5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 1/68
moteurs pas à pas
SOMMAIRE
Les Moteurs pas à pas :
Les moteurs à réluctance variable
Les moteurs bipolaires
Les moteurs unipolaires
La commande des moteurs pas à pas :
Les circuits spécialisés
Le circuit intégré TEA3717
Le circuit intégré MC3479C
Les circuits intégré L297 et L298
Annexes
Différents type de moteurs pas à pas
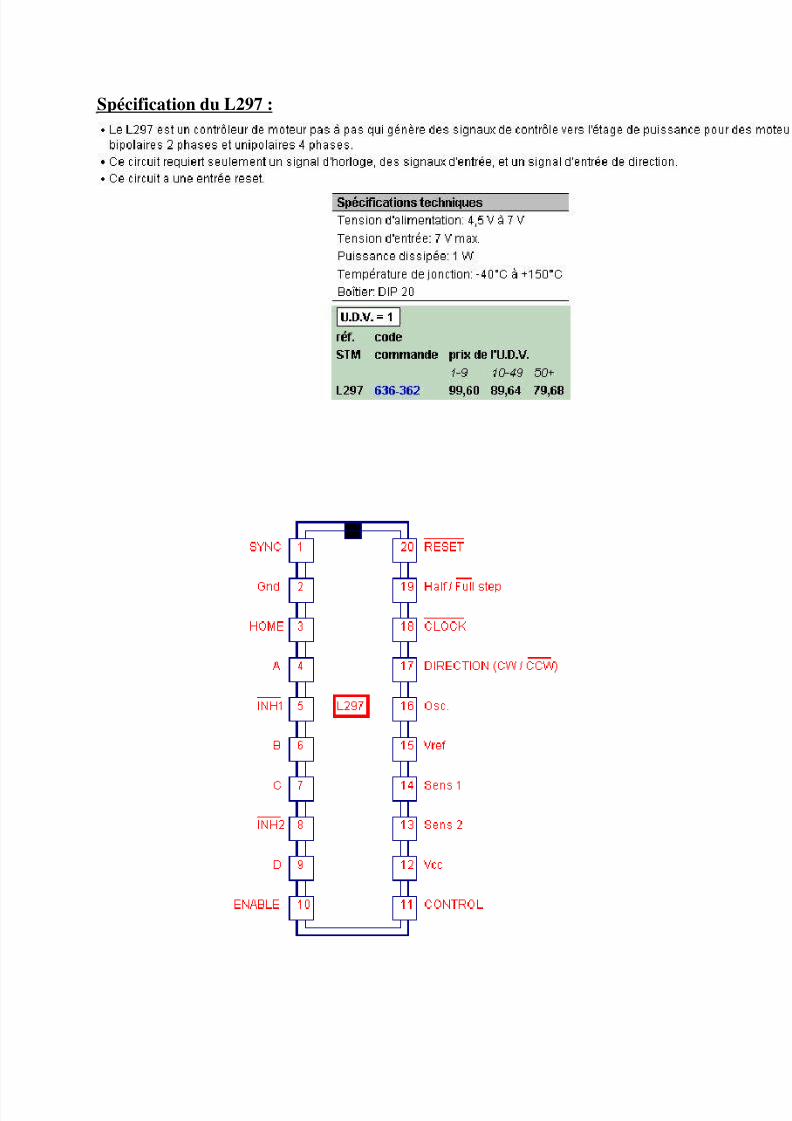
Spécification du L297
Spécification du L298
Les moteurs pas à pas
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 2/68
Les moteurs pas à pas se divisent en deux catégories :
les moteurs à aimants permanents
les moteurs à réluctance variable
Les moteurs à aimants permanents se subdivisent en deux type principaux :
les moteurs bipolaires les moteurs unipolaires
Mais qu’ils soient d’un type ou d’un autre, le résultat recherché est l’avance d’unseul pas à chaque impulsion que le moteur recevra, c’est à dire que son axe
effectuera à chaque pas une rotation d’un angle déterminé. Cet angle, selon lemoteur, peut varier dans de grande proportion :
il peut avoir une valeur comprise entre 0,9° et 90°. Les valeurs les pluscouramment rencontrées sont :
0,9° soit 400 pas par tour
1,8° soit 200 pas par tour
3,6° soit 100 pas par tour
7,5° soit 48 pas par tour
15° soit 24 pas par tour
Il va sans dire que la précision de ces moteurs est infiniment grande et que leur
usure mécanique est pratiquement inexistante, ce qui les rend tout à fait adaptés au
matériel informatique :
lecteurs de disquettes
disques durs
imprimantes
…
On les utilise également en robotique où une précision inférieure au 1/100e de mm
est recherchée. Les tensions d’alimentation utilisées par les moteurs pas à pas et lecourant consommé sont d’une valeur extrêmement variables. D’une façon générale,
