GradNet: Gradient-Guided Network for Visual Object Tracking
Peixia Li†, Boyu Chen†, Wanli Ouyang§, Dong Wang†∗, Xiaoyun Yang‡, Huchuan Lu†
† Dalian University of Technology, China, § The University of Sydney, Australia,
‡ China Science IntelliCloud Technology Co., Ltd
{pxli, bychen}@mail.dlut.edu.cn, [email protected], {wdice,lhchuan}@dlut.edu.cn, [email protected]
Abstract
The fully-convolutional siamese network based on tem-
plate matching has shown great potentials in visual track-
ing. During testing, the template is fixed with the initial
target feature and the performance totally relies on the
general matching ability of the siamese network. How-
ever, this manner cannot capture the temporal variations
of targets or background clutter. In this work, we propose
a novel gradient-guided network to exploit the discrimi-
native information in gradients and update the template
in the siamese network through feed-forward and back-
ward operations. To be specific, the algorithm can uti-
lize the information from the gradient to update the tem-
plate in the current frame. In addition, a template gener-
alization training method is proposed to better use gradi-
ent information and avoid overfitting. To our knowledge,
this work is the first attempt to exploit the information in
the gradient for template update in siamese-based trackers.
Extensive experiments on recent benchmarks demonstrate
that our method achieves better performance than other
state-of-the-art trackers. The source codes are available at
https://github.com/LPXTT/GradNet-Tensorflow.
1. Introduction
Visual object tracking is an important topic in computer
vision, where the target object is identified in the initial
video frame and successively tracked in subsequent frames.
In recent years, deep networks [37, 3, 19, 44, 23, 39] have
significantly improved the tracking performance due to their
representation prowess.
There are two groups of deep-learning-based trackers.
The first group [36, 28, 32, 4] improves the discriminative
ability of deep networks by frequent online update. They
utilize the first frame to initialize the model and update it
∗Corresponding Author: Dr. Dong Wang
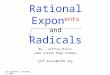
Figure 1. The motivation of our algorithm. Images in the first and
third column are target patches in SiameseFC. The other images
show absolute values of their gradients, where the red regions have
large gradient. As we can see, the gradient values can reflect the
target variations and background clutter.
every few frames. Timely online update enables trackers
to capture target variations but also requires more computa-
tional time. Therefore, the speed of these trackers generally
cannot meet the real-time requirements.
Siamese-based trackers are representative in the second
group [3, 44, 22] which is totally based on offline training.
They learn the similarity between objects in different frames
through massive offline training. During online testing, the
initial target feature is regarded as template and used to
search the target in the following frames. These methods
need no online updating, thus, they usually run at real-time
speeds. However, these methods cannot adapt to appear-
ance variations of target without important online adaptabil-
ity, thereby increasing the risk of tracking drift. To solve
this problem, many researches [16, 45, 40] present dif-
ferent mechanisms to update template features. However,
these methods only focus on combining the previous target
features, ignoring the discriminative information in back-
ground clutter. This results in a big accuracy gap between
the siamese-based trackers and those with online update.
Generally, gradients are calculated through the final
loss which considers both positive and negative candidates.
6162

Table 1. The number of backward iterations to update the template of SiameseFC. ‘LR’ means learning rate; ‘n×’ means n times the basic
learning rate; ‘ITERs’ means the needed iterations to converge. There is no proper step to converge by one iteration.
LR 1× 3× 5× 7× 9× 10× 30× 50× 70× 90× 100× 500× 1000× 3000× 5000×ITERs 449 136 77 64 60 58 59 51 54 56 55 54 61 67 ∞
Thus, gradients contain the discriminative information to
reflect the target variations and distinguish the target from
background clutter. As shown in Figure 1, when objects
are occluded with noise or similar objects coexist at the
neighborhood of the target, the absolute value of gradi-
ents at these locations are prone to be higher. The high
value in gradients can force the template to focus on these
regions and capture the core discriminative information.
Most gradient-based trackers [36, 32] concentrate on hand-
designed optimization algorithms, such as momentum [34],
Adagrad [11], ADAM [20] and so on. These algorithms
need hundreds of iterations to converge, which lead to more
computation and a lower speed. How to take a trade-off
between the speed and accuracy of update is still a problem.
If we expect to reduce the number of training iterations
but still keep online update through gradients, the extreme
case is to adapt the template through one backward prop-
agation. However, training by one backward propagation
is a difficult task. As shown in Table 1, there is no proper
learning rate to make the template of SiameseFC converge
through one iteration. Generally, even with the optimal step
length, moving according to the gradient at only one itera-
tion cannot update the template properly, because the nor-
mal gradient-based optimization is a nonlinear process. On
the other hand, we can learn a nonlinear function by CNNs,
which simulates the non-linear gradient-based optimization
by exploring the rich information in gradients. Therefore,
we propose a gradient-guided network (GradNet) to per-
form gradient-guided adaptation in visual tracking. The
GradNet integrates the adaptation process that consists of
two feed-forward and one backward calculation, simplify-
ing the process of gradient-based optimization.
