ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ
BİTİRME ÇALIŞMASI TEZ KİTAPÇIĞI
KONU: Zagi Tipi Bir İnsansız Hava
Aracının (İHA) Tasarımı ve Bilgisayar
Görmesine Dayalı Olarak Kontrol
Yazılımının Geliştirilmesi
G120900024 Mehmet DEMİR – G120900033 Bayram GÜNEŞ
Danışmanı: Prof. Dr. Raşit KÖKER
Mayıs 2017
SAKARYA

ii
ÖNSÖZ
Mühendislik yaşamımızda iyi bir referans olacağını düşündüğümüz bu çalışma, lisans
eğitimimiz boyunca almış olduğumuz temel mühendislik derslerinin yanı sıra daha önce
gerçekleştirmiş olduğumuz ödev ve proje çalışmalarında kazandığımız deneyimleri en üst
düzeyde bir araya getirmemiz suretiyle gerçekleşmiştir.
Çalışmalarımız boyunca bize her türlü konuda destek veren danışman hocamız Sayın
Prof. Dr. Raşit KÖKER’e, tüm sorularımızı sıkılmadan cevaplayan ve bizi yönlendiren
Sayın Yrd. Doç.Dr Mustafa Zahid YILDIZ’a ve bu tasarım çalışmamızda; Sakarya
Üniversitesi Rektörlüğüne, Teknoloji Fakültesi Dekanlığına, bölüm olanaklarının
kullanılmasına izin verdiği için Bölüm başkanlığına, labaratuar ortamında bize yardımcı
olan teknisyenlerimize, ailelerimize teşekkürü bir borç biliriz.
Mayıs 2017
Sakarya
Bayram Mehmet
GÜNEŞ DEMİR
iii
İÇİNDEKİLER
Bitirme Çalışması Onay Formu ……………………… i
Önsöz ……………………… ii
İçindekiler ……………………… iii
Özet ……………………… v
Semboller Ve Kısaltmalar Listesi ……………………… vi
Şekiller Listesi ……………………… vii
Tablolar Listesi ……………………… viii
1. GİRİŞ 1
1.1. Genel Bilgiler …………………………………………. 1
1.2. Litaretür Araştırması…………………………………… 2
1.3. Özgünlük…………..…………………………………… 3
1.4. Yaygın Etki ……….…………………………………… 4
1.5. Standartlar……………………………………………… 4
1.6. Çalışma Takvimi…..…………………………………… 5
2. TEORİK ALTYAPI 7
2.1. Genel Bilgiler …………………………………………. 7
2.2. Mikrobilgisayarlar……………………………………… 7
2.3. Motorlar.……. …………………………………………. 14
2.3.1. Servo Motor……………………………..……………… 14
2.3.2. Brushless (fırçasız) Motor……………………..……….. 17
2.4. DHT11 Sıcaklık ve Nem Sensörü……………………… 18
2.5. LM35 Sıcaklık Sensörü.………………………………… 19
2.6. LM 7805 5V Gerilim Düzenleyici……………………… 20
2.7. RF Haberleşme …………………………………………. 20
2.8. RTC DS1307(Gerçek Zamanlı Saat)...…………………. 24
2.9. ULN2003A Entegresi .…………………………………. 25
3. TASARIM 27
3.1. Genel Bilgiler …………………………………………. 27
3.2. Boyutlandırmalar……………………………………….. 27
3.3. Sistem Bileşenleri ve Seçimleri..……………………….. 27
3.4. Uygulanan Yöntemler….……………………………….. 32
3.5. Yazılımlar……………………………………………….. 32
3.5.1. Visual Studio……………………………..……………… 32
3.5.2. C++…………………………………………..………….. 32
3.5.3. OpenCV…………………………………………………. 33
3.5.4. Yazılımın Akış Diyagramı…………………..………….. 34
3.5.5. Kontrol Yazılımı.……………………………………….. 34
3.6. Malzeme Listesi ve Ekonomik Analiz………………….
4. SİMÜLASYON(BENZETİM) ÇALIŞMALARI
35
36

iv
4.1. Genel Bilgiler …………………………………………... 36
4.2. Simülasyon Yazılımı…..……………………………….… 36
4.2.1. Proteus …………………………..……………………….. 36
4.2.2. Catia ………………………………………..……………. 36
4.3. Sistem Modelleme………………………………………... 36
4.4 Simülasyon……………………………………………….. 37
5. GÖRÜNTÜ İŞLEME 38
5.1. Görüntü İşlemenin Tanımı……………………………… 38
5.2. Görüntü İyileştirme Teknikleri ………………………… 40
5.2.1 Gri Seviyeye Dönüştürme………………………………. 40
5.2.2 Histogram………………………………………………. 41
5.2.3 Eşikleme ……………………………………………….. 42
5.2.4 Medyan (Ortanca) Filtre……………………………… 44
5.2.5 Kenar Belirleme………………………………………..... 45
6. DENEYSEL ÇALIŞMALAR 48
6.1. Genel Bilgiler…………………………………………….. 48
6.2 İnsansız Hava Aracı Tasarımı Joystick Kontrol İçin
Gerekli Yazılımlar…………………………………………………... 48
6.2.1 Genel Açıklama…………………………………………. 48
6.2.2 Yazılım Hakkında Bilgi………………………………….. 49
6.3. Elektronik Devrelerin Gerçeklenmesi…………………… 52
6.4. İnsansız Hava Aracı Tasarımı (Zagi)…………………… 54
6.5. Zagi Üzerine Elektronik Elemanların Yerleştirilmesi…… 56
7. SONUÇLAR 57
7.1. Genel Açıklamalar……………… .……………………... 57
7.2. Deney Sonuçları………………... ……………………… 58
7.3. Değerlendirmeler………............. ……………………… 59
KAYNAKLAR 60
EKLER 61
ÖZGEÇMİŞ 67
v
ÖZET
Günümüzde çok farklı şekil, ebat, konfigürasyon ve karakterde araçlar üretilmektedir.
Tarihsel olarak bakıldığında basitçe İHA’ Lar birer “Drone” dur. Ancak bağımsız
kumanda sistemleri çok geliştirilmiştir. Bunun sebebi kumanda sistemlerinin İHA’ Lar
ile güdümlü füzelerin farklarını ortaya çıkartmaktır.
Öncelikle İHA’ Lar birçok amaç için tekrar tekrar kullanılabilir. Mürettebatsız olarak
kontrol edilerek durmadan belli bir irtifada uçabilir. Ayrıca bu araçlar jet motoru veya
elektrikli motor yardımıyla uçar.
Günümüzde halen İHA’ Lar için bağımsız kumanda sistemleri sürekli olarak
geliştirilmekte ve araçların kullanılması için en uygun tasarımlar ve çalışmalar
yapılmaktadır.
Kumanda sistemleri genellikle Joystick tabanlı olarak tasarlanmakta ve ara bir eleman
olarak sürekli kullanılmaktadır. Bu araştırma projesinde; Ara eleman olarak kullanılan
joystick’i ortadan kaldırmak ve joystick kullanımından kaynaklan problemlerinde belirli
bir oranda azaltılması amacıyla görüntü işleme teknolojisi kullanılarak bilgisayar
üzerinden İHA’ nın kontrol edilmesi hedeflenmiştir.
Hedefe ulaşmak için aşağıdaki adımlar gerçekleştirilecektir;
İnsansız hava aracının tasarlanması
Motor sürücü devre tasarımlarının yapılması
Gerekli olan elektronik kart tasarımlarının yapılması
Yazılım algoritmalarının tasarlanması ve uygulanması
Aracın ve yazılımın çalışma hassasiyetlerinin belirlenmesi
Sonuçların rapor edilmesi ve görüntülenmesi
vi
SEMBOLLER VE KISALTMALAR LİSTESİ
İHA :İnsansız Hava Aracı
LED : Light Emitting Diode
OPENCV : Open Source Computer Vision
RGB : Red Green Blue
RPİ : Raspberry Pi
YSA : Yapay Sinir Ağları
ÇKA : Çok Katmanlı Algılayıcı
MP : Megapixel
CPU : Central Processing Unit
USB : Universal Serial Bus
MHZ : Megahertz
GHZ : Gigahertz
V : Volt
HDMI : High Definition Multimedia Interface
IDE :Integrated Development Environment
FPGA : Donanım yapısı kullanıcı tarafından değiştirilebilen entegre
RTC : Real-Time Clock
RF :Radio Frekansı
DHT11 :Sıcaklık ve Nem sensörü
LM35 :Sıcaklık sensörü
mm : Milietre
mA : Miliamper
A :Amper
V :Volt

vii
ŞEKİLLER LİSTESİ
Şekil 1.1. Kontrol Ekranı ………………………………..……………………………….2
Şekil 1.2. İnsansız Hava Aracı………………..…………………………………………..2
Şekil 2.1. Kontrol Ekranı………...……………...……………………………………......7
Şekil 2.2. İnsansız Hava Aracı…………...……………………………………………….7
Şekil 2.3. Arduino Nano…………...………...…………………………………………...7
Şekil 2.4. Arduino Mega……………..………………………………………………….11
Şekil 2.5. Raspberry Pi 3………………...……...………………………………………14
Şekil 2.6. Servo İç Yapısı………………...……………………………………………..15
Şekil 2.7. Servo Motor……………...…………………………………………………..17
Şekil 2.8. Brushless Motor…………………...…………..……………………………..19
Şekil 2.9. DHT11 Sıcaklık ve Nem Sensörü……………………….……………………19
Şekil 2.10. LM35 Sıcaklık Sensörü………......…………………………………………21
Şekil 2.11. LM7805 Tümdevresi……………………......………………………………22
Şekil 2.12. Elektromanyetik Dalga Yayılımı……..…………………………………......22
Şekil 2.13. RF Haberleşme Temel Yapısı………………..…………………………......25
Şekil 2.14. RF Verici……………..…………………………………………………......25
Şekil 2.15. RF Alıcı………...………………...…………………………………………25
Şekil 2.16. RTC DS1307…………......…………………………………………………26
Şekil 2.17. RTC DS1307 İç Yapısı………………..…………………………………….27
Şekil 2.18. ULN2003A Devre İç Yapısı……..………………………………………….28
Şekil 2.19. ULN2003A Entegre İç Yapısı……..……………………………………......28
Şekil 3.1. Zagi Tasarımı………………………………………………………………...29
Şekil 3.2. Zagi Boyutlandırması………………………………………………………...29
Şekil 3.3. Arduino Nano Boyutları……………………………………………………...30
Şekil 3.4. Lipo Pil……………………………………………………………………….31
Şekil 3.5. Lipo Pil Batarya………………………………………………………………32
Şekil 3.6. Visual Studio Programı……….……………………………………………...34
Şekil 3.7. C++ Yazılım Dili………………………….…………………………………35
Şekil 3.8. OpenCV Bileşenleri………………………………………………………….35
Şekil 4.1. Proteus Zagi Kontrol Tasarımı……………………………………………….39
Şekil 4.2. Catia Kontrol Tasarımı………………………….……………………………40
Şekil 5.1. Görüntü İşleme Sistemi………………………………………………………40
Şekil 5.2. Görüntü Oluşumu…………………………………………………………….42
viii
Şekil 5.3. Görüntünün İki Boyutlu İfadesi………………………………………………42
Şekil 5.4. Görüntünün Pixel İfadesi…………………………………………………….43
Şekil 5.5. Histogram Eşitleme………………………….………………………….........45
Şekil 5.6 Eşlemenin Grafiksel İfadesi………………..………………………………….46
Şekil 5.7. Örnek İmge Histogramı ve İkili Eşikleme İşlevine İlişkin Giriş ve Çıkış İmge
leri...….…………………………………………………………………………………46
Şekil 5.8. Örnek İmge Histogramı ve Çoklu Eşikleme İşlevine İlişkin Giriş ve Çıkış İmg
eleri…..…………………………………………………………………………………47
Şekil 5.9. Medyan Filtre…………...…..…………………………………………..........48
Şekil 5.10. Gradient Vektörü………...…………………………………………….........49
Şekil 5.11. Kenar Belirleme Sisteminin Blok Diyagramı…………………………........50
Şekil 5.12. Kenarı Belirlenmiş Resim………..…………………………………………51
Şekil 6.1. Bilgisayar Görmesine Dayalı Joystick Ekranı………………………………..52
Şekil 6.2. Zagi Kontrol Birimi Yazılım Uygulaması……………………………………53
Şekil 6.3 Araç İletişim Birimi Yazılım Uygulaması………………………………........54
Şekil 6.4. Bilgisayar Görmesine Dayalı Joystick Kontrol Kodlama Mantığı Yazılımı….55
Şekil 6.5. Joystick Kontrol Uygulama Devresi ve Yazılımı………………………........56
Şekil 6.6. Arduino’nun Board Üzerinde Denenmesi……………………………………57
Şekil 6.7. Baskı Devreye Aktarma………………………………………………………57
Şekil 6.8 .Motorların Denenmesi…………………………………………....…………..58
Şekil 6.9. Araç İletişim Birimi Proteus Devresi…………………………………………58
Şekil 6.10. Araç İletişim Birimi Uygulama Devresi…………………………………….59
Şekil 6.11. Zagi Tasarımı……………………………………………………………….60
Şekil 6.12. Zagi Birimi Proteus Devresi………………………………………………..60
Şekil 6.13. Zagi Birimi Ares Devresi……………………………………………………61
Şekil 6.14. Zagi Birimi Uygulama Devresi…………………………………………......61
Şekil 6.15. Elemanların Yerleştirilmesi…………………………………………………62
Şekil 6.16. Elemanların Yerleştirilmesi…………………………………………………62
Şekil 7.1. Joystick Kontrol Birimi………………………………………………………66

ix
TABLOLAR LİSTESİ
Tablo 1.1. İş-Zaman Grafiği……………………………………………………………..5
Tablo 2.1. Servo Motor Akım-Açı Grafiği…………..…………………………………18
Tablo 2.2. Frekans Spektrumu………………….………………………………………23
Tablo 2.3. Mikrodalga Frekansları Harf Bant Dağılımı………….……………………24
Tablo 3.1. Konsol Ekran Tasarımı……………………..………………………….........37
Tablo 3.2. Malzeme Listesi………………….………………………………………….38
Tablo 6.1. Teorik Konsol Ekranı………………………………………………….........53
Tablo 7.1. Alınan Malzemeler………………………………………………………….63
Tablo 7.2. Hız Analiz Değerleri………………………………………………………...65
1
1. GİRİŞ
1.1. Genel Bilgiler
İlk İHA’lar A. M. Low tarafından 1916 yılında geliştirilmiştir. Takip Eden yıllarda ise
sınırlı sayıda üretilen Hewitt- Sperry otomatik uçak I. Dünya Savaşı sırasında
kullanılmıştır.
1935 yılında ise film yıldızı ve model uçak tasarımcısı ReginaldDenny ilk ölçekli RPV
(İngilizce Remote Piloted Vehicle Türkçesi Uzaktan Komutalı Araç) modelini
geliştirmiştir.
II. Dünya Savaşı süresince çok fazla miktarda uçak üretilmiş bunlar trenleri koruma
amaçlıyla uçaksavar ve saldırı görevlerinde kullanılmıştır.
Jet motoru bulunan ilk model 1951 yılında Teledyne Ryan firması tarafından geliştirilen
FirebeeI dir. 1955 yılında ise başka bir firma Beechcraft ABD
Deniz Kuvvetleri için Model 1001 modelini üretmiştir. Bununla beraber bu araçlar
Vietnam Savaşı süresince birer uzaktan kumandalı uçak olmaktan daha
ileriyegidemediler.1980li ve 1990lı yıllarda olgunlaşan ve küçültülen bu araçlar özellikle
ABD’li askeri çevrelerin ilgisini çekmeye başlamıştır. Bunun en önemli nedeni İHA’ların
uçaklara nazaran çok daha ucuz olması ayrıca riskli görevlerde sırasında yetişmiş
mürettebat kaybını sıfıra indirmesidir.
İnsansız teknolojilerin kullanımının yaygınlaşmasının altında gelişen teknolojinin
sağladığı imkânla birlikte bazı maliyetli ya da sorunlu kalemleri aşabilmenin
getirisi bulunmaktadır.
İnsansız uçakların otonom ya da bir yer istasyonu aracılığıyla kontroledilebiliyor olması
insanlı uçakların idamesi için gerekli yaşamsal sistemler ve kokpit için gerekli yer ve
mürettebatın getirdiği ağırlık yükü gibi maliyet kalemleri, insanlı uçakların manevra ve
operasyon kabiliyetinin insan kabiliyetleriyle sınırlanması(yorgunluk / çalışma saati, G
kuvveti vb.) gibi operasyon el kabiliyetle ilgili kalemler, düşman tarafından fark edilme
ya da vurulabilme olasılığının düşük olması üstünlük kalemleri (ilk olarak İsraillilerin
geliştirdiği Scout ile birlikte İHA’ ların bu yönüyle operasyon el vazgeçilmezliğinin
ispatlanmıştır.) İHA' ları daha tercih edilir kılmaktadır.
Daha da önemlisi, insansız hava araçlarının zayiat maliyetidir.
2
İnsanlı uçakların manevra ve operasyon kabiliyetinin insan kabiliyetleriyle sınırlanması
(yorgunluk / çalışma saati, G kuvveti vb.) gibi operasyon el kabiliyetle ilgili kalemler,
insansız hava araçlarında teknolojinin verdiği imkânlar sayesinde ortadan kaldırılmaya
ve azaltılmaya çalışılmaktadır.
İnsansız hava araçlarında yapmayı amaçladığımız bu projede manevra hareketlerinin hızlı
bir şekilde yapılması amaçlanmıştır. Bunun için gerekli yazılımlar ve tasarımların
yapılması amaçlanmaktadır.Bu yazılımlardan önemli olanlardan biride görüntü işleme
yazılımlarıdır. Bunlar;
Günümüzde, görüntü işleme ve nesne tanıma çalışmaları ve araştırmaları arttıkça
uygulama alanları da hızla gelişmektedir [19][6][Kamera gibi görüntü araçlarının
sağladığı görüntüyü ve görüntü işleme algoritmalarını kullanarak karar verebilen yapısı
ile nesneleri tanıyan ve taşıma, yer değiştirme yapan robotik sistemler geliştirilmektedir.
[17][1][2][3]Bilgisayar ve makine görmesi kavramı bu gelişmelerle ortaya çıkan, gören
makinelerin teknolojisidir. [17][1][2][3] Bu tür sistemlerde yaygın olarak yapay sinir ağı
(YSA) tekniği kullanılmaktadır [2][6]
Bu bitirme çalışması projesinde Tübitak 2209-A Üniversite Öğrencileri Yurt İçi
Araştırma Projeleri Destek Programı kapsamında destek alınmıştır.
Şekil 1.1. Kontrol Ekranı Şekil 1.2.İnsansız Hava Aracı
1.2. Literatür Araştırması
Wang ve arkadaşları, trafikte seyir halinde ki araçların algılanması ve
izlenmesi ile ilgili bir çalışma yapmışlardır. Çalışmalarında metropol
şehirler trafik durumunun izlenmesi ve çözüm önerilerinin geliştirilmesine
katkı sağlamayı hedeflemişlerdir [1].
Weng ve arkadaşları, insansız hava araçlarının birbirleri ile etkileşimi ve
görevleri sırasında optimum çalışabilmelerine yönelik olarak yapay

3
bağışıklık sistemi algoritmasını kullanmışlardır. Kullanılan algoritma ile
başarılı bir sürü optimizasyonu uygulaması gerçekleştirmeyi
hedeflemişlerdir [2].
Antonio ve arkadaşları, insansız hava araçlarını doğada kırsal bölgelerde
bulunan özel karbon kayaların yerlerinin tespitine yönelik olarak
kullanmışlardır. İHA’lar kayaların yerlerinin belirlenmesine yönelik olarak
gerekli olan elektronik donanımlarla donatılarak çalışmaları
gerçekleştirmişlerdir. [3]
Anıl Can BİRDAL’ın ağaç yüksekliklerinin belirlenmesinde insansız hava
araçlarının kullanımı için yaptığı çalışmalarda insansız hava araçları ile
Ormancılık sektöründe, çeşitli alıcılar ile ağaç yüksekliklerinin
hesaplanması ve taçlarının kestirimi için kullanımını tasarlayıp
sunmuştur.[20]
Yılgın, Serdar insansız hava aracı (İHA) takımları için görev planlama
adıyla yaptığı çalışımlarda insansız hava araçları ile etkileşiminin
sağlanarak yapılacak olan işlemlerin genetik algoritma kullanılarak
minimum ve optimum seviyede yapılması ayrıca bu durumların analizi için
geliştirdikleri 2. Bir algoritma ile bu sonucu analiz ederek karşılaştırdıkları
çalışmaları sunmuşlardır.[19]
Bradski, G. Ve arkadaşları kamu lisansına sahip olan açık kaynak kodlu
bilgisayar görnesi kütüphanesi olan Opencv alanında ABD’de uygulamalı
çalışmalar yapmışlardır.[6]
1.3. Özgünlük
İHA’ nın kontrol sisteminin (kumanda) ortadan kaldırılması ara birime duyulan ihtiyacın
ortadan kalkmasına ortam hazırlayacaktır.
Amaç olarak insansız hava aracının kontrol kumandasının yerine görüntü işleme
kullanılarak algılanmak istenen el hareketinin şekli algılanıp kenar belirlemesi yapılıp
hu moment kütüphanesi kullanılarak alınan sayısal değerler ile bir yapay zeka teknolojisi
kullanılarak zekilik katılıp İHA’ nın daha hassas bir şekilde hareket manevralarının
hızlanması sağlanacaktır.

4
1.4. Yaygın Etki
- Yerli iha kontrol tasarımlarında görüntü işleme teknolojilerinin kullanılmasını
sağlayacaktır.
- İha’nın uzaktan kontrolünde hız ve kaliprasyonu artıracaktır.
- Görüntü işleme teknolojisi ile iha ların kontrol edilmesi dikkat çekecektir.
- Gerekli güvenlik tedbirleri alındığında çevreye herhangi bir zararı yoktur.
Günümüzdeki iha kontrol sistemlerine göre ekonomik, zaman ve üretim
yönünden kolaylık sağlayacaktır.
- Yayın çıkarma potansiyeli vardır.
- Ulusal makalelerde yayınlanabilir.
1.5. Standartlar
SİVİL Havacılık Genel Müdürlüğü (SHGM) göre belirlenen standartlar;
İHA uçuşları, insan ve yapılardan en az 50 metre uzaklıkta gerçekleştirilebilecek.
Standartlar çerçevesinde, azami kalkış ağırlığı 500 gr ila 25 kg aralığında olan İHA’ların
ve bunları kullanacak pilotların SHGM tarafından oluşturulan internet tabanlı 'Kayıt
Sistemi'ne kayıt edilmesi gerekmektedir. Bunun dışındaki azami kalkış ağırlığı 25 kg ile
150 kg aralığında olan ikinci gruptaki İHA’lar ile azami kalkış ağırlığı 150 kg ve daha
fazla olan İHA’ların Türk hava araçları tesciline kayıt yaptırmaları gerekiyor. Bizim
tasarladığımız insansız hava aracı 500 gr altında 50 metre yüksekliğin altındadır.[5]
Brushless Dc motor standartları 1400 KV/ XA 2212 prop 7”-8” lipopil standartı 2-3S
Batarya standartları 2 S 3,7*2 =7,4 V 450 mAh 25C.
ESC standartları 10 A 2-3 S lipo batarya kullanılabilir.
100mm erkek -erkek kablo kullanılmıştır

