
gewohnliche Differentialgleichungen
Prof. Dr. Volker Michel
Wintersemester 2008/09
-Vorlesungsmitschrift-getippt von Kathi Albus


Inhaltsverzeichnis
1 Grundlagen 51.1 Vorbemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Klassifikation gewohnlicher Differentialgleichungen . . . . . . . . . . . . . 51.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Grundlagen der Funktionalanalysis . . . . . . . . . . . . . . . . . . . . . . 10
2 Gewohnliche Differentialgleichungen 1. Ordnung 132.1 Existenz und Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Lineare gew. Dgl. 1. Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . 202.3 Exakte Differentialgleichungen . . . . . . . . . . . . . . . . . . . . . . . . 232.4 separierbare Differentialgleichungen . . . . . . . . . . . . . . . . . . . . . . 332.5 Explizit vs. implizit und Geometrisches . . . . . . . . . . . . . . . . . . . 362.6 Die Bernoulli’sche Differentialgleichung . . . . . . . . . . . . . . . . . . . . 422.7 Die Riccati’sche Differentialgleichung . . . . . . . . . . . . . . . . . . . . . 452.8 Abhangigkeitssatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizien-ten 513.1 Ordnung 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.2 n-te Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.3 Laplacetransformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten 734.1 Generelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.2 Die Euler’sche Differentialgleichung . . . . . . . . . . . . . . . . . . . . . . 754.3 Potenzreihenansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.4 Die Bessel’sche Differentialgleichung . . . . . . . . . . . . . . . . . . . . . 814.5 Die Sturm’sche Randwertaufgabe . . . . . . . . . . . . . . . . . . . . . . . 88
5 Systeme von Differentialgleichungen 935.1 Lineare Gleichungen mit konstanten Koeffizienten . . . . . . . . . . . . . . 935.2 Lineare Gleichungen mit variablen Koeffizienten . . . . . . . . . . . . . . . 965.3 allgemeine Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
6 Stabilitat 1036.1 Das Rauber-Beute-Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . 1036.2 Definitionen und Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . 1086.3 Lineare Systeme mit konstanten Koeffizienten . . . . . . . . . . . . . . . . 1096.4 Ljapunoff-Theorie (ein Einblick) . . . . . . . . . . . . . . . . . . . . . . . 111
Bibliographie 115
3

Inhaltsverzeichnis
4

1 Grundlagen
1.1 Vorbemerkungen
N: Menge aller positiven ganzen ZahlenN0 := N ∪ {0}C(k)(D,Rm): Menge aller k-fach stetig differenzierbaren Funktionen F : D → Rm,D ⊂ Rn, k ∈ N0 ∪ {∞}C(k)(D) := C(k)(D,R), C := C(0) (stetige Funktionen), C(k)[a, b] := C(k) ([a, b])
1.2 Klassifikation gewohnlicher Differentialgleichungen
zunachst: Eine Differentialgleichung (Dgl.) ist eine Gleichung, deren Unbekannte eineFunktion ist, wobei in der Gleichung mindestens eine Ableitung der unbekannten Funk-tion auftaucht.
Beispiel: y′ + y2 = 0 ist eine Dgl.y(a+ b) = y(a) · y(b) ist eine Funktionalgleichung (Lsg: y(x) = ex)
Hangt die gesuchte Fkt. von nur einer Veranderlichen ab (univariate Funktion), so sprichtman von einer gewohnlichen Dgl. (ODE), ansonsten (multivariate Funktion) von einerpartiellen Dgl. (PDE).
Eine gew. Dgl. hat allgemein die Form
F (x, y, y′, . . . , y(n)) = 0
wobei F : D → Rm, D ⊂ Rn+2, eine gegebene Funktion ist.Im Beispiel: y′′′ + y2 = cosx ware somit
F (a1, . . . , a5) = − cos a1 + a22 + a5
Beachte: Statt der prazisen Schreibweise
y′′′(x) + y2(x) = cosx
verwendet man ublicherweise die ubersichtlichere Form
y′′′ + y2 = cosx
Gew. Dgl. werden wie folgt kategorisiert:
• OrdnungDie Ordnung einer gew. Dgl. ist die hochste Ableitungsordnung, die in der Glei-chung auftaucht. Die Gleichung
y′′′ + y2 = cosx
hat also die Ordnung 3.
5

1 Grundlagen
• GleichungssystemeEin Gleichungssystem liegt vor, wenn F mindestens in den R2 abbildet, also meh-rere Gleichungen vorliegen.
• explizit/implizitEine gew. Dgl. n-ter Ordnung ist explizit, wenn es eine Funktion F gibt, so dass
0 = F (x, y, . . . , y(n))⇔ 0 = y(n) + F (x, y, . . . , y(n−1))
d.h. die Gleichung ist nach der hochsten Ableitungsordnung auflosbar.Ansonsten heißt sie implizit.
• linear/nicht-linearEine gew. Dgl. n-ter Ordnung ist linear, wenn F linear in y, y′, . . . , y(n) ist, ansons-ten nicht-linear.
• homogen/inhomogenEine gew. Dgl. ist homogen, wenn F nicht von x abhangt, d.h. wenn gilt:
∃ F : F (x, y, . . . , y(n)) = F (y, . . . , y(n))
Beispiel: y′′′ + y2 = cosx inhomogeny′′′ + y2 = 0 homogen√xy′′′ + y2 = 0 inhomogen
(vgl. homogene/inhomogene LGS)
Steht die Variable fur die Zeit, so wird oft der Begriff ”autonom“ (zeitunabhg.)statt ”homogen“ verwendet.
1.3 Beispiele
Beispiel 1.3.1
y′ = g g ∈ C[a, b] gegeben.
Explizite, lineare, inhomogene (g 6≡ 0) gew. Dgl. 1. Ordnung.
alle Losungen: y(x) =∫ x
ag(t)dt+ γ, γ ∈ R bel. Konstante
Was ist mit γ? γ = y(a)
Anfangswertproblem (AWP): y′ = g, y(a) = 2
⇒ ∃! Losung: y(x) =∫ x
ag(t)dt+ 2
Endwertproblem (EWP): y′ = g, y(b) = π
⇒ ∃! Losung: y(x) = −∫ b
xg(t)dt+ π
Beispiel 1.3.2
y′′ = g g ∈ C[a, b] gegeben.
6

1.3 Beispiele
Explizite, lineare, inhomogene (g 6≡ 0), gew. Dgl. 2. Ordnung.
⇒ y′(x) =∫ x
ag(t)dt+ γ
⇒ y(x) =∫ x
a
(∫ τ
ag(t)dt+ γ
)dτ + δ
=∫ x
a
∫ τ
ag(t)dtdτ + γ(x− a) + δ
γ, δ ∈ R bel. Konstanten (Freiheitsgrade).
Wie bekommt man das eindeutig?
AWP: y′′ = g, y′(a) = c, y(a) = d
⇒ y′(x) =∫ x
ag(t)dt+ y′(a)︸ ︷︷ ︸
=c!=γ
⇒ y(x) =∫ x
a
∫ τ
ag(t)dtdτ + c(x− a) + δ
⇒ y(a) = δ
⇒ y(x) =∫ x
a
∫ τ
ag(t)dtdτ + c(x− a) + d
EWP: y′′ = g, y′(b) = c, y(b) = d
analog.
Randwertproblem(RWP): y′′ = g, y(a) = c, y(b) = d
siehe oben: y(x) =∫ x
a
∫ τ
ag(t)dtdτ + γ(x− a) + δ ⇒ y(a) = δ ⇒ δ = c
y(b) =∫ b
a
∫ τ
ag(t)dtdτ + γ(b− a) + c
!= d
⇒ γ = (b− a)−1
(d−
∫ b
a
∫ τ
ag(t)dtdτ − c
)Beispiel 1.3.3 (Wachstums-(γ > 0)/Zerfallsgleichung(γ < 0))
y′ = γy γ ∈ R fest
Explizite, lineare, homogene gew. Dgl. 1. Ordnung.
Losung: y(x) = ceγx, c ∈ R bel. Konst., c = y(0)
Beispiel 1.3.4 (Schwingungsgleichung - ungedampft -)
y′′ + γ2y = 0 (γ ∈ R konst.)
Explizite, lineare, homogene gew. Dgl. 2. Ordnung.
Losung: z.B. y(x) = ceiγx, y(x) = c sin (γx), y(x) = c cos (γx) (c ∈ R Freiheitsgrad)
7

1 Grundlagen
Beispiel 1.3.5 (Newton’sches Gesetz (fur eine Punktmasse))
mx = f(x(t))t 7→ x(t) Bahn der Punktmassem: Masse, f : Kraftfeld
Explizite, homogene (autonome) gewohnliche Differentialgleichung 2. Ordnung. (nur li-near, wenn f linear)
Beispiel 1.3.6y′ = f(x)g(y)
Explizite, i.d.R. inhomogene gew. Dgl. 1. Ordnung mit getrennten Variablen.
Ansatz: (mathematisch unsauber aber wirkungsvoll)
dy
dx= f(x)g(y)
(Alles mit y auf die eine, alles mit x auf die andere Seite)
1g(y)
dy = f(x)dx
∫1
g(y)dy =
∫f(x)dx
Beispiel: y′ = x2y,dy
dx= x2y,
1ydy = x2dx,
∫1ydy =
∫x2dx
⇒ log |y| = 13x3 + c
⇒ y(x) = ±e13x3+c
⇒ y(x) = ±γe13x3, γ ∈ R konst. (uber die Anfangsbedingung bestimmen)
Probe: (Wichtig, da mathematisch unsauberer Weg!)
y′(x) = ±γe13x3 · 3
3x2 = x2
(±γe
13x3)
︸ ︷︷ ︸y(x)
Beispiel 1.3.7 (Riccati’sche Differentialgleichung (→ Kontrolltheorie))y′ = f(x)y2 + g(x)y + h(x)
Explizite, nicht-lineare, inhomogene (wenn h 6≡ 0 und f 6≡ 0) gew. Dgl. 1. Ordnung.
z.B. y′ = y2 + 1, [a, b] = [0, 2], y(0) = 0
dy
dx= y2(x) + 1,
1y2 + 1
dy = 1dx
∫1
y2 + 1dy =
∫1dx⇒ arctan y = x+ γ, γ ∈ R konst.
⇒ y(x) = tan (x+ γ︸︷︷︸Phase
), γ ∈ R
8

1.3 Beispiele
Aus y(0) = 0 folgt z.B. γ = 0 (y(0) = tan (0) = 0)(nicht eindeutig wegen der Periodizitat)Probe: y′(x) = 1 + tan2(x+ γ) = 1 + y2(x)Aber(!) die Losung existiert nicht auf dem ganzen Intervall [0, 2].
Kleine Variation: y′ = y2 − 1
dy
dx= y2 − 1,
∫1
y2 − 1dy =
∫1dx
⇒ artanh y = x+ γ
⇒ y(x) = tanh(x+ γ) =sinh(x+ γ)cosh(x+ γ)
Anmerkung: cosh auf ganz R definiert, keine Singularitat. Daher globale Losung.
Probe: tanh′ =(
sinhcosh
)′=
sinh2− cosh2
cosh2 = tanh2−1
Beispiel 1.3.8 (Sturm-Liouville-Problem (→ Seismologie, Thermodynamik, etc.))
RWP:d
dx
(p(x)
du
dx
)+ q(x)u+ λr(x)u = 0 (0 < p ∈ C(1))
α1u(a) + α2u′(a) = 0, β1u(b) + β2u
′(b) = 0
Inhomogene, lineare, explizite gew. Dgl. 2. Ordnung.
Frage u.a.: Fur welche λ gibt es nicht-triviale Losungen? → Eigenwertproblem
Beispiel 1.3.9 (Legendre’sche Differentialgleichung (→ spharische Analysis, elektromagne-tische Wellen))
(1− t2)u′′ − 2tu′ + λ(λ+ 1)u = 0
Inhomogene, lineare gew. Dgl. 2. Ordnung, nur explizit auf ]− 1, 1[ bzw. auf ]−∞,−1[oder ]1,+∞[.
Beispiel 1.3.10 (mathematischer Pendel)
ϕ = −gl
sinϕ
g: Fallbeschleunigung, l: Lange der Stange
Homogene, nicht-lineare, explizite gew. Dgl. 2. Ordnung.
Wir betrachten zwei extreme Falle, um die Nicht-Linearitat zu beseitigen:
9

1 Grundlagen
1) ϕ ≈ 0 (sehr kleine Auslenkungen, am Anfang)
⇒ sinϕ ≈ ϕ, denn limϕ→0
sinϕϕ
= 1
vereinfachte (linearisierte) Gleichung: ϕ = −glϕ
ϕ(t) = a sin(√
g
lt+ b
), Freiheitsgrade a, b ∈ R konst. (z.B. a aus ϕ(0) und b aus
ϕ(0) bestimmt)
2) ϕ ≈ π (sehr große Auslenkungen)
⇒ limϕ→π
sinϕπ − ϕ
= 1 (L’Hospital:cosϕ−1
→ϕ→π
1)
alternativ: Taylor
1) sinϕ = ϕ+O(ϕ3), ϕ→ 0
2) sinϕ = sinπ︸︷︷︸=0
+cosπ
1!(ϕ− π) +
− sinπ2!
(ϕ− π)2 +O((ϕ− π)3)
= −(ϕ− π) +O((ϕ− π)3) fur ϕ→ π
⇒ ϕ =g
lϕ− g
lπ mit positivem Faktor vor ϕ
vgl. ϕ = glϕ⇒ ϕ(t) = ae
√glt
mit konstantem Term komplizierter. (chaotisches Verhalten)
Wir mussen uns also folgende Fragen bei einer gew. Dgl. stellen:
• Existiert eine Losung?
• Wenn ja, ist sie eindeutig?
• Ist sie stabil?
• Wie bekommt man die Losung?
• Ist die Losung global?
1.4 Grundlagen der Funktionalanalysis
Defnition 1.4.1 Sei X ein K-Vektorraum (K ∈ {R,C}). Dann heißt || · || : X → R Norm,wenn gilt:
1. ||x|| ≥ 0 ∀x ∈ X, ||x|| = 0⇔ x = 0 (positive Definitheit)
2. ||λx|| = |λ| · ||x|| ∀λ ∈ K ∀x ∈ X (Homogenitat)
3. ||x+ y|| ≤ ||x||+ ||y|| ∀x, y ∈ X (Dreiecksungleichung)
In diesem Fall heißt (X, || · ||) normierter Raum.(Interpretation: Langenmessung)
Beispiel 1.4.2 a) C(K,Rm), K ⊂ Rn kompakt, mit
||f ||∞ := ||f ||C(K,Rm) := maxx∈K|f(x)|
10

1.4 Grundlagen der Funktionalanalysis
b) C(K,Rm) mit
||f ||p :=(∫
K|f(x)|p dx
) 1p
=: ||f ||Lp(K,Rm), 1 ≤ p <∞
c) Lp(D,Rm), D ⊂ Rn messbar, mit || · ||p
Lp(D,Rm) := {f : D → Rm messbar |∫D |f(x)|pdx < +∞} (1 ≤ p < +∞)
N p(D,Rm) := {f : D → Rm integrierbar |∫D |f(x)|pdx = 0}
Lp(D,Rm) := Lp(D,Rm)/N p(D,Rm) (Restklassenbildung)
d) (triviales Beispiel) Rn mit der euklidischen Norm
e) lp := {(an)n |∑∞
n=0 |an|p < +∞}, 1 ≤ p < +∞
‖(an)n‖ :=
( ∞∑n=0
|an|p) 1
p
Defnition 1.4.3 Sei (X, ‖ · ‖) ein normierter Raum und (an)n eine beliebige Folge in X.
a) (an) heißt (stark) konvergent gegen α ∈ X, wenn gilt
∀ε > 0 ∃n0 ∀n ≥ n0 : ‖an − α‖ < ε
b) (an) heißt Cauchy-Folge in X
:⇔ ∀ε > 0 ∃n0 ∀n,m ≥ n0 : ‖an − am‖ < ε
c) X heißt vollstandig, wenn jede Cauchy-Folge in X gegen ein Element von X kon-vergiert.Vollstandige normierte Raume nennt man Banachraume.
Beispiel 1.4.4 (vgl. Beispiel 1.4.2.)
• Banachraume:
(C(K,Rm), ‖ · ‖∞) , (Lp(D,Rm), ‖ · ‖p) , (Rn, | · |), (lp, ‖ · ‖p)
• nicht vollstandig(C(K,Rm), ‖ · ‖p)
Defnition 1.4.5 Sei (X, ‖ · ‖) ein normierter Raum und M ⊂ X eine beliebige Menge.M heißt
a) abgeschlossen :⇔M ⊃ {x ∈ X | ∀ε > 0 ∃y ∈M : 0 < ‖y − x‖ < ε}︸ ︷︷ ︸Haufungspunkte (HPe) von M
(M := M ∪ {HPe von M} abgeschlossene Hulle)
b) offen :⇔M = {x ∈ X | ∃ε > 0 : (‖y − x‖ < ε⇒ y ∈M)}︸ ︷︷ ︸=:int M=:M innere Punkte von M
{y ∈ X | ‖x− y‖ < ε} =: Uε(x) =: Nε(x) =: Kε(x) =: Bε(x)
11

1 Grundlagen
c) beschrankt :⇔ ∃c ∈ R : ‖x‖ < c ∀x ∈M
d) kompakt :⇔ Jede Folge in M besitzt eine gegen ein Element von M konvergenteTeilfolge.
e) relativ kompakt :⇔M kompakt
f) konvex :⇔ ∀x, y ∈M ∀λ ∈ [0, 1] : λx+ (1− λ)y ∈M
Satz 1.4.6 Sei (X, ‖ · ‖) ein normierter Raum. Dann gilt:Jede beschrankte und abgeschlossene Menge in X ist kompakt ⇔ dimX < +∞.
Satz 1.4.7 (Satz von Arzela-Ascoli)Sei K ⊂ Rn kompakt und M ⊂ C(K), wobei C(K) mit der Maximumnorm ‖ · ‖∞versehen ist. M ist genau dann relativ kompakt, wenn die folgenden beiden Eigenschaftenerfullt sind:
1. M ist beschrankt.
2. M ist gleichgradig stetig (equicontinuous), d.h.
∀ε > 0 ∃δ > 0 : (|x− y| < δ ⇒ |f(x)− f(y)| < ε) ∀f ∈M
Defnition 1.4.8 Seien (X, ‖ · ‖X) und (Y, ‖ · ‖Y ) normierte Raume und A : X → Y einlinearer Operator (Abbildung). A heißt
a) stetig :⇔ wenn xn → ξ in X, dann Axn → Aξ in Y .
b) beschrankt :⇔ ‖A‖ := supx∈Xx 6=0
‖Ax‖Y‖x‖X
= supx∈X‖x‖X=1
‖Ax‖Y < +∞
c) kompakt :⇔ AU ist relativ kompakt in Y , wobeiU := {x ∈ X | ‖x‖X ≤ 1} (abgeschlossene Einheitskugel)
⇔ ∀ beschr. Folgen (xn) in X besitzt (Axn) eine in Y konvergente Teilfolge
Defnition 1.4.9 (X, ‖ · ‖X), (Y, ‖ · ‖Y ) normierte Raume. Ein Operator A : X → Y(nicht zwingend linear) heißt kompakt, wenn fur jede beschrankte Folge (xn) ⊂ X dieFolge (Axn) eine beschrankte Teilfolge besitzt.
Satz 1.4.10 (X, ‖ · ‖X), (Y, ‖ · ‖Y ) normierte Raume, A : X → Y linear. Es gilt:
A kompakt ⇒ A stetig ⇔ A beschrankt
Satz 1.4.11 (Schauder’scher Fixpunktsatz)(X, ‖ · ‖) Banachraum, M ⊂ X nicht-leer, beschrankt, abgeschlossen, konvex.
A : M →M kompakt⇔ A besitzt einen Fixpunkt, d.h. ein x ∈M mit Ax = x
12

2 Gewohnliche Differentialgleichungen 1. Ordnung
2.1 Existenz und Eindeutigkeit
Wir betrachten das folgende AWP:
y′ = f(x, y), y(x0) = y0 (AWP1)
Satz 2.1.1 (Satz von Peano)
f : [x0 − a, x0 + a]× [y0 − b, y0 + b]︸ ︷︷ ︸=:R
→ R
mit x0, y0 ∈ R, a, b > 0 sei stetig.Sei M := max
(x,y)∈R|f(x, y)| und α := min(a, b
M ) (wenn f 6≡ 0).
⇒ Auf J := [x0 − α, x0 + α] existiert mindestens eine Losung von (AWP1).
Beweis. 1. Umformulierung von (AWP1) in ein Fixpunktproblem:Es gilt:
y′(x) = f(x, y(x)) ∀x ∈ J, y(x0) = y0, y diff’bar
⇔ y(x) = y0 +∫ x
x0
f(t, y(t))dt︸ ︷︷ ︸=:(Ay)(x)︸ ︷︷ ︸
Integralgleichung
∀x ∈ J, y stetig
(y lost (AWP1)⇔ y ist Fixpunkt von A)
Beweis ⇔ Hauptsatz der Differential- und Integralrechnung (HDI).
Fur A wahlen wir den Definitionsbereich
K := {y ∈ C(J) | |y(x)− y0| ≤ b︸ ︷︷ ︸⇔y(x)∈Kb(y0)
∀x ∈ J}
= {y ∈ C(J) | ‖y − y0‖C(J) ≤ b}
Ziel: Wende den Schauder’schen Fixpunktsatz an. Dafur ist zu zeigen:
• A(K) ⊂ K (Selbstabbildung), d.h. A : K → K
• K 6= ∅
• K beschrankt
• K abgeschlossen
• K konvex
13

2 Gewohnliche Differentialgleichungen 1. Ordnung
• A kompakt
2. A(K) ⊂ K: Sei y ∈ K, d.h. |y(x)− y0| ≤ b ∀x ∈ J .z.z. Ay ∈ K, d.h. |(Ay)(x)− y0| ≤ b ∀x ∈ JEs gilt:
|(Ay)(x)− y0| =∣∣∣∣∫ x
x0
f(t, y(t))dt∣∣∣∣ ≤
∣∣∣∣∣∣∣∫ x
x0
|f(t, y(t))|︸ ︷︷ ︸≤M
dt
∣∣∣∣∣∣∣≤M ·
∣∣∣∣∫ x
x0
1 dt∣∣∣∣ ≤M · |x− x0| ≤M · α︸︷︷︸
≤ bM
≤ b
((t, y(t)) ∈ R wg. Integrationsbereich und da y ∈ K)
3. K 6= ∅ trivial, da z.B. y ≡ y0 ∈ K
4. K beschrankt: Fur alle y ∈ K gilt:
‖y‖C(J) = maxx∈J|y(x)| = max
x∈J|y(x)− y0 + y0| ≤ max
x∈J|y(x)− y0|+ |y0| ≤ b+ |y0|
5. K abgeschlossen: Sei y Haufungspunkt (HP) von K. Dann gilt:∀ε > 0 ∃yε ∈ K, yε 6= y, so dass
‖y − yε‖C(J) < ε (*)
Angenommen, es existiert ξ ∈ J , so dass
|y(ξ)− y0|︸ ︷︷ ︸=:d
> b (⇔ y 6= K)
Fur alle y ∈ K ist:
‖y − y‖C(J) ≥ |y(ξ)− y(ξ)| ≥ d− b > 0
Wahle z.B. ε = d−b2 ⇒ Widerspruch zu (*).
Also: y ∈ K ⇒ K abgeschlossen.
6. K konvex: Seien y, z ∈ K und λ ∈ [0, 1]. Dann ist fur x ∈ J :
|λy(x) + (1− λ)z(x)− y0|= |λy(x) + (1− λ)z(x)− (λy0 + (1− λ)y0)|≤ λ|y(x)− y0|+ (1− λ)|z(x)− y0|≤ λb+ (1− λ)b = b
⇒ λy + (1− λ)z ∈ K
7. K kompakt: z.z.: Fur alle beschr. Folgen (xn) ⊂ K hat (Axn) eine konvergenteTeilfolge in C(J).⇒ z.z.: AK relativ kompakt (jede Folge hat eine konvergente Teilfolge), da Kbeschrankt.Wir verwenden den Satz von Arzela-Ascoli:
14

2.1 Existenz und Eindeutigkeit
7.1) AK ist beschrankt, da AK ⊂ K und K beschrankt ist (s. 4)
7.2) AK ist gleichgradig stetig:Sei y ∈ K bel. (⇒ Ay ∈ AK bel.) und x1, x2 ∈ J .Dann gilt:
|(Ay)(x1)− (Ay)(x2)|
=∣∣∣∣∫ x1
x0
f(t, y(t)) dt−∫ x2
x0
f(t, y(t)) dt∣∣∣∣
=∣∣∣∣∫ x1
x2
f(t, y(t)) dt∣∣∣∣
≤∣∣∣∣∫ x1
x2
|f(t, y(t))| dt∣∣∣∣
≤∣∣∣∣∫ x1
x2
M dt
∣∣∣∣=M |x1 − x2|
Somit: Zu ε > 0 wahle δ(ε) = εM . Dann gilt:
|x1 − x2| < δ ⇒ |(Ay)(x1)− (Ay)(x2)| ≤M |x1 − x2| ≤Mδ = ε ∀y ∈ K
(d.h. ∀Ay ∈ AK).Arzela-=⇒Ascoli
AK relativ kompakt ⇒ A kompakt.
Schauder=⇒ A besitzt einen Fixpunkt ⇔ (AWP1) hat eine Losung.
Korollar 2.1.2 f : [c, d]× R→ R sei stetig und beschrankt. Dann gilt:Auf ganz [c, d] existiert eine Losung von (AWP1) mit beliebig gewahlten x0 ∈ [c, d] undy0 ∈ R.
Beweis. Variation des vorherigen Beweises (s.U1).
Satz 2.1.3 (Fixpunktsatz von Weissinger) (X, ‖ · ‖) Banachraum, M ⊂ X nicht-leer undabgeschlossen,
∑n αn konvergente Reihe positiver Zahlen, A : M →M Abbildung mit
‖Anx−Any‖ ≤ αn‖x− y‖ ∀x, y ∈M ∀n ∈ N
⇒ A hat genau einen Fixpunkt ξ.Dieser ist Limes der Iterationsfolge (Anx0)n mit bel. Startwert x0 ∈ M . Es gilt dieFehlerabschatzung
‖ ξ −Anx0‖ ≤
( ∞∑k=n
αk
)‖Ax0 − x0‖
(vgl. Banach’scher Fixpunktsatz)
Beweis. Setze xn := Anx0.
1. (xn) ist eine Cauchy-Folge:
‖xn+1 − xn‖ = ‖An+1x0 −Anx0‖ = ‖Anx1 −Anx0‖Vor.≤ αn‖x1 − x0‖ (*)
15

2 Gewohnliche Differentialgleichungen 1. Ordnung
k∈N=⇒ ‖xn+k − xn‖ ≤ ‖xn+k − xn+k−1‖+ ‖xn+k−1 − xn+k−2‖+ . . .+ ‖xn+1 + xn‖
=n+k−1∑j=n
‖xj+1 − xj‖(∗)≤
n+k−1∑j=n
αj‖x1 − x0‖ (**)
n+k−1∑j=n
αjαj>0
≤∞∑j=n
αj →(n→∞)
0 Restglied der konvergenten Reihe∑
j aj
⇒ ∀ε > 0 ∃n0 ∀n,m ≥ n0 : ‖xm − xn‖ ≤ ε⇒ (xn) Cauchy-Folge
2. (xn) konvergiert:X Banachraum, M ⊂ X abgeschlossen⇒M vollstandig⇒ (xn) konvergiert gegenein Element von M .Sei ξ := limxn (Beachte, dass die Folge in M bleibt, da A eine Selbstabbildungist: A : M →M).
3. ξ ist ein Fixpunkt von A:
‖xn+1 −Aξ‖ = ‖Axn −Aξ‖Vor.≤ α1‖xn − ξ‖ →
(n→∞)0 (da xn → ξ)
⇒ xn+1 → Aξ
Da die Grenzwerte eindeutig sind, muss ξ = Aξ gelten.
4. Fehlerabschatzung:limk→∞
in (**):
‖ξ − xn︸︷︷︸Anx0
‖ ≤
∞∑j=n
αj
‖ x1︸︷︷︸Ax0
−x0‖
5. Eindeutigkeit des Fixpunktes:Sei η ∈M mit Aη = η. Dann gilt:
‖ξ− η‖ = ‖Aξ−Aη‖ = ‖A2ξ−A2η‖ = . . . = ‖Anξ−Anη‖Vor.≤ αn‖ξ− η‖ ∀n ∈ N
αn → 0 (n→∞)
⇒ ‖ξ − η‖ ≤ 0⇒ ‖ξ − η‖ = 0⇒ ξ = η
Satz 2.1.4 (Picard-Lindelof) Sei R := [x0−a, x0 +a]× [y0−b, y0 +b]; x0, y0 ∈ R, a, b > 0gegeben und f stetig in (x, y) und Lipschitzsch in y, d.h.
∃L > 0 : |f(x, y1)− f(x, y2)| ≤ L|y1 − y2| ∀(x, y1), (x, y2) ∈ R
Dann hat (AWP1) genau eine Losung y auf J := [x0−α, x0+α], wobei α := min(a, b‖f‖C(R)
).Diese Losung y ist gleichmaßiger Limes (also ‖ · ‖∞-Limes) der Iterationsfolge (ϕn) mit
ϕn(x) := y0 +∫ x
x0
f(t, ϕn−1(t))dt, n ∈ N, x ∈ J
16

