Capítulo 2. Sistemas Aéreos Autónomos
Pág. 11
2.1 Introducción
Es innegable que la aeronáutica actual está viviendo una transición, lenta pero inexorable,
hacia aeronaves más automatizadas. El empleo de sistemas cada vez más autónomos, más
capaces de procesar la información para minimizar ha sido constante en los últimos años. Así
por ejemplo el paso de la versión 300 a la 400 del Boeing 747 redujo la tripulación de tres a dos
personas gracias al empleo de displays capaces de filtrar la información relevante
disminuyendo la carga de trabajo de la tripulación (Boeing Inc. 2009). En los últimos años el
desarrollo de la tecnología ha permitido llevar este automatismo un paso más allá, hasta el
punto de plantearse si realmente es necesaria la existencia del piloto.
En este capítulo se intentará proporcionar de forma somera una visión general y
autocontenida del estado de la técnica de los Vehículos Aéreos Autónomos de forma que, sin
necesidad de conocimientos previos, se pueda obtener una perspectiva de esta tecnología. El
autor ha intentado aportar información cuantitativa, referenciada y actualizada en la medida
de lo posible con el fin de presentar un fiel y objetivo retrato del presente y el futuro
inmediato de esta área.
2.2 Descripción
De forma genérica podemos decir que un sistema Aéreo Autónomo está compuesto por una
estación tierra (GS), un sistema de comunicaciones y un elemento aéreo1 (Fig. 2-1). El
funcionamiento del sistema se basa en que un operador en la estación tierra dirige a través de
un Data link la operación de la aeronave basándose en la información que ésta le transmite a
través de sus sensores.
En función de las características de actuaciones de la aeronave (techo en servicio, velocidad,
alcance), la carga de pago de la misma, la cobertura y capacidad de transmisión del enlace de
datos y de la autonomía (en el sentido de capacidad de toma de decisiones) del UAV la
operación del sistema variará.
1 Aunque en la bibliografía puede encontrarse fuentes que engloban la estación base con el
sistema comunicaciones, el autor considera interesante diferenciarlos, ya que pueden estar
físicamente separados e incluso incluir redes de radiofrecuencia aéreas de VHF/UHF o
comunicaciones satélite completamente independientes de la estación tierra y que
constituyen una infraestructura significativa.
Capítulo 2. Sistemas Aéreos Autónomos

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 12
Fig. 2-1. Elementos que componen un sistema Aéreo Autónomo y su interacción con otros agentes
2.3 Nomenclatura
Antes de profundizar en este campo, es necesario clarificar algunos conceptos. En primer lugar
definamos qué es exactamente un UAV. Según el diccionario del Departamento de Estado
estadounidense, un UAV o UA es (Office Of the Secretary of Defence 2004):
A powered, aerial vehicle that does not carry a human operator uses aerodynamic forces to provide vehicle lift, can fly autonomously or be piloted remotely, can be expendable or
recoverable, and can carry a lethal or non-lethal payload. Ballistic or semi ballistic vehicles,
cruise missiles, and artillery projectiles are not considered unmanned aerial vehicles
Que traducido
Un vehículo aéreo propulsado que no lleva bordo ningún operador humano, se sustenta
mediante fuerzas aerodinámicas, puede volar autónomamente o pilotado a distancia, puede
ser o no recuperable y puede portar carga de pago letal o no letal. Vehículos balísticos o
semibalísticos, misiles de crucero y proyectiles de artillería no son considerados vehículos
aéreos no tripulados.
Esta definición conduce a dos razonamientos:
- Es muy general, quizás demasiado, pero para cubrir con una definición el heterogéneo
y vasto mundo de estos aparatos hay que laxo en cuanto requisitos de inclusión.
- Posee un sesgo claramente militarizado, pero no olvidemos que como en toda la
aeronáutica en general la influencia de la tecnología militar es máxima.

