
Metodos de Resposta em Frequencia
1. Motivacao
2. Graficos de resposta em frequencia
c©Reinaldo M. Palharespag.1 Controle de Sistemas Lineares – Aula 12

Metodos de Resposta em Frequencia
Origem do termo? Entende-se por resposta em frequencia a resposta em
estado estacionario de um sistema para uma entrada senoidal
Motivacao Uma vantagem da abordagem por resposta em frequencia surge do
fato da simplicidade com que se pode, experimentalmente, realizar testes de
resposta em frequencia de forma precisa usando-se geradores de sinais senoidais
disponıveis e instrumentos precisos para medicao
B Geralmente FTs de componentes complicados podem ser determinados
experimentalmente por testes em respostas em frequencia
B Ha ainda a vantagem que um sistema pode ser projetado, tal que os efeitos
de ruıdos indesejaveis possam ser negligenciado
c©Reinaldo M. Palharespag.2 Controle de Sistemas Lineares – Aula 12
Analise de Resposta em Frequencia
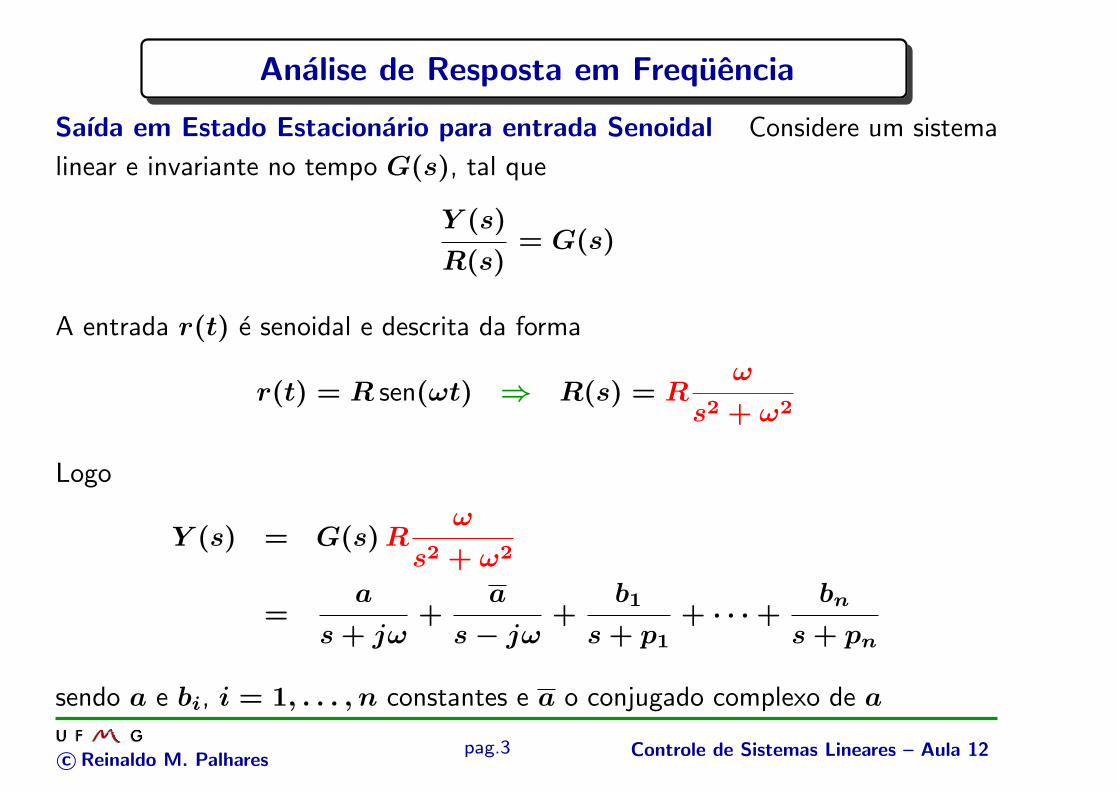
Saıda em Estado Estacionario para entrada Senoidal Considere um sistema
linear e invariante no tempo G(s), tal que
Y (s)
R(s)= G(s)
A entrada r(t) e senoidal e descrita da forma
r(t) = R sen(ωt) ⇒ R(s) = Rω
s2 + ω2
Logo
Y (s) = G(s) Rω
s2 + ω2
=a
s + jω+
a
s − jω+
b1
s + p1
+ · · · +bn
s + pn
sendo a e bi, i = 1, . . . , n constantes e a o conjugado complexo de a
c©Reinaldo M. Palharespag.3 Controle de Sistemas Lineares – Aula 12

Analise de Resposta em Frequencia
Logo aplicando L−1 obtem-se a resposta temporal
y(t) = ae−jωt + aejωt + b1e−p1t + · · · + bne−pnt, t ≥ 0
Para um sistema estavel, −p1, . . . , −pn tem parte real negativa. Portanto, em
regime, e−p1t + · · · + e−pnt tendem a zero, com excecao dos dois primeiros
termos...
