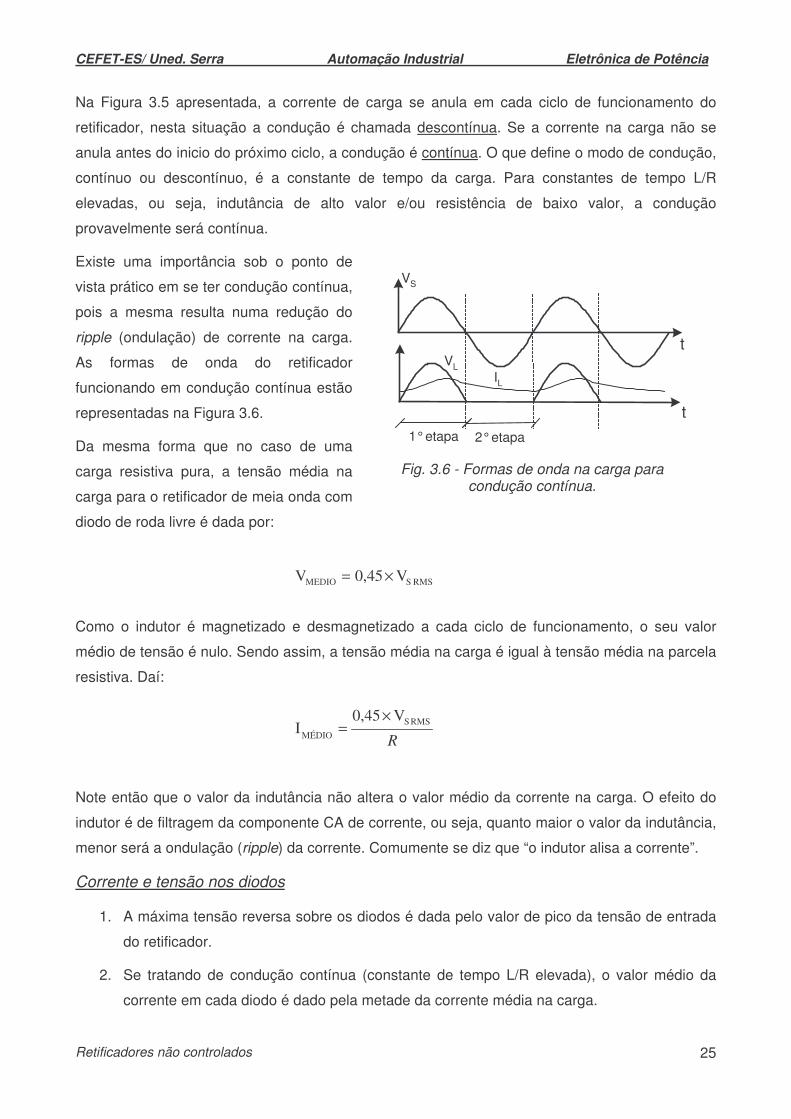
Na Figura 3.5 apresentada, a corrente de carga se anula em cada ciclo de funcionamento do
retificador, nesta situação a condução é chamada descontínua. Se a corrente na carga não se
anula antes do inicio do próximo ciclo, a condução é contínua. O que define o modo de condução,
contínuo ou descontínuo, é a constante de tempo da carga. Para constantes de tempo L/R
elevadas, ou seja, indutância de alto valor e/ou resistência de baixo valor, a condução
provavelmente será contínua.
Existe uma importância sob o ponto de
vista prático em se ter condução contínua,
pois a mesma resulta numa redução do
ripple (ondulação) de corrente na carga.
As formas de onda do retificador
funcionando em condução contínua estão
representadas na Figura 3.6.
Da mesma forma que no caso de uma
carga resistiva pura, a tensão média na
carga para o retificador de meia onda com
diodo de roda livre é dada por:
Como o indutor é magnetizado e desmagnetizado a cada ciclo de funcionamento, o seu valor
médio de tensão é nulo. Sendo assim, a tensão média na carga é igual à tensão média na parcela
resistiva. Daí:
Note então que o valor da indutância não altera o valor médio da corrente na carga. O efeito do
indutor é de filtragem da componente CA de corrente, ou seja, quanto maior o valor da indutância,
menor será a ondulação (ripple) da corrente. Comumente se diz que “o indutor alisa a corrente”.
Corrente e tensão nos diodos
1. A máxima tensão reversa sobre os diodos é dada pelo valor de pico da tensão de entrada
do retificador.
2. Se tratando de condução contínua (constante de tempo L/R elevada), o valor médio da
corrente em cada diodo é dado pela metade da corrente média na carga.
RMSSMEDIO V0,45V ×=
RRMSS
MÉDIO
V0,45I
×=
1° etapa 2° etapa
t
t
VS
VLIL
Fig. 3.6 - Formas de onda na carga para condução contínua.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 26
3.3 - Retificador Monofásico de Onda Completa em Ponte
a) Carga Resistiva
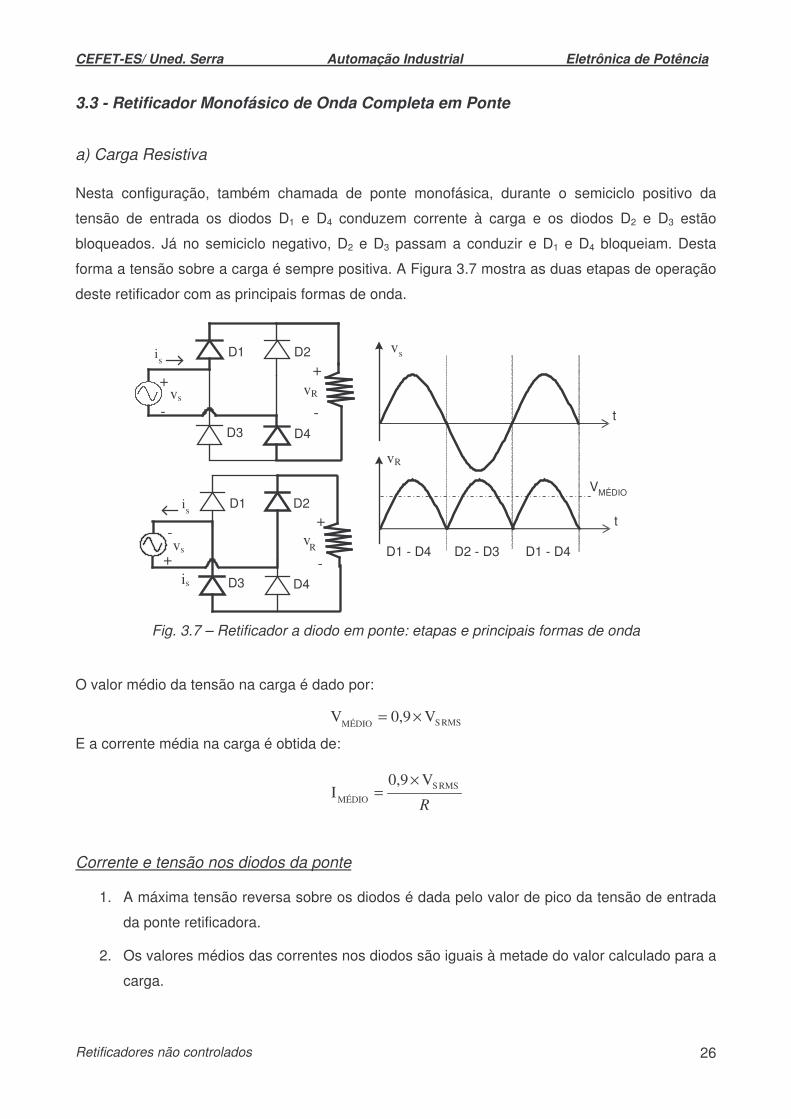
Nesta configuração, também chamada de ponte monofásica, durante o semiciclo positivo da
tensão de entrada os diodos D1 e D4 conduzem corrente à carga e os diodos D2 e D3 estão
bloqueados. Já no semiciclo negativo, D2 e D3 passam a conduzir e D1 e D4 bloqueiam. Desta
forma a tensão sobre a carga é sempre positiva. A Figura 3.7 mostra as duas etapas de operação
deste retificador com as principais formas de onda.
Fig. 3.7 – Retificador a diodo em ponte: etapas e principais formas de onda
O valor médio da tensão na carga é dado por:
E a corrente média na carga é obtida de:
Corrente e tensão nos diodos da ponte
1. A máxima tensão reversa sobre os diodos é dada pelo valor de pico da tensão de entrada
da ponte retificadora.
2. Os valores médios das correntes nos diodos são iguais à metade do valor calculado para a
carga.
RMSSMÉDIO V0,9V ×=
RRMSS
MÉDIO
V0,9I
×=
vs
vR
D1 D2
D4D3
vs+
-vR
+
-
D1 D2
D4D3
+
-vs
vR
+
-is
is
is
t
t
VMÉDIO
D1 - D4 D1 - D4D2 - D3

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 27
As oscilações que aparecem na tensão sobre a carga, denominam-se “ripple”. Este ripple de
tensão pode ser reduzido com a inclusão de um filtro capacitivo, normalmente um capacitor
eletrolítico de alto valor em paralelo com a carga.
b) Filtro Capacitivo
As formas de onda da Figura 3.8 comparam a tensão na carga e a corrente na fonte nas duas
situações, com e sem o capacitor de filtro. Quanto maior a capacitância menor será o ripple. Como
o capacitor se mantém carregado, os diodos são polarizados somente quando a tensão da rede
ultrapassa o valor da tensão de saída sobre o capacitor, portanto durante pequenos intervalos de
tempo. Isto provoca correntes não senoidais na fonte de alimentação, gerando harmônicas que
reduzem o fator de potência e poluem o sistema elétrico.
(a) (b)
Fig. 3.8 – Tensão de saída e corrente da rede para retificadores sem (a) e com (b) filtro capacitivo.
c) Carga RL
A ponte monofásica alimentando carga RL, bem como as principais formas de onda, estão
representados na Figura 3.9.
Fig. 3.9 – Retificador em ponte monofásica alimentando carga RL e formas de onda..
VR
iS
VR
iS
D1 D2
D4D3
+
-
vs
vRR
L vl
+
-VL
iL
t
t
VS
VL
IL
D1 - D4 D1 - D4D2 - D3
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 28
Com o uso do indutor, pode-se obter uma corrente de carga menos ondulada. Assim, quanto
maior o valor da indutância, menor será o ripple de corrente.
As expressões para cálculo de tensão e corrente médias são as mesmas para carga resistiva.
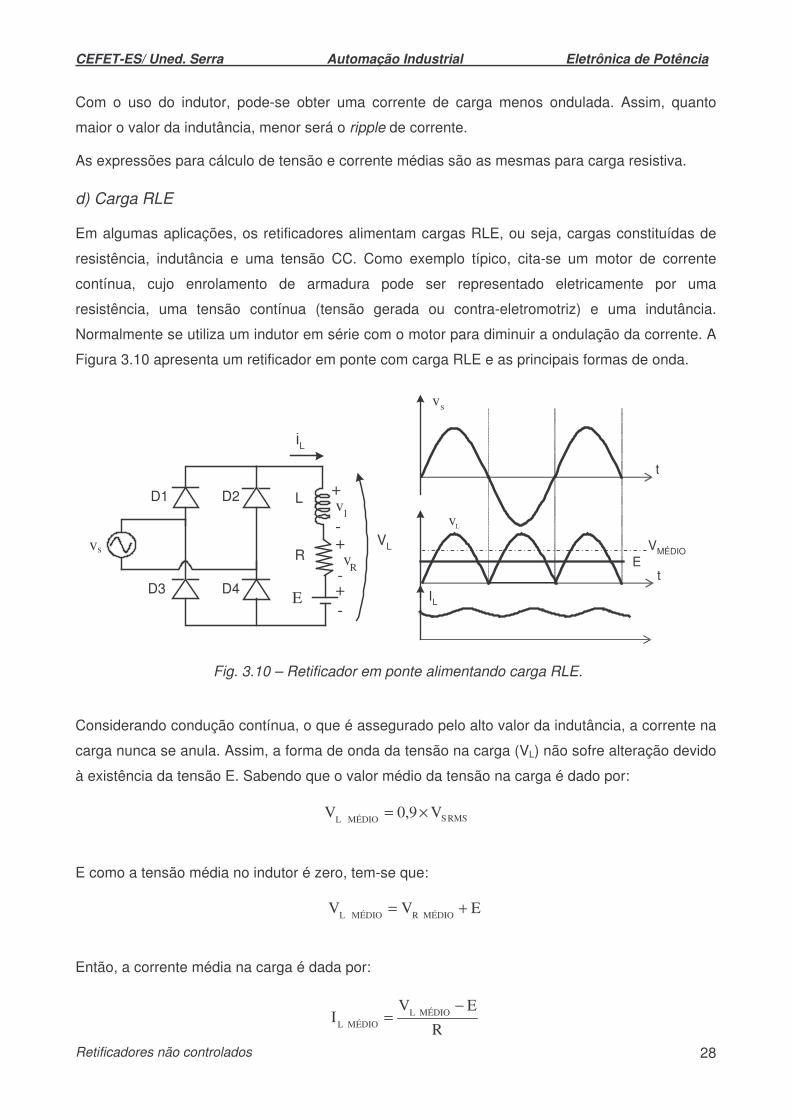
d) Carga RLE
Em algumas aplicações, os retificadores alimentam cargas RLE, ou seja, cargas constituídas de
resistência, indutância e uma tensão CC. Como exemplo típico, cita-se um motor de corrente
contínua, cujo enrolamento de armadura pode ser representado eletricamente por uma
resistência, uma tensão contínua (tensão gerada ou contra-eletromotriz) e uma indutância.
Normalmente se utiliza um indutor em série com o motor para diminuir a ondulação da corrente. A
Figura 3.10 apresenta um retificador em ponte com carga RLE e as principais formas de onda.
Fig. 3.10 – Retificador em ponte alimentando carga RLE.
Considerando condução contínua, o que é assegurado pelo alto valor da indutância, a corrente na
carga nunca se anula. Assim, a forma de onda da tensão na carga (VL) não sofre alteração devido
à existência da tensão E. Sabendo que o valor médio da tensão na carga é dado por:
E como a tensão média no indutor é zero, tem-se que:
Então, a corrente média na carga é dada por:
RMSSMÉDIO L V0,9V ×=
EVV MÉDIO RMÉDIO L +=
R
EVI MÉDIO L
MÉDIO L
−=
D1 D2
D4D3
vs +
-vR
R
L vl
+
-VL
iL
+-
E
vs
t
t
VMÉDIO
vL
E
IL

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 29
3.4 - Retificadores Trifásicos
Na indústria onde a rede trifásica está disponível, às vezes é preferível utilizar retificadores
trifásicos, que são constituídos de três pontos de entrada, cada um conectado a uma das fases da
rede, sendo indicados para níveis maiores de potência (maior que 2kW). Nesta configuração, o
ripple de tensão e de corrente são menores, conseqüentemente os filtros serão menores. Além
disso, os retificadores trifásicos apresentam maior valor médio de tensão de saída.
3.4.1 - Retificador Trifásico de Meia Onda
Na Figura 3.11 é apresentado o retificador,
o qual pode ser entendido como a
combinação de três retificadores
monofásicos de meia onda, cada um
alimentado por uma das fases da rede de
alimentação trifásica. Nesse tipo de
retificador, também conhecido como
retificador com ponto médio, note que é
necessário o uso do neutro do sistema de
alimentação.
As formas de onda deste retificador
alimentando uma carga resistiva estão
apresentadas na figura 3.12. Cada
diodo conduz durante um intervalo
correspondente a 120 graus da tensão
da rede, sendo que o diodo em
condução é sempre aquele conectado à
fase que apresenta o maior valor de
tensão instantânea.
O valor médio da tensão na carga é
dado pela expressão:
Sendo VRMS de FASE o valor eficaz da
tensão de fase (entre fase e neutro).
FASE de RMSMÉDIO V17,1V ×=
D1
D2
D3
A
B
C
N
+
-vLR
Fig. 3.11 - Retificador trifásico com ponto médio.
30° 150° 270° 390°
vAN vBN vCN
D1 D2 D3 Diodosconduzindo
VL
Fig. 3.12 - Formas de onda do retificador de ponto médio.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 30
O valor médio da corrente na carga é obtido de:
Com o uso de um indutor em série com a carga resistiva, pode-se obter um ripple de corrente
ainda menor comparado com carga resistiva pura. Observa-se que as expressões para o cálculo
da tensão e corrente médias continuam sendo válidas para carga RL.
Corrente e tensão nos diodos
A máxima tensão reversa sobre os diodos é dada pelo valor de pico da tensão de linha (tensão
entre fases) aplicada na entrada do retificador. Por quê?(...)
FASEdeRMSREVERSA VV ⋅⋅= 32
Como cada diodo conduz durante um terço do período, a corrente média nos diodos é dada por:
3.4.2 - Retificador Trifásico de Onda Completa
De grande importância Industrial,
o retificador trifásico de onda
completa, apresentado na Figura
3.13, é conhecido também como
ponte trifásica ou como Ponte de
Graetz.
Este retificador apresenta seis
etapas de operação ao longo de
um período da rede, sendo que
cada etapa é caracterizada por
um par de diodos em condução.
Em cada instante a corrente da carga flui por um diodo da parte superior (D1, D2 ou D3) e um da
parte inferior (D4, D5, ou D6). A operação pode ser explicada assumindo as tensões nas três fases
conforme a seqüência mostrada na Fig. 3.14.
Como pode ser visto, a tensão da fase A é a maior das três entre o período de 30º a 150º levando
D1 a condução. A fase B é a maior de 150º a 270º, fazendo D2 conduzir. E a fase C é a maior entre
270º e 390º (ou 30º do próximo ciclo), o que provoca a condução de D3. De forma análoga, cada
diodo inferior da ponte conduz quando a fase ligada ao mesmo apresenta o menor valor
RMÉDIO
MÉDIO
VI =
3I
I CARGANA MÉDIA MÉDIA D =
D1 D2
D5D4
VL
+
-
D3
D6
N
VAN
VBN
VCN
Fig. 3.13 – Retificador trifásico de onda completa.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 31
instantâneo dentre as três. Desta forma, pode-se constatar que a fase A tem menor tensão de
210º a 330º, fazendo D4 conduzir. A fase B de 330º a 450º (90º do próximo ciclo), o que faz D5
conduzir. E a fase C de 90º a 210º, levando D6 à condução. O resultado final dos estados de
condução são seis etapas de operação, tal que em cada etapa, dois diodos (um da parte superior
e um da parte inferior) estão conduzindo, como mostra a Fig. 3.14.
Em cada etapa de operação duas fases estão conectadas a carga, uma através de um diodo
superior e a outra através de um diodo inferior. A tensão de saída é dada pelo valor instantâneo
das tensões entre as fases conectadas à carga em cada uma das seis etapas de operação
mostradas, conforme mostra a Fig. 3.15.
Fig. 3.15 – Forma de onda da tensão de saída de um retificador trifásico de onda completa.
90° 150° 210° 270° 330° 390°
VAN VBN VCN
D1–D5 D1–D6 D2–D6 D2–D4 D3–D4 D3–D5
30°
Diodosconduzindo
Fig. 3.14 - Tensões nas três fases e diodos em condução nas seis etapas.
D1–D5 D1–D6 D2–D6 D2–D4 D3–D4 D3–D5Diodos
conduzindo
V MÉDIO
VAB VAC VBC VBA VCA VCB
30° 90° 150° 210° 270° 330° 390°
VL