5
1.6. Çalışma Takvimi
Tablo 1.1 İş-Zaman Grafiği.
İŞ PAKETLERİ ŞUBAT MART NİSAN MAYIS HAZİRAN Literatür taraması
Projenin planlaması, Malzemelerin
tedarik edilmesi, İnsansız hava aracının
tasarlanması ve yapılması
Servo ve dc motor sürücü devrelerinin
tasarlanıp test edilmesi. Rasperry Pi veya
Arduino için yazılım algoritmalarının
tasarlanması
Opencv veya Emgu cv kütüphanelerinin
kullanılması. Bilgisayar yazılım dili
kullanılarak C++ ve C nin kullanılması.
Tasarlanan elektronik sistemin İHA’ya
simülasyon ortamında entegre edilmesi
Sonuç Raporları
Literatür taraması –geçmişten günümüze yapılan tüm çalışmalar
http://ieeexplore.ieee.org/ ve www.sciencedirect.com adreslerinden
araştırılıp bizim proje mantığına uyan makaleler taranarak uygulanan
uygulamalar teker teker incelenmiş ve analiz edilmiştir.
Malzeme tedarik edilmesi ve aracın tasarlanması – literatür taraması
yapıldıktan sonra yapılması planlananlar için bir uygulama planı yapılır.
yapılan planda gerekli olan tüm malzemeler çıkarılarak, alternatif olarak en
hassas malzemelerden 2 şer 3 er tane sipariş verilerek donanım eksikleri
tamamlanmaya çalışılır.
İnsasız hava aracının similasyon ortamında çizimi yapılarak kullanılacak
malzemenin dayanım mukavemeti, hassasiyet değerleri, kullanılan malzeme
miktarı, ağırlık merkezinin belirlenmesi üzerine konulacak olan
kompenentlerin yerlerinin tam olarak kesinleştirildikten sonra malzeme
alımı yapılacaktır.
6
Malzemeler alınırken malzemelerin fiyatları ve kalitesi göz önünde
bulundurularak firmalar araştırılıp en uygun maliyet ve kalitede ürün alımı
yapılacaktır
Motor kontrol denetiminin yapılması ve yazılım algoritmalarının
çıkarılması – Motorların sağlamlık kontrolü ve çevreye verecekleri zararlar
kontrol edildikten sonra bunların sürücü devre tasarımları bu hassasiyetler
göz önünde bulundurarak tasarlanacaktır.
Sistemlerin kontrolü için gerekli olan mikrodenetleyiciler kullanılacak ve bu
mikrodenetleyicilerin ide(yazılım geliştirme)ortamları için gerekli
algoritmalar oluşturulacaktır. Alternatif olarak motor ve sürücülerin hazır
alınması sağlanacaktır.
Algoritmaların yazılıma dökülmesi – belirlenen algoritmalarda
kullanılacak olan bilgisayar yazılımı c++ veya c# kullanılacak ve gerekli
olan kütüphaneler ide ortamına eklenecektir. Alternatif olarak yazılım dili
matlap veya pyhton da kullanılacaktır.
Tasarımın simülasyon ortamında test edilip sonuçların analiz edilmesi
Sistem tasarımlarının elektronik ve elektriksel devreleri proteus ortamında
gerçeklenecektir. Elde edilern sonuçlar değerlendirilecektir. Alternatif
olarak gerçekleme ortamı için orcad ve analiz, grafik işlemleri için matlab
kullanılacaktır.
Sistem sonucunda istenilen sonuçlar alınamamsına karşın fpga teknolojisi
kullanılacaktır.
7
2. TEORİK ALTYAPI
2.1. Genel Bilgiler
Bizim sistemimizde yapılmak istenen amaç görüntü işleme ve yapay zeka teknolojisi
kullanılarak iha nın kontrol yazılımının geliştirilip iha ya entegre edilmesidir. Bu amaç
kapsamında sistemde kontrol istansonundan algılanan el hareketlerinin kablosuz olarak
iha aktarılması hedeflenmiştir, bunun için rf haberleşme sistemi kullanılacaktır.İha
tasarım kısmında kablosuz haberleşme sistemi dc motor, servo motor ve bunların
kontrolünü gerçek zamanlı sağlayan mikrokontrol bulunmaktadır.
Şekil 2.1. Kontrol Ekranı Şekil 2.2. İnsansız Hava Aracı
2.2. Mikrobilgisayar
Mikrobilgisayar terimi merkezi işlem birimi ve bir mikroişlemcisi olan bilgisayardır. Ana
bilgisayarlara göre daha küçüktür. Mikrobilgisayarlara bir ekran ve tuştakımı eklenirse
kişisel bilgisayarlara çok benzerler.
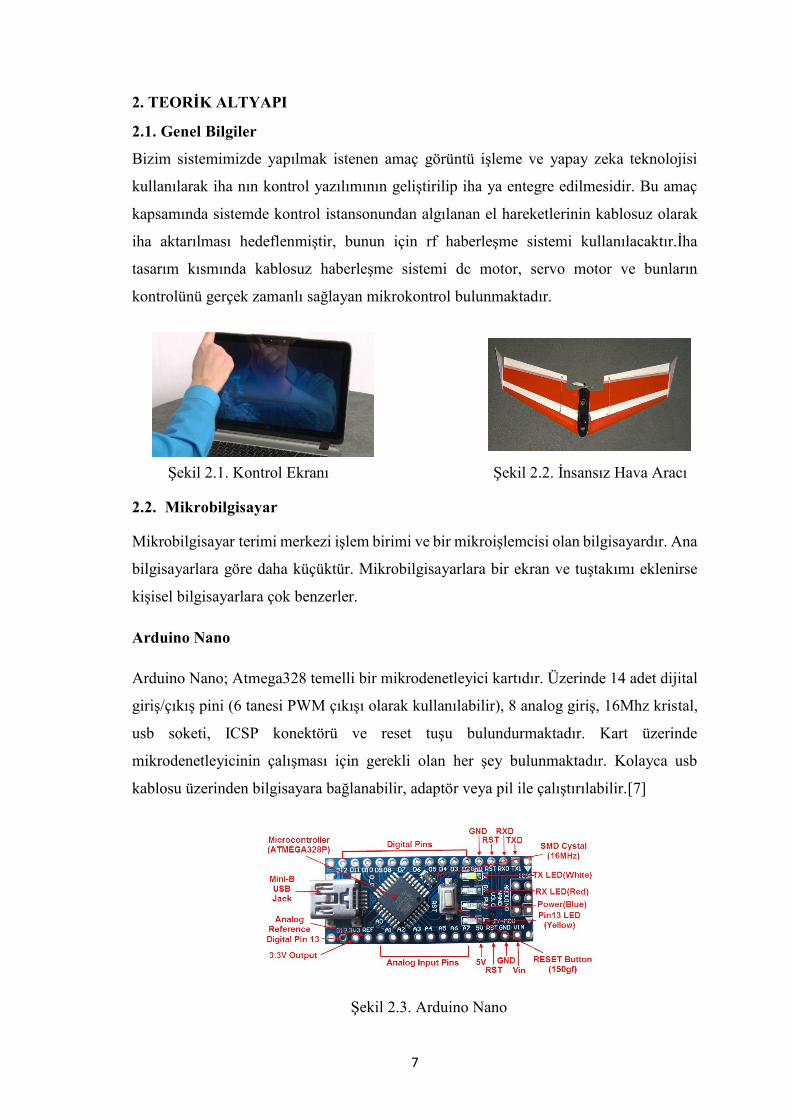
Arduino Nano
Arduino Nano; Atmega328 temelli bir mikrodenetleyici kartıdır. Üzerinde 14 adet dijital
giriş/çıkış pini (6 tanesi PWM çıkışı olarak kullanılabilir), 8 analog giriş, 16Mhz kristal,
usb soketi, ICSP konektörü ve reset tuşu bulundurmaktadır. Kart üzerinde
mikrodenetleyicinin çalışması için gerekli olan her şey bulunmaktadır. Kolayca usb
kablosu üzerinden bilgisayara bağlanabilir, adaptör veya pil ile çalıştırılabilir.[7]
Şekil 2.3. Arduino Nano
8
Teknik Özellikler:
Mikrodenetleyici ATmega328
Çalışma Gerilimi 5V
Giriş Gerilimi (önerilen) 7-12V
Giriş Gerilimi (limit) 6-20V
Dijital I/O Pinleri 14 (6 tanesi PWM çıkışı)
Analog Giriş Pinleri 8
Her I/O için Akım 40 mA
3.3V Çıkış için Akım 50 mA
Flash Hafıza 32 KB (ATmega328) 2 KB kadarı bootloader tarafından kullanılmaktadır.
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Saat Hızı 16 MHz
Uzunluk 45 mm
Genişlik 18 mm
Ağırlık 5mg
Güç:
Arduino Nano gücünü usb üzerinden veya harici güç kaynağından alabilir. Harici güç
kaynağı AC-DC adaptör olabileceği gibi bataryada olabilir. Adaptör ve batarya kart
üzerindeki GND ve Vin pinleri üzerinden bağlanabilir. Kartın çalışması için sürekli
olarak usb'nin bağlı olması şart değildir. Kart sadece adaptör veya batarya ile
çalıştırılabilir. Bu sayede kart bilgisayardan bağımsız olarak çalıştırılabilir. Harici güç
kaynağı olarak 6-20V arası kullanılabilir. Ancak bu değerler limit değerleridir. Kart için
önerilen harici besleme 7-12V arasıdır. Çünkü kart üzerinde bulunan regülatör 7V
altındaki değerlerde stabil çalışmayabilir. 12V üstündeki değerlerde de aşırı
ısınabilir. Nano kartının üzerindeki mikro denetleyicinin çalışma gerilimi 5V'dur. Vin
pini veya güç soketi üzerinden verilen 7-12V arası gerilim kart üzerinde bulunan voltaj
regülatörü ile 5V'a düşürülerek karta dağılır.
9
Güç pinleri aşağıdaki gibidir:
VIN: Harici güç kaynağı kullanılırken 7-12V arası gerilim giriş pini.
5V: Bu pin regülatörden çıkan 5V çıkışı verir. Eğer kart sadece usb (5V) üzerinden
çalışıyor ise usb üzerinden gelen 5V doğrudan bu pin üzerinden çıkış olarak verilir. Aynı
zamanda bu pin üzerinden 5V girişi yapılabilir. Eğer karta güç Vin (7-12V) üzerinden
veriliyorsa regülatörden çıkan 5V doğrudan bu pin üzerinden çıkış olarak verilir.
3V3: Kart üzerinde bulunan 3.3V regülatörü çıkış pinidir. Maks. 50mA çıkış verebilir.
GND: Toprak pinleridir.
Hafıza:
Atmega328 32 KB'lık flash belleğe sahiptir (2 KB kadarı bootloader tarafından
kullanılmaktadır). 2 KB SRAM ve 1 KB EEPROM'u bulunmaktadır.
Giriş ve Çıkış:
Nano üzerindeki 14 adet dijital pinin hepsi giriş veya çıkış olarak kullanılabilir. 8 tane
analog giriş pinide bulunmaktadır. Bu analog giriş pinleride aynı şekilde dijital giriş ve
çıkış olarak kullanılabilir. Yani kart üzerinde toplam 20 tane dijital giriş çıkış pini vardır.
Bu pinlerin tamamının lojik seviyesi 5V'dur. Her pin maks. 40mA giriş ve çıkış akımı ile
çalışır. Ek olarak, bazı pinlerin farklı özellikleri bulunmaktadır. Özel pinler aşağıda
belirtildiği gibidir.Seri Haberleşme, 0 (RX) ve 1 (TX): TTL Seri veri alıp (RX), vermek
(TX) için kullanılır. Bu pinler doğrudan kart üzerinde bulunan FT232 usb-seri
dönüştürücüsüne bağlıdır. Yani bilgisayardan karta kod yüklerken veya bilgisayar-nano
arasında karşılıklı haberleşme yapılırkende bu pinler kullanılır. O yüzden karta kod
yüklerken veya haberleşme yapılırken hata olmaması için mecbur kalınmadıkça bu
pinlerin kullanılmamasında fayda vardır. Harici Kesme, 2 (interrupt 0) ve 3 (interrupt 1):
Bu pinler yükselen kenar, düşen kenar veya değişiklik kesmesi pinleri olarak
kullanılabilir. PWM, 3,5,6,9,10 ve 11: 8-bit çözünürlükte PWM çıkış pinleri olarak
kullanılabilir. SPI, 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK): Bu pinler SPI
haberleşmesi için kullanılır. LED, 13: Nano üzerinden 13. pine bağlı olan dâhili bir led
bulunmaktadır. Pin HIGH yapıldığında led yanacak, LOW yapıldığında led
sönecektir. Analog, A0-A7: Nano 8 tane 10-bit çözünürlüğünde analog giriş pinine
sahiptir. Bu pinler dijital giriş ve çıkış içinde kullanılabilir. Pinlerin ölçüm aralığı 0-
5V'dur. AREF pini ve analogReference() foksiyonu kullanılarak alt limit yükseltilip, üst
10
limit düşürülebilir.I2C, A4 veya SDA pini ve A5 veya SCL pini: Bu pinler I2C
haberleşmesi için kullanılır.
AREF: Analog giriş için referans pini.
Reset: Mikrodenetleyici resetlenmek istendiğinde bu pin LOW yapılır. Reset işlemi kart
üzerinde bulunan Reset Butonu ile de yapılabilir.
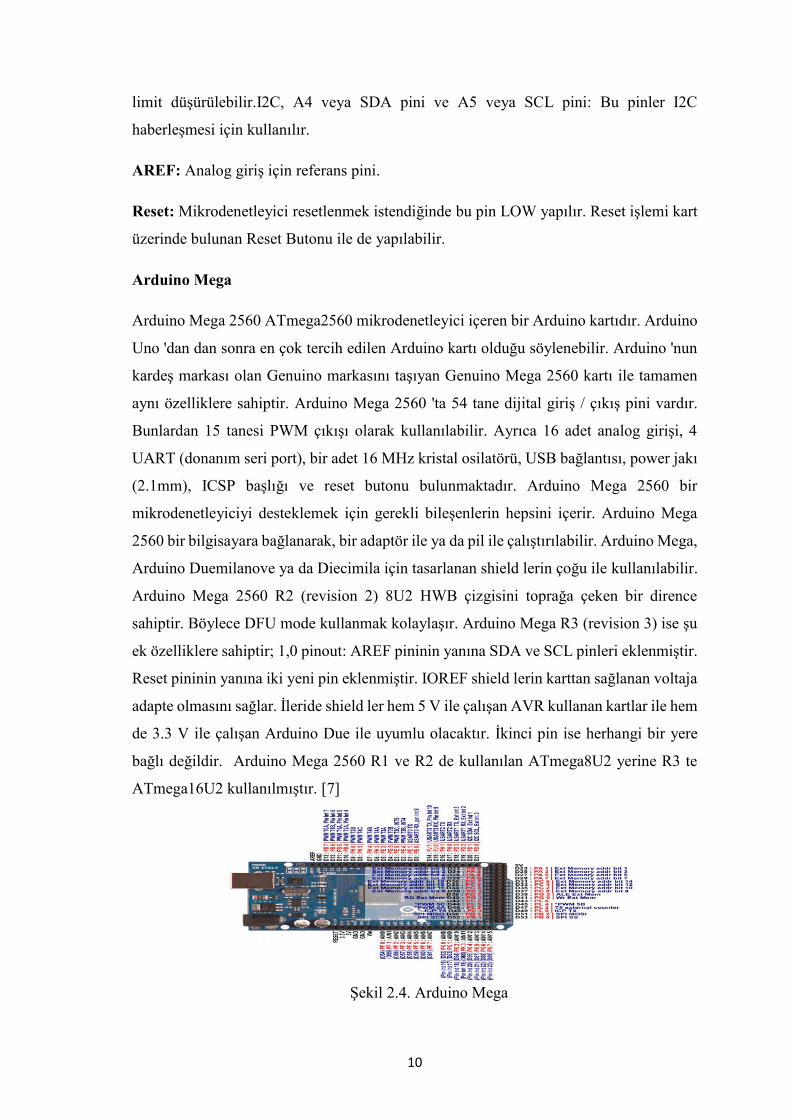
Arduino Mega
Arduino Mega 2560 ATmega2560 mikrodenetleyici içeren bir Arduino kartıdır. Arduino
Uno 'dan dan sonra en çok tercih edilen Arduino kartı olduğu söylenebilir. Arduino 'nun
kardeş markası olan Genuino markasını taşıyan Genuino Mega 2560 kartı ile tamamen
aynı özelliklere sahiptir. Arduino Mega 2560 'ta 54 tane dijital giriş / çıkış pini vardır.
Bunlardan 15 tanesi PWM çıkışı olarak kullanılabilir. Ayrıca 16 adet analog girişi, 4
UART (donanım seri port), bir adet 16 MHz kristal osilatörü, USB bağlantısı, power jakı
(2.1mm), ICSP başlığı ve reset butonu bulunmaktadır. Arduino Mega 2560 bir
mikrodenetleyiciyi desteklemek için gerekli bileşenlerin hepsini içerir. Arduino Mega
2560 bir bilgisayara bağlanarak, bir adaptör ile ya da pil ile çalıştırılabilir. Arduino Mega,
Arduino Duemilanove ya da Diecimila için tasarlanan shield lerin çoğu ile kullanılabilir.
Arduino Mega 2560 R2 (revision 2) 8U2 HWB çizgisini toprağa çeken bir dirence
sahiptir. Böylece DFU mode kullanmak kolaylaşır. Arduino Mega R3 (revision 3) ise şu
ek özelliklere sahiptir; 1,0 pinout: AREF pininin yanına SDA ve SCL pinleri eklenmiştir.
Reset pininin yanına iki yeni pin eklenmiştir. IOREF shield lerin karttan sağlanan voltaja
adapte olmasını sağlar. İleride shield ler hem 5 V ile çalışan AVR kullanan kartlar ile hem
de 3.3 V ile çalışan Arduino Due ile uyumlu olacaktır. İkinci pin ise herhangi bir yere
bağlı değildir. Arduino Mega 2560 R1 ve R2 de kullanılan ATmega8U2 yerine R3 te
ATmega16U2 kullanılmıştır. [7]
Şekil 2.4. Arduino Mega
11
Arduino Mega 2560 Teknik Özellikleri
Mikrodenetleyici: ATmega2560
Çalışma gerilimi : +5 V DC
Tavsiye edilen besleme gerilimi: 7 - 12 V DC
Besleme gerilimi limitleri: 6 - 20 V
Dijital giriş / çıkış pinleri: 54 tane (15 tanesi PWM çıkışını destekler)
Analog giriş pinleri: 16 tane
Giriş / çıkış pini başına düşen DC akım: 40 mA
3,3 V pini için akım: 50 mA
Flash hafıza: 256 KB (8 KB bootloader için kullanılır)
SRAM: 8 KB
EEPROM: 4 KB
Saat frekansı: 16 MHz
Güç
Arduino Mega 2560 bir USB kablosu ile bilgisayar bağlanarak çalıştırılabilir ya da harici
bir güç kaynağından beslenebilir. Harici güç kaynağı bir AC-DC adaptör ya da bir pil /
batarya olabilir. Adaptörün 2.1 mm jaklı ucunun merkezi pozitif olmalıdır ve Arduino
Mega 2560 'ın power girişine takılmalıdır. Pil veya bataryanın uçları ise power
konnektörünün GND ve Vin pinlerine bağlanmalıdır. Arduino Mega 2560 6 V - 20 V
aralığında bir harici güç kaynağı ile beslenebilir. Ancak 7 V altında bir besleme
yapıldığında 5V pini 5 V tan daha düşük çıkış verebilir ve kart kararsız çalışabilir. 12 V
üzerinde bir voltaj beslemesi yapılması durumunda ise regülatör fazla ısınabilir ve karta
zarar verebilir. Bu nedenle tavsiye edilen besleme gerilimi 7 V - 12 V aralığındadır. VIN:
Arduino Mega 2560 kartına harici bir güç kaynağı bağlandığında kullanılan voltaj
girişidir.
5V: Bu pin Arduino kartındaki regülatörden 5 V çıkış sağlar. Kart DC power jakından (2
numaralı kısım) 7-12 V adaptör ile, USB jakından (1 numaralı kısım) 5 V ile ya da VIN
pininden 7-12 V ile beslenebilir. 5V ve 3.3Vpininden voltaj beslemesi regülatörü bertaraf
eder ve karta zarar verir.
3.3V: Arduino kart üzerindeki regülatörden sağlanan 3,3V çıkışıdır. Maksimum 50 mA
dir.
12
GND: Toprak pinidir.
IOREF: Arduino kartlar üzerindeki bu pin, mikrodenetleyicinin çalıştığı voltaj
referansını sağlar. Uygun yapılandırılmış bir shield IOREF pin voltajını okuyabilir ve
uygun güç kaynaklarını seçebilir ya da 3.3 V ve 5 V ile çalışmak için çıkışlarında gerilim
dönüştürücülerini etkinleştirebilir.
Giriş ve Çıkışlar
Arduino Mega 2560 'ta bulunan 54 tane dijital giriş / çıkış pininin tamamı, pinMode(),
digitalWrite() ve digitalRead() fonksiyonları ile giriş ya da çıkış olarak kullanılabilir. Bu
pinler 5 V ile çalışır. Her pin maksimum 40 mA çekebilir ya da sağlayabilir ve 20-50
KOhm dâhili pull - up dirençleri vardır. Ayrıca bazı pinlerin özel fonksiyonları vardır:
Serial: 0 (RX) ve 1 (TX); Serial 1: 19 (RX) ve 18 (TX); Serial 2: 17 (RX) ve 16 (TX);
Serial 3: 15 (RX) ve 14 (TX) : Bu pinler TTL seri data almak (receive - RX) ve yaymak
(transmit - TX) içindir. 0 ve 1 pinleri ayrıca ATmega16U2 USB-to-TTL Si çipinin ilgili
pinlerine bağlıdır. Harici kesmeler 2 (kesme 0), 3 (kesme 1), 18 (kesme 5), 19 (kesme 4),
20 (kesme 3) ve 21 (kesme 2) : Bu pinler bir kesmeyi tetiklemek için kullanılabilir.
PWM: 2 - 13, 44 - 46: Bu pinler analogWrite () fonksiyonu ile 8-bit PWM sinyali sağlar.
SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS) : Bu pinler SPI kütüphanesi ile SPI
haberleşmeyi sağlar.
TWI : 20 SDA 21 SCL : Wire kütüphanesini kullanarak TWI haberleşmesini destekler.
(Bu pinlerin yeri Arduino Duemilanove ve Diecimila kartlardaki ile aynı
değildir.)Arduino Mega 2560 'ın 16 tane analog girişinden her biri 10 bit çözünürlüğü
destekler. Varsayılan ayarlarda topraktan 5V’a kadar ölçerler. Ancak, AREF pini ve
analogReference() fonksiyonu kullanılarak üst limit ayarlanabilir.
AREF : Analog girişler için referans voltajıdır. analogReference() fonksiyonu ile
kullanılır.
RESET : Mikrodenetleyiciyi resetlemek içindir. Genellikle shield üzerine reset butonu
eklemek için kullanılır.
13
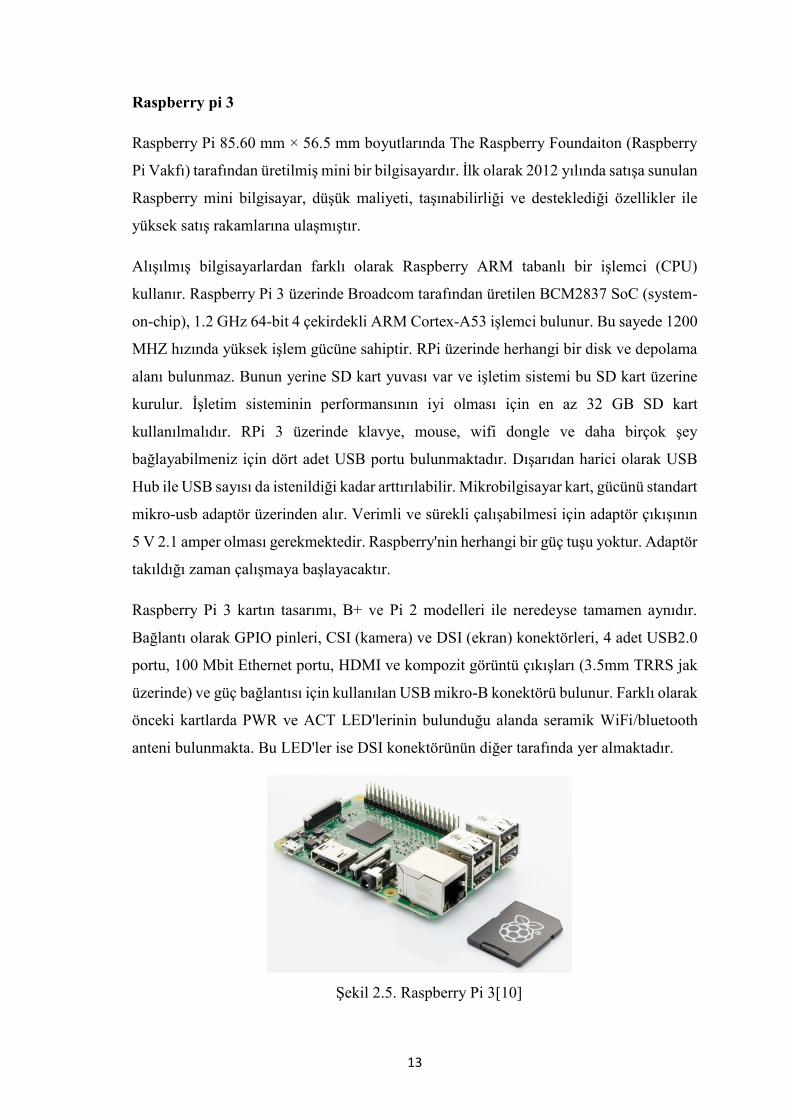
Raspberry pi 3
Raspberry Pi 85.60 mm × 56.5 mm boyutlarında The Raspberry Foundaiton (Raspberry
Pi Vakfı) tarafından üretilmiş mini bir bilgisayardır. İlk olarak 2012 yılında satışa sunulan
Raspberry mini bilgisayar, düşük maliyeti, taşınabilirliği ve desteklediği özellikler ile
yüksek satış rakamlarına ulaşmıştır.
Alışılmış bilgisayarlardan farklı olarak Raspberry ARM tabanlı bir işlemci (CPU)
kullanır. Raspberry Pi 3 üzerinde Broadcom tarafından üretilen BCM2837 SoC (system-
on-chip), 1.2 GHz 64-bit 4 çekirdekli ARM Cortex-A53 işlemci bulunur. Bu sayede 1200
MHZ hızında yüksek işlem gücüne sahiptir. RPi üzerinde herhangi bir disk ve depolama
alanı bulunmaz. Bunun yerine SD kart yuvası var ve işletim sistemi bu SD kart üzerine
kurulur. İşletim sisteminin performansının iyi olması için en az 32 GB SD kart
kullanılmalıdır. RPi 3 üzerinde klavye, mouse, wifi dongle ve daha birçok şey
bağlayabilmeniz için dört adet USB portu bulunmaktadır. Dışarıdan harici olarak USB
Hub ile USB sayısı da istenildiği kadar arttırılabilir. Mikrobilgisayar kart, gücünü standart
mikro-usb adaptör üzerinden alır. Verimli ve sürekli çalışabilmesi için adaptör çıkışının
5 V 2.1 amper olması gerekmektedir. Raspberry'nin herhangi bir güç tuşu yoktur. Adaptör
takıldığı zaman çalışmaya başlayacaktır.
Raspberry Pi 3 kartın tasarımı, B+ ve Pi 2 modelleri ile neredeyse tamamen aynıdır.
Bağlantı olarak GPIO pinleri, CSI (kamera) ve DSI (ekran) konektörleri, 4 adet USB2.0
portu, 100 Mbit Ethernet portu, HDMI ve kompozit görüntü çıkışları (3.5mm TRRS jak
üzerinde) ve güç bağlantısı için kullanılan USB mikro-B konektörü bulunur. Farklı olarak
önceki kartlarda PWR ve ACT LED'lerinin bulunduğu alanda seramik WiFi/bluetooth
anteni bulunmakta. Bu LED'ler ise DSI konektörünün diğer tarafında yer almaktadır.
Şekil 2.5. Raspberry Pi 3[10]

