
12
BAB 2
LANDASAN TEORI
2.1 Definsi Robot
Robot, kata “robot” berasal dari bahasa Czech yaitu “robota”, yang berarti
“kerja”. Kamus besar Webster memberikan definisi mengenai robot, yaitu “sebuah
peralatan otomatis yang melakukan pekerjaan seperti apa yang dilakukan manusia”.
Jenis Robot industrial ini cukup banyak. Salah satunya adalah robot yang
menyerupai manusia. contohnya lengan robot yang dibuat berdasarkan fungsi kerja
lengan manusia walaupun dapat diubah untuk kerja yang berlainan. namun konsep
pergerakannya mirip dengan lengan manusia. Karena dari hal ini dapat membuat robot
dapat lebih mudah dan fleksibel untuk berbagai jenis kerja. Berikut gambar dari
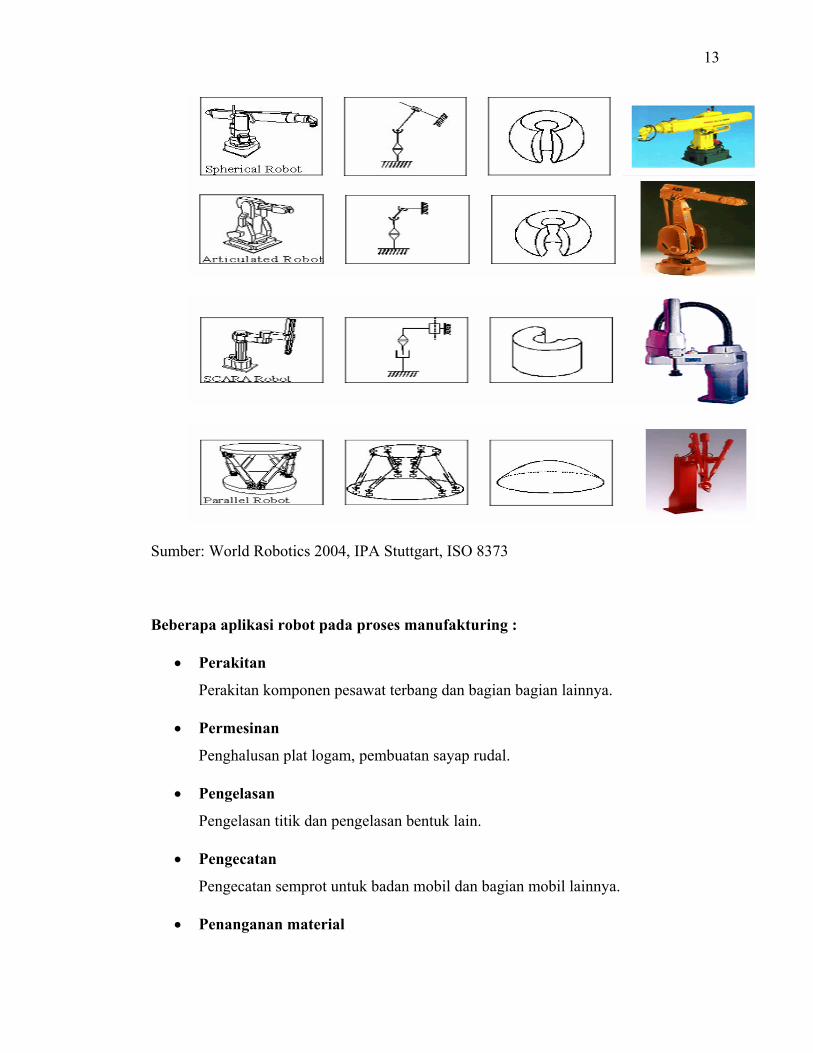
klasiifikasi industrial robot dilihat dari struktur mechanicanya.
Gambar 2.1 Klassifikasi industrial robot dilihat dari struktur mechanical
13
Sumber: World Robotics 2004, IPA Stuttgart, ISO 8373
Beberapa aplikasi robot pada proses manufakturing :
• Perakitan
Perakitan komponen pesawat terbang dan bagian bagian lainnya.
• Permesinan
Penghalusan plat logam, pembuatan sayap rudal.
• Pengelasan
Pengelasan titik dan pengelasan bentuk lain.
• Pengecatan
Pengecatan semprot untuk badan mobil dan bagian mobil lainnya.
• Penanganan material

14
Penumpukan suku cadang mobil dan penghantarannya.
• Lain - lain
Inspeksi produk, suku cadang dan ketahanan produk
Keuntungan nyata :
• Penghematan tenaga kerja.
• Meningkatkan kinerja produksi
• Kemampuan untuk diprogram ulang (re-program) membuat robot lebih fleksibel.
• Dapat membuat produksi kecil ditengah-tengah pekerjaan besar rutin.
• Produk baru dapat dikeluarkan dalam persiapan yang singkat.
2.1.1 Sekilas Tentang Spesisikasi Robot, Obyek, Focus dan Target Penelitian
Menurut Endra Pitowarno. 2005 Untuk mengetahui dalam tema apa saja robotik
dapat diteliti maka sebelumnya dapat mengilustrasikannya dahulu. Pada gambar 2.2
dijelaskan tentang keterkaitan seluruh komponen atau sub-domain dalam ruang lingkup
penelitian di bidang robotik. Secara garis besar penelitian di bidang robotik dapat
dilakukan dengan memilih tema berdasarkan alur dalam 4 tahapan, yaitu klasifikasi,
obyek penelitian, fokus penelitian dan target penelitian. Dari blok klarifikasi, struktur
robot dapat diketahui berada dalam kelompok mana. Dari sini, obyek penelitian dapat
ditentukan dan dijabarkan secara detil parameter-parameternya. Bisa dilihat pemaparan
gambar dibawah ini