2.1 Existenz und Eindeutigkeit
ϕ0 ∈ {u ∈ C(J) | |u(x)− y0| ≤ b ∀x ∈ J} =: M
Es gelten die Fehlerabschatzungen:
|y(x)− ϕn(x)| ≤
( ∞∑k=n
(αL)k
k!
)‖ϕ1 − ϕ0‖C(J),
|y(x)− ϕn(x)| ≤ (αL)n
n!eαL‖ϕ1 − ϕ0‖C(J)
∀x ∈ J ∀n ∈ N0.
Beweis. → Weissinger’scher FixpunktsatzSiehe Beweis des Satzes von Peano:
y′ = f(x, y), y(x0) = y0(auf J)
⇐⇒ y(x) = y0 +∫ x
x0
f(t, y(t))dt︸ ︷︷ ︸=:(Ay)(x)
∀x ∈ J
d.h. zu zeigen ist:
• A hat genau einen Fixpunkt y
• Dieser ist Limes der Iterationsfolge
ϕn := Aϕn−1, ϕ0 ∈M bel.
• Fehlerabschatzungen
Weissinger: X = C(J) BanachraumM ⊂ C(J) nicht-leer, abgeschlossen (abgeschlossene Kugel in C(J)mit Radius b um die konstante Funktion y0)A : M →M Selbstabbildung (klar; siehe Beweis des Satzes von Peano)
Abschatzung fur ‖Anu−Anv‖ benotigt (u, v ∈M).zunachst: |(Anu)(x)− (Anv)(x)| ≤ ?
|(Au)(x)− (Av)(x)| Def=von A
∣∣∣∣∫ x
x0
f(t, u(t))− f(t, v(t))dt∣∣∣∣
≤
∣∣∣∣∣∣∣∫ x
x0
| . . . |︸︷︷︸≤L|u(t)−v(t)|
dt
∣∣∣∣∣∣∣ ≤ L∣∣∣∣∣∣∣∫ x
x0
|u(t)− v(t)|︸ ︷︷ ︸≤‖u−v‖C(J)
dt
∣∣∣∣∣∣∣ ≤ L‖u− v‖C(J) · |x− x0|
⇒|(A2u)(x)− (A2v)(x)| =∣∣∣∣∫ x
x0
f(t, (Au)(t))− f(t, (Av)(t))dt∣∣∣∣
≤ L∣∣∣∣∫ x
x0
|(Au)(t)− (Av)(t)|dt∣∣∣∣ ≤ L ∣∣∣∣∫ x
x0
L‖u− v‖C(J)|t− x0|dt∣∣∣∣
= L2‖u− v‖C(J)
∣∣∣∣∫ x
x0
|t− x0|dt∣∣∣∣ = L2‖u− v‖C(J)
|x− x0|2
2
Behauptung: |(Anu)(t)− (Anv)(t)| ≤ Ln‖u− v‖C(J)|x− x0|n
n!∀n ∈ N0
17

2 Gewohnliche Differentialgleichungen 1. Ordnung
Induktion: n = 0 trivial, n = 1 und n = 2 s.o.n→ n+ 1:
|(An+1u)(x)− (An+1v)(x)|
=∣∣∣∣∫ x
x0
f(t, (Anu)(t))− f(t, (Anv)(t))dt∣∣∣∣
≤L∣∣∣∣∫ x
x0
|(Anu)(t)− (Anv)(t)|dt∣∣∣∣
I.V.≤ L
∣∣∣∣∫ x
x0
Ln‖u− v‖C(J)|t− x0|n
n!dt
∣∣∣∣=Ln+1‖u− v‖C(J)
∣∣∣∣∫ x
x0
|t− x0|n
n!dt
∣∣∣∣︸ ︷︷ ︸=|x− x0|n+1
(n+ 1)n!
=⇒ ‖Anu−Anv‖C(J) ≤ Ln‖u− v‖C(J)αn
n!
=⇒ αn =Lnαn
n!,
∞∑n=0
(αL)n
n!= eαL < +∞ konvergent
Weissinger=⇒ A hat genau einen Fixpunkt y,
y = limϕn, ϕn = Aϕn−1, ϕ0 ∈M bel.
wobei ‖y − ϕn‖C(J) ≤
( ∞∑k=n
Lkαk
k!
)‖Aϕ0︸︷︷︸
ϕ1
−ϕ0‖C(J)
∞∑k=n
Lkαk
k!=∞∑k=0
(Lα)k+n
(k + n)!= (Lα)n
∞∑k=0
(Lα)k
(k + n)!≤ (Lα)n
n!
∞∑k=0
(Lα)k
k!=
(Lα)n
n!eLα
mit (k + n)! = (k + n)︸ ︷︷ ︸≥n
. . . (k + 1)︸ ︷︷ ︸≥1
k! ≥ n!k!
Bemerkung 2.1.5 Da die Lipschitzbed. oft schwer nachzuweisen ist, sei nochmal anfolgendes erinnert:Ist f : [a, b]× [c, d]→ R stetig diff’bar bzgl. y, dann ist f Lipschitzsch bzgl. y.
Beweis. Seien y, η ∈ [c, d] bel. und x ∈ [a, b] bel. aber fest.
⇒ |f(x, y)− f(x, η)| MWS=∃z∈]c,d[
∣∣∣∣∂f∂y (x, z)∣∣∣∣ · |y − η| ≤ ∥∥∥∥∂f∂y
∥∥∥∥C([a,b]×[c,d])
· |y − η|
∂f∂y stetig auf dem Kompaktum [a, b]× [c, d]
Also z.B. L :=∥∥∥∂f∂y∥∥∥∞
Beispiel 2.1.6 a) y = y′, y(0) = 1, d.h. f(x, y) = y stetig in (x, y) und Lipschitzschin y.z.B. ϕ0 ≡ 1. (a und b bel. groß)
ϕ1(x) = (Aϕ0)(x) = 1 +∫ x
0f(t, ϕ0(t))dt = 1 +
∫ x
0ϕ0(t)dt = 1 +
∫ x
01 dt = 1 + x
18

2.1 Existenz und Eindeutigkeit
allgemein ϕn(x) = 1 +∫ x
0f(t, ϕn−1(t)) = 1 +
∫ x
0ϕn−1(t)dt
ϕ2(x) = 1 +∫ x
01 + t dt = 1 + x+
x2
2,
ϕ3(x) = 1 +∫ x
01 + t+
t2
2dt = 1 + x+
x2
2+x3
6
Vermutung: ϕn(x) =n∑k=0
xk
k!
Beweis. (durch vollstandige Induktion): n = 0, 1, 2 s.o.n→ n+ 1
ϕn+1(x) = 1 +∫ x
0ϕn(t)dt I.V.= 1 +
∫ x
0
n∑k=0
tk
k!dt = 1 +
n∑k=0
1k!
∫ x
0tkdt
=1 +n∑k=0
1k!xk+1
k + 1= 1 +
n+1∑k=1
xk
k!=
n+1∑k=0
xk
k!
ϕn(x) −→(n→∞)
∞∑k=0
xk
k!= ex gleichmaßig auf jedem Intervall [−α, α].
(allgemein: glm. auf jedem Intervall [A,B] ⊂ R, siehe Analysis)
Vergleiche mit anderem Anfangswert:ϕ0 = sin(x)
ϕ1(x) = 1 +∫ x
0sin t dt = 1 + (− cos t)
∣∣∣∣x0
= 1− cosx+ cos 0 = 2− cosx
ϕ2(x) = 1 +∫ x
02− cos t dt = 1 + (2t− sin t)
∣∣∣∣x0
= 1 + 2x− sinx
ϕ3(x) = 1 +∫ x
01 + 2t− sin t dt = 1 + (t+ t2 + cos t)
∣∣∣∣x0
= 1 + x+ x2 + cosx− 1
= x+ x2 + cosx
ϕ4(x) = 1 +∫ x
0t+ t2 + cos t dt = 1 +
(t2
2+t3
3+ sin t
)∣∣∣∣x0
= 1 +x2
2+x3
3+ sinx
ϕ5(x) = 1 +∫ x
01 +
t2
2+t3
3+ sin t dt = 1 +
(t+
t3
6+t4
12− cos t
)∣∣∣∣x0
= 1 + x+x3
6+x4
12− cosx+ 1 = 2− cosx+ x+
x3
6+x4
12...Trotzdem gilt ϕn →
n→∞exp. Hieran sieht man, wie wichtig die geschickte Wahl der
Anfangsnaherung ist.
b) y′ =√y, y(0) = 0, erfullt nicht die Vor. → s. U1, A4
c) y′ = xy2, y(0) = 1ϕ0 ≡ 1
ϕ1(x) = y0 +∫ x
0f(t, ϕ0(t))dt = 1 +
∫ x
0tϕ2
0(t)dt = 1 +∫ x
0t dt = 1 +
x2
2
19

2 Gewohnliche Differentialgleichungen 1. Ordnung
‖ϕ1 − ϕ0‖ = maxx∈J
∣∣∣∣x2
2
∣∣∣∣, z.B. J = [−1, 1]:
‖ϕ1 − ϕ0‖C[−1,1] =12
ϕ2(x) = 1 +∫ x
0t
(1 +
t2
2
)2
dt = 1 +∫ x
0t+ t3 +
t5
4dt = 1 +
x2
2+x4
4+x6
24...
Satz 2.1.7 f : [c, d]×R→ R sei stetig in (x, y) und Lipschitzsch in y. Dann hat (AWP1)mit beliebig vorgegebenem x0 ∈ [c, d] und y0 ∈ R genau eine Losung, die auf ganz [c, d]existiert.Fur diese Losung gelten die gleiche Konvergenzaussage (auf [c, d]) und die analoge Feh-lerabschatzung wie im Satz von Picard-Lindelof, wobei α = max{x0 − c, d− x0}.
2.2 Lineare gew. Dgl. 1. Ordnung
Wir betrachten die folgende Gleichung
y′ = α(x) · y + s(x) (L1)
(als AWP: y′ = α(x)y + s(x), y(x0) = y0)
s: Inhomogenitat, Storfunktion
D.h. f(x, y) = α(x)y + s(x) stetig in (x, y) ⇐⇒ α und s stetig. Lipschitzsch in y (aufjedem Intervall, wo α stetig ist).⇒ Das zugehorige AWP ist stets eindeutig losbar, wenn α und s stetig sind.
Fixpunktiteration ϕ0 = y0
ϕ1(x) = y0 +∫ x
x0
α(t)y0 + s(t)dt usw.
zunachst der homogene Fall: s ≡ 0.
ϕ1(x) = y0 +∫ x
x0
α(t)y0dt = y0 + y0
∫ x
x0
α(t)dt
ϕ2(x) = y0 +∫ x
x0
α(t)ϕ1(t)dt = y0 +∫ x
x0
α(t) y0
(1 +
∫ t
x0
α(τ)dτ)
︸ ︷︷ ︸=ϕ1(t)
dt
= y0
(1 +
∫ x
x0
α(t)dt+∫ x
x0
∫ t
x0
α(τ)dτ dt)
Dies erscheint wenig erfolgversprechend.
Satz 2.2.1 Sei α stetig auf dem Intervall I. Dann sind alle Losungen von (man sagt auch
”alle Integrale von“)y′ = α(x)y
gegeben durchy(x) = Ce
Rα(x)dx (*)
20

2.2 Lineare gew. Dgl. 1. Ordnung
(C bel. Konstante,∫α(x)dx: bel. Stammfkt. von α)
Das AWP y′ = α(x)y, y(x0) = y0 (x0 ∈ I, y0 ∈ R bel.) hat genau eine Losung. Sie istgegeben durch
y(x) = y0 exp(∫ x
x0
α(t)dt)
Beweis. 1. Konstante: Ist y Losung, so ist Cy Losung:
(Cy)′ = Cy′ = Cαy = α(Cy)
2. (*) ist eine Losung: Sei z(x) := eRα(x)dx (
∫α(x)dx existiert nach dem HDI, da α
stetig ist.)⇒ z′(x) = e
Rα(x)dx · α(x) = α(x)z(x)
⇒ z Losung1)⇒ Cz Losung
3. Alle Losungen sehen aus wie (*): Sei y Losung von y′ = α(x)y.Wir betrachten d
dxy(x)z(x) . (beachte: z 6= 0 auf ganz I.)
d
dx
y(x)z(x)
=y′z − yz′
z2=αyz − yαz
z2= 0 auf I
⇒ yz konstant ⇒ y = Cz, C ∈ R konstant.
4. AWP: ”∃!“siehe Picard-Lindelof
Formel: einsetzen y(x0) = y0 exp∫ x0
x0
α(t)dt = y0e0 = y0
Beispiel 2.2.2 a) y′ = αy, α ∈ R konst. y(x0) = y0.
y(x) = y0 exp∫ x
x0
αdt = y0eα(x−x0)
b) y′ = (sinx)︸ ︷︷ ︸=α(x)
y :
y(x) = C exp∫α(x)dx = C exp
∫sin(x)dx = Ce− cosx
oder: y(x) = C exp∫ x
x0
α(t)dt = C exp∫ x
x0
sin t dt = Ce− cosx+cosx0 = Ce− cosxecosx0
= Ce− cosx, wobei C ∈ R bel. Konstante.
Anfangsbed.: z.B. y(0) = 1
Formel: y(x) = 1 · e− cosx+cos 0 = e− cosx+1
oder die allgemeine Formel benutzen:
y(x) = Ce− cosx, y(0) = 1
⇒ Ce− cos 0 = 1
⇔ 1 = Ce−1
⇔ C = e
Somit: y(x) = e · e− cosx = e1−cosx
21

2 Gewohnliche Differentialgleichungen 1. Ordnung
Nun zum inhomogenen Fall
Satz 2.2.3 Sind α und s stetig auf dem Intervall I und yp eine spezielle (”partikulare“)Losung von (L1), so hat die allgemeine Losung von (L1) die Form
y︸︷︷︸allg. inh. Lsg.
= C exp∫α(x) dx︸ ︷︷ ︸
allg. homog. Lsg.
+ yp︸︷︷︸part. inh. Lsg.
Das zugehorige AWP hat genau eine Losung (vgl. lineare Gleichungssysteme).
Beweis. Sei y eine beliebige inhomogene Losung. So gilt:
(y − yp)′ = y′ − y′p = α(x)y + s(x)− (α(x)yp + s(x)) = α(x)(y − yp)homogene Gleichung
Satz⇐⇒2.2.1.
y − yp = C exp∫α(x) dx
⇐⇒ y = yp + C exp∫α(x) dx
(und umgekehrt: y = yp + C exp∫α(x) dx ist inhomogene Losung)
Die Frage ist: Wie erhalt man eine partikulare Losung?
Satz 2.2.4 (Methode der Variation der Konstanten) Seien α und s stetig im Intervall I.Setzt man
yp(x) = C(x) exp∫α(x) dx
mit dfzb. C in die inhomogene Gleichung (L1) ein, so liefert dies stets eine partikulareinhomogene Losung yp.
Beweis. Ansatz: y(x) = C(x) exp∫α(x) dx
Einsetzen in (L1) liefert:
y′(x) = C ′(x) exp(∫
α(x) dx)
+ C(x) exp(∫
α(x) dx)· α(x)
!= α(x) · C(x) exp(∫
α(x) dx)
+ s(x)
⇐⇒ C ′(x) exp∫α(x) dx = s(x)
⇐⇒ C ′(x) = s(x)︸︷︷︸stetig
exp(−∫α(x)︸︷︷︸stetig
dx)
︸ ︷︷ ︸stetig︸ ︷︷ ︸
stetig︸ ︷︷ ︸stetig
(HDI)⇐⇒ C(x) =∫s(x) exp
(−∫α(x) dx
)dx (stets existent)
22

2.3 Exakte Differentialgleichungen
Beispiel 2.2.5 y′ = y sinx+ sinx, y(0) = 0
1. Bestimme die allg. homogene Losung: (s.o.)
y′ = y sinx⇒ y(x) = CeR
sinx dx = Ce− cosx
2. Bestime eine partikulare Losung durch Variation der Konstanten:Ansatz: yp(x) = C(x)e− cosx
Einsetzen in y′p = αyp + s ergibt:
C ′(x)e− cosx + C(x)e− cosx sinx = C(x)e− cosx sinx+ sinx⇐⇒ C ′(x)e− cosx = sinx⇐⇒ C ′(x) = ecosx sinxz.B. C(x) = −ecosx
Also: yp(x) = −ecosx · e− cosx = −1
3. allgemeine inhomogene Losung:
y(x) = Ce− cosx − 1
4. Anfangswert:Es muss y(0) = 0 gelten, also
0 = Ce− cos 0 − 1 = Ce−1 − 1
⇐⇒ 1 = Ce−1
⇐⇒ C = e
also: y(x) = e · e− cosx − 1 = e1−cosx − 1 ist die Losung des AWP.
2.3 Exakte Differentialgleichungen
Beispiel 2.3.1 E : R2 → R2 2-dim. elektrisches FeldE = (E1, E2)Aus den Maxwell-Gleichungen wissen wir: Es existiert ein Potential U mit E = −grad U .Man nennt (zu festem c ∈ R) lC := {(x, y) ∈ R2 |U(x, y) = c} Aquipotentiallinie.
Angenommen lC lasst sich durch eine Gleichung y = y(x) oder x = x(y) stuckweiseexplizit darstellen.
23

2 Gewohnliche Differentialgleichungen 1. Ordnung
Auf diesen Stucken gilt: U(x, y(x)) = c ∀x bzw. U(x(y), y) = c ∀y.
Ableiten:∂U
∂x(x, y(x)) +
∂U
∂y(x, y(x)) · dy
dx= 0 ∀x bzw.
∂U
∂x(x(y), y) · dx
dy+∂U
∂y(x(y), y) = 0 ∀y
=⇒E=−grad U
Die Aqupotentiallinien x 7→ y(x) bzw. y 7→ x(y) erfullen
E1(x, y) + E2(x, y)dy
dx= 0 bzw.
E1(x, y)dx
dy+ E2(x, y) = 0
→ gew. Dgl. fur y(x) bzw. x(y) (implizit, 1. Ordnung)
Defnition 2.3.2 Ist F stetig dfzb. auf einem Rechteck R im R2 und ist eine bijektiveFunktion x 7→ y(x) (⇔ y 7→ x(y)) gesucht mit
∂F
∂x(x, y(x)) +
∂F
∂y(x, y(x))
dy
dx= 0,
∂F
∂x(x(y), y)
dx
dy+∂F
∂y(x(y), y) = 0,
so spricht man von einer exakten Differentialgleichung und schreibt kurz:
∂F
∂x(x, y) dx+
∂F
∂y(x, y) dy = 0 (ED)
(auch interpretierbar im Sinne von Differentialformen)
Satz 2.3.3 Sei F stetig dfzb. auf dem Rechteck R ⊂ R2. Dann gilt:
x 7→ y(x) ist eine Losung von (ED)⇐⇒ x 7→ F (x, y(x)) ist konstant
analog: y 7→ x(y) . . .⇐⇒ y 7→ F (x(y), y) . . .
Beweis. Sehen wir uns die zugehorige Gleichung genauer an. In diesem Fall (x 7→ y(x))gilt:
∂F
∂x(x, y(x)) +
∂F
∂y(x, y(x))
dy
dx︸ ︷︷ ︸= ddxF (x,y(x))
Also gilt: x 7→y(x) Lsg. von (ED)⇔ x 7→F (x,y(x)) konstant
= 0 ∀x
(y 7→ x(y) aus Symmetriegrunden analog.)
Dieser Satz liefert eine Losungsmethode: Finde dfzb. Losungen x 7→ y(x) vonF (x, y(x)) = const.
Beispiel 2.3.4 a) 2x sin y dx+ x2 cos y dy = 0, y(1) = π4
also ∂F∂x = 2x sin y, ∂F
∂y = x2 cos y. Wenn ein solches F existiert, dann ist die Dgl.exakt.
F (x, y) =∫
2x sin y dx = x2 sin y + C1(y)
24

2.3 Exakte Differentialgleichungen
F (x, y) =∫x2 cos y dy = x2 sin y + C2(x)
Hier: C1 = C2 = const.=⇒ F existiert und somit ist die Dgl. exakt., z.B.
F (x, y) = x2 sin y
Gleichung: F (x, y) = c, c ∈ R konst., also
x2 sin y = c
⇐⇒ sin y =c
x2(fur x 6= 0!)
⇐⇒y = arcsinc
x2
y(1) =π
4=⇒ π
4= arcsin
c
1=⇒ c = sin
π
4=√
22
=⇒ y(x) = arcsin√
22x2
Die Anfangsbedingung kann auch gleich eingesetzt werden:
x2 sin y = c
Mit y(1) =π
4: 12 sin
π
4=√
22
= c
Somit
x2 sin y =√
22⇐⇒ y(x) = arcsin
√2
2x2
Definitionsbereich? Folgende Rahmenbedingungen liegen vor:
• x0 = 1
• sin ist nicht auf ganz R invertierbar, sondern nur auf Stucken [2n−12 π, 2n+1
2 π] →[−1, 1], n ∈ Z.
• Division durch x in der Herleitung → Losung in Umgebung von x = 0 separatbetrachten, aber:y(1) = π
4 ∈ [−π2 ,
π2 ], also n = 0. (also y(x) ∈ [−π
2 ,π2 ])
und −1 ≤ cx2 ≤ 1, d.h.
−1 ≤√
22x2≤ 1⇐⇒ 2x2
√2≥ 1⇐⇒ x2 ≥ 1√
2
(d.h. Losung in der Umgebung von x = 0 irrelevant)Da x0 = 1 im Definitionsbereich sein muss, reicht es aus, den positiven Ast zubetrachten. Also gilt:
y(x) = arcsin
(√2
2x2
), x ≥ 2−
14
zur Erinnerung aus der Analysis (R ⊂ R2 Rechteck):
f ∈ C(1)(R,R2) hat eine Stammfunktion
⇐⇒ ∃F ∈ C(2)(R) :∂F
∂x= f1,
∂F
∂y= f2
⇐⇒ ∂f1
∂y︸︷︷︸= ∂2F∂y∂x
=∂f2
∂x︸︷︷︸= ∂2F∂x∂y
25

2 Gewohnliche Differentialgleichungen 1. Ordnung
(vgl. Satz von Schwarz), wobei der Teil ”⇐“ bei der letzten Aquivalenz nicht trivial ist.
Satz 2.3.5 Sei R ⊂ R2 ein Rechteck und seien P,Q ∈ C(1)(R). Dann ist die Dgl.
P (x, y)dx+Q(x, y)dy = 0
(Notation analog zu oben) genau dann exakt, wenn die Integrabilitatsbedingung
∂P
∂y=∂Q
∂x
auf R erfullt ist.
Beispiel 2.3.6 a) Bsp. 2.3.4. P (x, y) = 2x sin y, Q(x, y) = x2 cos y
∂P
∂y= 2x cos y,
∂Q
∂x= 2x cos y
b) 2xey︸︷︷︸=P (x,y)
dx+ (x2 + 1)ey︸ ︷︷ ︸=Q(x,y)
dy = 0, y(1) = 0
∂P
∂y= 2xey,
∂Q
∂x= 2xey
D.h. es existiert eine Stammfunktion. Suche diese Stammfunktion:
P =∂F
∂x=⇒ F (x, y) =
∫2xey dx = x2ey + C1(y)
Q =∂F
∂y=⇒ F (x, y) =
∫(x2 + 1)ey dy = (x2 + 1)ey + C2(x)
also: C2 = const, C1(y) = ey + C2
z.B. F (x, y) = (x2 + 1)ey != Cwegen y(1) = 0 ist (12 + 1)e0 = C, d.h. C = 2
Also (x2 + 1)ey = 2⇐⇒ ey =2
x2 + 1⇐⇒ y(x) = ln
2x2 + 1
Test: y(1) = ln2
12 + 1= ln 1 = 0,
2xey + (x2 + 1)eydy
dx= 2x
2x2 + 1
+ (x2 + 1)2
x2 + 1· x
2 + 12· 2 · 2x
(x2 + 1)2(−1)
=1
x2 + 1(4x− 4x) = 0
Noch eine Erinnerung an die Analysis: Es stellt sich die Frage, wann F (x, y) = c nach y auflosbar ist.
Eine Antwort liefert der Satz uber implizite Funktionen.
26

2.3 Exakte Differentialgleichungen
Satz 2.3.7 (ED) sei gegeben, R = Ix× Iy (Ix, Iy Intervalle). Existiert (x0, y0) ∈ R (x0 ∈Ix, y0 ∈ Iy) mit F (x0, y0) = c, ist F ∈ C(1) und ist ∂F
∂y 6= 0 in einer Umgebung von(x0, y0), so existiert eine Umgebung von x0, in der F (x, y) = c eindeutig in eine C(1)-Funktion x 7→ y(x) aufgelost werden kann, d.h. in einer hinreichend kleinen Umgebungvon (x0, y0) ist (ED) mit y(x0) = y0 stets eindeutig losbar.
Beispiel 2.3.8 Bsp. 2.3.4. F (x, y) = x2 sin y != c
∂F
∂y= x2 cos y 6= 0 fur y 6∈
{2n+ 1
2π
∣∣∣∣ n ∈ Z}
und x 6= 0
(vgl. obige Betrachtungen zur Auflosbarkeit)
Korollar 2.3.9 (ED) gegeben (R und (x0, y0) wie in Satz 2.3.7., aber x0 ∈ Ix, y0 ∈ Iy)mit Anfangsbedingungen x(y0) = x0, F ∈ C(1)(R).Ist ∂F
∂x 6= 0 in einer Umgebung von (x0, y0), so hat das betrachtete Anfangswertproblemin einer hinreichend kleinen Umgebung von y0 genau eine Losung y 7→ x(y). Diese erhaltman durch Auflosen von F (x, y) = F (x0, y0) nach x.(beachte die Symmetrie von x und y)
Beispiel 2.3.10 a) Bsp. 2.3.4. 2x sin y dx+ x2 cos y dy = 0, x(π4 ) = 1
x2 sin y = 12 sin(π
4
)=√
22
nach x auflosen:
⇐⇒ ±
√ √2
2 sin y= x
existiert nur, wenn sin y > 0, d.h. y ∈ ]2nπ, (2n+ 1)π[ (n ∈ Z) erforderlich.hier (y0 = π
4 ) : n = 0, y ∈ ]0, π[Wegen x0 = 1 nur positive Losung. Also:
x(y) = 2−14
1√sin y
fur y ∈ ]0, π[
⇐⇒p
sin y = 2−14
1
x(y)⇐⇒ sin y =
1√2· 1
x2⇐⇒ y(x) = arcsin
1√2x2
, wobei
y(x) ∈ ]0, π[ ⇐⇒ 1√2x2≤ 1⇐⇒ 1√
2≤ x2 ⇐⇒ 2−
14 ≤ x
b) (2xey − 1)︸ ︷︷ ︸P
dx+ (x2ey + 1)︸ ︷︷ ︸Q
dy = 0, y(1) = 0
∂P
∂y= 2xey,
∂Q
∂x= 2xey
D.h. es existiert eine Stammfunktion. Die Gleichung ist exakt. Ein Rechteck isthier z.B. R = R2.
F (x, y) =∫
2xey − 1 dx = x2ey − x+ C1(y)
=∫x2ey + 1 dy = x2ey + y + C2(x)
27

2 Gewohnliche Differentialgleichungen 1. Ordnung
=⇒ C1(y) = y + C, C2(x) = −x+ C
Damit ist F (x, y) = x2ey − x+ y Beispiel fur eine Stammfunktion.
Bestimmen der Losung: y(1) = 0, also F (1, 0) = 0.Gleichung: x2ey − x+ y = 0Auflosen nach y
∂F
∂y= x2ey + 1 6= 0
aber: Auflosung von x2ey − x+ y = 0 nach y praktisch analytisch nicht machbar.
Auflosen nach x:∂F
∂x= 2xey − 1
(= 0⇔ x =
e−y
2
)Außerhalb von x = 1
2e−y auflosbar nach x, auch praktisch:
x2ey − x+ y = 0
⇐⇒ x2 − xe−y + ye−y = 0
⇐⇒ x =e−y
2±√e−2y
4− e−yy =
12e−y
(1±
√1− 4eyy
)(Beachte: bei x = 1
2e−y ist gerade der Ubergang beider Varianten, wo auch lokal keine eindeutige
Auflosbarkeit vorliegt.)
Anfangsbedingung y(1) = 0 (also hier x(0) = 1) ergibt x = 12(1±
√1)
⇒ ”+ “-Variante benotigt.
Definitionsbereich? Es muss 1− 4eyy ≥ 0 gelten.⇒ Bestimme numerisch (z.B. mit dem Newton-Verfahren) die Losung η von 1 −4eηη = 0. Wegen der Monotonie von 1−4eyy ist der Radikand positiv fur alle y ≤ η.
Also: x(y) = 12e−y (1 +
√1− 4eyy
)∀y ≤ η(≈ 0,204)
Was macht man mit impliziten Dgl. der Form
P (x, y)dx+Q(x, y)dy = 0, (I1)
die nicht exakt sind?(wieder auf Rechtecken R ⊂ R2)
Nach Satz 2.3.5. muss ∂P∂y = ∂Q
∂x auf R gelten.Idee: Gibt es eine aquivalente Form zu (I1), die exakt ist?Ansatz: Ist M ∈ C(1)(R) mit M(x, y) 6= 0 ∀(x, y) ∈ R, so ist
(I1) ⇐⇒M(x, y)P (x, y)dx+M(x, y)Q(x, y)dy = 0 (∗)
Findet man ein M , so dass die Integrabilitatsbedingung
∂(MP )∂y
=∂(MQ)∂x
28

2.3 Exakte Differentialgleichungen
auf R gilt, dann ist die aquivalente Gleichung (∗) exakt und man nennt M integrierendenFaktor oder Euler’schen Multiplikator.
M(x, y)P (x, y)dy +M(x, y)Q(x, y)dy = 0M muss also erfullen:
∂(MP )∂y
=∂(MQ)∂x
⇐⇒ ∂M
∂yP +M
∂P
∂y=∂M
∂xQ+M
∂Q
∂x
Dies ist eine partielle Dgl. fur M . Jedoch brauchen wir nicht alle Losungen, sondern nureine. Naturlich funktioniert das nicht immer. Es gibt Gleichungen der Form (I1), derenNicht-Exaktheit nicht durch einen integrierenden Faktor ”geheilt“ werden kann.
Beispiel 2.3.11
a) 4x+ 3y2 + 2xyy′ = 0, d.h. 4x+ 3y2 + 2xy dydx = 0, d.h. (4x+ 3y2)︸ ︷︷ ︸=P
dx+ 2xy︸︷︷︸=Q
dy = 0
– Prufung auf Exaktheit
∂P
∂y= 6y,
∂Q
∂x= 2y ⇒ nicht exakt (z.B. R = R2)
– Suche nach einem integrierenden Faktor
M muss erfullen:∂(MP )∂y
=∂(MQ)∂x
hier∂M
∂y(4x+ 3y2) +M6y =
∂M
∂x2xy +M2y
⇐⇒ 4My =∂M
∂x· 2xy − ∂M
∂y(4x+ 3y2)
Nach langerem Betrachten verwenden wir den Ansatz: ∂M∂y = 0, d.h. M hangtnur von x ab. Dann erhalt man:
4My =∂M
∂x2xy
y 6=0⇐⇒ 2M =∂M
∂xx
Losung: M(x, y) = x2
Falls man es nicht direkt sieht, geht dies auch wie folgt: [zur Vereinfachung M = M(x)]
M ′ =2
xM (x 6= 0) linear, homogen, Ordnung 1
⇒ M(x) = C exp
Z2
xdx = C exp(2 ln |x|)
= C exp ln |x|2 = Cx2 (z.B.C = 1)
Ergebnis: Es existiert ein integrierender Faktor, z.B. M(x) = x2
x2(4x+ 3y2)dx+ x2 · 2xy dy = 0
⇔ (4x3 + 3x2y2)dx+ 2x3y dy = 0
29