14
Raspberry Pi 3 Mikrobilgisayar Teknik Özellikleri:
Broadcom BCM2837 SoC1.2 GHz 4 çekirdekli 64-bit ARM Cortex-A53 işlemci
2 çekirdekli Videocore IV® Multimedia işlemcisi
1 GB LPDDR2 bellek
Dâhili 802.11b/g/n destekli WiFi
Bluetooth 4.1, low-energy destekli
10/100 Mbit destekli Ethernet portu
HDMI portu (HDMI 1.4 destekli)
Kompozit video ve ses çıkışı için 3.5mm TRRS (4 uçlu) konektör
4 adet USB2.0 portu
40 adet GPIO pini, önceki Raspberry Pi modelleri ile uyumlu
WiFi/Bluetooth için dahili çip anten
CSI (kamera) ve DSI (ekran) konektörleri
Mikro SD kart yuvası
Tüm Raspberry Pi uyumlu Linux dağıtımlarını ve Windows 10 IoT Core işletim
sistemini destekler.
Boyutlar: 85 x 56 x 17 mm
2.3. Motorlar
2.3.1 Servo Motor
Servo motorlar gönderilen kodlanmış sinyaller ile şaftları özel bir açısal pozisyonda
döndürülebilen motorlardır. Kodlanmış sinyal servo motorun girşine uygulandığı sürece
servo motor şaftın açısal pozisyonunu korur. Kodlanmış sinyal değiştirilirse şaftın açısal
pozisyonu da değişir. Servo motorlar çeşitli robot projelerinde, robot kollarda, uzaktan
kumandalı uygulamalarda sıklıkla kullanılır. Aynı zamanda yüksek güçlü servo motorlar
endüstriyel otomasyonlarda da kullanılabilir.
Şekil 2.6. Servo İç Yapısı

15
Bir servo motorun temel konfigürasyonu şekilde gösterilmektedir. Bir DC motor yüksek
redüksiyon oranına sahip bir dişli kutusunu hareket ettirir. Sondaki şaft çok yavaş bir
hızla dönerek dönme ekseni üzerindeki potansiyometreyi de çevirir. Potansiyometrenin
amacı geri besleme yaparak servo motorun şaftının pozisyonun algılanmasını
sağlamaktır. Potansiyometre algılanan pozisyona karşılık gelen voltajı, voltaj
karşılaştırıcısı olarak kullanılan opampa gönderir. Bu voltaj değerinin, şaftın istenilen
pozisyonunu belirleyen giriş voltajı ile karşılaştırılması ile karşılaştırcının çıkış voltajı
belirlenir. Bu çıkış voltajı, motor şaftını girişte uygulanan sinyala karşılık gelen açuya
uyması için gerekli yönde hareket ettirecek gücü sağlar.
Standart Konfigürasyon:
Bir servo motorun şaftının pozisyonunu kontrol etmenin bir diğer yolu kodlanmış bir
sinyal kullanmaktır. Bu metot uzaktan kumandalı uygulamalarda kullanılan standart
servolarda sıklıkla kullanılır. Servonun kontrol girişine 18 ms periyotlu palslardan oluşan
bir sinyal gönderilir. Palsın süresi servo motorun şaftının 180º 'lik bir aralıktaki
pozisyonunu belirler. Eğer pals 1,5 ms uzunluğunda ise servo motorun şaftının pozisyonu
180 º 'lik aralığın ortasındadır. Pals 1 ms uzunlukta ise servo motor 90 º sola, 2 ms
uzunlukta ise 90 º sağa hareket eder.Bazı servo motorların pals uzunluğu 1,25 ms ile 1,75
ms arasındadır. Bu durumda pals uzunluğu 1,5 ms iken servo motor şaftı ortadadır. Pals
uzunluğu 1,25 ms iken 90 º sola, 1,75 ms iken ise 90 º sağa hareket eder.
Servo Motor Çeşitleri:
Standart servo motorların üç kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında),
biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için
kırmızı, toprak için siyah ve kontrol için beyazdır.Servo motorların boyutları ve şekilleri
planlanan uygulamaya bağlıdır. Yandaki resimdeki servo motor ve benzerleri robotikte
sık kullanılan servo motor tipleridir. Bunlar düşük güçte çalışabilir, kullanılan servo
motorun karakteristik özelliklerine ve uygulamaya bağlı olarak 100 mA ile 2A
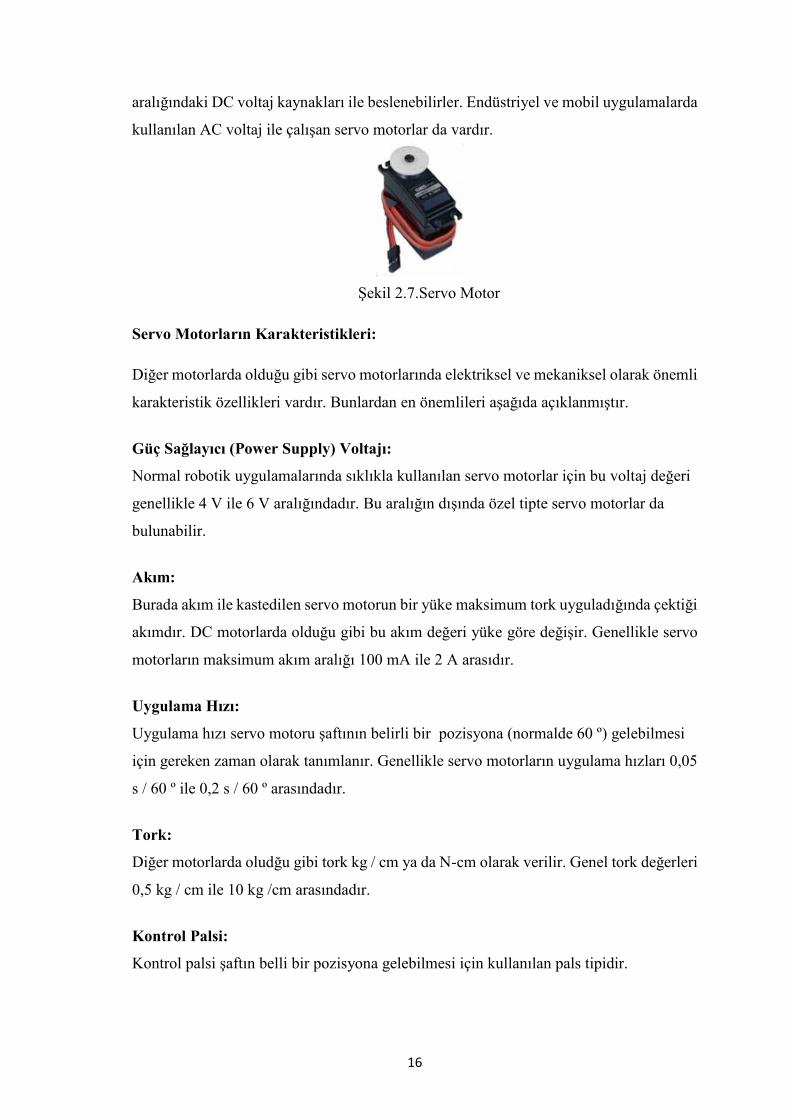
16
aralığındaki DC voltaj kaynakları ile beslenebilirler. Endüstriyel ve mobil uygulamalarda
kullanılan AC voltaj ile çalışan servo motorlar da vardır.
Şekil 2.7.Servo Motor
Servo Motorların Karakteristikleri:
Diğer motorlarda olduğu gibi servo motorlarında elektriksel ve mekaniksel olarak önemli
karakteristik özellikleri vardır. Bunlardan en önemlileri aşağıda açıklanmıştır.
Güç Sağlayıcı (Power Supply) Voltajı:
Normal robotik uygulamalarında sıklıkla kullanılan servo motorlar için bu voltaj değeri
genellikle 4 V ile 6 V aralığındadır. Bu aralığın dışında özel tipte servo motorlar da
bulunabilir.
Akım:
Burada akım ile kastedilen servo motorun bir yüke maksimum tork uyguladığında çektiği
akımdır. DC motorlarda olduğu gibi bu akım değeri yüke göre değişir. Genellikle servo
motorların maksimum akım aralığı 100 mA ile 2 A arasıdır.
Uygulama Hızı:
Uygulama hızı servo motoru şaftının belirli bir pozisyona (normalde 60 º) gelebilmesi
için gereken zaman olarak tanımlanır. Genellikle servo motorların uygulama hızları 0,05
s / 60 º ile 0,2 s / 60 º arasındadır.
Tork:
Diğer motorlarda oludğu gibi tork kg / cm ya da N-cm olarak verilir. Genel tork değerleri
0,5 kg / cm ile 10 kg /cm arasındadır.
Kontrol Palsi:
Kontrol palsi şaftın belli bir pozisyona gelebilmesi için kullanılan pals tipidir.
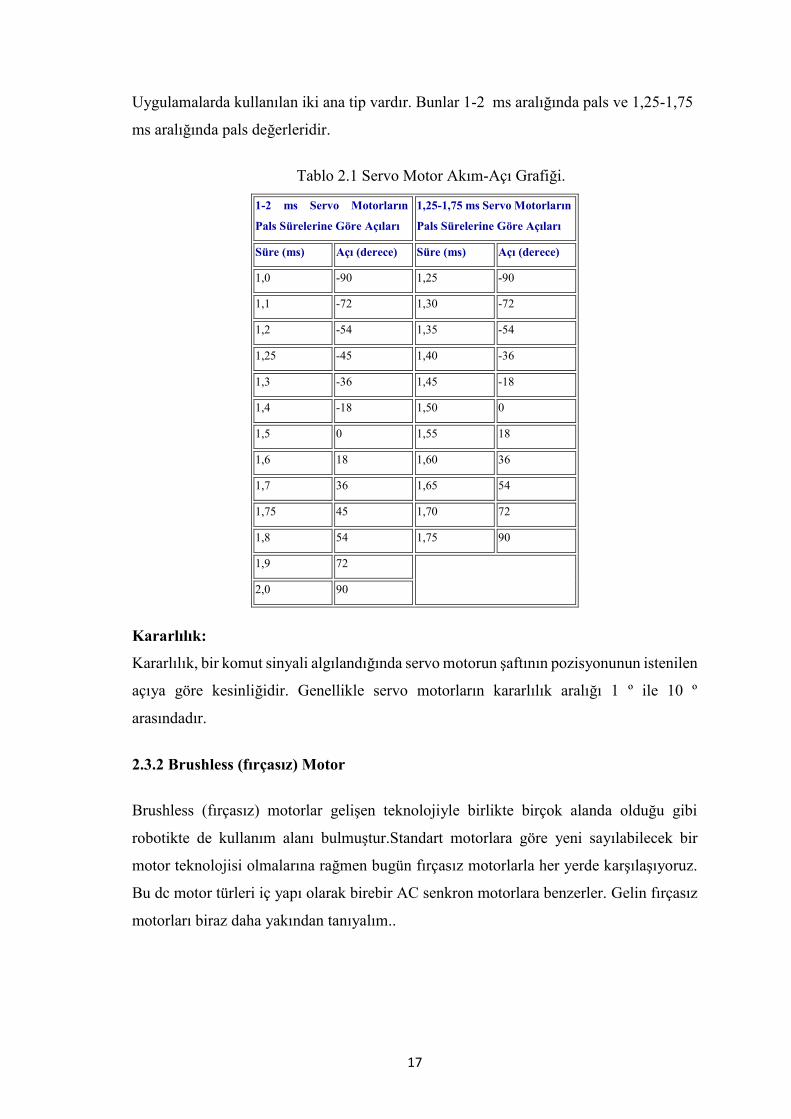
17
Uygulamalarda kullanılan iki ana tip vardır. Bunlar 1-2 ms aralığında pals ve 1,25-1,75
ms aralığında pals değerleridir.
Tablo 2.1 Servo Motor Akım-Açı Grafiği.
1-2 ms Servo Motorların
Pals Sürelerine Göre Açıları
1,25-1,75 ms Servo Motorların
Pals Sürelerine Göre Açıları
Süre (ms) Açı (derece) Süre (ms) Açı (derece)
1,0 -90 1,25 -90
1,1 -72 1,30 -72
1,2 -54 1,35 -54
1,25 -45 1,40 -36
1,3 -36 1,45 -18
1,4 -18 1,50 0
1,5 0 1,55 18
1,6 18 1,60 36
1,7 36 1,65 54
1,75 45 1,70 72
1,8 54 1,75 90
1,9 72
2,0 90
Kararlılık:
Kararlılık, bir komut sinyali algılandığında servo motorun şaftının pozisyonunun istenilen
açıya göre kesinliğidir. Genellikle servo motorların kararlılık aralığı 1 º ile 10 º
arasındadır.
2.3.2 Brushless (fırçasız) Motor
Brushless (fırçasız) motorlar gelişen teknolojiyle birlikte birçok alanda olduğu gibi
robotikte de kullanım alanı bulmuştur.Standart motorlara göre yeni sayılabilecek bir
motor teknolojisi olmalarına rağmen bugün fırçasız motorlarla her yerde karşılaşıyoruz.
Bu dc motor türleri iç yapı olarak birebir AC senkron motorlara benzerler. Gelin fırçasız
motorları biraz daha yakından tanıyalım..

18
Kullanım alanları
Bu motorlar özellikle Hobi radyo kontrollü projeler için sıkça kullanılırlar. Birim enerji
yoğunlukları daha iyi olduğu için RC arabalarda, Helikopterlerde… Yüksek performans
için fırçasız motorlar tercih edilmektedir.Brushless motorların genel fırçalı motorlara
göre birçok avantajı ve dezavantajı vardır.
Dezavantajları
Pahalı sistemler
Kompleks Kontrol
Isınma
Avantajları
Sessiz çalışma
Elektriksel gürültü oluşturmaması
Bakım kolaylığı
Uzun Ömür Şekil 2.8. Brushless Motor.
Daha yüksek hızlar
Daha çok tork
2.4. DHT-11 Sicaklik ve Nem Sensörü
DHT-11, dijital bir sıcaklık ve nem sensörüdür. Çevresindeki havayı ölçmek için
içerisindeki kapasitif nem sensörünü ve termistörü kullanır. Bu sensörlerin verilerini
dijital çıkış pinine aktarır. Sensör, 2 saniyede bir çıkış verir.
Şekil 2.9 DHT-11 Sicaklik ve Nem Sensörü.
Teknik Özellikler:
• 3-5V giriş-çıkış voltajı
• Maksimum 2.5mA çalışma akımı
• %20-80 nem oranı için %5 hassasiyet
• 0-50°C derece sıcaklık için ±2°C hassasiyet
• Ölçüler: 15.5mm x 12mm x 5.5mm
• 2.54mm pin aralığı

19
DHT11 Sıcaklık-Nem Sensörünün Özellikleri ve Kullanımı
DHT11, dijital sinyal çıkısı ve sıcaklık-nem sensörü birimlerini bulunduran bir sensördür.
Sensör içerisinde direnç ile nem ölçüm bileşeni ve NTC Sıcaklık ölçüm bileşeni
bulunmaktadır. Özel bir dijital sinyal üretip bunu tek hat üzerinden seri olarak
iletmektedir. Bu hat çift yönlü seri iletim yapabilmektedir. Sensör doğru bağlanmış ise
sensörün data pinine bağlı olan pin en az 18 ms boyunca “0” ardından 20-40 us boyunca
“1” yapılır. Daha sonra bu pin giriş pini olarak ayarlanır. Eğer 80 us boyunca “0” ve yine
80 us boyunca “1” geliyorsa sensör doğru bağlanmış ve veri transferine başlamış
demektir.
DHT11 toplam 40 bitlik(5 byte) bir veri gönderir.
1. byte nem değerinin tam sayı kısmını,
2. byte nem değerinin ondalıklı kısmını,
3. byte sıcaklık değerinin tam sayı kısmını,
4. byte ise sıcaklığın ondalıklı kısmını ifade eder.
Eğer veri iletimi doğru bir şekilde tamamlandıysa, 5. byte ilk 4 byte toplamına eşittir. Her
bitin gönderiminden önce 50us lik bir bekleme süresi vardır. Bu sürenin ardından gelen
sinyal 26 – 28us arasında sürüyor ise bu bit değeri olarak “0” ‘ı, 70us sürüyor ise bit
değeri olarak “1”‘i ifade eder.
DHT11, 0 – 50 ℃ arasında sıcaklık ölçümü yapabilmektedir. +-%2 lik hata payı vardır.
DHT11, %20 -% 90 arası nem ölçümü gerçekleştirebilmektedir. Nem hata payı ise +- %5
dır.DHT11’i Arduino ile kullanacaksak yukarıdaki bilgileri kullanmamıza gerek
duymadan programla yapabiliriz. Çünkü hazır kütüphaneler bizim için bu bilgileri işleyen
fonksiyonlara sahipler.Eğer DHT11’i FPGA ile kullanacaksak yukarıdaki bilgileri en ince
ayrıntısına kadar bilmemiz gerekmektedir. [8]
2.5. LM35 Sıcaklık Sensörü
National Semiconductor firmasının üretmiş olduğu LM35 sıcaklık sensörü bulunduğu
ortamdaki sıcaklığı algılar ve algıladığı sıcaklığı, belirli bir katsayı ile çarparak çıkış
gerilimi olarak aktaran, santigrat tipi derece ile çalışan bir sıcaklık algılayıcısıdır.
Santigrat tabanlı ölçüm yapması nedeniyle kullanım kolaylığı sağlar ve bu projede
ullanılmasının nedenlerinden biri budur. Ayrıca düşük güç gereksinimi nedeniyle uzaktan
kontrollü uygulamalarda LM35 tercih edilmektedir.LM35 her 1 °C sıcaklık artışında çıkış
gerilimini 10mV artırmaktadır. Besleme gerilimi 4 Volt ile 30 Volt arasında
seçilebilmektedir. Bu projede besleme gerilimi 5 Volt olarak seçilmiştir. -55 °C ile + 150
20
°C arasında sıcaklık ölçümü yapabilen devre, oda sıcaklığı civarında en fazla ± 0.5 °C
hatalı ölçüm yapabileceği, üretici firma tarafından garanti edilmektedir. Ayrıca yapılan
deneylerde de bu hata payı doğrulanmıştır. Güç tüketimi, devre şeması ve diğer algılayıcı
modelleri gibi ek bilgilere ulaşmak için devrenin kataloğu incelenmelidir.
Şekil 2.10. LM35 Sıcaklık Sensörü.
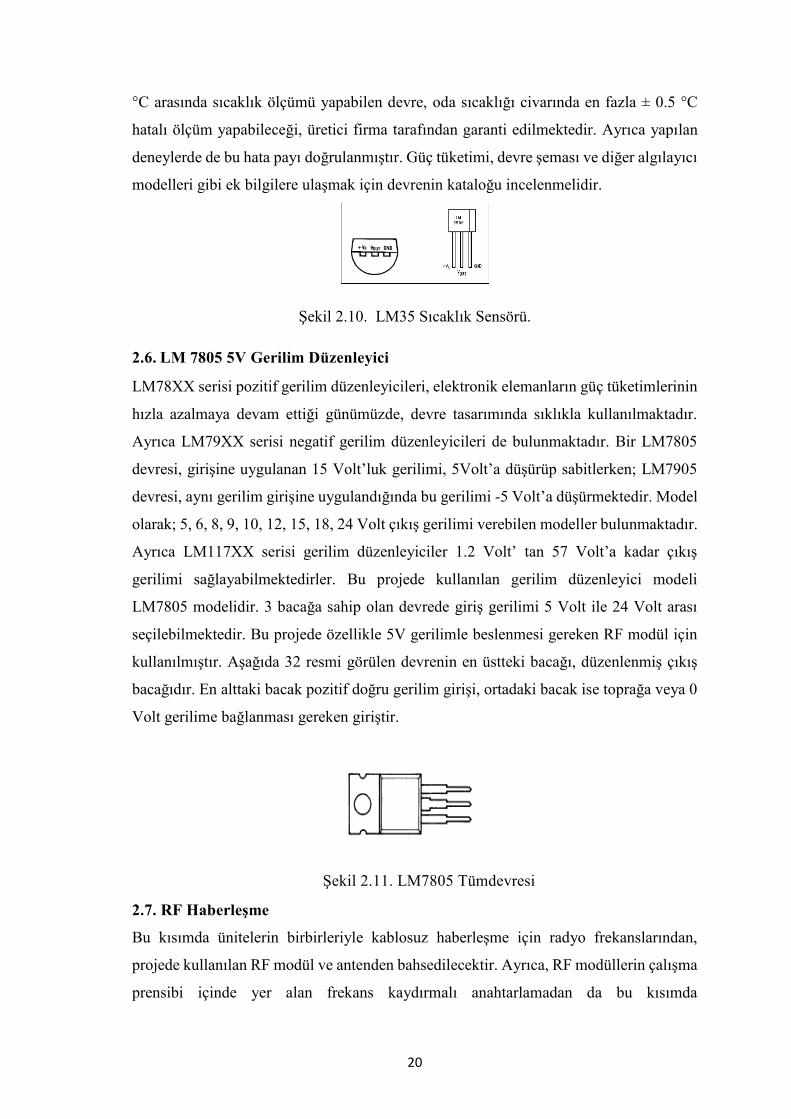
2.6. LM 7805 5V Gerilim Düzenleyici
LM78XX serisi pozitif gerilim düzenleyicileri, elektronik elemanların güç tüketimlerinin
hızla azalmaya devam ettiği günümüzde, devre tasarımında sıklıkla kullanılmaktadır.
Ayrıca LM79XX serisi negatif gerilim düzenleyicileri de bulunmaktadır. Bir LM7805
devresi, girişine uygulanan 15 Volt’luk gerilimi, 5Volt’a düşürüp sabitlerken; LM7905
devresi, aynı gerilim girişine uygulandığında bu gerilimi -5 Volt’a düşürmektedir. Model
olarak; 5, 6, 8, 9, 10, 12, 15, 18, 24 Volt çıkış gerilimi verebilen modeller bulunmaktadır.
Ayrıca LM117XX serisi gerilim düzenleyiciler 1.2 Volt’ tan 57 Volt’a kadar çıkış
gerilimi sağlayabilmektedirler. Bu projede kullanılan gerilim düzenleyici modeli
LM7805 modelidir. 3 bacağa sahip olan devrede giriş gerilimi 5 Volt ile 24 Volt arası
seçilebilmektedir. Bu projede özellikle 5V gerilimle beslenmesi gereken RF modül için
kullanılmıştır. Aşağıda 32 resmi görülen devrenin en üstteki bacağı, düzenlenmiş çıkış
bacağıdır. En alttaki bacak pozitif doğru gerilim girişi, ortadaki bacak ise toprağa veya 0
Volt gerilime bağlanması gereken giriştir.
Şekil 2.11. LM7805 Tümdevresi
2.7. RF Haberleşme
Bu kısımda ünitelerin birbirleriyle kablosuz haberleşme için radyo frekanslarından,
projede kullanılan RF modül ve antenden bahsedilecektir. Ayrıca, RF modüllerin çalışma
prensibi içinde yer alan frekans kaydırmalı anahtarlamadan da bu kısımda