la gamme s’étend de 3 à 4 volts et quelque dizaines de mA à plusieurs dizaines devolts et plusieurs ampères. Il est évident qu’un moteur consommant plusieurs
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 3/68
ampères représentera un couple plus important qu’un moteur ne consommant
qu’une centaine de mA. Le couple peut-être mesuré en kg par cm, ce qui équivaut
au poids en kilogramme que pourra soulever un moteur dont l’axe sera muni d’un
bras de longueur exprimé en centimètres.
Les moteurs récupérés dans le matériel informatique ne présentent pas un couple
important (quelques dizaine de grammes par cm), et il conviendra d’opérer, à l’aidede pignons, une réduction de la vitesse de rotation afin d’en augmenter la force.
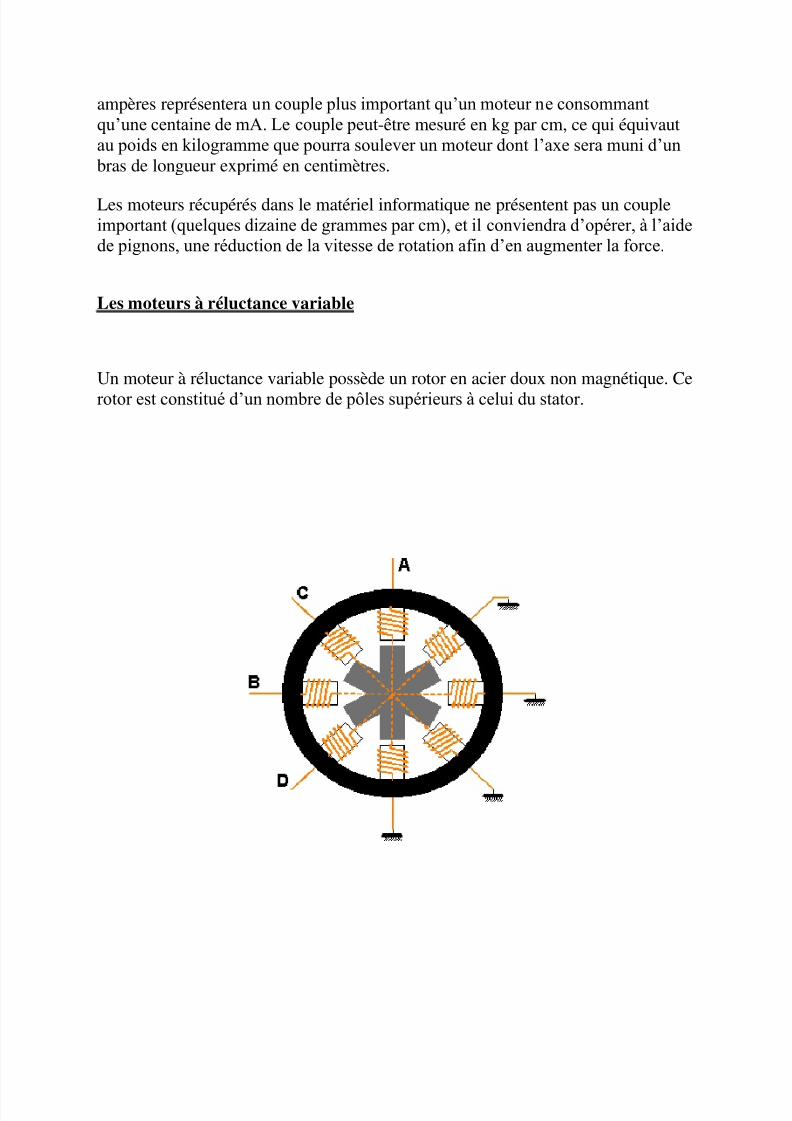
Les moteurs à réluctance variable
Un moteur à réluctance variable possède un rotor en acier doux non magnétique. Ce
rotor est constitué d’un nombre de pôles supérieurs à celui du stator.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 4/68
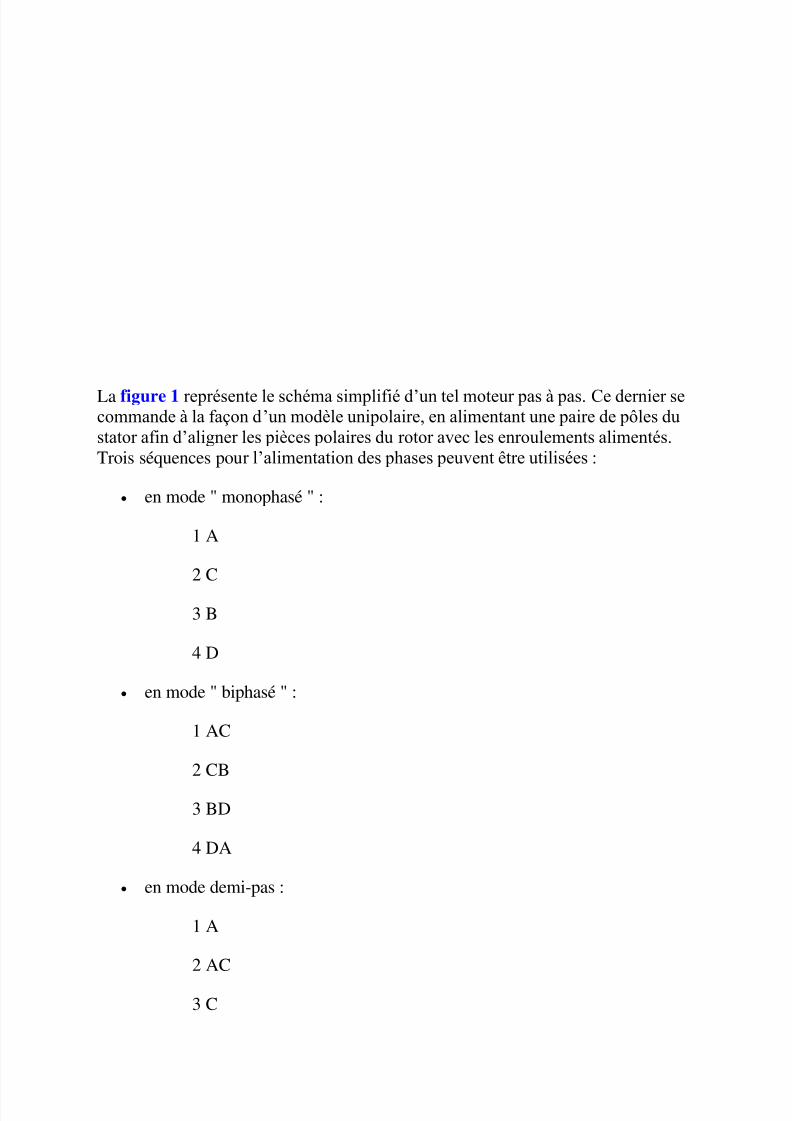
La figure 1 représente le schéma simplifié d’un tel moteur pas à pas. Ce dernier secommande à la façon d’un modèle unipolaire, en alimentant une paire de pôles du
stator afin d’aligner les pièces polaires du rotor avec les enroulements alimentés.
Trois séquences pour l’alimentation des phases peuvent être utilisées :
en mode " monophasé " :
1 A
2 C
3 B
4 D
en mode " biphasé " :
1 AC
2 CB
3 BD
4 DA
en mode demi-pas :
1 A
2 AC
3 C
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 5/68
4 BC
5 B
6 BD
7 D
8 DA
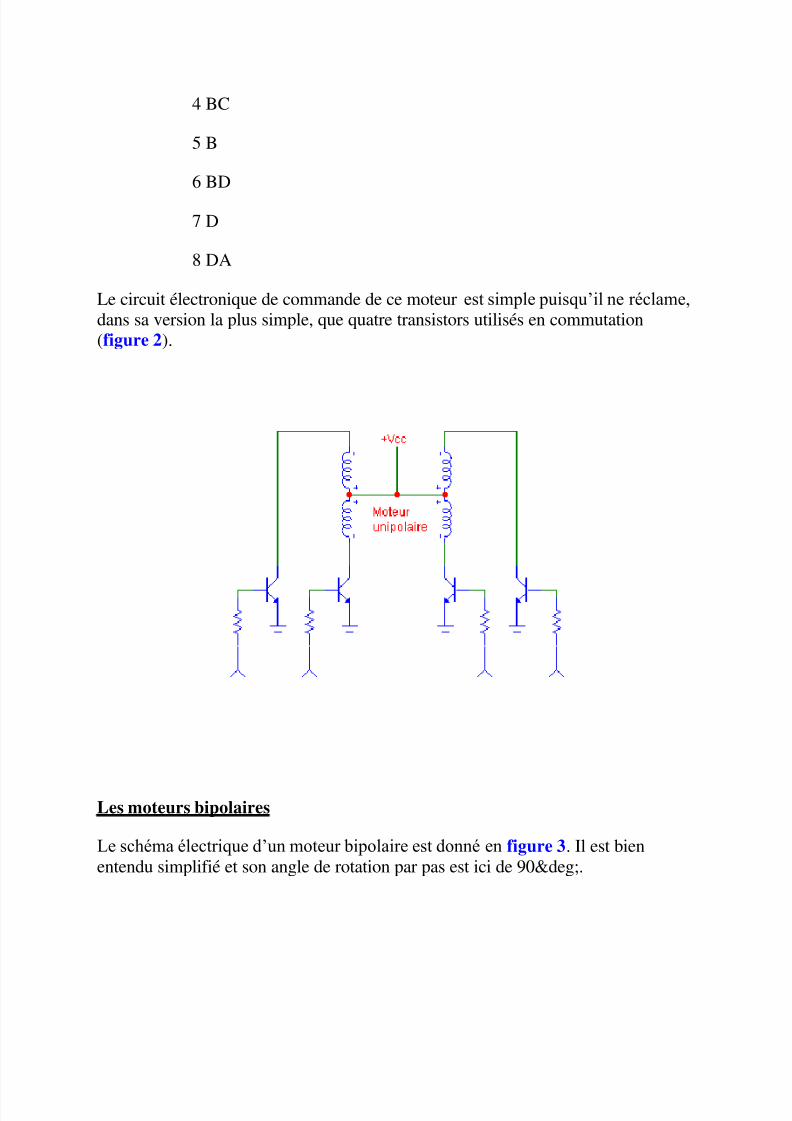
Le circuit électronique de commande de ce moteur est simple puisqu’il ne réclame,dans sa version la plus simple, que quatre transistors utilisés en commutation
(figure 2).