2 Gewohnliche Differentialgleichungen 1. Ordnung
ist in der Tat exakt, denn
∂
∂y(4x3 + 3x2y2) = 6x2y,
∂
∂x(2x3y) = 6x2y
Beachte aber: M verschwindet bei x = 0, genauer:
M(x, y) = 0 ∀(x, y) = (0, y), y ∈ R
Also muss das Rechteck ohne x = 0 gewahlt werden, z.B.
R ={
(x, y) ∈ R2 | x > 0}
Es gilt z.B. auf R2:
Ausgangsgleichung =⇒ exakte Gleichung =⇒ y(x) = . . .
Findet man Losungen, die uber x = 0 hinausgehen, so musste man hierfurdie Probe machen. (Einsetzen bei x = 0)
– Lose die aquivalente exakte Dgl.
∗ Finde eine Stammfunktion F
F (x, y) =∫
4x3 + 3x2y2 dx = x4 + x3y2 + C1(y)
undF (x, y) =
∫2x3y dy = x3y2 + C2(x)
also z.B. F (x, y) = x3y2 + x4 != C
∗ Lose die Gleichung F (x, y) = C
x3y2 + x4 = C (∗)x 6=0⇐⇒ y2 =
C
x3− x
⇐⇒ y = ±√C
x3− x (∗∗)
Definitionsbereich? Bedingung: Cx3 − x ≥ 0⇐⇒ C
x3 ≥ xFall 1 Rechteck R mit x > 0 gewahlt
C
x3− x ≥ 0 x3>0⇐⇒ C ≥ x4 x>0⇐⇒ x ≤ 4
√C, sofern C > 0
(sonst keine Losung, vgl. (∗))Fall 2 x < 0
C
x3− x ≥ 0 x3<0⇐⇒ C ≤ x4
Somit: {x ≤ − 4
√C falls C > 0
x < 0 sonst
30

2.3 Exakte Differentialgleichungen
Man muss sich hier wegen der Division durch x in (∗) eine Frage stellen:Kann hierdurch eine Losung y, die uber x = 0 hinausgeht, die also sowohlin R− als auch in R+ einen Teil ihres Definitionsbereichs hat, verlorengegangen sein?
Sei y eine solche Losung. Fur diese gilt (s.o.)
x3y(x)2 + x4 = C
speziell bei x = 00 + 0 = C ⇔ C = 0
Also muss y erfullen:
x3y(x)2 + x4 = 0
⇐⇒ x3(y(x)2 + x) = 0
Außerhalb von x = 0 ist somit
y(x) = ±√−x, x ≤ 0
Dies ist keine neue Losung. C = 0 liefert namlich in (∗∗):
y(x) = ±√
0x3− x = ±
√−x
Beachte außerdem, dass diese Funktionen nicht dfzb. bei x = 0 sind.(dadurch auch keine Probe erforderlich)Wir haben damit alle Losungen der (ursprunglichen) Dgl. fur beliebigeRechtecke im R2 gefunden.
b) xy2 + y − xy′ = 0, d.h. (xy2 + y)︸ ︷︷ ︸=P
dx −x︸︷︷︸=Q
dy = 0
∂P
∂y= 2xy + 1,
∂Q
∂x= −1⇒ nicht exakt
integrierender Faktor:
∂M
∂y(xy2 + y) +M(2xy + 1) =
∂M
∂x(−x) +M(−1)
⇐⇒ ∂M
∂y(xy2 + y) + 2M(xy + 1) = −∂M
∂xx
Wir versuchen es wieder mit ∂M∂y = 0:
2M(xy + 1) = −∂M∂x
x
Wir sehen hier, dass M doch von y abhangen musste.
Also 2. Versuch:
∂M
∂x= 0 :
∂M
∂y(xy2 + y) + 2M(xy + 1) = 0 (∗)
31

2 Gewohnliche Differentialgleichungen 1. Ordnung
kurz (M = M(y)): M ′(xy2 + y) + 2M(xy + 1) = 0
⇐⇒ (M ′xy2 + 2Mxy) + (M ′y + 2M) = 0
⇐⇒ xy(M ′y + 2M) + (M ′y + 2M) = 0
⇐= M ′y + 2M = 0 (ein M reicht, also ”⇐“ O.K.)
⇐⇒ M ′ =y 6=0−2yM
M(y) = C exp∫−2ydy = C exp (−2 ln |x|) = C
1y2
(z.B. C = 1)
Also y = 0 ausschließen, entweder im Bereich y < 0 oder bei y > 0.Dort aquivalente exakte Dgl.(
x+1y
)dx− x
y2dy = 0 (beachte: y = 0 ausgeschlossen)
Stammfunktion:
F (x, y) =∫x+
1ydx =
x2
2+x
y+ C1(y)
F (x, y) =∫− x
y2dy =
x
y+ C2(x)
also istx2
2+x
y
!= C
implizite Losung der Gleichung. (trotzdem nach y auflosen, s. Ausgangsgleichung)explizite Losung:
x
y= C − x2
2
⇐⇒ y =x
C − 12x
2=
2x2C − x2
=2x
C − x2, C ∈ R konstant
Definitionsbereich? Es muss gelten:
– C 6= x2
– x 6= 0 (siehe Zwischenschritt: Kehrwertbildung bei xy )
– y 6= 0⇔ x 6= 0
Die Intervalle, die den Definitionsbereich von y bilden, durfen also nicht x = 0und, wenn C > 0, nicht ±
√C enthalten.
Wie schon bei der Herleitung des integrierenden Faktors erkannt, hat man hiereine Einschrankung auf nur positive oder nur negative x-Werte (bzw. y-Werte).
Aber beim Einsetzen der expliziten Losung in die Ausgangsgleichung sieht man,dass
x · 4x2
(C − x2)2+
2xC − x2
− x · 2(C − x2) + 2x(−2x)(C − x2)2
= 0,
32

2.4 separierbare Differentialgleichungen
insbesondere bei x = 0.
Somit ist y(x) bei x = 0 nicht nur definiert (wenn C 6= 0), sondern die Funktionerfullt auch dort die ursprungliche Dgl. und somit auf ganz R\{x | x2 = C}; imGegensatz zur exakten Dgl.
Außerdem ist y ≡ 0 eine weitere Losung der Ausgangsgleichung, nicht jedoch derexakten Dgl.
Die Verwendung eines integrierenden Faktors kann dazu fuhren, dass Losungen verlorengehen!
Dies kann entstehen, wenn fur den integrierenden Faktor der Definitionsbereich derLosung weiter eingeschrankt werden muss.
2.4 separierbare Differentialgleichungen
Eine separierbare Dgl. (Dgl. mit getrennten Variablen) hat die Form
y′ = f(x)g(y)
Methode der Separation der Variablen:
dy
dx= f(x)g(y)
1g(y)
dy = f(x)dx
(dafur muss g 6= 0 uberall gelten)∫1
g(y)dy =
∫f(x)dx
(dafur mussen g und f stetig sein)Das geht mathematisch sauber!
Satz 2.4.1 Seien Ix, Iy ⊂ R Intervalle und f : Ix → R, g : Iy → R stetige Funktionen,wobei g(y) 6= 0 ∀y ∈ Iy. Ist x0 ∈ Ix und y0 ∈ Iy, so gibt es eine Umgebung von x0, inder das AWP
y′ = f(x)g(y), y(x0) = y0
eindeutig losbar ist. Diese Losung erhalt man durch Auflosen der Gleichung∫ y
y0
1g(t)
dt =∫ x
x0
f(t) dt
nach y.Alternativ kann auch die Gleichung∫
1g(y)
dy =∫f(x) dx+ C
nach y aufgelost werden, wobei dann C aus der Anfangsbedingung y(x0) = y0 zu be-stimmen ist.
33

2 Gewohnliche Differentialgleichungen 1. Ordnung
Beweis.
dy
dx= f(x)g(y)
⇐⇒ 1g(y)
dy
dx− f(x) = 0
⇐⇒ 1g(y)
dy − f(x) dx = 0
ist eine exakte Dgl.:∂
∂x
(1
g(y)
)= 0,
∂
∂y(−f(x)) = 0
−f und 1g haben Stammfunktionen, da f und g stetig sind und g(y) 6= 0 ∀y ∈ Iy.
F (x, y) := −∫f(x) dx+
∫1
g(y)dy
ist somit eine Stammfunktion der Dgl.:
∂F
∂x= −f, ∂F
∂y=
1g
siehe Satz 2.3.7.: x0 ∈ Ix, y0 ∈ Iy, F (x0, y0) = C, F ∈ C(1),∂F
∂y=
1g6= 0
⇒ ∃ Umgebung von x0, wo F (x, y) = C eindeutig in eine C(1)-Fkt. y auflosbar ist.Diese ist dort die Losung des AWP.
F (x, y) = C ⇐⇒ −∫f(x) dx+
∫1
g(y)dy = C
bzw.
F (x, y) = F (x0, y0)︸ ︷︷ ︸=C
−∫ x
x0
f(t) dt+∫ y
y0
1g(t)
dt!= C
⇐⇒ −∫ x
x0
f(t) dt+∫ y
y0
1g(t)
dt = 0
Beachte!
• Eine Probe ist daher nicht mehr notig.
• Der Definitionsbereich der Losung muss am Schluss noch geklart werden.
• Eine Auflosung y(x) (bzw. x(y)) existiert zwar theoretisch, jedoch kann es Fallegeben, wo dies praktisch nicht durchfuhrbar ist. Dann kann man die Losung nurimplizit angeben: ∫
1g(y)
dy =∫f(x) dx+ C
34

2.4 separierbare Differentialgleichungen
Beispiel 2.4.2 a) y′ = −ey, y(1) = 0, d.h. f ≡ 1, g(y) = −ey, z.B. Ix = R, Iy = Rmoglich.
dy
dx= −ey ⇐⇒ −
∫e−y dy =
∫1 dx+ C ⇐⇒ e−y = x+ C
⇐⇒ −y = ln(x+ C)⇐⇒ y = ln1
x+ C
y(1) = 0 bedeutet
0 = ln1
1 + C⇐⇒ 1
1 + C= 1⇐⇒ 1 + C = 1⇐⇒ C = 0
Also y(x) = ln 1x .
Alternative:
−∫ y
0e−t dt =
∫ x
11 dt⇐⇒ e−t
∣∣∣∣y0
= t
∣∣∣∣x1
⇐⇒ e−y − 1 = x− 1⇐⇒ e−y = x⇐⇒ −y = lnx⇐⇒ y = ln1x
Definitionsbereich: x ∈ R+
b) y′ =1
(cos2 2x)(cos2 y), y(π
8
)= 0, d.h. f(x) =
1cos2 2x
, g(y) =1
cos2 yf und g haben Singularitaten. Beachte cosx = 0⇔ x ∈
{2n+1
2 π | n ∈ Z}
.Wegen der Anfangsbedingung wahlen wir
Iy =(−π
2,π
2
), Ix =
(−π
4,π
4
)∫ y
0cos2 t dt =
∫ x
π8
1cos2 2t
dt (∗)
Es giltd
dt(sin t cos t+ t) = cos2 t− sin2 t+ 1 = 2 cos2 t
undd
dttan t =
1cos2 t
Somit gilt:
(∗)⇐⇒ 12
(sin t cos t+ t)∣∣∣∣y0
=12
tan 2t∣∣∣∣xπ8
⇐⇒ sin y cos y + y = tan 2x− tanπ
4= tan 2x− 1
⇐⇒ 12
sin 2y + y = tan 2x− 1
Zwar theoretisch aber nicht praktisch nach y auflosbar; daher Auflosung nach x.
tan 2x =12
sin 2y + y + 1
⇐⇒ x(y) =12
arctan(
12
sin 2y + y + 1)
35
2 Gewohnliche Differentialgleichungen 1. Ordnung
Definitionsbereich? Fur die Auflosung muss der tan invertierbar sein. Dies gilt z.B.fur tan: (−π
2 ,π2 )→ R, d.h. x ∈ (−π
4 ,π4 ) = Ix. Also ist keine weitere Einschrankung,
insbesondere auch nicht fur y, notwendig.
Da die Gleichung die Funktion x 7→ y(x) als Unbekannte hat, ist eine Auflosungnach y naturlich vorzuziehen. Wenn dies nicht geht, ist die Auflosung nach x (d.h.die Umkehrfunktion der gesuchten Funktion) sozusagen die zweite Wahl.Die dritte Wahl ware die Angabe der Losung in impliziter Form.
c) y′ =xe2x
y cos y, y(0) =
π
4. Also
f(x) = xe2x, g(y) =1
y cos y, Ix = R, Iy =
(0,π
2
)(wg. y und cos y im Nenner und y0 = π
4 )
∫ y
π4
y cos y dy =∫ x
0xe2x dx
⇐⇒ y sin y|yπ4−∫ y
π4
sin y dy = xe2x
2
∣∣∣∣x0
−∫ x
0
e2x
2dx
⇐⇒ y sin y − π
4sin
π
4+ cos y − cos
π
4=x
2e2x − 1
4e2x +
14
⇐⇒ y sin y + cos y = e2x
(x
2− 1
4
)+
14
+√
22
(π4
+ 1)
(∗)
weder nach y noch nach x praktisch auflosbar.
(∗) ist ein implizites Integral des AWPs.
2.5 Explizit vs. implizit und Geometrisches
Wir vergleichen
y′ = f(x, y), y(x0) = y0 (Exp1)
(f : D → R, D ⊂ R2)
mit
g(x, y, y′) = 0, y(x0) = y0 (Imp1)
(g : E → R, E ⊂ R3)
Naturlich ist (Exp1) ein Spezialfall von (Imp1):
y′ − f(x, y)︸ ︷︷ ︸=g(x,y,y′)
= 0
Was bedeutet eine solche Dgl. geometrisch?Seien (ξ, η) fest. Dann muss, wenn y(ξ) = η, bei (Exp1) gelten:
y′(ξ) = f(ξ, y(ξ)) = f(ξ, η)
Die Dgl. legt die Steigung des Graphen von y in allen Punkten fest. Die Dgl. alleineliefert also fur alle (x, y) ∈ D einen Richtungsvektor. Wir haben somit eine Abb. D →S1 := {(x, y) ∈ R2 | |(x, y)| = 1}.
36
2.5 Explizit vs. implizit und Geometrisches
Defnition 2.5.1 Zu (Exp1) nennt man jedes Tripel (x, y, f(x, y)), (x, y) ∈ D, Linienele-ment und {(x, y, f(x, y)) | (x, y) ∈ D} Richtungsfeld.
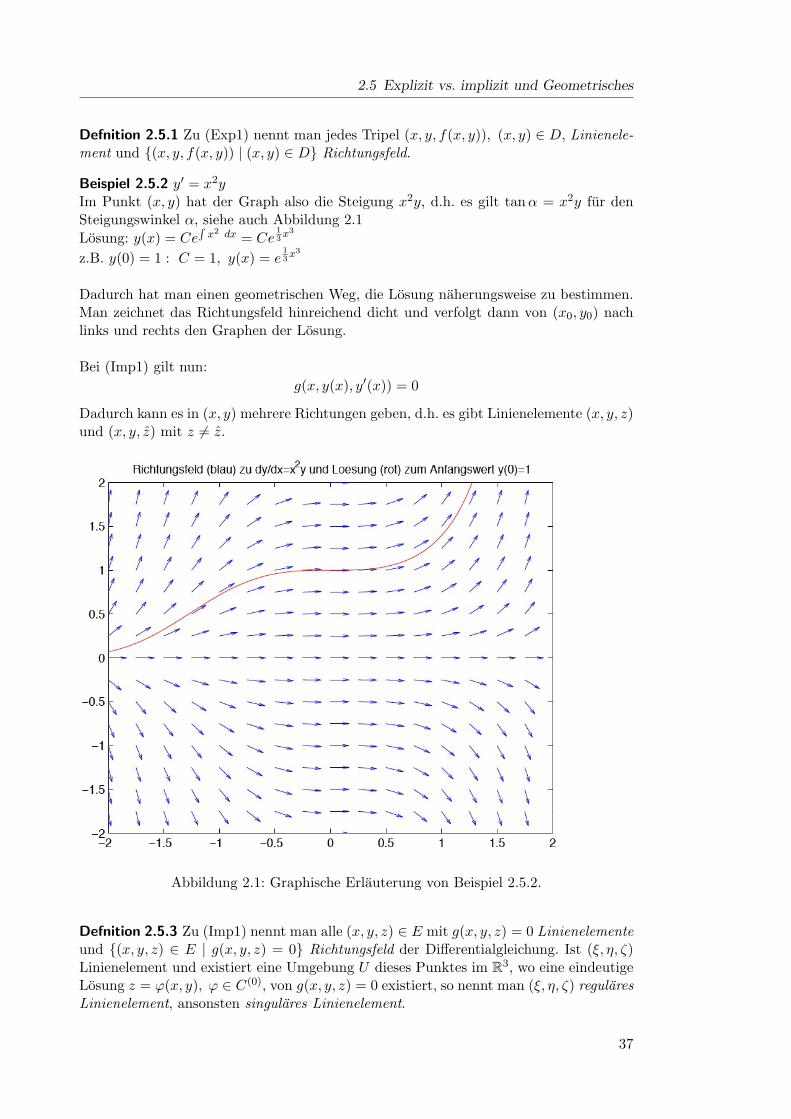
Beispiel 2.5.2 y′ = x2yIm Punkt (x, y) hat der Graph also die Steigung x2y, d.h. es gilt tanα = x2y fur denSteigungswinkel α, siehe auch Abbildung 2.1Losung: y(x) = Ce
Rx2 dx = Ce
13x3
z.B. y(0) = 1 : C = 1, y(x) = e13x3
Dadurch hat man einen geometrischen Weg, die Losung naherungsweise zu bestimmen.Man zeichnet das Richtungsfeld hinreichend dicht und verfolgt dann von (x0, y0) nachlinks und rechts den Graphen der Losung.
Bei (Imp1) gilt nun:g(x, y(x), y′(x)) = 0
Dadurch kann es in (x, y) mehrere Richtungen geben, d.h. es gibt Linienelemente (x, y, z)und (x, y, z) mit z 6= z.
Abbildung 2.1: Graphische Erlauterung von Beispiel 2.5.2.
Defnition 2.5.3 Zu (Imp1) nennt man alle (x, y, z) ∈ E mit g(x, y, z) = 0 Linienelementeund {(x, y, z) ∈ E | g(x, y, z) = 0} Richtungsfeld der Differentialgleichung. Ist (ξ, η, ζ)Linienelement und existiert eine Umgebung U dieses Punktes im R3, wo eine eindeutigeLosung z = ϕ(x, y), ϕ ∈ C(0), von g(x, y, z) = 0 existiert, so nennt man (ξ, η, ζ) regularesLinienelement, ansonsten singulares Linienelement.
37

2 Gewohnliche Differentialgleichungen 1. Ordnung
Beispiel 2.5.4 (y′)2 = x2y2, d.h. y′ = ±xy.
Abbildung 2.2: Graphische Erlauterung von Beispiel 2.5.4.
In Abbildung 2.2 steht blau fur ”+“ und grun fur ”-“.
y′ = +xy hat die allg. Losung y(x) = CeRx dx = Ce
12x2
y′ = −xy hat die allg. Losung y(x) = CeRx dx = Ce−
12x2
Beachte, dass
y(x) =
{Ce
12x2
, x ≤ 0Ce−
12x2
, x > 0
y(x) =
{Ce−
12x2
, x ≤ 0Ce
12x2
, x > 0
auch Losungen der impliziten Gleichung sind.
Satz 2.5.5 Sei (Imp1) gegeben. Seien g und ∂g∂z in einer Umgebung von (ξ, η, ζ) ∈ E
stetig und
g(ξ, η, ζ) = 0,∂g
∂z(ξ, η, ζ) 6= 0
Dann ist (ξ, η, ζ) ein regulares Linienelement.
Beweis. siehe Satz uber implizite Funktionen.
38

2.5 Explizit vs. implizit und Geometrisches
Beispiel 2.5.6 Die Voraussetzung des Satzes 2.5.5. sind nur hinreichend. Betrachte g(x, y, z) =(z − f(x, y))2, f ∈ C(0).Jedes Linienelement ist regular, denn g(x, y, z) = 0⇔ z = f(x, y).Aber die Voraussetzungen des Satzes 2.5.5. gelten nicht, weil
∂g
∂z(x, y, z)
∣∣∣∣(ξ,η,ζ)
=[2(z − f(x, y)) · 1
]∣∣∣∣∣(ξ,η,ζ)
= 0
fur Linienelemente (ξ, η, ζ).
Es gibt verschiedene Ansatze, die jeweils fur einen Teil der impliziten Dgl. geeignet sind:
Verfahren 2.5.7 (Parameterdarstellung mit y′ als Parameter) gegeben: g(x, y, y′) = 0Ansatz: Finde eine C(1)-Parameterdarstellung der Trajektorien t 7→ (x(t), y(t)) mit
y(t) = tx(t)
=⇒ y′ =dy
dx=dy
dt· dtdx
=dy
dt·(dx
dt
)−1
= t
(nach Kettenregel und Umkehrsatz) wenn x(t) 6= 0.Angenommen, es gibt eine explizite Losung von g(x, y, y′) = 0 der Form y = ϕ(x) (diesemuss fur die Durchfuhrung des Verfahrens nicht bekannt sein). Dann gilt:
t = y′ = ϕ′(x)
Ist dies nach x auflosbar (hinreichend hierfur ist, dass ϕ′′ 6= 0), so hat man eine Funktiont 7→ x(t) und damit auch y in Abhangigkeit von t:
y(t) = ϕ(x(t))
Die ergibt die gesuchte Parameterdarstellung t 7→ (x(t), y(t)), denn y = ϕ′ · x = tx.Wir haben dann
y(t) = tx(t)g(x(t), y(t), t) = 0
}bestimme hieraus
(x(t), y(t))
Beispiel 2.5.8 a) x = (y′)2 ⇔ x− (y′)2 = 0also:
y = tx (1)
x− t2 = 0⇔ x(t) = t2 (2)
(2) in (1): y = t · 2t = 2t2 ⇒ y(t) = 23 t
3 + C
Somit: y(x) =23x
32 + C, x > 0
b) allgemein: x = g(y′)⇔ x− g(y′) = 0
y = tx (1)x− g(t) = 0⇔ x(t) = g(t) (2)
Sei g ∈ C(1). Dann ergibt das Einsetzen von (2) in (1):
y = tg =⇒ y(t) =∫tg(t) dt+ C
39

2 Gewohnliche Differentialgleichungen 1. Ordnung
c) y = xy′ + ey′
y = tx (1)y = xt+ et ⇒ y = tx+ x+ et (2)
(1)⇒ x(t) = −et
Einsetzen der Losung in (2) ergibt:
y(t) = −ett+ et = et(1− t)
=⇒x=−et
⇔t=ln(−x)
y(x) = −x(1− ln(−x)) = x(ln(−x)− 1), x < 0
Dies sind aber nicht alle Losungen, denn
y(x) = cx+ ec, c ∈ R
sind ebenfalls Losungen:
y′(x) = c ∀x ∈ R, y(x) = x · c+ ec
Warum wurden diese Losungen ubersehen?
In der Herleitung des Ansatzes wurde von einer Losung y = ϕ(x) ausgegangen, beider t(= y′) = ϕ′(x) nach x auflosbar ist. Bei den ubersehenen Losungen ist jedochϕ′ = const.
Insbesondere affin-lineare Losungen, d.h. Losungen y(x) = ax + b, werden beidieser Technik ubersehen.
Sehen wir uns die hergeleitete Losung y(x) = x(ln(−x)− 1) und die Geradenscharyc(x) = cx+ ec genauer an.
In der Parametrisierung ist fur t = c:
y = ec(1− c), x = −ec
undyc(−ec) = −cec + ec
D.h. der Punkt (x(c), y(c)) liegt auf der Geraden, die durch yc gegeben ist. Es liegtsogar die gleiche Steigung vor:
Steigung von t 7→ (x(t), y(t)) :y(t)x(t)
= t
Also in (x(c), y(c)): Steigung c.Gerade: Steigung c.
D.h. yc ist Tangente an (x(t), y(t)) in t = c ∀c ∈ R.
Man nennt diese Kurve t 7→ (x(t), y(t)) daher Enveloppe der Geradenschar, sieheauch Abbildung 2.3.
Allgemein hat die Clairaut-Dgl. y = xy′+g(y′), g ∈ C(2), g′′ 6= 0 nur die Losungen
”Geradenschar“ und ”Enveloppe“.
40

2.5 Explizit vs. implizit und Geometrisches
Abbildung 2.3: Ausgewahlte Losungen des Beispiels 2.5.8.
Verfahren 2.5.9 (Integration durch Differentiation) gegeben: g(x, y, y′) = 0Angenommen, es gibt wieder eine parametrisierte Losung t 7→ (x(t), y(t)) mit y(t) =tx(t), d.h.
g(x(t), y(t), t) = 0 ∀t (y′ = t, s.o.)
∂g
∂xx+
∂g
∂yy +
∂g
∂t= 0 (1)
(kurz: gx := ∂g∂x , ...)
Ferner
y − tx = 0⇔ y = tx (2)
→ ”LGS“ fur x und y
(2) in (1): (gx + gyt)x+ gt = 0⇒ Wenn gx + gyt 6= 0, dann ist x = − gt
gx + gyt(2)⇒ y = − tgt
gx + gyt
Beachte: g hangt von x, y und t ab.⇒ System von zwei Dgl.
41

2 Gewohnliche Differentialgleichungen 1. Ordnung
2.6 Die Bernoulli’sche Differentialgleichung
y′ + g(x)y + h(x)yα = 0 , α ∈ R\{1} (BD)
ist eine explizite, nicht-lineare Dgl. 1. Ordnung. Wir nehmen an, dass g und h stetig aufeinem Intervall I sind.Die Bernoulli’sche Dgl. lasst sich wie folgt in eine lineare Dgl. umwandeln.
Multiplikation von (BD) mit (1− α)y−α ergibt:
(1− α)y−αy′ + (1− α)g(x)y1−α + (1− α)h(x) = 0
Die Substitution z := y1−α unter Berucksichtigung von z′ = (1− α)y−αy′ liefert:
z′ + (1− α)g(x)z + (1− α)h(x) = 0 (BD∗)
Somit gilt: Lost z die lineare Dgl. (BD∗), so ist y(x) := (z(x))1
1−α eine Losung von (BD),sofern z > 0.→ Satz 2.2.3. und Satz 2.2.4.: (BD∗) mit y(x0) = y0 stets eindeutig losbar.
Fall 1 α ∈ R+\Z :
Wg. yα in der Gleichung muss y ≥ 0 gelten. Aber die Substitution z := y1−α
erfordert y > 0 (beachte die Formel fur z′) ⇒ Die Substitution liefert nur positiveLosungen.
Jedoch ist y ≡ 0 auch eine Losung von (BD).
Positive Losungen wie bekannt als Losungen der linearen Dgl. (BD∗) bestimmenund Rucksubstitution. → prufen, ob fortsetzbar zu y ≡ 0.
Beispiel: y′ =√y ⇔ y′ + 0 · y + (−1)y
12 = 0 ist (BD) mit α = 1
2 .
z′ +12· 0 +
12
(−1) = 0
⇐⇒ z′ =12
⇐⇒ 12x+ c = z(x)
Also y(x) = (z(x))1
1− 12 = z(x)2 =
(12x+ c
)2
Bei x = −2c Beruhrung der x-Achse.
y(−2c) = 0, y′(x) = 2(
12x+ c
)· 1
2=
12x+ c
⇒ y′(−2c) = 0und y ≡ 0 weitere Losung. (vgl. Aufgabe 4)
weitere Losungen:
y(x) =
{0 , x ≤ −2c(
12x+ c
)2, x > −2c
42

2.6 Die Bernoulli’sche Differentialgleichung
y(x) =
{(12x+ c
)2, x ≤ −2c
0 , x > −2c
(C(1)-Losungen von (BD))
Fall 2 α ∈ R−\Z :
Wg. yα nur positive Losungen von (BD) moglich.⇒ Substitution z = y1−α ist Aquivalenzumformung, wobei nur nach positivenLsg’en von (BD∗) gesucht wird.⇒ ∃! Lsg. von (BD) mit y(x0) = y0 > 0. Diese erhalt man aus der eindeutigenLsg. von (BD∗) mit z(x0) = y1−α
0
Fall 3 α+ 1 ∈ 2Z, d.h. α ungerade:
Keine Einschrankungen an den Wertebereich von y (außer y 6= 0 fur neg. α).
Betrachte: Erfullt y (BD), so gilt
(−y)′ + g(x) · (−y) + (−1)α+1h(x) · (−y)α
= − (y′ + g(x)y + h(y)yα) = 0
wobei hier (−1)α+1 = 1.
D.h. y Losung von (BD) ⇐⇒ u := −y Losung von (BD).
Beachte, dass die Substitution z := y1−α nur moglich ist, wenn
1− α ≥ 0 und y bel.
oder1− α < 0 und y 6= 0
(Nach dem Zwischenwertsatz ist ”y 6= 0“ aquivalent zu ”y nur positiv oder nurnegativ“.)
Außerdem ist bei der Rucksubstitution y = z1
1−α zu beachten, dass 11−α i.A. nicht
ganzzahlig ist, so dass hierfur nur nicht-negative Losungen z von (BD∗) verwendbarsind.Also: Bestimme alle positiven Lsg’en z von (BD∗) und setze dann
y(x) := ±(z(x))1
1−α
weitere Losung: y ≡ 0 (wenn α > 0)
}alle Losungen (inkl.evtl. Kombinationen)
Fall 4 α ∈ 2Z
s.o.: (−1)α+1 = −1, d.h. y ist genau dann Losung von (BD), wenn u := −y mit−h statt h (BD) erfullt.
Somit: y negative Lsg. von (BD) ⇐⇒ v := (−y)1−α ist positive Lsg. von (BD∗) mit−h statt h, d.h.
v′ + (1− α)g(x)v − (1− α)(−h(x)) = 0⇐⇒ (−v)′ + (1− α)g(x) · (−v) + (1− α)(−h(x)) = 0
⇐⇒ z = −v (= −(−y)1−α) ist negative Losung von (BD∗)
43