B Veja que se Y (s) envolve multiplos polos pj de multiplicade mj , entao y(t)
envolvera termos da forma
thj e−pjt (hj = 0, 1, . . . , mj − 1)
no entanto, se o sistema e estavel, thj e−pjt → 0, t → ∞
c©Reinaldo M. Palharespag.4 Controle de Sistemas Lineares – Aula 12

Analise de Resposta em Frequencia
B Portanto, a resposta em estado estacionario e da forma
yss(t) = ae−jwt + aejωt
sendo que a constante a pode ser avaliada da resposta no domınio-s:
a = G(s)ωR
s2 + ω2(s + jω)
∣
∣
∣
∣
s=−jω
= G(s)ωR
(s − jω)(s + jω)(s + jω)
∣
∣
∣
∣
s=−jω
= −RG(−jω)
2j
Veja ainda que
a = G(s)ωR
s2 + ω2(s − jω)
∣
∣
∣
∣
s=jω
=RG(jω)
2j
c©Reinaldo M. Palharespag.5 Controle de Sistemas Lineares – Aula 12

Analise de Resposta em Frequencia
Como G(jω) e uma funcao de variavel complexa, pode-se escreve-la na forma:
G(jω) = |G(jω)| ejφ
sendo
φ = ∠G(jω) = tan−1
{
Im (G(jω))
Re (G(jω))
}
Da mesma forma obtem-se
G(−jω) = |G(−jω)| e−jφ = |G(jω)| e−jφ
c©Reinaldo M. Palharespag.6 Controle de Sistemas Lineares – Aula 12

Analise de Resposta em Frequencia
∴ yss(t) = a e−jwt + a ejωt
= −R |G(jω)| e−jφ
2je−jωt +
R |G(jω)| ejφ
2jejωt
= R |G(jω)|ej(wt+φ) − ej(wt+φ)
2j
= R |G(jω)| sen(ωt + φ)
= Y sen(ωt + φ)
sendo Y = R |G(jω)|
c©Reinaldo M. Palharespag.7 Controle de Sistemas Lineares – Aula 12

Analise de Resposta em Frequencia
Portanto, para um sistema estavel LIT
sujeito a uma entrada senoidal,
em estado estacionario, a saıda sera tambem senoidal,
tendo a mesma frequencia que a entrada,
porem com amplitude e fase diferentes
Nota Consequencia evidente desta analise: simplesmente substitui-se s por jω
c©Reinaldo M. Palharespag.8 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Forma graficas de apresentar resposta em frequencia
1. Diagrama de Bode ou diagrama logarıtmico
2. Diagrama de Nyquist ou diagrama polar
3. Carta de Nichols ou Magnitude logarıtmica versus diagrama de fase
c©Reinaldo M. Palharespag.9 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Exemplo Circuito RC com FT
G(s) =1
RCs + 1
m
G(jω) =1
jω(RC) + 1=
1
j(
ωω1
)
+ 1, ω1 =
1
RC=
1
τ
O grafico polar e tracado a partir da relacao:
G(jω) = R(ω)+jX(ω) =1 − j(ω/ω1)
(ω/ω1)2 + 1=
1
1 + (ω/ω1)2−j
(ω/ω1)
1 + (ω/ω1)2
c©Reinaldo M. Palharespag.10 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
ou na forma polar:
G(jω) = |G(ω)| ∠φ(ω)
⇓
|G(ω)| =1
√
1 + (ω/ω1)2, ∠φ(ω) = tan−1
(
ω
ω1
)
B A construcao de diagramas polares, como apresentados ate agora, e
relativamente tediosa e nao indica o efeito individual de polos e zeros. A
introducao de graficos logarıtmicos, ou diagramas de Bode, simplificam bastante
o tracado da resposta em frequencia
c©Reinaldo M. Palharespag.11 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Por que um diagrama logarıtmico ? Veja que o logarıtmico tem
propriedades do tipo:
log[(ab)]
n
cd= n log a + n log b − log c − log d
ie, termos multiplicativos sao convertidos em termos aditivos, e termos que
dividem, sao algebricamente adicionados com termos negativos... Alguma
semelhanca com FT descrita em termos de: ganho, zeros e polos?