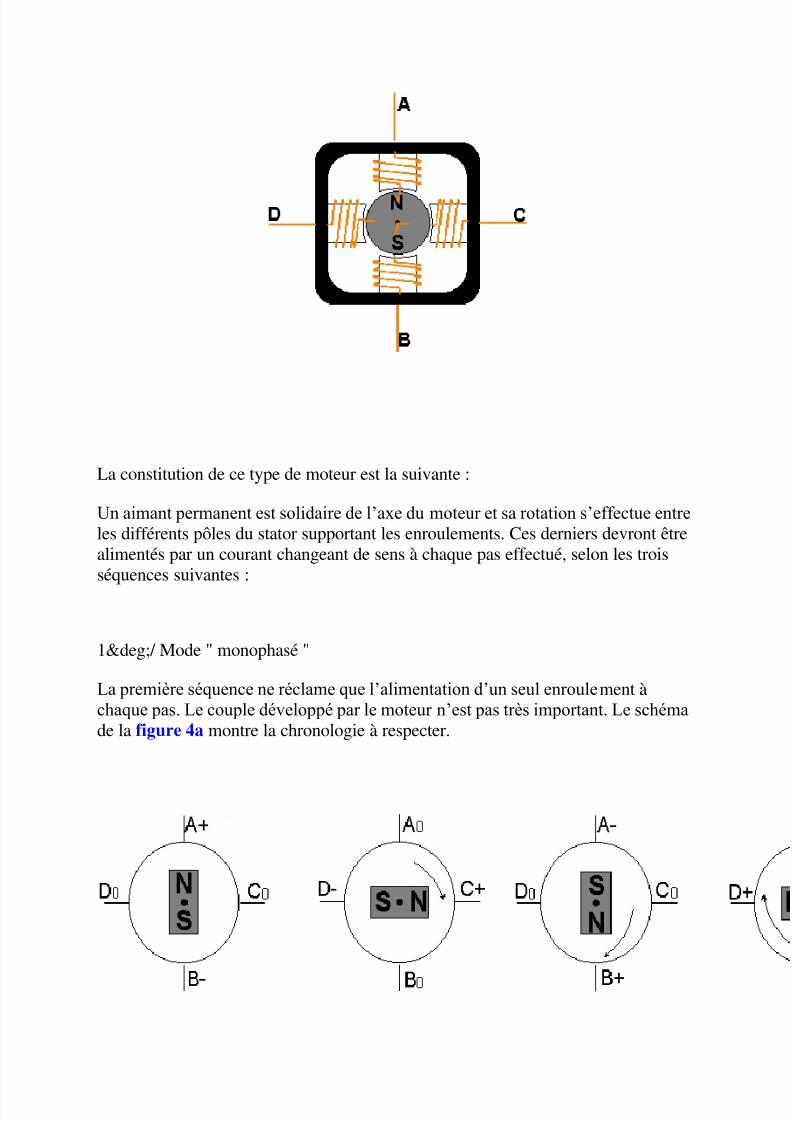
Les moteurs bipolaires
Le schéma électrique d’un moteur bipolaire est donné en figure 3. Il est bien
entendu simplifié et son angle de rotation par pas est ici de 90°.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 6/68
La constitution de ce type de moteur est la suivante :
Un aimant permanent est solidaire de l’axe du moteur et sa rotation s’effectue entreles différents pôles du stator supportant les enroulements. Ces derniers devront être
alimentés par un courant changeant de sens à chaque pas effectué, selon les trois
séquences suivantes :
1°/ Mode " monophasé "
La première séquence ne réclame que l’alimentation d’un seul enroulement à
chaque pas. Le couple développé par le moteur n’est pas très important. Le schéma
de la figure 4a montre la chronologie à respecter.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 7/68
On alimente :
AB
CD
BA
DC
AB
…
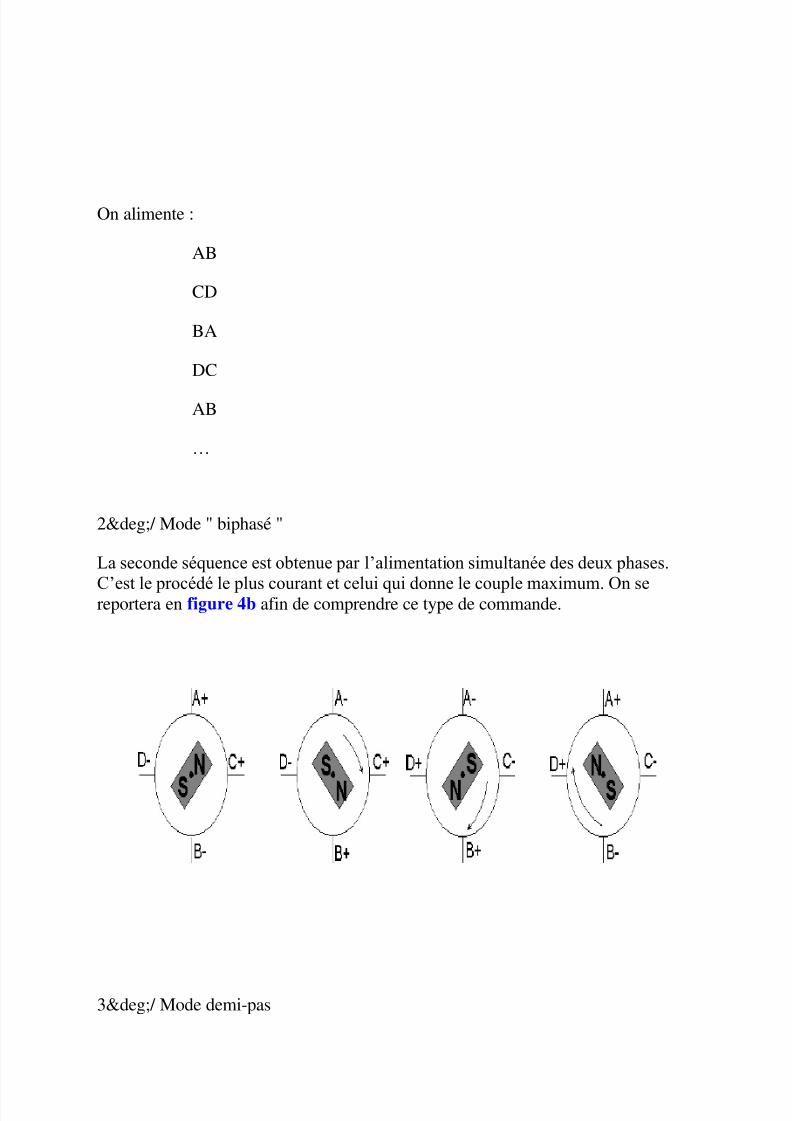
2°/ Mode " biphasé "
La seconde séquence est obtenue par l’alimentation simultanée des deux phases.
C’est le procédé le plus courant et celui qui donne le couple maximum. On sereportera en figure 4b afin de comprendre ce type de commande.
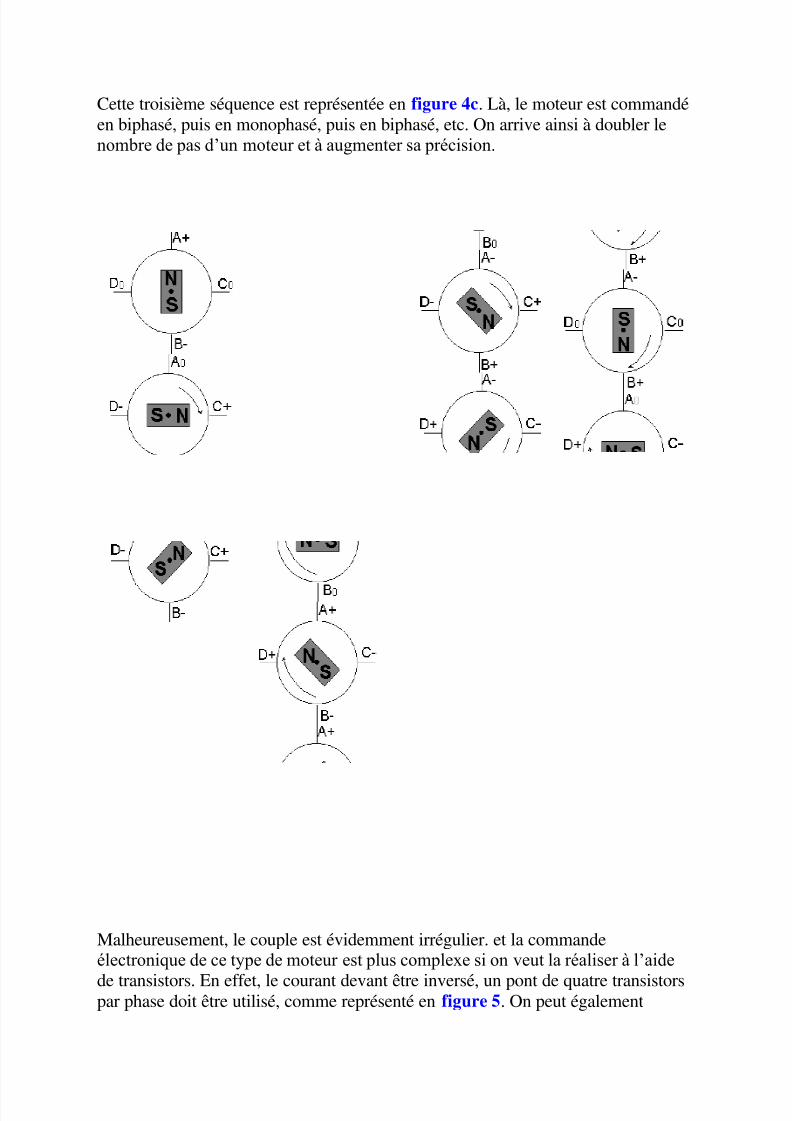
3°/ Mode demi-pas
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 8/68
Cette troisième séquence est représentée en figure 4c. Là, le moteur est commandé
en biphasé, puis en monophasé, puis en biphasé, etc. On arrive ainsi à doubler le
nombre de pas d’un moteur et à augmenter sa précision.