21
bahsedilecektir. Kablosuz (RF) Teknoloji 3 Hz ile 300 GHz spektrum içerisinde
elektromanyetik dalgaların işletilmesidir. Elektromanyetik dalgaların varlığı ilk olarak
1864 yılında James Maxwell tarafından öne sürüldü. 1887 yıllında Heinrich Hertz
tarafından varlığı kanıtlandı. 1895 yılında Guglielmo Marconi tarafından icat edilen
radyo ile birlikte iletişim için kullanılabilecek bir teknoloji olduğu ortaya çıktı.Kapalı bir
sitemin elektrik enerjisiyle yüklenmesi sonucu oluşan statik bir elektrik alanda, bir
değişim söz konusu olduğunda, elektromanyetik dalga oluşur. Bu dalganın şiddeti (E),
ana kaynaktan olan mesafesinin karesi ile ters orantılı (E ά R-2) bir zayıflama ile yayılır.
Şekil 2.12 Elektromanyetik Dalga Yayılımı
Esas olarak teori: Yükleme sisteminin, oluşan alanın bilgi taşıyabilmesi için düzgün
aralıklarla elektromanyetik dalga oluşturabilecek şekilde modüle edilmesidir. Bu
dalgaların başka bir kapalı sisteme ulaştıklarında, o sistem içerisinde oluşturdukları
değişimin algılanmasıdır. RF kablosuz ve yüksek frekans sinyallerle eş anlamlıdır. RF,
535kHz ile 1605kHz AM radyo frekanslarından 2.4GHzlik yerel ağ (LAN) frekanslarına
kadar tanımlanır. RF normalde birkaç kHz’den kabaca 1GHz’e kadar tanımlanır. Eğer
mikrodalga frekanslarıda düşünülürse bu aralık 300GHz’e kadar ulaşır. Aşağıdaki tabloda
radyo frekansının frekans spektrumu gösterilmektedir.
Tablo 2.1. Frekans Spektrumu
Yukarıdaki tabloda radyo dalgalarının elektromanyetik spektrum üzerindeki
frekansdağılımları ve isimlendirilmiş bant aralıkları gösterilmiştir. Haberleşme
uygulamalarında bu bantların sadece belirli bölümleri kullanılmaktadır. Bunlardan ISM
(Industrial Scientific Medical Band) bandı birçok ülkede telsiz iletişimi için sertifika veya
22
lisansa gerek olmadan belirli bir çıkış gücü sınırlamasına uyarak, üzerinden yayın
yapılabilen bir banttır. Ülkemizde ISM bandının yaygın olarak kullanılan frekansları
315MHz, 418 MHz, 433,93 MHz, 868 MHz, 915 MHz ve 2.5 GHz frekanslarıdır. Bu
projede 868 MHz frekansı kullanılmıştır. Yukarıdaki şekilden frekans ile dalgaboyu
arasındaki ilişkide gözlemlenebilmektedir. Dalga ya da sinüsoidal tamamen dalgaboyu
ya da frekansı ile tanımlanabilir. Dalgaboyu ile frekans arasında ters orantılıdır ve normal
ortamda hızları ışık hızıyla orantılıdır. Bu ilişkiyi gösteren denklem aşağıdaki gibidir.
Burada c ışık hızıdır. Dalgaboyu ile frekansın arasındaki ters orantıdan dalgaboyu arttıkça
frekans azalmaktadır.
Tablo 2.2. Mikrodalga Frekansları Harf Bant Dağılımı
RF modüller belirli sabit bir frekansta çalışacak şekilde üretilmişlerdir ve alıcı verici
çiftleri halinde satılmaktadır. Kullanımları kolaydır. Devreye sadece bir anten ekleyerek
çalıştırılabilirler. Ayrıca bir diğer avantajı ise düşük güç tüketmesidir. Bu sayede
taşınabilen sistem uygulamalarında kullanışlıdır.
RF Ölçüm
RF ölçüm metadolojisi genel olarak üç büyük kısma ayrılır. Bunlar spektral analiz, vektör
analiz ve network analizdir. Spektrum analizör temel ölçüm yeterliliklerini sağlar. Birçok
genel amaçlı uygulamada en popüler RF ölçüm tipidir. Belirli bir biçimde spektrum
analizör kullanarak güç frekans bilgisi alınabilir ve bazen analog formata demodülasyonu
yapılabilir. Örneğin, genlik modülasyonu (AM), frekans modülasyonu (FM) ve faz
modülasyonu (PM).Vektör cihazları, vektör ya da gerçek zamanlı sinyal analizörü ve
jeneratörünüde içerir. Bu cihazlar analiz yapar, zamanı yakalar, genişbant dalga formu
oluşturur, ilgili sinyalin frekans, faz ve güç bilgisini yakalar. Bu cihazlar spektrum
analizöre göre daha güçlüdür ve mükemmel modülasyon kontrolü ve sinyal analizi sağlar.
Bir diğer yandan network analizörler yüksek frekans bileşenleri için ya da RF’de tipik
23
olarak S parametrelerinin ölçümü için ve diğer karakteristik ölçümler için kullanılırlar.
Network analizör çoklu kanallarda analiz ve jeneratörün ikisini beraber barındırır. Fakat
network analizör diğer ikisinden daha pahalıdır.
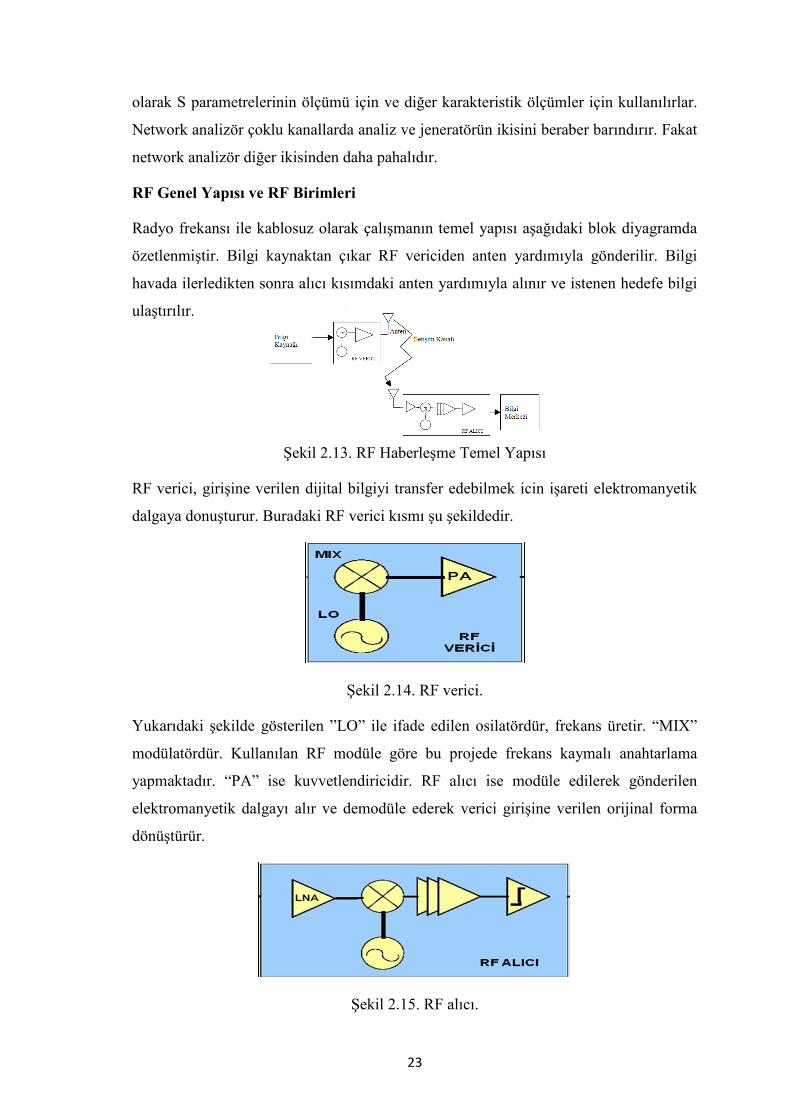
RF Genel Yapısı ve RF Birimleri
Radyo frekansı ile kablosuz olarak çalışmanın temel yapısı aşağıdaki blok diyagramda
özetlenmiştir. Bilgi kaynaktan çıkar RF vericiden anten yardımıyla gönderilir. Bilgi
havada ilerledikten sonra alıcı kısımdaki anten yardımıyla alınır ve istenen hedefe bilgi
ulaştırılır.
Şekil 2.13. RF Haberleşme Temel Yapısı
RF verici, girişine verilen dijital bilgiyi transfer edebilmek icin işareti elektromanyetik
dalgaya donuşturur. Buradaki RF verici kısmı şu şekildedir.
Şekil 2.14. RF verici.
Yukarıdaki şekilde gösterilen ”LO” ile ifade edilen osilatördür, frekans üretir. “MIX”
modülatördür. Kullanılan RF modüle göre bu projede frekans kaymalı anahtarlama
yapmaktadır. “PA” ise kuvvetlendiricidir. RF alıcı ise modüle edilerek gönderilen
elektromanyetik dalgayı alır ve demodüle ederek verici girişine verilen orijinal forma
dönüştürür.
Şekil 2.15. RF alıcı.

24
Yukarıdaki şekilde gosterilen “LNA” duşuk gurultulu kuvvetlendiricidir. Gelen sinyal
demodule edildikten sonra integral alıcı devreye gonderilir ve işaret ilk formatına
cevrilerek hedefe iletilir.
2.8 Real-Time Clock RTC (Gerçek Zamanlı Saat) DS1307
Umumiyetle RTC olarak kısaltılmış bir şekilde bahsedilen bu devrelerin kullanım alanları
oldukça geniştir. Bilgisayar kasasının kapağını bir şekilde açmış herkesin bildiği gibi
anakartın üzerinde bulunan pilden kollarımızdaki dijital saatlere kadar çok geniş bir
alanda bu entegreler kullanılmaktadır. Bu entegreler dijital saat olarak çalışmakta ve
“Saat kaç” sorusuna doğru bir şekilde cevap verebilmekteler. Arduino kartıyla
yapabileceğimiz alarmlı dijital saat devresi, veri günlüğü kaydedici veya bir meteroloji
istasyonu için vazgeçilemez parçalardan biri olacaktır.
Şekil 2.16. RTC DS1307
Aslında birer mikrokontrolcü gibi içlerinde işlem birimi, ram, registerler ve veri yolu
arabirimi vardır. “Saat” gibi çalışması için 32.768 kHz hızında bir Kristal osilatör
kullanılır. Bu frekans saatin doğru çalışması için çok önemlidir. DS1307 gibi RTCler I2C
seri veriyolu ile mikroişlemciler veya mikrokontrolcülerle iletişime geçer. Bir sıra halinde
verileri gönderir. O sıraya göre hangi ay hangi yıl hangi gün hangi saat mikrokontrolcüler
tarafından yorumlanıp kullanılmak üzere kaydedilir. İlk değer kaydedileceği zaman da
mikrokontrolcü tarafından veriler RTC’nin içerisine yazılır. İlk değeri doğru bir şekilde
verdiğiniz zaman yüksek hassasiyetle uzun süre (hatta yıllarca) RTC’nizi
çalıştırabilirsiniz çünkü çok düşük güç tüketir. Bazı RTC entegrelerinde Alarm ve
karedalga çıkışı da bulunur. Böylece ayrıca sesli alarm devresi kurmanıza gerek kalmaz.
DS1307 Nasıl Çalıştırılır?
DS1307 Bizim ihtiyacımız olan tüm zaman işlemlerini yapmaktadır saniye, dakika, saat,
gün, ay, haftanın günü, yıl ve hatta şubatın artık gününü de hesaplamaktadır. Üzerindeki
RAM sınırsız okuma-yazma imkanı sağlamaktadır bilindiği gibi EEPROMlar genellikle
25
10 bine kadar okuma-yazma kapasitesine sahiptir. I2C seri iletişim arabirimi ile
mikrokontrolcülerle iletişime geçebilir. 500nA ‘a kadar düşük pil tüketimi ile tek bir
düğme pil yıllarca yeterli kalır.Örnek devremizi en sık kullanılan ds1307 üzerinden
gösteriyoruz. İhtiyaca göre oldukça çeşitli entegreler bulabilirsiniz.
Entegreyi çalıştırmak için bir kaç elektronik parça gerekmektedir. Bunları bulmak pek
zor değildir. Aşağıda listelenmiştir.
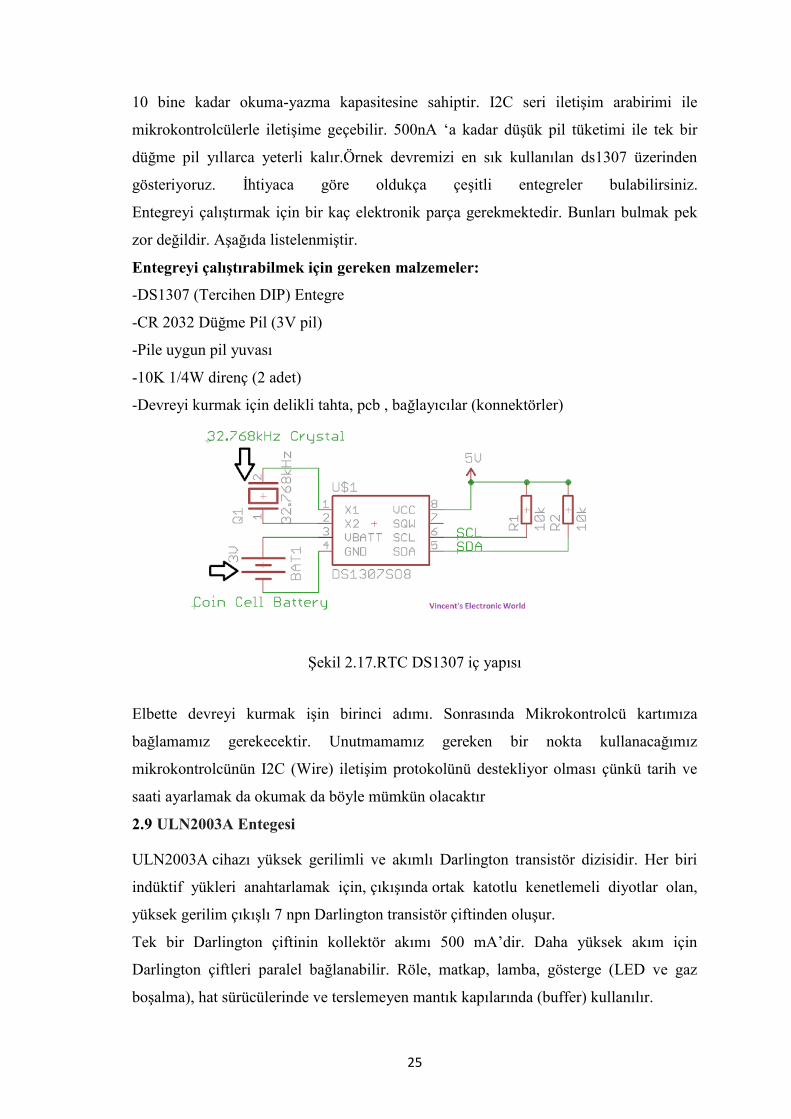
Entegreyi çalıştırabilmek için gereken malzemeler:
-DS1307 (Tercihen DIP) Entegre
-CR 2032 Düğme Pil (3V pil)
-Pile uygun pil yuvası
-10K 1/4W direnç (2 adet)
-Devreyi kurmak için delikli tahta, pcb , bağlayıcılar (konnektörler)
Şekil 2.17.RTC DS1307 iç yapısı
Elbette devreyi kurmak işin birinci adımı. Sonrasında Mikrokontrolcü kartımıza
bağlamamız gerekecektir. Unutmamamız gereken bir nokta kullanacağımız
mikrokontrolcünün I2C (Wire) iletişim protokolünü destekliyor olması çünkü tarih ve
saati ayarlamak da okumak da böyle mümkün olacaktır
2.9 ULN2003A Entegesi
ULN2003A cihazı yüksek gerilimli ve akımlı Darlington transistör dizisidir. Her biri
indüktif yükleri anahtarlamak için, çıkışında ortak katotlu kenetlemeli diyotlar olan,
yüksek gerilim çıkışlı 7 npn Darlington transistör çiftinden oluşur.
Tek bir Darlington çiftinin kollektör akımı 500 mA’dir. Daha yüksek akım için
Darlington çiftleri paralel bağlanabilir. Röle, matkap, lamba, gösterge (LED ve gaz
boşalma), hat sürücülerinde ve terslemeyen mantık kapılarında (buffer) kullanılır.
26
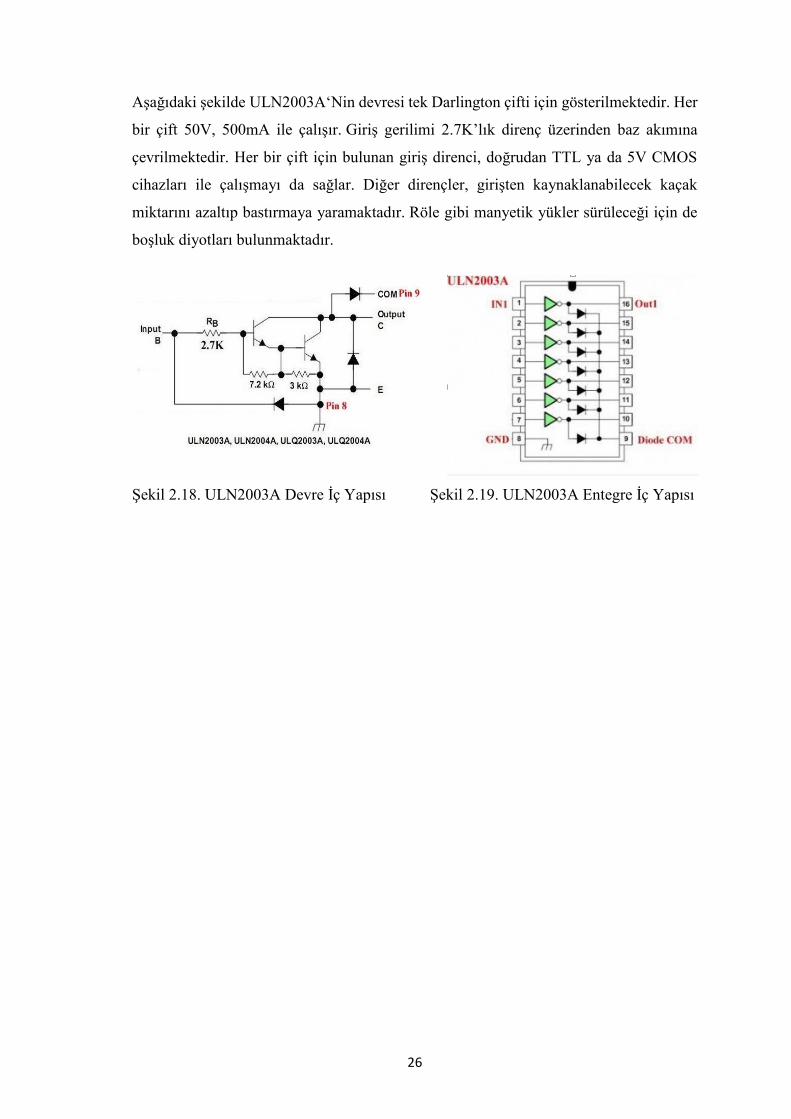
Aşağıdaki şekilde ULN2003A‘Nin devresi tek Darlington çifti için gösterilmektedir. Her
bir çift 50V, 500mA ile çalışır. Giriş gerilimi 2.7K’lık direnç üzerinden baz akımına
çevrilmektedir. Her bir çift için bulunan giriş direnci, doğrudan TTL ya da 5V CMOS
cihazları ile çalışmayı da sağlar. Diğer dirençler, girişten kaynaklanabilecek kaçak
miktarını azaltıp bastırmaya yaramaktadır. Röle gibi manyetik yükler sürüleceği için de
boşluk diyotları bulunmaktadır.
Şekil 2.18. ULN2003A Devre İç Yapısı Şekil 2.19. ULN2003A Entegre İç Yapısı