B O logarıtmico do modulo da FT e normalmente expresso em decibeis, dB, ie
20 log10 |G(ω)|
No diagrama de Bode, a magnitude (logarıtmico do modulo) e tracado em um
grafico e o angulo (argumento de G(jω)) em outro
c©Reinaldo M. Palharespag.12 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Exemplo Para o circuito RC obtem-se
20 log |G| = 20 log
{
[
1
1 + (ωRC)2
]1/2}
= −10 log{
1 + (ωRC)2}
B Para frequencias baixas, ie, ω � 1/RC = 1/τ , o ganho logarıtmico e
−10 log 1 = 0dB
B Para frequencias altas, ie ω � 1/RC, obtem-se
20 log |G| = −20 log ωRC
B Particularmente quando w = 1/RC, na chamada frequencia de corte (ou de
canto), obtem-se
20 log |G| = −10 log(1 + 1) = −3.01dB
c©Reinaldo M. Palharespag.13 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Nota Veja que para frequencias mais altas, tomando-se ω2 = 10ω1, ou
ω1 = ω2/10 quando se aplica a analise obtem-se neste trecho uma informacao
de magnitude da forma
−20 log ω2τ − (−20 log ω1τ ) = −20 logω2τ
ω1τ
= −20 log 10
= −20dB/decada
c©Reinaldo M. Palharespag.14 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
B Para ω2 = 2ω1, obtem-se
−20 log ω2τ − (−20 log ω1τ ) = −20 logω2
ω1
= −20 log 2
= −6dB/oitava
c©Reinaldo M. Palharespag.15 Controle de Sistemas Lineares – Aula 12

MA
ST
ER
101
Copyright ©
1998 by Addison W
esley Longman. A
ll rights reserved.
0
245
290
10
0
210
220
0.1t
10t
1t
dBf
(v),
deg
rees
v
Exactcurve
Asymptoticcurve
Linearapproximation
Exact
(a)
(b)
Figure 8.9 Bode diagram for (1 + jvt)–1

Grafico de Resposta em Frequencia
Para a FT generica
G(jω) =
Kb
Q∏
i=1
(1 + jωτi)
(jω)N
M∏
m=1
(1 + jωτm)
R∏
k=1
[
1 +
(
2ζk
ωnk
)
jω +
(
jω
ωnk
)2]
c©Reinaldo M. Palharespag.17 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
O modulo logarıtmico de G(jω) e
|G(jω)| = 20 log Kb + 20
Q∑
i=1
log |1 + jωτi|
− 20 log∣
∣(jω)N∣
∣ − 20M∑
m=1
log |1 + jωτm|
− 20R
∑
k=1
log
∣
∣
∣
∣
∣
1 +
(
2ζk
ωnk
)
jω +
(
jω
ωnk
)2∣
∣
∣
∣
∣
Nota Basta adicionar a parte de cada fator individualmente...