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores não controlados 32
Note que a freqüência da componente fundamental da tensão é igual a 6 vezes a freqüência das
tensões de alimentação. Ou seja, para a rede de 60Hz, a tensão de saída apresenta oscilação de
360Hz.
O valor médio da tensão de saída é dada por:
Sendo VRMS é o valor eficaz da tensão entre fase e neutro.
O valor médio da corrente de saída é:
O ripple na corrente de carga pode ser reduzido ainda mais se for utilizado um indutor série.
Observa-se que as expressões para o cálculo da tensão e corrente médias continuam sendo
válidas para carga RL.
A máxima tensão reversa e a corrente média nos diodos são obtidas da mesma forma que no
retificador de ponto médio.
Entre as vantagens do retificador em ponte de Graetz sobre o retificador de ponto médio, citam-
se: maior tensão de saída (para uma mesma tensão de entrada); menor ripple da tensão de saída;
e maior freqüência da componente fundamental da tensão de saída (isso requer filtros de menor
peso e volume).
FASE de RMSMEDIO L V2,34V ×=
RMÉDIO L
MÉDIO
V I =

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 33
4. RETIFICADORES CONTROLADOS
Neste Capítulo serão apresentados os retificadores controlados usando SCR’s, enfocando o
funcionamento da parte de potência dos retificadores. Os circuitos de disparo dos SCR’s serão
apresentados no Capítulo 5.
4.1 - Retificador Monofásico Controlado de Meia Onda
Se substituirmos o diodo do retificador de meia onda por um SCR, tem-se um retificador
controlado, o qual permite variar a tensão de saída.
a) Carga Resistiva
O circuito e as formas de onda do retificador monofásico controlado de meia onda estão
representados na figura 4.1.
Fig. 4.1 - Retificador monofásico de meia onda e principais formas de onda.
No semiciclo positivo da tensão de entrada VS, o SCR está diretamente polarizado, entretanto o
mesmo não conduz, pois é necessária a aplicação de um pulso de corrente entre os terminais
gate e catodo para que ele entre em condução. Assim, no intervalo de 0° até αd , o SCR está
cortado e a tensão na carga é nula.
Transcorrido um certo ângulo αd (ângulo de disparo) após a passagem da tensão Vs por zero, o
circuito de disparo aplica um pulso de corrente (IG) entre os terminais gate e catodo do SCR
provocando seu disparo. Com isso, a tensão na carga passa ser igual à tensão de entrada.
iL
R VL
T1
+
-VS
+ _VT +
_
Circuitode
disparo
iGsincronismo
αd
t
t
t
VS
IL
VT
VS pico
t
VL
VMÉDIO
iMÉDIO
t
iG
αd αd
0° π π°≡ 02
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 34
Como a carga é resistiva, a forma de onda de corrente segue a forma de onda de tensão. No
instante em que a tensão de alimentação e conseqüentemente a tensão na carga passam por
zero, a corrente de carga também se anula provocando o corte do SCR.
No semiciclo negativo da tensão da fonte o SCR se mantém em corte. Portanto, durante este
intervalo, a tensão e corrente na carga são nulas. Somente no próximo ciclo, quando for atingido o
ângulo de disparo αd, é que ocorre o disparo e o processo se repete.
Note que com a variando-se o ângulo de disparo αd varia-se a tensão média na carga. Sendo VL
MÉDIO a tensão média na carga, esta pode ser obtida pela expressão:
Sendo VS RMS a tensão eficaz de entrada.
Nos ângulos mínimo e máximo, ocorre que:
αd = 0°, VL MÉDIO = 0,45VS RMS (semelhante ao retificador não controlado);
αd = 180°, VL MÉDIO = 0.
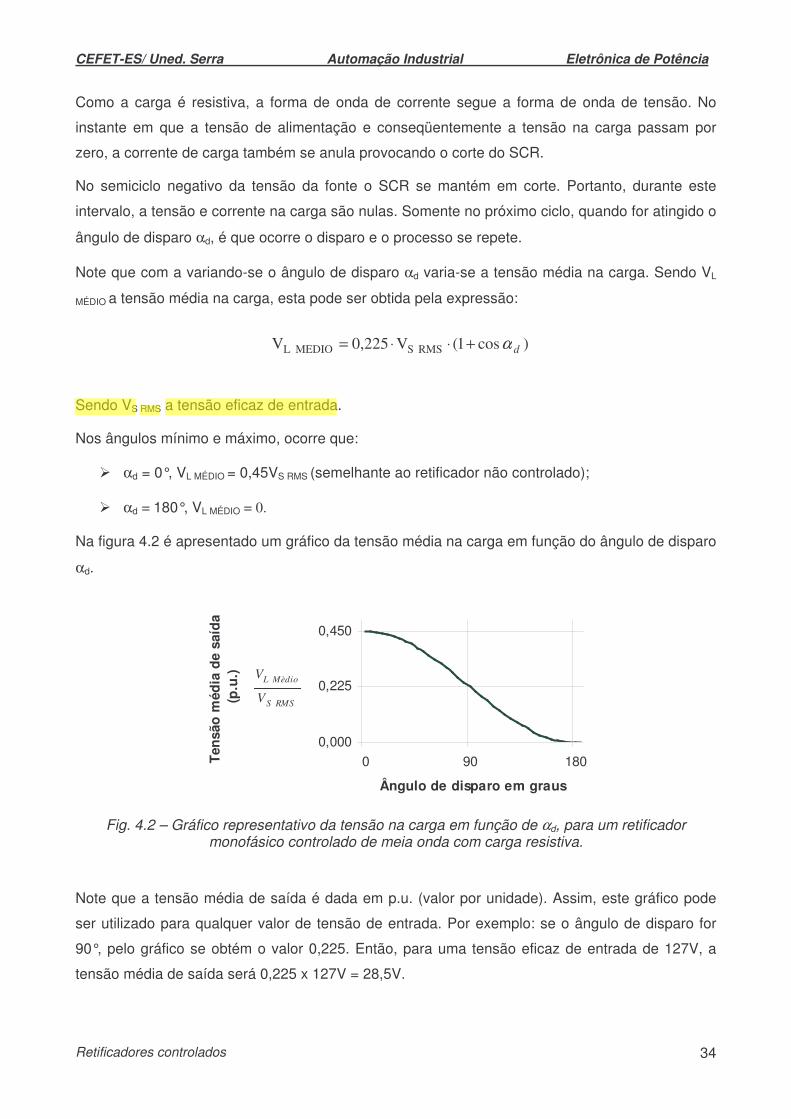
Na figura 4.2 é apresentado um gráfico da tensão média na carga em função do ângulo de disparo
αd.
Fig. 4.2 – Gráfico representativo da tensão na carga em função de αd, para um retificador monofásico controlado de meia onda com carga resistiva.
Note que a tensão média de saída é dada em p.u. (valor por unidade). Assim, este gráfico pode
ser utilizado para qualquer valor de tensão de entrada. Por exemplo: se o ângulo de disparo for
90°, pelo gráfico se obtém o valor 0,225. Então, para uma tensão eficaz de entrada de 127V, a
tensão média de saída será 0,225 x 127V = 28,5V.
0,000
0,225
0,450
0 90 180
Ângulo de disparo em graus
Tens
ão m
édia
de
saíd
a (p
.u.)
RMSS
MèdioL
V
V
)cos1(V0,225V RMS SMEDIO L dα+⋅⋅=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 35
b) Carga RL
Fig. 4.3 - Retificador de meia onda alimentando carga RL.
Com carga RL a corrente na carga se extingue num ângulo β superior a π. Sendo assim, a tensão
na carga se mantém igual à da fonte até que a corrente no SCR se anule. Note então que a
tensão na carga assume valores negativos. Isso causa uma redução no seu valor médio quando
comparado com carga resistiva pura.
Os fatores que determinam o valor médio da tensão na carga são a tensão de entrada, o ângulo
de disparo αd e o ângulo de extinção β. E como o ângulo β é influenciado pela carga, logo a tensão
média de saída dependerá da própria carga. Esse fato se constitui um grande empecilho deste
retificador para cargas RL.
c) Carga RL com diodo de “Roda Livre”
O circuito e as formas de onda para o retificador de meia onda com diodo de circulação estão
representados na Figura 4.4.
No intervalo de 0° até αd o SCR está cortado, sendo assim a tensão na carga é nula. No instante
correspondente ao ângulo αd, o SCR é disparado pela corrente de gate IG e a tensão na carga
passa ser igual à tensão da fonte.
No instante em que a tensão da fonte passa por zero, o diodo de retorno é polarizado diretamente
desviando a corrente de carga e fazendo com que o SCR bloqueie. A corrente circula então pelo
diodo, decaindo exponencialmente, e a tensão na carga se mantém nula.
iL
T1
R
VL
L+
-VS
iG
t
VLIL
VMÉDIO
t
VS
π 2πβ0°
t
iG
αdαd

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 36
Se o ângulo de disparo for elevado, é provável que a corrente se anule antes do próximo disparo,
caracterizando condução descontínua. Da mesma forma ocorre quando a carga apresenta baixa
constante de tempo L / R, ou em outras palavras, se a carga for ‘pouco indutiva’. Por outro lado,
para baixos ângulos de disparo e cargas com elevada constante de tempo, possivelmente a
condução será contínua.
Seja a expressão seguinte para o calculo do valor médio da tensão na carga.
Note que esta expressão é a mesma utilizada para o retificador de meia onda com carga resistiva
pura. Portanto, agora o valor médio da tensão na carga não depende do ângulo de extinção β, em
outras palavras, não depende da carga.
4.2 - Retificador Monofásico Controlado de Onda Completa em Ponte
a) Carga resistiva
O retificador, também chamado de ponte monofásica controlada, é formado por quatro SCR’s que
são comandados aos pares: T1-T4 e T2-T3, como mostra a Figura 4.5.
Quando a tensão de entrada é positiva, os SCR’s T1 e T4 podem ser disparados, permitindo um
caminho para a corrente circular entre a fonte e a carga. Com carga resistiva, a corrente chega a
zero junto com a tensão, neste instante este par de tiristores é cortado.
No semiciclo negativo da rede, os SCR’s T2 e T3 conduzem a partir do pulso de gatilho, desta
forma a corrente de carga permanece unidirecional, mesmo que a fonte seja alternada.
T1
+
-VS
iG
DRL
R
L
iL
VL t
VLIL
VMÉDIO
t
VS
π 2πβ0°
t
iG
αdαd
T1 DRL
Fig. 4.4 - Retificador monofásico de meia onda a tiristor com diodo de circulação.
)cos1(V0,225V RMS SMEDIO L dα+⋅⋅=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 37
t
iG
αd αdαd
t
VS
0° π π°≡ 02
t
VL
VMÉDIO
T1 - T4 T2 - T3 T1 - T4
T1 T2
T4T3
vs
+
-
vL
+
-
Fig. 4.5 – Retificador monofásico controlado em ponte e formas de onda.
A variação da tensão de saída é obtida variando-se o ângulo de disparo αd dos SCR’s. A tensão
média na carga é dada pela expressão a seguir, onde VS RMS é o valor eficaz da tensão de
entrada.
b) Carga RL
Na Figura 4.6a estão representadas as formas de onda de tensão e corrente na carga quando a
ponte de SCR’s alimenta uma carga RL. Devido ao atraso da corrente em relação à tensão,
quando esta passa por zero a corrente ainda circula pelos SCR’s e a carga, e enquanto a corrente
não se anula, a tensão de carga se mantém igual à da fonte. Quando a corrente se anular, o par
de SCR’s em condução é cortado, e a tensão na carga se anula. Essa permanecerá nula até que
ocorra o próximo disparo provocando a condução do outro par de SCR’s.
iG
t
VL
t
αd αdαd
IL
T1 - T4T1 - T4 T2 - T3
iG
t
VL
t
αd αdαd
IL
T1 - T4T1 - T4 T2 - T3
(a) (b)
Fig. 4.6 – Formas de onda para carga RL; (a) em condução descontínua, e (b) em condução contínua.
)cos1(V0,45V RMS SMEDIO L dα+⋅⋅=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 38
Como a corrente se anula antes da ocorrência do próximo disparo, a condução é descontínua.
Se a indutância L for grande o suficiente para que a corrente não se anule antes do próximo
disparo, a condução é contínua. A Figura 4.6b apresenta as formas de onda para este caso. A
condução contínua é possível para cargas com alta constante de tempo (L/R) e baixos ângulos de
disparo (inferiores a 90°, por quê?...)
4.3 - Retificador Monofásico Semicontrolado
É possível economizar em componentes, substituindo dois SCR’s da ponte monofásica controlada
por dois diodos como mostra a Figura 4.7. O retificador obtido é conhecido como retificador
monofásico semicontrolado, ou também como ponte monofásica semicontrolada, ou ainda como
ponte monofásica mista.
(a) (b)
Fig. 4.7 – Possibilidades para ponte mista;(a) simétrica, (b) assimétrica.
O funcionamento do retificador semicontrolado é semelhante ao do controlado, sendo que a
diferença está no instante de bloqueio. A Figura 4.8 apresenta as formas de onda e as quatro
etapas de operação da ponte mista do tipo simétrica para carga RL.
Etapa 1: No instante correspondente ao ângulo de disparo αd, durante o semiciclo positivo da
tensão de entrada, o SCR T1 é disparado permitindo que a corrente IL circule por ele e pelo diodo
D2. Nesta etapa a tensão de saída é igual à tensão de entrada.
Etapa 2: Quando a tensão de entrada passa por zero e na eminência de assumir valores
negativos, o diodo D1 fica diretamente polarizado entrado em condução. Em conseqüência, o
diodo D2 fica reversamente polarizado, entrando em corte. A corrente de carga passa a circular
por T1 e D1 mantendo a tensão na carga nula. Dependendo da natureza da carga, a corrente pode
chegar a zero antes do próximo disparo.
Etapa 3: no semiciclo negativo de VS, quando T2 é disparado, T1 é cortado e a corrente da carga é
conduzida por T2 e o diodo D1, mantendo a tensão na saída positiva.
T1 D1
D2T2
carg
a
Vs
T1 T2
D1
carg
a
Vs
D2
DRL

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 39
Etapa 4: Quando a tensão de entrada passa por zero e na eminência de assumir valores positivos,
o diodo D2 entra em condução e o diodo D1 é cortado. A corrente de carga passa a circular por T2
e D2 mantendo a saída com tensão nula.
No caso de carga resistiva pura, como a corrente se anula junto com a tensão, as etapas 2 e 4
não ocorrem, já que o SCR em condução é cortado evitando estas etapas.
t
iG
αd αdαd
t
VLiL
T1-D2 T2-D1T1-D2T1-D1 T2-D2
(1) (2) (3) (4) (1) etapas
T1 T2
D2D1R
VL
L
iL
VS
+_
T1 T2
D2D1R
VL
L
iL
VS+_
T1 T2
D2D1R
VL
L
iL
VS+_
T1 T2
D2D1R
VL
L
iL
VS+_
etapa (1) etapa (2)
etapa (3) etapa (4)
Fig. 4.8 – Formas de onda e etapas de operação da ponte mista.
Considerando que T1 esteja em condução, note que se T2 não for disparado, e supondo que T1
continue a conduzir, em função da elevada constante de tempo elétrica da carga (carga muito
indutiva), no próximo semiciclo positivo, a fonte será novamente acoplada à carga através de T1 e
D2 fornecendo-lhe mais corrente. Ou seja, a simples retirada dos pulsos de disparo não garante o
desligamento entre carga e fonte. Para que isso ocorra é necessário diminuir o ângulo de disparo
para que a corrente se torne descontínua e assim T1 corte. Obviamente o mesmo comportamento