It is a very tough task to train a robust GradNet due to
two main reasons. The first reason is that the network is
prone to use the appearance of the template instead of us-
ing the gradient for tracking (details can be found in Sec-
tion 3.3), because learning to use the gradients is more dif-
ficult than learning to use appearance. The second reason
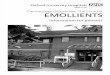
is that the network is prone to overfit. As shown in Fig-
ure 2, the model with normal training (Ours-T) can quickly
get a low distance error but its test accuracy is not promis-
ing, compared with our model. To handle these issues, we
propose a template generalization method to effectively ex-
plore gradient information and avoid overfitting.
The major contributions can be summarized as follows:
• A GradNet is proposed to conduct gradient-guided
template updating for visual tracking.
OursOurs-T
OursOurs-T
Tra
inin
g L
oss
Test
Acc
ura
cy
Figure 2. The training and testing plots of models through normal
training (Ours-T) and our training method (Ours). The left map
shows the error between the predicted map and the real map during
training and the right map shows the accuracy during testing.
• A template generalization method is proposed to en-
sure strong adaptation ability and avoid overfitting.
• Extensive experiments conducted on four popular
benchmarks show that the proposed tracker achieves
promising results at a real-time speed of 80fps.
2. Related Work
2.1. Siamese Network based Tracking
SiameseFC [3] is the most representative trackers based
on template matching. Bertinetto et al. [3] present a siamese
network with two shared branches to extract features of
both the target and the search region. During online track-
ing, the template is fixed as the initial target feature and
the tracking performance mainly relies on the discrimina-
tive ability of the offline-trained network. Without online
updating, the tracker achieves beyond real-time speed. Sim-
ilarly, SINT [33] also designs a network to match the initial
target with candidates in a new frame. Its speed is much
lower because hundreds of candidate patches are sent into
the network instead of one search image. Another siamese-
based tracker is GOTURN [17] which proposes a siamese
network to regress the target bounding box with a speed
of 100fps. All these methods are lack of important on-
line updating. The fixed model cannot adapt to appear-
ance variations, which makes the tracker easily disturbed
by similar instances or background noise. In this paper,
we choose SiameseFC as our basic model and propose a
gradient-guided method to update the template.
2.2. Model Updating in Tracking
Timely updating is essential to keep trackers robust.
There are three main dominant strategies of model up-
dating, including template combination, gradient-descent
based and correlation-based strategies.
6163

Template Combination. Algorithms [16, 45] based on
template combination aim to effectively combine the target
features from previous frames. Guo et al. [16] propose a
fast transformation learning model to enable effective on-
line learning from previous frames. Zhu et al. [45] utilize
the optical flow information to convert templates and inte-
grate them according to their weights. All these methods
focus on using the information of templates, which ignore
the background clutter. Different from these methods, we
take full use of the discriminative information in backward
gradients instead of just integrating previous templates.
Gradient-descent based approaches. Deep trackers [36,
32] based on gradient descent explore the discriminative
information in backward gradients to update the model
through hundreds of iterations. Wang et al. [36] train two
separate convolutional layers to regress Gaussian maps with
the initial frame and update these layers every few frames.
Similarly, Song et al. [32] also utilize a number of gradient
descent iterations in initialization and online update proce-
dures. These trackers need many training iterations to cap-
ture the appearance variations of the target, which makes the
tracker less effective and far from real-time requirements.
We propose a GradNet that needs only one backward propa-
gation and two forward propagations to update the template
effectively. Besides, our template generalization method for
handling overfitting is not investigated in existing works.
Correlation based Tracking. Correlation based track-
ers [18, 26, 10, 43, 42, 6] train classifier through circular
convolution, which can be quickly calculated in Fourier do-
main. The final classifier is trained and updated by solving
the closed-form solution of the optimization function. The
classifier training cannot be simulated totally by deep net-
works, so most correlation based trackers just utilize deep
networks to extract robust features. Differently, our method
aims to update the template in an end-to-end network.
2.3. Gradient Exploiting
Currently, most deep neural networks adopt gradients in
offline training based on hand-designed optimization strate-
gies, such as momentum [34], Adagrad [11], ADAM [20]
and so on. These methods usually need expensive computa-
tion and large-scale data sets. How to accelerate the training
of deep networks is a hot topic in computer vision.
Meta Learning. Meta learning approaches can be broadly
divided into different categories, including optimization-
based methods [1], memory-based methods [31], variable-
based methods [14, 30, 24] and so on. Our algorithm can
be seen as an improved version of the optimization-based
method [1] to adapt to the update task in visual tracking.
Our approach has three main differences compared with [1].
First, ours only learns to update template, but not the net-
work branch of search region. This is specifically designed
for the tracking task. Second, our update process only con-
tains one iteration instead of multiple iterations. Finally,
our training of the optimizer includes second-order gradient
which is not used in [1].