27
3. TASARIM
3.1. Genel Bilgiler
Sistemimizde asıl amaç görüntü işleme yöntemiyle bir joistik kontrol ekranı
tasarlamaktır. Bizim alt sistemimiz zagi tipi basit bir insansız hava aracıdır. Bu
sistemimizde kullanılan microdenetleyici, servo ve dc motorlar genel olarak bu zagi
üzerindedir.
3.2. Boyutlandırmalar
Şekil 3.1. Zagi Tasarımı
Şekil 3.2. Zagi Boyutlandırması
3.3. Sistem Bileşenleri ve Seçimleri
DC Motor
Hobi araçlarında DC motorlarına sıklıkla ihtiyaç duyabilirsiniz. Küçük boyutları
sayesinde projenizin uygun yerine sığdırmanız kolaydır.
Özellikler
Bakır fırçalı DC motor
28
Gövde ölçüleri : 25mm
Enine kesit ölçüleri : 21mm
Şaft kalınlığı: 2mm
Şaft uzunluğu : 9mm
Bağlantı delik aralığı: 10mm
Bağlantı delik boyutları: 2.3mm
Çalışma voltajı: 5V
Dönüş Hızı: 17000devir/dakika~ 36000 devir/dakika
Servo Motor
Tower Pro SG90 küçük mekanizmalarınız için ideal bir servo motordur. Futaba
kumandalarla tam uyumlu olup RC araclarınızda kullanabilirsiniz. Bunun yanı sıra birçok
mikrodenetleyiciden alabileceğiniz PWM sinyali ile kendi yaptığınız robot projelerinizde
de kolaylıkla kullanabilirsiniz. Dişli kutusu plastiktir. Servo hornları ve diğer parçaları ile
birlikte gönderilir. Diğer hobi servolarında olduğu gibi motor milinin elle sağa sola
çevrilmesiyle dişlileri kırılabilir, motora bu tarz el ile müdahaleden kaçınılmalıdır.
Teknik Detaylar:
Büyüklük: 23.1 x 12.2 x 29 mm
Ağırlık: 9 g
Hız @4.8V: 0.1 sn/60°
Zorlanma Torku @6V: 1.3 kg•cm
Kablo Uzunluğu: 15 cm
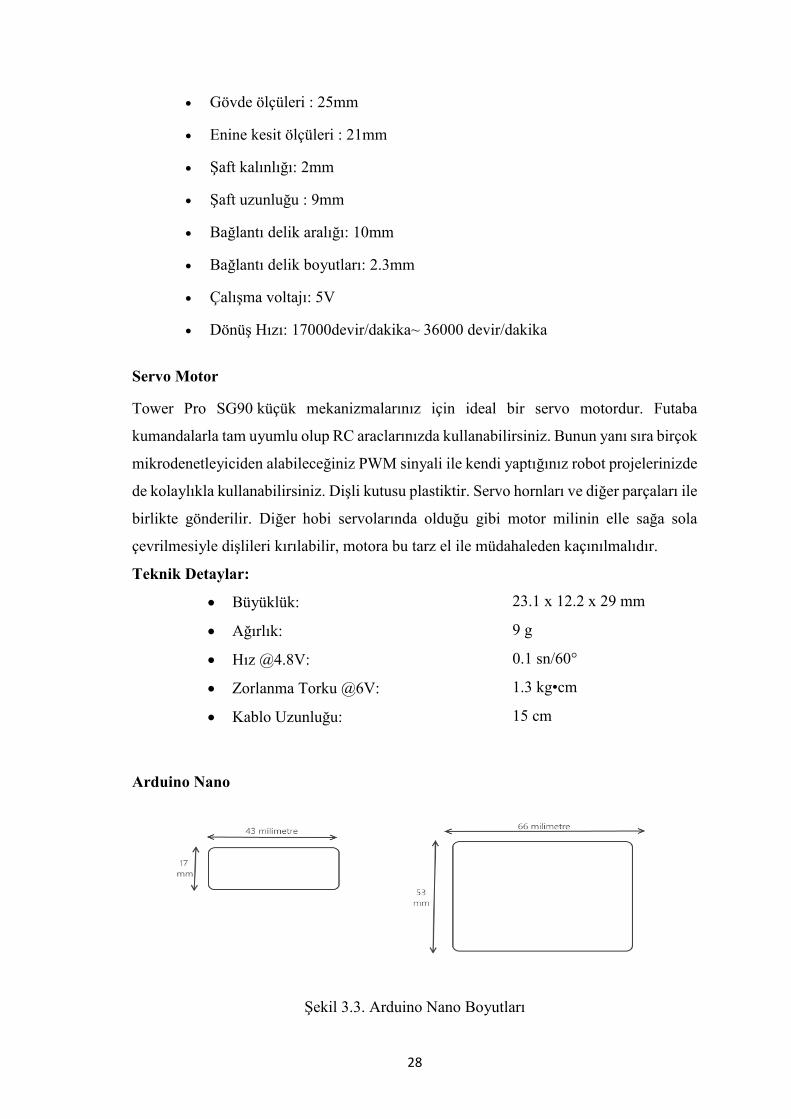
Arduino Nano
Şekil 3.3. Arduino Nano Boyutları
29
Teknik Detaylar:
Uzunluk 45 mm
Genişlik 17 mm
Ağırlık 5mg
Lipo Pil
Lipo Pil, Nimh pillerden sonra bulunan ve sağladığı avatajlar sebebiyle büyük beğeni
toplamıştır. Hafif olması, istenilen boyutlarda üretilebilmesi, yüksek kapasite ve güce
sahip olması, hızlı şarj deşarj imkânı vermesi Lipo kullanımını arttıran nedenlerdir.
Bukadar avantajın yanında dezavantajda barındırmıyor değil. Nimh pillere göre yüksek
fiyatlarda olması, Şarj/deşarj ömrünün kısa olması, patlama riski taşıması, şarj ve deşarj
edilirken yoğun talimatlara uyulması gibi dezavantajları bulunur.
Şekil 3.4. Lipo Pil.
“S” ve “P” değeri nedir?
Lipo pil hücreleri kullanılarak değişik kombinasyonlarda farklı amaçlar için farklı piller
üretilir. Pilde “S” değeri pil içerisinde kaçtane hücrenin seri bağlandığını gösterir. Bir lipo
hücresi 3.7V değerindedir. “S” değeri arttıkça pilin voltajı artmaktadır. Bir tabloyla
açıklamak gerekirse;
1S Lipo = 1 Lipo Hücresi = 3.7V
2S Lipo = 2 Lipo Hücresi = 3.7V+3.7V =7.4V
3S Lipo= 3 Lipo Hücresi= 3.7V+3.7V+3.7V=11.1V
Bu tablo 4S,5S,6S …. diye devam etmektedir.
Bunun yanı sıra paralel bağlanmış lipo pillerde bulunmaktadır. Bu ise “P” değeriyle
gösterilmektedir. Örneğin 2S3P yazan bir pil, 2 hücreli 3 paketin paralel bağlandığını
gösterir. Paralel bağlantının amacı kapasiteyi arttırmaktır.
30
mAh Nedir?
mAh değeri pilin kapasitesini göstermektedir (miliamper/saat). 2000 mAh kapasiteli bir
pilden 1000 miliamper çekilirse 2 saatte pil tamamen deşarj olur. 2000 miliamper
çekilirse 1 saatte tamamen deşarj olacaktır. mAh değeri arttıkça kapasite artacaktır ve
aracınızı kullanma süreniz uzayacaktır.
“C” değeri Nedir?
“C” değeri pilin deşarj hızını temsil eder. 10C değerine sahip bir pil kapasitesinin 10 katı
kadar hızda deşarj edilebilir. 20C değerindeki pil 20 katı kadar, 30C değerindeki pil 30
katı kadar bu şekilde devam eder. Örnekle açıklamak gerekirse, 2000mAh kapasiteli
10C bir pilden sürekli olarak en fazla 20 amper çekilebilir. 5000 mAh 25C bir pilden
sürekli olarak en fazla 125 amper çekilebilir. Genelde 25-30C değerindeki piller işimizi
görmektedir fakat imkan varsa daha yüksek C değerine sahip pilleri tercih etmekte fayda
vardır.
Şekil 3.5. Lipo Pil Batarya.
Lipo Pil Kullanımı
Yazının başında da bahsettiğimiz gibi lipo piller çok narin pillerdir ve dikkatli
kullanılması gerekmektedir. Lipo pil kullanımında %80 kullanım kuralı vardır. 3000mAh
kapasiteli bir pilin sadece %80 inini yani 2400mAh kadar kullanmanız gerekir. Voltaj
olarak ele aldığımızda, bir lipo hücresinin en düşük voltajı 3.7V olmalıdır. Hücre voltajı
4.2V olduğunda hücrenin tamamen dolu olduğu anlamına gelir. 2S bir pil kullandığımızı
farzedersek iki hücrenin toplam voltajı 8.4V olduğunda pil tamamen doludur. 7.4V
olduğunda ise pil tamamen boştur ki bu voltajı görmenizi tavsiye etmiyoruz. %80 kuralını
baz alırsak en fazla 3.74 voltaja kadar düşmesini gerekir.
31
Lipo Pil Nasıl Şarj Edilir?
Yukarıda voltajlarla alakalı kısa bir bilgilendirme yaptık, tekrarlarsak lipo hücresi 4.2V’
a ulaştığında tamamen dolmuş, 3.7V’ a ulaştığında tamamen boşalmış olacaktır. Lipo pil
şarj etmek için bilgisayarlı şarj cihazı kullanmanızı tavsiye ederiz. Turnigy Accucel-6,
Imax B6 yaygın kullanılan şarj aletleridir. Her pil kendi özelliğine göre şarj edilme
koşullarına sahiptir. Örnek olarak 3S 5000 mah bir pili şarj edersek, Lipo balance
modunda 3S seçip kapasitenin %80′ i kadar yani 4.0 Amper ile şarj etmeliyiz.
Bahsettiğimiz şarj aletleri otomatik şarjı kesme özelliğine sahiptirler. Aynı pil için
konuşursak şarj edilen mAh 5000 değerine ulaştığında şarjı kesecektir. Ancak pil
tamamen boş olmadığında Voltajı kontrol ederek 3S pilin maksimum olması gereken
voltajı (4.2V*3) 12.6 Voltta şarjı kesecektir.
Lipo Balance modunda şarj etmenin avantajı her hücreye ayrı şarj işlemi uygulaması.
Bazı durumlarda hücreler birbirinden farklı voltaj değerlerine sahip olabiliyor. Örneğin
2S bir pilde 1.hücre 3.9V 2. hücre 4.15V değerlerinde olabiliyor, eğer normal modda şarj
edersek 2.hücre 4.2 olduğunda 1. hücre henüz tamamlanmamış olacak, daha da kötüsü
,1.hücreyi 4.2 Volta getirmeye çalışırken 2. hücre kapasitenin üzerine çıkacak ve hücreye
zarar verecek. Bu yüzden balans modunda şarj ederek her hücreyi gerektiği kadar şarj
ediyoruz.
Lipo piller uzun süre kullanılmayacaksa tamamen boş yada tamamen dolu
bırakılmamalıdırlar. Tavsiye edilen voltaj hücre başına 3.85 Volttur. Akıllı şarj
aletlerinde Lipo Storage modunda şarj ederek lipo pillerinizi oda sıcaklığında
saklayabilirsiniz. Daha uzun saklama süresi için 0 dereceye yakın yerlerde
saklayabilirsiniz.
Teknik Özellikleri:
Gerilim: 11,1V
850mAh
25C sürekli, 50C anlık (maksimum 10sn.) deşarj katsayısı
Ağırlığı 67gr
Boyutları: 70x22x18mm
3 Hücreli
Deans (T-plug) ve Balancer Şarj Soketi Mevcuttur.
32
3.4. Uygulanan Yöntemler
Görüntü işleme uygulamaları genellikle tek aşamada gerçekleşmekte ve sayısal
çözümlemeler burada yapılmaktadır. Devre tasarım aşamaları ise genellikle proteus veya
orcad ortamında yapılacak olup haberleşme sistemleri bu ortama entegre edilecektir.
3.5. Yazılımlar
3.5.1 Visual Studio
Visual Studio ya da tam adıyla Microsoft Visual Studio; Windows masaüstü, Windows
Modern -eski ve bilinen adıyla Metro- arayüz(Windows 8/8.1) ve Windows Phone 8/8.1
için uygulama geliştirmenize yarayan bir yazılımdır. Son zamanlarda raspberry pi 3 ve 2
de de kurulabilmektedir.
Şekil 3.6. Visual Studio Programı.
3.5.2 C++
C++ bilindiği gibi programlama dünyasında en çok ilgi gören C dilinden türemiştir. C++’ı
klasik C dilinden farklı yapan yanı; Nesne Yönelimli Programlamayı da ( Object Oriented
Programming) C’nin sözdizimi kurallarıyla birlikte desteklemesidir. Normalde C ile
sadece yapısal programlama yaparken C++ dili ile hem yapısal hem de nesne yönelimli
programlar yazabilirisiniz. C++ diline başlarken önce dilin C’den gelen ve temel olan
özelliklerini öğrenmek gerekir. Örneğin, değişken tanımlama, atama ve diğer basit
aritmektik işlemler, kontrol yapıları ve döngüler gibi.
33
Şekil 3.7. C++ Yazılım Dili.
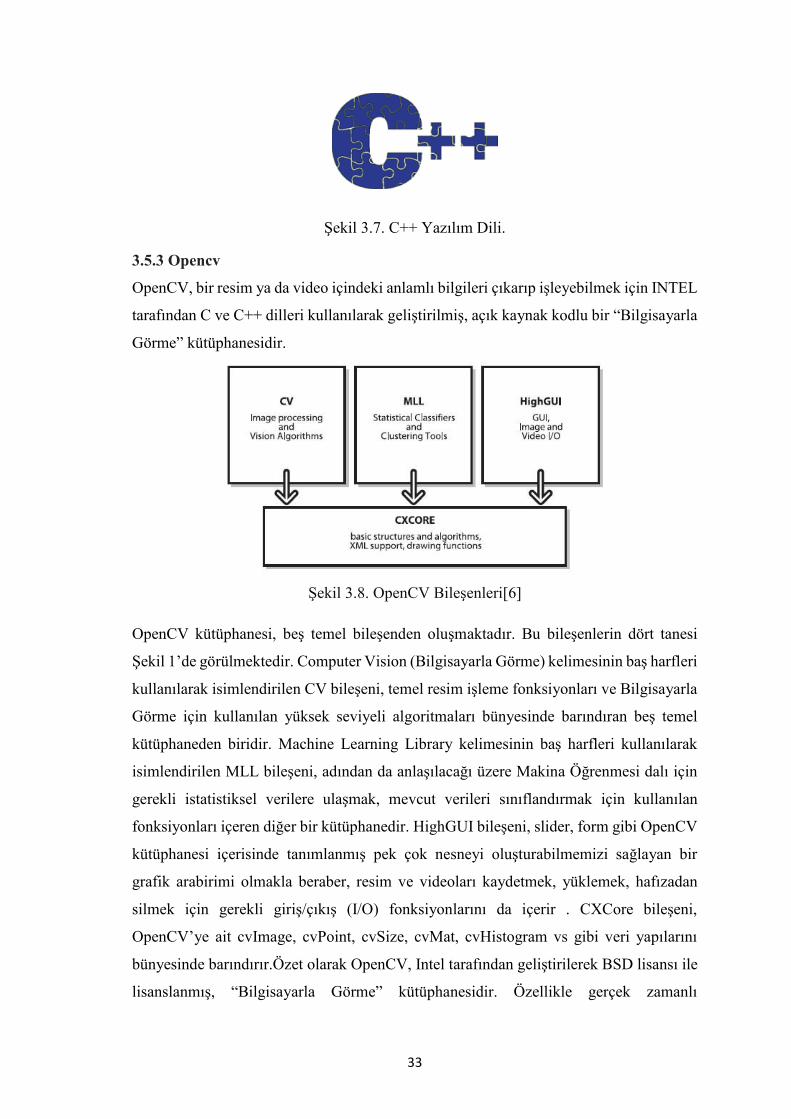
3.5.3 Opencv
OpenCV, bir resim ya da video içindeki anlamlı bilgileri çıkarıp işleyebilmek için INTEL
tarafından C ve C++ dilleri kullanılarak geliştirilmiş, açık kaynak kodlu bir “Bilgisayarla
Görme” kütüphanesidir.
Şekil 3.8. OpenCV Bileşenleri[6]
OpenCV kütüphanesi, beş temel bileşenden oluşmaktadır. Bu bileşenlerin dört tanesi
Şekil 1’de görülmektedir. Computer Vision (Bilgisayarla Görme) kelimesinin baş harfleri
kullanılarak isimlendirilen CV bileşeni, temel resim işleme fonksiyonları ve Bilgisayarla
Görme için kullanılan yüksek seviyeli algoritmaları bünyesinde barındıran beş temel
kütüphaneden biridir. Machine Learning Library kelimesinin baş harfleri kullanılarak
isimlendirilen MLL bileşeni, adından da anlaşılacağı üzere Makina Öğrenmesi dalı için
gerekli istatistiksel verilere ulaşmak, mevcut verileri sınıflandırmak için kullanılan
fonksiyonları içeren diğer bir kütüphanedir. HighGUI bileşeni, slider, form gibi OpenCV
kütüphanesi içerisinde tanımlanmış pek çok nesneyi oluşturabilmemizi sağlayan bir
grafik arabirimi olmakla beraber, resim ve videoları kaydetmek, yüklemek, hafızadan
silmek için gerekli giriş/çıkış (I/O) fonksiyonlarını da içerir . CXCore bileşeni,
OpenCV’ye ait cvImage, cvPoint, cvSize, cvMat, cvHistogram vs gibi veri yapılarını
bünyesinde barındırır.Özet olarak OpenCV, Intel tarafından geliştirilerek BSD lisansı ile
lisanslanmış, “Bilgisayarla Görme” kütüphanesidir. Özellikle gerçek zamanlı

34
uygulamalar hedef alınarak geliştirilmiş olması, ticari kullanımı dahil ücretsiz olması ve
Windows, Linux, MacOS X gibi farklı platformlarda kullanılabilmesi bu kütüphaneyi
diğer görüntü işleme araçlarından bir adım öne çıkarmaktadır.
3.5.4 Yapılacak Yazılımın Akış Diyagramı
3.5.5 Kontrol Yazılımı
Tablo 3.1. Konsol ekranı tasarımı
Motor çalışma
Sol hareket
Sağ ve
sol
Referans
Bölgesi
Motor
çalışma
Motor çalışma
Sağ hareket
Motor durdurma
35
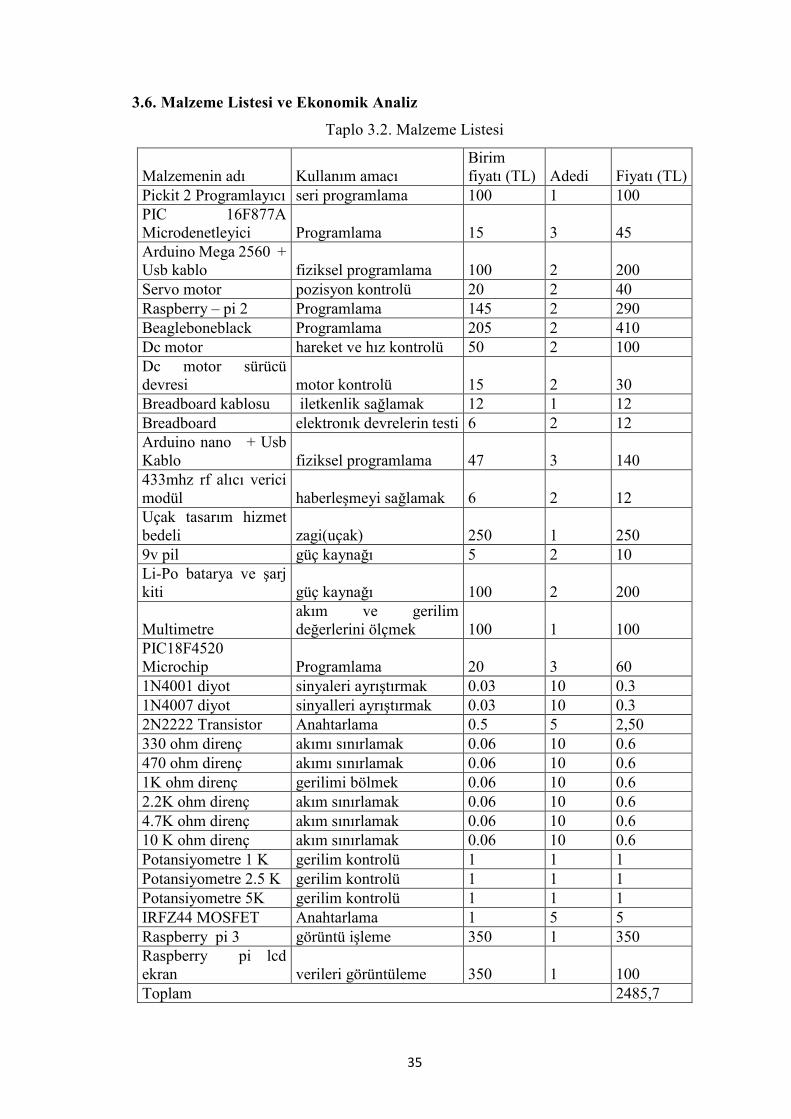
3.6. Malzeme Listesi ve Ekonomik Analiz
Taplo 3.2. Malzeme Listesi
Malzemenin adı Kullanım amacı
Birim
fiyatı (TL) Adedi Fiyatı (TL)
Pickit 2 Programlayıcı seri programlama 100 1 100
PIC 16F877A
Microdenetleyici Programlama 15 3 45
Arduino Mega 2560 +
Usb kablo fiziksel programlama 100 2 200
Servo motor pozisyon kontrolü 20 2 40
Raspberry – pi 2 Programlama 145 2 290
Beagleboneblack Programlama 205 2 410
Dc motor hareket ve hız kontrolü 50 2 100
Dc motor sürücü
devresi motor kontrolü 15 2 30
Breadboard kablosu iletkenlik sağlamak 12 1 12
Breadboard elektronık devrelerin testi 6 2 12
Arduino nano + Usb
Kablo fiziksel programlama 47 3 140
433mhz rf alıcı verici
modül haberleşmeyi sağlamak 6 2 12
Uçak tasarım hizmet
bedeli zagi(uçak) 250 1 250
9v pil güç kaynağı 5 2 10
Li-Po batarya ve şarj
kiti güç kaynağı 100 2 200
Multimetre
akım ve gerilim
değerlerini ölçmek 100 1 100
PIC18F4520
Microchip Programlama 20 3 60
1N4001 diyot sinyaleri ayrıştırmak 0.03 10 0.3
1N4007 diyot sinyalleri ayrıştırmak 0.03 10 0.3
2N2222 Transistor Anahtarlama 0.5 5 2,50
330 ohm direnç akımı sınırlamak 0.06 10 0.6
470 ohm direnç akımı sınırlamak 0.06 10 0.6
1K ohm direnç gerilimi bölmek 0.06 10 0.6
2.2K ohm direnç akım sınırlamak 0.06 10 0.6
4.7K ohm direnç akım sınırlamak 0.06 10 0.6
10 K ohm direnç akım sınırlamak 0.06 10 0.6
Potansiyometre 1 K gerilim kontrolü 1 1 1
Potansiyometre 2.5 K gerilim kontrolü 1 1 1
Potansiyometre 5K gerilim kontrolü 1 1 1
IRFZ44 MOSFET Anahtarlama 1 5 5
Raspberry pi 3 görüntü işleme 350 1 350
Raspberry pi lcd
ekran verileri görüntüleme 350 1 100
Toplam 2485,7
36
4. SİMÜLASYON (BENZETİM) ÇALIŞMALARI
4.1. Genel Bilgiler
Simülasyon çalışmalarımızı Proteus Catia Orcad Matlab ve Arduino simülasyon arayüzü
kullanılarak yapılacaktır.
4.2. Simülasyon Yazılımı
4.2.1 Proteus
Diğer Bir Tanımı Labcenter Elektronics firmasının bir ürünü olan PROTEUSprogramı
ISIS ve ARES olmak üzere iki alt programdan oluşur. ISIS'ta elektronik devre çizimi
gerçekleştirilirken, bunun yanında devrenin analizi de yapılabilmektedir.
Elektronik sistemlerin tasarımları ve analizi için kullanılacaktır.[17]
4.2.2 Catia
CATIA (Computer Aided Three-Dimensional Interactive Application), (Bilgisayar
Destekli Üç Boyutlu Interaktif Kullanım) fransız Dassault Systèmes şirketi tarafından
üretilen bir profesyonel CAD/CAM tabanlı yazılımdır. Zagi tipi insansız hava aracının
airodinamik analizi için kullanılacaktır.
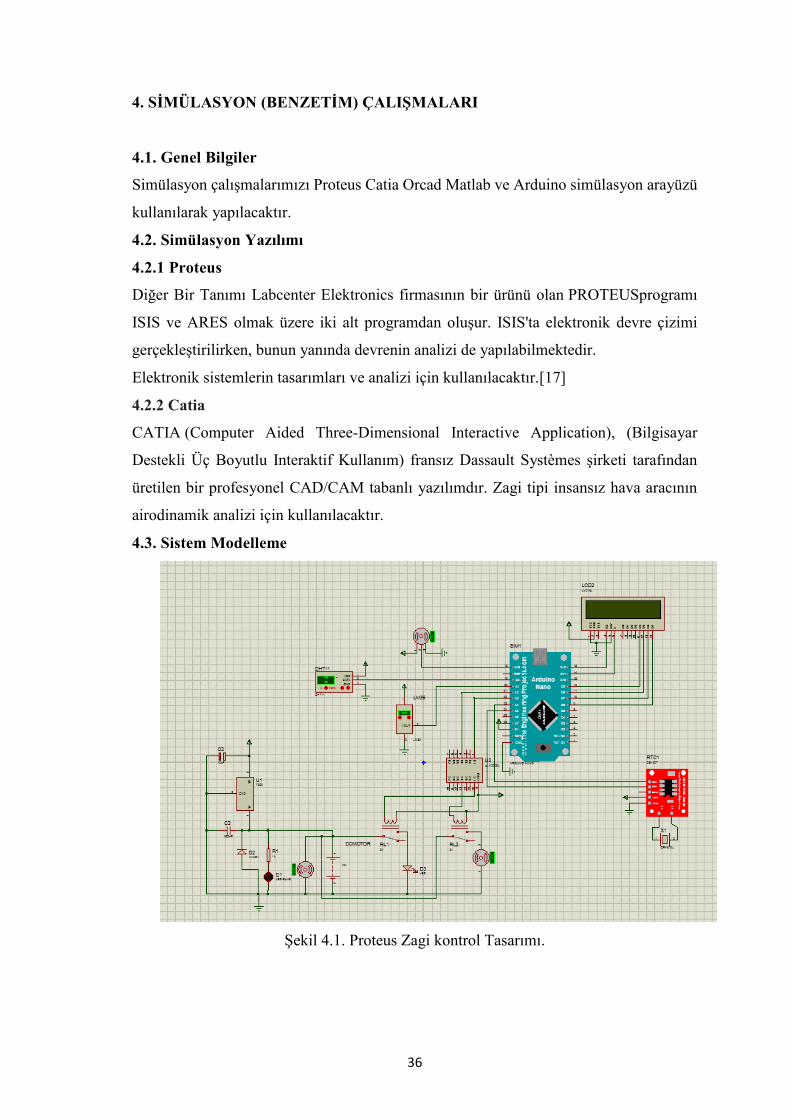
4.3. Sistem Modelleme
Şekil 4.1. Proteus Zagi kontrol Tasarımı.

37
Şekil 4.2. Catia Zagi Kontrol Tasarımı.[16]
4.4. Simülasyon
Proteussimülasyon programında zagi tibi iha nın kontrol güç ve soğutma sistemleri
modellenerek gerçeklemesi simüle edilmiştir. Arduino Nano microkontrolü ile sistemler
arası kontrol sağlanmıştır.Catia simülasyonunda ise zaginin airodinamik analizii kanat
dayanım mukavemeti malzeme yapılarındaki deişim analiz edilmeye çalışılacaktır.
38
5. GÖRÜNTÜ İŞLEME
5.1. Görüntü İşlemenin Tanımı
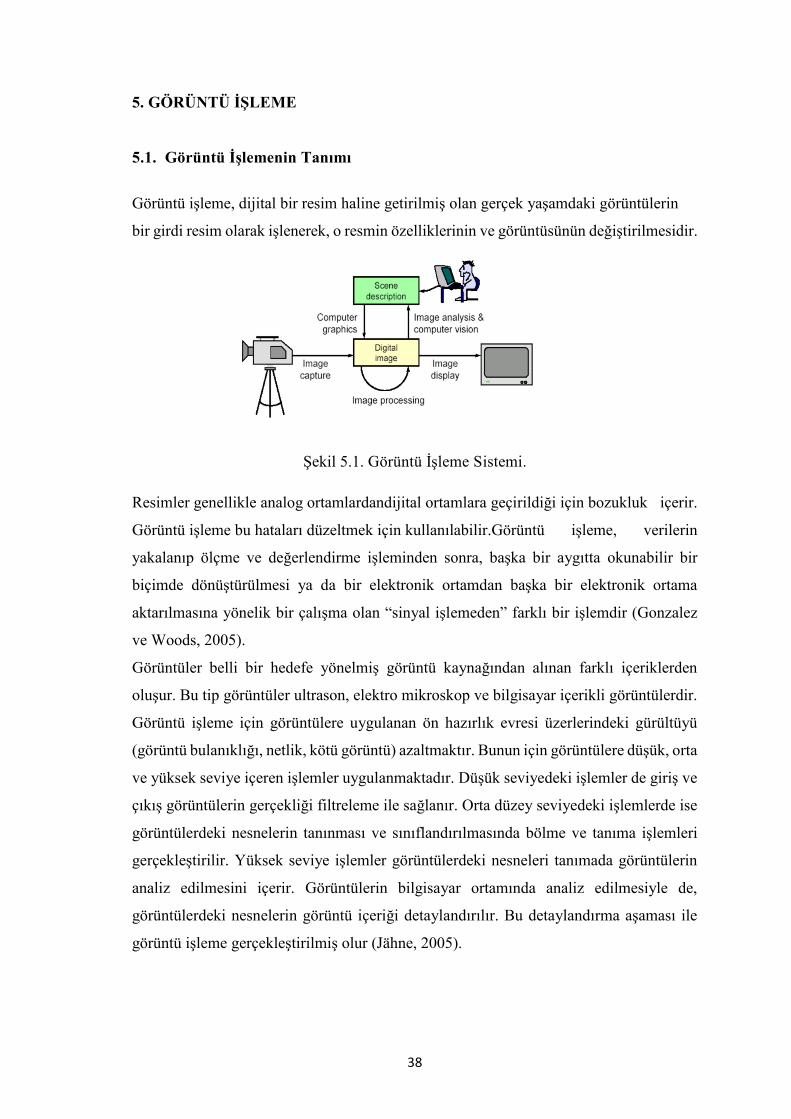
Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin
bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir.
Şekil 5.1. Görüntü İşleme Sistemi.
Resimler genellikle analog ortamlardandijital ortamlara geçirildiği için bozukluk içerir.
Görüntü işleme bu hataları düzeltmek için kullanılabilir.Görüntü işleme, verilerin
yakalanıp ölçme ve değerlendirme işleminden sonra, başka bir aygıtta okunabilir bir
biçimde dönüştürülmesi ya da bir elektronik ortamdan başka bir elektronik ortama
aktarılmasına yönelik bir çalışma olan “sinyal işlemeden” farklı bir işlemdir (Gonzalez
ve Woods, 2005).
Görüntüler belli bir hedefe yönelmiş görüntü kaynağından alınan farklı içeriklerden
oluşur. Bu tip görüntüler ultrason, elektro mikroskop ve bilgisayar içerikli görüntülerdir.
Görüntü işleme için görüntülere uygulanan ön hazırlık evresi üzerlerindeki gürültüyü
(görüntü bulanıklığı, netlik, kötü görüntü) azaltmaktır. Bunun için görüntülere düşük, orta
ve yüksek seviye içeren işlemler uygulanmaktadır. Düşük seviyedeki işlemler de giriş ve
çıkış görüntülerin gerçekliği filtreleme ile sağlanır. Orta düzey seviyedeki işlemlerde ise
görüntülerdeki nesnelerin tanınması ve sınıflandırılmasında bölme ve tanıma işlemleri
gerçekleştirilir. Yüksek seviye işlemler görüntülerdeki nesneleri tanımada görüntülerin
analiz edilmesini içerir. Görüntülerin bilgisayar ortamında analiz edilmesiyle de,
görüntülerdeki nesnelerin görüntü içeriği detaylandırılır. Bu detaylandırma aşaması ile
görüntü işleme gerçekleştirilmiş olur (Jähne, 2005).