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 40
pode ocorrer com respeito ao outro par de componentes. Isto pode ser evitado pela inclusão do
diodo de roda livre DRL, o qual entrará em condução quando a tensão de entrada se inverter,
cortando o SCR e o diodo que estavam em condução.
A vantagem da montagem assimétrica é que os catodos dos SCR’s estão em ponto comum, de
modo que os sinais de disparo podem estar num mesmo potencial.
No caso da ponte mista assimétrica, como existe um caminho de livre circulação formado pelos
diodos D1 e D2, toda vez que a fonte de entrada inverte a polaridade, a corrente de carga é
conduzida pelos diodos, levando ao corte o SCR que estava em condução. Assim, a ponte
assimétrica não apresenta o problema mencionado, o que dispensa o uso do diodo DRL.
A tensão média de saída numa ponte mista monofásica é dada pela expressão abaixo.
4.4 - Retificador Trifásico Controlado de Meia Onda
a) Carga resistiva
O circuito deste retificador, conhecido também como
retificador trifásico controlado de ponto médio, está
representada na Figura 4.9.
O funcionamento do retificador controlado é similar
ao retificador não controlado, a diferença está na
entrada em condução dos semicondutores de
potência. Isto faz com que se torne possível variar o
valor da tensão de saída.
Seja a Figura 4.10a, na qual estão representadas as
formas de onda das três fases e a tensão na carga
para ângulo de disparo igual a 30°. Observe que para o retificador trifásico, o ângulo de disparo é
zero no instante em que duas ondas de tensão se interceptam e não quando a tensão passa por
zero, como é o caso dos retificadores monofásicos. Percebe-se que o SCR T1, por exemplo,
somente pode conduzir após os 30o da fase A. Isso se deve ao fato de que antes dos 30° desta
fase, T1 está reversamente polarizado, logo impossibilitado de conduzir. Portanto, os disparos dos
tiristores devem ser sincronizados com a rede e atrasados de 30º para possibilitar qualquer
variação da tensão de saída.
Na Figura 4.10b estão apresentadas as formas de onda para o ângulo de disparo de 60°.
)cos1(V0,45V RMS SMEDIO L dα+⋅⋅=
T1
T2
T3
A
B
C
N
R
Fig. 4.9 - Retificador trifásico de ponto médio.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 41
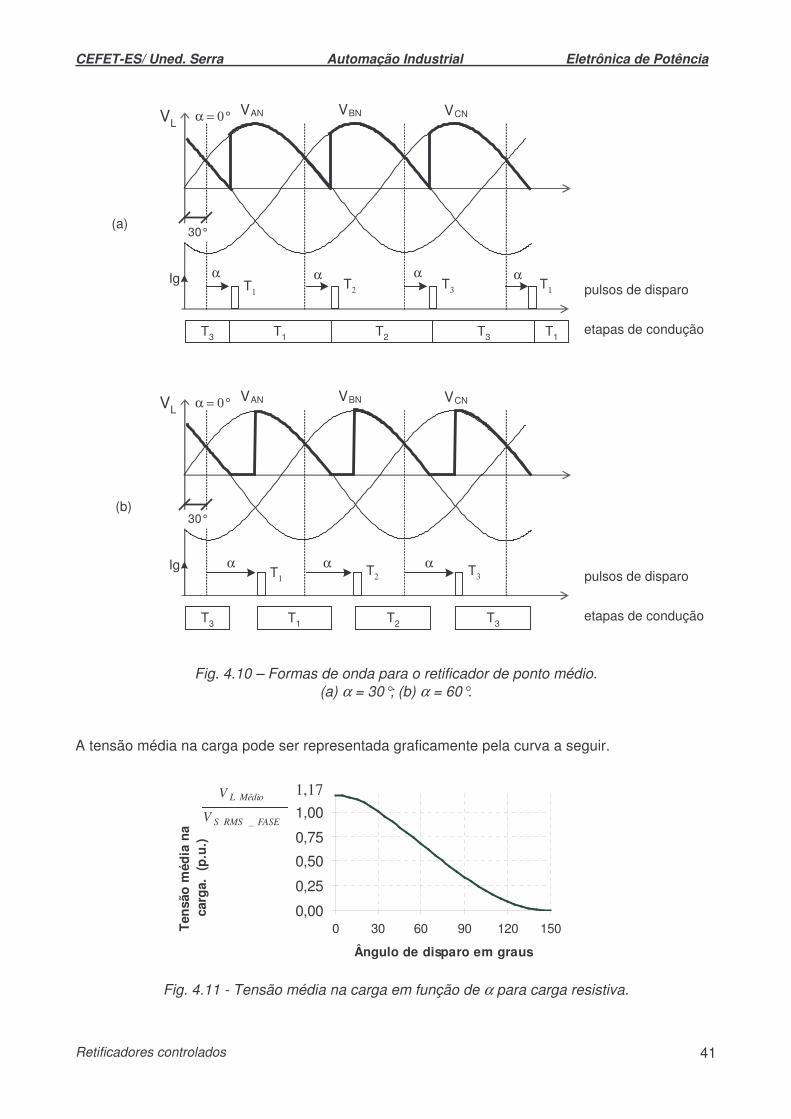
Fig. 4.10 – Formas de onda para o retificador de ponto médio. (a) α = 30°; (b) α = 60°.
A tensão média na carga pode ser representada graficamente pela curva a seguir.
Fig. 4.11 - Tensão média na carga em função de α para carga resistiva.
0,00
0,25
0,50
0,75
1,00
0 30 60 90 120 150
Ângulo de disparo em graus
Tens
ão m
édia
na
carg
a. (
p.u.
)
FASERMSS
MédioL
V
V
_
1,17
T1αα αIg T2 T3 pulsos de disparo
etapas de condução
VLVAN VBN VCN
T1 T2 T3T3
30°
α = 0°
T1
αα αIg T2 T3α
T1 pulsos de disparo
etapas de condução
VLVAN VBN VCN
T1 T2 T3T3 T1
30°
α = 0°
(a)
(b)

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 42
Deve-se notar que:
1) Se αd = 0o, obtém-se resultado semelhante ao retificador a diodo, onde VL MEDIO = 1,17 VSRMS ,
que é o maior valor de tensão média na carga;
2) Se α = 150o, tem-se VL medio = 0.
b) Carga RL
O retificador de ponto médio alimentando carga RL pode apresentar condução contínua ou
descontínua, dependendo da carga e do ângulo de disparo.
A Figura 4.12 mostra a tensão na carga em condução contínua. Como a corrente na carga não se
anula, a tensão na carga assume valores negativos até que ocorra o próximo disparo.
Fig. 4.12 – Tensão na carga para carga RL em condução contínua.
Para evitar que a tensão na carga assuma valores instantaneamente negativos, utiliza-se um
diodo de roda-livre em antiparalelo com a carga, permitindo a circulação de corrente mantendo a
tensão na carga nula.
4.5 - Retificador Trifásico Controlado de Onda Completa
a) Carga Resistiva
Também conhecido como ponte trifásica controlada, este retificador está apresentado na figura
4.13. Como é possível atrasar a entrada em condução dos SCR’s pode-se variar o valor da tensão
de saída.
T1αα αIg T2 T3 pulsos de disparo
etapas de condução
VLVAN VBN VCN
T1 T2 T3T3
30°
α = 0°
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 43
T1 T2
T5T4
R
+
-
T3
T6
N VL
VAN
V BN
V CN
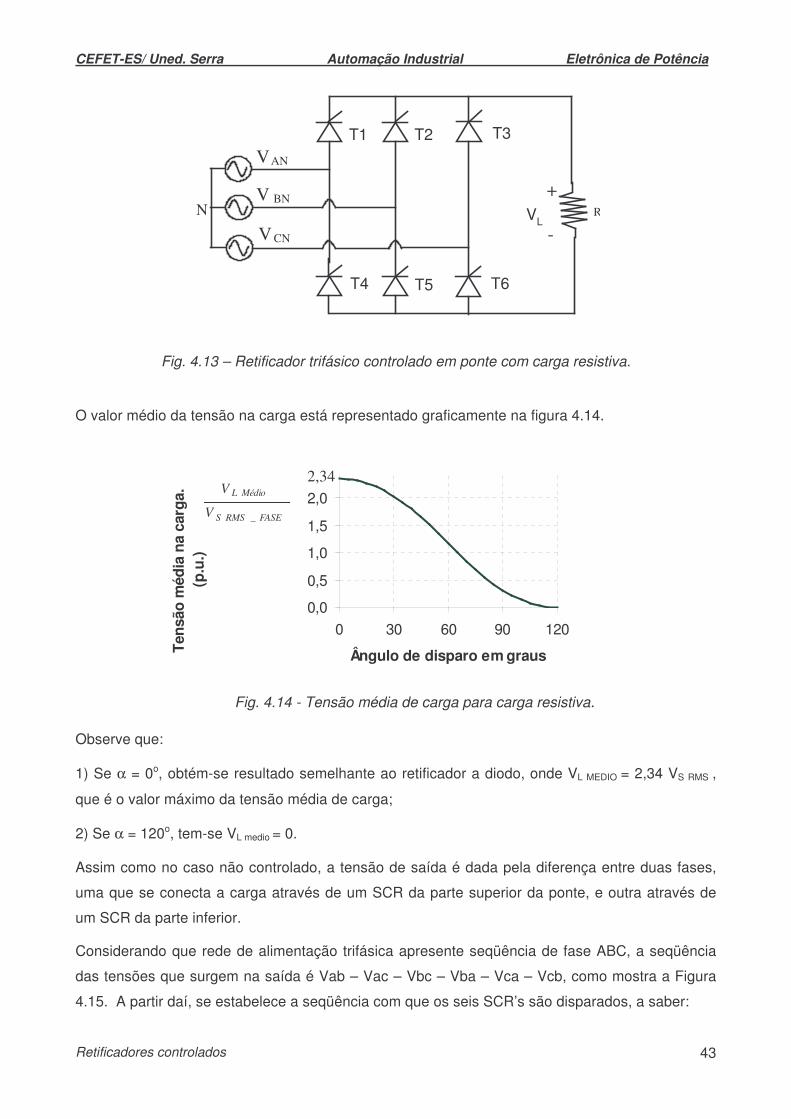
Fig. 4.13 – Retificador trifásico controlado em ponte com carga resistiva.
O valor médio da tensão na carga está representado graficamente na figura 4.14.
Fig. 4.14 - Tensão média de carga para carga resistiva.
Observe que:
1) Se α = 0o, obtém-se resultado semelhante ao retificador a diodo, onde VL MEDIO = 2,34 VS RMS ,
que é o valor máximo da tensão média de carga;
2) Se α = 120o, tem-se VL medio = 0.
Assim como no caso não controlado, a tensão de saída é dada pela diferença entre duas fases,
uma que se conecta a carga através de um SCR da parte superior da ponte, e outra através de
um SCR da parte inferior.
Considerando que rede de alimentação trifásica apresente seqüência de fase ABC, a seqüência
das tensões que surgem na saída é Vab – Vac – Vbc – Vba – Vca – Vcb, como mostra a Figura
4.15. A partir daí, se estabelece a seqüência com que os seis SCR’s são disparados, a saber:
0,0
0,5
1,0
1,5
2,0
0 30 60 90 120
Ângulo de disparo em grausTens
ão m
édia
na
carg
a.
(p.u
.)
FASERMSS
MédioL
V
V
_
2,34

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 44
T1 – T6 – T2 – T4 – T3 – T5. Tal seqüência de disparo ocorre a cada ciclo de rede, resultando em
um disparo a cada 60°.
Exemplificando, considere que os SCR’s T1 e T5 estejam em condução. Nesta etapa a tensão na
carga é dada pela diferença entre as fases A e B, ou seja, a tensão Vab. O próximo SCR a ser
disparado é T6, provocando o corte de T5 e iniciando uma nova etapa de condução. Nesta nova
etapa a tensão de saída é dada por Vac, pois as fases A e C estão ligadas a carga.
Assim como no retificador trifásico controlado de ponto médio, os disparos dos tiristores devem
ser sincronizados com a rede e atrasados em 30º para possibilitar qualquer variação da tensão de
saída. Sendo assim, o SCR T1 por exemplo, somente poderá ser disparado após passados os 30°
da fase A, pois antes deste instante o mesmo estará reversamente polarizado.
Como na ponte trifásica o neutro do sistema está ausente, é conveniente nos referirmos às
tensões de linha (fase-fase) ao invés de tensões de fase. Desta forma, no mesmo exemplo, no
instante em que a fase A passa pelos 30°, a tensão Vab passa pelos 60°(30° de defasamento).
Assim, o disparo de T1 só será possível após os 60° da tensão Vab (que é o mesmo que 30° após
a passagem da fase A por 0°).
Fig. 4.15 – Formas de onda de tensão na carga para α = 30°.
VAN VBN VCN
T1 T6αα α α α
Ig
VAB VAC VBC VBA VCAVCB VAB
30°
T1 T2 T3T3
T5 T6 T4 T5
T1
αT2 T4 T3 T5
αT1
pulsos de disparo
etapas de condução
VL
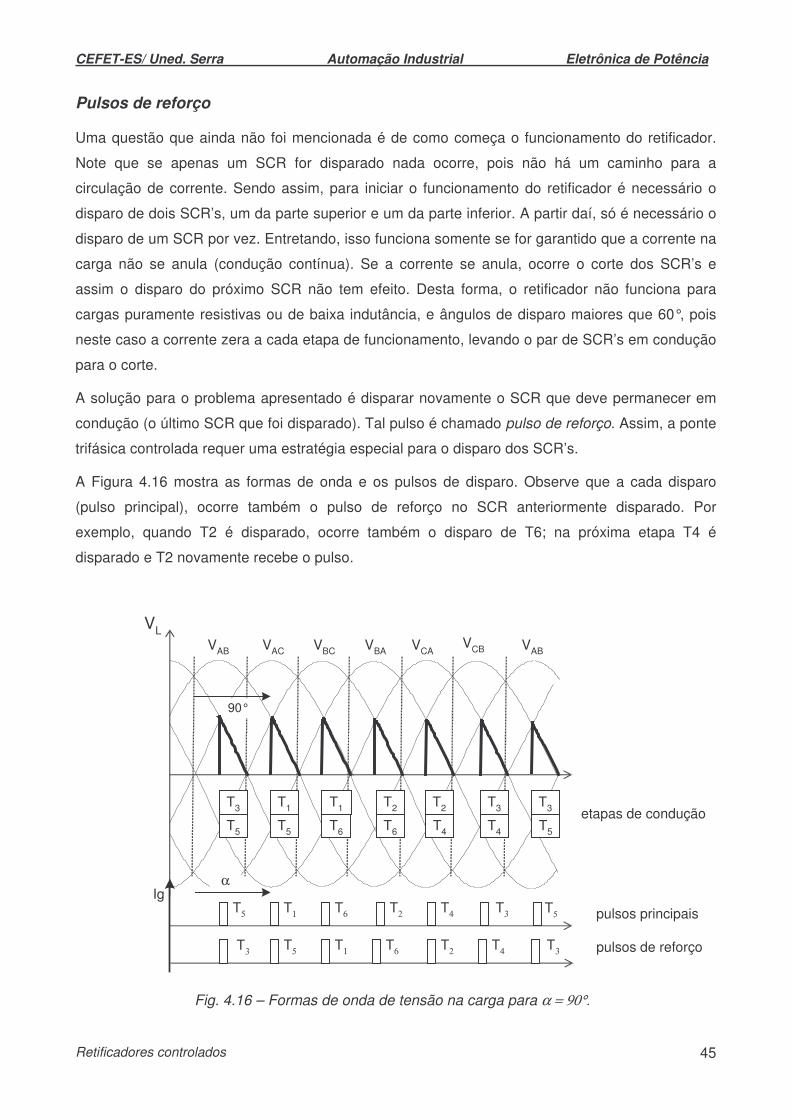
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 45
Pulsos de reforço
Uma questão que ainda não foi mencionada é de como começa o funcionamento do retificador.
Note que se apenas um SCR for disparado nada ocorre, pois não há um caminho para a
circulação de corrente. Sendo assim, para iniciar o funcionamento do retificador é necessário o
disparo de dois SCR’s, um da parte superior e um da parte inferior. A partir daí, só é necessário o
disparo de um SCR por vez. Entretando, isso funciona somente se for garantido que a corrente na
carga não se anula (condução contínua). Se a corrente se anula, ocorre o corte dos SCR’s e
assim o disparo do próximo SCR não tem efeito. Desta forma, o retificador não funciona para
cargas puramente resistivas ou de baixa indutância, e ângulos de disparo maiores que 60°, pois
neste caso a corrente zera a cada etapa de funcionamento, levando o par de SCR’s em condução
para o corte.
A solução para o problema apresentado é disparar novamente o SCR que deve permanecer em
condução (o último SCR que foi disparado). Tal pulso é chamado pulso de reforço. Assim, a ponte
trifásica controlada requer uma estratégia especial para o disparo dos SCR’s.
A Figura 4.16 mostra as formas de onda e os pulsos de disparo. Observe que a cada disparo
(pulso principal), ocorre também o pulso de reforço no SCR anteriormente disparado. Por
exemplo, quando T2 é disparado, ocorre também o disparo de T6; na próxima etapa T4 é
disparado e T2 novamente recebe o pulso.
Fig. 4.16 – Formas de onda de tensão na carga para α = 90°.
VAB VAC VBC VBA VCAVCB VAB
90°
T1 T2 T3
T5 T6 T4 T5
T1 T6
IgT2 T4 T3 T5
α
T5
T1T3 T2 T3
T5 T6 T4
T1 T6 T2 T4 T3T3 T5
pulsos principais
pulsos de reforço
etapas de condução
VL