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 13
Partiendo de esta definición general, se emplean términos como UAV (Unmanned Aerial
Vehicle, Vehículo Aéreo no tripulado), UAS (Unmanned Aerial System, Sistema Aéreo no
tripulado) o RPV (Remotely Piloted Vehicle, Vehículo pilotado a distancia) indistintamente,
dando lugar a malentendidos y confusiones. Sin embargo estos acrónimos representan
ingenios claramente distintos.
La diferencia entre UAV y UAS es simplemente la tendencia actual a indicar que la robótica
aérea es algo más que un avión, no es simplemente la estructura, sino que es una sinergia
compleja en la que el papel de la aviónica y los algoritmos de control, sense and avoid y
percepción juegan un papel determinante, dando lugar a un sistema complejo. Otros autores
establecen la diferenciación entre los dos términos como que el UAV es el segmento aéreo del
sistema UAS que incluye estación tierra e infraestructura de comunicaciones (Excellence, US
Army UAS Center of 2009).
El término RPV hace referencia a aeronaves que vuelan sin piloto a bordo pero que son
pilotadas distancia en el sentido de que existe un piloto en algún punto que a través de un
enlace de radio recibe imágenes e información del estado de la aeronave y lo pilota como si
estuviese embarcado. Este concepto es diferente al del aparato autónomo al que un operador
(en contraposición al piloto) se le indica un destino o una trayectoria y es capaz de seguirla.
Aunque a simple vista la diferencia parezca sutil, en realidad es un salto espectacular. En el
primer caso el avión es muy similar a un avión de radio control. Es simplemente un aparato
que recibe órdenes de muy bajo nivel (en realidad señales de los actuadores correspondientes)
mientras que en el segundo existe un sistema de gestión de vuelo (FMS, Flight Management
System) que es capaz de decidir por sí mismo cómo pilotar la aeronave para evitar colisiones,
mantener rumbos frente a ráfagas de viento… Actualmente, el principal reto en el campo de la
aviación no tripulada es que los UAV tengan la autonomía (autonomous, no endurance) y la
seguridad (safety) equivalente a la de un avión tripulado. Evidentemente el paso intermedio
son los RPV, que exigen, al menos, la capacidad de un enlace de radio de gran ancho de banda
y libre de interferencias.
Con estas consideraciones puede entenderse por qué se esté empezando a imponer la
designación de vehículo aéreo autónomo en lugar de no tripulado, reflejando así mucho mejor
la realidad de lo que se pretende definir. A este respecto cabe hacer una aclaración, pertinente
en la sección de nomenclatura, y es la de la ambigüedad o polisemia del término autonomía,
que hace referencia tanto al tiempo que una aeronave puede permanecer en vuelo
(endurance) como a la capacidad de un robot de tomar decisiones (autonomous), Aunque
puede distinguirse fácilmente de qué se trata por el contexto
2.4 El UAV frente a la aeronave tripulada
Las ventajas de los UAVs respecto a los aviones pilotados son manifiestas
- Ahorro de peso. No es sólo el peso del piloto, sino el de todos los sistemas asociados,
como displays, cabina, sistemas de hábitat, asientos eyectables en el caso de cazas…
Para un avión de combate, la reducción de peso puede llegar a suponer una fracción

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 14
considerable del MTOW (Maximum Take-off Weight, peso, máximo al despegue,). Esta
disminución de la masa de la aeronave reduce mucho el consumo de combustible y
permite crear sistemas más eficientes.
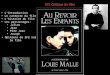
- Gran libertad de diseño. Debido a la ausencia de piloto, las cortapisas asociadas a la
presencia del mismo desaparecen. Así, es posible diseñar UAV de cualquier tamaño,
desde tan grandes como el Global Hawk (Envergadura 35,41 m.; MTOW 14.628 kg.)
hasta otros tan pequeños como el Black Widow (Envergadura 15,24 cm.; MTOW 50
gr.).
Fig. 2-2.a Black Widow
Fig. 2-2.b Global Hawk frente B-737 y U2
Fig. 2-2. Heterogeneidad de dimensiones de los UAS.
- Misiones Dull, Dirty and Dangerous (Departament of Defence 2007) (Aburridas, sucias
y peligrosas). Es una de las grandes ventajas de los UAVs militares. Es posible realizar
tareas de observación o incuso de ataque durante largos periodos de tiempo en
entorno hostiles sin poner en peligro vidas humanas, reduciendo tanto el coste social
de un conflicto como la pérdida económica que supone la muerte de un piloto
entrenado durante años.
o Dull: Como ejemplo de misiones aburridas, cabe destacar el caso de los
bombarderos B-2, que durante la operación Libertad Duradera realizaron
misiones de 44 horas. Teniendo en cuenta que la tripulación consta de dos
pilotos alojados en el pequeño habitáculo de la cabina, cabe imaginarse el
desgaste que este tipo de misiones produce.
o Dirty: Estados Unidos empleo aviones B-17s y F6Fs entre 1946 y 1948 para
tomar muestras en vivo del interior de nubes nucleares tras la explosión de
bombas atómicas. En 1948 la USAF decidió que el riesgo para las tripulaciones
era aceptable y sustituyó los aviones sin piloto por F-84 tripulados en los que
la tripulación se protegía con trajes de plomo. Varios pilotos murieron por la
radiación o por la incapacidad de salir del avión tras el accidente por el
sobrepeso (Departament of Defence 2007)
o Dangerous: es bien conocido el incidente durante la Guerra Fría en el que un
avión de reconocimiento U-2 Estadounidense tripulado por Gary Powers fue
derribado en espacio aéreo soviético el 1 de mayo de 1960, desencadenando
una crisis internacional. El piloto fue acusado de espionaje y condenado a
prisión y trabajos forzados. Este incidente llevaría a los EE.UU. a desarrollar
Firefly, un avión de reconocimiento sin piloto lanzado desde las alas de un C-