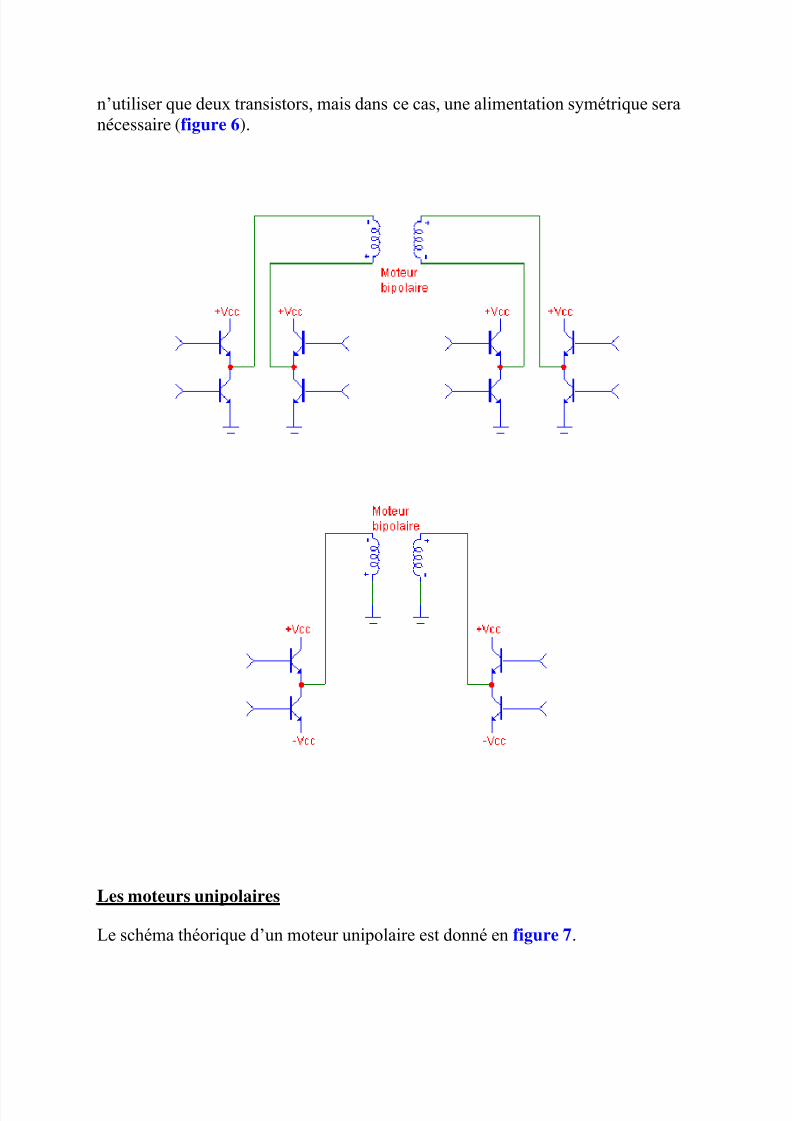
Malheureusement, le couple est évidemment irrégulier. et la commandeélectronique de ce type de moteur est plus complexe si on veut la réaliser à l’aide
de transistors. En effet, le courant devant être inversé, un pont de quatre transistorspar phase doit être utilisé, comme représenté en figure 5. On peut également
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 9/68
n’utiliser que deux transistors, mais dans ce cas, une alimentation symétrique sera
nécessaire (figure 6).
Les moteurs unipolaires
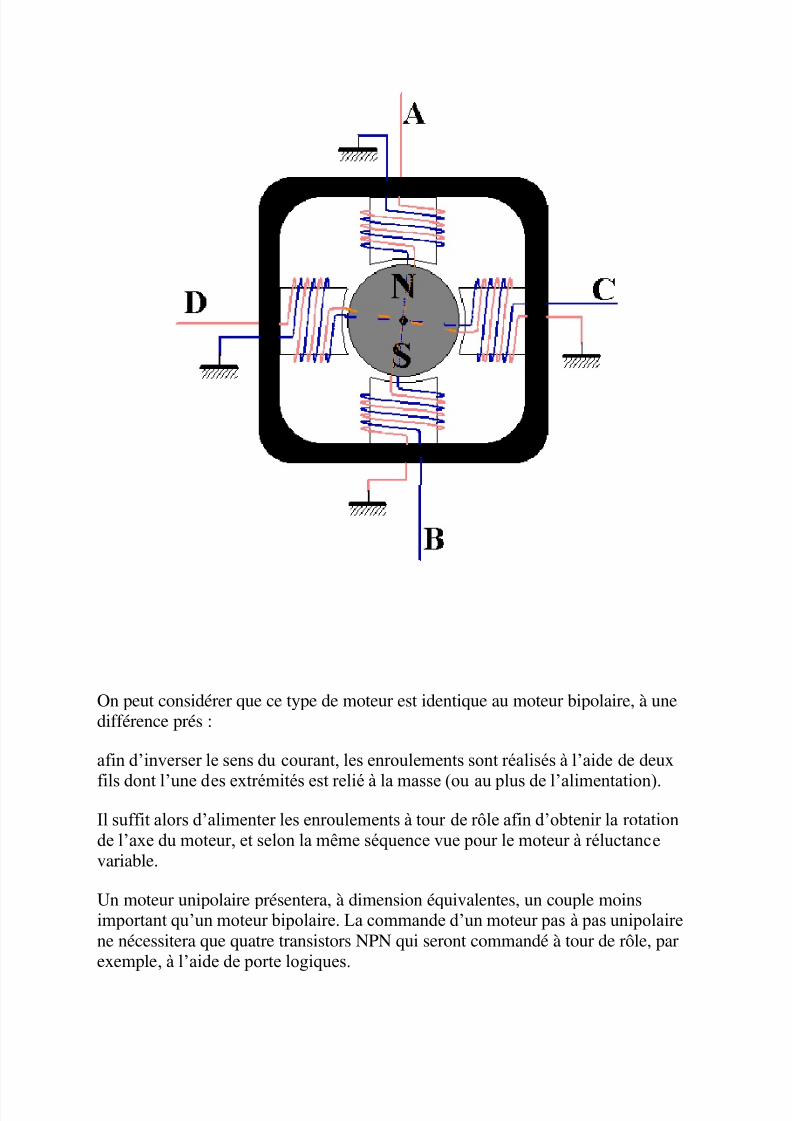
Le schéma théorique d’un moteur unipolaire est donné en figure 7.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 10/68
On peut considérer que ce type de moteur est identique au moteur bipolaire, à unedifférence prés :
afin d’inverser le sens du courant, les enroulements sont réalisés à l’aidede deux
fils dont l’une des extrémités est relié à la masse (ou au plus de l’alimentation).
Il suffit alors d’alimenter les enroulements à tour de rôle afin d’obtenir la rotation
de l’axe du moteur, et selon la même séquence vue pour le moteur à réluctancevariable.