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 46
b) Carga RL
Assim como ocorre em outros retificadores, a ponte trifásica controlada alimentando carga RL
apresenta os mesmos inconvenientes já discutidos, ou seja, quando a tensão passa por zero, a
corrente na carga não se anula, fazendo com que a tensão de saída assuma valores
instantaneamente negativos até que ocorra o próximo disparo. Assim sendo, além do ângulo de
disparo a própria carga influencia no valor médio de tensão na saída.
Para evitar tais problemas pode ser utilizado um diodo de roda-livre em anti-paralelo com a carga,
permitindo a circulação de corrente mantendo a tensão na carga nula.
4.6 - Retificador Trifásico Semicontrolado
Uma alternativa mais simples para um retificador trifásico de onda completa que possibilita
variação de tensão de saída é o retificador semicontrolado ou ponte trifásica mista, que esta
apresentada na Figura 4.17.
Fig. 4.17 – Retificador Trifásico Semicontrolado.
Em muitas aplicações é interessante o emprego da ponte mista ao invés da ponte completa. A
ponte mista, por utilizar circuitos de disparo mais simples e apenas 3 SCR’s, apresenta um menor
custo.
A Figura 4.18 mostra a forma de onda de tensão na saída para ângulo de disparo igual a 30°, bem
como as etapas de operação.
Como em todo retificador trifásico a SCR, o ângulo de disparo se inicia no instante em que duas
tensões de fase se interceptam.
O funcionamento é mais simples do que o da ponte completa, pois neste caso, os semicondutores
inferiores da ponte são diodos, deste modo, entram em condução naturalmente à medida que são
diretamente polarizados.
T1 T2
D2D1
VAN
R
+
-
T3
D3
NVBN
VCN
VL
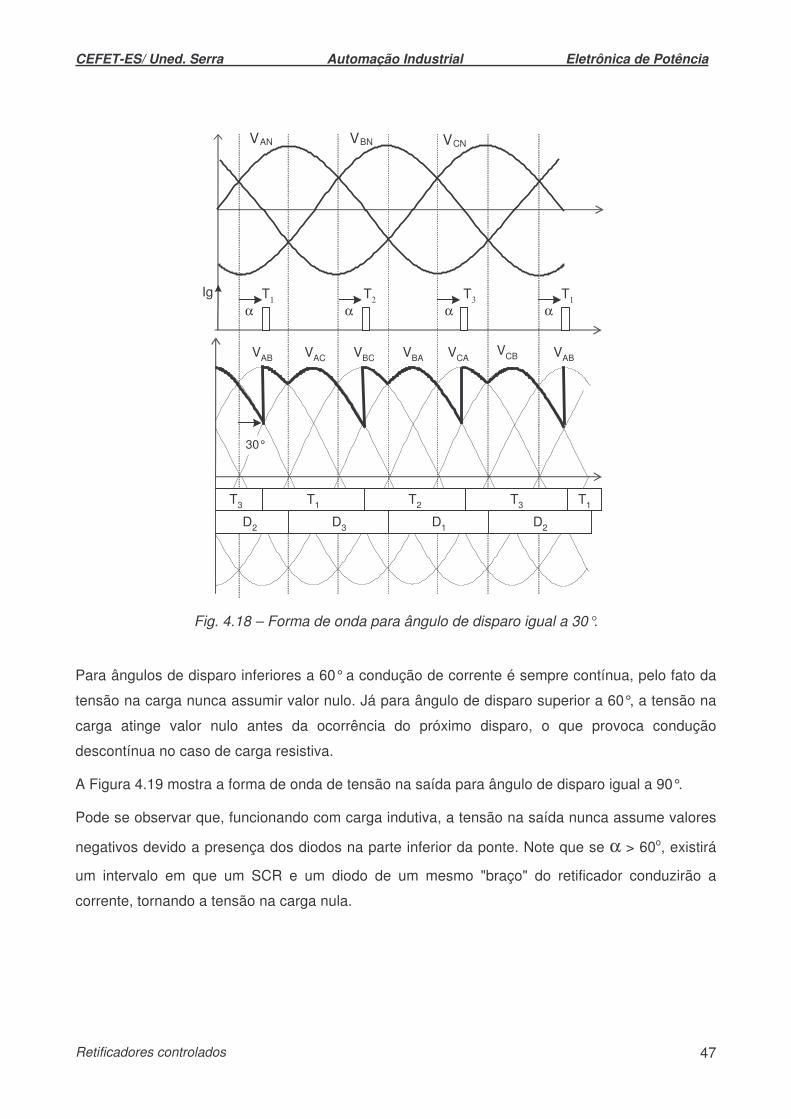
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 47
VAN VBN VCN
T1αα α
Ig
VAB VAC VBC VBA VCAVCB VAB
30°
T1 T2 T3T3
D2 D3 D1 D2
T1
T2 T3α
T1
Fig. 4.18 – Forma de onda para ângulo de disparo igual a 30°.
Para ângulos de disparo inferiores a 60° a condução de corrente é sempre contínua, pelo fato da
tensão na carga nunca assumir valor nulo. Já para ângulo de disparo superior a 60°, a tensão na
carga atinge valor nulo antes da ocorrência do próximo disparo, o que provoca condução
descontínua no caso de carga resistiva.
A Figura 4.19 mostra a forma de onda de tensão na saída para ângulo de disparo igual a 90°.
Pode se observar que, funcionando com carga indutiva, a tensão na saída nunca assume valores
negativos devido a presença dos diodos na parte inferior da ponte. Note que se α > 60o, existirá
um intervalo em que um SCR e um diodo de um mesmo "braço" do retificador conduzirão a
corrente, tornando a tensão na carga nula.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 48
VAN VBN VCN
T1αα = 90° α
Ig
VAB VAC VBC VBA VCAVCB VAB
30°
T1 T2 T3T3
D2 D3 D1 D2
T2 T3
T3
D3
T1
D1
T2
D2
Etapas em caso decarga indutiva
Fig. 4.19 – Forma de onda para ângulo de disparo igual a 90°.
Assim como ocorre na ponte mista monofásica, é usual o emprego de um diodo de roda-livre em
antiparalelo com a carga quando a mesma for indutiva. A sua finalidade é evitar a possibilidade de
não desligamento entre carga e fonte quando forem inibidos os pulsos de disparo. Pode ocorrer,
no caso de carga muito indutiva, de ultimo SCR a ser disparado permanecer conduzindo
mantendo etapas de condução indesejadas com os diodos inferiores da ponte. O uso do diodo de
roda-livre permite um caminho de livre circulação de corrente, o que evita a etapa de condução
entre o SCR e o diodo de um mesmo braço, assim se garante que o SCR será cortado e evita-se
o problema mencionado.
A tensão média na carga para uma ponte trifásica semicontrolada é dada pela expressão:
)cos1(17,1 __ α+⋅⋅= FASEDERMSMÉDIOLVV

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 49
4.7 - Sincronismo de Retificadores Trifásicos
Como já foi discutido em relação a retificadores trifásicos, os disparos dos SCR’s devem ser
sincronizados com a rede e atrasados de 30º.
Em circuitos de disparo para retificadores trifásicos, o sincronismo pode ser obtido utilizando
tensões de linha como referência, de modo a obter essa defasagem de 30°.
O uso do diagrama fasorial facilita a compreensão do sincronismo. Vejamos a Figura 4.20, na qual
estão representados os fasores das fases A, B e C e das tensões de linha Vac, Vba e Vcb,
considerando seqüência de fase ABC.
Fig. 4.20 – Diagrama fasorial e sincronismo.
Note que a tensão Vac está atrasada 30° em relação à fase A. Assim, quando Vac passar por 0°,
a fase A está avançada em 30°. Deste modo, podemos utilizar a tensão Vac como referência de
sincronismo para os SCRs ligados à fase A (T1 e T4).
Do mesmo modo, os disparos dos SCRs T2 e T5, que estão ligados à fase B, devem estar
sincronizados com a tensão Vba, a qual está atrasada 30° em relação à fase B.
E de forma semelhante os disparos de T3 e T6 devem ser sincronizados com Vcb, a qual está
atrasada 30° em relação à fase C.
ref.VA
VB
VC
w
-VC
-VB
-VA
VAC
30°VBA 30°
VCB
30°
SEQ. ABC

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 50
4.8 - Acionamento de Motores CC Com Retificadores
Com o aparecimento dos motores de indução e seu crescente uso em aplicações industriais, além
do barateamento e aprimoramento das técnicas de controle, a utilização de motores de indução é
cada vez mais atrativa. Entretanto, um número elevado de motores CC é ainda construído em
função de suas características, apropriadas para muitos acionamentos em velocidade variável.
Entre as vantagens no uso de motores CC citam-se: o elevado torque de partida, ideal para fins
de tração elétrica; o controle preciso de velocidade; maior simplicidade e menor custo dos
sistemas de controle em relação aos requeridos para motores de indução.
O tipo de acionamento a ser empregado depende de, entre outras coisas, potência requerida,
fonte disponível(1Φ ou 3Φ ), ondulação de corrente permitida no motor, se o sistema é reversível
ou não, e se há necessidade de regeneração.
De modo geral, os retificadores controlados monofásicos são restritos a potências menores que
2kW, acima deste valor o retificador trifásico é normalmente utilizado.
A Figura 4.21 mostra o esquema básico de controle de velocidade de um motor CC com excitação
independente.
Fig. 4.21 – Sistema básico de controle de velocidade de um motor CC.
Neste sistema é utilizado um retificador controlado (ou semicontrolado) para alimentar o circuito
de armadura, possibilitando variar a tensão e conseqüentemente a velocidade. O circuito de
campo é alimentado por um retificador não controlado.
A utilização de um retificador semicontrolado para alimentar o circuito de armadura, implica em
menor custo e maior simplicidade. Na maioria das vezes esta estrutura é a escolhida, atendendo a
necessidade do sistema.
RetificadorControlado
A B C
MCCRetificador
nãoControlado
A B C
Circuito deDisparo
Ajuste deVelocidade
Va
Ia
Vf
If
Lfiltro
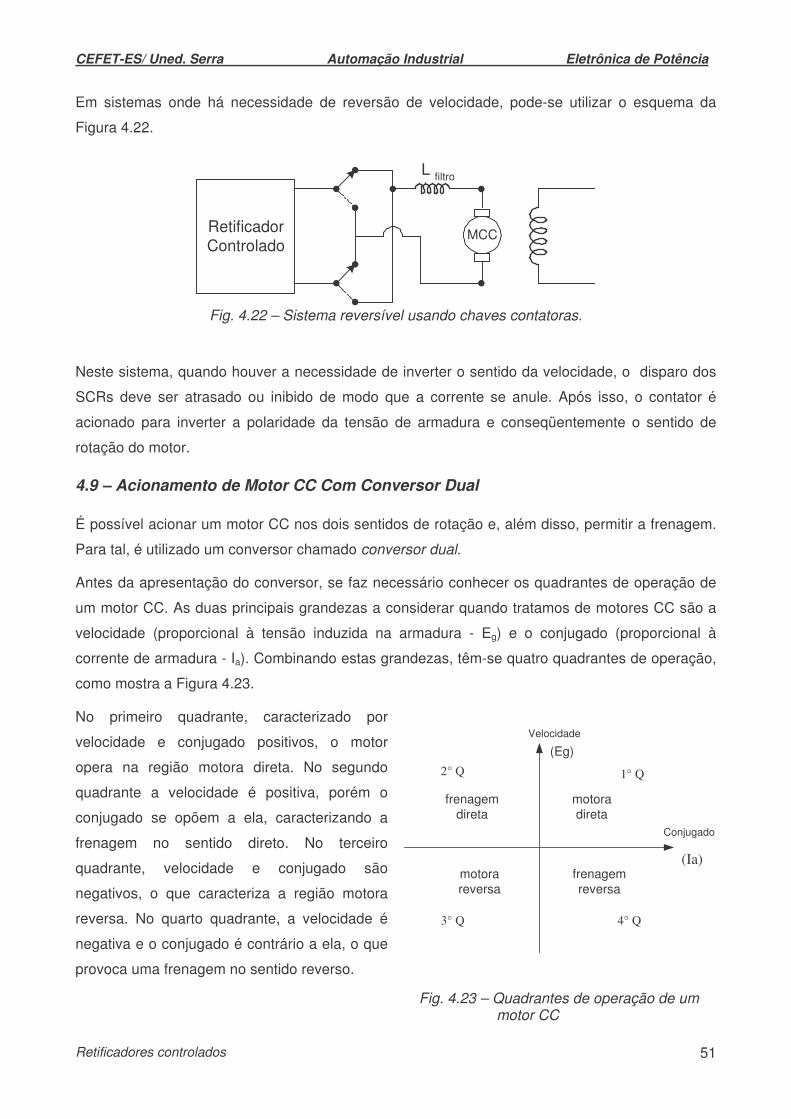
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 51
Em sistemas onde há necessidade de reversão de velocidade, pode-se utilizar o esquema da
Figura 4.22.
Fig. 4.22 – Sistema reversível usando chaves contatoras.
Neste sistema, quando houver a necessidade de inverter o sentido da velocidade, o disparo dos
SCRs deve ser atrasado ou inibido de modo que a corrente se anule. Após isso, o contator é
acionado para inverter a polaridade da tensão de armadura e conseqüentemente o sentido de
rotação do motor.
4.9 – Acionamento de Motor CC Com Conversor Dual
É possível acionar um motor CC nos dois sentidos de rotação e, além disso, permitir a frenagem.
Para tal, é utilizado um conversor chamado conversor dual.
Antes da apresentação do conversor, se faz necessário conhecer os quadrantes de operação de
um motor CC. As duas principais grandezas a considerar quando tratamos de motores CC são a
velocidade (proporcional à tensão induzida na armadura - Eg) e o conjugado (proporcional à
corrente de armadura - Ia). Combinando estas grandezas, têm-se quatro quadrantes de operação,
como mostra a Figura 4.23.
No primeiro quadrante, caracterizado por
velocidade e conjugado positivos, o motor
opera na região motora direta. No segundo
quadrante a velocidade é positiva, porém o
conjugado se opõem a ela, caracterizando a
frenagem no sentido direto. No terceiro
quadrante, velocidade e conjugado são
negativos, o que caracteriza a região motora
reversa. No quarto quadrante, a velocidade é
negativa e o conjugado é contrário a ela, o que
provoca uma frenagem no sentido reverso.
Fig. 4.23 – Quadrantes de operação de um motor CC
RetificadorControlado
MCC
L filtro
1° Q
4° Q3° Q
2° Q
Velocidade
Conjugado
(Eg)
(Ia)
motoradireta
frenagemdireta
motorareversa
frenagemreversa