15
Gambar 2.2 klasifikasi, obyek penelitian, fokus penelitian dan target penelitian
Sumber : Robotika, desain, kontrol dan kecerdasan buatan. Endra Pitowarno. 2005

16
2.1.2 Robot Berdasarkan Fungsi dan Sifat Mobolitasnya
Menurut International Federation of Robotics (IFR) fungsi robot dapat
diklasifikasikan ke dalam 2 bagian besar, yaitu :
a. Industrial Robot (robot industri) digunakan pada sektor industri seperti,
membantu dalam proses perakitan kendaraan, mengelas, dan sebagainya.
b. Service Robot berfungsi membantu manusia dalam membersihkan rumah,
membantu dokter melakukan operasi, menjadi pemandu wisata, dan lain-lain.
Definisi Robot Industri Menurut ISO
Organisasi standarisasi dunia melalui ISO 8373 mendefinisikan robot industry
sebagai “sebuah manipulator dengan tiga atau lebih sumbu, yang dikontrol secara
otomatis, yang dapat diprogram ulang, dengan banyak tujuan, di mana diletakkan
pada tempat yang tetap atau dapat bergerak untuk keperluan dan aplikasi-aplikasi
otomasi industri”.
Komponen Robot Industri
Berdasarkan Arthur J. Critchlow (1985, p19-22) komponen robot industri antara
lain:
a. Link dan Joint
Joint merupakan sumbu perputaran robot. Fungsi joint ini untuk
menghubungkin link – link yang terdapat pada robot industri. Link merupakan
salah satu bagian dari robot industri yang berfungsi untuk menjangkau area
robot. Panjnag link ditentukan sesuai fiungsi robot itu.
17
b. Wrist
Wrist merupakan sebuah penghubung antara end effector (hand) dan lengan
(arm) pada robot.
Wrist memiliki tiga pergerakan, antara lain:
• Pitch, pergerakan joint untuk naik dan turun.
• Yaw, pergerakan joint untuk menyamping kiri dan kanan.
• Roll, pergerakan joint untuk memutar.
c. End effector
End effector merupakan peralatan mekanik yang bisa digerakkan dan
dilekatkan pada ujung manipulator. End effector ini bisa berfungsi untuk
memegang dan memindahkan objek serta bisa juga melakukan proses
manufaktur seperti: mengecat mengelas, dan sebagainya.
d. Drive
Bagian ini merupakan sebagai media penggerak lengan robot. Bisa berupa
motor listrik, hidraulik motor, hidraulik silinder, pneumatic motor dan
sebagainya.
e. Controller merupakan bagian dari sistem yang berfungsi untuk mengatur
semua kegiatan yang terjadi pada robot. Bagian controller ini menggunakan
mikrokontroler atau mikroprosesor dan berisi control program dan task
program.
18
f. Sensor
Sensor berguna sebagai inputan robot untuk melihat atau mengukur posisi joint
sesuai posisi referensinya.
g. Interface
Interface berfungsi sebagai media komunikasi antara komputer dan robot.
Biasanya media komunikasi yang sering digunakan seperti RS-232.
2.2 Kinematika Dasar
Berdasarkan Fu, Gonzales dan Lee (1987, p6-13) adalah terdapat dua
permasalahan dalam mempelajari kinematika, yaitu adalah forward kinematic dam
inverse kinematic. Forward kinematics bertujuan mencari solusi untuk mendapatkan
posisi dan orientasi dari end effector yang relatif terhadap base dengan memberikan
sudut-sudut dari joint (θi). Inverse kinematics bertujuan mencari solusi untuk
menemukan besarnya sudut-sudut joint (θi) dengan memberikan posisi dari end effector
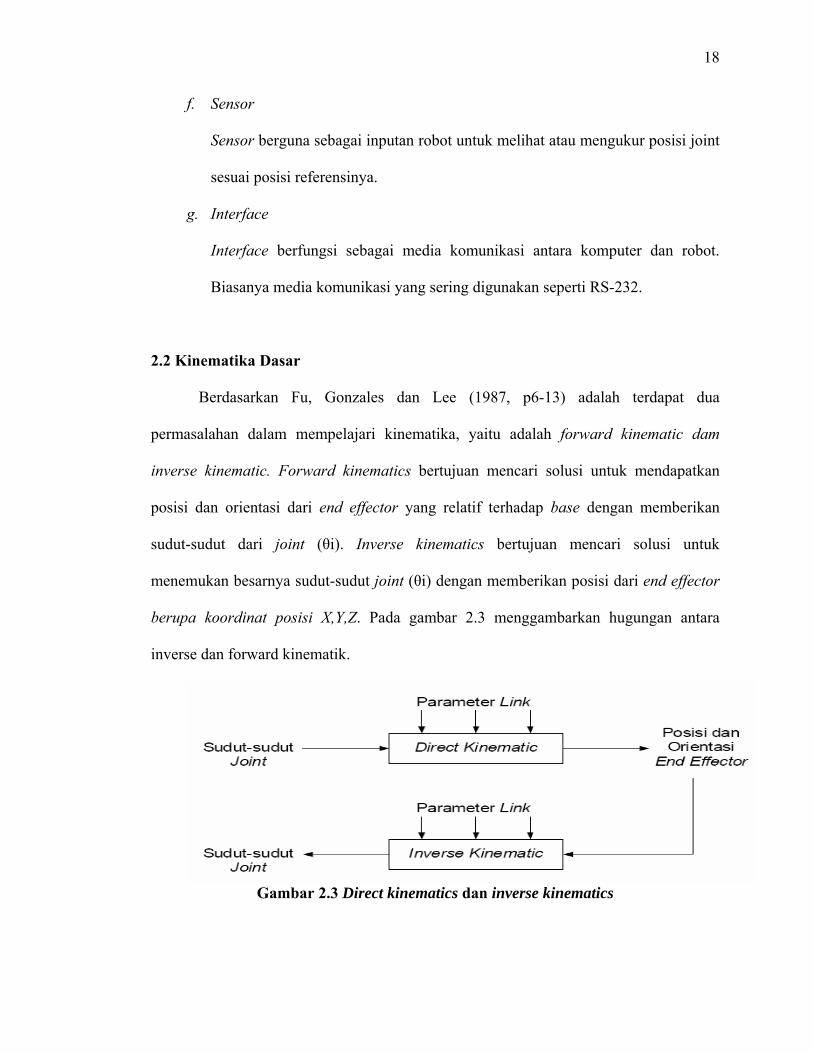
berupa koordinat posisi X,Y,Z. Pada gambar 2.3 menggambarkan hugungan antara
inverse dan forward kinematik.
Gambar 2.3 Direct kinematics dan inverse kinematics