Un moteur unipolaire présentera, à dimension équivalentes, un couple moinsimportant qu’un moteur bipolaire. La commande d’un moteur pas à pas unipolaire
ne nécessitera que quatre transistors NPN qui seront commandé à tour de rôle, parexemple, à l’aide de porte logiques.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 11/68
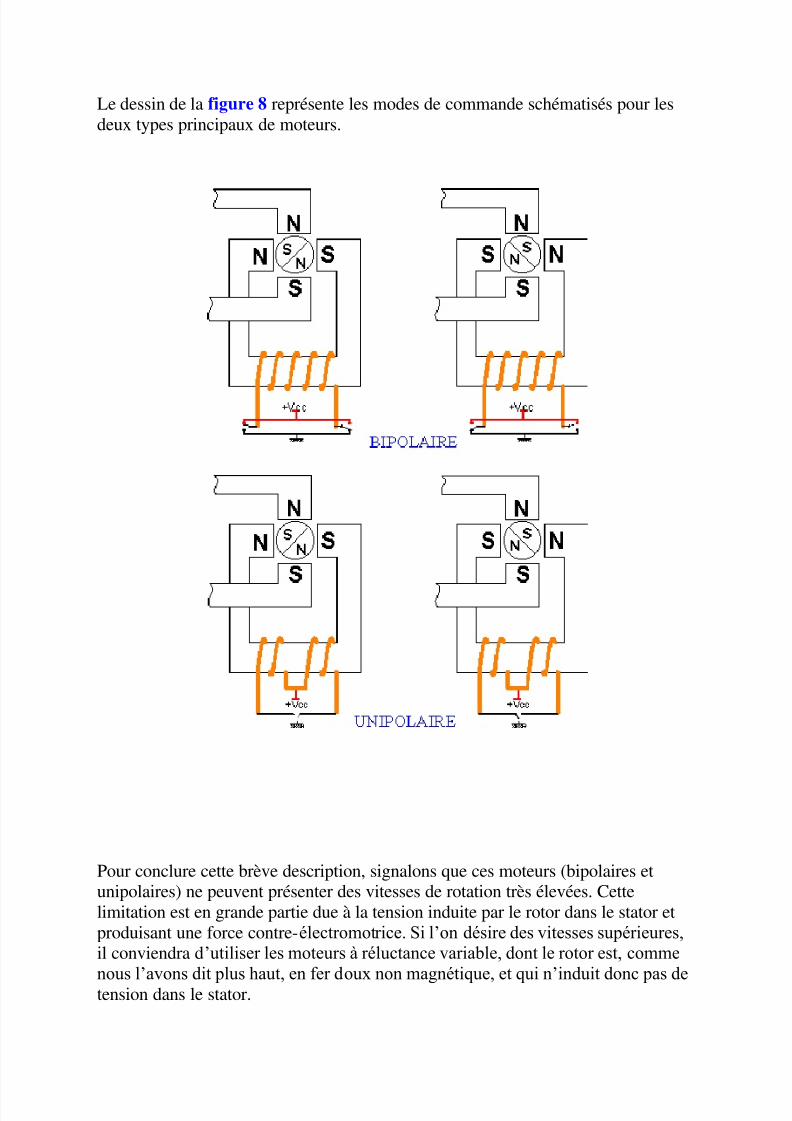
Le dessin de la figure 8 représente les modes de commande schématisés pour les
deux types principaux de moteurs.
Pour conclure cette brève description, signalons que ces moteurs (bipolaires etunipolaires) ne peuvent présenter des vitesses de rotation très élevées. Cette
limitation est en grande partie due à la tension induite par le rotor dans le stator et
produisant une force contre-électromotrice. Si l’on désire des vitesses supérieures,il conviendra d’utiliser les moteurs à réluctance variable, dont le rotor est, comme
nous l’avons dit plus haut, en fer doux non magnétique, et qui n’induit donc pas detension dans le stator.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 12/68
La commande des moteurs pas à pas :
Les circuits intégrés spécialisés
Il est facile, comme nous le verrons dans les pages suivantes consacrées auxmontages pratiques, de réaliser une commande électronique de moteur pas à pas à
l’aide de commande de composants discrets :
Des transistors de puissances commandés par des portes logiques avec un dispositif
de limitation de courant. Mais il est encore plus simple d’utiliser des circuits
intégrés spécialisés, circuits ne nécessitant que quelques composants externes etsimplifiant au maximum l’envoi des séquences de commande. Ils disposent en
outre de toutes les fonctions telles que le sens de rotation, le mode demi-pas, la
mise en haute impédance des sorties (moteur libre), etc.
Nous vous proposons maintenant la présentation de quatre d’entre eux, choisisparmi les plus utilisés, et donc facilement disponibles. Cette présentation permettra
une mise en œuvre facile des circuits présentés.
Le circuit intégré TEA3717
Caractéristiques générales :
mode demi-pas et pas entier commande bipolaire du moteur pas à pas pour un rendement maximum
diodes de protection interne
large gamme du courant de sortie de 5mA à 1A
tout particulièrement désigné pour une utilisation avec une tension
d’alimentation du moteur non stabilisée
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 13/68
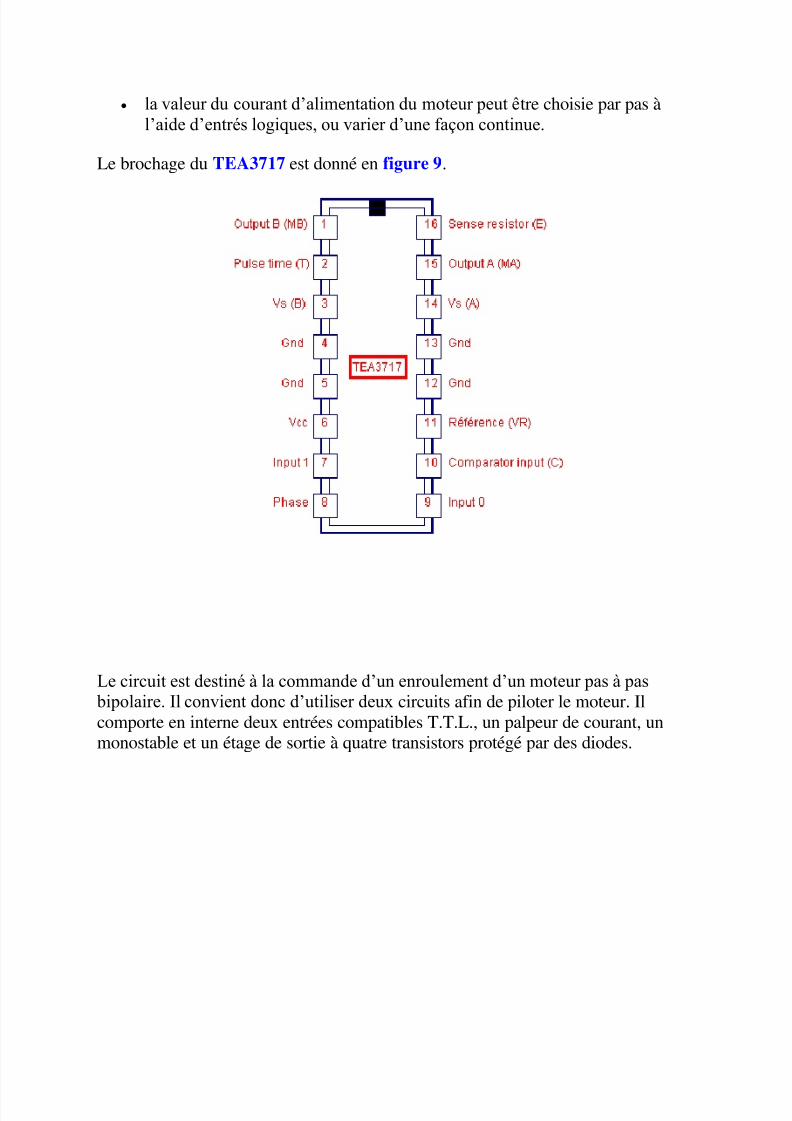
la valeur du courant d’alimentation du moteur peut être choisie par pas à
l’aide d’entrés logiques, ou varier d’une façon continue.
Le brochage du TEA3717 est donné en figure 9.
