MANUTENÇÃO ELÉTRICA
INDUSTRIAL
* ENROLAMENTOS P/ MOTORES CA *
Vitória – ES 2006

7. ENROLAMENTOS PARA MOTORES DE CORRENTE ALTERNADA
A maneira mais conveniente de associar vários condutores de um enrolamento é
distribuí-los em forma de bobinas e a distribuição deve ser feita de tal modo que
formem grupos. As bobinas de cada grupo são ligadas entre si, apresentando
cada grupo um início e um fim, colocados uniformemente nas ranhuras do núcleo
do estator para gerar o campo magnético.
Os enrolamentos dos motores CA podem ter diversas formas e distribuições,
dentre as quais destacamos:
Enrolamento meio imbricado
Enrolamento imbricado
Enrolamento concêntrico
No enrolamento meio imbricado cada lado de bobina ocupa toda a área da
ranhura. O número de ranhuras ocupadas deve ser par e o número de bobinas é
igual a metade do número de ranhuras do estator. Todos os condutores situados
numa ranhura fazem parte da mesma bobina. Também chamados de
enrolamentos de uma camada, tem a vantagem de permitir um isolamento mais
perfeito entre as fases sem o uso excessivo de isolante.
Todas as bobinas que compõem os grupos possuem o mesmo formato e
tamanho como também o mesmo número de espiras (pré-moldadas) resultando
num enrolamento contínuo e simétrico.
1

No enrolamento imbricado cada ranhura é ocupada por dois lados de bobina e
existem tantas bobinas quantas são as ranhuras do estator. Todas as bobinas
têm o mesmo formato e tamanho como também o mesmo número de espiras
(pré-moldadas)., resultando num enrolamento perfeitamente simétrico. Os dois
lados de bobinas são colocados em camadas sobrepostas e separadas por um
isolante, pois cada lado de bobina pertence a grupos de fases distintos e como
há uma d.d.p. relativamente elevada, é necessário uma isolação eficiente para
diminuir os riscos de curto circuito entre bobinas.
O nome enrolamento concêntrico (ou em cadeia) é associado ao de uma
corrente, devido a analogia que existe entre os grupos de bobinas (posição
relativa entre eles) e os elos das correntes. No enrolamento em cadeia o formato
das suas bobinas normalmente é oval e o enrolamento é constituído por grupos
contendo duas, três e até mais bobinas de tamanhos diferentes (com o mesmo
centro de referência).
Cada ranhura pode conter um ou mais lados de bobinas e o número de espiras
por bobina em um grupo pode variar em função da distribuição nas ranhuras.
Este tipo de enrolamento pode ser executado manualmente ou utilizando formas
pré-moldadas ou ainda máquinas automáticas para colocação do enrolamento.
2

7.1 REPRESENTAÇÃO DOS ENROLAMENTOS
A visualização mais completa do enrolamento de uma máquina elétrica é feita
mediante seu esquema elétrico. Há vários métodos de mostrar
esquematicamente os enrolamentos porém, todos eles visam por meio de traços
simples, indicar a posição relativa das bobinas que formam a estrutura do motor.
Representação Simbólica Circular
É aquela que representa de modo simplificado as ranhuras e os grupos de
bobinas com as respectivas interligações, como se estivéssemos olhando o motor
pela frente na direção longitudinal do estator. Este tipo de representação é
muito comum em livros técnicos relativos ao assunto. Na medida que os
circuitos internos dos motores ficam mais complexos, este estilo de
representação não é mais usado, pois na prática fica difícil a realização do
desenho, apesar de ser mais fácil sua compreensão.
3

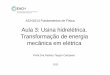
Forma Circular Simplificada (Polar)
Esta forma permite observar a disposição dos grupos de bobinas no estator, bem
como suas interligações. A figura abaixo dá uma idéia da forma; no caso é
relativo a um motor monofásico de 2 pólos.
4

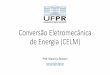
Representação Simbólica Planificada
É aquela que representa os grupos de bobinas interligadas no estator, como se
estivéssemos cortado e esticado o estator sobre um plano, ou seja, seccionamos
o estator no sentido longitudinal e o planificamos como mostra a seqüência na
figura a seguir. Utilizaremos a última figura da seqüência, onde cada retângulo
representa um dente do estator, pela vista superior.
Este tipo de representação embora quebre a continuidade é o mais utilizado na
prática, por ser mais fácil a sua confecção principalmente para enrolamentos
mais complexos, possibilitando uma apreciável facilidade de interpretação.
5