19
2.2.1 Forward Kinematics
Bagian ini menjelaskan hubungan mencari solusi untuk mendapatkan posisi dan
orientasi dari tool frame dalam hal ini end effector yang relatif terhadap base frame
dengan memberikan sudut-sudut dari joint (θi). Maksud dari Posisi ini merupakan titik
kedudukan relatif suatu benda terhadap suatu titik acuan dan Orientasi merupakan arah
suatu benda relatif terhadap suatu titik acuan. Sedangkan Frame merupakan sekumpulan
vektor yang memberikan informasi tentang posisi dan orientasi.
Untuk mendapatkan posisi dan orientasi tersebut bisa menggunakan matrix
transformasi homogeneous, dan konsep Denavit-Hartenberg. Untuk memahami konsep
Denavit-Hartenberg memerlukan pembahasan tentang transformasi homogeneous di
mana untuk memahaminya hal tersebut memerlukan pembahasan tentang pergerakan
rotasi dan translasi dalam tiga dimensi. Gerak translasi merupakan gerak perpindahan
dari suatu titik ke titik lain secara lurus. Gerak rotasi merupakan gerak perpindahan
suatu titik ke titik lain secara melingkar. Sedangkan transformasi merupakan gabungan
dari gerak translasi dan gerak rotasi.
2.2.1.1 Pergerakan Rotasi Dalam 3 Dimensi
Berdasarkan Fu, Gonzales dan Lee (1987, p14-19) Pada Gambar 2.4
menggambarkan sistem koordinat OUVW berotasi terhadap sistem koordinat referensi
OXYZ. Titik P dapat direpresentasikan melalui tiap-tiap koordinatnya dengan mengacu
kepada sistem koordinat OUVW dan OXYZ.