Meta Learning for Tracking. Despite the popularity of
meta learning in many fields, there are few works [40, 29]
applying it to visual tracking. Yang et al. [40] design a
memory structure to dynamically write and read previous
templates for model updating. Differently, we focus on ex-
ploring the discriminative information of gradients. Eun-
byung et al. [29] train the initialization parameters of fil-
ters with pixel-wise learning rate offline and utilize a matrix
multiplication to update the filters. The update is a linear
process. While, our template update is a non-linear process
with convolutional layers and Relu. Besides, we use the tar-
get feature as the prior information to speed up the update
process by providing a good initial value.
3. Proposed Algorithm
The whole pipeline of GradNet is shown in Figure 3,
which consists of two branches. One branch extracts fea-
tures of the search region X and the other branch generates
the template according to the target information and gradi-
ents, detailed in Section 3.2. The template generation pro-
cess consists of initial embedding, gradient calculation and
template updating. First, the shallow target feature f2(Z)is sent to one sub-net U1 (shown in purple in Figure 3) to
obtain an initial template β which is used to calculate the
initial loss L. Second, the gradient of the shallow target fea-
ture is calculated through backward propagation, and sent
to the other sub-net U2 (shown in orange in Figure 3) for
being non-linearly converted to better gradient representa-
tion. Finally, the converted gradient is added to the shallow
target feature to get an updated target feature which is sent
to the sub-net U1 again to output the optimal template. It
should be noted that the two sub-nets in the initial embed-
ding and template update process share parameters. The
optimal template is used to search targets on search regions
through cross correlation convolution.
3.1. Basic Tracker
We adopt SiameseFC [3] as the basic tracker. fx(.) is
used to model the feature extraction branch for search re-
gion, fz(.) is used to model the feature extraction branch
for target region. We assume that the movement of the tar-
get is smooth between two consecutive frames. Thus, we
can crop a search region X which is larger than the target
patch Z in the current frame, centered at the target’s posi-
tion in the last frame. The final score map is calculated by:
S = β ∗ fx(X), (1)
where β is the template to perform an exhaustive search
over the search region X, ∗ means cross correlation convo-
6164

template frame
current frame
target patch
127*127*3
search region
255*255*3
Z
X
f2(.)
fx(.)
*S Y
loss
U2(.) +
*S*
forward backward
β β*
U1(.) U1(.)U1(.)
Figure 3. The pipeline of the proposed algorithm, which consists of two branches. The bottom branch extracts the feature of search region
X and the top branch (named update branch) is responsible for template generation. The two purple trapezoids in the figure represent
sub-nets with shared parameters; the solid and dotted line represents forward and backward propagation respectively.
lution, S denotes the score map to find the target. In Siame-
seFC, the template β is defined as the deep target feature:
βsia = fz(Z), (2)
where Z is the target patch in the first frame. In order to
improve the discriminative ability of the template β during
online tracking, we design the update branch U(α) to ex-
plore the rich information in gradients:
βour = U(Z,X, α), (3)
where α is the parameter of the update branch which can
not only capture the template information in Z but also the
background information in X through gradients.
3.2. Template Generation
Initial Embedding. Given the image pair (X,Z), we want
to get the optimal template β⋆ which is suitable to distin-
guish the target from the background in search region X.
First, we get the target feature f2(Z) (using two convolu-
tional layers) and sent f2(Z) to the sub-net U1 to get the
initial template β:
β = U1(f2(Z), α1), (4)
where α1 is the parameter of U1. The initial template only
contains template information without background infor-
mation. Thus, we need to explore the discriminative infor-
mation in gradient to make it more robust. After getting β,
the initial score map S is calculated through equation (1).
Gradient Calculation. Based on the initial score map S
and the training label Y, we can get the initial loss L by:
L = l (S,Y), (5)
where l(.) is logistic loss function. We utilize this loss to
calculate the gradient of f2(Z) and added it to f2(Z). Then,
the updated target feature is obtained by:
h2(Z) = f2(Z) + U2(∂L
∂f2(Z), α2), (6)
where α2 is the parameter of U2. Here, the gradient is re-
lated to U1 and used as the input of the sub-net U2 to cal-
culate the final loss, so the second-order guidance is intro-
duced in the parameter training of the sub-net U1.
Template Update. Finally, we send the updated target
feature h2(Z) to the sub-net U1 again to obtain the optimal
template β⋆ and the final score map S⋆ by:
β⋆ = U1(h2(Z), α1),
S⋆ = β⋆ ∗ fx(X).
(7)
The optimal score map S⋆ is utilized to estimate the target
position. Our goal is to let S⋆ have the highest value at the
target position and lower values at other positions. Thus, we
utilize the loss which is calculated by S⋆ to train the update
branch:
argminα∑
l (S⋆,Y). (8)
To our knowledge, this work is the first attempt to ex-
ploit the discriminative information of gradients to update
the template in SiameseFC. To simplify the introduction of
template generation process, we just utilize one image pair
here. In the next subsection, we will discuss the training
method more generally and detailedly.