2 Gewohnliche Differentialgleichungen 1. Ordnung
Also: Eine positive Losung z von (BD∗) ergibt y := z1
1−α als positive Losungvon (BD).Eine negative Losung z von (BD∗) ergibt y := −(−z)
11−α als negative
Losung von (BD).
Zusammen:Ist z Lsg. von (BD∗) bel. Vorzeichens, so ist
y(x) := (sgn z(x)) · |z(x)|1
1−α
Lsg. von (BD).Hier fehlen aber, wenn 1− α < 0 (⇔ α > 1) Lsg’en mit y = 0, z.B. y ≡ 0.
Beispiel 2.6.1 y′ + y1+x + (1 + x)y4 = 0, y(0) = −1 (d.h. x 6= −1), also α = 4
( Fall 4)Die Dgl. ist fur y ∈ R definiert.Substitution z = y1−α = y−3 und Multiplikation mit (1− α)y−α = −3y−4:
−3y−4y′ − 3y−3 · 11 + x
− 3(1 + x) = 0
z′ − 3z1
1 + x− 3(1 + x) = 0
(Beachte bei der Subst.: z 6= 0 erforderlich)
homogene Version: z′ = 31+xz ⇒ z(x) = Ce
R3
1+xdx = Ce3 ln |1+x| = C|1 + x|3
Wir beschranken uns auf x > −1 (beachte x 6= −1 und die Anfangsbed.)inhomogene Gleichung: Variation der Konstanten
z(x) = C(x)(1 + x)3
in die Dgl.:
C ′(x)(1 + x)3 + C(x)3(1 + x)2 − 3C(x)(1 + x3)1
1 + x− 3(1 + x) = 0
⇐⇒ C ′(x) = 3(1 + x)−2, z.B. C(x) = −3(1 + x)−1
⇒ allg. inhomogene Losung: z(x) = −3(1 + x2) + C(1 + x)3, C ∈ R
Somit (s.o., Fall 4):
y(x) = sgn[−3(1 + x)2 + C(1 + x)3
] ∣∣−3(1 + x)2 + C(1 + x)3∣∣ 1
1−4
= sgn[(1 + x)2(−3 + C(1 + x))
] ∣∣(1 + x)2(−3 + C(1 + x))∣∣− 1
3
=sgn(−3 + C(1 + x))
3√
(1 + x)2| − 3 + C(1 + x)|
sowie: y ≡ 0.(das sind alle, da keine C(1)-Zusammensetzung von y = 0 und obiger Lsg. moglich)
44

2.7 Die Riccati’sche Differentialgleichung
Anfangsbedingung y(0) = −1. Damit scheidet y ≡ 0 aus.
=⇒ −1 =sgn(−3 + C(1 + 0))
3√
(1 + 0)2| − 3 + C(1 + 0)|
=sgn(C − 3)
3√|C − 3|
⇐⇒ C − 3 < 0 und |C − 3| = 1⇐⇒ C = 2
Def’bereich?
• x 6= −1⇒ hochstens ]− 1,∞[
• Nullstellen des Nenners:x = −1x = 1
2
wg. Anfangsbedingung x ∈]− 1, 12 [. Dort 2x− 1 < 0.
y(x) = − 13√
(1 + x)2(1− 2x)
2.7 Die Riccati’sche Differentialgleichung
y′ + g(x)y + h(x)y2 = k(x) (RD)
g, h, k stetig auf Intervall I.(wie (BD) mit α = 2, aber Term k(x) neu)
Wir versuchen den Ansatz fur (BD):Substitution z = y1−α = 1
y und Multiplikation mit (1− α)y−α = − 1y2 .
− y′
y2− g(x)
1y− h(x) = −k(x)
y2
⇐⇒ z′ − g(x)z − h(x) = −k(x)z2
Wenn k ≡ 0: (BD) mit α = 2 (s.o.):
y ≡ 0, y =1z
Aber bei k 6≡ 0 kommt man so nicht zum Ziel, weil die neue Gleichung wieder nicht-linearist.Im Fall y 6≡ 0 ist i.A. keine geschlossene Darstellung der Losung moglich. Aber es gilt:
Satz 2.7.1 Ist φ Losung von (RD), so sind alle Losungen von (RD) von der Form (nebeny = φ)
y = φ+1z
wobei z allg. Lsg. der lin. Dgl.
z′ − [g(x) + 2φ(x)h(x)]z − h(x) = 0
ist.
45

2 Gewohnliche Differentialgleichungen 1. Ordnung
Beweis. Seien φ und y Losungen von (RD). Dann gilt fur u := y − φ:
u′ + g(x)u+ h(x)u2 = y′ − φ′ + g(x)y − g(x)φ+ h(x)φ2 − 2h(x)yφ
= y′ + g(x)y + h(x)y2 − (φ′ + g(x)φ+ h(x)φ2) + 2h(x)φ2 − 2h(x)yφ(RD)= k − k + 2h(x)φ (φ− y)︸ ︷︷ ︸
=−u
⇐⇒ 0 = u′ + g(x)u+ h(x)u2 + 2h(x)φu
⇐⇒ 0 = u′ + (g(x) + 2h(x)φ(x))u+ h(x)u2
(BD) mit α = 2
Also Multiplikation mit (1− α)u−α = −u−2 und Substitution z := u1−α = 1u2 :
− u′
u2+ (g(x) + 2h(x)φ(x))
(− 1u
)− h(x) = 0
⇐⇒ z′ − (g(x) + 2h(x)φ(x))z − h(x) = 0
Beispiel 2.7.2 y′ − 2xy − y2 = 2
spezielle Losung: φ(x) = −1x
(φ′ − 2xφ− φ2 = 1x2 + 2x 1
x −1x2 = 2)
Gleichung fur z: z′−(−2x+ 2
(−1x
)(−1)
)z− (−1) = 0⇐⇒ z′−
(2x− 2x
)z+ 1 = 0
homogen: z′ = 2(
1x− x)z ⇐⇒ z(x) = C exp
(2∫
1x− x dx
)= C exp
(lnx2 − x2
)= C
(x2 · e−x2
)inhomogen: Variation der Konstanten:
C ′(x)x2e−x2
+ C(x)(
2xe−x2
+ x2(−2x)e−x2)−(
2C(x)xe−x2 − 2C(x)x3e−x
2)
+ 1 = 0
⇐⇒ C ′(x) = −x−2ex2
⇐⇒ C(x) = x−1ex2 −
∫x−12xex
2dx = x−1ex
2 − 2∫ex
2dx
E(x) :=∫ x
0et
2dt
allg. inh. Lsg.: z(x) = x− 2x2e−x2E(x)︸ ︷︷ ︸
partik. Lsg.
+Cx2e−x2
=⇒ allg. Lsg. der (RD):
y(x) = −1x
oder y(x) = −1x
+(x− 2x2e−x
2E(x) + Cx2e−x
2)−1
= −1x
+1
x+ x2e−x2(−2E(x) + C)
=−1− xe−x2
(C − 2E(x)) + 1x+ x2e−x2(C − 2E(x))
= − e−x2(C − 2E(x))
1 + xe−x2(C − E(x))
Wobei y(0) = −1 · (C − 2 · 0)1 + 0
= −C. Damit ist jedes AWP y(0) = y0 losbar.
46

2.8 Abhangigkeitssatze
Satz 2.7.3 Das AWP
y′ + g(x)y + h(x)y2 = k(x) y(x0) = y0
wobei g, h, k : ]−∞, x0] −→ R stetig sind und h < 0, k ≤ 0 auf ]−∞, x0], y0 ≥ 0, hatgenau eine Losung. Diese existiert (mindestens) auf ]−∞, x0].
(ohne Beweis, → Theorie der opt. Steuerungen)
Beispiel 2.7.4 a) y′−y2 = −1, y(x0) = y0 ≥ 0 hat genau eine Losung, diese ist global(d.h. sie existiert auf ganz R) fur |y0| ≤ 1, fur y0 > 1 Losung auf ]−∞, γ(y0)︸ ︷︷ ︸
>x0
[, fur
y0 < −1 Losung auf ] γ(y0)︸ ︷︷ ︸<x0
,+∞[. (siehe Ubung)
b) y′ − y2 = 1, y(0) = 0 wird gelost durch y(x) = tanx, x ∈]− π
2 ,π2
[.
c) y′ + y2 = −1, y(0) = 0 hat die Losung y(x) = − tanx, x ∈]− π
2 ,π2
[.
d) y′ − y − e−xy2 = −ex, y(0) = y0
Der Definitionsbereich der Losung hangt von y0 ab. Er ist teilweise eine Obermengevon R−0 (insb. fur y0 ≥ 0) und teilweise eine Obermenge von R+
0 . (siehe Ubung)
Eine lokale Losung hat (RD) jedoch stets nach Picard-Lindelof.
Satz 2.7.5 Unter den Voraussetzungen des Satzes 2.7.3. gilt:
a) Ist y0 ≥ 0, so ist y ≥ 0 auf ]−∞, x0].
b) Ist y0 > 0, so ist y > 0 auf ]−∞, x0].
(siehe auch die Ubungsbeispiele)
2.8 Abhangigkeitssatze
y′ = f(x, y), y(x0) = y0
Frage: Wie stark andert sich die Losung y, wenn f oder y0 leicht geandert werden?anders formuliert: Hangt die Losung y stetig von f und y0 ab?
praktische Relevanz:
• Variation von f ↔Modellungenauigkeiten (z.B. durch Vereinfachungen wie sinϕ ≈ϕ beim Fadenpendel oder ungenaue Naturgroßen (z.B. g)).
• Variation von y0 ↔ Messfehler
Satz 2.8.1 Sei R := [x0 − a, x0 + a] × [y0 − b, y0 + b] ⊂ R2 und f : R → R stetig bzgl.(x, y) und Lipschitzsch bzgl. y, d.h.
∃L > 0 : |f(x, y)− f(x, η)| ≤ L|y − η| ∀y, η ∈ [y0 − b, y0 + b] ∀x ∈ [x0 − a, x0 + a]
Ferner sei f : R→ R stetig.Hierzu seien
y : [x0 − α, x0 + α]︸ ︷︷ ︸=:J
−→ [y0 − b, y0 + b] und
47

2 Gewohnliche Differentialgleichungen 1. Ordnung
y : [x0 − β, x0 + β]︸ ︷︷ ︸=:J
−→ [y0 − b, y0 + b] (0 < β < α)
Losungen vony′ = f(x, y), y(x0) = y0 bzw.
y′ = f(x, y), y(x0) = y0.
Gilt |y0 − y0| ≤ σ und∥∥∥f − f∥∥∥
C(R)≤ ω, dann gilt:
|y(x)− y(x)| ≤ σeL|x−x0| +ω
L
(eL|x−x0| − 1
)∀x ∈ J
Bemerkung. Die Voraussetzungen an f sind genau die Voraussetzungen des Satzes vonPicard-Lindelof. Damit existiert y und ist eindeutig. f erfullt lediglich die Voraussetzun-gen des Satzes von Peano. Somit existiert eine Losung
∼y. Sie muss aber nicht eindeutig
sein.
Beweis. 1. Fortsetzung von yDa y stetig auf dem abgeschlossenen Intervall [x0−β, x0 +β] ist, kann es stetig zueiner Funktion ϕ0 auf J fortgesetzt werden (mit |ϕ0(x)− y0| ≤ b ∀x ∈ J) , z.B.
ϕ0(x) :=
y(x0 − β) , x < x0 − βy(x) , x0 − β ≤ x ≤ x0 + β
y(x0 + β) , x > x0 + β
2. Ein IterationsschrittWahle ϕ0 als Anfangsnaherung, in der Iteration nach Picard-Lindelof fur y′ =f(x, y), y(x0) = y0. Dies ergibt eine Folge von Funktionen auf J , die gleichmaßiggegen die Losung y konvergiert. Insbesondere gilt fur alle x ∈ J :
ϕ1(x) = y0 +∫ x
x0
f(t, ϕ0(t)) dt = y0 +∫ x
x0
f(t, y(t)) dt,
da ϕ0 = y auf J , und
y′ = f(x, y), y(x0) = y0
⇐⇒ y(x)︸︷︷︸=ϕ0(x)
= y0 +∫ x
x0
f(t, y(t)) dt
Also gilt fur alle x ∈ J :
|ϕ1(x)− ϕ0(x)| ≤ |y0 − y0|+∣∣∣∣∫ x
x0
|f(t, y(t))− f(t, y(t))| dt∣∣∣∣ Vor.≤ σ + ω|x− x0|
3. IterationDesweiteren ist ϕk(x) = y0 +
∫ x
x0
f(t, ϕk−1(t)) dt ∀k ∈ N\{0} und somit fur alle
x ∈ J :
|ϕk(x)− ϕk−1(x)| ≤∣∣∣∣∫ x
x0
|f(t, ϕk−1(t))− f(t, ϕk−2(t))| dt∣∣∣∣
48

2.8 Abhangigkeitssatze
Lipsch.≤ L
∣∣∣∣∫ x
x0
|ϕk−1(t)− ϕk−2(t)| dt∣∣∣∣
Also gilt fur alle x ∈ J :
|ϕk(x)− ϕk−1(x)| ≤ Lk−1
∣∣∣∣ ∫ x
x0
k−2︷ ︸︸ ︷∫ tk−2
x0
. . .
∫ t1
x0
|ϕ1(t)− ϕ0(t)| dt dt1 . . . dtk−2
∣∣∣∣2.≤ Lk−1
∣∣∣∣∫ x
x0
∫ tk−2
x0
. . .
∫ t1
x0
σ + ω|t− x0| dt dt1 . . . dtk−2
∣∣∣∣= Lk−1
(σ|x− x0|k−1
(k − 1)!+ ω|x− x0|k
k!
)Induktion:I.A. k = 1 klar.I.V. Behauptung gelte bis k.I.S. (k → k + 1)
|ϕk+1(x)− ϕk(x)| ≤ L∣∣∣∣∫ x
x0
|ϕk(t)− ϕk−1(t)| dt∣∣∣∣
I.V.≤ Lk
∣∣∣∣∫ x
x0
σ|t− x0|k−1
(k − 1)!+ ω|t− x0|k
k!dt
∣∣∣∣4. Grenzubergang
Da ϕn → y in ‖ · ‖C(J), ergibt in
|ϕk+l(x)− ϕk(x)| ≤l∑
j=1
|ϕk+j(x)− ϕk+j−1(x)|
3.≤
l∑j=1
Lk+j−1
(σ|x− x0|k+j−1
(k + j − 1)!+ ω|x− x0|k+j
(k + j)!
)∀x ∈ J
der Grenzubergang l→∞ (k = 0), dass
|y(x)− ϕ0(x)︸ ︷︷ ︸=y(x)
| ≤∞∑j=1
Lj−1
(σ|x− x0|j−1
(j − 1)!+ ω|x− x0|j
j!
)
=∞∑j=0
Lj(σ|x− x0|j
j!+ω|x− x0|j+1
(j + 1)!
)
=∞∑j=0
(σ
(L|x− x0|)j
j!+ω
L
(L|x− x0|)j+1
(j + 1)!
)= σeL|x−x0| +
ω
L
(eL|x−x0| − 1
)∀x ∈ J
Der Satz sagt zwei Dinge aus:
• Kleine Veranderungen beim Anfangswert (kleines σ) oder kleine Veranderungender Gleichung (kleines ω) bewirken auch nur kleine Anderungen bei der Losung.
49

2 Gewohnliche Differentialgleichungen 1. Ordnung
• Aber: weit weg von der Anfangsbedingung (|x − x0| groß) kann der Unterschiedgewaltig groß werden.
Beispiel 2.8.2 f(x, y) = f(x, y) = λy (λ > 0), y(x0) = 0, y(x0) = y0 6= 0=⇒ y ≡ 0, y(x) = y0e
λ(x−x0), x ∈ RVergleiche die Abschatzungen im Satz: L = λ, ω = 0, σ = |y0|=⇒ |y(x)− y(x)| ≤ |y0|eλ|x−x0|
Fur x > x0 ist die Fehlerabschatzung hier also scharf!
50
3 Lineare Differentialgleichungen hoherer Ordnungmit konstanten Koeffizienten
3.1 Ordnung 2
homogen, linear, 2. Ordnung, a, b konstant
y′′ + ay′ + by = 0 (L2kh)
inhomogen
y′′ + ay′ + by = s(x) (L2ki)
Anwendung: Schwingungenx+ αx+ βx = f(t)
αx: Dampfung/Reibungf(t): Erregungmf : außere Kraftm: Masse
x+ βx = 0
Gleichung des (ungedampften) harmonischen Oszillators.
Satz 3.1.1 (Superpositionsprinzip) Sind y1, . . . , ym Losungen von (L2kh), so ist jede Li-
nearkombinationm∑j=1
λjyj Losung von (L2kh).
Beweis. folgt direkt aus der Linearitat und der Homogenitat.
Satz 3.1.2 Die allgemeine Losung von (L2kh) ist gegeben durch (D := a2 − 4b, ”Diskri-minante“):
a) Falls D > 0:
y(x) = C1eλ1x + C2e
λ2x; λ1,2 =−a±
√D
2
b) Falls D = 0:y(x) = (C1 + C2x)e−
a2x
c) Falls D < 0:
y(x) = eαx (C1 cos(βx) + C2 sin(βx)) ; α := −a2, β :=
√−D2
jeweils mit C1, C2 ∈ R bel.Mit der Anfangsbedingung y(x0) = y0, y
′(x0) = y′0 gibt es genau eine Losung.
51

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Beweis. 1. Euler’scher Ansatzy(x) = eλx liefert
λ2eλx + aλeλx + beλx = 0
⇐⇒ λ2 + aλ+ b = 0
⇐⇒ λ1,2 = −a2±√a2
4− b =
12
(−a±√D)
also
a) D > 0⇒ zwei reelle Losungen
b) D = 0⇒ genau eine reelle Losung
c) D < 0⇒ zwei imaginare Losungen: λ1,2 = 12(−a± i
√−D)
2. Fall a) D > 0Superpositionsprinzip:
y(x) = C1eλ1x + C2e
λ2x
Losung mit bel. C1, C2 ∈ RAWP: y(x0) = C1e
λ1x0 + C2eλ2x0
!= y0
y′(x0) = C1λ1eλ1x0 + C2λ2e
λ2x0!= y′0
Da λ1 6= λ2, gibt es genau eine Losung.
3. Fall b) D = 0⇔ a2 = 4b
λ = −a2
=⇒ y(x) = eλx = e−a2x ist Losung
weitere Losung: y(x) = xeλx, denn
y′′ + ay′ + by = (2λeλx + xλ2eλx) + a(eλx + xλeλx) + bxeλx
= −aeλx +a2
4xeλx + aeλx − a2
2xeλx +
a2
4xeλx = 0
Superpositionsprinzip:
y(x) = C1eλx + C2xe
λx, C1, C2 ∈ R bel.
Mit der Anfangsbedingung erhalt man:
y(x0) = C1eλx0 + C2e
λx0x0!= y0
y′(x0) = C1λeλx0 + C2e
λx0(1 + x0λ) != y′0
Zugehorige Determinante:
e2λx0(1 + x0λ− λx0) = e2λx0 6= 0
⇒ Es gibt genau eine Losung.
4. Fall c) D < 0
λ1,2 =12
(−a± i√−D)
52

3.1 Ordnung 2
y(x) = exp[
12
(−a± i√−D)x
]= e−
a2x · e±i
√−D2
x
= e−a2x
[cos(√−D2
x
)± i sin
(√−D2
x
)]komplexe Losung der Differentialgleichung.
⇐⇒ y1(x) = e−a2x cos
(√−D2
x
)und
y2(x) = e−a2x sin
(√−D2
x
)reelle Losungen.
Beweis hierzu:allgemein: y = v + iw komplexe Losung von (L2kh), wobei v und w reell⇔ v und w reelle Losungen von (L2kh), denn:
0 = y′′ + ay′ + by = v′′ + av′ + bv + i(w′′ + aw′ + bw)
⇐⇒ v′′ + av′ + bv = 0 und w′′ + aw′ + bw = 0
Somit hat man
y(x) = C1eαx cos(βx) + C2e
αx sin(βx), α = −a2, β =
√−D2
Anfangsbedingung:
y(x0) = C1eαx0 cos(βx0) + C2e
αx0 sin(βx0) != y0
y′(x0) = C1eαx0(α cos(βx0)− β sin(βx0)) + C2e
αx0(α sin(βx0) + β cos(βx0)) != y′0
Determinante:
e2αx0(α sin(βx0) cos(βx0) + β cos2(βx0)− α sin(βx0) cos(βx0) + β sin2(βx0)
)= βe2αx0 6= 0
=⇒ genau eine Losung
5. Es gibt keine weiteren Losungenz.z.: Das AWP hat hochstens eine Losung: Waren die obigen Formeln nicht dieallgemeine Losung, so musste es nach dem Superpositionsprinzip noch (mind.)einen Freiheitsgrad geben und das AWP hatte mehr als eine Losung.
Der Beweis folgt spater.
Satz 3.1.3 Ist yp partikuklare Losung von (L2ki), so ist die allgemeine Losung von (L2ki)von der Form
y = yp + yh,
wobei yh jede beliebige Losung der zugehorigen homogenen Gleichung sein kann.
Beweis. wie ublich.
53

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Beispiel 3.1.4 a) y + ay + by = Aeiωt, A 6= 0, ω 6= 0(behandelt die Falle s(t) = A cos(ωt) und s(t) = A sin(ωt))
homogene Losung → s.o.
partikulare inhomogene Losung?Ansatz: yp(t) = Beiωt in die Gleichung einsetzen:
B(−ω2)eiωt +Baiωeiωt +Bbeiωt = Aeiωt
⇐⇒ B (−ω2 + aiω + b)︸ ︷︷ ︸=p(iω)
= A
wobei p(λ) = λ2 + aλ+ b ”charakteristisches Polynom“ der Dgl.
Fall 1: Wenn p(iω) 6= 0, dann ist B = Ap(iω) und
yp(t) ={
ReIm
}(A
p(iω)eiωt)
ist partikulare Losung.
Fall 2: Wenn p(iω) = 0, dann geht der Ansatz nicht.
Alternativansatz: yp(t) = Bteiωt
einsetzen:
y + ay + by = B(2iωeiωt + (iω)2teiωt) + aB(eiωt + iωteiωt) + bBteiωt!= Aeiωt
⇔ B[eiωtt
((iω)2 + aiω + b
)︸ ︷︷ ︸=p(iω)=0
+eiωt(2iω + a)]
= Aeiωt
⇔ B =A
2iω + a(2iω + a 6= 0, da a ∈ R und ω 6= 0)
Also yp(t) ={
ReIm
}(A
2iω + ateiωt
)Jeweils ”Re“ bei s(t) = cos(ωt) und ”Im“ bei s(t) = sin(ωt).
b) schwingende Feder
x: Auslenkung; k: Federkonstante; m: Masse
Auslenkung x erzeugt Ruckstellkraft −kx (Hooke’sches Gesetz)Reibung: −rx, r > 0Newton’sches Gesetz: mx = −rx− kx
x+r
mx+
k
mx = 0, x(0) = x0 6= 0, x(0) = 0
54

3.1 Ordnung 2
Diskriminante: D =r2
m2− 4
k
m
i) starke Reibung (oder schwache Feder):
D > 0⇔ r2 > 4km
=⇒ x(t) = C1eλ1t + C2e
λ2t
λ1,2 = − r
2m± 1
2
√r2
m2− 4
k
m
λ > 0: ”Ausleiern“, λ < 0: nur Ruckstellung auf Nullstellung
Anfangsbedingung:x(0) = C1 + C2
!= x0
x(0) = C1λ1 + C2λ2!= 0
}losen
ii) ”normaler“ Fall:r2 < 4km⇒ D < 0
=⇒ x(t) = e−r
2mt︸ ︷︷ ︸
Amplitudenimmt ab
(C1 cos
(12
√4k
m− r2
m2t
)+ C2 sin
(12
√4k
m− r2
m2t
))
reibungsfrei:
x(t) = C1 cos
(12
√4k
mt
)+ C2 sin
(12
√4k
mt
)
= C1 cos
(√k
mt
)+ C2 sin
(√k
mt
)
x(0) = C1!= x0
x(0) = C2
√k
m
!= 0
=⇒ x(t) = x0 cos
(√k
mt
)
c) Schwingkreis (Schaltkreis mit einer Spule der Induktivitat L, einem Kondensatormit Kapazitat C und einem Ohm’schen Widerstand R)
U : angelegte Spannung Q: Ladung
LQ+RQ+1CQ = U
alsoQ+
R
LQ+
1LC
Q =U
L
55

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
homogen: U = 0, Q(0) 6= 0 (Spannung wird abgeklemmt und Kurzschluss)
Diskriminante: D =R2
L2− 4LC
; keine Schwingung, wenn
D ≥ 0⇐⇒ R2
L2≥ 4LC
⇐⇒ R2 ≥ 4L
C
⇐⇒ R ≥ 2
√L
C
”Kriechfall“, Widerstand zu groß
sonst: Q(t) = e−R2Lt (C1 cosωt+ C2 sinωt) mit der Kreisfrequenz
ω =√−D2
=12
√4LC− R2
L2=
√1LC− R2
4L2
Dies ist die Eigenfrequenz des Schwingkreises.
Spezialfall ohne Ohm’schen Widerstand (supraleitender Schwingkreis)
Q(t) = C1 cos(ωt) + C2 sin(ωt), ω =
√1LC
Ein Ohm’scher Widerstand senkt also die Frequenz.Da fur die Schwingungsdauer T gilt (f : Frequenz)
ω = 2πf = 2π1T,
ergibt sich
T =2πω⇐⇒ T = 2π
√LC
Thomson-Gleichung
jetzt inhomogen, d.h. mit Spannungsquelle:
Q+R
LQ+
1LC
Q =U0
Lcos(ωt) ”erzwungene Schwingung“
charakteristisches Polynom:
p(λ) = λ2 +R
Lλ+
1LC
Sonderfall: p(iω) = 0, d.h. −ω2 + RL iω + 1
LC = 0 ⇔ R = 0 und ω2 = 1LC , also
im Fall ohne Ohm’schen Widerstand, wenn mit der Eigenfrequenz selbst angeregtwird (ω = ω). Dann ist folgendes eine partikulare Losung (s.o.):
Qp(t) = Re(
U0
L(2iω + 0)teiωt
)= Re
(U0
L2ω(−i)t(cosωt+ i sinωt)
)=
U0
2Lωt sinωt
56

3.2 n-te Ordnung
⇒ allgemeine inhomogene Losung:
Q(t) =U0
2Lωt sinωt+ C1 cosωt+ C2 sinωt
zum Beispiel:
Q(0) = 0⇒ C1 = 0
Q(0) = Q′0 ⇒ Q(t) =U0
2Lω(sinωt+ tω cosωt) + C2ω cosωt
∣∣∣∣t=0
= Q′0
⇒ C2ω = Q′0
⇒ Q(t) =(U0
2Lωt+
Q′0ω
)︸ ︷︷ ︸→∞ (t→∞)
U0>0
sinωt Resonanzkatastrophe
sonst (p(iω) 6= 0):
Qp(t) = Re
(U0
L(−ω2 + R
L iω + 1LC
)eiωt)
ohne Ohm’schen Widerstand ergibt dies
Qp(t) =U0
−Lω2 + 1C
cos ωt =U0
L(− ω2 +
1LC︸︷︷︸ω2
) cos ωt
Je weiter ω von der Eigenfrequenz entfernt ist, desto geringer ist die Amplitude.
3.2 n-te Ordnung
y(n) + an−1y(n−1) + . . .+ a1y
′ + a0y = 0 (Lnkh)
y(n) + an−1y(n−1) + . . .+ a1y
′ + a0y = s(x) (Lnki)
an−1, . . . , a0 ∈ R konstant
zunachst homogen:Offensichtlich gilt wieder...
Satz 3.2.1 (Superpositionsprinzip) Jede Linearkombination von Losungen der Gleichung(Lnkh) ist wieder eine Losung von (Lnkh).
Satz 3.2.2 y ist genau dann komplexwertige Losung von (Lnkh), wenn Re(y) und Im(y)reellwertige Losungen von (Lnkh) sind.
Außerdem gilt:
Satz 3.2.3 Ist y ∈ C(n)(I) (I ⊂ R Intervall) Losung von (Lnkh), so ist y ∈ C(∞)(I).
57

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Beweis. Induktion fur die Behauptung y ∈ C(k)(I) ∀k ≥ n.k = n Voraussetzung des Satzes.
k → k + 1 Gleichung: y(n) = −n−1∑j=0
ajy(j)
(k − n+ 1)-faches Ableiten liefert:
y(k+1) = −n−1∑j=0
ajy(j+k+1−n)
︸ ︷︷ ︸stetig nach I.V.
, wobei j + k + 1− n ∈ {k + 1− n, . . . , k}
existiert, da y(k) = −n−1∑j=0
ajy(j+k−n)
︸ ︷︷ ︸diff’bar nach I.V.
⇒ y ∈ C(k+1)
Defnition 3.2.4 Der Differentialoperator D : C(∞)(I) → C(∞)(I), I ⊂ R Intervall, seidefiniert durch:
Df := f ′, f ∈ C(∞)(I)
Satz 3.2.5 D ist linear.
Ist p das char. Polynom der Dgl., d.h.
p(λ) = λn +n−1∑j=0
ajλj
so lassen sich die Dgl’en formal schreiben als
p(D)y =
{0 (Lnkh)s(x) (Lnki)(
n−1∑j=0
ajy(j) + y(n) =
n−1∑j=0
ajDjy +Dny
)z.B. D3y = D(D(D(y))) = y(3) usw.
Satz 3.2.6 Sind λ1, . . . , λm ∈ C die Nullstellen des charakteristsichen Polynoms zu(Lnkh), jeweils mit Vielfachheiten ν1, . . . , νm, dann hat die allgemeine Losung von (Lnkh)die Form
y =m∑k=1
yk
wobei jeweils yk die allgemeine Losung von (D − λk)νkyk = 0 ist.
Beweis. Das charakteristische Polynom hat also die Form
p(λ) =m∏j=1
(λ− λj)νj (1)
58