20
Gambar 2.4 Koordinat OUVW relatif terhadap sistem koordinat OXYZ
Pada gambar 2.5 merupakan matriks rotasi dalam 3 dimensi berukuran 3 x 3.
Sistem koordinat OUVW tersebut berotasi terhadap sumbu OX dengan sudut sebesar α,
maka koordinat arah sumbu OX tidak berubah, yang berubah koordinat pada arah OY
dan OZ .
Pers.....(2-1)
Gambar 2.5 Koordinat OUVW berotasi terhadap sumbu OX
21
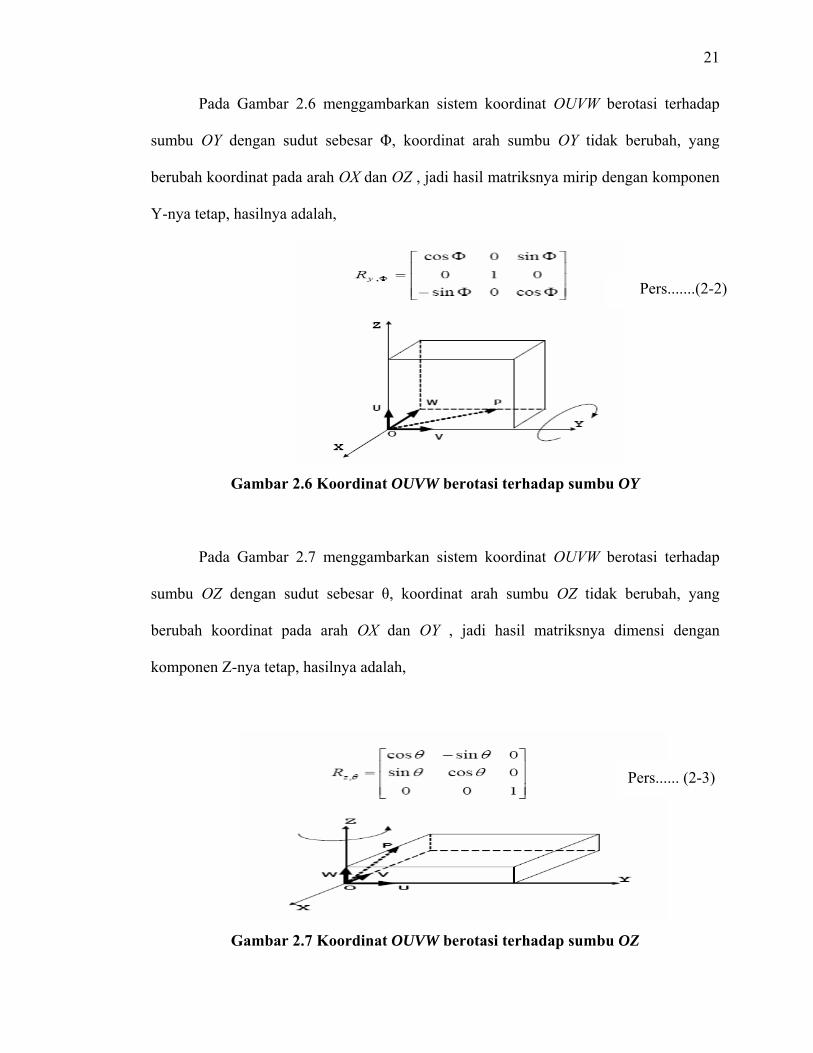
Pada Gambar 2.6 menggambarkan sistem koordinat OUVW berotasi terhadap
sumbu OY dengan sudut sebesar Φ, koordinat arah sumbu OY tidak berubah, yang
berubah koordinat pada arah OX dan OZ , jadi hasil matriksnya mirip dengan komponen
Y-nya tetap, hasilnya adalah,
Gambar 2.6 Koordinat OUVW berotasi terhadap sumbu OY
Pada Gambar 2.7 menggambarkan sistem koordinat OUVW berotasi terhadap
sumbu OZ dengan sudut sebesar θ, koordinat arah sumbu OZ tidak berubah, yang
berubah koordinat pada arah OX dan OY , jadi hasil matriksnya dimensi dengan
komponen Z-nya tetap, hasilnya adalah,
Gambar 2.7 Koordinat OUVW berotasi terhadap sumbu OZ
Pers.......(2-2)
Pers...... (2-3)
22
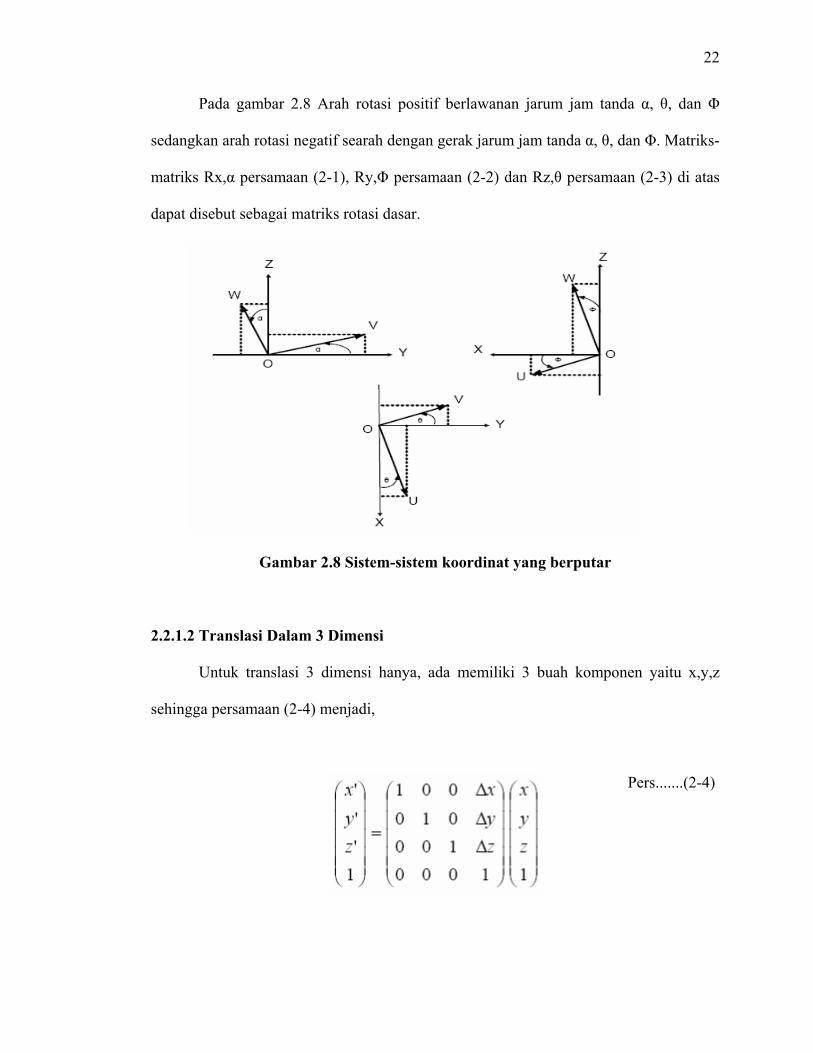
Pada gambar 2.8 Arah rotasi positif berlawanan jarum jam tanda α, θ, dan Φ
sedangkan arah rotasi negatif searah dengan gerak jarum jam tanda α, θ, dan Φ. Matriks-
matriks Rx,α persamaan (2-1), Ry,Φ persamaan (2-2) dan Rz,θ persamaan (2-3) di atas
dapat disebut sebagai matriks rotasi dasar.
Gambar 2.8 Sistem-sistem koordinat yang berputar
2.2.1.2 Translasi Dalam 3 Dimensi
Untuk translasi 3 dimensi hanya, ada memiliki 3 buah komponen yaitu x,y,z
sehingga persamaan (2-4) menjadi,
Pers.......(2-4)
23
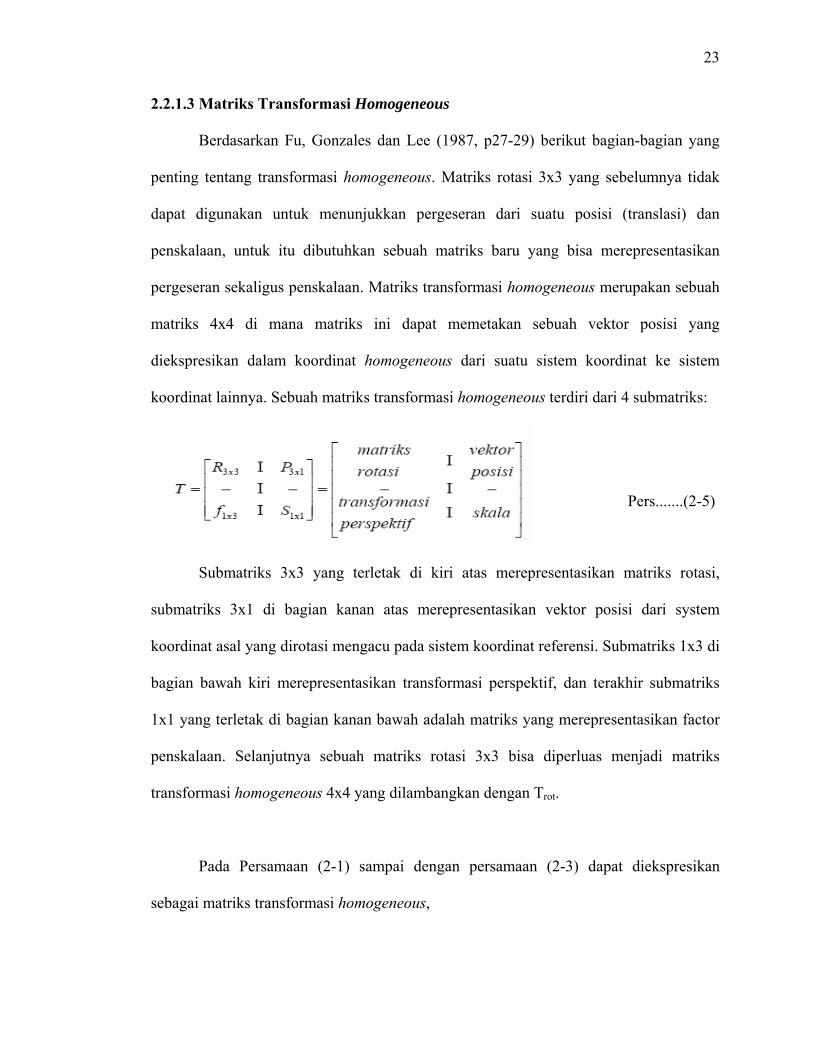
2.2.1.3 Matriks Transformasi Homogeneous
Berdasarkan Fu, Gonzales dan Lee (1987, p27-29) berikut bagian-bagian yang
penting tentang transformasi homogeneous. Matriks rotasi 3x3 yang sebelumnya tidak
dapat digunakan untuk menunjukkan pergeseran dari suatu posisi (translasi) dan
penskalaan, untuk itu dibutuhkan sebuah matriks baru yang bisa merepresentasikan
pergeseran sekaligus penskalaan. Matriks transformasi homogeneous merupakan sebuah
matriks 4x4 di mana matriks ini dapat memetakan sebuah vektor posisi yang
diekspresikan dalam koordinat homogeneous dari suatu sistem koordinat ke sistem
koordinat lainnya. Sebuah matriks transformasi homogeneous terdiri dari 4 submatriks:
Submatriks 3x3 yang terletak di kiri atas merepresentasikan matriks rotasi,
submatriks 3x1 di bagian kanan atas merepresentasikan vektor posisi dari system
koordinat asal yang dirotasi mengacu pada sistem koordinat referensi. Submatriks 1x3 di
bagian bawah kiri merepresentasikan transformasi perspektif, dan terakhir submatriks
1x1 yang terletak di bagian kanan bawah adalah matriks yang merepresentasikan factor
penskalaan. Selanjutnya sebuah matriks rotasi 3x3 bisa diperluas menjadi matriks
transformasi homogeneous 4x4 yang dilambangkan dengan Trot.
Pada Persamaan (2-1) sampai dengan persamaan (2-3) dapat diekspresikan
sebagai matriks transformasi homogeneous,
Pers.......(2-5)