3.3. Template Generalization
Problem of Basic Optimization. Image pairs from dif-
ferent videos and their training labels form the training set
6165

Weight Ratio DistributionOurs Ours-T
0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010 0.011
Figure 4. The distribution of weight ratio between gradients and
features. The weight ration is calculated by the absolute value of
α2, which reflects the proportion of the gradient during the tem-
plate update. The rectangles at different positions represent the
number of points in those ranges.
T = {(X1,Z1,Y1), (X2,Z2,Y2), . . . , (Xn,Zn,Yn)},
Xi is search region which is larger than target patch Zi, Yi
is training label and n is the number of training samples. It
should be noted that Xi and Zi are from different frames of
the same video, while Xi and Xj (i 6= j) are from different
videos. One simple idea to train our network is to utilize
image pairs (Xi,Zi,Yi) in the training set T to get optimal
template β⋆i and final score maps S
⋆i by equations (4−7).
The update branch is trained through:
argminα
n∑
i=1
l (S⋆i ,Yi). (9)
This method has two main problems according to our ex-
periment. The first one is that the update branch of the
network is prone to focus on the template appearance in-
stead of the gradient, because learning to use the gradient
is harder than modeling the similarity metric. As shown in
Figure 4, the network trained without template generaliza-
tion has lower weight ratio of gradients. This means that
the network focuses less on gradients. The second one is
that the network cannot avoid overfitting under this training
process as shown in Figure 2.
Template Generalization. Our goal is forcing the up-
date branch to focus on gradients and avoiding overfitting.
Based on these requirements, we propose a template gener-
alization method which adopts search regions from different
videos to obtain a versatile template and make it perform
well on all search regions in each training batch. We show
the training process of our model without template general-
ization (a) and our model with template generalization (b)in Figure 5 based on four image pairs. The main difference
is that we utilize one template (instead of four templates) to
search targets on four images from different videos.
We choose k (k = 4 in Figure 5) training image pairs
from the training set T to form a training batch and utilize
the target patch Z1 in the first image pair to calculate the tar-
get feature f2(Z1). The initial template β1 can be obtained
f2(z1)
f2(z2)
f2(z3)
f2(z4)
* fx(x1)
* fx(x2)
* fx(x3)
* fx(x4)
f2(z1)
* fx(x1)
* fx(x2)
* fx(x3)
* fx(x4)
a) Ours-T b) Ours
Figure 5. Illustration of ‘Ours-T’ and ‘Ours’ on exploiting tem-
plates. ‘Ours-T’ denotes training without template generalization;
‘Ours’ represents training through template generalization.
by equation (4). Here, β1 means the template which is cal-
culated through Z1. Then, we utilize β1 to find the target on
all search regions:
Si = β1 ∗ fx(Xi), i = 1, 2, ...k. (10)
Then, we can obtain the initial loss by equation (5) and up-
date the template β1 through equations (6, 7). After obtain-
ing the updated template β⋆1
, we utilize it to search the target
in all search regions (X1,X2, ...,Xk) and train the update
branch through equation (9). In this way, the β⋆1
is required
to track the targets in X1,X2, ...,Xk simultaneously. To
clarify, we show the details in Algorithm 1.
The template generalization offers the target feature with
multiple search regions and aims to obtain a general tem-
plate feature which performs well on all search regions.
This strategy can force the network to focus on the gradients
during offline training, because the initial target features are
misaligned and the gradients are aligned. The sub-nets U1
and U2 need to correct the initial misaligned template ac-
cording to the gradients and thereby obtaining a great power
to update templates according to gradients. As shown in
Figures 2 and 4, the template generalization algorithm can
effectively avoid overfitting and pay attention on gradients.
3.4. Online Tracking
After offline training, the update branch is totally fixed
and used for initialization and update during online testing .
Initialization. Given the ground truth in the first frame, we
crop a target patch Z1 and a search region X1 as inputs of
the network. Then, we can obtain the optimal template β⋆
according to equations (4−7). Besides, the updated target
features h2(Z1) is calculated through equation (6) and used
to update the template in the following frames.
Online Update. We update the template β⋆ with one re-
liable training sample through one iteration. We save the
reliable sample (Xi,Yi) according to tracking results and
use it to update the current template β⋆ based on equa-
tions (4−7) ( replacing f2(Z), X, Y with h2(Z), Xi, Yi
). Namely, we obtain updated feature h2(Z1) through the
initial frame. Then, the update branch of network is used
6166

Algorithm 1 Offline training the update branch
Input: Training samples (I1, I2, . . . , In) from different
videos and gaussian maps (Y1,Y2, . . . ,Yn)Output: Trained weights α for the update branch.
Initialize the update branch with weights α0.
Initialize the feature extraction part of the tracker with
parameters from SiameseFC [3].
Crop template images Z and search regions X from
the training samples to construct the training set T ={(X1,Z1,Y1), (X2,Z2,Y2), . . . , (Xn,Zn,Yn)}.
while not converged do
1. Randomly select k training samples from T .
2. Utilize the update branch to get β1 and β⋆1
.
for i ∈ 0, . . . , k do
(a). β1 = U1(f2(Z1), α1)(b). Si = β1 ∗ fx(Xi)
(c). L =∑k
i=1l (Si,Yi)
(d). Get h2(Z1) according to equation (6).