Le circuit est destiné à la commande d’un enroulement d’un moteur pas à pas bipolaire. Il convient donc d’utiliser deux circuits afin de piloter le moteur. Il
comporte en interne deux entrées compatibles T.T.L., un palpeur de courant, unmonostable et un étage de sortie à quatre transistors protégé par des diodes.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 14/68
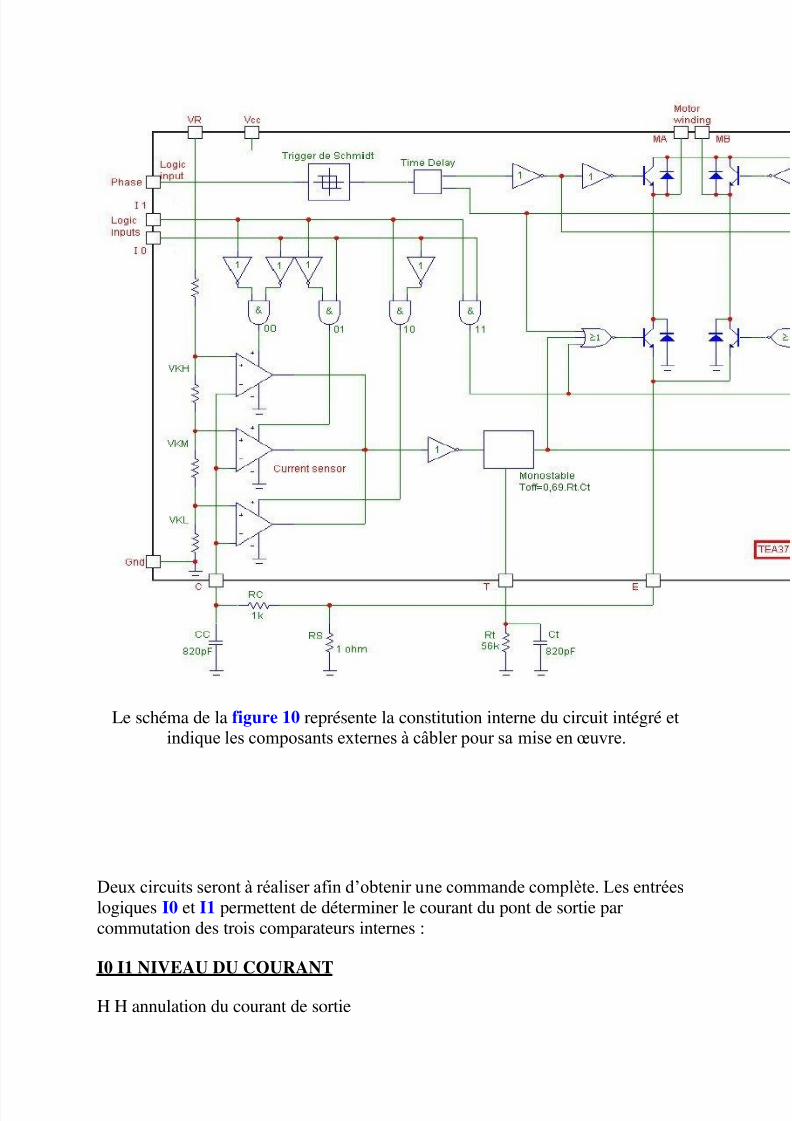
Le schéma de la figure 10 représente la constitution interne du circuit intégré etindique les composants externes à câbler pour sa mise en œuvre.
Deux circuits seront à réaliser afin d’obtenir une commande complète. Les entréeslogiques I0 et I1 permettent de déterminer le courant du pont de sortie par
commutation des trois comparateurs internes :
I0 I1 NIVEAU DU COURANT
H H annulation du courant de sortie
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 15/68
L H courant faible
H L courant moyen
L L courant maximum
La valeur du courant traversant le bobinage du moteur dépend également de lavaleur de la tension de référence appliquée sur l’entrée VR et de la valeur de larésistance RS (du palpeur de courant). Ce palpeur de courant, outre la résistance
RS, est constitué d’un filtre passe- bas et de trois comparateurs. Seul l’un de cesderniers peut être actif dans le même temps.
La limitation de courant fonctionne de la façon suivante :
Le courant traversant l’enroulement du moteur traverse également la résistanceRS.
Lorsque le courant a augmenté de telle sorte que la tension aux bornes de la
résistance devient supérieure à la tension de référence appliquée sur l’une desentrées du comparateur sélectionné, la sortie de ce dernier passe à l’état haut ce quienclenche le monostable. Le courant est alors annulé durant une durée fixe appelée
Toff . Cette durée est donnée par la formule :
Toff=0,69.Rt.Ct
Lorsque la durée de fonctionnement du monostable est achevée, sa sortie repasse àl’état bas et le courant est rétabli dans l’enroulement du moteur jusqu'à un nouvel
enclenchement. L’étage de sortie est constitué de quatre transistors darlingtonconnectés en pont. Les deux transistors qui seront commutés alimenterontl’enroulement du moteur, lui délivrant un courantconstant.
Le circuit intégré MC3479C
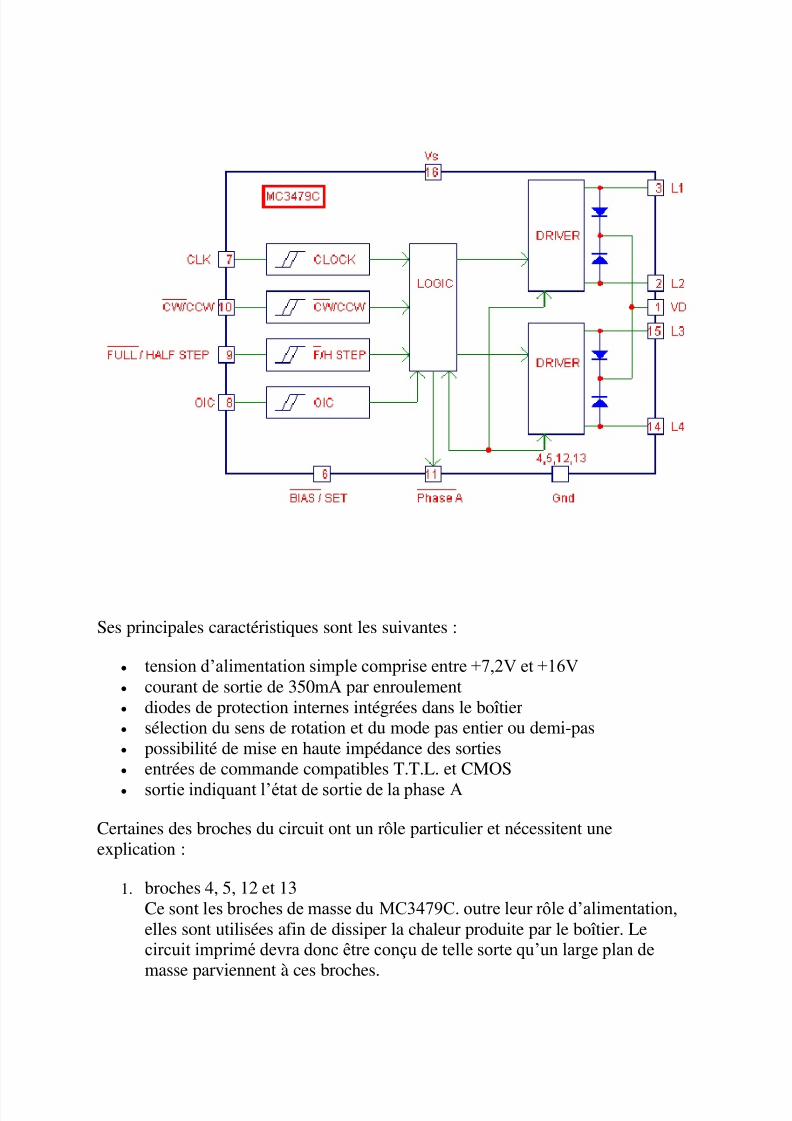
Le circuit intégré MC3479C permet le pilotage d’un moteur pas à pas bipolaire. Un
seul circuit est nécessaire. Il est constitué de quatre entrées (au standard T.T.L.) desélection commandant un circuit logique. Ce circuit pilote deux drivers de
puissance auxquels sont connectés les deux enroulements du moteur bipolaire. Le
dessin de la figure 11 représente le schéma interne du MC3479C ainsi que sonbrochage.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 16/68
Ses principales caractéristiques sont les suivantes :
tension d’alimentation simple comprise entre +7,2V et +16V
courant de sortie de 350mA par enroulement diodes de protection internes intégrées dans le boîtier
sélection du sens de rotation et du mode pas entier ou demi-pas
possibilité de mise en haute impédance des sorties
entrées de commande compatibles T.T.L. et CMOS
sortie indiquant l’état de sortie de la phase A
Certaines des broches du circuit ont un rôle particulier et nécessitent une
explication :
1. broches 4, 5, 12 et 13
Ce sont les broches de masse du MC3479C. outre leur rôle d’alimentation,
elles sont utilisées afin de dissiper la chaleur produite par le boîtier. Lecircuit imprimé devra donc être conçu de telle sorte qu’un large plan de
masse parviennent à ces broches.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 17/68
2. broche 1
Connexion d’une diode de clamp. Cette entrée est utilisée afin de protéger les sorties lorsque des pointes de tension élevées apparaissent lors de la
commutation des enroulements des moteurs. Cette diode doit être connectée
entre la broche 1 et la broche 16 (Vs)
3. broche 6 BIAS/SET
Cette broche est en principe portée à un potentiel de Vs-0.7V. le
courant sortant, à travers une résistance connectée à la masse,détermine le courant maximal disponible aux bornes du moteur. Onpeut ainsi, en faisant varier la valeur de la résistance, diminuer le
courant d’alimentation lorsque le moteur est à l’arrêt. lorsque cette
broche est laissée " en l’air ", les sorties de puissances se trouvent en
état de haute impédance. Les circuits intégrés L297 et L298
Bien que conçus afin de fonctionner conjointement, ces deux circuits peuvent êtreutilisés séparément.