24
Matriks-matriks rotasi 4x4 di atas disebut juga matriks rotasi homogeneous
dasar. Pada matriks rotasi homogeneous faktor penskalaan di set 1, karena diasumsikan
tidak terjadi pembesaran pada objek jika tidak menggunakan kamera.
2.2.1.4 Konsep Denavit Hartenberg
Manipulator mekanik terdiri dari sejumlah bagian tubuh yang dinamakan link
dan joint. joint digunakan untuk menghubungkan setiap link-link yang ada. Setiap joint
mewakili satu derajat kebebasan. Untuk mendeskripsikan hubungan translasional dan
rotasional antara link-link yang berdekatan digunakanlah konsep Denavit dan Hartenberg
sebagai sebuah metode matriks yang secara sistematis membangun sebuah sistem
koordinat dari masing-masing link. Berdasarkan Andreas Bischo et al(1999.p20-21)
Dalam mencari sebuah transformasi dari sebuah ujung alat hingga basis dari sebuah
manipulator, ditentukan frame dari link-link dan mendapatkan teknik yang sistematikal,
yang dapat menjabarkan kinematika dari sebuah robot dengan n derajat kebebasan dalam
cara yang unik.
Pers (2-6)
Pers (2-7)
Pers (2-8)

25
Gambar 2.9 menunjukkan link pertama dari rantai kinematika.
Pada basis dan tiap link i dari rantai tersebut menggambarkan sebuah frame Ki
yang pesifik, yang mana merupakan link. Jadi posisi dan orientasi dari sebuah frame
link berubah dengan berdasarkan frame link yang sebelahnya menurut pergerakkan dari
penggabungan joint. Maka dari itu koordinat frame Ki dapat dijabarkan dari frame Ki-1
link sebelumnya. Transformasi homogeneous meliputi sudut joint (untuk joint putar)
atau offset joint (untuk prismatic joint). Pada akhirnya frame Kn dapat ditransformasikan
ke frame base dengan mengalikan semua transformasi link dengan rantai kinematik dari
matrik trasnfomasi homogeneus. Untuk membuat suatu posisi/orientasi tergantung dari
frame alat yang mendekati frame basis dari manipulator (biasanya berada di lantai
bersifat permanen), urutan dari transformasi homogeneous diurut dari atas(ujung akhir)
hingga bawah(basis) dengan urutan Kn-1,Kn-2,….,K0. Tugas yang tersisa adalah
mengatur semua matriks transformasi homogeneous untuk sebuah tipe rantai kinematik,
mengingat sudut dari link dan tipe dari joint.