(e). β⋆1= U1(h2(Z1), α1)
end for
3. Train the update branch by minimizing the loss.
for i ∈ 0, . . . , k do
(a). Si⋆ = β⋆
1∗ fx(Xi)
(b). L⋆ =∑k
i=1l (Si
⋆,Yi)(c). Minimize L⋆ to update α0 by SGD.
end for
end while
to update h2(Z1) according to the reliable sample (Xi,Yi)and produce optimal templates β⋆ for the regression part.
3.5. Implementation Details
The feature extraction fx(.) for the search region con-
sists of five convolutional layers with the same structure and
parameters as SiameseFC [3]. The shallow target features
f2(.) are from the second convolutional layers of Siame-
seFC. There are three convolutional layers in U1 which have
the same structure with the last three layers of SiameseFC.
The kernel size of the convolutional layer in U2 is 3×3. The
size of template β and β⋆ is 6×6 and the size of score map is
17×17. During tracking, we update the template β⋆ every 5
frames. The reliable training sample is chosen according to
the max value of the score map. We set the max value of the
score map in the first frame as a threshold thre. If the max
value of the current score map is larger than thre ∗ 0.5, we
think that the result is accurate and crop the training sam-
ple Xt as the reliable training sample. The scale evaluate,
learning rate and training epoch in the proposed method are
the same as those in SiameseFC [3]. To take the trade-off
between the fast adaptation and error accumulation, the fi-
nal template is obtained by combining the initial template
Figure 6. Precision and success plots on the OTB-2015 dataset.
Figure 7. Precision and success plots on the TC128 dataset.
0 5 10 15 20 25 30 35 40 45 50
Location error threshold
0
0.1
0.2
0.3
0.4
0.5
0.6
Pre
cis
ion
Precision plots of OPE on LaSOT
[0.374] MDNet
[0.372] VITAL
[0.351] Ours
[0.341] SiamFC
[0.340] StructSiam
[0.329] DSiam
[0.299] SINT
[0.298] ECO
[0.292] STRCF
[0.272] ECO_HC
[0.265] CFNet
[0.250] HCFT
[0.243] PTAV
0 0.2 0.4 0.6 0.8 1
Overlap threshold
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Su
cce
ss r
ate
Success plots of OPE on LaSOT
[0.413] MDNet
[0.412] VITAL
[0.365] Ours
[0.358] SiamFC
[0.356] StructSiam
[0.353] DSiam
[0.340] ECO
[0.339] SINT
[0.315] STRCF
[0.311] ECO_HC
[0.296] CFNet
[0.285] TRACA
[0.280] MEEM
Figure 8. Precision and success plots on the LaSOT dataset.
and β⋆. We only train the network on ILSVRC2014 VID
dataset and the whole network is fixed during inference.
4. Experiments
Our tracker is implemented in Python with the Ten-
sorflow framework, which runs at 80fps with an intel i7
3.2GHz CPU with 32G memory and a Nvidia 1080ti GPU
with 11G memory. We compare our tracker with many
state-of-the-art trackers with real-time performance (i.e.,
their speeds are faster than 25fps) on recent benchmarks, in-
cluding OTB-2015 [38], TC-128 [25], VOT-2017 [21] and
LaSOT [12].
4.1. Evaluation on the OTB2015 dataset
The OTB-2015 [38] dataset is one of the most popular
benchmarks, which consists of 100 challenging video clips
annotated with 11 different attributes. We refer the reader
to [38] for more detailed information. Here, we adopt both
success and precision plots to evaluate different trackers on
OTB-2015. The precision plot reports the percentages that
the center location errors are smaller than certain thresh-
6167

ECO-HC ACT SiamRPN SiameFC KCFOurs
Figure 9. Representative visual results of different tracking algorithms on the OTB-2015 dataset.
Table 2. The accuracy (A), robustness (R) and expected average
overlap (EAO) scores of different trackers on VOT2017.
Trackers A R EAO
Ours 0.507 0.375 0.247
SiamRPN 0.490 0.460 0.244
CSRDCF++ 0.459 0.398 0.212
SiamFC 0.502 0.604 0.182
ECO HC 0.494 0.571 0.177
Staple 0.530 0.688 0.170
KFebT 0.451 0.684 0.169
SSKCF 0.530 0.656 0.164
CSRDCFf 0.475 0.646 0.158
UCT 0.490 0.777 0.145
MOSSEca 0.400 0.810 0.139
SiamDCF 0.503 0.988 0.135
olds. Whereas the success plot reports the percentages of
frames where the overlap between the predicted and the
ground truth bounding boxes is higher than a series of given
ratios. We compare our algorithm with twelve state-of-the-
art trackers including nine real-time deep trackers (ACT [5],
StructSiam [44], SiamRPN [22], ECO-HC [7], PTAV [13],
CFNet [35], Dsiam [16], LCT [27], SiameFC [3]) and three
traditional trackers (Staple [2], DSST [8], KCF [18]).