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 15
130 Hércules y recuperado en áreas propias bien por paracaídas o por un
helicóptero en vuelo (Sánchez 2003).
- Reducidos costes. Además del importante ahorro del coste de la tripulación, muchos
UAVs, por sus pequeñas dimensiones, pueden operar sin necesidad de infraestructura
aeroportuarias (lanzados con la mano o mediante catapulta), y sin embargo llevar a
cabo valiosas misiones. Esto supone una gran flexibilidad de facto, una
“democratización” del empleo de medios aéreos, ya que muchas instituciones, desde
Universidades a empresas, no podrían permitirse el costo de estos servicios con
aeronaves tradicionales.
Pero la reducción de costes no sólo afecta a la difusión de la aeronáutica entre las
instituciones con menor capacidad económica. Aun en organizaciones con grandes
medios materiales el ahorro es siempre importante. Así por ejemplo, la USAF ha
podido constatar que el costo operacional de los UAS es muy inferior al de las
aeronaves tripuladas. Por otra parte, si bien es cierto que el costo de sistemas
equivalentes en los UAS es ligeramente superior por la reducción de precio, el coste de
adquisición suele ser bastante inferior. Como ejemplo sirva el hecho de que por el
precio de un obsoleto F-14 Tomcat se puede equipar un escuadrón completo de
Predator (Kumar 1997). Si bien es cierto que las capacidades de uno y otro no son
comparables, no deja de ser un dato cualitativo a tener en cuenta. La diferencia de
precio se acentúa aún más si se actualizan los datos con aeronaves más modernas
como el Eurofighter, el F-22 o el F-35.
Estudios más recientes muestran que, para tareas y prestaciones similares, el costo de
adquisición es elevado para aviones tripulados, el de operación es mayor para los UAS
por razones logísticas y por requerir de personal más especializado (Haddal 2010). En
estos mismos informes se concluye que las mejoras tecnológicas, como la
minimización del operador humano, terminaran de inclinar la balanza a favor de los
UAVs.
- Expansión de envolvente de vuelo: actualmente los aviones se diseñan para operar
dentro de los límites de la fisiología humana. En el caso de aviones de combate, esto
supone una gran limitación, ya que los misiles resultan mucho más ágiles y veloces por
carecer de esta cortapisa pudiendo alcanzar sus blancos. Al prescindir de piloto se
elimina también esa desventaja, obteniéndose aeronaves más capaces y seguras.
Todo ello justifica el gran incremento de UAVs de los últimos años (Fig. 2-3), tanto en aparatos
como en número de investigadores y fabricantes

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 16
Fig. 2-3. Evolución del mercado de UAS en los últimos años
2.5 Breve historia de la aviación no tripulada
El primer vuelo exitoso de una aeronave sin piloto se produjo en 1917, cuando Peter Cooper y
Elmer Sperry, que consiguieron controlar mediante radio un Curtiss N-9 modificado de la
marina americana volando niveladamente durante 50 millas.
El siguiente gran hito fue la adaptación de varios B-24 y B-17 en RPV, al menos durante la fase
de aproximación, guiados por sistema de televisión. El sistema, conocido como BQ-7 fue
desarrollado en 1944 por la Navy´s Special Air Unit y se destino a bombardear instalaciones de
misiles V-2 en Francia. Los resultados no fueron demasiado satisfactorios y el programa se
ralentizó hasta que en 1960 la USAF comenzó el programa AQM-34 Ryan FireBee o Lightning
Bug en diferentes versiones que, por primera vez, fueron diseñados desde el principio como
aviones sin piloto para ser lanzadas desde una aeronave. Este programa fue un éxito
realizando entre 1964 y 1975 34.000 misiones de observación con unos mil aparatos.

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 17
Fig. 2-4. Imagen de un Firebee
El éxito del programa AQM-34 llevó a Israel a adquirir 12 Firebee en los años 70 siendo
empleados para reconocimiento y señuelo en la Guerra del Yom Kippur. A partir de ese
momento las empresas israelíes IAI, Israel Air Industries, y Tadiran comenzaron a fabricar sus
propios UAVs, iniciando así un largo periodo de desarrollo de diversos vehículos aéreos no
tripulados que situarían a Israel a la cabeza mundial en la producción de dichos ingenios
(Sánchez 2003). Así los Mastiff, Sansón y Dalila fueron empleados con gran éxito en
coordinación con aviones tripulados en 1982 en la operación Libertad para Galilea en la
eliminación de defensas antiaéreas, bien haciendo de plataformas de reconocimiento o como
elementos de interferencia.
Fig. 2-5. Fotografía de un Tadiran Mastiff
El éxito de los UAVs Israelíes en varias operaciones reavivó el interés estadounidense en el
tema y los empleó en la Guerra del Golfo. Así, durante la operación Tormenta del desierto el

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 18
Pioner fue ampliamente utilizado para proporcionar imágenes en tiempo real. Durante todo el
conflicto hubo al menos uno de estos aparatos en vuelo y sólo uno de ellos calló a causa del
fuego enemigo en 522 salidas y 1641 horas de vuelo (Breen 1996)
Otros países como Francia, Sudáfrica, Reino Unido e incluso Pakistán también mostraron su
interés en esta Tecnología.
A partir de la Guerra del Golfo Estados Unidos decidió invertir en UAVs mayores y con más
autonomía, no sólo en señuelos y microUAVs, desarrollando General Dynamics en Gnat 750 en
1994, germen del actual Predator, que junto con los Hunter actuaron reconociendo y
designando blancos en la Guerra de los Balcanes.
El ataque del 11S con la consiguiente operación en Afganistán Libertad Duradera y la Invasión
de Irak han supuesto el despegue definitivo de los UAVs en el mundo militar. Dos muestras
contundentes de esto son la entrada en producción del Global Hawk estando aún en fase de
desarrollo para atender las tareas de reconocimiento y el notable incremento en el
presupuesto estadounidense a partir de los atentados de las Torres Gemelas que muestra la
Fig. 2-6 (OSD 2002)
Fig. 2-6: Perfil presupuesto estadounidense para UAVs
Como último punto de esta breve revisión histórica, merezca la pena destacar la inclusión de
misiles Hellfire en Predator, demostrando en Afganistán una alta letalidad contra blancos
móviles (Sánchez 2003). Esto supone un paso cualitativo importante, pues supone un cambio
de mentalidad desde la plataforma de observación a avión con capacidad de ataque por sí
mismo.

