Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
DISCRETE EVENT SYSTEMS
CONTROLLO SUPERVISIVO
Redazione a cura del Dr. Ing. Francesco Liberati ([email protected])

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
INDICE DELLA LEZIONE
INTRODUZIONE
CONCETTO DI CONTROLLO A FEEDBACK PER I DES:
RUOLO OSSERVABILITA’
RUOLO CONTROLLABILITA’
DEFINIZIONE DELLE SPECIFICHE
SUPERVISORI
TEOREMA DI CONTROLLABILITA’

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
NELLE PRECEDENTI LEZIONI ABBIAMO STUDIATO LA MODELLAZIONE E L’ANALISI DEI DES
AD ANELLO APERTO. QUI INTRODUCIAMO IL CONCETTO DI CONTROLLO A FEEDBACK
TRAMITE IL DESIGN DI UN SUPERVISORE.
COME PER LA TEORIA DEI SISTEMI CLASSICA, EMERGONO DUE TIPICI PROBLEMI:
• SIGNIFICATO E DEFINIZIONE DELLE SPECIFICHE;
• DESIGN DEL CONTROLLORE PER IL SODDISFACIMENTO DELLE SPECIFICHE.
QUESTI PROBLEMI SARANNO RIFORMULATI NEL SEGUITO PER I DES FACENDO
RIFERIMENTO ALLA NOZIONE DI LINGUAGGIO E DI OPERAZIONI SUI LINGUAGGI.
INTRODUZIONE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
CONTROLLO SUPERVISIVOLA TEORIA DEL CONTROLLO SUPERVISIVO FU FONDATA NEGLI ANNI OTTANTA AD OPERA DI P. J. RAMADGE E W. M. WONHAM.
L’IDEA DI BASE E’ SEMPLICE, E SI ARTICOLA SECONDO I SEGUENTI PASSI:
UN AUTOMA DESCRIVE IL COMPORTAMENTO AD ANELLO APERTO DI UN DES
G
NON SEMPRE TALE COMPORTAMENTO E’ SODDISFACENTE: ALCUNE PAROLE IN VIOLANO DELLE SPECIFICHE (NON-BLOCKING, SAFETY,...)
)(GL
SI INTRODUCE UN SUPERVISORE CHE RESTRINGA IL COMPORTAMENTO DEL SISTEMA AD UN SOTTO-INSIEME ACCETTABILE DI )(GL

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
IDEA DI SPECIFICHEIL PUNTO DI PARTENZA PER LA DEFINIZIONE DELLE SPECIFICHE E’ L’ANALISI DI .
LE SPECIFICHE ASSICURANO CHE DA VENGANO ELIMINATE LE STRINGHE ILLEGALI O INAMMISSIBILI. AD ESEMPIO:
• STRINGHE CHE PORTANO A BLOCCO;
• STRINGHE CHE PORTANO A STATI NON-SAFE;
• SOTTOSTRINGHE CHE NON RISPETTANO IL DESIDERATO CRITERIO DI
ORDINAMENTO DEGLI EVENTI ;
• ...
)(GL
)(GL
SPECIFICHE
DEFINIZIONE DI UN SOTTO-LINGUAGGIO
AMMISSIBILE
DEFINIZIONE DI UN RANGE DI SOTTO-LINGUAGGI AMMISSIBILI
)(GLLa
)(GLLL am

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
SUPERVISORE: IDEA DI BASEPER CONTROLLARE (RESTRINGERE) IL COMPORTAMENTO DI UN DES AD ANELLO APERTO SI INTRODUCE UN SUPERVISORE S.
S OSSERVA LA CATENA DEGLI EVENTI ESEGUITI DA G. SULLA BASE DELL’OSSERVAZIONE DECIDE, IN OGNI STATO, QUALI TRA GLI EVENTI ATTIVI SONO CONSENTITI E QUALI NO.
S
G
OSSERVA ABILITA O DISABILITA
PIENA CONTROLLABILITA’? PIENA OSSERVABILITA’?