Figure 6 illustrates the precision and success plots of all
compared trackers over OTB-2015, which shows the pro-
posed tracker achieves very good performance (merely a
slightly lower than ECO-HC in success). Especially, our
tracker performs significantly better than the baseline model
(SiameseFC) by almost 8% in precision and 6% in success.
To facilitate more detailed analysis, we demonstrate the vi-
sual results of some representative methods in Figure 9.
From these figures, we can see that our method can well
handle various challenging factors and consistently achieve
good performance.
4.2. Evaluation on the TC128 dataset
The TC128 [25] dataset consists of 128 fully-annotated
image sequences with 11 various challenging factors,
which is larger than OTB-2015 and focuses more on
color information. We also adopt both success and pre-
cision plots to evaluate different trackers (the same eval-
uation protocol as OTB-2015). We compare our algo-
rithm with eleven trackers, including ACT [5], PTAV [13],
Dsiam [16], SiameFC [3], HCFT [26], FCNT [36],
STCT[37], BACF [15], SRDCF [9], KCF [18] and
MEEM [41]. Figure 7 shows that our tracker achieves the
best results in terms of both precision and success criterion.
4.3. Evaluation on the VOT2017 dataset
The VOT2017 [21] dataset contains 60 short sequences
annotated with 6 different attributes. According to its eval-
uation protocol, the tested tracker is re-initialized whenever
a tracking failure is detected. In this benchmark, the ac-
curacy (A) and robustness (R) as well as expected aver-
age overlap (EAO) are three important criterion. Different
trackers are ranked based on the EAO criterion. We refer
the reader to [21] for more detailed information. In this
subsection, we compare our algorithm with top ten trackers
reported in the VOT2017 real-time Challenge [21] and an-
other state-of-the-art tracker SiamRPN [22]. Table 2 shows
that our tracker achieves the best performance in terms of
EAO while maintaining a very competitive accuracy and
robustness. The EAO of our tracker is higher than the win-
ner (CSRDCF++) of the VOT2017 real-time Challenge by
3.5%. Our tracker can also perform better than SiamRPN
whose training data (over 100,000 videos) is much larger
than ours (about 4,000 videos).
6168

4.4. Evaluation on the LaSOT dataset
The LaSOT [12] dataset is a very large-scale dataset con-
sisting of 1, 400 sequences with 70 categories and more
than 3.5M frames in total. The average frame length of
this dataset is more than 2, 500 frames. Up to now, this
dataset is the largest for visual tracking. Following one-
pass evaluation, different trackers are compared based on
three criteria including precision, normalized precision and
success. We also adopt precision and success plots to com-
pare 35 trackers and show the performance of the top 12trackers in Figure 8 (more compared results are presented
in the supplementary material). From Figure 8, we can see
that our tracker performs the third-best in this dataset. Al-
though MDNet and VITAL achieve better accuracies than
our tracking algorithm, their speeds are far from the real-
time requirement (MDNet, 1fps and VITAL, 1.5fps).
4.5. Ablation Analysis
Self-comparison. To verify the contribution of each com-
ponent in our algorithm, we implement and evaluate several
variations of our approach (Ours) on OTB-2015. These ver-
sions include: (1) ‘Ours w/o M’: GradNet without template
generalization training process; (2) ‘Ours w/o MG’: Grad-
Net removed template generalization training process and
gradient application. It can be seen as SiameseFC with two
unshared branches; (3) ‘Ours w/o U’: the proposed method
without template update; (4) ‘Ours w 2U’: the two sub-nets
(in purple) in Figure 3 do not share parameters; (5) ‘Ours-
baseline’: SiameseFC.
Table 3. Precision and success scores on OTB-2015 for different
variations of our algorithm.
Variations PRE IOU FPS
Ours 0.861 0.639 80
Ours w/o M 0.823 0.615 80
Ours w/o MG 0.717 0.524 94
Ours w/o U 0.775 0.552 85
Ours w 2U 0.833 0.628 80
Ours-baseline 0.771 0.582 94
The performance of all variations and our final method is
reported in Table 3, from which we can see that all compo-
nents facilitate improving the tracking accuracy. For exam-
ples, the comparison of the ‘Ours w/o M’ and final methods
demonstrates the template generalization training method
could effectively learn an expected GradNet. With the same
amount of training data, ‘Ours’ improves the precision and
IOU score of ‘Ours-baseline’ about 9% and 5% respec-
tively, which demonstrates the effectiveness of the GradNet.
Training Analysis. To further analyze the template gener-
alization, we show the initial score map S and the optimal
score map S⋆ of two different training methods in Figure 10.
(a)
(b)
(c)
(d)
Figure 10. The first row displays the search regions from different
videos. (a) and (b) shows S and S⋆ of our model; (c) and (d) shows
S and S⋆ of the model without template generalization. Model
through template generalization can get general initial score maps
S and optimal final score maps S⋆.