c©Reinaldo M. Palharespag.18 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
O grafico de fase corresponde a soma dos argumentos de cada fator da FT, ou:
φ(ω) =
Q∑
i=1
tan−1(ωτi) − N(900)
−M∑
m=1
tan−1(ωτm)
−R
∑
k=1
tan−1
(
2ζkωnkω
ω2nk − ω2
)
c©Reinaldo M. Palharespag.19 Controle de Sistemas Lineares – Aula 12
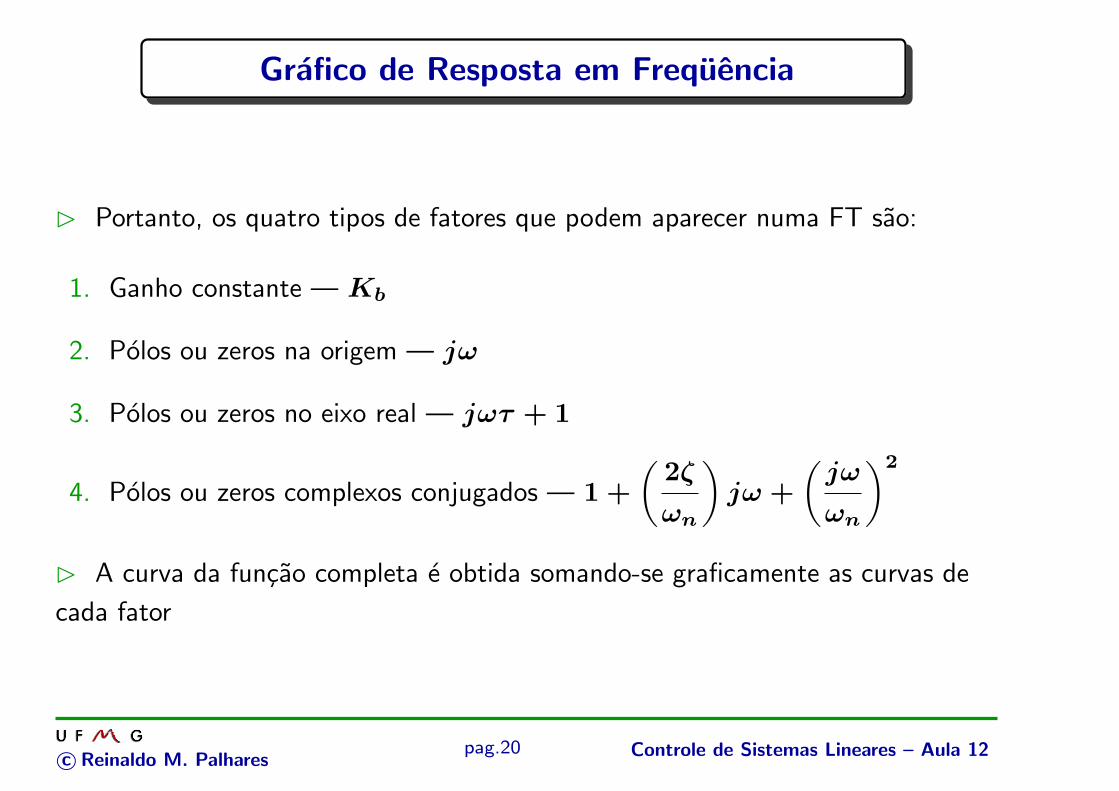
Grafico de Resposta em Frequencia
B Portanto, os quatro tipos de fatores que podem aparecer numa FT sao:
1. Ganho constante — Kb
2. Polos ou zeros na origem — jω
3. Polos ou zeros no eixo real — jωτ + 1
4. Polos ou zeros complexos conjugados — 1 +
(
2ζ
ωn
)
jω +
(
jω
ωn
)2
B A curva da funcao completa e obtida somando-se graficamente as curvas de
cada fator
c©Reinaldo M. Palharespag.20 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Ganho Constante — Kb
20 log Kb = constante em dB, φ(ω) = 0
B Se Kb < 0, o modulo continua sendo 20 log Kb, porem a fase passa a
ser −1800
Polos ou zeros na origem — jω Para um polo na origem
20 log
∣
∣
∣
∣
1
jω
∣
∣
∣
∣
= −20 log ω dB, φ(ω) = −900
Para um zero na origem
20 log |jω| = +20 log ω dB, φ(ω) = +900
c©Reinaldo M. Palharespag.21 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Polos ou zeros no eixo real — jωτ + 1 para um polo em −1/τ , obtem-se
20 log
∣
∣
∣
∣
1
1 + jωτ
∣
∣
∣
∣