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
CONTROLLABILITA' DEGLI EVENTIABBIAMO GIA’ TRATTATO DELLA OSSERVABILITA’ DEGLI EVENTI.
PER IL MOMENTO ASSUMIAMO CHE IL SUPERVISORE POSSA OSSERVARE TUTTI GLI EVENTI.
PER CARATTERIZZARE LA CAPACITA’ DI INTERVENTO DI S SU G, L’INSIEME DEGLI EVENTI DI G PUO’ ESSERE PARTIZIONATO IN DUE SOTTOINSIEMI.
unObsobs EEE
ucc EEE DOVE:
• E’ L’INSIEME DEGLI EVENTI CONTROLLABILI, QUELLI CIOE’ CHE POSSONO
ESSERE DISABILITATI DAL SUPERVISORE;
• E’ L’INSIEME DEGLI EVENTI INCONTROLLABILI, IL SUPERVISORE NON
PUO’ IMPEDIRE CHE TALI EVENTI ACCADANO (e.g.: GUASTI).
cE
ucE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
DESCRIZIONE MATEMATICA DEL SUPERVISOREFORMALMENTE QUINDI, UN SUPERVISORE E’ UNA FUNZIONE:
EGLS 2)(:
PER OGNI , INDICHIAMO CON , L’INSIEME DEGLI EVENTI ABILITATI DA S.
)(GLs )(sS
QUINDI , E’ L’INSIEME DEGLI EVENTI ABILITATI NELLO STATO ),()( 0 sxsS ),( 0 sxf
POICHE’ ESISTONO EVENTI INCONTROLLABILI, PER COERENZA ASSUMIAMO CHE ESSI NON POSSANO ESSERE BLOCCATI:
)(),( 0 sSsxEuc SUPERVISORE AMMISSIBILE
POLITICA DI CONTROLLOAZIONE DI CONTROLLO
S
)(sS

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
DESCRIZIONE MATEMATICA DEL SUPERVISORE (cont.)S E’ UN CONTROLLORE DINAMICO POICHE’ AGISCE SU STRINGHE, NON SU SINGOLI STATI:
EGLS 2)(: EXS 2: DINAMICO STATICO
L’UNIONE A FEEDBACK DI S E G E’ UN DES E SI DENOTA CON S/G. LE PAROLE GENERATE E MARCATE DA QUESTO NUOVO AUTOMA SONO SEMPLICEMENTE QUELLE IN CHE RIMANGONO AMMISSIBILI SOTTO L’AZIONE DI S:
)()( GLedGL m
)/()](),(),/([:2
)/(:1
GSLsesSeGLseGSLs
GSL
)()/()/( GLGSLGSL mm
GENERATO
MARCATO

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
PROPRIETA' L(S/G) E Lm(S/G)
)()/()/()/( GLGSLGSLGSL mm
S/G BLOCCANTE
)/()/( GSLGSL 1. L(S/G) E’ PREFIX-CLOSED
2. VALGONO LE INCLUSIONI
)/()/( GSLGSLm
)/()/( GSLGSLm S/G NON-BLOCCANTE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
PARZIALE OSSERVABILITA’
LE DEFINIZIONI SU DATE POSSONO ESSERE ESTESE AL CASO DI PARZIALE
OSSERVABILITA’
OSSERVA LE STRINGHE
PROIETTATE SU
ABILITA O DISABILITA
S
G
P
s
)(sP
))(( sPS
EP GLPS 2))((:
unObsobs EEE
obsE
SI ASSUME CHE L’AZIONE DI CONTROLLO ABBIA LUOGO APPENA DOPO L’ACCADERE DELL’ULTIMO EVENTO OSSERVABILE CONSENTITO

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
SODDISFARE LE SPECIFICHE (CASO OSSERVABILE)
SODDISFARE LE SPECIFICHE SIGNIFICA OTTENERE:
SPECIFICHE SUL LINGUAGGIO GENERATO
)()/( GLLGSL a
LA PRIMA RIGA IMPONE CHE IL LINGUAGGIO NON SIA PIU’ RICCO DI UN LINGUAGGIO MASSIMO CONSENTITO
)()/( GLLGSL mamm
)()/( GLLGSLL ar )()/( GLLGSLL mammrm
SPECIFICHE SUL LINGUAGGIO GENERATO MARCATO
aL
LA SECONDA RIGA IMPONE PURE CHE IL LINGUAGGIO CONTENGA ALMENO UN LINGUAGGIO MINIMO AMMISSIBILE
rL
closedprefixassuntoèLa