26
Gambar 2.10 Parameter kinematik menurut konsep Denavit Hartenberg
Berdasarkan Andreas Bischo et al(1999.p22-23) Pada Gambar 2.10
menunjukkan rantai kinematik, dimana dua buah link yang terhubung lewat sebuah joint
putar. Ini digunakan untuk menunjukkan bagaimana parameter-parameter didapat
dengan penjabaran link. i dan i-1 adalah joint yang merepresentasikan joint yang satu
dengan yang sebelumnya. Pada joint yang ke i, perpotongan garis tegak pada titik Ui
dengan garis lurus ai merupakan frame Ki , dimana i = 0, 1, 2, 3, 4,…, n (dimana n
merupakan jumlah derajat kebebasan). Sumbu x didapat dari garis normal pada frame
base dan searah dengan link jika bukan base. Sumbu Z merupakan garis lurus yang
searah dengan sumbu putar joint, sehingga berdasarkan kaedah tangan kanan sumbu y
bisa didapatkan. Kaedah tangan kanan didefinisikan sebagai perluasan ibu jari, jari

27
telunjuk, dan jari tengah tangan kanan. pergerakan dari x (jari telunjuk) ke +y (jari
tengah) menunjukkan hasil vektor z (ibu jari).
Sebuah transformasi homogeneous i-1Ai pencerminkan frame Ki terhadap Ki-
1melalui link terbaru, dapat diturunkan dengan transformasi geometrikal melalui link
dengan pertimbangan sebagai berikut:
1. Rotasi terhadap Zi-1 dengan sudut θ.
2. Translasi sepanjang Zi-1 dengan perpindahan di.
3. Translasi sepanjang Xi-1 dengan perpindahan ai.
4. Rotasi terhadap Xi dengan sudut αi.
Berdasarkan Fu, Gonzales dan Lee (1987, p36) setiap koordinat dibuat
berdasarkan tiga buah aturan di bawah ini:
1. Sumbu Zi-1 berada di sepanjang poros pergerakan dari joint ke-i
2. Sumbu Xi tegak lurus terhadap sumbu Zi-1 dan menunjuk menjauh darinya
3. Sumbu Yi melengkapi sistem koordinat yang diperlukan berdasarkan aturan
tangan kanan
Berikutnya juga perlu diperhatikan adalah konvensi Denavit-Hartenberg, dikutip
dari Fu, K. S. et al., page 37:
• θi adalah sudut pandang pada joint dari sumbu xi − 1 dengan sumbu zi – 1
sebagai porosnya (perputarannya menggunakan aturan tangan kanan).

28
• di adalah jarak dari pusat koordinat kerangka/sumbu koordinat ke-(i – 1) ke
perpotongan sumbu zi – 1 dengan sumbu zi – 1 dengan sumbu xi sepanjang
sumbu zi – 1.
• ai adalah jarak/panjang perpotongan sumbu zi – 1 dengan sumbu xi ke pusat
kerangka/sumbu koordinat ke-i sepanjang sumbu xi (atau jarak terpendek
antara sumbu zi – 1dan sumbu zi).
• αi (alpha) adalah sumbu dari sumbu zi –1 ke sumbu zi dengan poros sumbu
xi (perputarannya dengan menggunakan aturan tangan kanan).
Masing-masing dari keempat pertimbangan di atas dapat dilakukan perhitungan
dengan cara matriks homogeneous rotasi-translasi dan hasil dari keempat matriks
tersebut adalah matriks transformasi berdasarkan konsep Denavit Hartenberg untuk
sistem koordinat berdekatan i-1Ai, yaitu sistem koordinat i dan sistem koordinat i-1,
untuk joint putar adalah:
i-1Ai = TZ,d . TZ,θ . TX,a . TX,α
Pers (2-10)

29
2.2.2 Inverse Kinematics
Inverse Kinematics merupakan pengendalian posisi dan orientasi dari end effector
robot untuk mencapai suatu objek di dalam sistem koordinat. Berdasarkan posisi dan
orientasi yang ingin dicapai, inverse kinematics digunakan untuk mencari besarnya sudut
(θi) yang harus diberikan pada setiap joint (i) manipulator untuk mendapatkan posisi dan
orientasi tersebut (Fu, Gonzales dan Lee, 1987, p52).
Berdasarkan Craig (1989, p114-118), kemungkinan adanya solusi perlu diketahui
dahulu sebelum melakukan pencarian nilai θi. Kemungkinan untuk mendapatkan solusi
sangat penting untuk diketahui, hingga perhitungan untuk mencari solusi tidak perlu
dilakukan apabila tidak ada jaminan bisa mendapatkan solusi. Ada tidaknya solusi
berhubungan erat dengan area jangkauan (workspace) robot. Area jangkauan adalah
volum ruang yang dapat dicapai oleh end effector manipulator. Apabila posisi dan
orientasi (titik tujuan) dari end effector berada di dalam area jangkauan, maka
sekurangkurangnya terdapat satu solusi. Apabila solusinya ada, maka kemungkinan lain
yang bisa terjadi adalah solusinya lebih dari satu (multi solusi). Hal ini menjadi masalah
karena sistem dituntut hanya bisa memilih satu solusi saja.
Gambar 2.11 Dua solusi untuk satu posisi