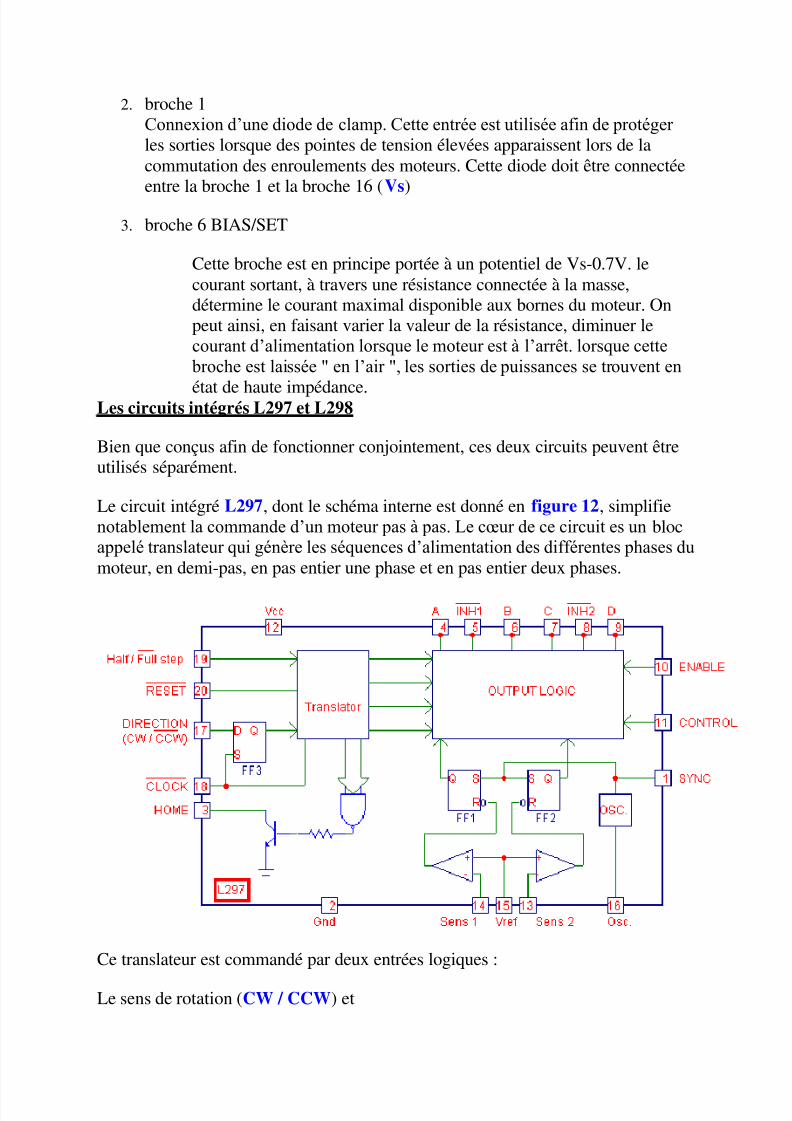
Le circuit intégré L297, dont le schéma interne est donné en figure 12, simplifie
notablement la commande d’un moteur pas à pas. Le cœur de ce circuit es un blocappelé translateur qui génère les séquences d’alimentation des différentes phases du
moteur, en demi-pas, en pas entier une phase et en pas entier deux phases.
Ce translateur est commandé par deux entrées logiques :
Le sens de rotation (CW / CCW) et
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 18/68
le mode de fonctionnement en demi-pas ou en pas normal (Half / Full).
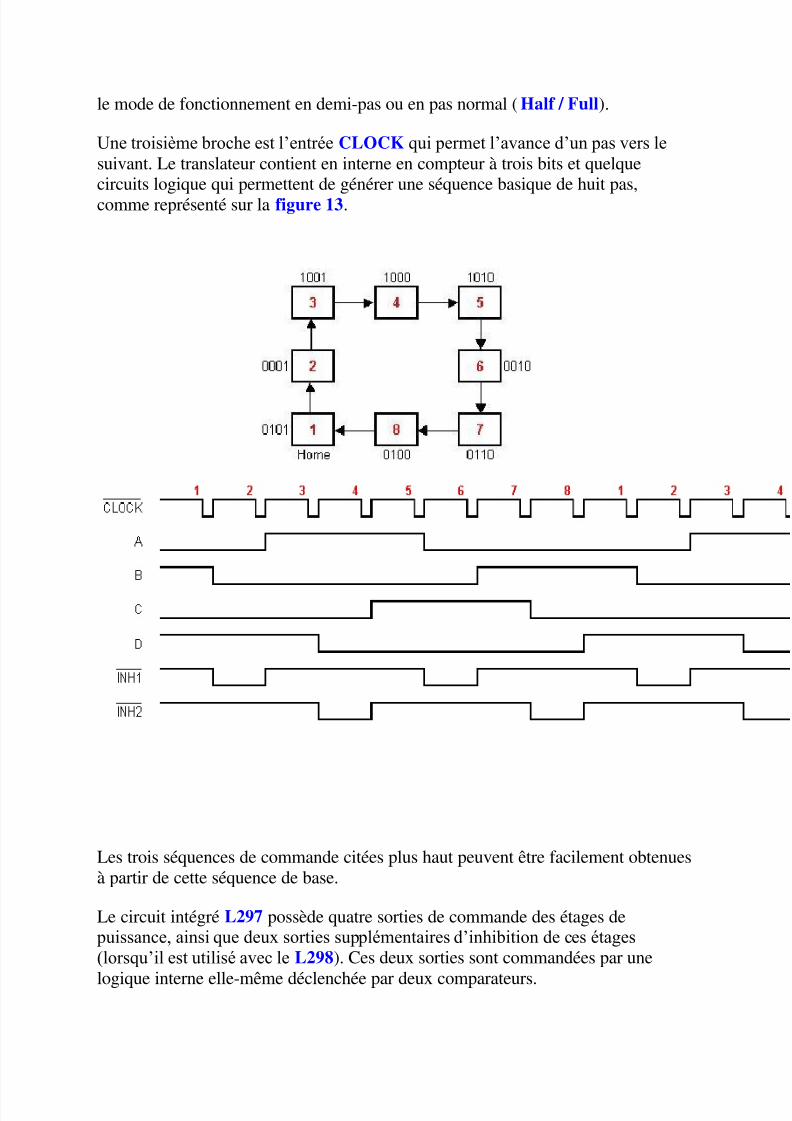
Une troisième broche est l’entrée CLOCK qui permet l’avance d’un pas vers le
suivant. Le translateur contient en interne en compteur à trois bits et quelquecircuits logique qui permettent de générer une séquence basique de huit pas,
comme représenté sur la figure 13.