3.2 n-te Ordnung
mitm∑j=1
νj = n. Mit Methoden der Partialbruchzerlegung kann man 1p(λ) umformen zu
1p(λ)
=m∑k=1
qk(λ)(λ− λk)νk
(2)
mit Polynomen q1, . . . , qm. Multiplikation von (2) mit (1) ergibt:
1 =m∑k=1
qk(λ)(λ− λk)νk
m∏j=1
(λ− λj)νj =m∑k=1
qk(λ)m∏j=1j 6=k
(λ− λj)νj
︸ ︷︷ ︸=:pk(λ)
(3)
In diese Zerlegung der Eins setzen wir den Differentialoperator D ein:
Id =m∑k=1
qk(D)pk(D)
Somit gilt fur alle y ∈ C(∞)(I):
y =m∑k=1
[qk(D)pk(D)
]y︸ ︷︷ ︸
=:yk
speziell fur Losungen y von (Lnkh), d.h. wenn p(D)y = 0, erhalt man:
(D − λk)νkyk = (D − λk)νkqk(D)pk(D)y= qk(D)(D − λk)νkpk(D)y = 0,
da
(D − λk)νkpk(D)(3)=
m∏j=1
(D − λj)νj = p(D)
Wir haben bisher gezeigt, dass jede Losung y von (Lnkh) als y =m∑k=1
yk mit
(D − λk)νkyk = 0 geschrieben werden kann.
Fur die Umkehrung betrachten wir
p(D)yk(1)=
m∏j=1
(D − λj)νjyk(3)= pk(D) (D − λk)νkyk︸ ︷︷ ︸
=0
= 0
Wegen des Superpositionsprinzips gilt damit stets
p(D)y = p(D)m∑k=1
yk = 0
Wie lost man also nun (D − λ)νy = 0 mit λ ∈ C, ν ∈ N?
59

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Lemma 3.2.7 Die Funktion Eα : R→ C, t 7→ eαt fur festes α ∈ C erfullt:
Dm(Eαf) = Eα(D + α)mf
∀f ∈ C(∞)(I), I ⊂ R Intervall, ∀m ∈ N0.
Beweis. Mit der Leibniz-Regel und dem Binomischen Lehrsatz erhalt man
Dm(Eαf) =m∑j=0
(mj
)E(j)α f (m−j) =
m∑j=0
(mj
)αjEαD
m−jf = Eα(D + α)mf
Lemma 3.2.8 y ∈ C(∞)(I) (I ⊂ R Intervall) ist Losung von (D − λ)νy = 0 genau dann,wenn
Dν(E−λy) = 0
Beweis. Mit der Leibniz-Regel und dem Binomischen Lehrsatz erhalt man
(D − λ)νy = 0⇐⇒ E−λ(D − λ)νy = 0
Lemma⇐⇒3.2.7.
Dν(E−λy) = 0
Lemma 3.2.9 Dνf = 0, ν ∈ N, wird genau von den Polynomen vom Grad ≤ ν − 1gelost.
Wir fassen zusammen:
Satz 3.2.10 Sind λ1, λ2, . . . , λm die Nullstellen des charakteristischen Polynoms zu (Lnkh),jeweils mit den Vielfachheiten ν1, ν2, . . . , νm, dann ist dieallgemeine komplexeLosung von(Lnkh) von der Form
y =m∑j=1
yj
wobei yj(x) = Pj(x)eλjx mit beliebigen Polynomen Pj (mit komplexen Koeffizienten)vom Grad ≤ νj − 1. Die Losungen existieren auf ganz R.
Wie kommen wir nun zu den reellen Losungen?Ein Problem tritt nur auf, wenn λk ∈ C\R ist. Da die Koeffizienten a, b des charak-teristischen Polynoms reellwertig sind, sind die imaginaren Nullstellen von der Formξ ± iη, ξ, η ∈ R, wobei die Vielfachheiten von ζ := ξ + iη und ζ = ξ − iη gleich sind.Sind λ1 = ζ und λ2 = ζ, so ist ihr Anteil an der allgemeinen Losung (mit beliebigenPolynomen P1 und P2 vom Grad < ν1 = ν2)
P1(x)eλ1x + P2(x)eλ2x
= P1(x)eζx + P2(x)eζx
= eξx[P1(x)eiηx + P2(x)e−iηx
]= eξx [P1(x)(cos ηx+ i sin ηx) + P2(x)(cos(−ηx)− i sin ηx)]
= (P1(x) + P2(x))eξx cos ηx+ i(P1(x)− P2(x))eξx sin ηx
= P1(x)eξx cos ηx+ iP2(x)eξx sin ηx
60

3.2 n-te Ordnung
mit beliebigen Polynomen P1 und P2 vom Grad < ν1 = ν2.
Satz 3.2.11 Das charakteristische Polynom zu (Lnkh) habe genau die reellen Nullstellenλ1, . . . , λr mit Vielfachheiten ν1, . . . , νr, und die komplexen, nichtreellen Nullstellenpaareα1 ± iβ1, . . . , αm ± iβm mit Vielfachheiten µ1, . . . , µm (pro Nullstelle, also entweder ”+“oder ”-“). Dann ist die allgemeine reelle Losung von (Lnkh) gegeben durch
y(x) =r∑j=1
Pj(x)eλjx +m∑k=1
(Qk(x) cos(βkx) +Rk(x) sin(βkx)
)eαkx
mit beliebigen reellen Polynomen Pj , Qk, Rk, wobei degPj ≤ νj − 1, degQk, degRk ≤µk − 1.
Beispiel 3.2.12 a) y′′ + ay′ + b = 0 (siehe oben)charakteristisches Polynom
p(λ) = λ2 + aλ+ b!= 0
⇐⇒ λ1,2 = −a2±√a2
4− b =
12
−a±√a2 − 4b︸ ︷︷ ︸=D
1. Fall D > 0 (reelle Nullstellen):
λ1,2 =12
(−a±
√D)
mit ν1 = ν2 = 1
⇒ y(x) = P1eλ1x + P2e
λ2x
wobei P1, P2 Polynome vom Grad 0, also konstant, sind.
2. Fall D = 0 (eine reelle Nullstelle)λ = −a
2 mit Vielfachheit ν = 2⇒ y(x) = (C1 + C2x)eλx mit beliebigen C1, C2 ∈ R.
3. Fall D < 0 (zwei nicht-reelle Nullstellen) komplexes Nullstellenpaar
− a
2± i√−D2
, α = −a2, β =
√−D2
=⇒ y(x) =(Q cos(βx) +R sin(βx)
)eαx
mit beliebigen Konstanten Q,R ∈ R. (vgl. Satz 3.1.2.)
b) y(3) − 2y′′ + y′ = 0charakteristisches Polynom
p(λ) = λ3 − 2λ2 + λ
= λ(λ2 − 2λ+ 1)
= (λ− 0)(λ− 1)2
⇒ allgemeine Losung
y(x) = C1e0·x + (C2 + C3x)e1·x
= C1 + (C2 + C3x)ex
61

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Wenden wir uns nun dem AWP zu. Die Anzahl der Freiheitsgrade ist durch die Anzahlder Koeffizienten in den Polynomen gegeben. Man erhalt bei der komplexen Losung
m∑j=1
νj = n
und bei der reellen Losungr∑j=1
νj + 2m∑k=1
µk = n
zu bestimmende Koeffizienten in C bzw. in R.
Satz 3.2.13 Das AWP
y(n) +n−1∑j=0
ajy(j) = 0
y(x0) = y0, y′(x0) = y′0, . . . , y
(n−1)(x0) = y(n−1)0
hat fur jede Wahl von x0 ∈ R und y0, y′0, . . . , y
(n−1)0 ∈ R (C) genau eine reelle (komplexe)
Losung.
Beweis. Wegen der bekannten Form der allgemeinen Losung sind alle Losungen analy-tisch (holomorph), d.h. in eine Potenzreihe entwickelbar.
y(x) =∞∑k=0
y(k)(x0)k!
(x− x0)k ∀x ∈ R (sogar ∀x ∈ C)
=n−1∑k=0
y(k)(x0)k!
(x− x0)k︸ ︷︷ ︸durch die Anfangs-
bedingung festgelegt
+∞∑k=n
y(k)(x0)k!
(x− x0)k
Wir haben bereits zuvor gezeigt, dass aus der Dgl. folgt:
y(n+m) = −n−1∑j=0
ajy(j+m) ∀m ∈ N0 (∗)
Daher legen y(x0), . . . , y(n−1)(x0) den Wert y(n)(x0) fest, das wiederum legt y(n+1)(x0)fest und (induktiv) weiter: y(x0), . . . , y(n−1)(x0) legen y(n+m)(x0) ∀m ∈ N0 und damitdie Funktion y, d.h. ihre Potenzreihe, fest.Daran sieht man, dass es hochstens eine Losung geben kann. (Damit ist der Rest vonSatz 3.1.2. auch bewiesen.) Somit ist nur noch die Existenz zu zeigen.Aus y0, . . . , y
(n−1)0 kann man mittels (∗) eine rekursive Folge (ck) definieren:
c0 := y0, . . . , cn−1 := y(n−1)0
cn+m := −n−1∑j=0
ajcj+m
Sei M := maxj=0,...,n−1
|cj |, A := max(|a0|, . . . , |an−1|, 1n). Dann ist |ck| ≤ (nA)kM ∀k ∈ N0
62

3.2 n-te Ordnung
Induktion: k < n : |ck| ≤M(nA)k (da 1n≤ A⇒ 1 ≤ nA)
k → k + 1 : (k + 1 ≥ n) Sei k + 1 = n+m⇔ m = k + 1− n
⇒ |ck+1| =
˛˛n−1Xj=0
ajcj+m
˛˛ ≤
n−1Xj=0
|aj ||{z}≤A
|cj+m|| {z }≤k
I.V.
≤n−1Xj=0
A(nA)j+mM ≤ nkAk+1M
n−1Xj=0
1 = (nA)k+1M
Damit ist die Reihe∞∑k=0
(nA)kMk!
(x − x0)k = M exp(nA(x − x0)) eine konvergente Ma-
jorante der Potenzreihe∞∑k=0
ckk!
(x− x0)k fur alle x ∈ R.
⇒ y(x) :=∞∑k=0
ckk!
(x− x0)k definiert eine C(∞)-Funktion auf ganz R, die somit beliebig
oft gliedweise differenzierbar ist. Wegen der Konstruktion der ck erfullt damit y die Dgl.und die Anfangsbedingungen.
und nun der inhomogene Fall:Auch hier gilt wieder, wie bei allen linearen Gleichungen:
Satz 3.2.14 Die allgemeine Losung von (Lnki) hat die Form:
part. inh. Lsg. + allg. hom. Lsg.
Wie erhalt man nun eine partikulare Losung? Variation der Konstanten?Wir nehmen aus dem homogenen Fall die Basis:{
eλjx, xeλjx, . . . , xνj−1eλjx}rj=1
∪{
cos(βkx), x cos(βkx), . . . , xµk−1 cos(βkx)}mk=1
∪{
sin(βkx), x sin(βkx), . . . , xµk−1 sin(βkx)}mk=1
”kanonische Integralbasis der homogenen Dgl.“ (insgesamt n Funktionen)
Satz 3.2.15 Gegeben sei (Lnki) mit s ∈ C(I), I ⊂ R Intervall.
a) Man erhalt stets eine partikulare Losung auf I durch Variation der Konstanten,d.h. den Ansatz
y(x) =n∑j=1
Cj(x)yj(x)
wobei {y1, . . . , yn} die kanonische Integralbasis der homogenen Gleichung darstellt.
b) In Kombination mit den Anfangsbedingungen
y(x0) = y0, y′(x0) = y′0, . . . , y
(n−1)(x0) = y(n−1)0
fur beliebig gewahlte x0 ∈ I und y0, y′0, . . . , y
(n−1) ∈ R, gibt es genau eine Losungauf I.
63

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Beweis. ohne
Beispiel 3.2.16 y′′ + 4y′ = cos(2x), y(0) = 0, y′(0) = 1
• homogene Gleichungcharakteristisches Polynom:
p(λ) = λ2 + 4λ = λ(λ+ 4) != 0⇔ λ = 0 ∨ λ = −4
(jeweils Vielfachheit 1)=⇒ allgemeine homogene Losung: y(x) = C1e
0·x + C2e−4x = C1 + C2e
−4x
• partikulare inhomogene Losung (Variation der Konstanten)Ansatz:
y(x) = C1(x) + C2(x)e−4x (1)
Um die Auswirkungen der Produktregel zu lindern, versuchen wir folgenden An-satz:
C ′1(x) + C ′2(x)e−4x = 0 (a)
=⇒ y′(x) = −4C2(x)e−4x (2)
=⇒ y′′(x) = −4C ′2(x)e−4x + 16C2(x)e−4x (3)((1),
)(2) und (3) in die Gleichung:
y′′ + 4y′ = −4C ′2(x)e−4x + 16C2(x)e−4x − 16C2(x)e−4x
= −4C ′2(x)e−4x != cos(2x)
sowie (a): C ′1(x) + C ′2(x)e−4x = 0LGS fur C ′1 und C ′2 mit eindeutiger Losung:
C ′2(x) = −14
cos(2x)e4x
C ′1(x) =14
cos(2x)
z.B. C2(x) = − 140
(2 cos(2x) + sin(2x)) e4x, C1(x) =18
sin(2x)
(1)=⇒ partikulare inhomogene Losung
yp(x) =18
sin(2x)− 140
(2 cos(2x) + sin(2x))
=110
sin(2x)− 120
cos(2x)
• allgemeine inhomogene Losung
y(x) =110
sin(2x)− 120
cos(2x) + C1 + C2e−4x, C1, C2 ∈ R bel.
64

3.2 n-te Ordnung
• Losung des AWP y′(x) = 15 cos(2x) + 1
10 sin(2x)− 4C2e−4x
0 = 0− 120
+ C1 + C2 (I)
1 =15
+ 0− 4C2 ⇐⇒45
= −4C2 ⇐⇒ −15
= C2 (II)
(II) in (I):120
= C1 −15⇐⇒ C1 =
14
Der ”Trick“ der hier bei der Variation der Konstanten im Beispiel angewandt wurde,funktioniert immer:
Der Ansatz y(x) =n∑k=1
ck(x)yk(x) fuhrt zu
y′(x) =n∑k=1
ck(x)y′k(x) +n∑k=1
c′k(x)yk(x)
Setzt man nun (das ist der ”Trick“)
n∑k=1
c′k(x)yk(x) = 0,
so dass
y′′(x) =n∑k=1
ck(x)y′′k(x) +n∑k=1
c′k(x)y′k(x)
und macht dies immer wieder, d.h.
n∑k=1
c′k(x)y′k(x) = 0
usw. bis einschließlich zur (n− 1)-ten Ableitung von y, so erhalt man die Gleichungen:
y(j)(x) =n∑k=1
ck(x)y(j)k (x), j = 0, . . . , n− 1
n∑k=1
c′k(x)y(j−1)k (x) = 0, j = 1, . . . , n− 1
y(n)(x) =n∑k=1
ck(x)y(n)k (x) +
n∑k=1
c′k(x)y(n−1)k (x)
65

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Setzt man das in die Dgl. ein, so ergibt sich:
y(n)(x) +n−1∑j=0
ajy(j)(x) =
n∑k=1
ck(x)y(n)k (x) +
n∑k=1
c′k(x)y(n−1)k (x)
+n−1∑j=0
aj
n∑k=1
ck(x)y(j)k (x) != s(x)
⇐⇒n∑k=1
ck(x)
[y
(n)k (x) +
n−1∑j=0
ajy(j)k (x)︸ ︷︷ ︸
=0homogene Gleichung
]+
n∑k=1
c′k(x)y(n−1)k (x) = s(x)
⇐⇒n∑k=1
c′k(x)y(n−1)k (x) = s(x)
Dies ergibt:n∑k=1
c′k(x)y(j−1)k (x) =
{0 , j = 1, . . . , n− 1s(x) , j = n
homogen: y(x) =Xk
ckyk(x)
y(j)(x0) =Xk
cky(j)k (x0) (j = 0, . . . , n− 1)
Die ist ein LGS fur (c′1(x), . . . , c′n(x)) mit der gleichen Matrix wie beim homogenen AWP.Wir wissen, dass diese regular ist.Somit ist das LGS eindeutig losbar. Also findet man stets geeignete c′1(x), . . . , c′n(x) unddamit auch c1(x), . . . , cn(x).
Satz 3.2.17 Ist (Lnki) von der Form
p(D)y =m∑j=1
sj (∗)
und yk (k = 1, . . . ,m) Losung von p(D)yk = sk, so ist y =m∑k=1
yk Losung von (∗).
Beweis. folgt direkt aus der Linearitat von p(D).
Uberlagerung von angeregten Schwingungen (Radio, TV)
3.3 Laplacetransformation
Voruberlegung: Sei f : R+0 → R lokal integrierbar, d.h. auf jedem kompakten Intervall
⊂ R+0 integrierbar, so dass mindestens ein s ∈ R existiert, so dass∫ ∞
0e−stf(t)dt
konvergiert. Aus Monotoniegrunden gibt es dann ein σ ∈ R, so dass∫ ∞0
e−stf(t)dt
66

3.3 Laplacetransformation
entweder genau fur alle s ∈ [σ,+∞) oder genau fur alle s ∈ (σ,+∞) konvergiert.
Defnition 3.3.1 Fur jede lokal integrierbare Funktion f : R+0 → R, fur die ein s ∈ R
existiert, so dass ∫ ∞0
e−stf(t)dt (∗)
konvergiert, nennt man
• Kf :={s ∈ R
∣∣∣∣ ∫ ∞0
e−stf(t)dt konvergiert}
den Konvergenzbereich von (∗),
• σf := int(Kf ) die Konvergenzabszisse von (∗),
• (Lf)(s) :=∫ ∞
0e−stf(t)dt, s ∈ Kf , die Laplacetransformierte von f . (andere
Bezeichnung: L{f(t)})Die Abbildung f 7→ Lf heißt L-Transformation. Man nennt f die Originalfunktion undLf die Bildfunktion.
Satz 3.3.2 Die L-Transformierte ist linear.
Die Laplace-Transformation hilft, Differentialgleichungen zu losen, indem sie sie in alge-braische Gleichungen umwandelt, wie der folgende Satz zeigt:
Satz 3.3.3 (Differentiationssatz)(L(f (k)
))(s) = sk(Lf)(s)−
k−1∑j=0
sjf (k−1−j)(0)
fur alle s ∈k⋂j=0
Kf (j) , k ∈ N0
Beweis. durch Induktionk = 0
L(f (0)
)(s) = s0 (Lf) (s)
k → k + 1
L(f (k+1)
)(s) =
∫ ∞0
e−stf (k+1)(t)dt
= e−stf (k)(t)∣∣∣t→∞t=0
−∫ ∞
0−se−stf (k)(t)dt
= −f (k)(0) + s(L(f (k)
))(s)
I.V.= −f (k)(0) + sk+1(Lf)(s)−k−1∑j=0
sj+1f (k−1−j)(0)
= −f (k)(0)−k∑j=1
sjf (k−j)(0) + sk+1(Lf)(s)
= −k∑j=0
sjf (k−j)(0) + sk+1(Lf)(s)
67
3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Satz 3.3.4 Der Nullraum der Laplace-Transformation ist gegeben durch
kerL :={f : R+
0 → R∣∣∣∣ f lokal integrierbar und
∫ τ
0f(t)dt = 0 ∀τ > 0
}Beweis. zur Ubung.
Korollar 3.3.5 Betrachtet man die Laplace-Transformation nur fur stetige Funktionen,fur die sie definiert ist, so ist sie invertierbar. Die Inverse wird mit L−1 bezeichnet. Sieist (wie jede Inverse einer linearen Abbildung) linear.
Beweis. ∫ τ
0f(t)dt = 0 ∀τ > 0, f stetig ⇐⇒ f ≡ 0
⇐ trivial.⇒ Beweisvariante 1: Angenommen es gibt ein x, wobei f(x) 6= 0. O.B.d.A. f(x) > 0.
f stetig=⇒ ∃ε > 0 : f(ξ) > 0 ∀ξ ∈ [x− ε, x+ ε] (x− ε ≥ 0)
=⇒ 0 =∫ x+ε
0f(t) dt =
∫ x−ε
0f(t) dt︸ ︷︷ ︸
=0nach Vor.
+∫ x+ε
x−εf(t) dt
=⇒∫ x+ε
x−εf(t)︸︷︷︸>0
dt = 0
d.h. f ≡ 0.Beweisvariante 2: HDI (f stetig)
f(τ) =d
dτ
∫ τ
0f(t)dt︸ ︷︷ ︸=0
= 0
Beispiel 3.3.6 a) f(t) = 1 ∀t
∫ ∞0
e−st · 1 dt = −1se−st
∣∣∣∣t→∞t=0
=
{1s , s > 0+∞ , s < 0∫ ∞
0e0·t · 1 dt = +∞
=⇒ Kf = R+, σf = 0
L{1} =1s
b) L{eat} = 1s−a , s > a (siehe Ubung)
68

3.3 Laplacetransformation
c) L{cosh(at)} = 12L{e
at}+ 12L{e
−at} = 12
1s−a + 1
21s+a = 1
2s+a+(s−a)s2−a2 = s
s2−a2
fur s > max{−a, a} (⇔ s > |a|)Mit dem Differentiationssatz:
L{d
dtcosh(at)
}= sL{cosh(at)} − s0 d
0
dt0(cosh(at))
∣∣∣∣∣t=0
=s2
s2 − a2− cosh(0)︸ ︷︷ ︸
=1
=a2
s2 − a2, s > |a|
=⇒ L{sinh(at)} =1aL{d
dtcosh(at)
}=
a
s2 − a2, s > |a|
Vergleich:
L{d
dtcosh(at)
}= aL{sinh(at)}
=a
2L{eat} − a
2L{e−at}
=a
21
s− a− a
21
s+ a
=a
2s+ a− (s− a)
s2 − a2
=a
22a
s2 − a2=
a2
s2 − a2
s > max{−a, a} = |a|
d) Heaviside-Funktion
H(t) =
{0 , t < 01 , t ≥ 0
allgemeine Sprungstelle bei t = a mit H(t− a) (wg. R+0 als Def’bereich nur a ≥ 0
sinnvoll)
L{H(t− a)} =∫ ∞
0e−stH(t− a)dt =
∫ ∞a
e−stdt = −1se−st
∣∣∣∣t→∞t=a
=1se−as
fur s > 0. (Kf = R+, σf = 0)
Satz 3.3.7 (Ahnlichkeitssatz) (i) L{f(at)}(s) =1aL{f(t)}
(sa
)∀a > 0
(ii) L−1{F(sa
)}(t) = aL−1{F (s)}(at) ∀a > 0
69

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Beweis. (i)∫ ∞
0e−stf(at) dt τ=at=
∫ ∞0
e−sτa f(τ)
1adτ =
1a
∫ ∞0
e−saτf(τ) dτ
(ii) folgt aus (i)
Satz 3.3.8 (Dampfungssatz) (i) L{eatf(t)
}(s) = L{f(t)}(s− a)
(ii) L−1{F (s− a)}(t) = eatL−1{F (s)}(t)
Beweis. (i)∫ ∞
0e−steatf(t) dt =
∫ ∞0
e−(s−a)tf(t) dt
(ii) folgt aus (i)
Satz 3.3.9 (Verschiebungssatz) (i) L{f(t− a)H(t− a)}(s) = e−asL{f(t)}(s) ∀a > 0
(ii) L−1{e−asF (s)
}(t) = L−1{F (s)}(t− a)H(t− a) ∀a > 0
(H: Heaviside-Funktion)
Beweis. ∫ ∞0
e−stf(t− a)H(t− a) dt =∫ ∞a
e−stf(t− a) dt
τ=t−a=∫ ∞
0e−s(τ+a)f(τ) dτ = e−as
∫ ∞0
e−sτf(τ) dτ
Defnition 3.3.10 Seien f, g : R+0 → R lokal integrierbar. Dann heißt f ∗ g : R+
0 → R,definiert durch
(f ∗ g)(t) :=∫ t
0f(τ)g(t− τ)dτ
Faltung von f und g.(Die ist nicht die ”ubliche“ Faltung!)
Satz 3.3.11 (Faltungssatz) (i) L(f ∗ g) = (Lf)(Lg)
(ii) L−1(FG) =(L−1F
)∗(F1G
)Beweis. ohne
Es gibt in den Standard-Nachschlagewerken, z.B. Bronstein, Semendjajew Magnus, Oberhettinger (, Soni)
Tabellen von Laplacetransformierten.
Mit den obigen Satzen kann man daraus weitere Formeln ableiten. Hier ist eine kleineAuswahl:
70

3.3 Laplacetransformation
f(t) L{f(t)}(s)
1 = H(t− 0)1s
eat1
s− a
H(t− a) e−as1s
te−at1
(s+ a)2
f(t) L{f(t)}(s)
−e−at − e−bt
a− b(a 6= b)
1(s+ a)(s+ b)
sin(ωt)ω
s2 + ω2
cos(ωt)s
s2 + ω2
(1− αt)e−αt s
(s+ α)2
Damit ist z.B. nach dem Dampfungssatz
L{eat cosωt
}(s) =
s− a(s− a)2 + ω2
usw.
Der Nutzen fur (Lnki) ist wie folgt: Durch Anwendung der Laplace-Transformation aufdas AWP
y(n) +n−1∑j=0
ajy(j) = s(x), y(0) = y0, . . . , y
(n−1)(0) = y(n−1)0
erhalt man wegen der Linearitat von L
L(y(n)
)+n−1∑j=0
ajL(y(j))
= L(s)
Mit dem Differentiationssatz (Satz 3.3.3.) wird hieraus eine algebraische Gleichung furL(y). Erhalt man hieraus eine Losung L(y) und kann hiervon die inverse Transformierteberechnen, so erhalt man einen Kandidaten. Eine anschließende Probe ist unerlasslich!
Beispiel 3.3.12y′′ − 6y′ + 9y = 0, y(0) = 1, y′(0) = 0
Laplace-TransformationL(y′′)− 6L(y′) + 9L(y) = 0
Setze Y := L(y). Mit dem Differentiationssatz erhalten wir
s2Y (s)− s0 · 0− s1 · 1︸ ︷︷ ︸L(y′′)(s)
−6 (s1Y (s)− s0 · 1)︸ ︷︷ ︸L(y′)(s)
+9Y (s) = 0
=⇒ Y (s) =s− 6
s2 − 6s+ 9=
s− 6(s− 3)2
=s
(s− 3)2− 6
(s− 3)2
=⇒ y(t) = (1 + 3t)e3t − 6te3t = (1− 3t)e3t ist Kandidat.
71

3 Lineare Differentialgleichungen hoherer Ordnung mit konstanten Koeffizienten
Probe: y(0) = 1
y′(t) = −3e3t + (1− 3t) · 3e3t = e3t(−9t)y′(0) = 0
y′′(t) = 3e3t(−9t)− 9e3t = (−27t− 9)e3t
Einsetzen in die Differentialgleichung:
y′′ + 6y′ + 9y = e3t(−27t− 9 + 54t+ 9− 27t) = e3t · 0 = 0
=⇒ y(t) = (1− 3t)e3t ist (wegen der Eindeutigkeit) die Losung des AWP.
72
4 Lineare Differentialgleichungen hoherer Ordnungmit variablen Koeffizienten
4.1 Generelles
Satz 4.1.1 (Existenz- und Eindeutigkeitssatz) Gegeben sei die Differentialgleichung
y(n) +n−1∑j=0
aj(x)y(j) = s(x) (Lnvi)
mit den Anfangsbedingungen
y(x0) = y0, y′(x0) = y′0, . . . , y
(n−1)(x0) = y(n−1)0 (Abn)
fur bel. gewahlte x0 ∈ I (I ⊂ R Intervall), y0, ..., y(n−1)0 ∈ R. Sind s, a0, ..., an−1 stetig
auf I, dann hat das AWP genau eine Losung, die auf ganz I existiert.
Beweis. wieder uber eine Integralgleichung und funktionalanalytische Betrachtungen.
Offensichtlich gilt wieder:
Satz 4.1.2 (Superpositionsprinzip) Jede Linearkombination von Losungen von
y(n) +n−1∑j=0
aj(x)y(j) = 0 (Lnvh)
lost (Lnvh).
Satz 4.1.3 Die allgemeine Losung von (Lnvi) hat die Form
partikulare inhomogene Losung + allgemeine homogene Losung
Defnition 4.1.4 Sind v1, ..., vn die Losung von (Lnvh) auf dem Intervall I, so dass dieWronski-Determinante
W (v1, ..., vn) :=
∣∣∣∣∣∣∣∣∣v1 v2 . . . vnv′1 v′2 . . . v′n...
.... . .
...v
(n−1)1 v
(n−1)2 . . . v
(n−1)n
∣∣∣∣∣∣∣∣∣an mindestens einer Stelle x0 ∈ I von Null verschieden ist, so heißt {v1, ..., vn} Integral-basis (Fundamentalsystem, Hauptsystem von Losungen) von (Lnvh).
Satz 4.1.5 Sind die Funktionen a0, ..., an−1 in (Lnvh) stetig auf dem Intervall I, sobesitzt (Lnvh) ein Fundamentalsystem von Losungen. Jede Losung von (Lnvh) ist injedem Fundamentalsystem eindeutig als Linearkombination darstellbar.
73