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 19
Fig. 2-7. Predator disparando un misil Hellfire
2.6 Clasificación de los UAS
Existen múltiples criterios para clasificar los UAVs. Algunos se basan en la división civil/militar,
otros en el sistema de recogida y/o lanzamiento, por aplicaciones… Pero la más extendida es la
basada en el MTOW (Maximum Take off Weight) que, en términos generales, conlleva unas
prestaciones de autonomía y alcance (Tabla 1).
Tabla 1. Clasificación de los UAVs
Dentro de esta clasificación resulta de interés analizar la distribución del número de UAVs. En
la Fig. 5-3 se aprecia como la mayor parte de la producción se centra en UAV de pequeño
tamaño (comprendido entre Micro y Medium Range), ya que este segmente presenta la

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 20
facilidad de empleo (requiere poca infraestructura), desarrollo (dimensiones y prestaciones de
los equipos e aviónica) y la viabilidad económica necesaria para facilitar su desarrollo. Existe
otro nicho de mercado que incluye los MALEs, HALEs y UCAVs. Este segundo grupo, si bien es
menos numeroso, es económicamente más importante, puesto que representan proyectos
tecnológicos muy innovadores y costosos auspiciados por entidades militares,
fundamentalmente estadounidenses. Ejemplos de este segundo grupo pueden ser el Predator
B, el Global Hawk y el X-45.
Fig. 2-8. Distribución de UAVs por segmentos
2.7 Aplicaciones de los UAVs
Se ha mostrado las capacidades de los UAVs. Estas aptitudes pueden emplearse en tantos
campos como se desee. De entre ellos caben destacar:
- Monitorización de fenómenos ambientales: como fuegos forestales (Merino 2006),
nubes tóxicas, tsunamis, terremotos… (Adams 2011)
- Reabastecimiento en vuelo: aunque es una tecnología aún en desarrollo (Fig. 2-10), ya
hay experimentos de reabastecimiento en vuelos entre UAVs y aeronaves tripuladas
(Pultrych 2010).
- Vigilancia de fronteras: existen varios informes que muestran las ventajas del empleo
de esos aparatos para garantizar la integridad de los límites nacionales (Haddal 2010).
Esto ha decantado a países como Estados Unidos para la adquisición de Predators para
este cometido (Homeland Security NewsWire 2010)

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 21
- Patrulla marítima: las largas misiones de patrulla sobre las aguas del mar donde
cualquier movimiento destaca respecto a la uniformidad parecen idóneas para los
UAVs. Como muestra de ello está el caso de la adaptación de un Predator B para la
Protección de las Aguas estadounidense bajo la designación Guardian (US CUstoms
and Border Protection s.f.)
- Cartografía: existen diferentes líneas de investigación en lo referente a cartografía
digital mediante UAVs, desde las basadas en modelos de elevación del terreno
mediante barridos laser o radares de apertura sintética a las basadas en rectificación
de imágenes aéreas para analizar la superficie, incluso en tiempo real (Gademer 2009).
Algunos autores realizan fusión sensorial para combinar la información de ambos
sensores (Nagai 2008)
- Reconocimiento: como se expuso en la revisión histórica, las labores de
reconocimiento fueron el primer cometido asignado. Si bien es cierto que en sus
primeras acciones fue estratégico, rápidamente se incluyó el táctico con labores sobre
el campo de batalla. Actualmente, el pequeño tamaño de muchos aparatos permiten
incluso a un soldado llevar a su espalda un UAV lanzado con su propio brazo para
disponer de una visión panorámica de su entorno más inmediato.
- Apoyo aéreo cercano: como se expuso en la revisión histórica, los Predator están
desarrollando tareas de interdicción con amplio éxito demostrado en los actuales
conflictos de Irak y Afganistán.
- Penetración furtiva: los UAVs de observación táctica poseen pequeño tamaño,
pequeña firma de radar y son bastante silenciosos, los que los hace idóneos para las
tareas de infiltración furtiva.
- Blanco y señuelo: las pruebas de nuevo armamento, así como el entrenamiento de
pilotos de combate. En España, el Instituto Nacional de Técnicas Aeroespaciales
dispone de dos modelos, el ALBA, para entrenamiento de artillería antiaérea y el
DIANA para prácticas más avanzadas (INTA 2009)
- Comprobación de infraestructuras: en casos como gaseoductos, oleoductos
(Aeronautics 2007), redes eléctricas… es de especial interés por la longitud del la obra
a chequear y la inaccesibilidad del terreno que en muchas ocasiones recorren.
- Monitorización de tráfico: las técnicas actuales de monitorización de tráfico se basan
principalmente en bobinas enterradas bajo la vía (Srinivasan 2004). Sin embargo esto
presenta la limitación de que únicamente permite el conteo. El desarrollo de nuevas
técnicas vbasadas en vision aporta más información, pero presenta el problema del
soporte de la cámara. Construir mástiles es caro y poco flexible y emplear aeronaves
tripuladas es demasiado caro. Se ha demostrado cómo (Coifman 2006) es posible
emplear de forma efectiva UAV para la monitorización de tráfico.
- Seguimiento de poblaciones animales: existe un gran interés en el control de
poblaciones animales, ya sea para proteger especias en peligro, para realizar
investigaciones biológicas (Junta de Andalucía 2011) o simplemente como elemento
que facilite su captura. Diferentes aparatos han mostrado sus capacidades en estos
campos (Koski 2009).
- Pseudosatélites (Kopp 2008) : el elevado coste asociado a poner en órbita una carga de
pago hace que cualquier alternativa a los satélites sea muy tentadora. En este sentido,