The initial score maps of the model with template general-
ization (a) are noisy score maps where the approximate area
of all objects has high response values. After the template
updating based on gradients, the promising score maps (b)
only have a high response at the target position. Differently,
the model without template generalization is likely to out-
put initial score maps (c) with a high response at the target
position directly. Thus, we think the model trained by tem-
plate generalization learns different tasks in the initial em-
bedding and template update processes. During initial em-
bedding, it learns a general template to detect the target and
background clutter. This manner provides the model more
discriminative gradients. Then, the model learns to update
the template based on these gradients in the template up-
date process. The discriminative gradients enable the fast
adaptation of the network.
5. Conclusions
In this work, we propose a GradNet for template up-
date, achieving accurate tracking with a high speed. The
two sub-nets in GradNet exploits the discriminative infor-
mation in gradients through feed-forward and backward op-
erations and speeds up the hand-designed optimization pro-
cess. To take full use of gradients and obtain versatile tem-
plates, a template generalization method is applied during
offline training, which can force the update branch to con-
centrate on the gradient and avoid overfitting. Experiments
on four benchmarks show that our method significantly im-
proves the tracking performance compared with other real-
time trackers.Acknowledgements The paper is supported in part by Na-
tioal Natural Science Foundation of China No.61725202,
61829102, 61751212 and the Fundamental Research
Funds for the Central Universities under Grant Nos.
DUT19GJ201, DUT18JC30.
6169

References
[1] Marcin Andrychowicz, Misha Denil, Sergio Gomez Col-
menarejo, Matthew W. Hoffman, David Pfau, Tom Schaul,
and Nando de Freitas. Learning to learn by gradient descent
by gradient descent. In NIPS, 2016.
[2] Luca Bertinetto, Jack Valmadre, Stuart Golodetz, Ondrej
Miksik, and Philip H. S. Torr. Staple: Complementary learn-
ers for real-time tracking. In CVPR, 2016.
[3] Luca Bertinetto, Jack Valmadre, Joao F Henriques, Andrea
Vedaldi, and Philip HS Torr. Fully-convolutional siamese
networks for object tracking. In ECCV, 2016.
[4] Boyu Chen, Peixia Li, Chong Sun, Dong Wang, Gang Yang,
and Huchuan Lu. Multi attention module for visual tracking.
Pattern Recognition, 87:80–93, 2019.
[5] Boyu Chen, Dong Wang, Peixia Li, and Huchuan Lu. Real-
time ’actor-critic’ tracking. In ECCV, 2018.
[6] Kenan Dai, Dong Wang, Huchuan Lu, Chong Sun, and Jian-
hua Li. Visual tracking via adaptive spatially-regularized
correlation filters. In ICCV, 2019.
[7] Martin Danelljan, Goutam Bhat, Fahad Shahbaz Khan, and
Michael Felsberg. ECO: efficient convolution operators for
tracking. In CVPR, 2017.
[8] Martin Danelljan, Gustav Hager, Fahad Shahbaz Khan, and
Michael Felsberg. Accurate scale estimation for robust vi-
sual tracking. In BMVC, 2014.
[9] Martin Danelljan, Gustav Hager, Fahad Shahbaz Khan, and
Michael Felsberg. Learning spatially regularized correlation
filters for visual tracking. In ICCV, 2015.
[10] Martin Danelljan, Andreas Robinson, Fahad Shahbaz Khan,
and Michael Felsberg. Beyond correlation filters: Learn-
ing continuous convolution operators for visual tracking. In
ECCV, 2016.
[11] John C. Duchi, Elad Hazan, and Yoram Singer. Adaptive
subgradient methods for online learning and stochastic opti-
mization. Journal of Machine Learning Research, 12:2121–
2159, 2011.
[12] Heng Fan, Liting Lin, Fan Yang, Peng Chu, Ge Deng, Sijia
Yu, Hexin Bai, Yong Xu, Chunyuan Liao, and Haibin Ling.
LaSOT: A high-quality benchmark for large-scale single ob-
ject tracking. CoRR, abs/1809.07845, 2018.
[13] Heng Fan and Haibin Ling. Parallel tracking and verifying:
A framework for real-time and high accuracy visual tracking.
In ICCV, 2017.
[14] Chelsea Finn, Pieter Abbeel, and Sergey Levine. Model-
agnostic meta-learning for fast adaptation of deep networks.
In ICML, 2017.
[15] Hamed Kiani Galoogahi, Ashton Fagg, and Simon Lucey.
Learning background-aware correlation filters for visual
tracking. In ICCV, 2017.
[16] Qing Guo, Wei Feng, Ce Zhou, Rui Huang, Liang Wan, and
Song Wang. Learning dynamic siamese network for visual
object tracking. In ICCV, 2017.
[17] David Held, Sebastian Thrun, and Silvio Savarese. Learning
to track at 100 fps with deep regression networks. In ECCV,
2016.
[18] Joao F. Henriques, Rui Caseiro, Pedro Martins, and Jorge
Batista. High-speed tracking with kernelized correlation fil-
ters. IEEE Transactions on Pattern Analysis and Machine
Intelligence, 37(3):583–596, 2015.
[19] Chen Huang, Simon Lucey, and Deva Ramanan. Learning
policies for adaptive tracking with deep feature cascades. In
ICCV, 2017.