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 52
Sabe-se que um retificador totalmente controlado quando alimentam cargas indutivas apresentam
tensão instantaneamente negativa na saída. Considere a operação da ponte completa monofásica
no modo de condução contínuo. Assim, a corrente de carga não se anula antes da ocorrência do
próximo disparo. Deste modo, sempre um par de tiristores estará conduzindo (T1 e T4 no
semiciclo positivo; T2 e T3 no semiciclo negativo). Como estamos tratando do acionamento de
motor CC, o mesmo será representado como uma carga RLE.
Se o ângulo de disparo for menor que 90°, a tensão média na saída será positiva. Nesta situação,
o motor está recebendo energia proveniente da fonte.
Agora considere que o ângulo de disparo é maior que 90°, como mostra a Figura 4.24. Neste
caso, a tensão média na saída da ponte será negativa. Sendo assim, o motor fornece energia
para a fonte. Como o fluxo de potência vai da carga (CC) para a fonte (CA), a ponte opera como
inversor.
Fig. 4.24 – Ponte monofásica com carga RLE operando como Inversor: 90° < α < 180°.
Na operação da ponte como inversor, o motor está na região de frenagem transferindo a energia
cinética do eixo para a fonte CA. Este tipo de frenagem é chamada frenagem regenerativa.
A partir do exposto percebe-se que a ponte completa permite a operação em dois quadrantes.
Quando a ponte funciona como retificador (α < 90°), o motor está na região motora direta, ou seja
no 1° quadrante (tensão e corrente positivas).
Na operação da ponte como inversor (α > 180°), o motor opera no 4° quadrante (tensão negativa e
corrente positiva), ocorrendo uma frenagem reversa. Note que a polaridade da tensão EG é
negativa, simbolizando que o motor está girando no sentido reverso.
O Conversores Dual, como mostrado na Figura 4.25, é originado pela associação em antiparalelo
de dois retificadores totalmente controlados. Estes retificadores podem ser trifásicos ou a ponte
monofásica.
T1 T2
T4T3
vs
+
- Ra
Lfiltro
EG
IL
+
_
_
+
VL
VL MÉDIO
t
αd
VL VL
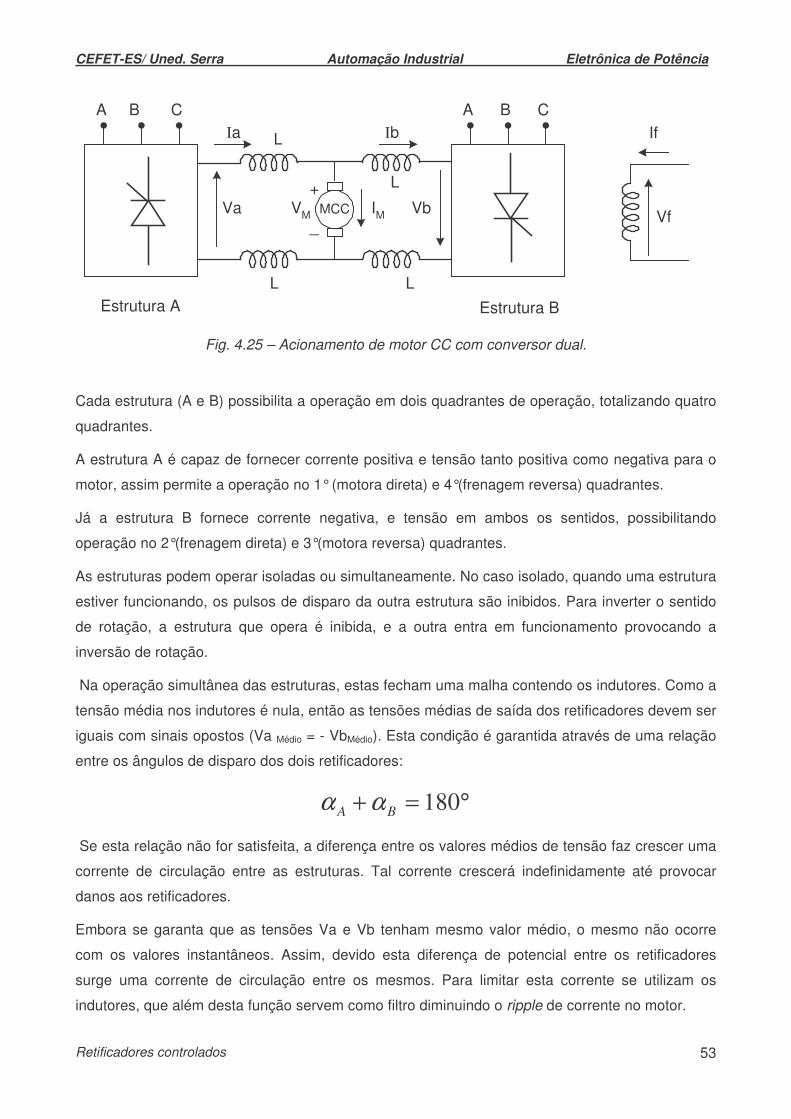
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 53
MCCVa
Ia A B C A B C
Estrutura A Estrutura B
L
LL
L
Vb
Ib
Vf
If
VM
+
_IM
Fig. 4.25 – Acionamento de motor CC com conversor dual.
Cada estrutura (A e B) possibilita a operação em dois quadrantes de operação, totalizando quatro
quadrantes.
A estrutura A é capaz de fornecer corrente positiva e tensão tanto positiva como negativa para o
motor, assim permite a operação no 1° (motora direta) e 4°(frenagem reversa) quadrantes.
Já a estrutura B fornece corrente negativa, e tensão em ambos os sentidos, possibilitando
operação no 2°(frenagem direta) e 3°(motora reversa) quadrantes.
As estruturas podem operar isoladas ou simultaneamente. No caso isolado, quando uma estrutura
estiver funcionando, os pulsos de disparo da outra estrutura são inibidos. Para inverter o sentido
de rotação, a estrutura que opera é inibida, e a outra entra em funcionamento provocando a
inversão de rotação.
Na operação simultânea das estruturas, estas fecham uma malha contendo os indutores. Como a
tensão média nos indutores é nula, então as tensões médias de saída dos retificadores devem ser
iguais com sinais opostos (Va Médio = - VbMédio). Esta condição é garantida através de uma relação
entre os ângulos de disparo dos dois retificadores:
°=+ 180BA αα
Se esta relação não for satisfeita, a diferença entre os valores médios de tensão faz crescer uma
corrente de circulação entre as estruturas. Tal corrente crescerá indefinidamente até provocar
danos aos retificadores.
Embora se garanta que as tensões Va e Vb tenham mesmo valor médio, o mesmo não ocorre
com os valores instantâneos. Assim, devido esta diferença de potencial entre os retificadores
surge uma corrente de circulação entre os mesmos. Para limitar esta corrente se utilizam os
indutores, que além desta função servem como filtro diminuindo o ripple de corrente no motor.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Retificadores controlados 54
Quando o motor funciona na região motora direta, a estrutura A opera como retificador fornecendo
energia para o motor. Então se têm que:
αA < 90° e αB > 90°
Nesta situação, a estrutura A fornece tensão e corrente positivas para o motor (VM > 0, IM > 0). Já
a estrutura B não processa energia.
Com a elevação do ângulo de disparo αA (e diminuição de αB )ocorre uma redução de velocidade
através de uma frenagem direta, situação em que a estrutura B opera como inversor, transferindo
energia do motor para a rede CA (regeneração). Neste caso, a estrutura B fornece tensão positiva
e corrente negativa para o motor (VM > 0, IM < 0), e a estrutura A não processa energia.
Para funcionamento na região motora reversa, têm se que a estrutura B opera como retificador
fornecendo energia para o motor. Daí:
αB < 90° e αA > 90°
Nesta situação, a estrutura B fornece tensão e corrente negativas para o motor (VM < 0, IM < 0), e
a estrutura A não processa energia.
Para reduzir a velocidade, provocando uma frenagem reversa deve-se elevar o ângulo de disparo
αB (e diminuir αA ), deste modo a estrutura A opera como inversor, transferindo energia do motor
para a rede CA (regeneração). Nesta situação, a estrutura A fornece tensão negativa e corrente
positiva para o motor (VM < 0, IM > 0), e a estrutura B não processa energia.
A partir do que foi apresentado, conclui-se que o conversor dual permite a variação de velocidade,
reversão e frenagem regenerativa.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 55
5. CIRCUITOS DE DISPARO
5.1 – Introdução
Como foi discutido no Capítulo 2, o método mais usual para levar um SCR do corte à condução é
aplicar uma corrente do terminal gate para o terminal catodo. O fabricante do componente
apresenta várias especificações de disparo, entre elas: corrente de gatilho, tensão de gatilho e
tempo de disparo. Assim, o circuito de disparo deve:
Considerar as variações das características do componente dentro dos limites
estabelecidos pelo fabricante;
Não exceder as especificações de tensão, corrente e potência de gatilho;
Assegurar que o disparo não ocorra quando não desejado, através de sinais ruidosos.
Assegurar que o disparo ocorrerá quando desejado.
Permitir variação do ângulo de disparo.
O disparo pode ser feito com a aplicação de corrente contínua entre gate e catodo, entretanto esta
alternativa provoca um aquecimento do componente devido à potência dissipada na junção gate-
catodo. Assim, maiores cuidados devem ser tomados no projeto considerando a especificação da
máxima potência de gatilho.
Uma forma de reduzir a potência dissipada no gatilho é o disparo por pulsos, além de possibilitar a
isolação entre o circuito de disparo e o dispositivo. A isolação elétrica, obtida por transformadores
de pulso ou acopladores óticos, permite que uma única fonte de sinal forneça os pulsos
necessários para o disparo de vários tiristores.
5.2 - Circuito de Disparo Com Sinais CA
Os circuitos mais simples utilizam a própria fonte CA para produzir os disparos dos tiristores.
A figura 5.1a apresenta um circuito aplicado no controle de potência na carga usando o SCR. O
ângulo de disparo é ajustado através do potenciômetro. Este circuito permite o controle do ângulo
de disparo somente até 90°, assim, o controle de tensão na carga não é completo.
Uma maneira de resolver este problema é mostrada na figura 5.1b. A idéia é atrasar a tensão que
irá comandar o disparo do tiristor. Desta forma, a tensão de disparo irá ocorrer mais tarde no
semiciclo positivo.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 56
(a) (b)
Fig. 5.1 – Circuitos de disparo de SCR usando a rede CA.
Da mesma forma, o ângulo de disparo é variado através do potenciômetro. O diodo D1 garante
que só haverá corrente de gatilho no semiciclo positivo da tensão da rede, evitando perdas
desnecessárias no gatilho do SCR quando este estiver bloqueado. O diodo D2 conduz no
semiciclo negativo carregando o capacitor C1 com tensão negativa. Isso garante que, em cada
semiciclo positivo, o capacitor comece sempre a se carregar a partir de uma tensão fixa,
mantendo a regularidade do disparo.
O TRIAC também pode ser utilizado para
variação de potência na carga. A única
diferença é que neste caso, a condução de
corrente ocorre em ambos sentidos, ou seja,
o controle de fase pode ser feito nos
semiciclos positivo e negativo.
Quando o TRIAC é usado, é
freqüentemente utilizado o DIAC como
dispositivo de disparo, conforme pode ser
visto na Figura 5.2.
O circuito funciona da seguinte maneira: o capacitor carrega-se até atingir a tensão Vdiac de
disparo do DIAC. Quando isso ocorre, o DIAC entra em condução e cria um caminho de baixa
impedância para o capacitor descarregar-se sobre o gatilho do TRIAC. O ângulo de disparo é
ajustado através do potenciômetro.
5.3 - Circuito de Disparo Com Pulsos Usando o UJT
Como já foi dito, o disparo por pulsos evita o aquecimento do componente provocado por disparo
com sinais CC, e possibilita a isolação elétrica entre o circuito de disparo e o circuito de potência
por meio de transformadores de pulso.
carga
SCR
D
R1
PotVCA
carga
SCR
D1C
R1
PotVCA
D2
carga
Triac
diacC
R1
PotVCA
Fig. 5.2 – Circuitos de variação de potência com TRIAC.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 57
O Transistor de Unijunção (UJT)
O UJT é um dispositivo semicondutor de três terminais como mostra a Figura 5.3.
B2
B1
E
B2
B1
E
rB2
rB1
(a) (b)
+
_
Vbb
Ve
Vx
Fig. 5.3 – Transistor de Unijunção – UJT: (a) Símbolo – (b) Circuito equivalente com polarização.
Os terminais são: base 1 (B1), base 2 (B2) e emissor (E). O circuito equivalente do UJT apresenta
um diodo, que representa a junção PN do emissor. Entre os terminais B2 e B1 existe uma barra de
material N que pode ser dividida em duas partes: a primeira parte, rB2, equivale à resistência da
parte superior da barra e a segunda, rB1, a resistência da parte inferior.
Considerando o circuito equivalente, pode-se concluir que sem polarização de emissor o
dispositivo funciona como um divisor resistivo, por onde circula uma corrente da ordem de
miliampères. De onde se obtém:
Vbbrr
rV
BB
BX ⋅
+=
21
1
Onde a relação rB1/(rB1 + rB2) é denominada relação intrínseca η, a qual depende apenas dos
parâmetros internos do dispositivo (Para o UJT 2N2646, η é da ordem de 0.6). Assim pode-se
escrever:
VbbVX ⋅= η
Com polarização de emissor, enquanto a tensão Ve for menor que Vd + Vx, o diodo do emissor
está cortado. Quando a tensão Ve for superior que Vd + Vx, o diodo de emissor fica diretamente
polarizado permitindo circulação de corrente entre o emissor e base 1. Isso faz com que a
resistência rB1 diminua de seu valor máximo (da ordem de 5kΩ), para 50Ω aproximadamente.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 58
Esse comportamento permite o controle de carga e descarga de um capacitor ligado no emissor,
cuja descarga será utilizada para disparar SCRs e TRIACs.
Se desprezarmos a queda de tensão no diodo, a equação característica do UJT é:
VbbVE ⋅=η
Oscilador de Relaxação com UJT
A figura 5.4 mostra um circuito tradicional de disparo usando UJT, que consiste em um oscilador
de relaxação.
Fig. 5.4 – Oscilador de relaxação com UJT e formas de onda.
Na prática, utiliza-se R2 << rB2 , fazendo com que a queda de tensão em R2 seja desprezível. O
mesmo ocorre com R1 e rB1.
Considerando o capacitor inicialmente descarregado, este impõe Ve menor que ηVbb. Com o
passar do tempo, o capacitor vai se carregando através de Rt, elevando o potencial Ve até atingir
ηVbb. Isso provoca o início da condução do emissor, conseqüentemente diminuindo o valor de rB1,
descarregando rapidamente o capacitor Ct, fornecendo um pulso de tensão no ponto Vb1. Com a
descarga do capacitor, o potencial de Ve é reduzido até provocar novamente o corte do UJT,
reiniciando o ciclo.
O resistor R1 é o responsável pela coleta do pulso dado pela descarga do capacitor Ct, assumindo
um valor na ordem de dezenas ou centenas de ohm.
O resistor R2 melhora a estabilidade térmica do UJT, tipicamente com valores na ordem de
centenas de ohm.
R2
Rt
R1
Ct
UJT
Vbb
Ve
VB1
B2
B1E
η .Vbb
Ve
t
Vb1
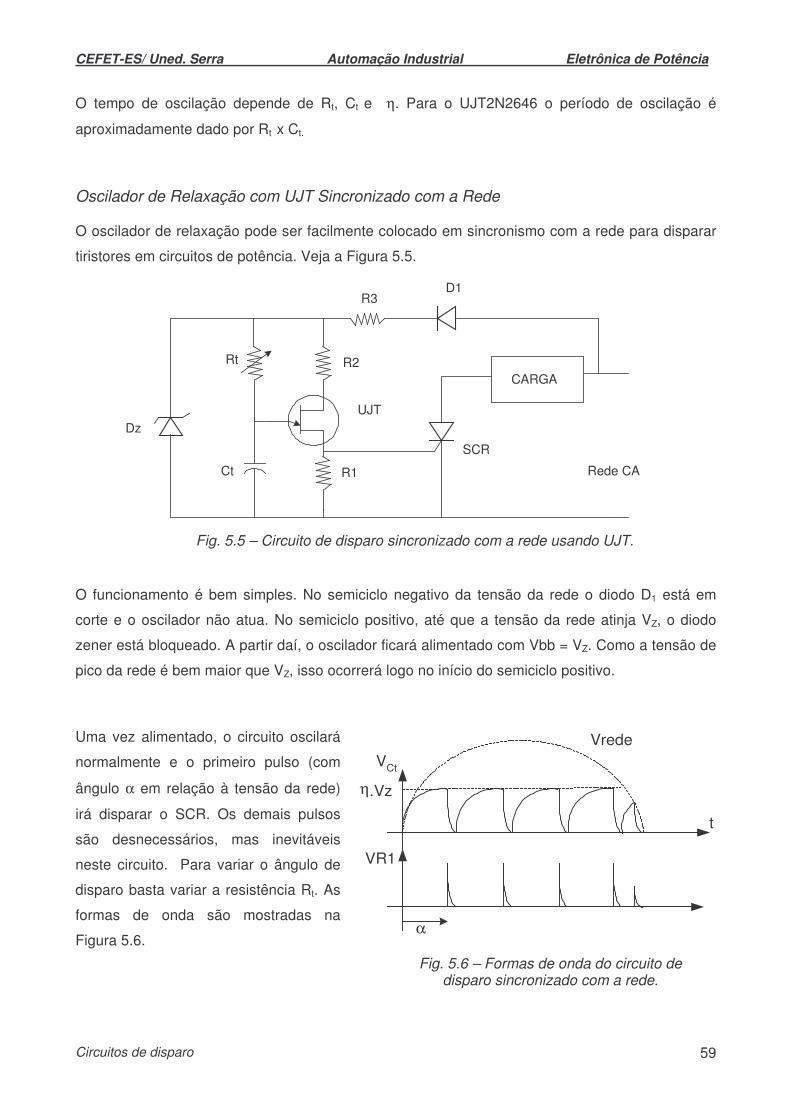
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 59
O tempo de oscilação depende de Rt, Ct e η. Para o UJT2N2646 o período de oscilação é
aproximadamente dado por Rt x Ct.
Oscilador de Relaxação com UJT Sincronizado com a Rede
O oscilador de relaxação pode ser facilmente colocado em sincronismo com a rede para disparar
tiristores em circuitos de potência. Veja a Figura 5.5.
D1R3
R2Rt
R1
Dz
Ct Rede CA
SCR
UJT
CARGA
Fig. 5.5 – Circuito de disparo sincronizado com a rede usando UJT.
O funcionamento é bem simples. No semiciclo negativo da tensão da rede o diodo D1 está em
corte e o oscilador não atua. No semiciclo positivo, até que a tensão da rede atinja VZ, o diodo
zener está bloqueado. A partir daí, o oscilador ficará alimentado com Vbb = VZ. Como a tensão de
pico da rede é bem maior que VZ, isso ocorrerá logo no início do semiciclo positivo.
Uma vez alimentado, o circuito oscilará
normalmente e o primeiro pulso (com
ângulo α em relação à tensão da rede)
irá disparar o SCR. Os demais pulsos
são desnecessários, mas inevitáveis
neste circuito. Para variar o ângulo de
disparo basta variar a resistência Rt. As
formas de onda são mostradas na
Figura 5.6.
Fig. 5.6 – Formas de onda do circuito de disparo sincronizado com a rede.
η.Vz
VCt
t
VR1
α
Vrede