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 22
se utilizan UAVs como pseudosatélites capaces de realizar las mismas tareas de
monitorización y comunicaciones. Si bien es cierto que conllevan la pérdida de
cobertura y la ventaja de poder sobrevolar cualquier espacio aéreo sin violar la
territorialidad de ningún país, aportan mayor flexibilidad y sobre todo mucho menor
coste. Para este tipo de aplicaciones, además de UAVs convencionales con gran
autonomía empiezan a extenderse dirigibles automatizados que presentan la ventaja
de minimizar el consumo de combustible y permitir mayores altitudes.
Fig. 2-9. Esquema de funcionamiento de pseudosatélites
La lista de aplicaciones es tan extensa como permite la imaginación. En general cualquier
actividad que suponga tarea aéreas tediosas o peligrosas y pueda realizarse de forma más
segura, económica y eficiente con el empleo de UAS.
Si bien es cierto que no todas las aplicaciones comentadas son viables actualmente, existen
estimaciones para su implementación a corto plazo, una vez que la tecnología sea capaz de
afrontar los nuevos desafíos (Fig. 2-10 (Departament of Defence 2007))
Fig. 2-10. Previsión de nuevas aplicaciones por fecha

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 23
Tabla 2. Evolución del estado de la técnica
Fig. 2-11. Distribución por orientación del producto

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 24
2.8 Tecnologías involucradas
En cualquier desarrollo aeronáutico, dada la complejidad del sistema, ramas de prácticamente
todas las áreas de la ingeniería resultan involucradas. En el caso de UAVs, este carácter
multidisciplinar se acentúa aún más si cabe.
La automatización es uno de los principales puntos tecnológicos ya que permite minimizar la
participación humana y los requisitos de ancho de banda. Además el desarrollo de de esta área
permitirá aumentar la coordinación cooperativa entre varios aparatos, dando pie a nuevas
aplicaciones.
Otro campo destacado es el estudio de los procesos cognitivos, que influye desde dos
perspectiva. En primer lugar, los robots aéreos se emplean para extender la capacidad de
acción y percepción de las personas. Por tanto, la interfaz con el usuario debe estar lo más
orientada posible hacia el usuario humano y a su forma de percibir y razonar. Por otra parte, el
potencial del cerebro humano proporciona un potencial inigualable para afrontar diferentes
problemas. Actualmente se hace mucho hincapié en desarrollar algoritmos capaces de
mimetizar estos procesos cerebrales.
A continuación se detallan los elementos tecnológicos más críticos que convergen en el
desarrollo de los UAV: sensores, comunicaciones y sense and avoid.
2.8.1 Sensores Aunque en el Capítulo 5 se tratará con más profundidad el tema de las cámaras digitales, es
conveniente realizar una visión general de las diferentes cargas de pagos sensoriales.
Los sensores constituyen la principal carga de pago de los UAV y en la mayoría de los casos los
elementos que permiten llevar a cabo la misión asignada. Los sensores ´responden a un doble
objetivo, tanto analizar el fenómeno a estudio como permitir la operación de la aeronave al
posibilitar la navegación segura (Sense and avoid).
De entre la extensa lista de sensores empleados, caben destacar los siguientes (Excellence, US
Army UAS Center of 2009)
- Electro-ópticos (EO): son capaces de registrar la radiación electromagnética en el
espectro visible. Permiten la captura tanto de imágenes estáticas como de vídeos.
Gracias al desarrollo de las técnicas de visión artificial permiten obtener una gran
cantidad de información de las escenas.
- Infrarrojo (IR): son cámaras que operan en el espectro infrarrojo. Son similares a las
anteriores pero con la ventaja añadida de añadir una información que escapa a la
percepción humana pero tiene múltiples aplicaciones, como detección de elementos
en condiciones de baja visibilidad o camuflados, detección de fugas…
- Radar de Apertura sintéticas (SAR): proporciona imágenes todo tiempo de alta
resolución de un área extensa. Proporciona la ventaja de alto alcance de la señal de
radar y la capacidad actual de los modernos procesadores de tratar con información
compleja de alta resolución. Constituye un gran complemento a los EO por su

