Digital Filter Stepsize Control
in DASPK and its Effect on
Control Optimization Performance
Kirsten MeekerUniversity of California, Santa Barbara
Introduction
Solutions vs. perturbed initial conditions not smooth for adaptive ODE/DAE solvers
In optimal control or parameter estimation of ODE/DAE systems, optimization performance depends on smoothness of solution vs. small perturbations in control parameters
Digital filter stepsize control Smoother solution dependence More efficient optimization search Söderlind and Wang, Adaptive time-stepping and
computational stability, ACM T Comp Logic, 2002

Outline
DAE solver - DASPK Stepsize controllers Optimizer - KNITRO Test Results
Simulation Sensitivity analysis Optimization

DAE solver - DASPK
Backward differentiation formula Approximates y' using past y values
Newton’s method Find yn at each time step Linear systems solved by direct method or preconditioned
Krylov iteration• Li and Petzold, Software and Algorithms for Sensitivity Analysis of Large-
Scale Differential Algebraic Systems, UCSB, 2000
00 )(
0)',,(
yty
yytF
k
iinin yyh
00 '

Original Stepsize Control
order ,ˆerror local , ranceerror tole
ˆ 1
1
1
kr
hr
h
n
n
k
nn
New Digital Filter Stepsize Control
41
ˆˆ
221
111
221
kk
hh
h
rrh n
n
n
nnn

Controller Frequency Response
Simple controller - emphasizes high frequencies stepsize and local error rougher than disturbance
Digital filter - uniform frequency response smoother stepsize and local error
Controller Processnr̂h

Given DAE system
Minimize objective function
Sequential quadratic programming Sensitivity derivatives from DASPK
Trust regions to solve non-convex problems
R. A. Waltz and J. Nocedal, KNITRO User's Manual Technical Report OTC 2003/05, Optimization Technology Center, Northwestern University, Evanston, IL
Optimizer - KNITRO
dttuptyt ))(,),(,(
00 ),(
0))(,,',,(
ypty
tupyytF

Test Results
Simulation Sensitivity analysis Optimization

Simulation Test Results
36 - 54% fewer time steps 22 - 50% faster CPU time Smoother stepsize changes Larger stepsizes when solution
near constant

Sensitivity Test Results
15 - 16% fewer time steps 34 - 65% more Newton iterations 0 - 40% slower CPU time

E. Coli Heat Shock Heat causes unfolding, misfolding, or aggregation
of cell proteins Stress response is to produce heat-shock proteins
to refold denatured proteins Model first order kinetics (law of mass-action) Stiff system of 31 equations
11 differential 20 algebraic constraints
H. El Samad and C. Homescu and M. Khammash and L.R.Petzold, The heat shock response: Optimization solved by evolution ?, ICSB 2004

Optimality of Heat Shock Response
For a given α, minimize Jα with respect to θ
Cost of chaperones (scaled by 1010)
Cost
of
un
fold
ed
pro
tein
s (
scale
d b
y
10
10)
Wild type heat shock
Various nonoptimal valuesof parameters
Pareto Optimal Curve
100
80
60
40
20
0
10 11 12
J () [chaperones]2dt t0
t1
[Pun ]2dt
t0
t1

Heat Shock Performance Stage 1
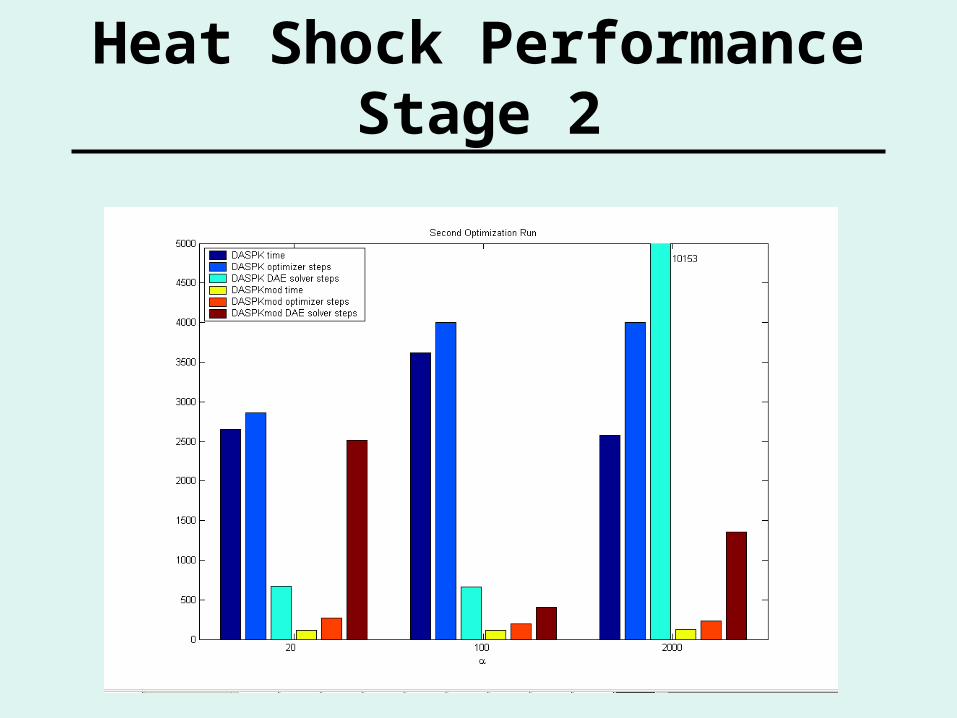
Heat Shock Performance Stage 2

Summary of Optimization Test
Results E. Coli heat shock
95% fewer time steps 97% faster CPU time
2D heat, halo orbit insertion - no change

Summary and Conclusions
Implemented a Digital Filter Stepsize Controller into DASPK3.1
Tested on several problems involving simulation and sensitivity analysis, and found that: Overall efficiency was roughly
comparable to that of DASPK Stepsize sequences used were
smoother with the new digital filter stepsize controller
Summary and Conclusions
Tested on several problems involving optimization of DAE systems, and found that: For two problems that are not very challenging,
the performance was comparable to that using original DASPK
For a highly nonlinear heat shock problem involving a wide range of scales, the optimizer required dramatically fewer iterations when using DASPK3.1mod to solve the DAEs. We conjecture that this is due to the smoother dependence of the numerical solution on the parameters.

Thanks!
Linda Petzold, Thesis Advisor John Gilbert, Committee Mustafa Khammash, Committee Söderlind and Wang, Digital filter
stepsize controller Chris Homescu, Hana El-Samad,
Mustafa Khammash, E. Coli Heat Shock

Newton’s Method
)(
)()('
,1,0 )(
0)(')()(
0)1
,,(
1
1
1
00
n
nn
nnn
nnn
k
iini
ygyJ
yghyg
ygy
gyy
yhgygyg
yh
ytF
Recommended









![The Meeker herald (Meeker, Colo.) 1903-07-04 [p ]](https://img.pdfslide.net/doc/110x75/62b88fae81a59d5f663b1821/the-meeker-herald-meeker-colo-1903-07-04-p-.jpg)