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
Beweis. 1. Sei x0 ∈ I. Nach Satz 4.1.1. existieren (eindeutige) Funktionen v1, ..., vn,die (Lnvh) losen und die Anfangsbedingungen v
(k)j (x0) = δj−1,k ∀j = 1, ..., n ∀k =
0, ..., n− 1 erfullen. Die Wronski-Determinante bei x0 ist damit die Determinanteder Einheitsmatrix und somit 1 6= 0.⇒ {v1, ..., vn} ist Fundamentalsystem (per definitionem).
2. Sei nun {v1, ..., vn} irgendein Fundamentalsystem und x0 ∈ I eine Stelle, wo dieWronski-Determinante 6= 0 ist. Sei ferner y eine bel. Losung von (Lnvh). Wirsuchen
η :=n∑j=1
Cjvj
(d.h. wir suchen C1, ..., Cn), so dass
η(k)(x0) = y(k)(x0) ∀k = 0, ..., n− 1
Beachte: Wegen des Superpositionsprinzips ist η eine Losung von (Lnvh).
Die Anfangsbedingungen fur η fuhren zu einem LGS:
n∑j=1
Cj v(k)j (x0)︸ ︷︷ ︸
Wronski-Matrix beix0, regular
!= y(k)(x0) ∀k = 0, ..., n− 1
⇒ C1, ..., Cn existieren eindeutig.
Da es nur eine Losung des AWPs geben kann, muss y = η sein.
Satz 4.1.6 Seien v1, ..., vn beliebige Losungen von (Lnvh) auf dem Intervall I, wobeia0, ..., an−1 stetig auf I sind. Dann gilt fur jedes beliebige x0 ∈ I
W (v1, ..., vn)(x0) = 0 ⇐⇒ W (v1, ..., vn)(x) = 0 ∀x ∈ I
(Somit ist die Wronski-Determinante eines Fundamentalsystems uberall 6= 0.)
Beweis. ⇐ trivial.⇒ Sei W (v1, ..., vn)(x0) = 0.
⇒ ∃(C1, ..., Cn) 6= (0, ..., 0) :n∑j=1
Cj v(k)j (x0)︸ ︷︷ ︸
singulareMatrix
= 0 ∀k = 0, ..., n− 1
Damit ist
y :=n∑j=1
Cjvj
eine Losung von (Lnvh), nach dem Superpositionsprinzip, mit den Anfangsbedingungeny(k)(x0) = 0 ∀k = 0, ..., n − 1. Wegen Satz 4.1.1. (Eindeutigkeit der Losung) ist damit
74

4.2 Die Euler’sche Differentialgleichung
y ≡ 0, d.h.
n∑j=1
Cjvj(x) = 0 ∀x ∈ I
ableiten=⇒n∑j=1
Cjv(k)j (x) = 0 ∀x ∈ I ∀k = 0, ..., n− 1
mit (C1, ..., Cn) 6= (0, ..., 0)=⇒ W (v1, ..., vn)(x) = 0 ∀x ∈ I
Korollar 4.1.7 Seien a0, ..., an−1 in (Lnvh) stetig auf dem Intervall I und v1, ..., vn seienn Losungen von (Lnvh) auf I. Dann gilt:
v1, .., vn sind linear unabhangig⇐⇒ W (v1, ..., vn)(x) 6= 0 ∀x ∈ I⇐⇒ v1, ..., vn Fundamentalsystem
4.2 Die Euler’sche Differentialgleichung
n∑j=0
ajxjy(j) = s(x), x > 0, ak ∈ R ∀k, an 6= 0 (ED)
Satz 4.2.1 Die allg. Lsg. y ∈ C(n)(R+) von (ED) ist von der Form
y(x) = u(lnx)
wobei u die allg. Lsg. von
n∑k=0
k! ak
(D
k
)u = s(et) (ED*)
ist.Ist s ∈ C(∞)(R+) (insb. im homogenen Fall), so sind alle Losungen in C(∞)(R+). Hierbeiist (
D
k
)=
1k!D(D − 1)...(D − k + 1)
und D der Differentialoperator.
Beachte: (ED*) ist vom Typ (Lnki). Die allg. Losung kann also im homogenen Fallexplizit angegeben werden.
Beweis. 1. Sei y Losung von (ED). Wegen x > 0 kann man t := lnx mit u(t) =y(x) = y(et) schreiben.
75

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
a) y ∈ C(∞) (⇔ u ∈ C(∞)) analog zum Fall konstanter Koeffizienten.
Dk
n∑j=0
ajxjy(j)
= s(k)Linearitat
⇐⇒von D
n∑j=0
ajDk(xjy(j)) = s(k)
Leibniz⇐⇒ an
k∑l=0
(k
l
)(Dlxn)y(n+k−l) +
n−1∑j=0
ajDk(xjy(j)) = s(k)
⇐⇒ anxny(n+k) = s(k) − an
k∑l=1
(k
l
)(Dlxn)y(n+k−l) −
n−1∑j=0
ajDk(xjy(j))︸ ︷︷ ︸
Terme in y(0),...,y(n+k−1) mit stet. Koeff.
b) y′ = dudt ·
dtdx = (Du) 1
x = (Du)e−t (mit t = lnx, dtdx = 1
x = 1et = e−t)
=⇒ y′′ =d
dt
((Du)e−t
)e−t
= (D2u)e−t +((Du)(−e−t)
)e−t
= e−2t(D2u−Du
)︸ ︷︷ ︸D(D−1)u
Vermutung: y(k)(t) = e−ktk!(D
k
)u(t)
Beweis der Vermutung durch vollstandige Induktion:k → k + 1:
y(k+1) I.V.=d
dt
(e−ktk!
(D
k
)u
)e−t
= −ke−ktk![(D
k
)u
]e−t + e−ktk!
[D
(D
k
)u
]e−t
= e−(k+1)tk!(−k(D
k
)u+D
(D
k
)u
)= e−(k+1)tk!
(D
k
)(D − k)u
= e−(k+1)tD(D − 1) . . . (D − (k + 1)− 1)u
= e−(k+1)t(k + 1)!(
D
k + 1
)u
Einsetzen in (ED) ergibt:
n∑j=0
ajejte−jtj!
(D
j
)u = s
(et)
⇐⇒n∑j=0
ajj!(D
j
)u = s
(et)
⇐⇒ (ED*)
76

4.3 Potenzreihenansatz
2. Sei u ∈ C(n)(R+) Losung von (ED*), dann gilt u ∈ C(∞)(R+) (mit Satz 2.3.2. undden Ubungen).
wie oben: s(et) =n∑j=0
ajy(j)xj =
n∑j=0
ajj!(D
j
)u
Beispiel 4.2.2 x2y′′ − 7xy′ + 15y = x, y(1) = y′(1) = 0
(ED*): a22!(D
2
)u+ a11!
(D
1
)u+ a00!
(D
0
)u = et
⇐⇒ 1 ·D(D − 1)u+ (−7)Du+ 15u = et
⇐⇒ u− u− 7u+ 15u = et
⇐⇒ u− 8u+ 15u = et
homogen: charakteristisches Polynom
p(λ) = λ2 − 8λ+ 15 != 0⇐⇒ λ1,2 = 4±√
16− 15⇐⇒ λ ∈ {3; 5} (Vielfachheit je 1)
⇒ allgemeine homogene Losung: u(t) = C1e3t + C2e
5t
inhomogen: partikulare Losung (siehe Aufgabe 25a)
up(t) =1
5− 3
(e5t
∫ t
0e−5τeτ dτ − e3t
∫ t
0e−3τeτ dτ
)=
12
(e5t 1−4(e−4t − 1
)− e3t 1
−2(e−2t − 1
))=
12
(14et +
14e5t − 1
2e3t)
=18et +
18e5t − 1
4e3t
allgemeine inhomogene Losung:
u(t) =18et +
18e5t − 1
4e3t + C1e
3t + C2e5t, C1, C2 ∈ R bel.
=⇒ u(t) =18et + C1e
3t + C2e5t
⇒ allgemeine Losung der Euler’schen Differentialgleichung
y(x) =18x+ C1x
3 + C2x5
y(1) != 18 +C1+C2 = 0 und y′(1) != 1
8 +3C1+5C2 = 0 wird gelost durch C1 = −14 , C2 = 1
8 .
4.3 Potenzreihenansatz
Satz 4.3.1 Gegeben sei das AWP
y(n) +n−1∑j=0
aj(t)y(j) = s(t), y(j)(t0) = bj , j = 0, . . . , n− 1 (1)
77

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
Wenn es ein ε > 0 gibt, so dass die Funktionen a0, . . . , an−1, s auf dem Intervall I :=(t0 − ε, t0 + ε) in eine Potenzreihe entwickelbar sind, dann gilt das selbe auch fur dieLosung y von (1).
Beweis. ohne
Beispiel 4.3.2 (Legendre’sche Differentialgleichung)
(1− t2)y′′ − 2ty′ + αy = 0(⇔ d
dt[(1− t2)y′] = −αy
)(2)
Wir bringen (2) auf die Form (1):
y′′ − 2t1− t2
y′ − α
1− t2y = 0
Hier ist also Satz 4.3.1. mit t0 = 0 und ε = 1 anwendbar. Wir suchen also eine Losungvon (2) der Form
y(t) =∞∑k=0
ak(t− t0)k =∞∑k=0
aktk (3)
Zur Erinnerung: Potenzreihen sind im Inneren ihres Konvergenzbereichs beliebig oftgliedweise differenzierbar (hier auf ]− 1, 1[).
(3) in (2):
(1− t2)∞∑k=2
ckk(k − 1)tk−2 − 2t∞∑k=1
ckktk−1 − α
∞∑k=0
cktk = 0
=⇒∞∑k=2
ckk(k − 1)tk−2 −∞∑k=0
ckk(k − 1)tk − 2∞∑k=0
ckktk + α
∞∑k=0
cktk = 0
⇐⇒∞∑k=0
ck+2(k + 2)(k + 1)tk −∞∑k=0
ckk(k − 1)tk − 2∞∑k=0
ckktk + α
∞∑k=0
cktk = 0
⇐⇒∞∑k=0
tk[ck+2(k + 2)(k + 1)−ckk(k − 1)− 2ckk + αck︸ ︷︷ ︸
=−ck(k2−k+2k−α)=−ck(k(k+1)−α)
]= 0
Koeffizientenvergleich (s. Identitatssatz fur Potenzreihen):
Fur alle k ≥ 0: ck+2 = ckk(k + 1)− α
(k + 2)(k + 1)
weiteres Vorgehen: Auflosen der Rekursion
c0 → c2 → c4 → c6 → . . .
c1 → c3 → c5 → c7 → . . .
Zwei linear unabhangige Losungen:
yg(t) =∞∑j=0
c2jt2j , yu(t) =
∞∑j=0
c2j+1t2j+1
(”gerade und ungerade Losung“)
78

4.3 Potenzreihenansatz
c0 legt yg fest, c1 legt yu fest.
yu(t) = −yu(−t), yg(t) = yg(−t), yu(0) = 0
Spezialfall: ∃ k ∈ N0 : α = k(k + 1). Dann bricht die Rekursion ab. Fur jedes n ∈ N0
erhalt man somit ein Polynom Pn, das (2) lost mit α = n(n + 1) und vom Grad n ist.Mit Pn(1) = 1 wird dieses eindeutig. Legendre-Polynome (Legendre 1785)
cn+2 = cnn(n+ 1)− α
(n+ 2)(n+ 1)= 0
Ist n gerade, so ist yg polynomial. Ist n ungerade, so ist yu polynomial.
n = 0 : P0 = const. ⇒ P0 ≡ 1
n = 1 : P1(t) = c1tP1(1)=1
=⇒ P1(t) = t
n = 2 : P2(t) = c0 + c2t2
c0 + c2 = 1c2 = c0
0(0+1)−2(2+1)(0+2)(0+1) = −3c0
=⇒ −c0 · 2 = 1 ⇒ c0 = −12
=⇒ c2 = 32
=⇒ P2(t) = 32 t
2 − 12
∫ 1
−1P1(t)P2(t) dt =
∫ 1
−1−1
2t+
32t3 dt = 0
∫ 1
−1P0(t)P2(t) dt =
∫ 1
−1−1
2+
32t2 dt = −1
2t+
12t3∣∣∣∣1−1
= 0
allgemein∫ 1
−1Pn(t)Pm(t) dt = 0 fur n 6= m.
”Orthogonalpolynome“{Pn
(∫ 1
−1Pn(t)2 dt
)− 12
}n∈N0
ist eine Orthonormalbasis von L2[−1, 1].
Anwendungen: Wellenphanomene, Gravitationsfeld, spharische Analysis
Bei der allgemeineren impliziten Form
n∑j=0
aj(t)y(j) = s(t)
79

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
reicht es nicht, einfach zu fordern, dass auch an auf (t0 − ε, t0 + ε) in eine Potenzreiheum t0 entwickelbar ist. Bringt man die Gleichung auf die Form (1), so hat man
y(n) +n−1∑j=0
aj(t)an(t)
y(j) =s(t)an(t)
Ein Problem liegt also vor, wenn die Gleichung ”echt implizit“ ist, also an(t0) = 0 gilt,wie auch das folgende Beispiel zeigt:
Beispiel 4.3.3 x2y′′ − xy′ + y = 0
Potenzreihenansatz: y(x) =∞∑k=0
ckxk
=⇒∞∑k=2
ckk(k − 1)xk−2+2 −∞∑k=1
ckkxk−1+1 +
∞∑k=0
ckxk = 0
Koeffizientenvergleich:⇐⇒ c0 = 0, −c1 + c1 = 0, ck (k(k − 1)− k + 1)︸ ︷︷ ︸
(k−1)2 6=0
= 0 ∀k ≥ 2
⇐⇒ ck = 0 ∀k 6= 1 und c1 beliebig⇐⇒ y(x) = cx
bekannterAnsatz−→
Satz 4.2.1.y(x) = u(lnx) als allgemeine Losung mit
2∑k=0
k!ak
(D
k
)u = 0 (a2 = 1, a1 = −1, a0 = 1)
⇐⇒ D2u− 2Du+ u = 0
charakteristisches Polynom: p(λ) = λ2 − 2λ+ 1 = 0 ⇔ λ1,2 = 1
=⇒ allgemeine Losung: u(t) = (C1 + C2t)
=⇒ y(x) = (C1 + C2 lnx)x
−→ Der Potenzreihenansatz hat also nicht alle Losungen geliefert, da in y′′− 1xy′+ 1
x2 y = 0die Vorfaktoren um 0 nicht in eine Potenzreihe entwickelbar sind.
Beachte: C2x lnx ist auch nicht um 0 entwickelbar.
Satz 4.3.4 Gegeben sei
P (x)y′′ +Q(x)y′ +R(x)y = 0 (4)
mit reellen Funktionen P,Q und R. Es gelte:
1. 0 ist eine schwach singulare Stelle, d.h. P (x0) = 0 und es existiert ein % > 0, sodass die Potenzreihenentwicklungen
xQ(x)P (x)
=∞∑n=0
anxn, x2R(x)
P (x)=∞∑n=0
bnxn ∀x ∈ (−%, %)
80

4.4 Die Bessel’sche Differentialgleichung
moglich sind.
2. r ∈ C ist exponierter Index der Gleichung, d.h.
F0(r) := r(r − 1) + a0r + b0 = 0, F0(r + n) 6= 0 ∀n ∈ N
Dann hat (4) auf (−%, %) eine Losung der Form
y(x) = xr∞∑n=0
cnxn mit c0 6= 0. (5)
Die cn erhalt man durch Einsetzen von (5) in (4) und Koeffizientenvergleich.Ist y komplexwertig, so sind Re(y) und Im(y) reellwertige Losungen von (4).
Beweis. ohne
Satz 4.3.5 Voraussetzungen wie in Satz 4.3.4.; r1, r2 ∈ C (nicht zwingend verschiedene)Indizes, d.h. F0(rj) = 0 (j = 1, 2). Sind r1 und r2 reell, so sei r1 ≥ r2 (d.h. r1 istexponiert).Dann hat (4) auf (−%, %) zwei linear unabhangige Losungen
y1(x) = xr1∞∑n=0
cnxn (mit c0 6= 0)
und
y2 =
xr2∞∑n=0
dnxn mit d0 6= 0 , r1 − r2 6∈ N
y1(x) lnx+ xr1∞∑n=1
dnxn , r1 = r2
Ay1(x) lnx+ xr2∞∑n=0
dnxn mit d0 6= 0 , r1 − r2 ∈ N
4.4 Die Bessel’sche Differentialgleichung / schwingende Saite
Beispiel 4.4.1 (schwingende Saite und Membran) Eine Saite mit konstanter Dichte ρwird an zwei Punkten x = 0 und x = L starr befestigt. Dabei herrscht an allen Stellender Saite die gleiche Spannung S = S0 (Ausgangsspannung, rein horizontal). Nun wirddie Saite in z-Richtung ausgelenkt, was eine Ruckstellkraft FR bewirkt.⇒ Die Spannung S ist nicht mehr konstant bzgl. x.
Newton’sches Gesetz: Masse · Beschleunigung = Summe der wirkenden Krafte
Auf einem kleinen Stuck ∆x gilt:
FR = (ρ ·∆x)︸ ︷︷ ︸Masse
·z, z =∂2z
∂t2
Ausschnitt:
81

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
S(x): tangentiale Spannung bei xS(x+ ∆x): tangentiale Spannung bei x+ ∆x
Die horizontale Spannung bleibt erhalten
S0 = S(x+ ∆x) cosβ = S(x) cosα
und fur die vertikale Spannung gilt:
S(x+ ∆x) sinβ − S(x) sinα = FR = (ρ∆x)z
=⇒ S(x+ ∆x) sinβS(x+ ∆x) cosβ
− S(x) sinαS(x) cosα
=ρ
ρ0∆xz
=⇒ tanβ − tanα =ρ
ρ0∆xz
Da die Saite als Graph von x 7→ z(t, x) interpretiert werden kann, gilt fur die Neigungs-winkel:
tanβ =∂z
∂x(x+ ∆x), tanα =
∂z
∂x(x)
=⇒ z =S0
ρ∆x
(∂z
∂x(x+ ∆x)− ∂z
∂x(x))
∆x→0=⇒ ∂2z
∂t2=S0
ρ
∂2z
∂x2(x)
=⇒ ∂2z
∂t2= α2 ∂
2z
∂x2, α =
√S0
ρ0
(Dgl. der schwingenden Saite,d’Alembert, 1746)
Eine 2D-Membran wird in der xy-Ebene am Rand fest eingespannt.
analog−→zu oben
Wellengleichung:∂2z
∂t2= α2
(∂2z
∂x2+∂2z
∂y2
)= α2∆z,
wobei ∆ der Laplace-Operator ist.
82

4.4 Die Bessel’sche Differentialgleichung
Separationsansatz: z(t, x, y) = u(t)v(x, y)
=⇒ uv = α2u∆vu,v 6=0⇐⇒ 1
α2
u
u=
∆vv
=⇒ beide Seiten konstant (da die linke Seite nur von t abhangt und die rechte nurvon x, y)
⇐⇒ 1α2
u
u=
∆vv
= −λ, λ ∈ R konstant
⇐⇒ u+ α2λu = 0, ∆v + λv = 0︸ ︷︷ ︸Helmholtz-Gleichung
(Amplitudengleichung)
, λ ∈ R konstant
Sei die Membran kreisformig und durch x2 + y2 ≤ R2 gegeben.→ Polarkoordinaten: x = r cosϕ, y = r sinϕ, r ∈ [0, R], ϕ ∈ [0, 2π)Fur die Helmholtz-Gleichung benotigen wir den Laplace-Operator in Polarkoordinaten.Sei F (x(r, ϕ), y(r, ϕ)) gegeben. (Fr := ∂F
∂r usw.)
=⇒ (Fr, Fϕ) Ketten-=regel
(Fx, Fy)(xr xϕyr yϕ
)⇐⇒ (Fr, Fϕ)
(xr xϕyr yϕ
)−1
= (Fx, Fy),
wobei(xr xϕyr yϕ
)=(
cosϕ −r sinϕsinϕ r cosϕ
)mit det = r
=⇒ (∇F )T = (Fx, Fy) = (Fr, Fϕ)1r
(r cosϕ r sinϕ− sinϕ cosϕ
)=
(cosϕ ∂
∂r −1r sinϕ ∂
∂ϕ
sinϕ ∂∂r + 1
r cosϕ ∂∂ϕ
)F
=⇒ ∆F = ∇ · ∇F = 1 · ∂2F
∂r2+
1r2
∂2F
∂ϕ2+ 0 · ∂F
2
∂ϕ∂r+
1r
∂F
∂r+ 0 · ∂F
∂ϕ
Also wird aus der Helmholtz-Gleichung
∂2V
∂r2+
1r
∂V
∂r+
1r2
∂2V
∂ϕ2+ λV = 0
mit V (r, ϕ) := v(x(r, ϕ), y(r, ϕ)) und aus der Randbedingung:
V (R,ϕ) = 0 ∀ ϕ ∈ [0, 2π)
Separationsansatz V (r, ϕ) = f(r) · g(ϕ) in der Helmholtz-Gleichung:
(f ′′ +1rf ′ + λf)g +
1r2fg′′ = 0
∣∣∣ · r2
fg
=⇒ r2
f
(f ′′ +
1rf ′ + λf
)︸ ︷︷ ︸
hangt nur von r ab
+g′′
g︸︷︷︸hangt nurvon ϕ ab
= 0
⇐⇒ r2
f
(f ′′ +
1rf ′ + λf
)= −g
′′
g= const. =: µ
⇐⇒ r2f ′′ + rf ′ + (λr2 − µ)f = 0 (1)g′′ + µg = 0 (2)
83

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
Aus der Modellierung (u.a. den Randbedingungen) erhalten wir die Forderungen:
• f(R) = 0
• f(r) fur r → 0 beschrankt
• g muss 2π-periodisch sein(2)⇒ µ > 0 und g(ϕ) = A cos(
√µϕ) + B sin(
√µϕ). Setze
ν :=√µ, wg. 2π-Periodizitat muss ν ∈ N0 gelten.
• u sollte (aus physikalischen Erwartungen heraus) auch periodisch sein. Wegen u+α2λu = 0 muss also auch λ > 0 gelten:
u(t) = C · cos(α√λt) +D sin(α
√λt)
in (1): r2f ′′ + gf ′ + (λr2 − ν2)f = 0, ν ∈ N0, f(R) = 0, f beschrankt
Substituiere: r =ρ√λ, J(ρ) := f
( ρ√λ
),
d
dr
Ketten-=regel
dρ
dr· ddρ
=√λd
dρ
=⇒ ρ2
λ2λ2J ′′ +
ρ√λ
√λJ ′ +
(λρ
λ− ν2
)J = 0
Defnition 4.4.2 Eine Gleichung der Form
x2y′′ + xy′ + (x2 − ν2)y = 0 (BD)
wobei ν ∈ R konstant ist, heißt Bessel’sche Differentialgleichung der Ordnung ν.
Oft werden — wie in obigem Beispiel — nur Losungen auf R+ gesucht.
Die Bessel’sche Differentialgleichung ist schwach singular. Wir bestimmen die Indizesder Gleichung:
xx
x2= 1 =⇒ an = δn0
x2 x2 − ν2
x2= x2 − ν2 =⇒ b2 = 1, b0 = −ν2, alle anderen = 0
Indexgleichung: r(r − 1) + 1 · r − ν2 = 0⇔ r1,2 = ±νO.B.d.A. ν ≥ 0, r1 = +ν exponierter IndexSatz 4.3.4.−→ Ansatz: y(x) = xν
∞∑n=0
cnxn, ν ≥ 0
=⇒ y(k)(x) =∞∑n=0
cn(n+ ν)(n+ ν − 1) · · · (n+ ν − k + 1)xn+ν−k, k > 0
x2y′′ + xy′ + (x2 − ν2)y = 0 bedeutet also
∞∑n=0
xn+ν[cn(n+ ν)(n+ ν − 1) + cn(n+ ν)− ν2cn
]+∞∑n=0
cnxn+ν+2 = 0
⇐⇒∞∑n=0
xn+νcn[(n+ ν)2 − ν2
]+∞∑n=2
cn−2xn+ν = 0
Koeffizientenvergleich: c0(ν2 − ν2) = 0c1[(1 + ν2)ν2] = 0 ⇔ c1 = 0
84

4.4 Die Bessel’sche Differentialgleichung
cn(n2 + 2nν) = −cn−2 ∀n ≥ 2 ⇔ cn = − cn−2
n(n+2ν)Damit c2k+1 = 0 ∀k ∈ N0
Mit Induktion findet man c2k = c0(−1)k
k!2k12k[
(k + ν) . . . (1 + ν)︸ ︷︷ ︸=
Γ(k+ν+1)Γ(ν+1)
]−1, k ∈ N0, wobei
Γ fur die Gamma-Funktion steht (Γ(x + 1) = xΓ(x) ∀x ∈ R+ (aber erweiterbar),Γ(1) = 1, Γ(n+ 1) = n! ∀n ∈ N0), siehe Analysis
Also ist
y(x) = c0
∞∑k=0
(−1)k
22kk!Γ(ν + 1)
Γ(k + ν + 1)x2k+ν
Setze c0 =1
Γ(ν + 1)2ν. Dann ist die erste linear unabhangige Losung
y1(x) =∞∑k=0
(−1)k
22k+νk!Γ(ν + k + 1)x2k+ν
Defnition 4.4.3
Jν(x) :=∞∑k=0
(−1)k
k!Γ(k + ν + 1)
(x2
)2k+ν, x > 0
heißt Bessel’sche Funktion erster Art der Ordnung ν. (Ist ν ∈ N0, so kann Jν auf Rerweitert werden.)
Wir haben einen weiteren Index r = −ν. Nach Satz 4.3.5. gibt es drei Moglichkeiten:
(1) ν − (−ν) 6∈ Z ⇔ 2ν 6∈ Z
y2(x) =∞∑n=0
dnxn−ν analog zu oben, ersetze jedoch ν durch −ν, d.h.
y2(x) =∞∑k=0
(−1)k
k!Γ(k − ν + 1)
(x2
)2k−ν
Dies funktioniert auch, wenn 2ν ∈ Z, ν 6∈ Z.
(2) und (3): ν − (−ν) = 2ν ∈ N0. Wir beschranken uns auf ν ∈ N0.
y2(x) = Ay1(x) lnx+ y−ν∞∑n=0
dnxn mit A = 1 bei ν = 0
einsetzen=⇒ . . . =⇒ y2(x) = Jν(x) lnx− 12
ν−1∑k=0
(ν − k − 1)!k!
(x2
)2k−ν
− 12
∞∑k=0
(−1)k(hk + hk+ν)k!(k + ν)!
(x2
)2k+ν
hk :=k∑j=1
1j
Statt y2 ”bastelt“ man sich ublicherweise aus y1 und y2 eine andere zu y1 linear un-abhangige Losung.
85

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
Defnition 4.4.4
Yν(x) := 2π[(C + lnx− ln 2)Jν(x)− 1
2
ν−1∑k=0
(ν − k − 1)!k!
(x2
)2k−ν
− 12
∞∑k=0
(−1)k(hk + hk+ν)k!(k + ν)!
(x2
)2k+ν]
x ∈ R+, ν ∈ N, hk :=k∑j=0
1j, C := lim
k→∞(hk − ln k)
heißt Bessel’sche Funktion zweiter Art der Ordnung ν oder Neumann’sche Funktion derOrdnung ν.(C heißt Euler-Mascheroni’sche Konstante)
Also gilt:
Satz 4.4.5 Die allgemeine Losung von (BD) der Ordnung ν ≥ 0 ist auf R+
a) y(x) = C1Jν(x) + C2J−ν(x), C1, C2 ∈ R beliebige Konstanten, falls ν 6∈ N0.
b) y(x) = C1Jν(x) + C2Yν(x), C1, C2 ∈ R beliebige Konstanten, falls ν ∈ N0.
”spezielle Funktionen der mathematischen Physik“
Beispiel 4.4.6 (wieder schwingende Membran)
z(t, x, y) = u(t)J(r√λ)g(ϕ)
mit u+ α2λu = 0, ρ2J ′′ + ρJ ′ + (ρ2 − ν2)J = 0, g′′ + µg = 0, µ = ν2, ν ∈ N0
Beachte: Yν , ν > 0, ist nicht beschrankt.α war durch das Problem selbst gegeben.
=⇒ z(t, r, ϕ) =(C1 sin(α
√λt) + C2 cos(α
√λt))·C3Jν(
√λr) · (C4 sin(νϕ) + C5 cos(νϕ))
mit z(t, R, ϕ) = 0 ∀t ∀ϕ, d.h. Jν(√λR) = 0
Dies ist eine Bedingung an λ.
Sind ξj,ν , j = 1, . . . , nν , die positiven Nullstellen von Jν , so ist nur λj =(ξj,νR
)2moglich.
Die allgemeine Losung kann dann dargestellt werden als
z(t, r, ϕ) =∞∑ν=0
nν∑j=1
Aν,j
(C1 sin
(αξj,νRt
)+ C2 cos
(αξj,νRt
))
· C3Jν
(ξj,νRt
)(C4 sin(νϕ) + C5 cos(νϕ))
Die Schwingung ist also die Uberlagerung einzelner Grundschwingungen mit unterschied-lichen Eigenfrequenzen. Die Konstanten hangen hier z.B. von der Anfangsauslenkungz(t0, r, ϕ) ab.
Beispiel 4.4.7 (zuruck zur schwingenden Saite)
∂2
∂t2z = α2 ∂
2z
∂x2(3)
86

4.4 Die Bessel’sche Differentialgleichung
α ∈ R+ konstant, z(t, 0) = z(t, L) = 0Das ist ein Randwertproblem.
Separationsansatz: z(t, x) = u(t)v(x)aus (3) wird
uv = αuv′′u,v 6=0⇐⇒ u
u︸︷︷︸hangt nurvon t ab
= α2 v′′
v︸ ︷︷ ︸hangt nurvon x ab
⇐⇒ v′′
v= −λ, u
u= −α2λ, λ ∈ R konstant
⇐⇒ v′′ + λv = 0, u+ α2λu = 0, λ ∈ R konstant
Losung fur u: u(t) = A sin(α√λt) +B cos(α
√λt)
Losung fur v: v(x) = C1 sin(√λx) + C2(
√λx)
Die Randbedingungen wirken sich auf v aus:
z(t, 0) = 0 ∀t ⇐⇒ v(0) = 0 ⇐⇒ C2 = 0
z(t, L) = 0 ∀t ⇐⇒ v(L) = 0 ⇐⇒ C1 sin(√λL) = 0
C1 6=0⇐⇒ λ =(nπL
)2, n ∈ N0 Eigenwerte des Problems
vn(x) = sin(nπLx)
Eigenfunktionen
Eigenschwingungen:
un(t, x) =[An sin
(αnπ
Lt)
+Bn cos(αnπ
Lt)]· sin
(nπLx)
u1: Grundschwingung, un, n ≥ 2: Oberschwingungen/-toneEigenfrequenzen:
ν = αnπ
L
12π
= αn
2L(α =
√S0ρ , S0 : Anfangsspannung, % : Dichte
)Durch die Anfangsspannung der Saite wird damit die Frequenz der Tone beeinflusst, diedie Saite erzeugt.Fur den Ort hatten wir die Randbedingungen:
z(t, 0) = z(t, L) = 0 ∀t
Fur die Zeit ergeben sich Anfangsbedingungen aus der anfanglichen Auslenkung (g, hgegeben):
z(0, x) = g(x) (Ort der Auslenkung)∂z
∂t(0, x) = h(x) (Geschwindigkeit der Auslenkung)
Ansatz: z(t, x) =∞∑n=1
un(t, x) (vgl. Superpositionsprinzip)
Annahme: gleichmaßige Konvergenz, zwei Mal gliedweise differenzierbar
87