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 25
independencia de las condiciones atmosféricas y de iluminación. EL SAR se ha
empleado con éxito en la recopilación del perfil del terreno, exploración mineral,
monitorización de mareas negras…
- Detectores de movimiento (MTI, Moving Target Indicator): es un radar con la
particularidad de mostrar sólo aquellos elementos en movimiento.
- LIDAR (Light Detection And Ranging): El LIDAR mide la distancia y velocidad al objeto
señalado con gran precisión. Posee un funcionamiento análogo al radar con la
salvedad que las ondas de radio son sustituidas por pulsos láser. Posee por tanto
prestaciones similares al radar convencional pero con mayor precisión y menor
volumen y consumo.
- Laser-Radar (LADAR): permite la adquisición de información tridimensional de las
escenas. Puede penetrar a través de cubiertas como vegetación o camuflajes.
- Detector de explosivos químicos, biológicos, radiológicos o nucleares (CBRNE): el
desarrollo de sensores CBRNE más pequeños, ligeros y sensibles permite aplicar estos
sensores en UAVs, con claras aplicaciones a la seguridad.
- Monitorización de señales (SIGINT, Signal Intelligence): permiten la detección,
identificación, geolocalización y copia de las señales de radio del entorno, permitiendo
a los servicios de inteligencia de las fuerzas de seguridad conocer las capacidades,
disposición, composición e intenciones de los elementos vigilados. Por cuestiones de
seguridad los datos recogidos suelen ser procesados a posteriori en tierra
- Señalizadores laser: poseen una doble función. Por un lado proporcionan medidas
instantáneas de la posición y velocidad del objeto designado. Por otro, desde un punto
de vista militar, permite la señalización de blancos.
- Sensores meteorológicos: adquieren información del estado de la atmósfera (Reuder
2009), tales como presión, humedad, temperatura, radiación solar con gran precisión
2.8.2 Comunicaciones Son cruciales para permitir el flujo tanto de datos de sensores como de señales de mando y
control. Las comunicaciones aeronáuticas tradicionales se establecen y regulan a través de tres
medios diferentes (Stacey 2008):
- Señales de radio de alta frecuencia (HF): proporcionan señales de alcance
intercontinental gracias a la reflexión en la Ionosfera. Si bien el alcance proporciona
una gran ventaja, el mecanismo por el que la obtiene conlleva múltiples problemas.
Así, las interferencias y ruidos son significativos. Además, al depender de la Ionosfera,
el canal es sensible a la radiación solar, condiciones atmosféricas… Estas características
hacen que sea poco empleado en UAS
- Señales de radio muy alta frecuencia (VHF): Las comunicaciones VHF son un método
muy eficiente de establecer enlaces de datos dentro de visión. Las señales en este
rango presentan alta robustez frente a interferencias y ruidos. Es ampliamente
utilizado en comunicaciones aeronáuticas civiles y militares. En el caso de UAVs
pueden emplearse algunas de las versiones de datalink ya existentes, como VDL2, VDL
y VDL4 en el caso de civil y JTDIS/MIDS en el caso militar.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 26
La legislación actual estipula los rangos de frecuencia para comunicaciones
aeronáuticos tanto civiles (canalizaciones de 8,3 o 25 kHz entre 118 y 137 MHz) como
militares (Fig. 2-12).
Fig. 2-12. Frecuencias empleadas en comunicaciones militares
- Comunicaciones Satélites: permiten el establecimiento de comunicaciones más allá de
la línea directa con una gran fiabilidad del canal. Los satélites disponen de una gran
cobertura y de una alta tasa de disponibilidad, pero plantean el inconveniente del
costo de la infraestructura y del retraso asociado, muy importante para un sistema tan
dinámico como una aeronave.
Debido a la falta de fiabilidad del sistema HF en UAVs convencionales se emplea VHF para
comunicaciones dentro de la línea de visión o comunicaciones satélites para aumentar la
cobertura.
Además de estas frecuencias reservadas y legisladas por organismos internacionales, también
se emplean otras como 35, 40, 72, 900 MHz y 2.4, 5.4 GHz admitiendo en ocasiones
canalización en frecuencia en torno a ese valor central. Las frecuencias de 2.4 y 5.4 GHz suelen
ser utilizadas para la emisión de señales de vídeo o telemetría. Los autopilotos comerciales de
bajo coste más extendidos en el mercado, el AP04 de UAV Navigation (UAV Navigation 2009) y
el Piccolo II de Cloud Cap (Cloud Cap Technology 2010) emplean sistemas muy similares
basados en tecnología de espectro ensanchado por salto en frecuencia (frecuency hoping
spread spectrum) en un rango de frecuencias de entre 902-928 MHz (50 canales de 350 kHz)
con una tasa 115.2 bps y un alcance de 100 u 50 km respectivamente.
Por último, cabe destacar el uso de otros sistemas de comunicación para aeronaves de corto
alcance, como puede ser el empleo de los diferentes normalizados protocolos IEEE. La ventaja
de estos protocolos radica en que permite simplificar la gestión de las comunicaciones al poder
utilizar hardware y software ampliamente extendidos.