39
Görüntü işlemenin sağladığı faydalar, kullanım tekniklerine göre değişiklik
göstermektedir. Görüntünün işlenmesinde kullanılan bu tekniklerin her biri görüntüye
farklı açıdan yaklaşmaktadır. Görüntü işleme üzerine yapılan çalışmaların özünde
görüntüyü çözümleme ve dolayısıyla sayısallaştırma yatmaktadır ve günümüzde görüntü
işleme; tasarım, imalat, güvenlik, tıp, elektronik, makine, mimari, jeodezi vb. gibi
birbirinden farklı birçok alanda kullanılan genel bir çalışma alanı olarak karşımıza
çıkmaktadır. Kullanılan alanların çeşitliliği göz önünde bulundurulduğunda, bu alanda
yapılan çalışmaların sayısını da gün geçtikçe arttırmaktadır. Bu nedenle görüntü işleme
alanında yapılan çalışmaların genel bir değerlendirilmesinin yapılması söz konusu
değildir. Dolayısıyla bu çalışmada yapılan çalışmaların değerlendirilmesinde, genel
olarak düşünülen birkaç alan kullanılmıştır. Sayısal görüntü çeşitli yollarla elde edilen
bilgilerin görüntüsel olarak saklanmasına ve gösterimine olanak sağlayan resimlerdir. Her
türlü iki boyutlu bilgi sayısal görüntü olarak ele alınabilir.
3 Boyutlu gerçek nesne uzayından sadece 2 boyutun kullanımı ile oluşturulur. Kamera
benzeri cihazların ışığa duyarlı 2 boyutlu yüzeyine nesneden yansıyan ışık kullanılarak
sayısal görüntü elde edilir.
Şekil 5.2. Görüntü Oluşumu.
Görüntü iki boyutlu bir ışık yoğunluğu fonksiyonunu ifade eder. f(x,y) olarak ifade
edebileceğimiz görüntü sinyali, herhangi x ve y koordinatlarındaki bir pikselin sahip
olduğu ışık enerjisinin bir ölçüsüdür ve görüntü piksel değerlerinden oluşmaktadır.

40
Şekil 5.3. Görüntünün İki Boyutlu İfadesi[4]
Şekil 5.4. Görüntünün Pixel İfadesi
Görüntü üzerinde yapılan bütün işlemler pixsel değerleri üzerindeki deşiğimler
sonucunda elde edilir. Görüntüde yapılan iyileştirmelerde bu şekilde elde edillir.
5.2. Görüntü İyileştirme Teknikleri
5.2.1. Gri Seviyeye Dönüştürme
Renkli bir görüntünün gri seviyeye dönüşümü farklı alanlarda (tıp, astronomi, kimya,
basılı yayın) etkin bir şekilde kullanılan görüntü işleme uygulamalarından birisidir.
Renkli bir görüntüdeki bir piksel kırmızı, yeşil ve mavi (RGB) renklerinin bileşimidir.
Görüntüdeki RGB renk değerleri 3 boyutlu (XYZ) açıklık, kroma ve renk tonu olarak
temsil edilmektedir. RGB kodlaması, saf kırmızı (255, 0, 0), saf yeşil (0,255,0), ve saf
mavi (0,0,255) olarak gösterilir. Tüm RGB kodlamalarında ilk değer kırmızı, ikinci değer
yeşil ve son değer mavi miktarını temsil eder. Üç sayı aralığı 0-255 arasındadır.
41
Renkli bir görüntünün kalitesi bit sayısına göre değişkenlik gösterir. Basit bir renkli
görüntü 8 bit ile, yüksek renk görüntü 16 bit ile, gerçek renk görüntü 24 bit ile, derin renk
görüntü ise 32 bit ile ifade edilir. Gri tonlu görüntüler siyah ve beyaz pikseller ile işlenir.
Herhangi bir gri değerinde RGB kodlaması 0-255 arasında bir tamsayı değeri alır ve 3
sayı da birbirine eşittir. Örneğin beyazın RGB kodlaması (255,255,255), siyahın (0, 0, 0),
orta grinin ise (127,127,127) olarak gösterilir. Renkli bir görüntüyü gri tonlamalı hale
dönüştürmek için görüntüdeki kırmızı, yeşil ve mavi değerlerin ağırlıklı ortalaması
hesaplanır. Gri tonlamalı ağırlıklı ortalama aşağıdaki eşitlik kullanılarak gösterilmiştir.
Denklemde ifade edilen r, g ve b, bir görüntüde bulunan 0-255 arası tam sayı değerleri
alabilen renk değerleridir:
𝑥 = (0.299 × 𝑟) + (0.587 × 𝑔) + (0.114 × 𝑏)
Denklemde görüldüğü gibi renkler eşit ağırlıklı değildir. Bunun nedeni saf yeşilin, saf
kırmızı ve saf maviye göre daha açık olmasıdır bu nedenle yeşil daha yüksek bir ağırlığa
sahiptir. Saf mavi üç rengin arasında en karanlık olanıdır bu yüzden eşitlikte en az ağırlığa
mavi sahiptir.
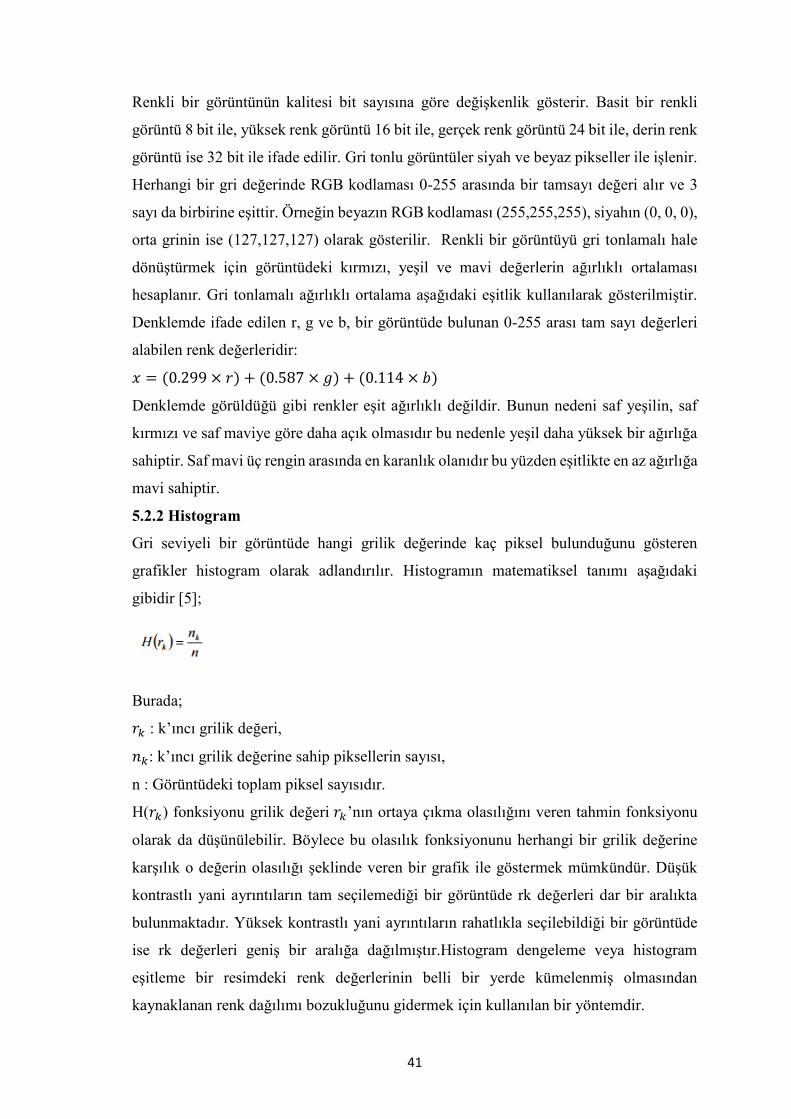
5.2.2 Histogram
Gri seviyeli bir görüntüde hangi grilik değerinde kaç piksel bulunduğunu gösteren
grafikler histogram olarak adlandırılır. Histogramın matematiksel tanımı aşağıdaki
gibidir [5];
Burada;
𝑟𝑘 : k’ıncı grilik değeri,
𝑛𝑘: k’ıncı grilik değerine sahip piksellerin sayısı,
n : Görüntüdeki toplam piksel sayısıdır.
H(𝑟𝑘) fonksiyonu grilik değeri 𝑟𝑘’nın ortaya çıkma olasılığını veren tahmin fonksiyonu
olarak da düşünülebilir. Böylece bu olasılık fonksiyonunu herhangi bir grilik değerine
karşılık o değerin olasılığı şeklinde veren bir grafik ile göstermek mümkündür. Düşük
kontrastlı yani ayrıntıların tam seçilemediği bir görüntüde rk değerleri dar bir aralıkta
bulunmaktadır. Yüksek kontrastlı yani ayrıntıların rahatlıkla seçilebildiği bir görüntüde
ise rk değerleri geniş bir aralığa dağılmıştır.Histogram dengeleme veya histogram
eşitleme bir resimdeki renk değerlerinin belli bir yerde kümelenmiş olmasından
kaynaklanan renk dağılımı bozukluğunu gidermek için kullanılan bir yöntemdir.

42
Şekil 5.5. Histogram Eşitleme; a) Örnek Resim, b) Örnek Resmin Histogramı,
c)Histogram Eşitlemeden Sonraki Resim, d) Eşitlenmiş Histogram
5.2.3 Eşikleme
Görüntü işlemede en çok tercih edilen yöntemlerden biridir. Özellikle arka plan ve
nesneyi birbirinden ayırt etmek için kullanılır (Gonzales ve Woods, 2002). Sayısal bir
görüntünün eşikleme işlemine tutulmasındaki amaç, nesne görüntüsünün özelliklerini
belirlemede kolaylık sağlamaktır. Eşikleme işlemiyle, görüntü iki renkle ifade edilebilir
biçime getirilir. Görüntüyü eşikleme işlemine tabi tutmadan önce bir eşik değeri saptanır.
Eşik değerinden daha yüksek gri seviye değerine sahip olan piksellere “1” değeri, daha
küçük değerlere sahip olan piksellere ise “0” değer ataması yapılarak görüntü daha basit
bir biçime (siyah-beyaz) getirilmiş olur (Türkoğlu, 2003). Bu işlem sonucunda hatalı
bölge arka plandan tamamen bağımsız bir şekilde görülebilir hale getirilir. Nesne ve arka
plan pikselleri iki ayrı grupta değerlendirilebilir. Bu durumda nesneleri arka plandan
ayırabilecek en basit yol, bu biçimlerin birbirinden ayrılabilmesini sağlayacak bir T eşik
seviyesini seçmektir. Buna göre, görüntüdeki herhangi bir (i, j) pikseli için; f(i, j) > T ise
(i, j) pikseli nesneye ait bir nokta, f(i, j) ≤ T ise (i, j) pikseli arka plana ait bir nokta
olacaktır. Diğer bir deyişle, bölütlenmiş g(x,y) görüntüsü aşağıdaki eşitlikteki gibi ifade
edilir:
g(x, y) = {1 eğer f(x, y) > T ise
0 eğer f(x, y) ≤ T ise

43
Şekil 5.6. Eşiklemenin Grafiksel İfadesi
Şekil 5.7. Örnek İmge Histogramı ve İkili Eşikleme İşlevine İlişkin Giriş ve Çıkış
İmgeleri
Verilen gri seviyeli görüntüyü ikisi nesneye biri de arka plana ait olmak üzere üç gri
seviyeye dönüştürülebilir. Buna göre görüntüdeki herhangi bir (i, j) pikseli için; T1 < f(i,
j) ≤ T2 aralığındaki pikseller bir nesneye, f(i, j) > T2 aralığındaki pikseller diğer bir
nesneye ve f(i, j) ≤ T1 aralığındaki pikseller de görüntü arka planına karşı düşecektir.
Bölütlenmiş görüntü aşağıdaki gibi elde edilir:
g(x, y) = {
a eğer f(x, y) > T2
b eğer T1 < f(x, y) ≤ T2
c eğer f(x, y) ≤ T1
[6]
Şekil 5.8. Örnek İmge Histogramı ve Çoklu Eşikleme İşlevine İlişkin Giriş ve Çıkış
İmgeleri

44
Eşikleme için temel yaklaşım olarak, bir görüntüdeki her noktanın komşuluğunda
bulunan piksellerin standart sapma ve ortalama değerleri kullanılır. Bu iki değer yerel
zıtlığı yani kontrastı ve ortalama yeğinliği tanımladıklarından dolayı yerel eşiği
hesaplamada oldukça kullanışlıdırlar. σxy Ve mxy bir görüntüde, (x,y) koordinatlarında
merkezlenmiş bir Sxy komşuluğunda bulunan piksel kümelerinin standart sapma ve
ortalama değerlerini göstersinler. Yerel eşik değişkenlerinin yaygın bir biçimi aşağıdaki
eşitlikle ifade edilir:
Txy = a × σxy + b × mxy
Denklemde bulunan a ve b, negatif olmayan sabitlerdir.
Sxy Komşuluğunda bir görüntünün standart sapma ve ortalama değerleri sırasıyla
aşağıdaki eşitliklerde gösterilmiştir:
𝜎𝑥𝑦 = √1
𝑀×𝑁× (∑ ∑ [𝑓(𝑥, 𝑦) − 𝑚]2𝑁−1
𝑦=0𝑀−1𝑥=0 )
𝑚𝑥𝑦 =1
𝑀×𝑁× (∑ ∑ 𝑓(𝑥, 𝑦)𝑁−1
𝑦=0𝑀−1𝑥=0 )
Yukarıda bulunan standart sapma ve ortalama değerleri Txy eşitliğinde yerine konulursa
Sxy komşuluğundaki eşik değeri belirlenmiş olur. Buradan eşiklemede bölütlenmiş
görüntü şu şekilde ifade edilir:
g(x, y) = {1 eğer f(x, y) > Txy ise
0 eğer f(x, y) ≤ Txy ise
5.2.4. Medyan (Ortanca) Filtre
Dijital resimlerin elde edilmesi ve iletilmesinde birçok farklı kaynaktan dolayı gürültüler
oluşabilmekledir. Bu gürültülerin giderilmesi için kullanılan en etkin yöntem medyan
filtrelemedir. Medyan filtre, piksellerde bulunan tuzbiber (saltpepper) gürültüsünü, benek
(speckle) ve dürtü (impulsive) gürültüsünü azaltmak için kullanılan doğrusal olmayan bir
alçak geçiren filtre çeşididir.
Medyan filtrelemede, görüntüdeki bir piksel işleme alındığında bu pikselin parlaklık
değeri ile birlikte bu pikselin komşusu olan piksellerin parlaklık değerleri bir küme olarak
ele alınır. Bu küme içindeki orta parlaklık değeri işleme alınan pikselin yeni parlaklık
değeri olarak atanır. Bu şekilde işlem resimdeki tüm pikseller için sürdürülür. İşlemde
kullanılan komşuluk alanı da ayrıca tanımlanabilmektedir. Ortanca değerin
kullanılmasının amacı en küçük ve en büyük değerlerin etkilerinin azaltılmasıdır.
Ortanca değeri bulmak için tüm değerler küçükten büyüğe sıralanır, dizinin ortasında

45
kalan değer o dizinin orta değeridir. Örneğin “3, 5, 6, 7, 14, 16, 18” sayı dizisinin ortalama
değeri yaklaşık 9 iken orta değeri 7’dir. Medyan filtreleme ile gürültü gidermenin bir
örneği Şekil 40.’da verilmiştir.
Şekil 5.9. Medyan Filtre
5.2.5 Kenar Belirleme
Kenar belirleme, gri seviyede anlamlı süreksizlikleri belirlemek için en yaygın
yaklaşımdır. Kenar, iki bölge arasında sınırda uzanan bağlantılı piksellerin kümesidir
(Gonzales ve Woods, 2002).Kenar çıkarmadaki amaç, görüntünün içerdiği bilgiyi
değerlendirip, gereksiz ve tanıma işlemlerinde zaman kaybettiren bilgiyi eleyerek yeterli
düzeye indirgemektir (Türkoğlu, 2003).Değişik yöntemler kenar bulmak amacı ile tek
renkli görüntülerde kullanılmıştır. Prewitt ve Sobel en iyi bilinen yöntemlerdir ve 3x3’lük
yatay ve düşey yönlü maskelerden oluşurlar.
Görüntüler iki boyutlu olduğundan, kısmi sayısal türev kullanılır. Buradan önemli bir
tanımlamaya gradient bağıntısı ön plandadır. Bir f(x,y) fonksiyonu için; gradient bağıntısı
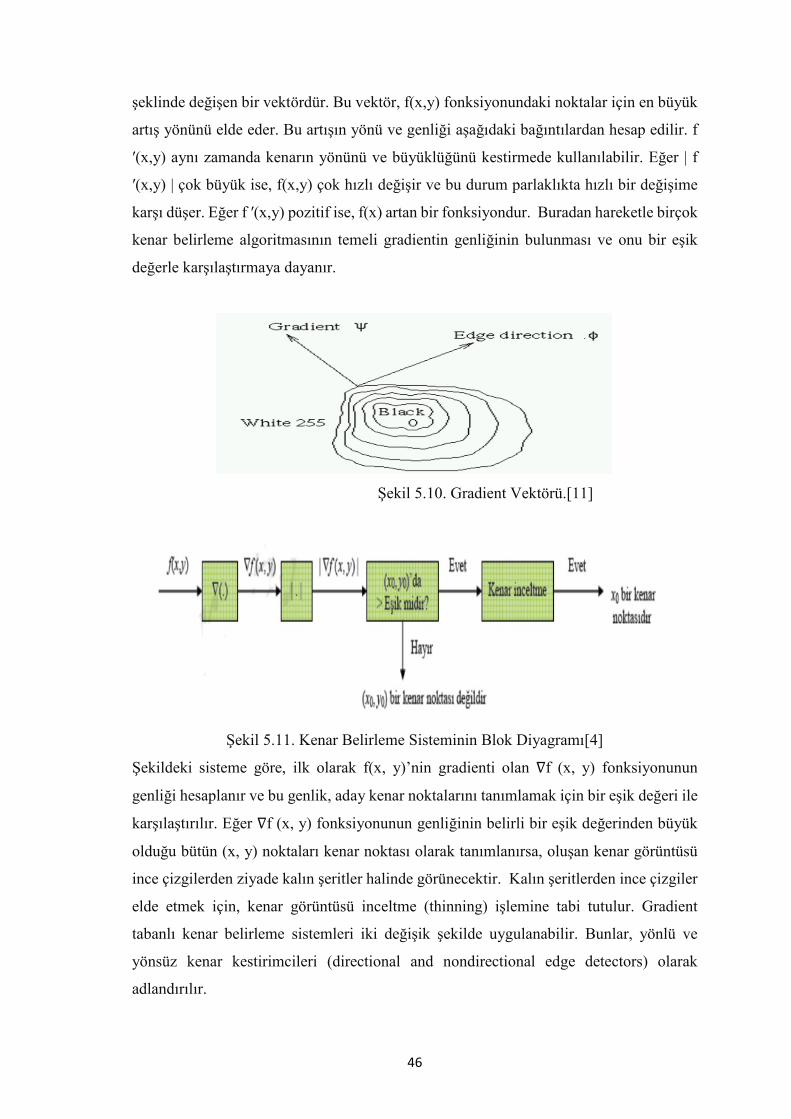
46
şeklinde değişen bir vektördür. Bu vektör, f(x,y) fonksiyonundaki noktalar için en büyük
artış yönünü elde eder. Bu artışın yönü ve genliği aşağıdaki bağıntılardan hesap edilir. f
′(x,y) aynı zamanda kenarın yönünü ve büyüklüğünü kestirmede kullanılabilir. Eğer | f
′(x,y) | çok büyük ise, f(x,y) çok hızlı değişir ve bu durum parlaklıkta hızlı bir değişime
karşı düşer. Eğer f ′(x,y) pozitif ise, f(x) artan bir fonksiyondur. Buradan hareketle birçok
kenar belirleme algoritmasının temeli gradientin genliğinin bulunması ve onu bir eşik
değerle karşılaştırmaya dayanır.
Şekil 5.10. Gradient Vektörü.[11]
Şekil 5.11. Kenar Belirleme Sisteminin Blok Diyagramı[4]
Şekildeki sisteme göre, ilk olarak f(x, y)’nin gradienti olan ∇f (x, y) fonksiyonunun
genliği hesaplanır ve bu genlik, aday kenar noktalarını tanımlamak için bir eşik değeri ile
karşılaştırılır. Eğer ∇f (x, y) fonksiyonunun genliğinin belirli bir eşik değerinden büyük
olduğu bütün (x, y) noktaları kenar noktası olarak tanımlanırsa, oluşan kenar görüntüsü
ince çizgilerden ziyade kalın şeritler halinde görünecektir. Kalın şeritlerden ince çizgiler
elde etmek için, kenar görüntüsü inceltme (thinning) işlemine tabi tutulur. Gradient
tabanlı kenar belirleme sistemleri iki değişik şekilde uygulanabilir. Bunlar, yönlü ve
yönsüz kenar kestirimcileri (directional and nondirectional edge detectors) olarak
adlandırılır.