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 60
5.4 – Isolação de Circuitos de Disparo
Os SCRs e TRIACs são dispositivos para controle de potência, que operam com tensões e
correntes elevadas, quando comparadas com os circuitos de sinal (circuitos analógicos e digitais).
Para que os circuitos de sinal, utilizados em circuitos de disparo, não sejam afetados pelas
tensões e correntes dos circuitos de potência, é necessário isolá-los galvanicamente.
Transformadores de Pulso
Os transformadores de pulso transmitem pulsos de disparo
aos SCR’s e TRIAC’s. A duração necessária do pulso de
disparo depende do tipo de carga. Por exemplo, para carga
indutiva, deve-se manter o pulso aplicado por um intervalo
de tempo razoável, garantindo que o SCR esteja em
condução no instante em que o pulso seja retirado. Isso
resulta em pulsos largos, que tendem a saturar o núcleo do
transformador de pulso. Para evitar esta saturação, são
utilizados pulsos em alta freqüência. O pulso largo é
transformado em um trem de pulsos de alta freqüência, de
acordo com a figura 5.8. A obtenção do trem de pulsos a
partir do sinal de disparo pode ser feita utilizando um
oscilador de relaxação. Uma outra possibilidade é combinar
o sinal de disparo com um sinal em alta freqüência, obtido
por um oscilador (usando o CI555 por exemplo).
Acopladores Ópticos
Outro modo de obter isolação dos pulsos de
disparo é através de acopladores ópticos.
Basicamente, um acoplador óptico é constituído
de um LED infravermelho e um fotodetector, que
pode ser um transistor, um SCR, ou um TRIAC.
O circuito da Figura 5.9 mostra como é possível
acionar um TRIAC utilizando um acoplador óptico
o qual utiliza um Triac como fotodetector. O
acoplador utilizado é o MOC3011 da Motorola.
t
t
Sinal de disparo
Trem de pulsos
Fig. 5.8 – Trem de pulsos de alta freqüência.
Fig. 5.7 – Transformador de pulso.
R1
A
K
G
Transformadorde Pulso
+
_V
PULSO
Fig. 5.9 – Circuito de disparo com acoplador óptico.
R2
Acoplador Óptico
carga
R1
Vcomando
+
_
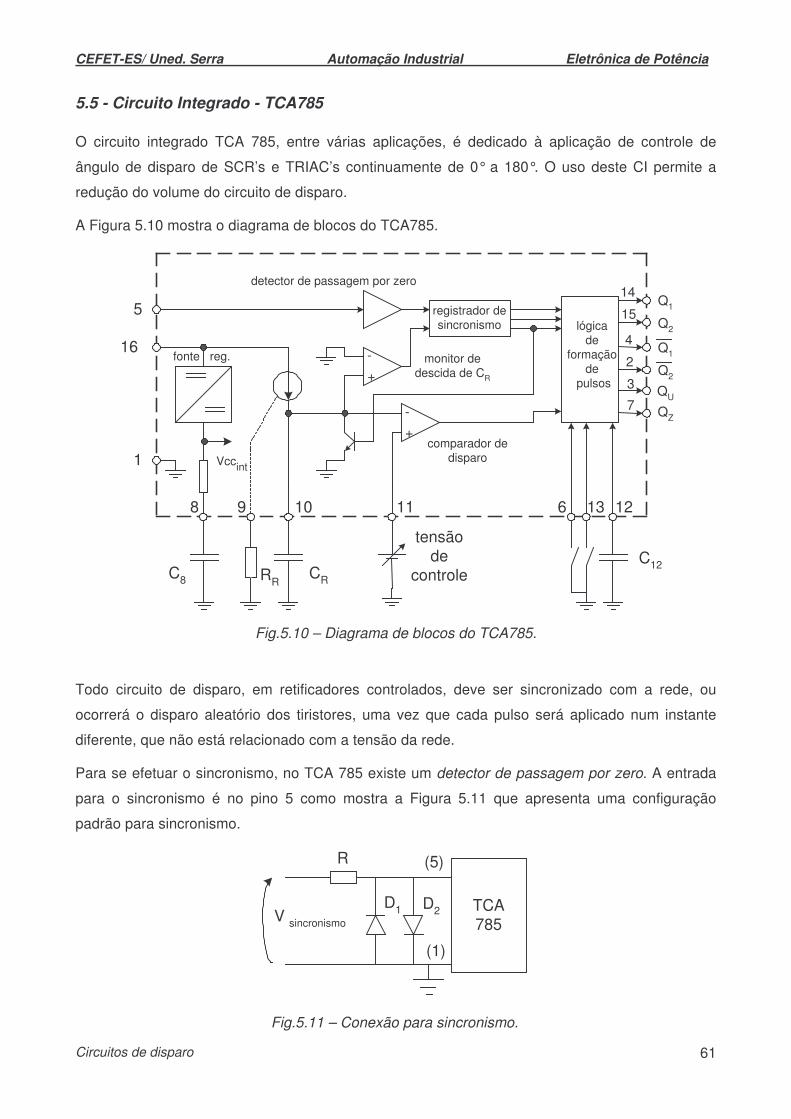
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 61
5.5 - Circuito Integrado - TCA785
O circuito integrado TCA 785, entre várias aplicações, é dedicado à aplicação de controle de
ângulo de disparo de SCR’s e TRIAC’s continuamente de 0° a 180°. O uso deste CI permite a
redução do volume do circuito de disparo.
A Figura 5.10 mostra o diagrama de blocos do TCA785.
registrador desincronismo
-
+
-
+
lógicade
formaçãode
pulsos
detector de passagem por zero
comparador dedisparo
monitor dedescida de CR
fonte reg.
Vccint1
16
5
8 9 10 11 6 13 12
14
15
4
2
3
7
Q1
Q2
Q1
Q2
QU
QZ
C12CRC8 RR
tensãode
controle
Fig.5.10 – Diagrama de blocos do TCA785.
Todo circuito de disparo, em retificadores controlados, deve ser sincronizado com a rede, ou
ocorrerá o disparo aleatório dos tiristores, uma vez que cada pulso será aplicado num instante
diferente, que não está relacionado com a tensão da rede.
Para se efetuar o sincronismo, no TCA 785 existe um detector de passagem por zero. A entrada
para o sincronismo é no pino 5 como mostra a Figura 5.11 que apresenta uma configuração
padrão para sincronismo.
TCA785V sincronismo
R
D1 D2
(1)
(5)
Fig.5.11 – Conexão para sincronismo.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 62
A filosofia de sincronismo é um gerador de rampa, cuja característica é ajustada por RR e CR, nos
pinos 9 e 10, respectivamente.
O gerador de rampa fornece uma tensão que varia linearmente com o tempo (reta). Isso é obtido
através da carga do capacitor CR com uma corrente constante, a qual é ajustada por RR. O
capacitor se carrega até que, no próximo cruzamento por zero, o detector de passagem por zero,
informe o evento ao registrador de sincronismo. O registrador gera um pulso de sincronismo que
satura o transistor e conseqüentemente, o capacitor se descarrega rapidamente. Após a completa
descarga do capacitor, a próxima rampa se inicia. O resultado é um sinal com forma de onda
“dente de serra” sincronizado com a rede.
A tensão da rampa é comparada com a tensão de
controle, no pino 11 do TCA785. Quando estas
tensões se igualarem, a saída do comparador de
disparo muda de estado indicando ao bloco de
formação de pulsos que um pulso de disparo deve
ser gerado. A figura 5.12 mostra este mecanismo.
As principais saídas do TCA785 são Q1(pino 14) e
Q2(pino 15). Q1 produz disparo no semiciclo
negativo e Q2 no semiciclo positivo da tensão de
sincronismo. A duração dos pulsos depende do
valor da capacitância C12, conectada no pino 12.
Com o pino aberto, a duração é curta(30µs). E se o
pino 12 estiver aterrado a duração é longa
(estendendo-se até o fim do semiciclo, ou seja, a
duração vale 180° - α).
O TCA possui outras saídas, como as saídas ___
1Q (pino 4) e ___
2Q (pino 2) que são complementares
em relação às saídas Q1 e Q2, respectivamente. O
aterramento do pino 13 resulta em pulsos de longa
duração nas saídas ___
1Q e ___
2Q . Além destas,
existem duas saídas auxiliares. A saída QU é
similar à saída Q1, entretanto a duração do pulso é
fixa valendo 180°. A saída QZ, é igual a uma
associação lógica NOR das saídas Q1 e Q2, sendo
útil no disparo de TRIAC’s.
Vs
VCRVcontrole
t
t
α α
comparador de disparo
Fig. 5.12 – Comparador de disparo.
Vs
VCRVcontrole
t
t
α
Q2
Q1
α
pino 12 aterrado
t
t
t
QZ
Fig.5.13 Formas de onda do TCA 785

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Circuitos de disparo 63
Uma opção importante no TCA785 é a possibilidade de bloqueio das saídas que é feito através do
pino 6. Se o pino 6 estiver em nível alto, as saídas estão liberadas; e se estiver em nível baixo,
estará garantido o bloqueio dos pulsos.
Alguns dados técnicos do TCA 785:
Tensão de alimentação: 8 a 18V (pino 16); o TCA possui um regulador interno para
alimentação dos circuitos internos. A tensão é Vccint = 3,1V, que está disponível no pino 8.
Freqüência de trabalho: 10 a 500Hz;
Corrente máxima dos pulsos de saída: 60mA;
Tensão de saída: 2 a 3 V menor que a tensão de alimentação;
Corrente de carga do capacitor CR: (10uA – 1mA); Esta corrente é ajustada por R9, tal que:
9
int1,1RVcc
ICR
⋅=
A tensão da rampa VCR está limitada a 2V abaixo da tensão de alimentação, dada por:
tCI
VR
CRCR ⋅=
Os valores máximo e mínimo do capacitor CR são 1uF e 500pF.
A Figura 5.14 apresenta uma aplicação do TCA785, onde se pode variar a velocidade de um
motor universal. Através de um potenciômetro varia-se o ângulo de disparo do Triac, e
conseqüentemente a tensão aplicada ao motor. Este circuito de disparo é totalmente isolado já
que se utiliza transformador para o sincronismo e também para a aplicação dos pulsos, os quais
são obtidos usando um CI555.
Fig.5.14 – Exemplo de aplicação do TCA 785.
1
+ Vcc
16 13 6
12
11
TCA 785
Vs
5 9 10
14
15
555
+ Vcc
Vs
ωMca3
7
62
8 4
+ Vcc
1
5RR CR
D1 D2
D3
D4
C1
R1
R2 R3
pot
R4
R5 R6
R7
C2
C3
R8
D5
D6
D7 R9
R10
T1
T2
Q1
Q2
triac

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Controladores CA 64
6. CONTROLADORES CA
Em algumas aplicações, alimentadas em corrente alternada, nas quais deseja-se alterar o valor da
tensão e da corrente eficaz da carga, é comum o emprego dos chamados Controladores CA,
também designados como Variadores de Tensão, Gradadores ou Contatores Estáticos.
Como aplicações típicas pode-se citar, dentre outras:
aquecimento (controle de temperatura);
reguladores de tensão;
controle de intensidade luminosa em lâmpadas incandescentes;
acionamento de motores CA;
partida suave de motores de indução (soft-starter);
compensação de reativos em sistemas de potência.
Os dispositivos semicondutores de potência empregados em tais conversores são tipicamente os
tiristores, uma vez que se pode contar com a ocorrência de comutação natural pela rede. Em
aplicações de baixa potência pode-se fazer uso de TRIAC’s, enquanto para potência mais elevada
utilizam-se 2 SCR’s em antiparalelo.
Fig. 6.1 – Controlador CA usando Triac ou SCR.
Dois tipos de controle são normalmente empregados: o controle liga-desliga e o controle de fase.
6.1 – Controle Liga-Desliga
Este tipo de controle é usado em situações em que a constante de tempo da carga é muito grande
em relação ao período da rede CA, como em sistemas de aquecimento.
O controle consiste simplesmente em ligar e desligar a alimentação da carga (em geral uma
resistência). O intervalo de condução e também o de bloqueio do interruptor é tipicamente de
muitos ciclos da rede. Este tipo de controle também é chamado de controle por ciclos inteiros.
carg
a
carg
a