[20] Diederik P. Kingma and Jimmy Ba. Adam: A method for
stochastic optimization. CoRR, abs/1412.6980, 2014.
[21] Matej Kristan, Ales Leonardis, and et al. Jiri Matas. The vi-
sual object tracking VOT2017 challenge results. In ICCVW,
2017.
[22] Bo Li, Junjie Yan, Wei Wu, Zheng Zhu, and Xiaolin Hu.
High performance visual tracking with siamese region pro-
posal network. In CVPR, 2018.
[23] Peixia Li, Dong Wang, Lijun Wang, and Huchuan Lu. Deep
visual tracking: Review and experimental comparison. Pat-
tern Recognition, 76:323–338, 2018.
[24] Zhenguo Li, Fengwei Zhou, Fei Chen, and Hang Li. Meta-
sgd: Learning to learn quickly for few shot learning. CoRR,
abs/1707.09835, 2017.
[25] Pengpeng Liang, Erik Blasch, and Haibin Ling. En-
coding color information for visual tracking: Algorithms
and benchmark. IEEE Transactions on Image Processing,
24(12):5630–5644, 2015.
[26] Chao Ma, Jia-Bin Huang, Xiaokang Yang, and Ming-Hsuan
Yang. Hierarchical convolutional features for visual tracking.
In ICCV, 2015.
[27] Chao Ma, Xiaokang Yang, Chongyang Zhang, and Ming-
Hsuan Yang. Long-term correlation tracking. In CVPR,
2015.
[28] Hyeonseob Nam and Bohyung Han. Learning multi-domain
convolutional neural networks for visual tracking. In CVPR,
2016.
[29] Eunbyung Park and Alexander C. Berg. Meta-tracker: Fast
and robust online adaptation for visual object trackers. In
ECCV, 2018.
[30] Andrei A. Rusu, Dushyant Rao, Jakub Sygnowski, Oriol
Vinyals, Razvan Pascanu, Simon Osindero, and Raia Had-
sell. Meta-learning with latent embedding optimization.
CoRR, abs/1807.05960, 2018.
[31] Adam Santoro, Sergey Bartunov, Matthew Botvinick, Daan
Wierstra, and Timothy P. Lillicrap. Meta-learning with
memory-augmented neural networks. In ICML, 2016.
[32] Yibing Song, Chao Ma, Lijun Gong, Jiawei Zhang, Rynson
W. H. Lau, and Ming-Hsuan Yang. CREST: convolutional
residual learning for visual tracking. In ICCV, 2017.
[33] Ran Tao, Efstratios Gavves, and Arnold W M Smeulders.
Siamese instance search for tracking. In CVPR, 2016.
[34] Paul Tseng. An incremental gradient(-projection) method
with momentum term and adaptive stepsize rule. SIAM Jour-
nal on Optimization, 8(2):506–531, 1998.
[35] Jack Valmadre, Luca Bertinetto, Joao F. Henriques, Andrea
Vedaldi, and Philip H. S. Torr. End-to-end representation
learning for correlation filter based tracking. In CVPR, 2017.
[36] Lijun Wang, Wanli Ouyang, Xiaogang Wang, and Huchuan
Lu. Visual tracking with fully convolutional networks. In
ICCV, 2015.
6170

[37] Lijun Wang, Wanli Ouyang, Xiaogang Wang, and Huchuan
Lu. Sequentially training convolutional networks for visual
tracking. In CVPR, 2016.
[38] Yi Wu, Jongwoo Lim, and Ming-Hsuan Yang. Object track-
ing benchmark. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 37(9):1834–1848, 2015.
[39] Bin Yan, Haojie Zhao, Dong Wang, Huchuan Lu, and Xi-
aoyun Yang. ‘skimming-perusal’ tracking: A framework for
real-time and robust long-term tracking. In ICCV, 2019.
[40] Tianyu Yang and Antoni B. Chan. Learning dynamic mem-
ory networks for object tracking. In ECCV, 2018.
[41] Jianming Zhang, Shugao Ma, and Stan Sclaroff. MEEM:
robust tracking via multiple experts using entropy minimiza-
tion. In ECCV, 2014.
[42] Tianzhu Zhang, Si Liu, Changsheng Xu, Bin Liu, and Ming-
Hsuan Yang. Correlation particle filter for visual tracking.
IEEE Transactions on Image Processing, 27(6):2676–2687,
2018.
[43] Tianzhu Zhang, Changsheng Xu, and Ming-Hsuan Yang.
Learning multi-task correlation particle filters for visual
tracking. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 41(2):365–378, 2019.
[44] Yunhua Zhang, Lijun Wang, Dong Wang, Mengyang Feng,
Huchuan Lu, and Jinqing Qi. Structured siamese network for
real-time visual tracking. In ECCV, 2018.
[45] Zheng Zhu, Wei Wu, Wei Zou, and Junjie Yan. End-to-end
flow correlation tracking with spatial-temporal attention. In
ECCV, 2018.
6171
Recommended