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
PER OTTENERE , SI COSTRUISCE DAPPRIMA UN AUTOMA CHE
DESCRIVA LA SPECIFICA DESIDERATA. QUINDI SI COMPONE TALE AUTOMA CON
G. IL RISULTATO E’ UN NUOVO AUTOMA CHE GENERA/MARCA PROPRIO IL
LINGUAGGIO AMMESSO PER G. IN ALTRE PAROLE:
MODELLIZZARE LE SPECIFICHE
LE SPECIFICHE SONO DATE IN TERMINI DI LINGUAGGI AMMESSI. ESSE
CORRISPONDONO AD ESIGENSE DEL TIPO:
1. EVITARE STATI ILLEGATI;2. MANTENERE ORDINAMENTO TRA EVENTI;3. FORZARE L’ALTERNANZA TRA EVENTI;4. IMPLEMENTARE POLITICHE DI SERVIZIO IN CODE;5. GESTIRE LA PRIORITA’;6. ...
specHama LoL
aspec LGHL )||( amspecm LGHL )||(

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
IL LINGUAGGIO AMMISSIBILE PER G (CHE SODDISFA CIOE’ LA SPECIFICA DI
ALTERNANZA TRA I DUE EVENTI) SI OTTIENE DALLA COMPOSIZIONE PARALLELA
DI G E Hspec.
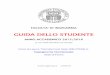
ESEMPIO: ALTERNANZA FORZATA DI DUE EVENTI
SI DESIDERA CHE DUE EVENTI, DETTI a E b, OCCORRANO SEMPRE IN PERFETTA
ALTERNANZA, A PARTIRE DA a. L’AUTOMA PER LA SPECIFICA E’ SEMPLICEMENTE:
:specH )||( GHLL speca
a
0 1
b
LA COMPOSIZIONE PARALLELA ASSICURA INFATTI SINCRONIZZAZIONE TRA G ED Hspec PER QUANTO RIGUARDA GLI EVENTI a E b: DUNQUE, POICHE’ I DUE EVENTI SI ALTERNANO IN Hspec, ALLORA SI ALTERNERANNO ANCHE IN G||Hspec.

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
SINTESI DEL SUPERVISORE
FINORA NON SI E’ TRATTATO DELLA SINTESI DEL CONTROLLORE. ESAMINANDO
SEMPLICI ESEMPI, E’ FACILE RENDERSI CONTO DI QUANTO LA PIENA O MENO
OSSERVABILITA’/CONTROLLABILITA’ DEL PLANT E LE ELEVATE DIMENSIONI
DELLO SPAZIO DI STATO, USUALI NELLA PRATICA, INFLUENZINO IL DESIGN DEL
SUPERVISORE E RENDANO NECESSARIO LO SVILUPPO DI METODI SISTEMATICI.
METODI FORMALI PER LA SINTESI NEL CASO DI:
1. PARZIALE CONTROLLABILITA’;
2. PARZIALE OSSERVABILITA’;
3. BLOCKING.

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
CONTROLLO NEL CASO DI PARZIALE CONTROLLABILITA’
ASSUMIAMO CI SIA PIENA OSSERVABILITA’. CI INTERESSA STUDIARE LA SINTESI
DI S NEL CASO DI PARZIALE CONTROLLABILITA’. ORA CI OCCUPIAMO SOLO DI
LINGUAGGI GENERATI (NON INTERESSA STUDIARE LE PROPRIETA’ DI BLOCCO).
ESISTE UN FONDAMENTALE TEOREMA DI CONTROLLABILITA’
),,,,,( 0 mXxfEXGDES Teorema (Teorema di Controllabilità-TC): SI CONSIDERI UN
IN CUI . PRESO UN QUALUNQUE SOTTO-LINGUAGGIO DI , CON
, ALLORA ESISTE UN SUPERVISORE TALE CHE SE E SOLO SE:
ucc EEE K )(GL KS KSGL )/(
ilitàcontrollabdicondizioneKGLEK uc )(
LA PROVA DELLA SUFFICIENZA E’ COSTRUTTIVA
))],(([}:{)( 0 sxfEKseEesS ucc
filosofia: rendi legale ciò che non puoi bloccare