= −10 log(1 + ω2τ2) dB, φ(ω) = − tan−1 ωτ
c©Reinaldo M. Palharespag.22 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Polos ou zeros complexos conjugados — 1 +
(
2ζ
ωn
)
jω +
(
jω
ωn
)2
O fator quadratico correspondente a um par de polos complexos conjugados pode
ser escrito na forma normalizada
1 + j2ζu − u2, sendo u =ω
ωn
Portanto, para
G(jω) =1
1 +(
2ζωn
)
jω +(
jωωn
)2
c©Reinaldo M. Palharespag.23 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Obtem-se
20 log |G(jω)| = −10 log[
(1 − u2)2 + 4ζ2u2]
, φ(w) = − tan−1
(
2ζu
1 − u2
)
B Quando u � 1,
20 log |G| ≈ −10 log 1 = 0 dB, φ(w) → 00
B Quando u � 1,
20 log |G| ≈ −10 log u4 = −40 log u dB, φ(w) → −1800
resulta numa curva com inclinacao de −40dB/decada
B As duas assıntotas encontram-se na linha de 0dB, quando u = ω/ωn = 1
c©Reinaldo M. Palharespag.24 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
A aproximacao e boa para raızes complexas? Veja que as duas assıntotas
obtidas sao independes do valor do fator de amortecimento, ie, nao foi
considerado na aproximacao para o tracado da curva de magnitude...
B Proximo a frequencia ω = ωn, um pico ressonante acontece como pode ser
esperado de
G(jω) =1
1 +(
2ζωn
)
jω +(
jωωn
)2
e o valor do fator de amortecimento, ζ, determina a magnitude deste pico