30
Sebagai contoh bisa dilihat pada gambar 2.11, berdasarkan gambar tersebut, end
effector semula berada pada posisi A dan diinginkan pindah ke posisi B. Untuk
mencapai posisi B ada dua macam konfigurasi gerakan manipulator yang bisa dilakukan
(ditunjukkan dengan garis putus-putus 1 dan 2). Kedua solusi tersebut sama-sama bisa
mendapatkan posisi yang sama. Bila terdapat lebih dari satu solusi, maka akan sangat
baik untuk memilih solusi dengan gerakan paling sedikit pada joint-joint, berdasarkan
contoh gambar 2.11 di atas maka garis putus-putus paling atas (1) merupakan pilihan
terbaik. Namun apabila ada halangan atau rintangan ketika memilih solusi dengan
gerakan yang paling minimal, maka solusi dengan pergerakan yang lebih jauh bisa
dipilih. Hal ini menunjukkan perlunya menghitung semua solusi yang mungkin
dilakukan. Banyaknya solusi ditentukan oleh jumlah joint yang dimiliki manipulator,
dan juga fungsi dari Parameter-parameter (di,ai,αi dan θi pada manpulator dengan joint
putar; dan di, ai, dan αi pada manipulator dengan joint prismatik). Parameter-parameter
link (di, ai, dan αi pada manipulator dengan join putar; dan θi, ai, dan αi pada
manipulator dengan joint prismatik) yang tidak sama dengan nol. Semakin banyak
parameter link yang tidak bernilai nol, maka semakin banyak pula cara atau solusi untuk
mencapai suatu tujuan. Penyelesaian Inverse kinematic bisa dengan cara pendekatan
numerik.
Pendekatan Numerik
Pada pendekatan numerik ini memanfaatkan kemampuan komputer untuk
melakukan perhitungan secara berulang-ulang untuk mendapatkan solusi inverse
kinematics. Komputer akan terus menghitung semua kemungkinan solusi secara
berulang-ulang sampai didapatkan suatu solusi yang sesuai untuk sudut-sudut joint yang
dibutuhkan agar bisa mencapai posisi dan orientasi yang diinginkan. Cara numerik

31
relatif lebih mudah, namun menghabiskan lebih banyak waktu karena sifat
pengulangannya. Apabila cara numerik menghabiskan waktu terlalu banyak, maka perlu
dipertimbangkan penggunaan cara analitik (Craig, 1989, p119-120).
2.3 Mikrocontroller
Focus pada keluarga 8051. Arsitektur jenis 8051 dikembangkan oleh Perusahaan
INTEL pada tahun 1980 yang digunakan untuk keperluan embedded system(sistem yang
berbasis penanaman bahasa mesin). AT89S51 mempunyai konsumsi daya rendah,
mikrokontroller 8-bit CMOS dengan 4K byte momori Flash ISP ( in system
programmable/ dapat diprogram didalam sistem).Divais ini dibuat dengan teknologi
memori nonvolatile kerapatan tinggi dan kompatibel dengan standart industri 8051, set
instruksi dan pin keluaran. Flash yang berada didalam chip memungkinkan memori
program untuk diprogram ulang pada saat chip didalam sistem atau dengan
menggunakan Programmer memori nonvolatile konvensional. Dengan
mengkombinasikan CPU 8 bit yang serbaguna dengan flash ISP pada chip, ATMEL
89S51 merupakan mikrokontroller yang luarbiasa yang memberikan fleksibelitas yang
tinggi dan penyelesaian biaya yang efektif untuk beberapa aplikasi kontrol.
AT89S51 memberikan fitur-fitur standar sebagai berikut: 4K byte Flash, 128
byte RAM, 32 jalur I/O, Timer Wachtdog, dua data pointer, dua 16 bit timer/ counter,
lima vektor interupsi dua level, sebuah port serial full dupleks, oscilator internal, dan
rangkaian clock. Selain itu AT89S51 didisain dengan logika statis untuk operasi dengan
frekuensi sampai 0 Hz dan didukung dengan mode penghematan daya. Pada mode idle
akan menghentikan CPU sementara RAM, timer/ counter, serial port dan sistem

32
interupsi tetap berfungsi. Mode Power Down akan tetap menyimpan isi dari RAM tetapi
akan membekukan osilator, menggagalkan semua fungsi chip sampai interupsi eksternal
atau reset hardware ditemui.
(http://www.mytutorialcafe.com/mikrokontroller%20dasar.htm)
Bentuk chip mikrokontroler AT89S51 dapat dilihat dari gambar dibawah ini
Gambar 2.12 Konfigurasi PIN 89S51
2.3.1 Mengenai I/O pada Mikrocontroller.
Input output yang dilakukan pada percobaan ini sangat sederhana dimana
mengambil input dari dip switch atau push button dan mengeluarkan output ke
led atau seven segment. Sebelum nya inisialisasi port yang digunakan untuk
input dan output pada praktikum adalah ada 4 buah port yaitu:
Port 0

33
Merupakan port yang memiliki dua kegunaan. Pada desain yang minimum
sederhana digunakan sebagai port I/O
Port 1
Merupakan port yang hanya berfungsi sebagai port I/O, kecuali pada IC 89S52
yang menggunakan P1.0 dan P1.1 sebagai input eksternal untuk timer ketiga T3.
Port 1 terdapat pada pin 1-8.
Port 2
Merupakan dual-purpose port. Pada desain minimum digunakan sebagai port I/O.
Port 2 terdapat pada pin 21-28.
Port 3
Merupakan dual-purpose port. Selain sebagai port I/O juga mempunyai fungsi
Khusus.
2.3.2 Addressing Mode
Addressing Mode merupakan cara pengalamatan memory baik yang terdapat pada
RAM maupun ROM, Addressing mode pada arsitektur mikrokontroler keluarga 8051
yaitu:
· Immediate Addressing
Dinamakan immediate addressing karena nilai yang berada pada pada memori
langsung diubah oleh instruksi. Contoh dari perintah ini adalah sebagai berikut:
MOV A,#23h
Pada perintah di atas nilai pada akumulator akan diisi dengan nilai 23 hexadecimal.
· Direct Addressing