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Controladores CA 65
Fig. 6.2 – Tensão na carga com controle liga-desliga.
A tensão eficaz na carga, e conseqüentemente a potência média, podem ser variadas através do
tempo em que a carga é alimentada (ton) e do tempo em que a carga é desligada(toff). A Potência
média é dada pela relação:
OFFON
ONON
tttP
P+⋅
=
Onde PON é a potência na carga durante o intervalo em que está alimentada.
6.2 - Controle de fase
No chamado Controle de Fase, em um dado semiciclo da rede, o tiristor é disparado em um
determinado instante, fazendo com que a carga esteja conectada à entrada por um intervalo de
tempo menor ou igual a um semiciclo. Variando-se o ângulo de disparo é possível variar o valor
eficaz da tensão de saída.
6.2.1- Controlador Monofásico
O controlador monofásico bem como as
formas de onda são apresentadas pela Figura
6.3.
No semiciclo positivo da fonte o pulso de
disparo é aplicado em T1, e no semiciclo
negativo T2 é disparado. Assim, pode-se variar
o valor eficaz da tensão na carga de zero até o
valor eficaz da fonte.
iL
R VL
+
-VS
+
_
T1
T2
αd αd
αd
t
VS
0° π π°≡ 02
t
VL
T1T2
T1
Fig. 6.3 – Controlador CA monofásico e formas de onda.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Controladores CA 66
6.2.2 - Controlador Trifásico
Quando a carga é trifásica, como um motor de indução por exemplo, é necessário um controlador
CA trifásico. A Figura 6.4 mostra duas possíveis possibilidades para o controlador, em (a) a
ligação da carga é em estrela, e em (b) a carga é ligada em triângulo.
O controlador trifásico pode ser analisado como três controladores monofásicos. Assim, variando
o ângulo de disparo dos seis SCRs é possível variar a tensão eficaz na carga.
(a) (b)
Fig. 6.4 – Controladores CA trifásicos.
6.3 – Soft-Start
O motor de indução trifásico é o motor mais utilizado industrialmente, o que proporcionou a
necessidade de desenvolvimento de dispositivos para o seu acionamento. Sabe-se que na
partida, o motor de indução apresenta corrente muitas vezes superior ao valor nominal.
Dependendo do nível de potência, é necessária a utilização de um método de partida para reduzir
a corrente.
São vários os métodos empregados, todos com uma filosofia em comum: reduzir a tensão
aplicada na partida. Exemplos: partida estrela-triângulo, auto-transformador, reostato de partida.
Um controlador CA pode ser utilizado na partida de um motor indução, proporcionando redução da
corrente de partida. O equipamento comercialmente recebe o nome de soft-starter, e basicamente
é composto por um controlador CA trifásico.
Na partida o ângulo de disparo é 180° e, gradativamente, é diminuído fazendo com que a tensão
aplicada ao motor se eleve aos poucos até que, em alguns segundos ou fração, a tensão aplicada
ao motor apresente valor nominal (ângulo de disparo igual a zero).
Além da vantagem do controle da tensão (corrente) durante a partida, a chave eletrônica
apresenta, também, a vantagem de não possuir partes móveis ou que gerem arco, como nas
chaves mecânicas. Este é um dos pontos fortes das chaves eletrônicas, pois sua vida útil torna-se
mais longa.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Controladores CA 67
A Figura 6.5 mostra como evolui a tensão aplicada ao motor durante a partida.
α α α
Tensão
t
Fig. 6.5 – Tensão aplicada ao motor durante a partida.
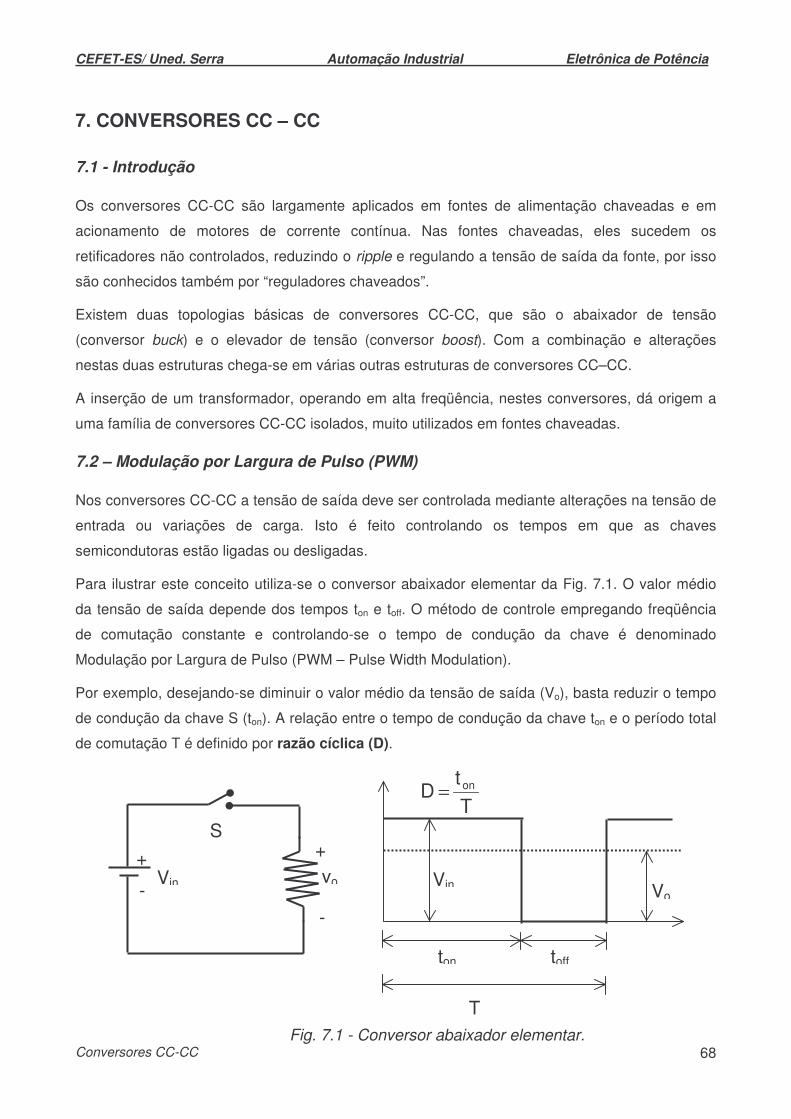
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 68
7. CONVERSORES CC – CC
7.1 - Introdução
Os conversores CC-CC são largamente aplicados em fontes de alimentação chaveadas e em
acionamento de motores de corrente contínua. Nas fontes chaveadas, eles sucedem os
retificadores não controlados, reduzindo o ripple e regulando a tensão de saída da fonte, por isso
são conhecidos também por “reguladores chaveados”.
Existem duas topologias básicas de conversores CC-CC, que são o abaixador de tensão
(conversor buck) e o elevador de tensão (conversor boost). Com a combinação e alterações
nestas duas estruturas chega-se em várias outras estruturas de conversores CC–CC.
A inserção de um transformador, operando em alta freqüência, nestes conversores, dá origem a
uma família de conversores CC-CC isolados, muito utilizados em fontes chaveadas.
7.2 – Modulação por Largura de Pulso (PWM)
Nos conversores CC-CC a tensão de saída deve ser controlada mediante alterações na tensão de
entrada ou variações de carga. Isto é feito controlando os tempos em que as chaves
semicondutoras estão ligadas ou desligadas.
Para ilustrar este conceito utiliza-se o conversor abaixador elementar da Fig. 7.1. O valor médio
da tensão de saída depende dos tempos ton e toff. O método de controle empregando freqüência
de comutação constante e controlando-se o tempo de condução da chave é denominado
Modulação por Largura de Pulso (PWM – Pulse Width Modulation).
Por exemplo, desejando-se diminuir o valor médio da tensão de saída (Vo), basta reduzir o tempo
de condução da chave S (ton). A relação entre o tempo de condução da chave ton e o período total
de comutação T é definido por razão cíclica (D).
Tt
D on=
T
ton toff
Vin Vo Vin vo
+
-
+
-
S
Fig. 7.1 - Conversor abaixador elementar.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 69
A Fig. 7.2 mostra o método PWM, onde os sinais que controlam os estados das chaves são
gerados a partir da comparação entre uma tensão de controle e uma forma de onda periódica
(dente de serra). A freqüência da onda dente de serra define a freqüência de comutação da chave
S.
A tensão de controle varia lentamente quando comparada com a onda dente de serra, podendo
ser considerada constante a cada período de comutação. Enquanto esta tensão de controle for
maior que a onda dente de serra, o sinal que comanda a chave fica em nível “alto”, mantendo a
chave em condução, caso contrário a chave abre.
7.3 - Conversor Abaixador (BUCK)
A maneira elementar de se representar um conversor Buck está mostrada na Fig. 7.3. A chave S
pode assumir as posições A e B. Na posição A, a tensão de entrada é aplicada sobre a carga e na
posição B a tensão na carga é zero. Desta forma, a tensão média de saída (VO) é menor que a
tensão de entrada, podendo ser controlada pelo tempo de permanência da chave na posição A.
Fig. 5.2 - Modulação por largura de pulso
Vcontrole
Dente de serra
Sinal de comandoda chave
Comparador
Vcontrole
Dente de serra
Sinal de comandoda chave
ON ON
OFFOFF
Vcontrole > Vdente de serra
Vcontrole < Vdente de serraT
ton toff
Fig. 7.2 – Modulação por largura de pulso.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 70
Fig. 7.3 - Conversor Buck simplificado
A equação abaixo define o valor da tensão média de saída em função da razão cíclica e da tensão
de entrada:
A forma de onda da tensão de saída apresenta uma componente contínua Vo e uma componente
alternada, conforme mostra a decomposição da Fig. 7.4 abaixo.
Fig. 7.4 - Componentes da forma de onda de saída do conversor Buck
Para reduzir a componente alternada na carga, o circuito original será modificado, introduzindo-se
os filtros.
Na Fig. 7.5. foi adicionando um indutor L em série com a carga, reduzindo-se o ripple de corrente
na mesma e conseqüentemente o ripple da tensão de saída. Com a chave na posição A, a
corrente no indutor cresce, armazenando energia no mesmo. Quando a chave está na posição B,
ton toff
Vin vo +
-
+
-
S
B
A
Vin Vo
Pos. Pos. Pos.
T
Vin Vo Vo
Vin
Componente CC Componente CA
A
A
ino VDV ×=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 71
o indutor atua como fonte transferindo a energia armazenada anteriormente para a carga,
decrescendo sua corrente.
Quanto maior o valor da indutância menor será o ripple de corrente. Da mesma forma como
tratado no capítulo de retificadores, a condução de corrente poderá ser contínua ou descontínua.
Fig. 7.5 - Filtro indutivo em um conversor Buck simplificado.
O próximo passo para melhorar o conversor buck é adicionar um capacitor em paralelo com a
carga como mostra a Fig. 7.6, reduzindo ainda mais o ripple de tensão sobre ela.
Fig. 7.6 - Filtro LC em um conversor Buck
O último passo é substituir a chave S de duas posições. Na prática um único semicondutor não
pode realizar esta função, então são introduzidos a chave controlada M1 e o diodo D1, mostrado
em Fig. 7.7. Quando M1 é comandado a conduzir, substitui a chave na posição A, armazenando
energia no indutor. Quando M1 é bloqueado, a corrente circula pelo diodo D1 (diodo de
circulação), substituindo a chave na posição B.
vo Vin +
-
+
-
S
B
A L
C
vo Vin +
-
+
-
S
B
A
ton toff
Vo médio
Pos. Pos. A Pos. A
T
L VO

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 72
voVin
+
-
+-
L
CD1
M1
ControlePWM
Ref
Fig. 7.7- Conversor CC – CC abaixador “Buck”.
No modo de condução contínuo o conversor buck é equivalente a um transformador CC, onde a
relação de transformação pode ser continuamente alterada através da razão cíclica D.
A Figura 7.8 apresenta as etapas de operação e formas de onda para o conversor buck operando
no modo de condução contínuo.
voVin
+
-
+
-
L
C
D1
M1IO
IL
ID
IM
voVin
+
-
+-
L
C
D1
M1IO
IL
ID
IM
M1 (ON) M1 (OFF)
VL
-VO
Vin - Vo
iL
iM
ton toff
T
iD
Io
VL
VL
Fig. 7.8 - Etapas de operação e principais formas de onda de um conversor Buck.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 73
7.4 - Conversor Elevador (Boost)
O conversor mostrado na Fig. 7.9 é chamado de conversor boost ou elevador. Quando a chave
M1 está conduzindo, a corrente através do indutor L cresce, aumentando a energia armazenada
no mesmo. Quando a chave M1 é aberta, a corrente do indutor continua fluindo, agora através do
diodo D1, da rede RC e de volta à fonte. Nesta etapa o indutor transfere a energia armazenada na
primeira etapa para a carga.
voVin
+
-
+
-
L
C
D1
M1 ControlePWM
Ref
Fig. 7.9 - Conversor CC – CC Elevador “Boost”
A tensão sobre o capacitor C deve ser maior que a tensão da fonte para que haja transferência de
energia na segunda etapa. Além disso, a constante de tempo RC deve ser muito maior que o
período de comutação, para garantir que a tensão de saída permaneça aproximadamente
constante na primeira etapa quando o capacitor fornece energia para a carga. Para isso um
capacitor de valor relativamente elevado é necessário.
A Fig. 7.10 mostra as etapas de operação do conversor boost bem como suas principais formas
de onda, para operação em condução contínua e em regime permanente, ou seja após um tempo
suficiente para estabilizar as tensões e correntes no circuito. A tensão de saída é dada por:
D1V
V ino −
=

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 74
vo
+
-
+- C
D1
VL = Vin
Vin
+
-
+- C
D1
VL = Vin - Vo
vo
M1 (ON) M1 (OFF)
M1
Vin
M1
VL
Vin
Vin - Vo
IL
IL
ID
ID
IM
IM
iL
iM
ton toff
T
iD
IO
IO
Io
Fig. 7.10 – Etapas de operação e principais formas de onda de um conversor Boost.
7.5 - Fontes Chaveadas
A maioria dos equipamentos eletrônicos modernos usualmente necessita de uma ou mais tensões
de alimentação. O método mais comum de fornecimento destas tensões CC é a fonte de
alimentação que converte tensão da rede CA em várias tensões CC estabilizadas.
As duas fontes difundidas são as lineares e as chaveadas. As fontes Lineares consistem de um
transformador de entrada na freqüência da rede, circuitos retificadores, filtros e um regulador
linear.
As fontes chaveadas são dotadas de um retificador de entrada e um estágio de saída, que se trata
de um regulador chaveado isolado. A Figura 7.11 apresenta o diagrama de blocos de uma fonte
chaveada típica.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 75
Retificador eFiltro Retificador e filtro
Trafo
Conversor CC -CC com isolação
Saída CCregulada
PWMref.
controlador sinalmedidoO
N/O
FF
Circuito de controle
Rede CA60Hz
Fig. 7.11 – Diagrama de blocos de uma fonte chaveada típica.
As duas maiores vantagens da fonte chaveada em relação às fontes lineares são:
Os componentes responsáveis pela regulação operam como chaves (corte ou saturação),
evitando a operação na região ativa (linear), o que resulta numa significativa redução das
perdas de potência. A conseqüência disso é a alta eficiência, na faixa de 70 a 90%. Nas
fontes lineares a eficiência varia de 30 a 60%, tipicamente.
Já que o transformador para isolação opera em alta freqüência, o peso e o volume da fonte
podem ser bem reduzidos, comparados com a fonte linear, a qual usa transformador em
baixa freqüência (60Hz).
Por outro lado, as fontes chaveadas são mais complexas, possuem um maior custo e maior
dificuldade de manutenção. Além disso, geram interferências eletromagnéticas (EMI), devido ao
chaveamento em alta freqüência, o que requer a utilização de filtros.
Existem muitas estruturas de fontes chaveadas, todas originadas de conversores CC – CC
incluindo transformador para isolação. Em alguns casos o uso desta isolação implica na alteração
do circuito para permitir um adequado funcionamento do transformador, ou seja, para evitar a
saturação do núcleo magnético. Lembre-se que não é possível interromper o fluxo magnético
produzido pela força magneto-motriz aplicada aos enrolamentos.
Como exemplo tem-se o esquema simplificado de uma fonte que utiliza o conversor Forward
(originado do conversor Buck), como mostra a Figura 7.12.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 76
Fig. 7.12 – Esquema simplificado de uma fonte chaveada.
O comportamento deste conversor é similar ao conversor Buck. São duas as etapas de operação:
Etapa1 – As chaves M1 e M2 estão fechadas durante um tempo tON e os diodos D1 e D2 estão
cortados. O capacitor C de entrada fornece energia para o primário do transformador e o
secundário fornece energia para a carga. A corrente no indutor L cresce, armazenando energia no
mesmo.
Etapa2 – Quando as chaves M1 e M2 são abertas, os diodos D1 e D2 permitem que o
transformador seja desmagnetizado, devolvendo para o capacitor C a energia de magnetização
que foi recebida na etapa 1. Nesta etapa, a corrente no indutor L decresce, já que o mesmo
fornece energia para a carga através do diodo D4. O diodo D3 bloqueia a passagem de tensão
negativa do secundário do transformador para o filtro de saída. A relação entre a tensão de
entrada e saída é dada por:
DNN
VccVP
SinO ⋅⋅=
Onde NS/NP é a relação de espiras do transformador.
7.6 – Controle em Fontes Chaveadas
A implementação de uma (ou mais) malhas de controle tem por objetivo garantir a precisão no
ajuste da variável de saída (tensão e/ou corrente), bem como a rápida correção de eventuais
desvios provenientes de transitórios na alimentação ou mudanças na carga. A Figura 7.13
apresenta o diagrama de blocos de controle de uma fonte chaveada.
C
M1
D1M2
D2T_p
D3
D4 Co
L
REDECA
Controle
Vo
T_s

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Conversores CC-CC 77
Ampl.+
-
Controlador
Referência
Valor medido
Vcontrole
PWM
Sinais decomandopara aschaves
Circuito decomando
SinalPWM
on/off
Fig. 7.13 – Diagrama de blocos de controle de uma fonte chaveada.
A tensão de controle (Vcontrole) é obtida por um circuito controlador (compensador), que atua a
partir de dois sinais de entrada: o valor medido (tensão de saída, por exemplo), e um sinal de
referência desejada.
A modulação PWM pode ser obtida utilizando CIs dedicados, como: SG3524, SG3525, SG3526,
SG3527, TL494. As características específicas de cada CI variam em função da aplicação, do
grau de desempenho esperado, das proteções implementadas, etc.
Freqüentemente, são utilizados circuitos para comandar as chaves semicondutoras a partir do
sinal PWM, são os circuitos de
comando ou gate-drivers.
Dependendo do tipo de carga
ou do tipo de conversor, se faz
necessária isolação, o que
pode ser obtido por
transformadores de pulso.
A Figura 7.14 mostra dois
exemplos de circuitos de
comando, com ou sem
isolação, aplicados a Mosfets
ou IGBTs.
Rb1
R b2
+15V
Qb1
D b1
Zb1
Tb1
Rb3
Db2 D b3
Q b2Rb4
Z b2
PWM
G
S
Q1
Q2
R1
+15V
Q3
R3
R2
R4
RGPWM
G
S
Fig. 7.14 – Circuitos de comando.
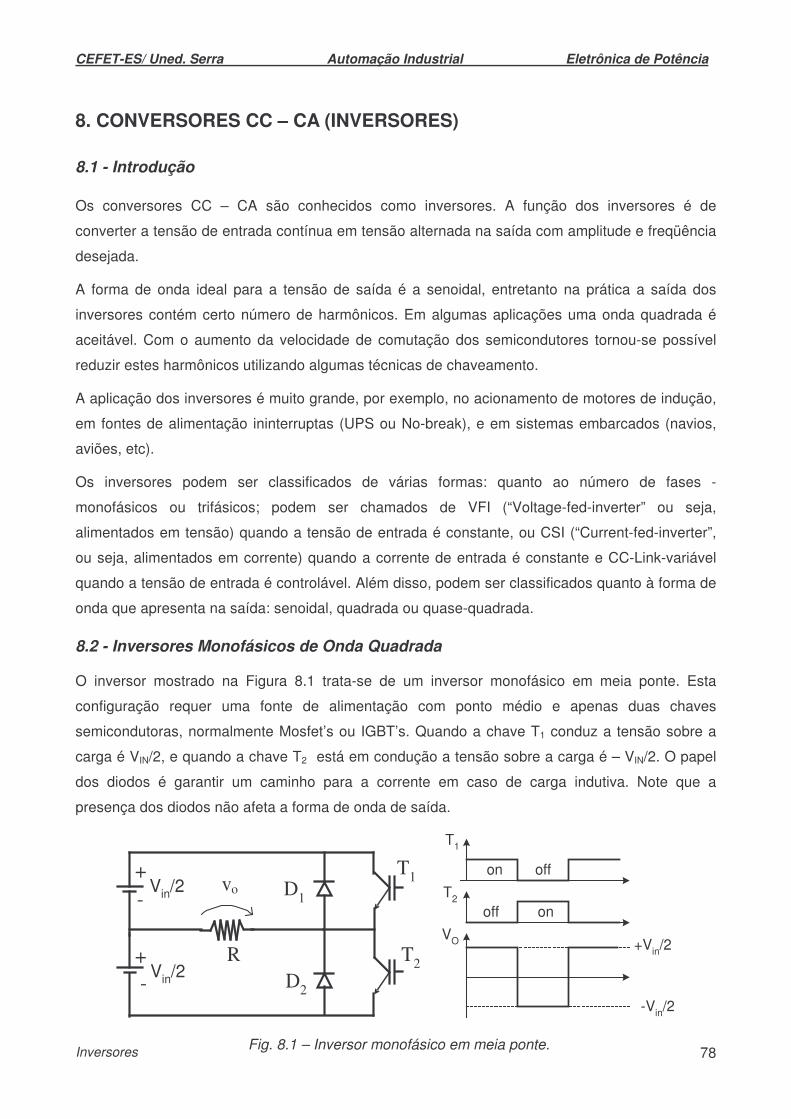
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 78
8. CONVERSORES CC – CA (INVERSORES)
8.1 - Introdução
Os conversores CC – CA são conhecidos como inversores. A função dos inversores é de
converter a tensão de entrada contínua em tensão alternada na saída com amplitude e freqüência
desejada.
A forma de onda ideal para a tensão de saída é a senoidal, entretanto na prática a saída dos
inversores contém certo número de harmônicos. Em algumas aplicações uma onda quadrada é
aceitável. Com o aumento da velocidade de comutação dos semicondutores tornou-se possível
reduzir estes harmônicos utilizando algumas técnicas de chaveamento.
A aplicação dos inversores é muito grande, por exemplo, no acionamento de motores de indução,
em fontes de alimentação ininterruptas (UPS ou No-break), e em sistemas embarcados (navios,
aviões, etc).
Os inversores podem ser classificados de várias formas: quanto ao número de fases -
monofásicos ou trifásicos; podem ser chamados de VFI (“Voltage-fed-inverter” ou seja,
alimentados em tensão) quando a tensão de entrada é constante, ou CSI (“Current-fed-inverter”,
ou seja, alimentados em corrente) quando a corrente de entrada é constante e CC-Link-variável
quando a tensão de entrada é controlável. Além disso, podem ser classificados quanto à forma de
onda que apresenta na saída: senoidal, quadrada ou quase-quadrada.
8.2 - Inversores Monofásicos de Onda Quadrada
O inversor mostrado na Figura 8.1 trata-se de um inversor monofásico em meia ponte. Esta
configuração requer uma fonte de alimentação com ponto médio e apenas duas chaves
semicondutoras, normalmente Mosfet’s ou IGBT’s. Quando a chave T1 conduz a tensão sobre a
carga é VIN/2, e quando a chave T2 está em condução a tensão sobre a carga é – VIN/2. O papel
dos diodos é garantir um caminho para a corrente em caso de carga indutiva. Note que a
presença dos diodos não afeta a forma de onda de saída.
T1
T2
on off
onoffVO +Vin/2
-Vin/2
+-
RD2
T1+-
T2
D1Vin/2
Vin/2
vo
Fig. 8.1 – Inversor monofásico em meia ponte.