47
| ∇f (x, y) | fonksiyonunu kullanan kenar belirleme sistemlerine yönsüz kenar kestirimcisi
adı verilir ki bu sistem herhangi bir doğrultu için ayarlı değildir ve her yön için eşit
ağırlıklı sonuçlar üretir. Eğer kenar belirleme sistemi herhangi bir yön için ayarlanmışsa
bu sistemlere yönlü kenar kestirimcisi adı verilir. Örneğin, bir önce açıklanan kenar
belirleme sisteminde |∇f (x, y)| fonksiyonu yerine sadece | ∂f (x, y) / ∂x | fonksiyonu
kullanılırsa, bu durumda sistem sadece düşey yöndeki kenarları tanır ve yatay yöndeki
kenarlara ise cevap vermez.Sobel kenar detektörü 1. kısmi türevlere dayanır. Aşağıdaki
maskeyi kullanır. Başka bir değişle maske ortasına denk gelen pikselin gradienti
komşularda gözönüne alınarak aşağıdaki gibi hesaplanır.
g>T ise f(x,y) pikseli bir kenar pikselidir.
Şekil 5.12. Kenarı Belirlenmiş Resim [9]
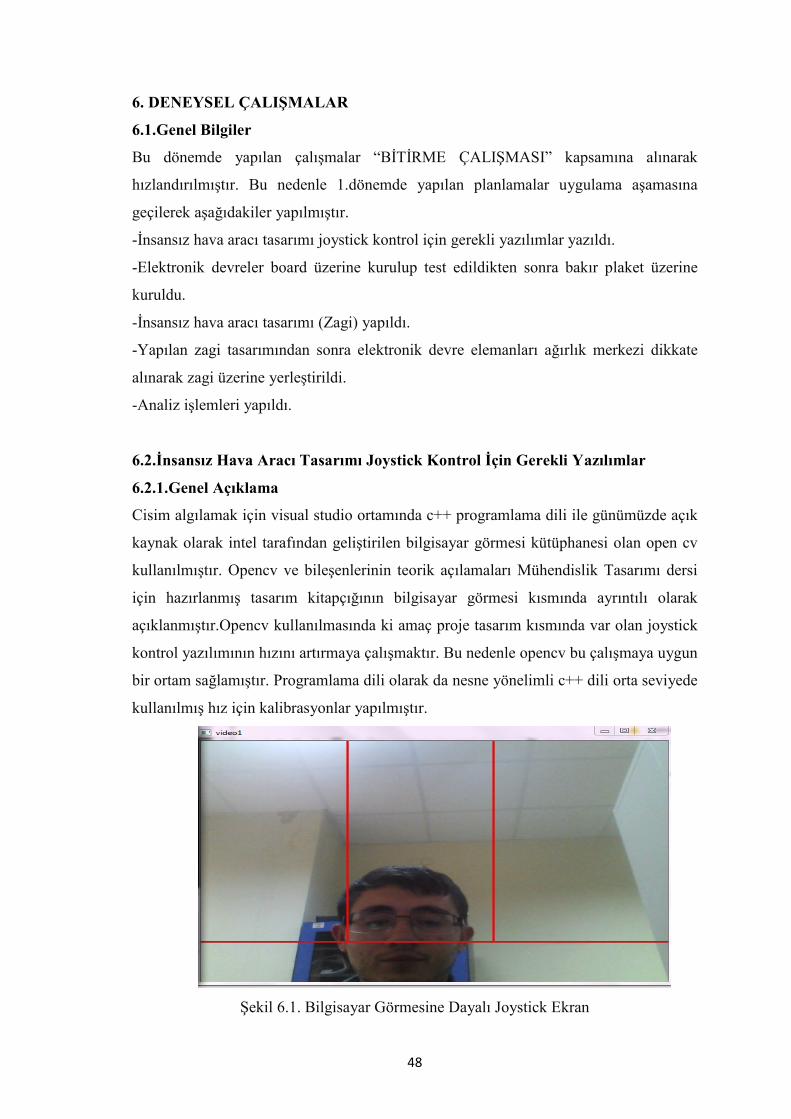
48
6. DENEYSEL ÇALIŞMALAR
6.1.Genel Bilgiler
Bu dönemde yapılan çalışmalar “BİTİRME ÇALIŞMASI” kapsamına alınarak
hızlandırılmıştır. Bu nedenle 1.dönemde yapılan planlamalar uygulama aşamasına
geçilerek aşağıdakiler yapılmıştır.
-İnsansız hava aracı tasarımı joystick kontrol için gerekli yazılımlar yazıldı.
-Elektronik devreler board üzerine kurulup test edildikten sonra bakır plaket üzerine
kuruldu.
-İnsansız hava aracı tasarımı (Zagi) yapıldı.
-Yapılan zagi tasarımından sonra elektronik devre elemanları ağırlık merkezi dikkate
alınarak zagi üzerine yerleştirildi.
-Analiz işlemleri yapıldı.
6.2.İnsansız Hava Aracı Tasarımı Joystick Kontrol İçin Gerekli Yazılımlar
6.2.1.Genel Açıklama
Cisim algılamak için visual studio ortamında c++ programlama dili ile günümüzde açık
kaynak olarak intel tarafından geliştirilen bilgisayar görmesi kütüphanesi olan open cv
kullanılmıştır. Opencv ve bileşenlerinin teorik açılamaları Mühendislik Tasarımı dersi
için hazırlanmış tasarım kitapçığının bilgisayar görmesi kısmında ayrıntılı olarak
açıklanmıştır.Opencv kullanılmasında ki amaç proje tasarım kısmında var olan joystick
kontrol yazılımının hızını artırmaya çalışmaktır. Bu nedenle opencv bu çalışmaya uygun
bir ortam sağlamıştır. Programlama dili olarak da nesne yönelimli c++ dili orta seviyede
kullanılmış hız için kalibrasyonlar yapılmıştır.
Şekil 6.1. Bilgisayar Görmesine Dayalı Joystick Ekran
49
Tablo 6.1. Teorik konsol ekranı
Şekil 6.1. de belirlenen konsol ekranı kırmızı renkli bir cismin koordinatlarını alarak araç
iletişim birimine aktarımı sağlamaktır.
inRange(kirmizi, Scalar(0, 150, 180), Scalar(0, 255, 255), kirmizi1);//kırmızı renk tanımı
inRange(kirmizi, Scalar(160, 100, 100), Scalar(179, 255, 255), kirmizi2);//kırmızı renk tanımı
Yukarıdaki kodlardan da anlaşılacağı üzere kırmızı renkli bir cisim tanıması yapılarak
video da algılanan cismin alanı çizdirilip bu alanın koordinat merkezi alınarak konsol
ekranındaki koordinat ekseni içerisinde aktif olması sağlanmıştır. Araç iletişim birimi ile
seri haberleşme protokolleri kullanılarak iletişim sağlanmıştır.
6.2.2.Yazılım hakkında bilgi
Zagi kontrol biriminin yazılımı analiz işlemlerinden dolayı önem arz ettiğinden ilk olarak
o açıklanacaktır
Şekil 6.2.Zagi Kontrol Birimi Yazılım Uygulaması
Motor çalışma
Sol hareket
Sağ ve sol
Referans
Bölgesi
Motor
çalışma
Motor çalışma
Sağ hareket
Motor durdurma

50
Şekil 6.2 de görüldüğü gibi sisteme servotimer2 ve virtualwire kütüphaneleri eklenmiştir.
Kütüphaneleri kısaca açıklayacak olursak;
Servotimer2 kütüphanesini eklemekteki amacımız servo kütüphanesini kullanarak çalışan
virtualwire(rf haberleşme) kütüphanesidir. Servo kütüphanesi genellikle timer bir
üzerinden zamanlanarak sinyal oluşturması nedeniyle servotimer2 kütüphanesi servo
motor ve fırçasız dc motor kontrolü için kullanılmıştır. Burda ki kütüphanelerin farkları
motorlara gönderilen değerlerin servo kütüphanesinde derece cinsindeyken servotimer2
kütüphanesinde rpm olduğu kanıtlanmış ve uygulanmıştır. Servo motorların acı değeri
yaklaşık 90 derece, fırçasız dc motorun rpm değeri ise 1500 rpm dir. Motorların
haberleşme siteminde kodlama sistemi kullanılmıştır. Kodlama sistemi bilgisayar
görmesine dayalı joystick kontrol yazılımı ve araç iletişim biriminden itibaren
oluşturulmuştur.
Şekil 6.3.Araç İletişim Birimi Yazılım Uygulaması
Araç iletişim birimine gelen kodlama mantığı bilgisayar görmesine dayalı joystick
kontrol yazılımı içerisinde oluşturulmuştur. Örneğin kontrol ekranında algılanan cismin
koordinatları belirlenen şartlara göre 1 2 3 4 rakamları ile kodlanmıştır. Mesela zaginin
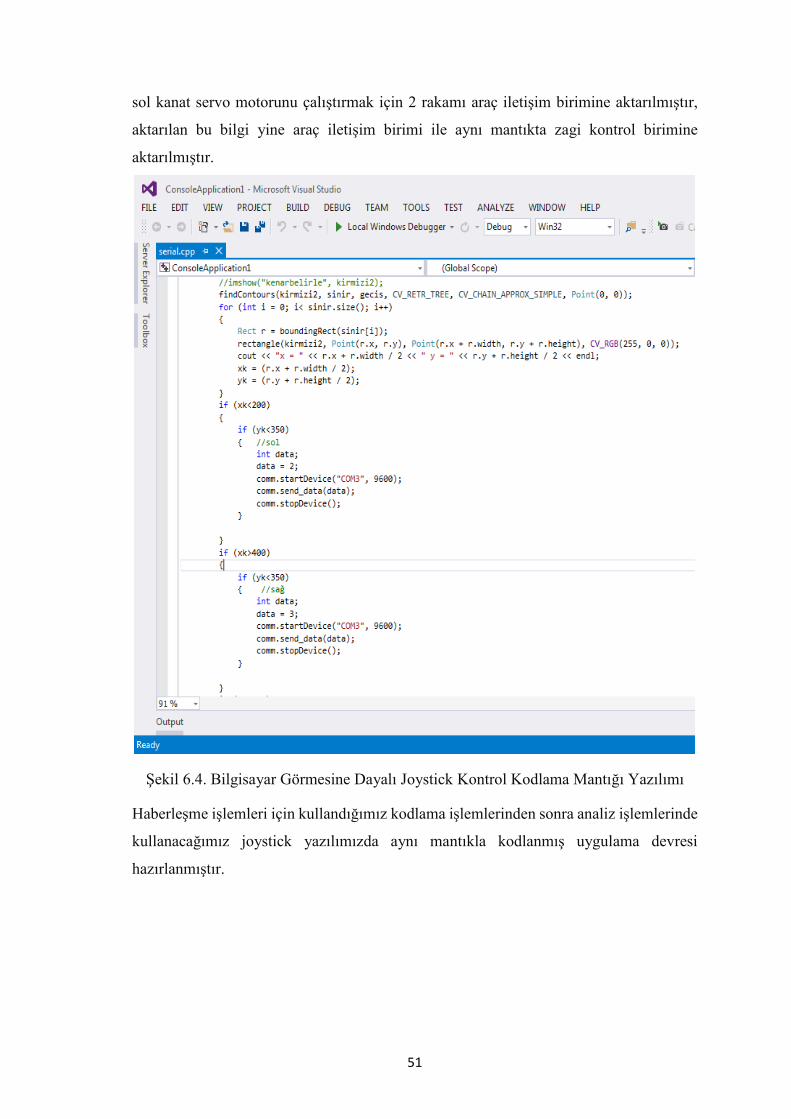
51
sol kanat servo motorunu çalıştırmak için 2 rakamı araç iletişim birimine aktarılmıştır,
aktarılan bu bilgi yine araç iletişim birimi ile aynı mantıkta zagi kontrol birimine
aktarılmıştır.
Şekil 6.4. Bilgisayar Görmesine Dayalı Joystick Kontrol Kodlama Mantığı Yazılımı
Haberleşme işlemleri için kullandığımız kodlama işlemlerinden sonra analiz işlemlerinde
kullanacağımız joystick yazılımızda aynı mantıkla kodlanmış uygulama devresi
hazırlanmıştır.
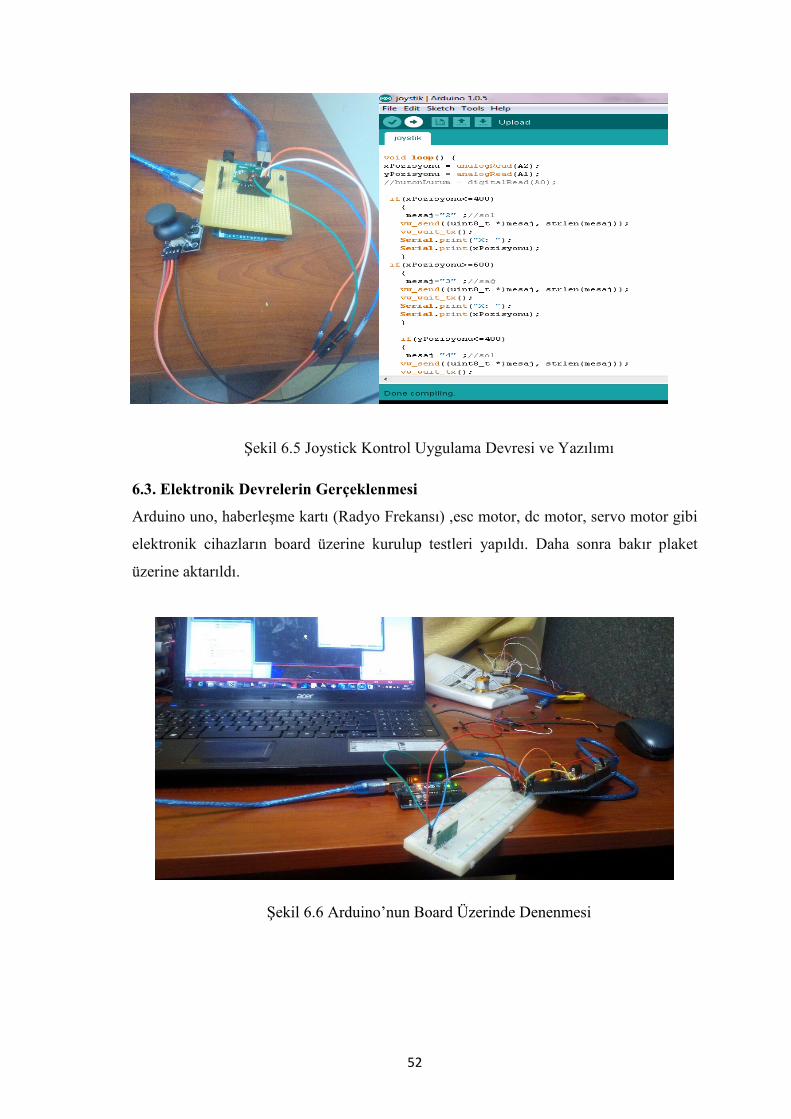
52
Şekil 6.5 Joystick Kontrol Uygulama Devresi ve Yazılımı
6.3. Elektronik Devrelerin Gerçeklenmesi
Arduino uno, haberleşme kartı (Radyo Frekansı) ,esc motor, dc motor, servo motor gibi
elektronik cihazların board üzerine kurulup testleri yapıldı. Daha sonra bakır plaket
üzerine aktarıldı.
Şekil 6.6 Arduino’nun Board Üzerinde Denenmesi

53
Şekil 6.7. Baskı Devreye Aktarma
Şekil 6.8. Motorların Denenmesi
Araç iletişim birimi olarak atmega 2560 kullnılmıştır. Atmega 2560 adıyla anılan arduino
MEGA endüstriyel uygulamalarda kullanılmaya başlanmasıyla tanınmış bir mikrokontrol
kartıdır. MEGA in özellikleri ve içyapısı Mühendislik Tasarımı dersi için hazırlanmış
tasarım tez kitapçığının mikroişlemciler bölümünde açıkça anlatılmıştır. İletişim
biriminin gerçekleştirdiği durumlar kısaca konsol ekranından gelen koordinat bilgilerini
araca kablosuz(RF) aktarmaktır.
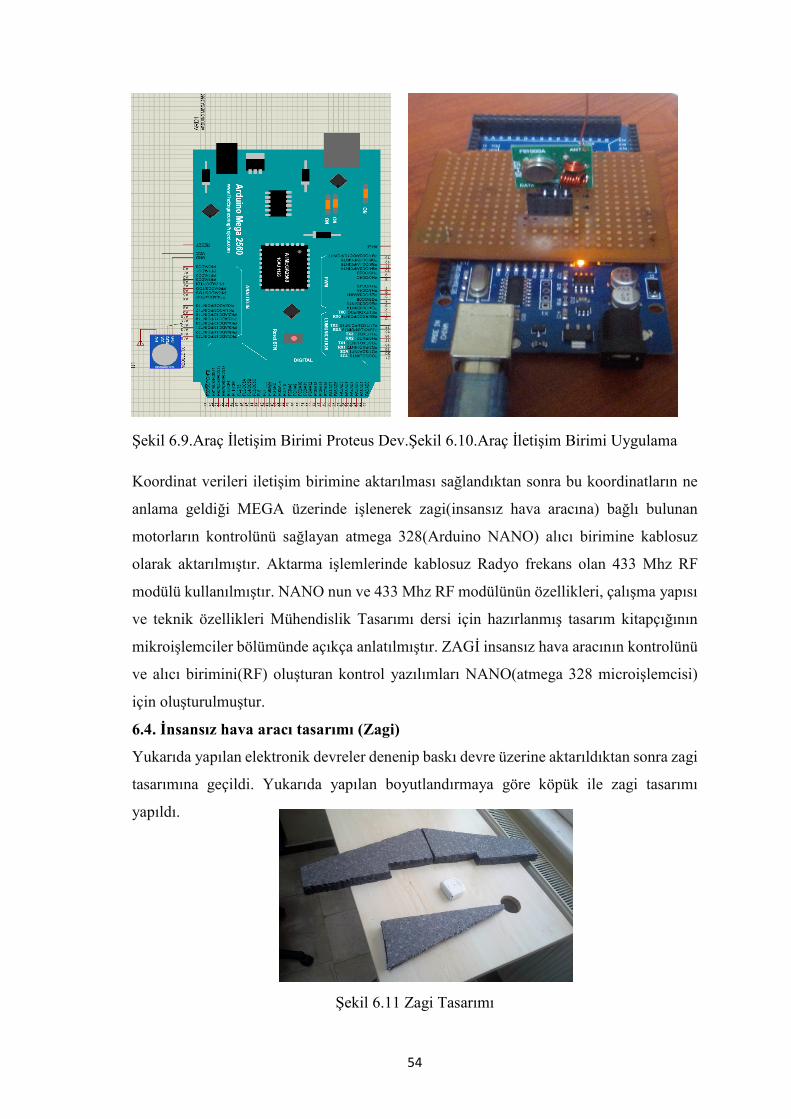
54
Şekil 6.9.Araç İletişim Birimi Proteus Dev.Şekil 6.10.Araç İletişim Birimi Uygulama
Koordinat verileri iletişim birimine aktarılması sağlandıktan sonra bu koordinatların ne
anlama geldiği MEGA üzerinde işlenerek zagi(insansız hava aracına) bağlı bulunan
motorların kontrolünü sağlayan atmega 328(Arduino NANO) alıcı birimine kablosuz
olarak aktarılmıştır. Aktarma işlemlerinde kablosuz Radyo frekans olan 433 Mhz RF
modülü kullanılmıştır. NANO nun ve 433 Mhz RF modülünün özellikleri, çalışma yapısı
ve teknik özellikleri Mühendislik Tasarımı dersi için hazırlanmış tasarım kitapçığının
mikroişlemciler bölümünde açıkça anlatılmıştır. ZAGİ insansız hava aracının kontrolünü
ve alıcı birimini(RF) oluşturan kontrol yazılımları NANO(atmega 328 microişlemcisi)
için oluşturulmuştur.
6.4. İnsansız hava aracı tasarımı (Zagi)
Yukarıda yapılan elektronik devreler denenip baskı devre üzerine aktarıldıktan sonra zagi
tasarımına geçildi. Yukarıda yapılan boyutlandırmaya göre köpük ile zagi tasarımı
yapıldı.
Şekil 6.11 Zagi Tasarımı

55
Zagi birimi için tasarlanan birinci bölümdeki similasyon uygulamasında zagi üzerindeki
ağırlıkların artması ve herhangi bir haberleşme kopması durumunda, güc kaybı vb
nedenlerden dolayı sıcaklık, ısı ve gösterge sistemleri çıkartılıp zamanlama işlemlerinde
nano timer kullanımı ile yapılarak güvenlik tedbirleri artırılmışlardır. Bu neden projenin
asıl amacı olan joystick kontrolünün motorlar üzerindeki etkileri analiz edilmektedir. Bu
yüzden tasarım kısmında yapılan sıcaklık, nem, zamanlayıcı sensorleri ağılık
oluşturduğundan çıkarılmış ve rf haberleşme sensörleri eklenmiştir. Motor kontrolleri ve
haberleşme sınyallarinin kontrolleri ise arduino nano(atmel 328 ) in içerisinde bulunan
kendi iç timerları ile kontol edilmiştir.
Şekil 6.12.Zagi Birimi Proteus Devresi Şekil 6.13.Zagi Birimi Ares Devresi
Şekil 6.14.Zagi Birimi Uygulama Devresi

56
6.5. Zagi Üzerine Elektronik Elemanların Yerleştirilmesi
Elektronik devreler baskı devre yapılıp birleştirildikten sonra köpük ile yapılan zagi
tasarımının üzerine yerleştirildi. Yerleştirme işlemleri zaginin uçuşu esnasında herhangi
bir denge problemi en aza indirilmeye çalışılmıştır.
Şekil 6.15. Elemanların Yerleştirilmesi
Şekil 6.16. Elemanların Yerleştirilmesi