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 27
- IEEE 802.15.4 (Zigbee): se caracteriza por minimizar el consumo de potencia, con una
tasa de envío baja. Ejemplo de aplicación son algunos modelos de quadrotors, como el
Hummingbird de Ascending Technologies. Este aparato emplea módulos X-bee que,
mediante técnicas de canalización en frecuencia, comunican el host con el UAV. El Up-
link envía referencias posición y trayectorias mientras que el Downlnk transmite daos
telemétricos. Además, puede operar como aparato de radiocontrol a través de una
emisora Spectrum
- IEEE 802.15.1 (Bluetooth): Permite una conexión sencilla y la formación de redes Ad-
hoc con mayor tasas de transmisión pero a la vez mayor consumo que el Zigbee. Como
ejemplo, el CoaX, un minihelicóptero de rotor coaxial diseñado por la empresa
Skybotix, emplea este protocolo.
- IEEE 802.11 (Wifi): Se ha demostrado en varias ocasiones que es posible emplear este
estándar para soportar comunicaciones con UAVs, tanto de telemetría como de
control e incluso de imágenes. Un paso más consiste en ser capaz de definir redes ad-
hoc, lo cual permitiría facilitar los vuelos cooperativos y la gestión de Red de
Telecomunicaciones aeronáuticas (Brown s.f.).
Desde un punto de vista práctico, muchos UAVs emplean equipos de comunicación
comerciales (COTS). Esto permite abaratar precios y agilizar los desarrollos, pero también
limita los nuevos desarrollos que requiere productos a la carta para optimizar las prestaciones
de los equipos, como rango de frecuencias o integración con otros sistemas. El avance en el
área de las comunicaciones pasa por superar esta barrera de diseño.
2.8.3 Sense & Avoid La función de observación del espacio aéreo cercano para evitar obstáculos y conflictos entre
trayectorias, se denomina genéricamente Sense and Avoid. Con el fin de garantizar la
seguridad de la operación de forma que se garantice su funcionamiento aun con fallo de las
comunicaciones.
El objetivo final de esta tecnología, es garantizar la capacidad del UAV de operar en un espacio
aéreo no segregado con al menos el mismo nivel de seguridad que una aeronave tripulada.
Las técnicas de S&A se clasifican en cooperativas (como el TCAS o el ADS) o no cooperativas (P.
ej. Radar primario) en función de si el obstáculo e evitar participa del proceso de adquisición
de la información y toma de decisiones.
Como su propio nombre indica, la capacidad S&A consta de dos elementos diferenciados:
2.8.3.1 Sense
Existen diversos tipos y tecnologías de sensores utilizables en el subsistema Sense, entre los
que cabe destacar: radar, electro-ópticos, Ladar, acústicos y sistemas cooperativos.
Normalmente se deberán combinar diferentes tipos de sensores e integrar la información
generando la entrada adecuada para los procesadores encargados de la función Avoid.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 28
Sensor Ventajas Inconvenientes
Radar onda milimétrica
Gran precisión en distancia y velocidad
Peso, dimensiones y consumos muy elevados Pobre resolución angular
Radar laser Posición y velocidad precisos Precisión cono
Barrido limitado, requiere instalación de varios Sensible a condiciones atmosféricas
Electroópticos Gran resolución angular No determinan con precisión distancia y velocidad Muy sensibles condiciones atmosféricas
Acústicos Gran cobertura Poco sensible meteorología
Poco alcance
Tabla 3. Características de los sensores desde el punto de vista de S&A
Los sistemas denominados «cooperativos» requieren que el intruso vaya convenientemente
equipado, lo cual no se puede asegurar en todos los casos por lo que, por si solos, no
proporcionan el nivel de seguridad deseado.
La solución parece estar en la combinación de dispositivos radar y electro-ópticos que aúnan
las ventajas de ambos y anulan muchas de sus desventajas. Aunque este tipo de soluciones
incrementan considerablemente el coste y el peso del sistema Sense. En la figura siguiente se
muestra una posible configuración de un sistema combinado.
2.8.3.2 subsistema Avoid
Es el encargado de procesar la información que recibe del subsistema Sense y del FMS con el
fin de determinar si en un futuro más o menos próximo se puede producir una situación
conflictiva y en tal caso plantear una maniobra de evasión. Siguiendo las especificaciones de
Eurocontrol, el subsistema Avoid enviará a la estación de control en tierra la información que
pudiera ser de interés al piloto al mando (posible tráfico peligroso, trayectoria de la maniobra
de evasión calculada, etc.).
2.9 Integración en el espacio aéreo
Hoy por hoy, las aeronaves no tripuladas se ven obligadas a operar en espacios aéreos
segregados o restringidos (temporales o permanentes), utilizando pasillos abiertos
temporalmente para el acceso a la zona de trabajo. Se intenta evitar cualquier tipo de
conflictos con los vuelos tripulados evitando normalmente las operaciones de «cross-border»,
pues estas operaciones implican acuerdos internacionales que aún no están debidamente
establecidos. Esta situación no puede ser superada hasta que las autoridades aeronáuticas
consideren que dichas aeronaves han alcanzado un «nivel de seguridad equivalente» al de la
aviación convencional y no representan un riesgo adicional para el tráfico aéreo o los bienes
en tierra, momento a partir del cual podrán operarse estas plataformas compartiendo el
espacio aéreo con la aviación convencional.