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
Definizione (Controllabilità): SIANO DUE LINGUAGGI SU .
E’
DETTO CONTROLLABILE RISPETTO ED SE:
CONTROLLABILITA'
LA CONDIZIONE DI CONTROLLABILITA’ CUI FA RIFERIMENTO IL PRECEDENTE
TEOREMA PUO’ ESSERE ESPRESSA IN UNA FORMA PIU’ GENERALE:
LLedK ucc EEE
PROPRIETA’ DI CHIUSURA
KseLseEeKs uc ,,
filosofia: gli eventi incontrollabili non fanno uscire da
KL ucE
KLEK uc
EQUIVALENTEMENTE
K

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
TEST DI CONTROLLABILITA'
NEL CASO DI ED REGOLARI, SI PROCEDE COME SEGUE:
1. SI COSTRUISCE UN AUTOMA CHE GENERA , DETTO ;
2. SI COSTRUISCE UN AUTOMA CHE GENERA , DETTO ;
3. SI CALCOLA . LA CONTROLLABILITA’ SI VERIFICA COMPARANDO
L’INSIEME DEGLI EVENTI ATTIVI IN OGNI STATO DI CON L’ANALOGO
INSIEME PER IL CORRISPONDENTE STATO DI .
SE NEL SECONDO C’E’ UN EVENTO NON CONTROLLABILE CHE NON COMPARE
NEL PRIMO, ALLORA NON SI HA CONTROLLABILITA’.
COMPLESSITA’ COMPUTAZIONALE NEL CASO PEGGIORE: n NUMERO DI STATI DI Gm NUMERO DI STATI DI H
K L
K H
L G
GHGH
G
:)|(| dovemnE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
LA REALIZZAZIONE STANDARDUNA REALIZZAZIONE DI S E’ UN AUTOMA CHE RAPPRESENTI S. RICORDIAMO CHE, PER K CONTROLLABILE, CONOSCIAMO LA POLITICA DI CONTROLLO:
ALLORA, TROVIAMO DAPPRIMA UN AUTOMA R TALE CHE:
QUINDI, CALCOLIAMO IL PARALLELO TRA R E G. L’AUTOMA RISULTANTE
DESCRIVE S/G ED E’ DETTO REALIZZAZIONE STANDARD DI S. INFATTI:
ESESTONO REALIZZAZIONI PIU’ EFFICIENTI DI QUELLA STANDARD (ANCHE
QUANDO R E’ CANONICO)
))],(([}:{)( 0 sxfEKseEesS ucc
KRLRLm )()(
)/()()()()||( GSLKGLKGLRLGRL
)/()()/()()()()||( GSLGLGSLGLKGLRLGRL mmmmmm

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
ALCUNE PROPRIETA' DELLA CONTROLLABILITA'SEGUONO ALCUNE PROPRIETA’ NOTEVOLI:
IN PARTICOLARE, DUE LINGUAGGI SONO DETTI NON IN CONFLITTO SE
SODDISFANO L’ULTIMA CONDIZIONE (SE I LINGUAGGI CONDIVIDONO UN
PREFISSO, ALLORA CONDIVIDONO PURE LE PAROLE CHE CONTENGONO QUEL
PREFISSO)
ilecontrollabKKclosedprefixilicontrollabKKKK
closedprefixilecontrollabKKclosedprefixilicontrollabKeK
ma
ilecontrollabKKilicontrollabKeK
ilecontrollabKKilicontrollabKeK
212121
2121
2121
2121
,)(
,,

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
LINGUAGGI SUPREMAL ED INFIMALE’ IMPORTANTE CONSIDERARE ANCHE IL CASO IN CUI NON SUSISTA CONTROLLABILITA’:
RICORDANDO CHE K E’ IN L, HA INTERESSE ALLORA CAPIRE COME AMPLIARE K IN L, O COME RESTRINGERLO AL FINE DI GUADAGNARE LA PROPRIETA’ DI CONTROLLABILITA’:
KLEK uc
L
K
CK
CK
ucE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
LINGUAGGI SUPREMAL ED INFIMAL (cont.)IN PARTICOLARE, AL FINE DI “MINIMIZZARE” LA DISTANZA DA K, HA INTERESSE CERCARE:
1. LA PIU’ PICCOLA ESTENSIONE PREFIX-CLOSED DI K IN L CONTROLLABILE, DETTA SUPREMAL CONTROLLABLE LANGUAGE :
2. LA PIU’ GRANDE RESTRIZIONE DI K CONTROLLABILE, DETTA INFIMAL CONTROLLABLE LANGUAGE :
COMPLESSIVAMENTE, SI HA:
Cuc
CC KLEKLKK ,
Cuc
CC KLEKLKK ,
LKKKK CC
CK
CK