Características do Enrolamento
Para a confecção, colocação e ligação das bobinas que formam o enrolamento
devemos conhecer de antemão suas principais características:
a) NÚMERO DE BOBINAS
O número de bobinas do enrolamento é determinado em função do número de
dentes do estator, número de pólos e do tipo de enrolamento.
6

a) PASSO POLAR
Determinado pela distância em dentes entre o início de duas bobinas interligadas
da mesma fase. O passo polar define a região onde será concentrado um pólo
magnético formado por esta bobina.
b) PASSO DE BOBINA
É a distância em dentes compreendida entre os dois lados da mesma bobina.
Quando o passo de bobina for igual ao passo polar, este é denominado de passo
de bobina inteiro; caso seja menor que o passo polar é denominado de passo de
bobina fracionário.
No projeto dos motores elétricos o passo ideal é determinado através de ensaios
em laboratórios até se obter o melhor rendimento da máquina, não desprezando
o custo de produção.
7

Para calcular usamos as seguintes expressões:
Enrolamento meio imbricado Yb = Yp – (2q –1)
Enrolamento imbricado Yb = Yp – (q –1)
Os enrolamentos meio imbricado são geralmente projetados com bobinas de
passo fracionário (5/6 do passo polar) pois este tamanho além de economizar
material (cobre) reduz as harmônicas das f.e.m. induzidas nos enrolamentos,
resultando em menores perdas por correntes parasitas e histerese.
c) NÚMERO DE PÓLOS
O número de pólos de um motor CA afeta diretamente sua velocidade, ou seja,
de desejamos um motor com elevada rotação este deverá apresentar o mínimo
de pólos magnéticos.
A maneira pela qual os grupos de bobinas são interligados também influi na
formação dos pólos. A equação a seguir nos fornece a relação entre as grandezas
(freqüência da rede de alimentação, número de pólos e velocidade do motor):
nfp .120
=
onde: P = número de pólos
f = freqüência das correntes que alimentam o enrolamento (Hz)
n = velocidade síncrona (rpm)
8

Denominamos pólos ativos quando o número de grupos de bobinas por fase são
interligados de tal forma que criem o mesmo número de pólos. Isto é possível
fazendo com que a corrente que circula em um grupo num determinado sentido
apresente sentido inverso ao circular pelo grupo adjacente, até sair do
enrolamento, originando em cada grupo de bobinas uma polaridade única. Neste
tipo de ligação os grupos estão distanciados de um passo polar ou 180o elétricos.
Denominamos pólos conseqüentes quando cada grupo de bobinas por fase
propicia a formação de dois pólos magnéticos. Isto é conseguido interligando os
grupos de bobinas de tal forma que a corrente circule no mesmo sentido por
todos eles até sair do enrolamento. Neste tipo de ligação os grupos de bobinas
estão distanciados um do outro de duas vezes o passo polar, ou seja 360o
elétricos.
9

d) NÚMERO DE BOBINAS POR PÓLO E FASE
É o número de bobinas que participa da formação de cada pólo, conforme o tipo
de enrolamento.
Para o enrolamento meio imbricado: fasesdenúmero
Ypq__.2
=
Para o enrolamento imbricado: fasesdenúmero
Ypq__
=
Se a interligação dos grupos de bobinas resultar em pólos conseqüentes, o
número de bobinas por pólo/fase dobra de valor (observe se todos os grupos
possuem o mesmo número de bobinas).
e) PASSO DE FASE
Para o funcionamento perfeito do campo girante deve haver uma simetria da
defasagem elétrica das fases (120o elétricos), com a defasagem mecânica dos 3
enrolamentos, ou seja, o início de cada enrolamento deve apresentar uma
defasagem de 120o geométricos. Isto é conseguido dividindo o total de dentes do
estator por 3.
Yf = Número de dentes
No de fases
f) LIGAÇÕES
Os motores monofásicos podem apresentar desde 2 até 8 terminais de ligação,
de acordo com as tensões de trabalho e a possibilidade de inversão de rotação.
Já os motores trifásicos podem apresentar desde 3 até 12 terminais, conforme
as tensões de trabalho definidas pelo fabricante, sempre permitindo a inversão
de rotação.
A identificação dos terminais no motor trifásico pode ser feita através de
números ou letras com a seguinte equivalência:
1=U 2=V 3=W 4=X 5=Y 6=Z
10

11

12

13
Recommended