ressonante. Para valores pequenos geram-se picos grandes... Isto e ilustrado na
proxima figura
c©Reinaldo M. Palharespag.25 Controle de Sistemas Lineares – Aula 12

MASTER 102
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
0
220
240
260
280
2100
2120
2140
2160
2180
u 5 v /vn 5 Frequency ratio
Phas
e an
gle,
deg
rees
1.00.4 0.5 0.6 0.80.30.20.1 104 5 6 832
20
10
0
210
220
230
240
20 lo
guG
u
(b)
u 5 v /vn 5 Frequency ratio
1.00.4 0.5 0.6 0.80.30.20.1 104 5 6 832
(a)
z 5 0.050.100.150.200.25
0.3 0.4 0.50.6
0.81.0
z 5 0.050.100.150.200.25
0.3 0.40.5
0.60.8
1.0
Figure 8.10 Bode diagram for G( jv) = [1 + (2z/vn)jv + ( jv/vn)2]–1
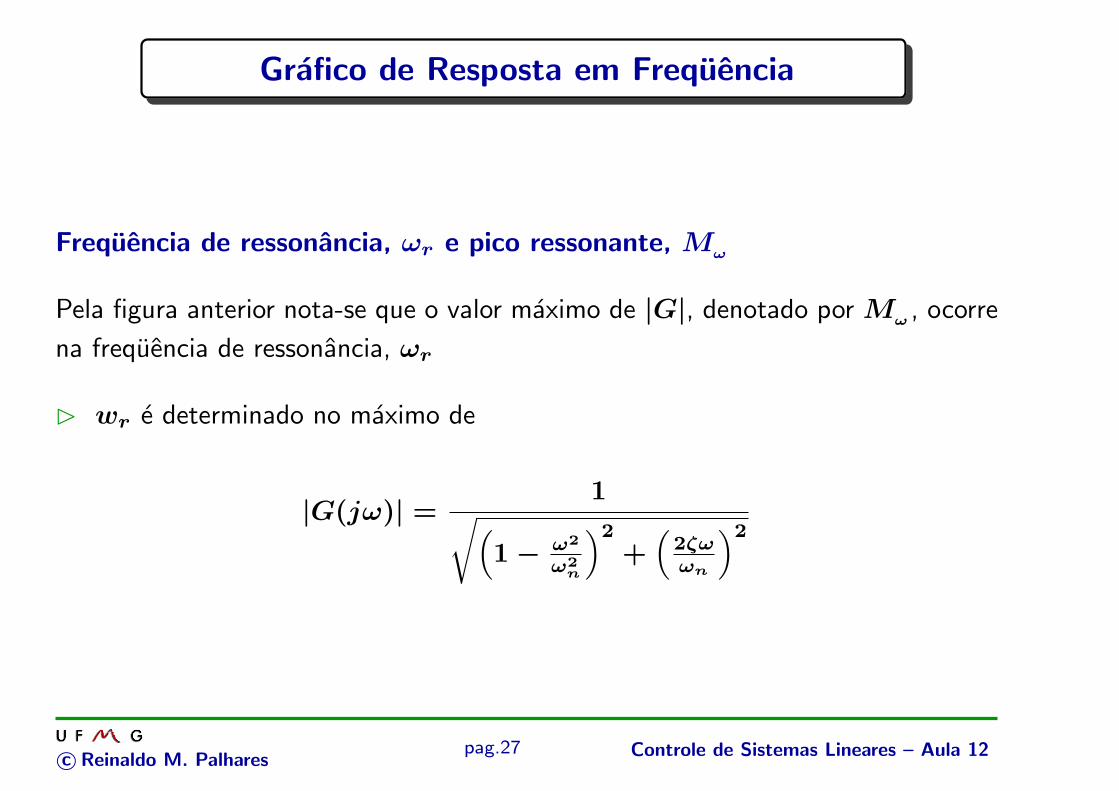
Grafico de Resposta em Frequencia
Frequencia de ressonancia, ωr e pico ressonante, Mω
Pela figura anterior nota-se que o valor maximo de |G|, denotado por Mω, ocorre
na frequencia de ressonancia, ωr
B wr e determinado no maximo de
|G(jω)| =1
√
(
1 − ω2
ω2n
)2
+(
2ζωωn
)2
c©Reinaldo M. Palharespag.27 Controle de Sistemas Lineares – Aula 12

Grafico de Resposta em Frequencia
Como o numerador de |G| e constante, o valor de pico de |G| ira ocorrer quando
o valor do denominador
(
1 −ω2
ω2n
)2
+
(
2ζω
ωn
)2
=
[
ω2 − ω2n(1 − 2ζ2)
ω2n
]2
+ 4ζ2(1 − ζ2)
for mınimo, o que acontece em
ωr = ω = ωn
√
1 − 2ζ2
Substituindo ωr em |G|, obtem-se o pico ressonante
Mω
= |G(ωr)| =1