57
7. SONUÇLAR
7.1. Genel Açıklamalar
İHA’nın kontrol yazılımında gerekli olan tanımlamalar yapılarak sisteme entegre
edilmiştir. Sistemimizde kullanılan motorların mekanik kayıpları dikkate alınmıştır. Alım
yapılan kalemler, adetler, fiyatlar ve kullanıldığı yerler aşağıda verilmiştir.
Tablo 7.1.Alınan Malzemeler Alınan Malzemeler Adet Fiyat Kullanılma Yeri
*2 Eksenli Joystick Kartı 1 KDV Dahil Birim Fiyat: 0,99USD Konsol tasarımı
*433 MHz RF Kablosuz Verici(Transmitter) 1 KDV Dahil Birim Fiyat: 0,63USD Konsol tasarımı
*9045 Kırmızı Plastik CW/CCW Pervane Seti 1 KDV Dahil Birim Fiyat: 1,75USD Zagi tasarımı
*433 MHz RF Kablosuz Alıcı(Reciver) 1 KDV Dahil Birim Fiyat: 0,63USD Zagi tasarımı
*12A ESC - Fırçasız Motor Sürücü Modülü 1 KDV Dahil Birim Fiyat: 13,59USD Zagi tasarımı
*Emax Xa2212 1400Kv Multirotor Fırçasız Motor 1 KDV Dahil Birim Fiyat: 15,86USD Zagi tasarımı
*SKY RC LiPo (2-3S) Şarj Aleti 1 KDV Dahil Birim Fiyat: 25,07USD Zagi tasarımı
*11,1V Lipo Batarya 2250mAh 25C 1 KDV Dahil Birim Fiyat: 25,13USD Zagi tasarımı
*Arduino Nano Klon - USB Kablo Hediyeli - (USB Chip
CH340)
3 KDV Dahil Birim Fiyat: 5,10USD Zagi tasarımı
*Arduino Micro (Klon) 1 KDV Dahil Birim Fiyat: 16,07USD Zagi tasarımı
*Tower Pro SG90 RC Mini Servo Motor 3 KDV Dahil Birim Fiyat: 2,83USD Zagi tasarımı
*Arduino Mega Temel Başlangıç Kiti 1 KDV Dahil Birim Fiyat: 81,42USD Konsol tasarımı
*Prolink Siyah İnce HDMI Kablo PB358B-0150 1 KDV Dahil Birim Fiyat: 9,09USD Açık kaynak olarak konsol tasarımı
*Raspberry Pi 3 1 KDV Dahil Birim Fiyat: 162,84TL Açık kaynak olarak konsol tasarımı
*Resmi Raspberry Pi 3/2/B+ Adaptörü 1 KDV Dahil Birim Fiyat: 12,39USD Açık kaynak olarak konsol tasarımı
*1X40 180 Derece Dişi Pin Header 5 KDV Dahil Birim Fiyat: 0,15USD Açık kaynak olarak konsol tasarımı
*Wireless NRF24L01+ 2.4GHz Transceiver Modül - 2.4GHz
Alıcı Verici Modül
1 KDV Dahil Birim Fiyat: 1,13USD Açık kaynak olarak konsol tasarımı
*Havya-Lehim Temizleme Süngeri 1 KDV Dahil Birim Fiyat: 0,71USD Zagi tasarımı
*Arduino ve Raspberry PI ile Nesnelerin İnterneti - Gökhan
Dökmetaş
2 KDV Dahil Birim Fiyat: 20,00TL Açık kaynak olarak konsol tasarımı
*Arduino Stackable Header 10 Pin - Arduino Shield
Konnektörü
5 KDV Dahil Birim Fiyat: 0,09USD Zagi tasarımı
*ESP8266 ve Arduino ile Nesnelerin İnterneti - Hasbi Sevinç 1 KDV Dahil Birim Fiyat: 16,00TL Açık kaynak olarak konsol tasarımı
*Edding 147 S Siyah Baskı Devre Kalemi(İnce Uç - Silgili) 1 KDV Dahil Birim Fiyat: 4,72TL Zagi tasarımı
*Raspberry Pi ve Python ile IoT Uygulamaları - Güray
Yıldırım
1 KDV Dahil Birim Fiyat: 18,75TL Açık kaynak olarak konsol tasarımı
*Arduino Başlangıç Seti 1 KDV Dahil Birim Fiyat: 59,00TL Zagi tasarımı
*Mini El Matkap Seti 1 KDV Dahil Birim Fiyat: 20,06USD Zagi tasarımı
*7,4V Lipo Batarya 1750mAh 25C 1 KDV Dahil Birim Fiyat: 15,72USD Zagi tasarımı
*GP Ultra 9V Pil 1 KDV Dahil Birim Fiyat: 2,36USD Zagi tasarımı
*Hafif Tekerlek 4 KDV Dahil Birim Fiyat: 1,35USD Zagi tasarımı
*6 V 150mA Güneş Pili - Solar Panel 105x66mm 1 KDV Dahil Birim Fiyat: 6,49USD Araştırma amaçlı
*8mm Banana Plug (3lü Set) 1 KDV Dahil Birim Fiyat: 3,98USD Zagi tasarımı
*GP Ultra 1.5V AA Kalem Pil - 12′li Ekonomik Paket 2 KDV Dahil Birim Fiyat: 4,16USD Zagi tasarımı
*T Plug Yüksek Akım Konektör Seti (40-80A) 2 KDV Dahil Birim Fiyat: 0,54USD Zagi tasarımı
*3,2′′ Raspberry Pi Dokunmatik LCD Ekran (Birincil Ekran) 1 KDV Dahil Birim Fiyat: 31,86USD Açık kaynak olarak konsol tasarımı
*Ağırlık Sensörü - Load Sensor 2 KDV Dahil Birim Fiyat: 2,02USD Zagi tasarımı
*Ağırlık Sensör Kuvvetlendirici - Load Cell Amplifier -
HX711
2 KDV Dahil Birim Fiyat: 1,26USD Zagi tasarımı
*ESP8266 Ekonomik Wifi Serial Transceiver Module 2 KDV Dahil Birim Fiyat: 4,13USD Açık kaynak olarak konsol tasarımı
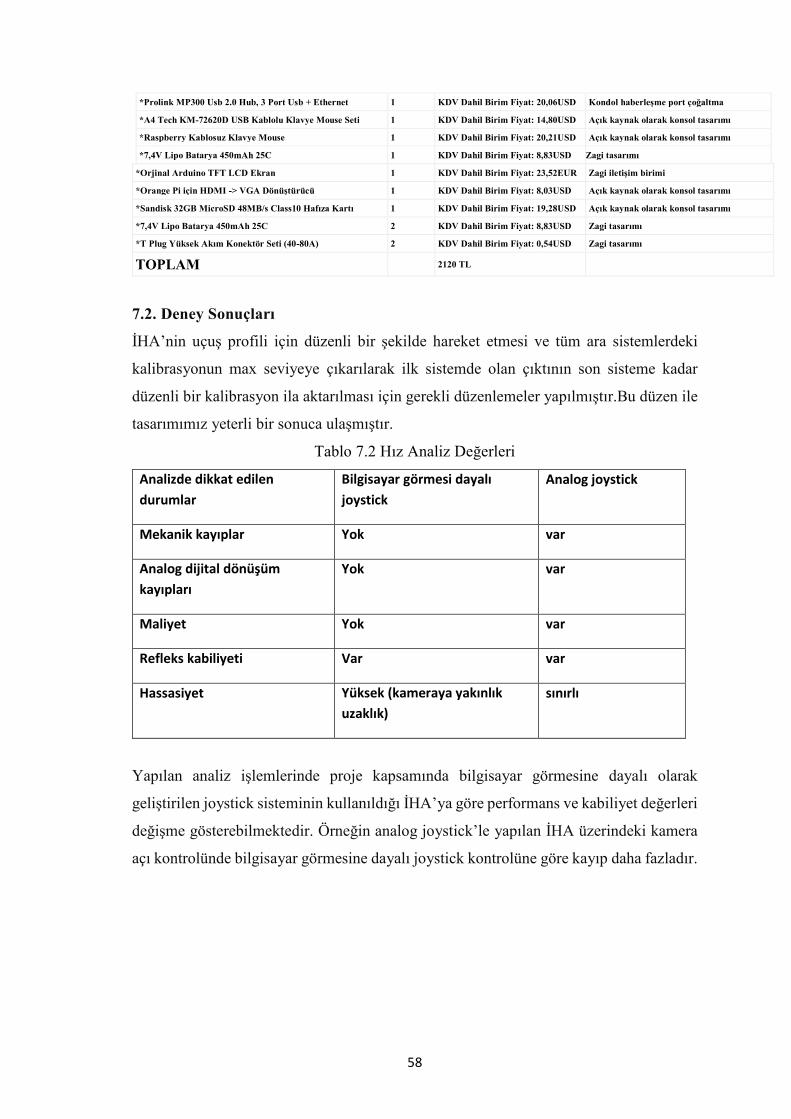
58
*Prolink MP300 Usb 2.0 Hub, 3 Port Usb + Ethernet 1 KDV Dahil Birim Fiyat: 20,06USD Kondol haberleşme port çoğaltma
*A4 Tech KM-72620D USB Kablolu Klavye Mouse Seti 1 KDV Dahil Birim Fiyat: 14,80USD Açık kaynak olarak konsol tasarımı
*Raspberry Kablosuz Klavye Mouse 1 KDV Dahil Birim Fiyat: 20,21USD Açık kaynak olarak konsol tasarımı
*7,4V Lipo Batarya 450mAh 25C 1 KDV Dahil Birim Fiyat: 8,83USD Zagi tasarımı
*Orjinal Arduino TFT LCD Ekran 1 KDV Dahil Birim Fiyat: 23,52EUR Zagi iletişim birimi
*Orange Pi için HDMI -> VGA Dönüştürücü 1 KDV Dahil Birim Fiyat: 8,03USD Açık kaynak olarak konsol tasarımı
*Sandisk 32GB MicroSD 48MB/s Class10 Hafıza Kartı 1 KDV Dahil Birim Fiyat: 19,28USD Açık kaynak olarak konsol tasarımı
*7,4V Lipo Batarya 450mAh 25C 2 KDV Dahil Birim Fiyat: 8,83USD Zagi tasarımı
*T Plug Yüksek Akım Konektör Seti (40-80A) 2 KDV Dahil Birim Fiyat: 0,54USD Zagi tasarımı
TOPLAM 2120 TL
7.2. Deney Sonuçları
İHA’nin uçuş profili için düzenli bir şekilde hareket etmesi ve tüm ara sistemlerdeki
kalibrasyonun max seviyeye çıkarılarak ilk sistemde olan çıktının son sisteme kadar
düzenli bir kalibrasyon ila aktarılması için gerekli düzenlemeler yapılmıştır.Bu düzen ile
tasarımımız yeterli bir sonuca ulaşmıştır.
Tablo 7.2 Hız Analiz Değerleri
Analizde dikkat edilen
durumlar
Bilgisayar görmesi dayalı
joystick
Analog joystick
Mekanik kayıplar Yok var
Analog dijital dönüşüm
kayıpları
Yok var
Maliyet Yok var
Refleks kabiliyeti Var var
Hassasiyet Yüksek (kameraya yakınlık
uzaklık)
sınırlı
Yapılan analiz işlemlerinde proje kapsamında bilgisayar görmesine dayalı olarak
geliştirilen joystick sisteminin kullanıldığı İHA’ya göre performans ve kabiliyet değerleri
değişme gösterebilmektedir. Örneğin analog joystick’le yapılan İHA üzerindeki kamera
açı kontrolünde bilgisayar görmesine dayalı joystick kontrolüne göre kayıp daha fazladır.
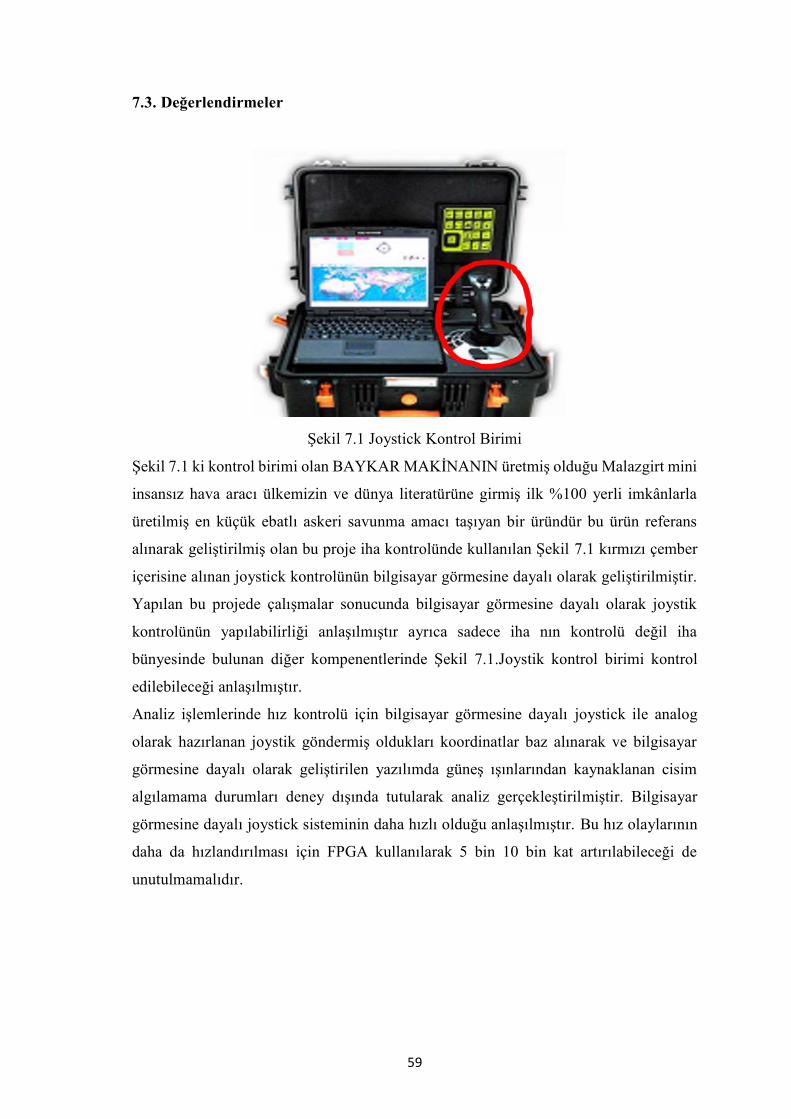
59
7.3. Değerlendirmeler
Şekil 7.1 Joystick Kontrol Birimi
Şekil 7.1 ki kontrol birimi olan BAYKAR MAKİNANIN üretmiş olduğu Malazgirt mini
insansız hava aracı ülkemizin ve dünya literatürüne girmiş ilk %100 yerli imkânlarla
üretilmiş en küçük ebatlı askeri savunma amacı taşıyan bir üründür bu ürün referans
alınarak geliştirilmiş olan bu proje iha kontrolünde kullanılan Şekil 7.1 kırmızı çember
içerisine alınan joystick kontrolünün bilgisayar görmesine dayalı olarak geliştirilmiştir.
Yapılan bu projede çalışmalar sonucunda bilgisayar görmesine dayalı olarak joystik
kontrolünün yapılabilirliği anlaşılmıştır ayrıca sadece iha nın kontrolü değil iha
bünyesinde bulunan diğer kompenentlerinde Şekil 7.1.Joystik kontrol birimi kontrol
edilebileceği anlaşılmıştır.
Analiz işlemlerinde hız kontrolü için bilgisayar görmesine dayalı joystick ile analog
olarak hazırlanan joystik göndermiş oldukları koordinatlar baz alınarak ve bilgisayar
görmesine dayalı olarak geliştirilen yazılımda güneş ışınlarından kaynaklanan cisim
algılamama durumları deney dışında tutularak analiz gerçekleştirilmiştir. Bilgisayar
görmesine dayalı joystick sisteminin daha hızlı olduğu anlaşılmıştır. Bu hız olaylarının
daha da hızlandırılması için FPGA kullanılarak 5 bin 10 bin kat artırılabileceği de
unutulmamalıdır.

60
KAYNAKLAR
[1]. Wang L., Chen F., Yin H. “Detecting and tracking vehicles in traffic by unmanned aerial
vehicles”, Automation in Construction”, Vol. 72, (2016), pp. 294-308.
[2]. Weng L.,Liu Q.,Xia M. “ımmune network-based swarm based swarm intelligence and its
application to unmanned aerial vehicle (UAV) swarm coordination”,
“Neurocomputing”,Vol. 125, (2014), pp. 134-141.
[3]. Antonio L.Fernandes Jr.Walter E.Medeiros.,Francisco H.R.Bezerra,Josibel G.Oliveira Jr.,C
aroline L.Cazarin“GPR investigation of karst guided by comparison with outcrop and unm
anned aerial vehicle imagery”,“Journal of Applied Geophysics”,Vol.112,(2015),pp.268-378.
[4]. http://akizilkaya.pamukkale.edu.tr/B%C3%B6l%C3%BCm4_goruntu_isleme.pdf
[5]. http://www.aksam.com.tr/ekonomi/ihalara-50-metre-c2siniriyla-kayit/haber-492598
[6]. Bradski, G. and Kaehler, A., “Learning OpenCV: Computer Vision with the OpenCV
Library”, O’Reilly Media, Amerika Birleşik Devletleri, 16-17 (2008).
[7]. Turkcell.“bilgisayar”.15 Mart 2017 tarihinde erişildi.www.turkcebilgi.com/mikrobilgisayar
[8]. Xilink,”FPGA”,10 mart 2017,http://fpganedir.com/FPGA
[9]. Damlakayalı,”teknolojihaberi”,12 Mart 2017 tarihinde erişildi.http://yazilimdakadineli. com
/genel/spn-sifreleme-algoritmasi/
[10]. Robotik sistem,”mikrodenetleyici”,12 Şubat 2017 tarihinde erişildi,http://robotiksistem.
com/arduino_nano_v3.html
[11]. http://web.firat.edu.tr/iaydin/bmu357/bmu_357_bolum7.pdf
[12]. Fatih başarış,”sensorler”,23 Şubat 2017 tarihinde erişildi.http://www.elektrohobim.com/
index.php/arduino/sensorler/dht-11
[13]. https://besvolt.wordpress.com/2015/09/13/arduinoda-kullanabilecegimiz-nem-ve-sicaklik-s
ensorleri-dht11-dht21-dht22-karsilastirmasi/
[14]. Bkaakco,“derleyici”,30 Ocak 2017 tarihinde erişildi.http://bkaakco.blogspot.com.tr/2014/07
/visual-studio-nedir-ne-ise-yarar.html
[15]. Azat baydar,”c programlama”,24 Şubat 2017 tarihinde erişildi.https://baybarsyazilim.Word
press.com/category/c-2/
[16]. Jim grimes,”3d catia”,4 Nisan 2017 tarihinde erişildi.http://wp.3dcatia.com/catia-v5-r21-
bilgi-makalesi-2/
[17]. Mesut pişkin,”edge detection”,5 Nisan 2017 tarihinde erişildi.http://docs.opencv.org/2.4/do
c/tutorials/tutorials.html
[18]. http://www.filesonic.com/file/2464119881/Introduction_to_Autonomous_Mobile_Robots_
(Siegwart,_Nourbakhsh_2004).pdf
[19]. Serdar Yılgın.“ Mıssıon Plannıng For Unmanned Aerıal Vehıcle (Uav) Teams”, “In Partıal
Fulfıllment Of The Requırements For The Degree Of Master Of Scıence In Computer
Engıneerıng”, Master Bitirme Tezi, September, (2014).
[20]. Anıl Can Birdal.“ Determınatıon Of Tree Heıghts Usıng Unmanned Aır Vehıcles”, “Anadolu
University Graduate School Of Science”,Bitirme Tezi, July , (2016).
[21]. ieee-ies.org/resources/media/about/history/ieee_codeofethics.pdf
61
EKLER
EK-1_Standartlar_ve_Kisitlar_Formu
EK-2_IEEE_Etik_Kurallari__IEEE_Code_of_Ethics_TR
Yazılım kod örnekleri(CD)

62
STANDARTLAR VE KISITLAR FORMU
1. Çalışmanın amacını özetleyiniz.
Sol tarafta Şekil 1 de ki kontrol birimi olan BAYKAR
MAKİNANIN üretmiş olduğu Malazgirt mini insansız hava
aracı ülkemizin ve dünya literatürüne girmiş ilk %100 yerli
imkânlarla üretilmiş en küçük ebatlı askeri savunma amacı
taşıyan bir üründür bu ürün referans alınarak geliştirilmiş olan
bu proje iha kontrolünde kullanılan Şekil 1 kırmızı çember
içerisine alınan joystick kontrolünün bilgisayar görmesine
dayalı olarak geliştirilmiştir. Yapılan bu projede çalışmalar
sonucunda bilgisayar görmesine dayalı olarak joystik
kontrolünün yapılabilirliği anlaşılmıştır ayrıca sadece iha nın
kontrolü değil iha bünyesinde bulunan diğer
kompenentlerinde kontrol edilebileceği anlaşılmıştır.
Şeki1.Joystik kontrol birimi
2. Çalışamnın tasarım boyutunu açıklayınız.
Çalışmamızın tasarım boyutu tamamen yeni bir proje niteliğindedir. Bu proje tübitak 2209-A üniversiteler
arası öğrenci yurt içi araştırma projesi kapsamında destek alınarak geliştirilmiş ve amaç kısmında belirtilen
baykar makinaya ağit kontrol ünitesi referans alınarak %85 oranında özgün olarak gerçekleştirilmiştir.
3. Bu çalışmada bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Bu proje kapsamında insansız hava araçlarının kaza oranlarının % 25 konsoldan kaynaklandığı %17 insan
faktöründen kaynaklandığı bilim adamlarınca kanıtlanmıştır. Konsol ve insan faktörlerinin toplamı %42 lik
bi kaza hata oranı %3 lük bir hata oranını kabul etmeyen mühendislik için buyuk bir orandır. Bu alanla
alakalı çalışma yaptığımız bu çalışma hata oranını azaltmaya ve hız oranını artırmaya yönelik olarak
çalışma yapılmış ve tasarladığımız kendi aracımızda %15 oranında hata oranı azaltırlmıştır.
4. Çalışmada kullandığınız yöntemler nelerdir ve önceki derslerde edindiğiniz hangi bilgi ve
becerileri kullandınız? Açıklayınız.
Proje kapsamında genellikle kullandığımız yöntemler teknik yönde uygulama gerektiren el bererileri ile
mühendislik uygulamaraının birleşmesidir. Proje kapsamında kullandığımız dersler mühendislik
yazılımları, programlama, sayısal analiz, haberleşme, sayısal devre tasarımı, mikrobilgisayarlı sistem
tasarımı, gerçek zamanlı işaret işleme uygulamaları ve güç elektroniği derlerinde öğrenilmiş olan teknik ve
teorik bilgiler uygulanmıştır.
5. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Proje kapsamında kullandığımız mühendislik standartları hız, kontrol, özgün değer, karmaşık sistemlerin
çözülmesinde kullandığımız yöntemler ve mühendislik yaklaşımıdır.
Fırçasısz dc motor standarlarının içerisinde olan 1500 rpm olarak timer2 ile kontrol edilmiştir.
Lipopil batarya 7,4 volt 450 mAh olarak ayarlanmış 6,4 voltun altına düşmeyecek şekilde
tasarlanmıştır.
Zagi tipi insansız hava aracı sivil havacılık genel müdürlüğün belirlemiş olduğu 0-500 mg
altındaki araçların kayıt işleminin olmaması durumu göz önünde bulundurularak sistem
tasarlanmıştır.
Yazılım standarları opencv nin belirlemiş olduğu opencl ekran kartlarının iç mimarisine uygun
olarak yazılmıştır.
100mm erkek-erkek kablo kullanılmıştır.
63
6. Kulandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir? Lütfen çalışmanıza uygun
yanıtlarla doldurunuz.
a) Ekonomi
Proje kapsamında tübitakın sağalmış olduğu 2209 –A üniversite öğrencileri yurt içi araştırma
projeleri destekleme programı bazında kazanmış olduğum lisans araştırma bursu ile proje
ekonomisi planlı bir şekilde yapılarak 2500 Tl olarak ayarlanmıştır.
b) Çevre sorunları:
Proje kapsamında tasarlanan prototip sivil havacılık genel müdürlüğünün belirlemiş olduğu
sıtandartlara göre yapılmış ve çevre sorunlarına yol açmayacak şekilde mühendislik
hesaplamalarıyla oluşturulmuştır.
Elektrik motorları kullanıldığından zehirli gazların oluşmaması.
Ağırlık aşımı olmadığından arıza halinde insan sağlığına zarar vermemesi.
Sivil havacılık kurallarına dâhil edilerek tasarlanmış olması.
c) Sürdürülebilirlik:
Proje araştırma amacıyla sürdürülebilirliği olan bir projedir.
Cisim tanıması yerine insan el hareketleri ile insansız hava aracının kontrolü.
İnsansı özelliklerin insansız hava aracına aktarılabileceğinin kanıtlanması.
d) Üretilebilirlik:
Proje prototip olarak yapılmış üretilebilirliği kanıtlanmıştır
e) Etik:
Proje etik çalışma kapsamında değildir.
f) Sağlık:
Proje olumsuz sağlık sorunlarına yol açmamaktadır. Bu konuda sivil havacılık genel
müdürlüğünün belirlemiş olduğu sıtandartlar göz önüne alınarak insansız hava aracı
tasarlanmıştır.
g) Güvenlik:
Proje güvenlik açısında sivil havacılık genel müdürlüğünün belirlemiş olduğu standartlara göre
tasarlanmış insan ve çevreye zarar vermeyecek şekilde ağırlık büyüklük ebatları
sınırlandırılmıştır. İHA uçuşları, insan ve yapılardan en az 50 metre uzaklıkta
gerçekleştirilebilecek. Standartlar çerçevesinde, azami kalkış ağırlığı 500 gr ila 25 kg aralığında
olan İHA’ların ve bunları kullanacak pilotların SHGM tarafından oluşturulan internet tabanlı
'Kayıt Sistemi'ne kayıt edilmesi gerekmektedir. Bunun dışındaki azami kalkış ağırlığı 25 kg ile
150 kg aralığında olan ikinci gruptaki İHA’lar ile azami kalkış ağırlığı 150 kg ve daha fazla olan
İHA’ların Türk hava araçları tesciline kayıt yaptırmaları gerekiyor.
h) Sosyal ve politik sorunlar:
Proje Sosyal ve politik sorunlar açısında sivil havacılık genel müdürlüğünün belirlemiş olduğu
standartlara göre tüm sorunlar göz önüne alınarak dizayn edilmiştir. Sosyal ve politik sorunlara
yol açmamaktadır. sosyal açıdan insansız hava araçları günümüzde ülkemizde kullanılmaya ve
akademik araştırmalarda aktif olarak yer almaya devam ettiğinden bu alanda kullanılabilmesi
için insan sağlığı açısından dikkatli bir şekilde düzenlenmeye çalışılmıştır. Politika açısından
bakıldığında insasız hava araçları askeri alanlarda ülkeler arasında savunma sanayinde bir güç
oluşturmaktır. Bu teknolojilerinin geliştirilmesü ülkeler için önem arz ettiğinden bizim

64
ülkemizde yeni bi çalışma alanı kapsamı oluşturmaktatır. Bu alanda çalışma yapılan akademik
çalışmalara örnek olabilecek bir proje niteliği olan bir çalışmadır.
Çalışmanın Adı Zagi Tipi Bir İnsansız Hava Aracının (İHA) Tasarımı ve Bilgisayar
Görmesine Dayalı Olarak Kontrol Yazılımının Geliştirilmesi
Çalışmayı
Hazırlayan(lar)
Mehmet DEMİR
Bayram GÜNEŞ
Danışman Onayı Prof.Dr. Raşit KÖKER
65
IEEE Etik Kuralları IEEE Code of Ethics
IEEE üyeleri olarak bizler bütün dünya üzerinde teknolojilerimizin hayat standartlarını
etkilemesindeki önemin farkındayız. Mesleğimize karşı şahsi sorumluluğumuzu kabul
ederek, hizmet ettiğimiz toplumlara ve üyelerine en yüksek etik ve mesleki davranışta
bulunmayı söz verdiğimizi ve aşağıdaki etik kuralları kabul ettiğimizi ifade ederiz.
1. Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunu
kabul etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhal açıklamak;
2. Mümkün olabilecek çıkar çatışması, ister gerçekten var olması isterse sadece algı
olması, durumlarından kaçınmak. Çıkar çatışması olması durumunda, etkilenen
taraflara durumu bildirmek;
3. Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi ve dürüst
olmak;
4. Her türlü rüşveti reddetmek;
5. Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknoloji anlayışını
geliştirmek;
6. Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübe
olması veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları için
teknolojik sorumlulukları üstlenmek;
7. Teknik bir çalışma hakkında yansız bir eleştiri için uğraşmak, eleştiriyi kabul
etmek ve eleştiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkı
sunanların emeklerini ifade etmek;
8. Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih,
cinsiyet kimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumuna
girişmemek;
9. Yanlış veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerinin zarar
görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarının
oluşmasından kaçınmak;
10. Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmak ve
onları desteklemek.
IEEE Yönetim Kurulu tarafından Ağustos 1990’da onaylanmıştır.
66
IEEE Code of Ethics
We, the members of the IEEE, in recognition of the importance of our technologies in
affecting the quality of life throughout the world, and in accepting a personal obligation
to our profession, its members and the communities we serve, do hereby commit
ourselves to the highest ethical and professional conduct and agree:
1. to accept responsibility in making engineering decisions consistent with the
safety, health and welfare of the public, and to disclose promptly factors that might
endanger the public or the environment;
2. to avoid real or perceived conflicts of interest whenever possible, and to disclose
them to affected parties when they do exist;
3. to be honest and realistic in stating claims or estimates based on available data;
4. to reject bribery in all its forms;
5. to improve the understanding of technology, its appropriate application, and
potential consequences;
6. to maintain and improve our technical competence and to undertake technological
tasks for others only if qualified by training or experience, or after full disclosure
of pertinent limitations;
7. to seek, accept, and offer honest criticism of technical work, to acknowledge and
correct errors, and to credit properly the contributions of others;
8. to treat fairly all persons regardless of such factors as race, religion, gender,
disability, age, or national origin;
9. to avoid injuring others, their property, reputation, or employment by false or
mlicious action;
10. to assist colleagues and co-workers in their professional development and to
support them in following this code of ethics.
Approved by the IEEE Board of Directors
August 1990
67
ÖZGEÇMİŞ
Mehmet Demir
Kahramanmaraşın Onikişubat ilçesinde 15.03.1993 tarinde doğdum. İlköğrenim olarak
Süleyman Demirel İlköğretim Okulundan 2007 yılında mezun oldum. Aynı yıl Anadolu
Ticaret Meslek Lisesi Bilişim Teknolojileri bölümü Web Programlama dalına
kaydoldum, buradan 2011 yılında mezun oldum.2012 yılında Sakarya Üniversitesi
Teknoloji Fakültesi Elektrik- Elektronik Mühendisliğini kazandım, şuan son sınıf
öğrencisi olarak eğitimime devam etmekteyim. Ayrıca Teknoloji Fakültesi Mekatronik
Mühendisliği de çap öğrencisiyim.
Bayram Güneş
31 Mayıs 1993 yılında Kocaeli’nde doğdum. İlkokul yedinci sınıfa kadar Arslanbey
Şefkatiye İlköğretim okulunda okudum. Sekizinci sınıfı İzmit Ulugazi İlköğretim
okulunda tamamladım. Arslanbey Fevziye Tezcan Anadolu Teknik Lisesi Elektrik-
Elektronik bölümü Endüstriyel Bakım Onarım dalından mezun oldum.2012 yılında
Sakarya Üniversitesi Teknoloji Fakültesi Elektrik- Elektronik Mühendisliğinde
öğrenim görmeye başladım ve öğrenim halen devam etmektedir.
Recommended