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 29
Además, la gran diversidad de UAS y sus diferentes características y prestaciones, precisaría
determinar las «categorías» de UAS que habrían de ser objeto de estudio en relación a su
integración, pues muchos de estos sistemas operan a cotas muy bajas o con alcances y
permanencias en vuelo muy limitadas, tienen una baja masa o MTOW, o bien la energía
cinética que desarrollan es muy baja, por lo que no parece probable que se deban someterse a
requisitos específicos orientados a permitir su uso en espacio aéreo no segregado.
La integración es un objetivo a medio plazo (estimado para 2015-2020) y fuertemente
condicionado a dos puntos: la madurez de las tecnologías involucradas y el desarrollo de una
legislación adecuada. El primer punto se trató en el apartado 2.8. Respecto al segundo, caben
destacar las siguientes iniciativas reguladoras
- EASA: proporciona una guía de certificación para UAVs en Europa que superen los 150
kg de MTOW. Para aviones de menor masa la responsabilidad sobre las certificaciones
de aeronavegabilidad (uno de los aspectos básicos para la integración) recaería sobre
las autoridades nacionales. Tiene en cuenta diferentes perspectivas del problema
desde la visión social a la tecnológica. Establece una equivalencia entre la normativa
de aviación comercial europea existente basándose en la Energía Mecánica asociada al
vuelo de la aeronave (EASA 2005).
- FAA: la normativa actual solo permite el vuelo de UAVs cubierto bajo un Certificado
de Experimentación en el caso de UAVs comerciales y de un Certificado de
Autorización, para aparatos Gubernamentales (FAA 2012). La FAA posee un Roadmap
con diferentes hitos que se basan en la recopilación de información y en la
demostración de capacidades tecnológicas para asegurar una integración segura.
2.10 Futuro
Si bien es evidente y manifiesta la tendencia alcista del mercado de UAS, tanto en aparatos,
como aplicaciones o inversiones, prever con certeza el futuro de la aeronáutica es incierto. Así
por ejemplo, puede encontrarse desde vaticinios demasiado optimistas, como las palabras del
general Hap Arnold de la Fuerza Aérea de los Estados Unidos En 1945: “En la próxima guerra
probablemente se combata con aviones sin tripulantes” (Pérez 2003) a otros más moderados,
como el director del Comité de Servicios Armados del Senado Estadounidense Michael G.
Mullen: “Hay personas que ven en el F-35 el último caza – o cazabombardero- tripulado, y yo
soy uno de ellos” (Tirpak 2009). En cualquier caso, parece que en los próximos lustros veremos
una cooperación cada vez más estrecha entre vehículos autónomos y tripulados, en que se
tendrán que desarrollar mecanismos para posibilitar una adecuada integración (Departament
of Defence 2007).
Quizás la mejor prueba de la certeza del futuro de los UAVs sea la evolución de volumen de
mercado que suponen. En la Fig. 2-6 ya se mostró la evolución del presupuesto de Estados
Unidos destinado a estos sistemas. Esto puede llevar a forjar la equivocada opinión de que el
desarrollo de los UAVs es un fenómeno local de ese país o que está únicamente vinculado a
usos gubernamentales. Como muestra del carácter universal de la proliferación de los UAS la

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 30
Fig. 2-13 muestra unas tendencias muy similares para aplicaciones comerciales en Europa
(UAVNET 2005).
Fig. 2-13. Mercado de UAVs civiles en Europa
Desde un punto de vista tecnológico existen novedosos desarrollos en el área de la
aerodinámica que prometen una nueva generación de UAVs avanzados. En la literatura se
conocen como push factors (Departament of Defence 2007). De entre ellas cabe destacar:
- Ciencia de los materiales: el desarrollo de las nanopartículas es la clave para llevar la
miniaturización un paso más allá, así como permitir nuevas aplicaciones, como
aplicaciones de comunicación basadas en resonancias de nanotubos o materiales que
cambian sus propiedades de opacidad, transparencia y color a placer.
- Termodinámica: las células de combustible con membrana intercambiadora de
protones ofrece relaciones de potencia peso equivalente a motores de combustión
interna con la ventaja de reducir la firma acústica y simplificar la realización mecánica,
con la consiguiente reducción de mantenimiento
- Aerodinámica: el diseño bioinspirado aplicado al diseño aerodinámico se plasma en las
morphing wings, alas que optimizan la curvatura de las superficies aerodinámicas en
función de la condición de vuelo. El DARPA experimenta con un prototipo
rudimentario, pero en el futuro se espera modificar sustituir las técnicas actuales de
control de aeronaves eliminando complejos mecanismos y pesados actuadores
hidráulicos por otros más eficientes.
- Electrónica: a la profundización de los MEMS para la reducción de actuadores se une
las nanopartículas magnéticas, que tienen el potencial de aumentar la densidad de
almacenamiento hasta el Terabyte por pulgada cuadrada. El aumento de memoria irá

Capítulo 2. Sistemas Aéreos Autónomos
Pág. 31
acompañado de la potencia de cálculo según la Ley de Moore, habilitando nuevas
aplicaciones de algoritmos de percepción y control. Las tecnologías más vanguardistas
en ciencia de la computación como chips biológicos (“moletronics”) o computación
cuántica requiere al menos dos décadas.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 32
Recommended