2ζ√
1 − ζ2
c©Reinaldo M. Palharespag.28 Controle de Sistemas Lineares – Aula 12

MASTER 103
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
z
0.20 0.30 0.40 0.50 0.60 0.70
3.25
3.0
2.75
2.5
2.25
2.0
1.75
1.5
1.25
1.0
0.90
0.80
0.70
0.60
0.50
0.40
0.30
0.20
0.101.0
Mpv
Mpvvr /vn
vr /vn
Figure 8.11 The maximum of the frequency response, Mpv, and theresonant frequency, vr , versus z for a pair of complex conjugate poles
MASTER 104
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
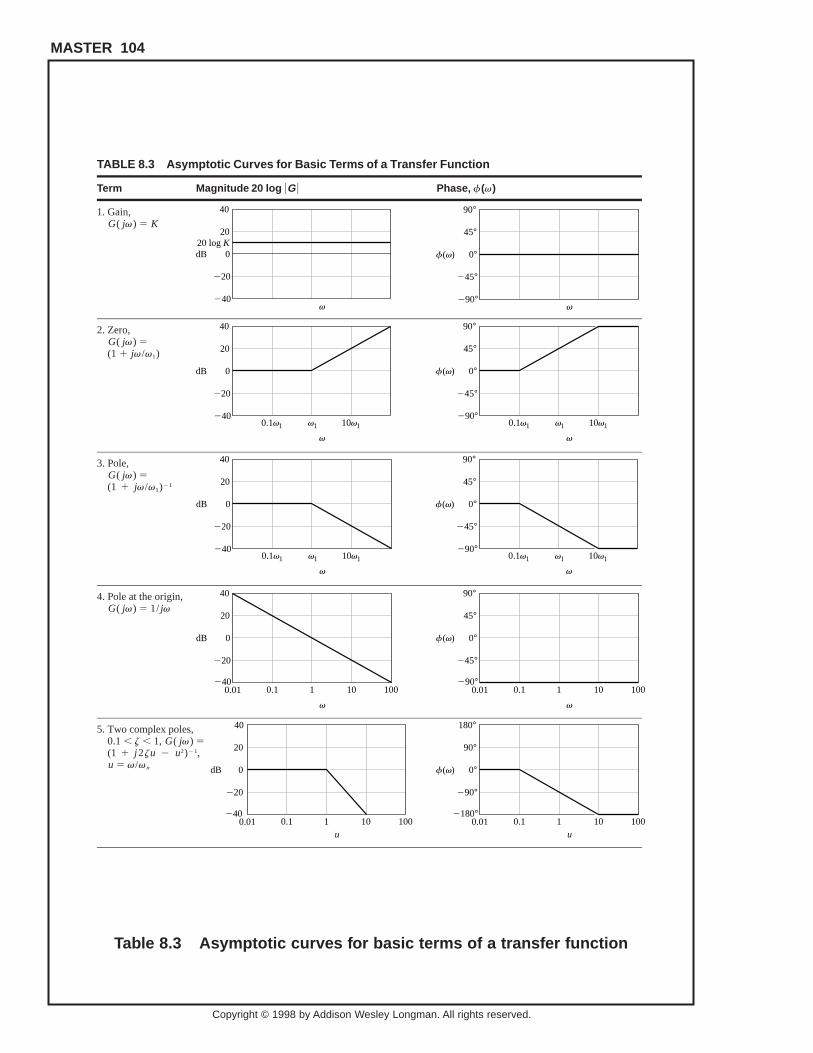
TABLE 8.3 Asymptotic Curves for Basic Terms of a Transfer Function
Term Magnitude 20 log uG u Phase, f (v )
1. Gain,G( jv ) 5 K
v
40
20
0
220
240
dB20 log K
v
90°
45°
0°
245°
290°
f(v)
2. Zero,G( jv ) 5(1 1 jv /v1)
v
0.1v1 v1 10v1
40
20
0
220
240
dB
v
0.1v1 v1 10v1
90°
45°
0°
245°
290°
f(v)
3. Pole,G( jv ) 5
11(1 1 jv /v )1
v
0.1v1 v1 10v1
40
20
0
220
240
dB
v
0.1v1 v1 10v1
90°
45°
0°
245°
290°
f(v)
4. Pole at the origin,G( jv ) 5 1/ jv
v
0.1 10 10010.01
40
20
0
220
240
dB
0.1 10 10010.01
v
90°
45°
0°
245°
290°
f(v)
5. Two complex poles,0.1 , z , 1, G( jv ) 5
,2 11(1 1 j2zu 1 u )u 5 v /v n
u0.1 10 10010.01
40
20
0
220
240
dB
0.1 10 10010.01u
180°
90°
0°
290°
2180°
f(v)
Table 8.3 Asymptotic curves for basic terms of a transfer function
Recommended

