34
Pada mode direct addressing, nilai pada suatu alamat memori akan diisi secara
langsung oleh nilai yang terdapat pada alamat memori yang lain, misalnya 31h. Contoh
dari perintah ini adalah sebagai berikut:
MOV A,31h
Pada perintah di atas, nilai pada akumulator akan diisi dengan nilai yang terdapat pada
memori alamat 31h pada RAM, misalkan alamat memori 31h berisi nilai FBh, maka A
akan bernilai FBh setelah instruksi tersebut dieksekusi.
· Indirect Addressing
Pada mode ini nilai dari suatu memori akan diisi dengan nilai dari alamat memori
yang ditunjuk oleh suatu alamat memory yang lain atau register yang lain. Contoh dari
mode ini adalah sebagai berikut:
MOV A,@R0
Pada perintah ini akumulator akan diisi dengan nilai yang terdapat pada alamat yang
ditunjuk oleh nilai R0. Jika R0 bernilai 10h dan pada alamat 10h terdapat nilai FCh,
maka akumulator akan diisi dengan nilai yang berada pada alamat 10h yaitu FCh.
2.4 Komunikasi Serial
Komunikasi serial merupakan komunikasi data dengan pengiriman data secara
satu per satu dengan menggunakan satu jalur kabel data. Sehingga komunikasi serial
hanya menggunakan 2 kabel data yaitu kabel data untuk pengiriman yang disebut
transmit (Tx) dan kabel data untuk penerimaan yang disebut receive (Rx). Kelebihan
dari komunikasi serial adalah jarak pengiriman dan penerimaan dapat dilakukan dalam

35
jarak yang cukup jauh dibandingan dengan komunikasi parallel tetapi kekurangannya
adalah kecepatan lebih lambat daripada komunikasi parallel, untuk saat ini sedang
dikembangkan teknologi serial baru yang dinamakan USB (Universal Serial Bus) yang
memiliki kecepatan pengiriman dan penerimaan data lebih cepat disbanding serial biasa.
Gambar 2.13 Connector Female
Beberapa contoh : komunikasi Serial RS-232 dan RS-485.
Komunikasi serial RS-232 antara Mikrokontroller dengan Komputer PC dapat
melalui Serial Port tetapi butuh sebuah Interface sebagai pengantar berkomunikasinya.
MAX232 digunakan sebagai Sinkronisasi data dari Mikrokontroller ke Komputer PC
karena Logika yang terdapat pada Komputer PC adalah :
• Logika 1 pada Komputer PC adalah tegangan antara -3 sampai -25 Volt
• Logika 0 pada Komputer PC adalah tegangan antara 3 sampai 25 Volt
Sumber : http://www.arcelect.com/rs232.htm
2.5 Servo Motor DC
Motor servo merupakan sebuah motor dc kecil yang diberi sistim gear dan
potensio meter sehingga dia dapat menempatkan “horn” servo pada posisi yang

36
dikehendaki. Motor servo ini jelas menggunakan sistim close loop sehingga posisi
“horn” yang dikehendaki bisa dipertahanakan.
2.5.1 Jenis Motor Servo
Secara umum terdapat 2 jenis motor servo. Yaitu motor servo standard dan motor
servo Continous. Motor servo standard sering dipakai pada sistim robotika misalnya
untuk membuat “ Robot Arm” ( Robot Lengan ) sedangkan motor servo Continous
sering dipakai untuk Mobile Robot.
2.5.2 Mengontrol Motor Servo
Penggunaan motor servo untuk bidang robotika tentu ada alasannya. Pertama
adalah motor servo memiliki putaran yang lambat dan torsi yang kuat ( berkat adanya
sistim gear ). Hal ini cocok dengan bidang robotika, bandingkan misalnya dengan motor
dc biasa yang memiliki putaran cepat namun torsi rendah.
Kedua, sistim kontrol untuk motor servo relatif sedikit ( diperlukan hanya 1 jalur
data saja ). Hal ini tentu berbeda misalnya jika menggunakan motor stepper yang
memerlukan jalur kontrol lebih dari 1 jalur. Oleh karena itu tantangannya adalah
bagaimana mengontrol motor servo yang hanya menggunakan 1 jalur tersebut. Oleh
karena hanya digunakan 1 jalur data untuk mengontrol motor servo, maka digunakan
teknik PWM ( Pulse Width Modulation = Modulasi Lebar Pulsa ) . berdasarkan
(microrobotics.blogspot.com)

37
Gambar 2.14 Hubungan lebar pulsa dengan posisi “horn” servo
DC servo motor memiliki beberapa keunggulan, yaitu :
• Bentuknya kompak, ringan dan berdaya kerja tinggi
• Dapat bekerja pada daerah atau tempat yang kurang baik
• Kecepatan maksimum yang sangat tinggi
• Biaya perawatan mudah
• tenaga putaran tinggi
• tersedia Dalam semua ukuran ( bentuk servo sesuai ukuran)
38
Sebagian dari kerugian-kerugian dari servo sebagai berikut:
• lebih Mahal dibanding stepper motor
• Tidak bisa bekerja dengan sistem open looppengulangan
• Merlukan penyetelan parameter pengulangan
• Perlu perawatan untuk brushednya.
2.6 Teaching Box
Teaching Box digunakan pada sebagai alat pengendali dari lengan Robot
tersebut. Teaching Box selain untuk menggerakan lengan Robot secara manual,
digunakan untuk menyimpan posisi sementara. Setelah itu, baru di-Load ke Komputer,
dan disimpan dengan ekstensi. Berikut merupakan contoh teaching box yang digunakan
pada robot RV-M1
Gambar 2.15 Teaching Box
Recommended

