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 79
Esta estrutura não permite variar a tensão de saída, a não ser que o controle seja feito no estágio
anterior ao inversor, ou seja, variando a tensão da fonte Vin.
Uma observação importante, é que jamais as chaves T1 e T2 podem conduzir ao mesmo tempo, o
que provocaria um curto-circuito, também conhecido como curto de braço. Sendo assim, na
comutação das chaves é introduzido um pequeno intervalo de tempo em que ambas as chaves
ficam abertas. Este tempo é chamado tempo morto, geralmente na ordem de µs.
Agora é apresentada a ponte completa que funciona com quatro chaves e uma única fonte de
alimentação conforme mostra a Fig. 8.2. Neste caso, o comando das chaves pode ser realizado
aos pares: T1-T4 e T2-T3.
R
+-
T2
T4
T1
T3
D1
D3
vo
D4
D2
V in
Fig. 8.2 – Inversor monofásico em ponte completa.
Quando as chaves T1 e T4 estão conduzindo, a tensão de saída é +Vin e quando as chaves T2 e T3
estão conduzindo, a tensão na saída é – Vin.
Uma alternativa que permite variar o valor eficaz da tensão de saída é a chamada onda quase-
quadrada, na qual se mantém um nível de tensão nulo sobre a carga durante parte do período.
Para obter este tipo de onda, basta alterar a estratégia de comando das chaves na ponte
completa. A Figura 8.3 mostra as formas de onda de tensão e corrente na carga para uma carga
indutiva.
+V
- V
T1 – T4 T 1 - D2
T2 – T3
T2 - D1 T1 – T4
Vo
Fig. 8.3 – Forma de onda quase-quadrada
IO

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 80
Para tensão positiva na carga, T1 e T4 são fechadas com T2 e T3 abertas. Para obter o intervalo de
tensão nula, T1 é mantido em condução e T4 é aberto. No caso de carga indutiva, o diodo D2
entrará em condução. Após a abertura de T1, fecham-se T2 e T3 tornando a tensão de saída
negativa. Para obter o próximo intervalo de tensão nula, T3 é aberto e T2 é mantido em condução,
o que provoca a entrada em condução de D1 caso a carga seja indutiva.
Uma outra topologia de inversor monofásico com onda quadrada é apresentada na Figura 8.4.
Trata-se de um inversor a SCR com comutação forçada.
Fig. 8.4 – Inversor monofásico a SCR com comutação forçada e formas de onda.
A fonte VE é colocada alternadamente em paralelo com cada uma das metades do enrolamento
primário do transformador. Na saída tem-se uma tensão alternada, cujo valor é determinado a
partir de VE e da relação de transformação do transformador (n).
O capacitor C permite a comutação dos SCR’s. Considerando que T1 conduz, a tensão sobre o
capacitor é Vc = +2Ve, assim, quando T2 é disparado, é aplicada uma tensão negativa sobre T1(-
2Ve) fazendo com que o mesmo corte. De forma semelhante ocorre no próximo semiciclo. A
finalidade dos diodos D1 e D2 é impedir a descarga do capacitor pelo secundário do transformador
quando ocorre o chaveamento dos SCR’s.
8.3 - Inversor Trifásico de Onda Quadrada
Em aplicações onde a carga é trifásica, como no acionamento de motores de indução, é
necessário um inversor trifásico. É possível alimentar estas cargas com três inversores
monofásicos separados, onde cada um produz uma tensão de saída defasada de 120o em relação
à outra. Esta alternativa na prática é economicamente inviável pois necessita de 12 chaves.
D1 D2
T1 T2
C1Ve
carga
VL
Vc
t
t
t
IGT1 T2 T1
VL
VC
-2Ve
+2Ve
n.Ve
- n.Ve

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 81
A forma mais comum de um circuito inversor trifásico consiste em três braços, um para cada fase,
como mostra a Fig. 8.5. Comandando adequadamente os seis interruptores de potência (IGBT’s),
obtém-se na carga tensões alternadas quadradas e defasadas de 120° uma da outra.
A seqüência de comandos dos IGBT’s, bem como as tensões de saída são apresentadas na
tabela abaixo. Como exemplo, analise o intervalo 1 onde os IGBT’s T1, T2 e T6 estão conduzindo e
os restantes estão cortados. Daí, as tensões são obtidas assim:
VRS = VR - VS = +V – (+V) = 0;
VST = VS – VT = +V – 0 = +V;
VTR = VT – VR = 0 – (+V) = -V.
Do mesmo modo podem ser obtidas as tensões
para os outros intervalos.
A Figura 8.6 mostra as formas de onda das
tensões de saída.
Intervalo IGBT’s– on VRS VST VTR
1 T1, T2, T6 0 +V -V
2 T4, T2, T6 -V +V 0
3 T4, T2, T3 -V 0 +V
4 T4, T5, T3 0 -V +V
5 T1, T5, T3 +V -V 0
6 T1, T5, T6 +V 0 -V
Fig. 8.5 - Inversor Trifásico.
V+
-
D6
D3T3
T6
T1
T4D4
T2
T5D5
D2
R S T
D 1
+V
-V
+V
-V
+V
-Vt
t
t
VRS
VST
VTR
1 2 3 4 5 6 1
Fig. 8.6 – Formas de onda das tensões de saída

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 82
8.4 - Inversores PWM
Nos inversores até então apresentados, a tensão de saída é alternada com forma de onda
quadrada (ou quase-quadrada) e sua freqüência pode ser ajustada controlando-se a freqüência de
chaveamento.
Numa outra categoria de inversores, tanto o valor eficaz da tensão de saída como o valor da
freqüência pode ser controlado utilizando-se a estratégia de modulação PWM (modulação por
largura de pulso). Isso permite inclusive reduzir o conteúdo harmônico da tensão de saída,
obtendo uma onda praticamente senoidal. A modulação PWM consiste em variar a largura dos
pulsos de comando dos interruptores de potência.
Existem diversas técnicas de modulação PWM, onde a mais usual é a PWM senoidal. Neste
caso, a largura dos pulsos é modulada por um sinal senoidal. Isso quer dizer que a largura dos
pulsos é alterada de acordo com um sinal senoidal de referência.
É possível obter este tipo de modulação ao comparar uma tensão de referência senoidal (que seja
imagem da tensão de saída buscada), com um sinal triangular simétrico cuja freqüência determina
a freqüência de chaveamento. A freqüência da onda triangular (chamada portadora) deve ser, no
mínimo 20 vezes superior à freqüência da onda de referência, para que se obtenha uma
reprodução aceitável da forma de onda sobre a carga, depois de efetuada a filtragem. A largura do
pulso de saída do modulador varia de acordo com a amplitude do sinal senoidal de referência.
Tem-se assim uma Modulação por Largura de Pulso.
A Figura 8.7 reapresenta um inversor monofásico em ponte, cujos IGBT’s serão agora
comandados por sinais PWM em alta freqüência (2,5 a 16kHz, tipicamente). A Figura 8.8 mostra o
resultado da modulação por onda senoidal, produzindo na saída uma tensão com 2 níveis, na
freqüência da onda triangular. A tensão de saída, que é aplicada à carga, é formada por uma
sucessão de ondas retangulares de amplitude igual à tensão de alimentação CC e duração
variável.
Fig.8.7 – Inversor Monofásico.
R
+-
T2
T4
T1
T3
D1
D3
vo
D4
D2
V in
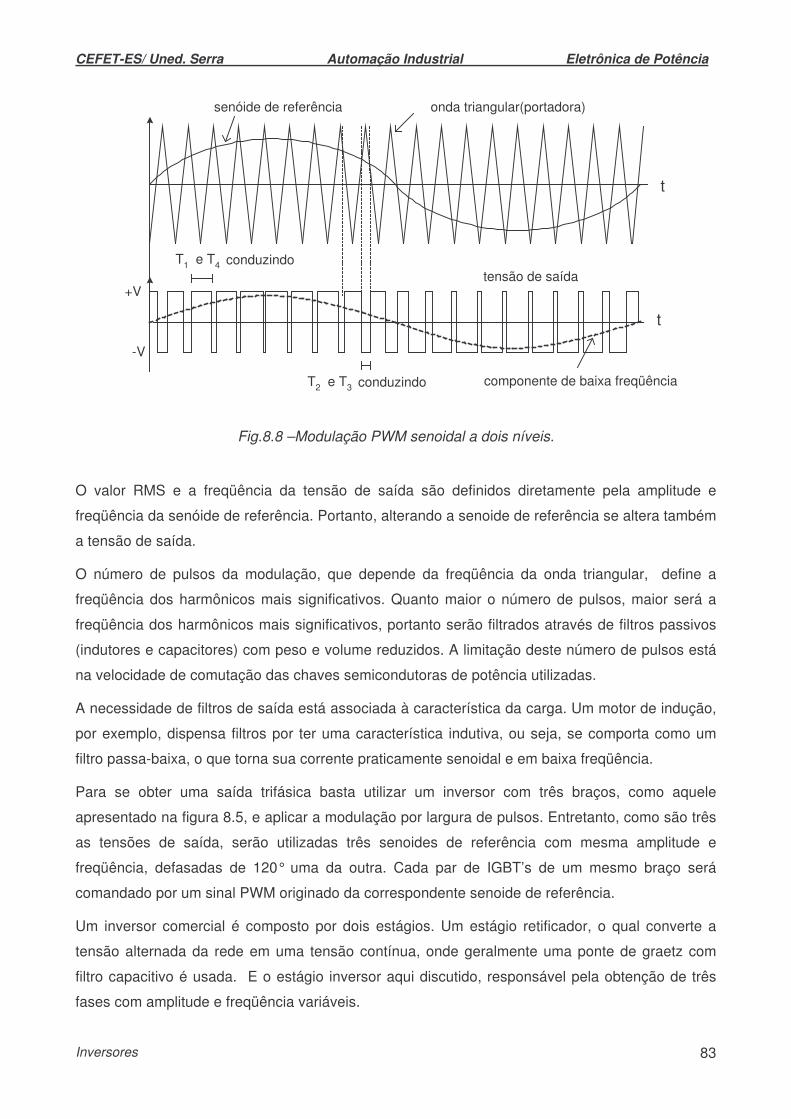
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 83
Fig.8.8 –Modulação PWM senoidal a dois níveis.
O valor RMS e a freqüência da tensão de saída são definidos diretamente pela amplitude e
freqüência da senóide de referência. Portanto, alterando a senoide de referência se altera também
a tensão de saída.
O número de pulsos da modulação, que depende da freqüência da onda triangular, define a
freqüência dos harmônicos mais significativos. Quanto maior o número de pulsos, maior será a
freqüência dos harmônicos mais significativos, portanto serão filtrados através de filtros passivos
(indutores e capacitores) com peso e volume reduzidos. A limitação deste número de pulsos está
na velocidade de comutação das chaves semicondutoras de potência utilizadas.
A necessidade de filtros de saída está associada à característica da carga. Um motor de indução,
por exemplo, dispensa filtros por ter uma característica indutiva, ou seja, se comporta como um
filtro passa-baixa, o que torna sua corrente praticamente senoidal e em baixa freqüência.
Para se obter uma saída trifásica basta utilizar um inversor com três braços, como aquele
apresentado na figura 8.5, e aplicar a modulação por largura de pulsos. Entretanto, como são três
as tensões de saída, serão utilizadas três senoides de referência com mesma amplitude e
freqüência, defasadas de 120° uma da outra. Cada par de IGBT’s de um mesmo braço será
comandado por um sinal PWM originado da correspondente senoide de referência.
Um inversor comercial é composto por dois estágios. Um estágio retificador, o qual converte a
tensão alternada da rede em uma tensão contínua, onde geralmente uma ponte de graetz com
filtro capacitivo é usada. E o estágio inversor aqui discutido, responsável pela obtenção de três
fases com amplitude e freqüência variáveis.
onda triangular(portadora)senóide de referência
tensão de saída+V
-V
T1 e T4 conduzindo
T2 e T3 conduzindo componente de baixa freqüência
t
t

CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
Inversores 84
Em meio Industrial tem-se aumentado cada vez mais o uso de inversores destinados ao
acionamento de motores de indução. As aplicações vão das menos complexas, como
acionamentos de bombas, a até complexos sistemas de automação industrial e de transporte de
massas. Trata-se de uma tecnologia iniciada a mais de 25 anos e que está em crescente
desenvolvimento e ascensão.
CEFET-ES/ Uned. Serra Automação Industrial Eletrônica de Potência
85
REFERÊNCIAS BIBLIOGRÁFICAS
1. N. Mohan, T. M. Undeland e W. P. Robbins, POWER ELECTRONICS: Converters
Aplications and Design, John Wiley & Sons.
2. Ivo Barbi, Eletrônica de Potência, Editora da UFSC, 1986.
3. CATE – Centro de Aplicações de Tecnologias Eficientes Guia Operacional de
Acionamentos Eletrônicos, Versão 1.0, PROCEL, CEPEL, ELETROBRAS, 1998.
4. M. H. Rashid, Power Electronics: Circuits, Devices and Applications, Prentice Hall
International Edition, 1988.
5. J. M. Peter, Characteristics of Power Semiconductors, Application Notes – ST
Microelectronics, 1999
6. International Rectifiers, Power Semiconductors Products Digest 92/93
7. Motorola Semiconductor Master Selection Guide
8. Interactive Power Electronics on Line Text, www.utexas.edu/world/lecture – Power
electronics
9. José L. A. Almeida – Eletrônica de Potência, Editora Érica (SP), 1986.
10. José L. A. Almeida – Eletrônica Industrial, Editora Érica (SP), 1991.
11. José L. A. Almeida – Dispositivos Semicondutores: Tiristores, Editora Érica (SP),
1996.
12. Luiz F. P. Mello – Análise e Projeto de Fontes Chaveadas, Editora Érica (SP), 1996.
Recommended

![ep peplen6! ep el epeq pepnp eålsanu ue saJe(ntu sel ep soqoaaa„ ep pepn!0 el ap ose]ôuoo ua „souewnH soqoeaea ep epelew ue seLLMOJ9J senenu pepllemoe 'soqoeJaa ep osno- ep pepno](https://img.pdfslide.net/doc/110x75/5f893ef78ba6ae5980499ba8/ep-peplen6-ep-el-epeq-pepnp-elsanu-ue-sajentu-sel-ep-soqoaaaa-ep-pepn0-el.jpg)






![· 0Jeuow ep Josedsa ep sop ep uqse]dwoo ep odoo sonoqoz uoo sopouêllô] OZIOOW OllYPOl ep sau0410A9J uoo 'DJepow ep sopn6!A ep …](https://img.pdfslide.net/doc/110x75/5b97016309d3f27e758c2ada/-0jeuow-ep-josedsa-ep-sop-ep-uqsedwoo-ep-odoo-sonoqoz-uoo-sopouello-ozioow.jpg)