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
⇒ z erfullt die Differentialgleichung und die Randbedingungen
Anfangsbedingungen:
g(x) =∞∑n=1
un(0, x) =∞∑n=1
Bn sin(nπLx)
(4)
h(x) =∞∑n=1
∂un∂t
(0, x) =∞∑n=1
Anαnπ
Lsin(nπLx)
(5)
{sin(nπL·)}
n∈NOrthogonalsystem in L2[0, L], nicht vollstandig (da
{cos(nπL·)}
n∈Nfehlt).
Sind (4),(5) losbar, so ist
Bn =∫ L
0g(x) sin
(nπLx)dx ·
(∫ L
0sin2
(nπLx)dx
)− 12
An =L
αnπ
∫ L
0h(x) sin
(nπLx)dx ·
(∫ L
0sin2
(nπL
)dx
)− 12
4.5 Die Sturm’sche Randwertaufgabe
Defnition 4.5.1 Unter einer Sturm’schen Randwertaufgabe versteht man das Problem
Lu := (p(x)u′)′ + q(x)u = f(x), x ∈ [a, b],R1u := α1u(a) + α2u
′(a) = 0,R2u := β1u(b) + β2u
′(b) = 0,
wobei alle Großen reell sind, p > 0 und C(1) auf [a, b], q und f stetig auf [a, b] sowie(α1, α2), (β1, β2) 6= (0, 0).
Beachte:Lu = p′u′ + pu′′ + qu
Eine Differentialgleichung der Form
u′′ + a1(x)u′ + a0(x)u = g(x)
(a1 stetig) lasst sich auf die Form Lu = f bringen, indem man sie mit p(x) := exp(∫a1(x) dx)
multipliziert:p(x)u′′ + p′(x)︸ ︷︷ ︸
=p(x)a1(x)
u′ + (p(x)a0(x))u = p(x)g(x)
Allgemein geht das auch mit inhomogenen Randbedingungen:
Satz 4.5.2 Sei (u1, u2) eine Integralbasis von Lu = 0. Dann gilt: Das Randwertproblem(RWP)
Lu = f, R1u = ρ1, R2u = ρ2
ist genau dann eindeutig losbar, wenn∣∣∣∣R1u1 R1u2
R2u1 R2u2
∣∣∣∣ 6= 0
88

4.5 Die Sturm’sche Randwertaufgabe
Beweis. allgemeine Losung von Lu = f :
u = up + C1u1 + C2u2; C1, C2 ∈ R bel.
mit Lup = f .Es gilt somit:
RWP ist eindeutig losbar
⇐⇒ Rku = Rkup + C1Rku1 + C2Rku2!= ρk, k = 1, 2, eindeutig losbar
⇐⇒ LGS: C1Rku1 + C2Rku2 = ρk −Rkup, k = 1, 2, eindeutig losbar
⇐⇒∣∣∣∣R1u1 R1u2
R2u1 R2u2
∣∣∣∣ 6= 0
Satz 4.5.3 Das RWPLu = f, Rku = ρk, k = 1, 2
ist genau dann eindeutig losbar, wenn das zugehorige homogene Problem
Lu = 0, Rku = 0, k = 1, 2
nur trivial losbar ist (d.h. u ≡ 0 ist die einzige Losung).
Beweis. u ≡ 0 ist stets Losung des homogenen RWP. Es gilt:
homogenes Problem eindeutig (also nur trivial) losbar
Satz 4.5.2.⇐⇒∣∣∣∣R1u1 R1u2
R2u1 R2u2
∣∣∣∣ 6= 0 (fur irgendeine Integralbasis {u1, u2} von Lu = 0)
Satz 4.5.2.⇐⇒ Lu = f, Rku = ρk, k = 1, 2 eindeutig losbar
Wir ziehen uns daher beim Sturm’schen Problem auf Rku = 0 bei trotzdem Lu = fzuruck (”halbhomogenes Randwertproblem“).
Satz 4.5.4 Ein Sturm’sches RWP sei gegeben, so dass die zugehorige homogene AufgabeLu = 0, Rku = 0, k = 1, 2 nur trivial losbar ist, wobei {v1, v2} ein Fundamentalsystemvon Lu = 0 mit Rkvk = 0, k = 1, 2 sei.Dann sei die Green’sche Funktion G definiert durch
G(x, t) :=1
p(a)W (a)·
{v1(x)v2(t) , a ≤ x ≤ t ≤ bv1(t)v2(x) , a ≤ t ≤ x ≤ b
wobei W die Wronski-Determinante
W (x) :=∣∣∣∣v1(x) v2(x)v′1(x) v′2(x)
∣∣∣∣ist.Dann ist die eindeutig bestimme Losung u des Sturm’schen Problems gegeben durch
u(x) =∫ b
aG(x, t)f(t) dt, a ≤ x ≤ b
89
4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
Beweis. Zu zeigen: Obiges u ist Losung.
u(x) =∫ x
aG(x, t)f(t) dt+
∫ b
xG(x, t)f(t) dt, x ∈ [a, b]
a) Wir berechnen u′:
u(x+ h) =∫ x+h
aG(x+ h, t)f(t) dt+
∫ b
x+hG(x+ h, t)f(t) dt,
1h
(u(x+ h)− u(x))
=1h
(∫ x+h
xG(x+ h, t)f(t) dt+
∫ x
a
(G(x+ h, t)−G(x, t)
)f(t) dt
−∫ x+h
xG(x, t)f(t) dt+
∫ b
x+h
(G(x+ h, t)−G(x, t)
)f(t) dt
)=⇒h→0
u′(x) = G(x, x)f(x) +∫ x
a
∂G
∂x(x, t)f(t) dt
−G(x, x)f(x) +∫ b
x
∂G
∂x(x, t)f(t) dt
=∫ b
a
∂G
∂x(x, t)f(t) dt
analog (setze oben ∂G∂x statt G):
u′′(x) = limξ→x+
∂G
∂x(ξ, x)f(x) +
∫ x
a
∂2G
∂x2(x, t)f(t) dt
− limξ→x−
∂G
∂x(ξ, x)f(x) +
∫ b
x
∂2G
∂x2(x, t)f(t) dt
b) 2 Nebenrechnungen:
(i)∂G
∂x(x, t) =
1p(a)W (a)
{v′1(x)v2(t) , x < t
v1(t)v′2(x) , x > t
(ii)
W ′(x) =d
dx(v1v
′2 − v2v
′1) = v′1v
′2 + v1v
′′2 − v′2v′1 − v2v
′′1
= v1v′′2 − v2v
′′1
=v1
p(−p′v′2 − qv2) +
v2
p(p′v′1 + qv1)
=p′
p(−v1v
′2 + v2v
′1)
= −p′
pW
=⇒ pW ′ + p′W = 0 ⇒ (pW )′ = 0=⇒ p(x)W (x) = p(a)W (a) ∀x ∈ [a, b]
90

4.5 Die Sturm’sche Randwertaufgabe
c) Berechne u′′:
u′′(x) =∫ b
a
∂2G
∂x2(x, t)f(t) dt+
v1(x)v′2(x)p(x)W (x)
f(x)− v′1(x)v2(x)p(x)W (x)
f(x)
=∫ b
a
∂2G
∂x2(x, t)f(t) dt+
f(x)p(x)
gilt fur alle x ∈ [a, b]
d) Lost u die Gleichung Lu = f?
(Lu)(x) = (pu′′ + p′u′ + qu)(x)
= f(x) +∫ b
a
[p(x)
∂2G
∂x2(x, t) + p′(x)
∂G
∂x(x, t) + q(x)G(x, t)
]︸ ︷︷ ︸
=LxG(x,t)
f(t) dt
(Der Index x bei Lx bedeutet hierbei, dass der Operator auf G als Funktion vonx angewandt wird.)
Auf [a, t) und auf (t, b] ist x 7→ G(x, t) jeweils nur ein Vielfaches einer homogenenLosung. Also ist LxG(x, t) = 0 fur x 6= t und somit LxG = 0 fast uberall.⇒ Lu = f .
e) Randbedingungen
Rku = cku(xk) + dku′(xk) (x1 = a, x2 = b, c1 = α1, . . .)
=∫ b
a
(ckG(xk, t) + dk
∂G
∂x(xk, t)︸ ︷︷ ︸
)f(t) dt
= (Rk)xG(x, t)︸ ︷︷ ︸=
1p(a)W (a)
{(R1v1)v2(t) , k = 1H(R2v2)v1(t) , k = 2
}= 0
= 0
Beispiel 4.5.5 u′′ = t3 =: F (t), also
p′u′ + pu′′ + qu = F
p ≡ 1, q ≡ 0, F (t) = t3
u(0) = 0, u(1) + u′(1) = 0
homogenes Problem: Lu = 0, Rku = 0 ∀k = 1, 2u′′ = 0 ⇒ u(t) = ct+ d (char. Polynom: p(λ) = λ2)
R1u = 0 ⇔ u(0) = 0 ⇔ d = 0R2u = 0 ⇔ c+ c = 0 ⇔ c = 0
}nur trivial losbar
⇒ Voraussetzung erfullt
91

4 Lineare Differentialgleichungen hoherer Ordnung mit variablen Koeffizienten
gesucht: Fundamentalsystem {v1, v2} mit
Lvk = 0 (⇔ v′′k = 0)und Rkvk = 0 ∀k = 1, 2
v′′1 = 0, v1(0) = 0 =⇒ v1(t) = ct
v′′2 = 0, v2(1) + v′2(1) = 0 =⇒ v2(t) = ct+ d, v2(1) + v′2(1) = 1=⇒ c+ d+ c ⇔ 2c = −d
z.B. v1(t) = t, v2(t) = t− 2 sind linear unabhangig.
W (x) =∣∣∣∣x x− 21 1
∣∣∣∣ = x · 1− 1 · (x− 2) = 2 6= 0
(Beachte: pW ist konstant.)
=⇒ G(x, t) =12
{x(t− 2) , x ≤ tt(x− 2) , t ≤ x
=⇒ u(x) =∫ 1
0G(x, t)t3 dt
=12
(∫ 1
xx(t− 2)t3 dt+
∫ x
0t(x− 2)t3 dt
)
=12
x(15t5 − 1
2t4) ∣∣∣∣∣
1
x
+ (x− 2)15t5
∣∣∣∣∣x
0
=
12
(−3x
10− x6
5+x5
2+x6
5− 2x5
5
)=
120x5 − 3
20x
92

5 Systeme von Differentialgleichungen
5.1 Lineare Gleichungen mit konstanten Koeffizienten
Wir betrachten Systeme der Form
y′ = Ay + s, y(x0) = y0 (LSk)
y : [a, b]→ Rn, A ∈ Rn×n konstant, y0 ∈ Rn, x0 ∈ [a, b], s : [a, b]→ Rn
zunachst homogen: y′ = Ay, y(x0) = y0
y(x) = e(x−x0)Ay0
Gibt es so etwas wie die obige Gleichung?
Defnition 5.1.1 Fur B ∈ Rn×n sei definiert:
eB :=∞∑k=0
Bk
k!.
(Matrixexponentialfunktion)
Was bedeutet Konvergenz von Matrizen und liegt sie hier vor?Zur Erinnerung: In endlichdimensionalen Vetorraumen X sind alle Normen aquivalent,d.h. sind ‖ · ‖a, ‖ · ‖b Normen auf X, dann existieren Konstanten γ, δ ∈ R+, so dass
γ‖x‖a ≤ ‖x‖b ≤ δ‖x‖a
Konvergenz (xn → ξ ⇐⇒ ‖xn − ξ‖ → 0) ist also unabhangig von der Wahl der Norm.
Wir wahlen folgende:
Defnition 5.1.2 Fur B = (bij)i,j=1,...,n ∈ Rn×n sei
‖B‖1 =n∑
i,j=1
|bij |.
Satz 5.1.3 a) Seien (Bk) =((b(k)ij
)i,j=1,...,n
)k⊂ Rn×n und B = (bij)i,j=1,...,n ∈ Rn×n.
Dann giltBk −→
k→∞B ⇐⇒ b
(k)ij −→
k→∞bij ∀ i, j = 1, . . . , n
b) Mit der ”l1-Norm“ ‖x‖1 =
n∑j=1|xj | gilt
∀B,C ∈ Rn×n ∀x ∈ Rn :‖B · C‖1 ≤ ‖B‖1 · ‖C‖1‖B · x‖1 ≤ ‖B‖1 · ‖x|1
93

5 Systeme von Differentialgleichungen
Satz 5.1.4 Die Exponentialreihe fur eB konvergiert fur alle B ∈ Rn×n.
Beweis. Betrachte die Partialsummen
Sk :=k∑j=0
Bj
j!
Fur k > l ist (mit der Dreiecksungleichung und der Homogenitat der Norm)
‖Sk − Sl‖ =
∥∥∥∥∥∥k∑
j=l+1
Bj
j!
∥∥∥∥∥∥ ≤k∑
j=l+1
1j!‖Bj‖
Satz 5.1.3.≤
k∑j=l+1
1j!‖B‖j
Da die Exponentialreihe fur e‖B‖ stets konvergiert, ist (sk)k eine Cauchy-Folge in Rn×n.Da R vollstandig ist, gilt dies auch fur Rn×n. Folglich konvergiert (Sk)k.
Damit konvergiert die Reihe absolut, also
∞∑k=0
‖Bk‖k!
< +∞
Folglich kann man das Cauchy-Produkt bilden:
eBeC =
∞∑j=0
Bj
j!
∞∑j=0
Cj
j!
=∞∑j=0
(j∑
k=0
Bk
k!Cj−k
(j − k)!
)
=∞∑j=0
1j!
j∑k=0
(j
k
)BkCj−k︸ ︷︷ ︸
=(B+C)j , wennB und C kommutieren,
d.h. BC=CB.
Satz 5.1.5 Seien B,C ∈ Rn×n mit BC = CB. Dann ist
eB+C = eB · eC
(·: Matrixprodukt)
Korollar 5.1.6 Fur jedes B ∈ Rn×n ist eB invertierbar mit(eB)−1 = e−B
Satz 5.1.7 Die Funktion R 3 t 7→ etA, A ∈ Rn×n ist auf ganz R differenzierbar und esgilt
d
dtetA = AetA
Beweis. siehe Ubung (Aufgabe 42a)
Satz 5.1.8 Sei u ∈ C(1)([a, b],Rn) und A ∈ Rn×n. Dann ist
d
dt
(etAu(t)
)= AetAu(t) + etAu′(t)
94

5.1 Lineare Gleichungen mit konstanten Koeffizienten
Beweis. siehe Ubung (Aufgabe 42b)
Satz 5.1.9 Das homogene AWP
y′ = Ay, y(x0) = y0
besitzt fur jede Wahl von x0 ∈ R, y0 ∈ Rn, A ∈ Rn×n genau eine Losung. Diese existiertauf ganz R und sie ist gegeben durch
y(x) = e(x−x0)Ay0.
Beweis. Losung (siehe oben)
y(x) = exA−x0Ay0Satz=5.1.5.
exA(e−x0Ay0
)Satz=⇒5.1.8.
y′(x) = AexA(e−x0Ay0
)= Ay(x)
y(x0) = e(x0−x0)Ay0 = e0y0 = Eny0 = y0 (En : n× n-Einheitsmatrix)
Eindeutigkeit: Angenommen, v ist eine weitere Losung.
=⇒ d
dt
[e−(x−x0)Av(x)
]=
d
dt
[e−xAex0Av(x)
]= −Ae−(x−x0)Av(x) + e−(x−x0)A v′(x)︸ ︷︷ ︸
=Av(x)
= 0
da e−(x−x0)A und A kommutieren:
e−(x−x0)AA =∞∑k=0
[−(x− x0)A]k
k!A
=∞∑k=0
[−(x− x0)]k
k!AkA
= A∞∑k=0
[−(x− x0)]k
k!Ak
= Ae−(x−x0)A
⇐⇒ e−(x−x0)Av(x) = c = const. (∈ Rn)
⇐⇒ v(x) = e(x−x0)A · c
mit v(x0) = y0 also v(x) = e(x−x0)Ay0.
Satz 5.1.10 Sei s stetig auf dem Intervall I. Dann hat das (inhomogene) AWP (LSk) zujeder Wahl von x0 ∈ I, y0 ∈ Rn und A ∈ Rn×n genau eine Losung. Diese ist gegebendurch die Formel
y(x) = e(x−x0)Ay0 +∫ x
x0
e(x−t)As(t) dt, x ∈ I
Beweis.
y′(x) = Ae(x−x0)Ay0 +d
dx
[exA
∫ x
x0
e−tAs(t) dt]
= Ae(x−x0)Ay0 +AexA∫ x
x0
e−tAs(t) dt+ exA e−xAs(x)︸ ︷︷ ︸HDI
= Ay(x) + s(x), y(x0) = y0 + 0 = y0
95

5 Systeme von Differentialgleichungen
Sei v eine weitere Losung des AWPs. Dann gilt:
d
dx(v − y) = Av + s− (Ay + s) = A(v − y), (v − y)(x0) = y0 − y0 = 0
Da die Losung des homogenen Anfangswertproblems stets eindeutig ist (Satz 5.1.9.),muss also v − y ≡ 0 (⇔ v ≡ y) gelten.
Satz 5.1.11 a) Jede Linearkombination von Losungen von y′ = Ay ist wieder eineLosung von y′ = Ay.
b) Die allgemeine Losung von y′ = Ay + s(x) ist von der Form
y(x) = yp(x) + exAv, v ∈ Rn bel.
wobei yp eine feste partikulare Losung von y′ = Ay + s(x) ist.
Was kann man nun mit exA anfangen? −→ Ubung (Blatt 11).
5.2 Lineare Gleichungen mit variablen Koeffizienten
Wir betrachten nun
y′ = A(x)y + s(x), y(x0) = y0 (LSv)
y, s : [a, b]→ Rn, A : [a, b]→ Rn×n, x0 ∈ I := [a, b], y0 ∈ Rn
Satz 5.2.1 (Existenz- und Eindeutigkeitssatz) Sind A und s stetig, dann hat (LSv) furjede Wahl von x0 ∈ I und y0 ∈ Rn genau eine Losung auf ganz I.
Beweis. (Beweisskizze)
y′(x) = A(x)y(x) + s(x) ∀x ∈ I
y(x0) = y0
HDI⇐⇒ y(x) =∫ x
x0
A(t)y(t) + s(t) dt+ y0︸ ︷︷ ︸=:(Ty)(x)
, x ∈ I Fixpunktproblem
Wir verwenden wieder den Weissinger’schen Fixpunktsatz. (C(I), ‖ · ‖∞) ist ein Banach-raum, T : C(I)→ C(I) eine Selbstabbildung.Seien y, z ∈ C(I). Dann kann man zeigen, dass
‖T ky − T kz‖∞ ≤Mk(b− a)k
k!‖y − z‖∞ mit M = max
x∈I‖A(x)‖
=⇒ ∃! Fixpunkt=⇒ AWP eindeutig losbar
Naturlich gelten hier wieder das Superpositionsprinzip und die Formel
”allg. inh. Lsg. = part. inh. Lsg. + allg. hom. Lsg.“.
96

5.2 Lineare Gleichungen mit variablen Koeffizienten
Satz 5.2.2 Sei A : I → Rn×n stetig und y(1), . . . , y(n) seien n linear unabhangigeLosungen der homogenen Gleichung y′ = A(x)y. Dann hat die allgemeine Losung vony′ = A(x)y die Form
y(x) =n∑j=1
Cjy(j)(x), x ∈ I
Beweis. Sei y =: y(0) eine beliebige Losung von y′ = A(x)y. Betrachte das LGS
n∑j=0
αjy(j)(x0) = 0, x0 ∈ I fest
Da hier n Gleichungen fur n+ 1 Unbekannte stehen, muss es eine nicht-triviale Losung(α0, . . . , αn) geben.
Sei z :=n∑j=0
αjy(j). Wegen des Superpositionsprinzips ist z Losung von y′ = A(x)y,
wobei z(x0) = 0.Wegen des Existenz- und Eindeutigkeitssatzes (Satz 5.2.1.) muss somit z ≡ 0 gelten, d.h.
n∑j=0
αjy(j)(x) = 0 ∀x ∈ I
=⇒ α0 y(0)(x)︸ ︷︷ ︸=y(x)
= −n∑j=1
αjy(j)(x) ∀x ∈ I (∗)
Angenommen, α0 = 0. Nach Konstruktion der αj muss mindestens ein αj 6= 0 sein (furein j ∈ {1, . . . , n}). Dann ist aber (−α1, . . . ,−αn) nicht-triviale Losung (siehe (∗)) von
0 =n∑j=1
(−αj)y(j)(x) ∀x ∈ I
Dies ist ein Widerspruch zur linearen Unabhangigkeit der y(j), j = 1, . . . , n. Folglich istα0 6= 0 und (∗) ergibt:
y(x) =n∑j=1
(−αjα0
)y(j)(x) ∀x ∈ I
Defnition 5.2.3 Sei A : I → Rn×n stetig. Jedes System {y(1), . . . , y(n)} von n linear un-abhangigen Losungen von y′ = A(x)y heißt Integralbasis oder auch Fundamentalsystem.
Satz 5.2.4 Sei A : I → Rn×n stetig. Dann gibt es stets eine Integralbasis fur y′ = A(x)y.
Beweis. Sei y(j) die (nach dem Existenz- und Eindeutigkeitssatz existierende und ein-deutige) Losung eines AWPs
y′ = A(x)y, y(x0) = ej ,
97

5 Systeme von Differentialgleichungen
j = 1, . . . , n, x0 ∈ I fest, ej = (δij)i=1,...,n. Dan∑j=1
αjy(j)(x0) =
n∑j=1
αjej genau dann der
Nullvektor ist, wenn α1 = . . . = αn = 0, gilt erst recht, dass
n∑j=1
αjy(j)(x) = 0 ∀x ∈ I ⇐⇒ α1 = . . . = αn = 0
Damit sind {y(1), . . . , y(n)} linear unabhangig.
Satz 5.2.5 Seien A : I → Rn×n stetig und y(1), . . . , y(n) Losungen von y′ = A(x)y. Danngilt:
y(1), . . . , y(n) Integralbasis
⇐⇒ ∃ ξ ∈ I : W (ξ) := det(y(1), . . . , y(n)
)(ξ) 6= 0
⇐⇒ ∀ x ∈ I : W (x) 6= 0
Beweis. A⇐ B (Wir zeigen: ¬A⇒ ¬B)Seien y(1), . . . , y(n) linear abhangig =⇒ ∃ (α1, . . . , αn) 6= 0 mit
n∑j=1
αjy(j)(x) = 0 ∀x ∈ I
Komponentenweise betrachtet hat man ein LGS
n∑j=1
αj y(j)k (x)︸ ︷︷ ︸Matrix
= 0 ∀k = 1, . . . , n (x bel. aber fest) (∗)
Da dieses LGS eine nicht-triviale Losung (α1, . . . , αn) hat, muss
0 = det(y
(j)k (x)
)k=1,...,nj=1,...,n
= W (x)
gelten. Da x ∈ I beliebig gewahlt werden kann, ist also W (x) = 0 ∀x ∈ I. (”¬B“)
Damit gilt auch ”¬C“, d.h. C ⇒ A
A⇒ C (Wir zeigen: ¬C ⇒ ¬A)Sei ξ ∈ I mit W (ξ) = 0. =⇒ Das LGS (∗) hat fur x ∈ ξ eine nicht-triviale Losung(α1, . . . , αn).
Sei y :=n∑j=1
αjy(j). y ist nach dem Superpositionsprinzip Losung von y′ = A(x)y. Ferner
ist y(ξ) = 0. Nach dem Existenz- und Eindeutigkeitssatz muss somit y ≡ 0 gelten.
=⇒ y(x) =n∑j=1
αjy(j)(x) = 0 ∀x ∈ I mit (α1, . . . , αn) 6= (0, . . . , 0)
=⇒ y(1), . . . , y(n) linear abhangig
C ⇒ B trivial.
98

5.2 Lineare Gleichungen mit variablen Koeffizienten
Beispiel 5.2.6 y = −4t2y + 1t y kann man wie folgt als System schreiben:
u := y, v := y :u = v
v = −4t2u+1tv
Wir verwenden/versuchen einen Potenzreihenansatz
y(t) =∞∑k=0
aktk
in die Differentialgleichung:
∞∑n=2
ann(n− 1)tn−2 + 4t2∞∑n=0
antn − 1
t
∞∑n=1
anntn−1 = 0
⇐⇒∞∑n=0
an+2(n+ 2)(n+ 1)tn +∞∑n=2
an−24tn +∞∑
n=−1
an+2(−n− 2)tn = 0
⇐⇒ a1(−1) = 0 und [(n+ 2)(n+ 1)− (n+ 2)]an+2 = 0 fur n = 0 und n = 1und an+2(n+ 2)(n+ 1) + 4an−2 − an+2(n+ 2) = 0 ∀n ≥ 2
⇐⇒ a1 = a3 = 0, a0 und a2 bel. wahlbar und an+2 = − 4an−2
(n+ 2)n∀n ≥ 2
Also gilt: an = 0 fur alle ungeraden n.
Sei n = 2k, k ∈ N0, a2k =: bk. Dann wird aus der Rekursionsformel:
bk+1 = − 4(2k + 2)2k
bk−1 ∀k ≥ 1
⇐⇒ bk+1 = − 1(k + 1)k
bk−1 ∀k ≥ 1
=⇒
{bk = (−1)
k2
1k!b0 = (−1)
k2
1k!a0 fur gerade k
bk = (−1)k−1
21k!a2 fur ungerade k
Beweis durch vollst. Induktion:Der Induktionsanfang (k = 0 bzw. k = 1) ist trivial. Nun zum Induktionsschluss:
b2ν = (−1)ν1
(2ν)!a0
=⇒ b2ν+2 = − 1(2ν + 2)(2ν + 1)
(−1)ν1
(2ν)!a0
= (−1)ν+1 1(2ν + 2)!
a0
b2ν+1 = (−1)ν1
(2ν + 1)!a2
=⇒ b2ν+3 = − 1(2ν + 3)(2ν + 2)
(−1)ν1
(2ν + 1)!a2
= (−1)ν+1 1(2ν + 3)!
a2
99

5 Systeme von Differentialgleichungen
Damit ist die Induktion beendet. Somit gilt:
y(t) = a0
∞∑ν=0
(−1)ν1
(2ν)!︸ ︷︷ ︸= 1a0b2ν
t4ν + a2
∞∑ν=0
(−1)ν1
(2ν + 1)!︸ ︷︷ ︸=a−1
2 b2ν+1
t4ν+2
= a0 cos t2 + a2 sin t2
Fundamentalsystem furd
dt
(u
v
)=(
0 1−4t2 1
t
)(u
v
)ist somit(
cos t2
−2t sin t2
),
(sin t2
2t cos t2
)(beachte: v = u)
Satz 5.2.7 Sei (LSv) mit stetiger Funktion A und stetiger Funktion s gegeben. Dannfuhrt ausgehend von einer Integralbasis (y(1), . . . , y(n)) fur y′ = A(x)y der Ansatz derVariation der Konstanten stets zu einer partikularen Losung von y′ = A(x)y + s(x).
Beweis. Sei (y(1), . . . , y(n)) eine Integralbasis. Der Ansatz
y(x) :=n∑j=1
Cj(x)y(j)(x)
in y′ = A(x)y + s(x) fuhrt zu:n∑j=1
C ′j(x)y(j)(x) +n∑j=1
Cj(x) y(j+1)(x)︸ ︷︷ ︸A(x)y(j)(x)
=n∑j=1
Cj(x)A(x)y(j)(x) + s(x)
⇐⇒n∑j=1
C ′j(x)y(j)(x) = s(x)
Dies ist (fur jedes feste x) ein LGS fur(C ′1(x), . . . , C ′n(x)
)mit der Matrix(
y(j)k (x)
)k,j=1,...,n
=: B(x).
Da eine Integralbasis vorliegt, muss fur alle x gelten:
detB(x) 6= 0 (Wronski-Det.)[C ′(x) = (C ′1(x), . . . , C ′n(x))
]=⇒ C ′(x) =
(B(x)
)−1s(x)
=⇒ C(x) =∫ (
B(x))−1
s(x) dx
einsetzen in y′(x) = A(x)y + s(x):n∑j=1
C ′j(x)y(j)(x) = s(x)
⇐⇒ B(x)C ′(x) = s(x)
⇐⇒ B(x)(B(x)
)−1s(x) = s(x)
Beispiel siehe Ubung.
100