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
LINGUAGGI SUPREMAL ED INFIMAL (cont.)DEFINIAMO LE CLASSI DELLE RESTRIZIONI E DEGLI AMPLIAMENTI CONTROLLABILI DI K:
CIO’ PREMESSO, E’ FACILE MOSTRARE CHE:
}~~
:~{)( LLELKLKClass uc
C
}~~
,~~
,~
:~{)( * LLELLLLLKELKClass uc
C
SUPREMAL CONTROLLABLE LANGUAGE
INFIMAL (PREFIX-CLOSED) CONTROLLABLE LANGUAGE
JKKClassJ
C
C )(
JKKClassJ
C
C )(
CLASSE DELLE RESTRIZIONI CONTROLLABILI DI K
CLASSE DELLE RESTRIZIONI CONTROLLABILI DI K

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
IL RUOLO DEI LINGUAGGI SUPREMAL ED INFIMAL NEL PROBLEMA DELLA SUPERVISIONE
BASIC SUPERVISORY CONTROL PROBLEM: DATO UN DES G, CON INSIEME EVENTI
E DATO UN LINGUAGGIO AMMISSIBILE DESIDERATO, TROVARE
UN SUPERVISORE S, TALE CHE:
1. (PROPRIETA’ DI SAFETY);
2. SIA IL PIU’ GRANDE POSSIBILE (PROPRIETA’ DI OTTIMALITA’);
ucc EEE
aLGSL )/(
aL
)/( GSL
CIOE’ SI DESIDERA TROVARE LA LIMITAZIONE MINIMA ATTA AD ASSICURARE SAFETY. LA SOLUZIONE E’ DATA DA:
CaLGSL )/(
UN APPROCCIO ANALOGO SI ADOTTA NEL CASO DI SPECIFICHE SU INTERVALLO:
ar LGSLL )/(

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
CONTROLLO NON BLOCCANTE

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
CONTROLLO NON-BLOCCANTE NEL CASO DI PARZIALE CONTROLLABILITA’
DESIDERIAMO SINTETIZZARE UN SUPERVISORE NON-BLOCCANTE:
OSSERVAZIONI:
NELLA PRATICA, LE SPECIFICHE SI ESPRIMONO FISSANDO UN LINGUAGGIO DI
SPECIFICA (PREFIX-CLOSED) . DALLA SCELTA DI DISCENDE
NATURALMENTE QUELLA DEL LINGUAGGIO MARCATO DI SPECIFICA:
OSSERVIAMO UN FATTO IMPORTANTE:
)/()/( GSLGSLm
specL specL
mspecm LLL spec
closureGLdiproprietàLLL mmspecm
specm )(

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
Teorema (Teorema di Controllabilità non bloccante-TCN):
SI CONSIDERI UN E UN LINGUAGGIO ,
.
ALLORA ESISTE UN SUPERVISORE NON BLOCCANTE TALE CHE:
SE E SOLO SE:
NONBLOCKING CONTROLLABILITY THEOREM
LA PROPRIETA’ APPENA OSSERVATA ASSICURA, INSIEME CON LA CONDIZIONE DI
CONTROLLABILITA’, L’ESISTENZA DI UN SUPERVISORE NON BLOCCANTE:
),,,,,( 0 mXxfEXGDES )(GLK m K
closureGLGLKK
ilitàcontrollabdicondizioneKGLEK
mm
uc
)()(
)(
KGLKGLGSLGSL mmm )()()/()/(
KGSLedKGSLm )/()/(
NOTARE:

Facoltà di Ingegneria
Corso di Laurea:Insegnamento:Lezione n°:Titolo:Docenti:
INGEGNERIAAUTOMAZIONE II4CONTROLLO SUPERVISIVOPROF. ALESSANDRO DE CARLIDR. VINCENZO SURACI
SAPIENZA - Università di Roma – Dipartimento di Ingegneria Informatica Automatica e Gestionale Antonio Ruberti (DIS) Via Ariosto 25 - 00185 Roma – http://www.dis.uniroma1.it
Consigliati:[1] Cassandras, Lafortune, Introduction to Discrete Event Systems, Second Edition, Springer Editore. Capitolo 3 (Supervisory Control);
BIBLIOGRAFIA DELLA LEZIONE
Recommended