5.3 allgemeine Systeme
5.3 allgemeine Systeme
Analog zum skalaren Fall lasst sich folgendes beweisen:
Satz 5.3.1 (Satz von Peano) Sei f : Q := {(x, y) ∈ Rn∣∣ |x−x0| ≤ a, ‖y−y0‖∞ ≤ b} → Rn
stetig, a, b > 0, x0 ∈ R, y0 ∈ Rn, wobei ‖y‖∞:= max1≤j≤n
|yj | fur y ∈ Rn. Setzt man
µ := ‖f‖C(Q,Rn), α := min(a,b
µ
)dann gibt es (mindestens eine) auf [x0 − α, x0 + α] existierende Losung des AWPs
y′ = f(x, y), y(x0) = y0 (SysAWP)
Satz 5.3.2 (Satz von Picard-Lindelof) f erfulle die Voraussetzungen des Satzes von Peano(Satz 5.3.1.). Zusatzlich sei f Lipschitzsch bzgl. y, d.h.
∃ L > 0 : ‖f(x, y)− f(x, η)‖∞ ≤ L‖y − η‖∞ ∀ (x, y), (x, η) ∈ Q.
Dann hat (SysAWP) genau eine auf [x0 − α, x0 + α] =: J definierte Losung y. IhreKomponenten sind gleichmaßiger Limes der Folge (jeweils ν = 1, . . . , n):
ϕν,0(x) := (y0)ν ,
ϕν,j(x) = (y0)ν +∫ x
x0
fν(t, ϕ1,j−1(t), . . . , ϕn,j−1(t)) dt, j ∈ N, x ∈ J
d.h.‖ϕν,j − yν‖C(J,R) −→
j→∞0 ∀ν = 1, . . . , n
Wie schon in Beispiel 5.2.6. angedeutet, kann man (skalare) explizite Differentialglei-chungen n-ter Ordnung in ein System 1. Ordnung aus n Gleichungen umschreiben.Aus
y(n) = f(x, y, y′, . . . , y(n−1))
wird mit yj := y(j−1), j = 1, . . . , n, das System
y′1 = y2
...y′n−1 = yn
y′n = f(x, y1, . . . , yn)
oder kurz: y′ = f(x, y) mit y = (y1, . . . , yn)T .
Beides ist offensichtlich aquivalent. Entsprechend wird aus den Anfangsbedingungen
y(j)(x0) = y(j)0 , y
(0)0 , . . . , y
(n−1)0 ∈ R
nunyj(x0) = y
(j−1)0 , j = 1, . . . , n
101

5 Systeme von Differentialgleichungen
Die Lipschitz-Bedingung fur das System ist nun
(∃ L > 0 : ∀ (x, y), (x, η) ∈ Q :) ‖f(x, y)− f(x, η)‖∞ ≤ L‖y − η‖∞
⇐⇒ max1≤j≤n
|fj(x, y)− fj(x, η)| ≤ L max1≤j≤n
|yj − ηj |
⇐⇒ max(
max1≤j≤n−1
|yj+1 − ηj+1| , |f(x, y1, . . . , yn)− f(x, η1, . . . , ηn)|)
≤ L max1≤j≤n
|yj − ηj |
o.B.d.A.⇐⇒L>1
|f(x, y1, . . . , yn)− f(x, η1, . . . , ηn)| ≤ L‖y − η‖∞
Dies ist die Lipschitz-Bedingung der skalaren Gleichung n-ter Ordnung. Damit erhaltenwir die folgenden Resultate:
Satz 5.3.3 (Satz von Peano) Sei Q wie in Satz 5.3.1. und f : Q → R stetig. Dann hatdas AWP
y(n) = f(x, y, y′, . . . , y(n−1)), y(j)(x0) = y(j)0 (j = 0, . . . , n− 1)
mindestens eine lokale Losung (d.h. auf einem hinreichend kleinen Intervall um x0).
Satz 5.3.4 (Satz von Picard-Lindelof) f wie in Satz 5.3.3. und zusatzlich Lipschitzschbzgl. y, d.h.
∃ L > 0 : ∀ (x, y), (x, η) ∈ Q : |f(x, y)− f(x, η)| ≤ L‖y − η‖∞
Dann hat das AWP aus Satz 5.3.3. genau eine (lokale) Losung, die gleichmaßiger Limeseiner rekursiven Folge ist (analog zu oben).
Die meisten nicht-linearen Systeme lassen sich nur numerisch losen.
102

6 Stabilitat
6.1 Das Rauber-Beute-Modell
y : Beutepopulation (mit unbegrenztem Nahrungsvorrat)x : Rauberpopulation, ernahrt sich nur von obiger Beute
Es gilt:x = −α1x︸ ︷︷ ︸
”naturliches
Abnahmegesetz“
+ β1xy︸ ︷︷ ︸Wachstum durch Beute-
fang prop. zu Rauber- undBeutepopulation (bei β1=0 exp.
Abfall wg. Nahrungsmangel)
y = α2y︸︷︷︸exp. Wachstum
ohne Rauber
- β2xy︸ ︷︷ ︸Populationsverlustdurch Erbeutung
Dies sind die so genannten Lotka-Volterra’schen Gleichungen mit den Proportionalitats-konstanten α1, α2, β1, β2 ∈ R+.
f(t, x, y) =(−α1y + β1xy
α2x− β2xy
)autonom (d.h. zeitunabhangig), nicht-linear, f ∈ C(∞) ⇒ Lipschitzsch.Nach dem Satz von Picard-Lindelof (Satz 5.3.2.) hat damit das System zu gegebenenAnfangswerten x(0), y(0) genau eine lokale Losung.Das System ist aber nicht analytisch losbar. Trotzdem kann man Eigenschaften derLosung herleiten. Wir fassen hierfur die Losung als Kurve
t 7→(x(t)y(t)
)in der Ebene auf. Man nennt dies allgemein eine Phasenkurve oder Trajektorie desDgl’systems.
1. Gibt es konstante Losungen?
D.h. ist es moglich, dass die Populationen sich nicht andern?
Dies fuhrt zu:
0 = −α1x+ β1xy ⇔ 0 = x(−α1 + β1y) (1)0 = α2x− β2xy ⇔ 0 = y(α2 − β2x) (2)
1. Moglichkeit: x = 0(2)⇒ y = 0 trivialer Fall
2. Moglichkeit: −α1 + β1y = 0(2)⇒ α2 − β2x = 0, d.h. y ≡ α1
β1und x ≡ α2
β2
Man nennt dies eine stationare Losung oder einen Gleichgewichtspunkt (die Tra-jektorie ist ein Punkt).
103

6 Stabilitat
Es gilt: Existiert ein t0 mit x(t0) = 0 = y(t0), so ist dort x(t0) = α2β2
und y(t0) = α1β1
.Wegen Picard-Lindelof kann dies aber nur die stationare Losung sein.
Nicht-stationare Losungen haben also stets Trajektorien mit (x(t), y(t)) 6= (0, 0) ∀ t.
2. Die Trajektoriengleichung
a) Wir nehmen x(t0) 6= 0 fur ein t0 an. Da wir von x ∈ C(1) ausgehen, gibt esein Intervall (t0− ε, t0 + ε), ε > 0, auf dem entweder stets x(t) > 0 oder stetsx(t) < 0 gilt.=⇒ t 7→ x(t) ist lokal invertierbar zu t(x).=⇒ Wir konnen y als y(t(x)) auffassen.
Es gilt nun
dy
dx=dy
dt· dtdx
=dy
dt
(dx
dt
)−1
=y
x=
α2y − β2xy
−α1x+ β1xy=α2 − β2x
x
y
−α1 + β1y
Dies ist eine separable Dgl.∫−α1 + β1y
ydy =
∫α2 − β2x
xdx
⇐⇒ − α1
∫1ydy + β1
∫1 dy = α2
∫1xdx− β2
∫1 dx
⇐⇒ − α1 ln |y|+ β1y + C = α2 ln |x| − β2x (∗)
implizite Trajektoriengleichung (x, y > 0 aus der Anwendung)
b) Sei y(t0) 6= 0 fur ein t0 t(y) x(t(y)) dxdy = dx
dt ·dtdy = dx
dt
(dydt
)−1= x
y
mit Separation der Variablen genau wie oben.
=⇒ Alle nicht-degenerierten (d.h. nicht nur aus einem Punkt bestehenden) Tra-jektorien gehorchen (∗).
Wir vereinfachen zunachst:
(∗) ⇐⇒ C = ln yα1 + lnxα2 − β1y − β2x
⇐⇒ C = ln(xα2yα1
)− β1y − β2x
⇐⇒ C =xα2yα1
eβ2xeβ1y(x, y > 0, C ∈ R konstant ⇔ C > 0)
3. Behauptung: Die Losungen sind periodisch
Sei f(x) :=xα2
eβ2x, g(y) :=
yα1
eβ1y
f ′(x) =α2x
α2−1eβ2x − xα2β2eβ2x
e2β2x
!= 0
⇐⇒ α2xα2−1 − xα2β2 = 0
⇐⇒ α2 − xβ2 = 0
⇐⇒ x =α2
β2
104

6.1 Das Rauber-Beute-Modell
Vorzeichenwechsel von f ′ in x = α2β2
von + nach -
⇒ lokales Maximum f(α2β2
)=: Mf , links davon ist f streng monoton wachsend
und rechts davon ist f streng monoton fallend.
limx→0
f(x) = 0, limx→+∞
f(x) = 0
Damit ist Mf globales Maximum von f . Analog ist Mg := g(α1β1
)globales Maxi-
mum von g.
Fur die Trajektoriengleichung C = f(x)g(y) heißt das, dass fur Konstanten C mitC > Mf ·Mg keine Losung existiert. Bei C = MfMg muss x = α2
β2und y = α1
β1
gelten (stationare Losung!).
Sei also 0 < C < Mf ·Mg. Betrachte g(y) = Cf(x) . f darf nicht zu klein werden. Ge-
nauer muss Cf(x) ≤Mg gelten. Wegen der Form des Graphen gibt es ein maximales
Intervall [x1, x2] mit x1 <α2β2< x2, in dem sich die Werte von x bewegen mussen.(
Cf(x) ≤Mg ⇔ C
Mg≤ f(x)
)x1 und x2 sind gerade so bemessen, dass
C
Mg= f(xj) (j = 1, 2)
=⇒ y =α1
β1
(d.h. es muss g(y) = Mg gelten)
Fur x ∈ (x1, x2) ist Cf(x) < Mg.
Es gibt dann zwei Losungen y1, y2 (mit y1 <α1β1< y2).
Beachte, dass x→ xj (j = 1, 2) zu y = α1β1
fuhrt.⇒ Die Trajektorie ist eine geschlossene Kurve uber x ∈ [x1, x2] und um den stati-onaren Punkt
(α2β2, α1β1
).
Beim Durchlaufen der Trajektorie gilt: ”Umdrehen ist nicht moglich“, da x 6= 0außerhalb von y = α1
β1und y 6= 0 außerhalb von x = α2
β2gilt. Wenn die Trajektorie
zur Zeit t1 einen Punkt wieder trifft, der schon zur Zeit t0 erreicht wurde, so hatdas AWP (
x
y
)= f(x, y), x(t1) = x(t0), y(t1) = y(t0)
genau eine Losung (x, y). Wegen der Autonomie der Dgl. ist dies die gleiche wieim AWP mit gegebenen Werten bei t0, d.h. nur um die Zeit t1 − t0 verschoben:(
x
y
)(t) =
(x
y
)(t− t1 + t0)
Damit sind die Losungen periodisch.
105

6 Stabilitat
4. durchschnittliche Populationsgroßen
Sei T die Periodendauer. Dann sind die Durchschnittspopulationen
x :=∫ T
0x(t) dt · 1
T
y :=∫ T
0y(t) dt · 1
T
gegeben durch
x =1T
∫ T
0x(t) dt =
1T
∫ T
0
α2y(t)− y(t)β2y(t)
dt
=1T
(α2
β2
∫ T
01 dt− 1
β2
∫ T
0
y(t)y(t)
dt
)=
1β2T
(α2T − ln |y(t)|
∣∣∣∣T0
) ∣∣∣∣∣ y(0) = y(T )wg. Periodizitat
=α2
β2
y =α1
β1analog
Die durchschnittlichen Populationsgroßen entsprechen also den stationaren Punk-ten.
5. Ein Naherungszustand
Seien p := α2β2, q := α1
β1, u := x− p, v := y − q.
Naherung fur kleine Terme∣∣up
∣∣ und∣∣vq
∣∣:Mit f(x) := lnx, f (n)(x) = (−1)n−1(n − 1)!x−n erhalt man mit dem Satz vonTaylor
lnx = ln p+∞∑n=1
(−1)n−1 1np−n(x− p︸ ︷︷ ︸
=u
)n
d.h. lnx ≈ ln p+u
p− 1
2u2
p2
analog: ln y ≈ ln q +v
q− 1
2v2
q2
Die Trajektoriengleichung ist
C = lnxα2 + ln yα1 − β2x− β1y
⇐⇒ C = α2 lnx+ α1 ln y − β2x− β1y
106
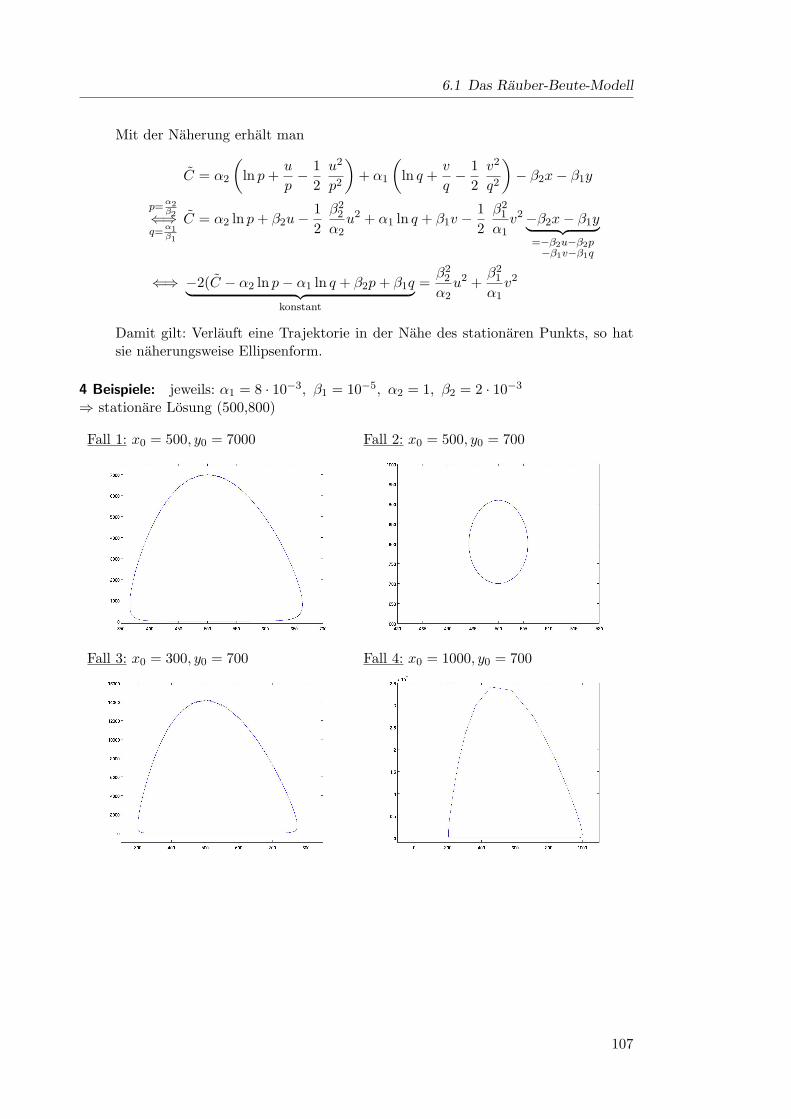
6.1 Das Rauber-Beute-Modell
Mit der Naherung erhalt man
C = α2
(ln p+
u
p− 1
2u2
p2
)+ α1
(ln q +
v
q− 1
2v2
q2
)− β2x− β1y
p=α2β2⇐⇒
q=α1β1
C = α2 ln p+ β2u−12β2
2
α2u2 + α1 ln q + β1v −
12β2
1
α1v2−β2x− β1y︸ ︷︷ ︸
=−β2u−β2p−β1v−β1q
⇐⇒ −2(C − α2 ln p− α1 ln q + β2p+ β1q︸ ︷︷ ︸konstant
=β2
2
α2u2 +
β21
α1v2
Damit gilt: Verlauft eine Trajektorie in der Nahe des stationaren Punkts, so hatsie naherungsweise Ellipsenform.
4 Beispiele: jeweils: α1 = 8 · 10−3, β1 = 10−5, α2 = 1, β2 = 2 · 10−3
⇒ stationare Losung (500,800)
Fall 1: x0 = 500, y0 = 7000 Fall 2: x0 = 500, y0 = 700
Fall 3: x0 = 300, y0 = 700 Fall 4: x0 = 1000, y0 = 700
107

6 Stabilitat
6.2 Definitionen und Grundlagen
Wir betrachten das autonome System
x = F (x, y)y = G(x, y)
(Aut)
wobei F,G ∈ C(1)(R2).Wir wissen: Zu jedem Anfangswert x(t0), y(t0) gibt es genau eine Losung.
Defnition 6.2.1 Jede Losung t 7→(x(t)y(t)
)von (Aut) definiert eine Kurve im R2, die Tra-
jektorie oder Phasenkurve genannt wird. Die xy-Ebene heißt in diesem Zusammenhangauch Phasenraum. Die Menge alle Trajektorien von (Aut) heißt Phasenportrait.
Satz 6.2.2 Durch jeden Punkt des Phasenraumes verlauft genau eine Phasenkurve.
Beweis. ”mindestens eine“: folgt aus der Losbarkeit des AWP (Satz von Peano)
”hochstens eine“: folgt aus der eindeutigen Losbarkeit (Satz von Picard-Lindelof) undder Autonomie:Seien (x, y) und (x, y) zwei Trajektorien mit der Eigenschaft, dass x(t0) = ξ = x(t1) undy(t0) = η = y(t1).⇒ (x, y)(t) := (x, y)(t− t0 + t1) lost (Aut) wegen der Autonomie mit
(x, y)(t0) = (x, y)(t1) = (ξ, η)Eind’keit=⇒ (x, y) = (x, y)
=⇒ (x, y)(t) = (x, y)(t− t0 + t1)︸ ︷︷ ︸gleiche Trajektorie
Defnition 6.2.3 Konstante Losungen von (Aut) heißen stationare Losungen. Die zu-gehorigen konstanten Werte (x0, y0) heißen kritische Punkte oder Gleichgewichtspunktevon (Aut).
Satz 6.2.4 Außerhalb von Gleichgewichtspunkten lasst sich (Aut) lokal als eine Dgl. fury(x) oder fur x(y) schreiben. Genauer gilt:Ist (ξ, η) ein Gleichgewichtspunkt, so existiert eine Umgebung von (ξ, η) im R2, in derdie Trajektorie durch (ξ, η) eindeutig als Losung mindestens eines der folgenden AWPsdargestellt werden kann:
dy
dx=G(x, y)F (x, y)
, y(ξ) = η
bzw.dx
dy=F (x, y)G(x, y)
, x(η) = ξ
Beweis. Da (ξ, η) kein Gleichgewichtspunkt ist, muss F (ξ, η) 6= 0 oderG(ξ, η) 6= 0 gelten.F,G∈C(1)⊂C(0)
=⇒ ∃ Umgebung von (ξ, η), wo F 6= 0 oder G 6= 0.O.B.d.A. F (ξ, η) 6= 0 (anderer Fall analog).=⇒ F hat in dieser Umgebung keinen Vorzeichenwechsel=⇒ dx
dt entweder positiv in der ganzen Umgebung oder negativ
108

6.3 Lineare Systeme mit konstanten Koeffizienten
=⇒ in dieser Umgebung existiert eine Umkehrung t(x) und damit x 7→ y(t(x))Es gilt:
dy
dx=dy
dt· dtdx
=dy
dt
(dx
dt
)−1
=y
x=G(x, y)F (x, y)
Defnition 6.2.5 Eine stationare Losung (x ≡ x0, y ≡ y0) von (Aut) heißt
a) stabil :⇐⇒ ∀ ε > 0 ∃ δ > 0 :((x, y) Lsg. von (Aut), so dass
∥∥∥∥(xy)
(t1)−(x0
y0
)∥∥∥∥2
< δ fur mind. ein t1
=⇒∥∥∥∥(xy
)(t)−
(x0
y0
)∥∥∥∥2
< ε ∀ t ≥ t1
)
(‖ · ‖2: Eukl. Norm)
b) asymptotisch stabil :⇐⇒ (x0, y0) stabil und ∃ δ > 0 :((x, y) Lsg. von (Aut), so dass
∥∥∥∥(xy)
(t1)−(x0
y0
)∥∥∥∥2
< δ fur mind. ein t1
=⇒ limt→∞
(x
y
)(t) =
(x0
y0
))
c) instabil :⇐⇒ (x0, y0) nicht stabil.
6.3 Lineare Systeme mit konstanten Koeffizienten
Wir betrachten wieder (LSk), jedoch mit n = 2 und s ≡ 0.
y = Ay, y(x0) = y0 (LSkh)
Es sei det(A) 6= 0. Dann folgt sofort:
Satz 6.3.1 Der einzige Gleichgewichtspunkt von (LSkh) ist(
00
).
Wir wissen, wie die allg. Losung von y = Ay aussieht:
y(x) = exAz, z ∈ R2 konstant.
Fur das AWP (LSkh) hat man die eindeutige Losung
y(x) = e(x−x0)Ay0.
Die Eigenwerte λ1 und λ2 (moglicherweise mit λ1 = λ2) haben entweder die Eigenschaft,dass beide λ1, λ2 ∈ R oder λ1 = λ2 ∈ C\R︸ ︷︷ ︸
⇒λ1 6=λ2
.
Fur λ1 6= λ2 ist A sicher diagonalisierbar, wahrend im Fall λ1 = λ2 dies nur geht, wennEig(λ1) = {x ∈ R2
∣∣ Ax = λ1x} 2-dimensional ist (→ LA).
109

6 Stabilitat
Wir gehen zunachst vom Fall der Diagonalisierbarkeit aus. Dann kann man eine Basis(v(1), v(2)) des R2 aus Eigenvektoren finden (Av(j) = λjv
(j)). Damit lasst sich z ∈ R2 indieser Basis eindeutig darstellen:
z =2∑j=1
αjv(j) =⇒ y(x) =
2∑j=1
αjexAv(j),
wobei
exAv(j) =
[ ∞∑n=0
xn
n!An
]v(j) =
∞∑n=0
xn
n!Anv(j) =
∞∑n=0
xn
n!λnj v
(j) = exλjv(j)
=⇒ y(x) = exAz =2∑j=1
αjexλjv(j)
α1 und α2 sind die Freiheitsgrade.Fur λ1 = λ2 ∈ C\R erhalt man hieraus (wie gehabt) die reelle Losung
y(x) = eax(α1 sin(bx)v(1) + α2 cos(bx)v(2)
)a=Re(λ1), b=Im(λ1)
Nun zur Nicht-Diagonalisierbarkeit:Seit λ := λ1 = λ2. Nach dem Satz von Cayley-Hamilton gilt fur das char. Polynom pvon A, dass p(A) = 0 (Nullmatrix) (→ LA). In diesem Fall ist also p(x) = (x− λ)2, d.h.(A− λE2)2 = 0. Dann ist
y(x) = exAz = exλE2ex(A−λE2)z = exλ∞∑n=0
xn
n!(A− λE2)n︸ ︷︷ ︸
=0 fur n≥2
z = exλ(z + x(A− λE2)z
)=⇒ y(x) = exλP (x) (P : R→ R2 Polynom vom Grad ≤ 1)(
Beachte, dass P 4 Freiheitsgrade hat, die de facto nur 2 sind:Im allgemeinen Ansatz P (x) = αx+β, α, β ∈ R2 konstant, ist β = z und α = (A−λE2)z,d.h. α = (A− λE2)β.Startet man also mit y(x) = exλP (x), P bel. vektorielles Polynom vom Grad ≤ 1, somuss dieser Ansatz noch in die Dgl. eingesetzt werden.
)Wir erhalten hiermit:
Satz 6.3.2 Seien λ1, λ2 ∈ C die Eigenwerte von A in (LSkh) mit det(A) 6= 0, gezahltnach algebraischer Vielfachheit. Dann ist der Gleichgewichtspunkt
a) asymptotisch stabil genau dann, wenn
Re(λ1) < 0 und Re(λ2) < 0
b) stabil und nicht asymptotisch stabil genau dann, wenn
Re(λ1) = Re(λ2) = 0
c) instabil in allen anderen Fallen.
Bemerkung. (i) Dies beinhaltet auch die Falle reeller Eigenwerte.
(ii) Fall b) tritt wg. detA 6= 0 nur bei imaginaren Eigenwerten auf.
110

6.4 Ljapunoff-Theorie (ein Einblick)
6.4 Ljapunoff-Theorie (ein Einblick)
Defnition 6.4.1 E heißt Ljapunoff-Funktion fur (Aut), wenn es eine offene UmgebungU von (0, 0) gibt, so dass folgendes gilt:
1. E ∈ C(1)(U,R)
2. E(0, 0) = 0 und E(x, y) > 0 ∀ (x, y) ∈ U\{(0, 0)}
3. H :=∂E
∂xF +
∂E
∂yG
{= 0 in (0, 0)≤ 0 in U\{(0, 0)}
Gilt ”<“ und nicht nur ”≤“ in 3., so heißt E strenge Ljapunoff-Funktion.
Satz 6.4.2 (Stabilitatskriterium) Sei (Aut) mit folgenden Eigenschaften gegeben:
a) (x0, y0) ist ein isolierter Gleichgewichtspunkt :⇐⇒ (x0, y0) ist ein Gleichgewichts-punkt, wobei es ein ε > 0 gibt, so dass alle (x, y) mit ‖(x, y)− (x0, y0)‖ < ε keineGleichgewichtspunkte sind.
b) Es existiert eine (strenge) Ljapunoff-Funktion (E(x− x0, y − y0)).
Dann ist (x0, y0) (asymptotisch) stabil.
Beweis. O.B.d.A. sei (0, 0) der betrachtete Gleichgewichtspunkt.
Mit (x, y)(t) := (x, y)(t)− (x0, y0) erhalt man die Differentialgleichung
d
dt(x, y) = (x, y) = (F (x, y), G(x, y))
= (F (x+ x0, y + y0), G(x+ x0, y + y0))
=: (F (x, y), G(x, y))
Stabilitatsaussagen sind fur beide Systeme aquivalent.
Sei ε > 0 gewahlt; o.B.d.A. sei ε hinreichend klein (vgl. Definition der Stabilitat), sodass
∂Kε(0) = {(x, y) ∈ R2∣∣ ‖(x, y)‖2 = ε} ⊂ U
Da E stetig ist, besitzt es ein Minimum m > 0 auf ∂Kε(0). Nach Bedingung 2 istaußerdem E(0, 0) = 0E stetig
=⇒ ∃ δ > 0 (δ < ε) : E < m auf ∂Kδ(0)
• Wir zeigen hierfur nun die Stabilitat:
Sei t 7→ (x(t), y(t)) = (x, y)(t) Trajektorie und t1 Parameter mit ‖(x, y)(t1)‖2 < δ
Dann gilt, wenn man E langs der Trajektorie auswertet:
d
dtE(x(t), y(t)) =
∂E∂x
x︸︷︷︸=F
+∂E
∂yy︸︷︷︸
=G
∣∣∣∣∣∣(x(t),y(t))
= H ≤ 0 (bzw. < 0) (∗)
Da (x, y)(t1) ∈ Kδ(0), ist E(x(t1), y(t1)) < m. Da wegen (∗) E langs der Trajektorie(streng) monoton fallt, ist E(x(t), y(t)) < m ∀ t ≥ t1.Da auf δKε(0) gilt, dass E ≥ m, kann die Trajektorie ∂Kε(0) nicht mehr erreichenund muss in Kε(0) verbleiben ⇒ Stabilitat
111

6 Stabilitat
• asymptotische Stabilitat
Trajektorie wie oben.z.z.: lim
t→∞(x(t), y(t)) = (0, 0).
Da E nur in (0, 0) verschwindet, reicht es zu zeigen, dass limt→∞
E(x(t), y(t)) = 0.Wegen der oben hergeleiteten Monotonie gilt folgendes:
E(t) := E(x(t), y(t)) ≥ limτ→∞
E(x(τ), y(τ)) =: λ
Wegen Bedingung 2 ist λ ≥ 0. Angenommen, λ > 0.E stetig
=⇒E(0,0)=0
∃ ρ > 0 (ρ < δ < ε) : E < λ auf Kρ(0) (∗∗)
Betrachte den Kreisring R := {(x, y) ∈ R2∣∣ ρ ≤ ‖(x, y)‖2 ≤ ε} = Kε(0)\Kρ(0). R
ist kompakt und H ist stetig ⇒ ∃ M < 0 : H ≤M auf R.
Wegen des obigen Stabilitatsbeweises ist die Trajektorie ab t1 in Kε(0) und wegen(∗∗) nicht in Kρ(0), also in R.
=⇒ ∀t ≥ t1 : E(t) HDI= E(t1) +∫ t
t1
dE(τ)dτ︸ ︷︷ ︸
=H(x(τ),y(τ))
dτ
≤ E(t1) +M(t− t1)=⇒ E(t) −→
t→∞−∞, da M < 0
=⇒ λ = 0
Beispiel 6.4.3 x = −x3 + y, y = −x− y5
Gleichgewichtspunkt:
0 = −x3 + y, 0 = −x− y5 =⇒ x0 = 0 = y0
Ljapunoff-Funktion E(x, y) = x2 + y2, denn
1) E ∈ C(1)
2) E(0, 0) = 0 und E(x, y) > 0 sonst
3) H = ∂E∂x F + ∂E
∂yG = 2x(−x3 + y) + 2y(−x− y5) = −2x4 − 2y6 < 0fur (x, y) 6= (0, 0)
und H = 0⇔ x = 0 = ystrenge Ljapunoff-Funktion
=⇒ (0, 0) asymptotisch stabil
Satz 6.4.4 Sei (x0, y0) Gleichgewichtspunkt von (Aut) und
A :=
∂F
∂x
∂F
∂y
∂G
∂x
∂G
∂y
(x0, y0)
Wenn beide (nach Vielfachheiten gezahlte) Eigenwerte von A
112

6.4 Ljapunoff-Theorie (ein Einblick)
a) positive Realteile haben, so ist der Gleichgewichtspunkt isoliert und instabil.
b) negative Realteile haben, so ist der Gleichgewichtspunkt asymptotisch stabil.
Beweis. ohne
(vgl. linearen Spezialfall)
113
6 Stabilitat
114

Bibliographie
• H. Heuser: Gewohnliche Differentialgleichungen: Eine Einfuhrung in Leh-re und Gebrauch, Teubner, Wiesbaden, 2006.
• W. Walter: Gewohnliche Differentialgleichungen: Eine Einfuhrung, Sprin-ger, Berlin, 2000.
115
Recommended

