Les trois séquences de commande citées plus haut peuvent être facilement obtenues
à partir de cette séquence de base.
Le circuit intégré L297 possède quatre sorties de commande des étages de puissance, ainsi que deux sorties supplémentaires d’inhibition de ces étages
(lorsqu’il est utilisé avec le L298). Ces deux sorties sont commandées par une
logique interne elle-même déclenchée par deux comparateurs.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 19/68
Ces deux comparateurs mesurent la valeur de la tension présente aux bornes de
deux résistances due au courant traversant les enroulements du moteur. Lorsque la
valeur de cette tension dépasse celle de la tension de référence, l’alimentation du
moteur est coupé jusqu’à ce que la valeur du courant diminue. Nous avons vu ce
type de fonctionnement dans la description du TEA3717.
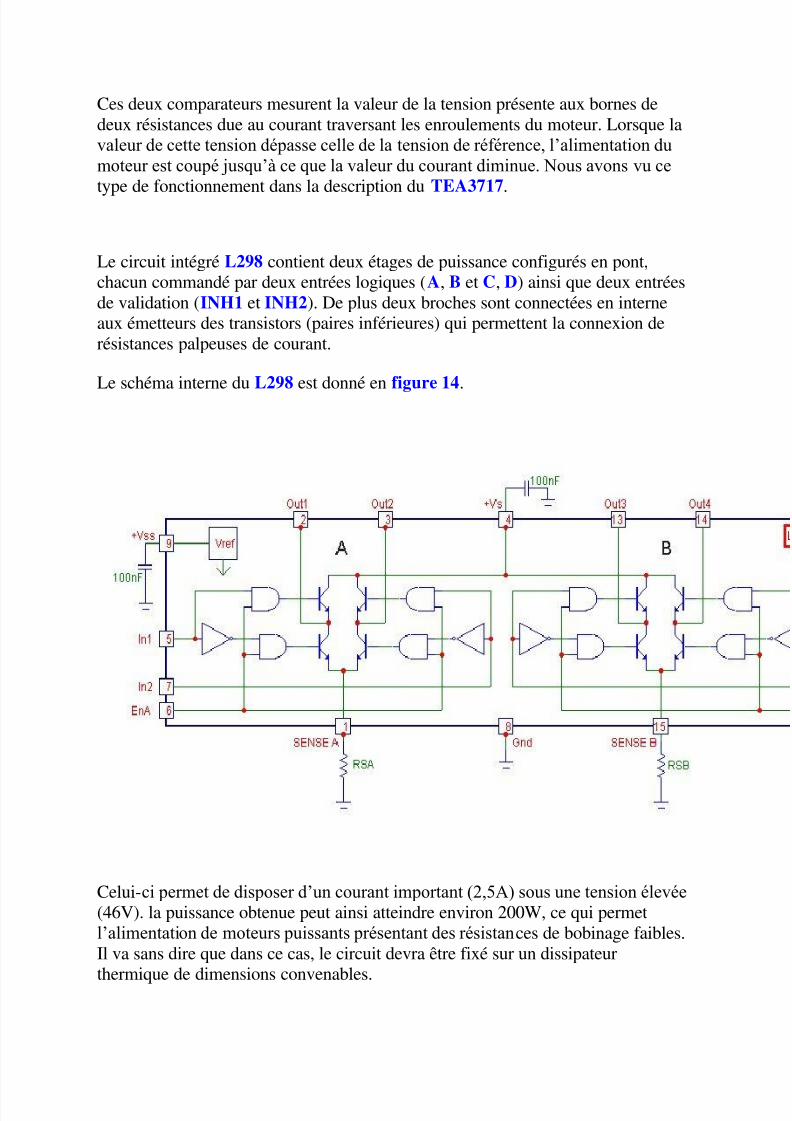
Le circuit intégré L298 contient deux étages de puissance configurés en pont,chacun commandé par deux entrées logiques (A, B et C, D) ainsi que deux entrées
de validation (INH1 et INH2). De plus deux broches sont connectées en interneaux émetteurs des transistors (paires inférieures) qui permettent la connexion de
résistances palpeuses de courant.
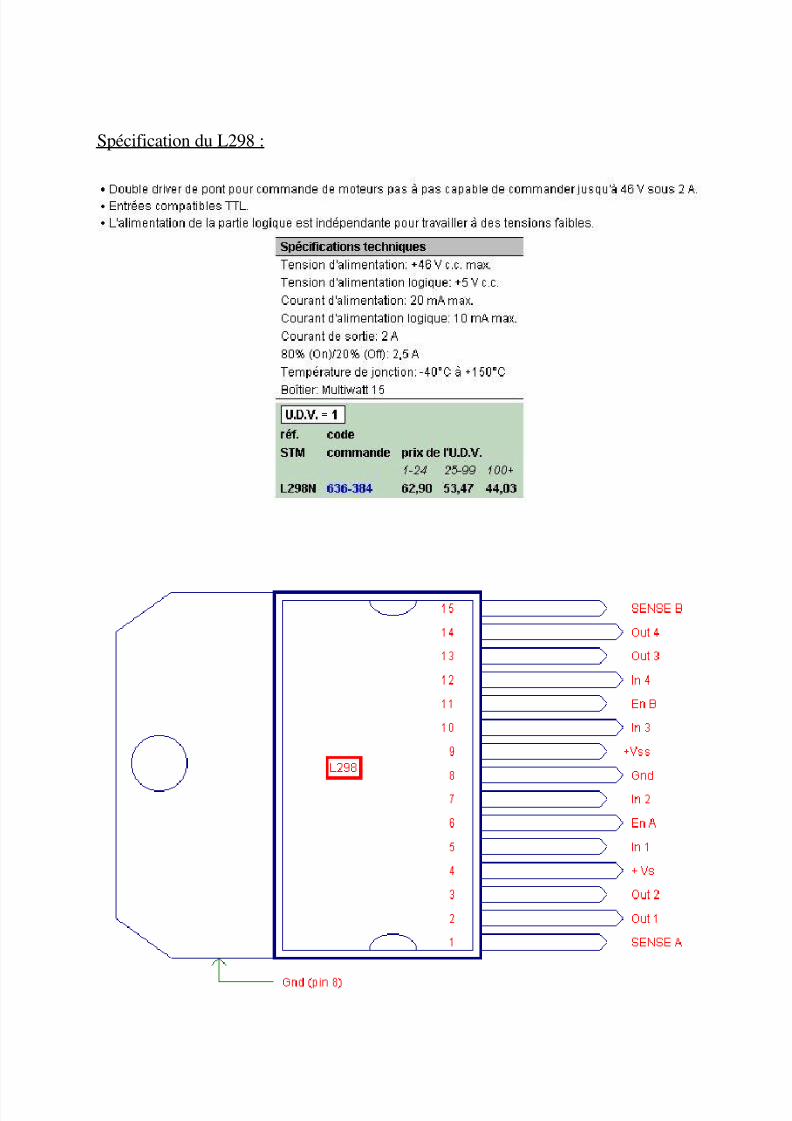
Le schéma interne du L298 est donné en figure 14.
Celui-ci permet de disposer d’un courant important (2,5A) sous une tension élevée(46V). la puissance obtenue peut ainsi atteindre environ 200W, ce qui permet
l’alimentation de moteurs puissants présentant des résistances de bobinage faibles.
Il va sans dire que dans ce cas, le circuit devra être fixé sur un dissipateur
thermique de dimensions convenables.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 20/68
Comme on le constate sur le schéma, le L298 possède deux broches d’alimentation
:
L’une pour le moteur (Vs) et
L’autre pour la logique interne (Vss, +5V)
Ce qui permet de limiter la dissipation du boîtier.
Il est à noter que, contrairement à la majorité des circuits, le L298 ne contient pasles diodes de protections des transistors internes. Il conviendra donc de les câbler à
l’extérieur du boîtier. Ces diodes devront présenter des temps de commutationfaible et devront être capable de laisser passer un courant important.
Le L298 est présenté en boîtier MULTIWATT à 15 broches, ce qui simplifie sa
fixation sur un refroidisseur.
ANNEXES :
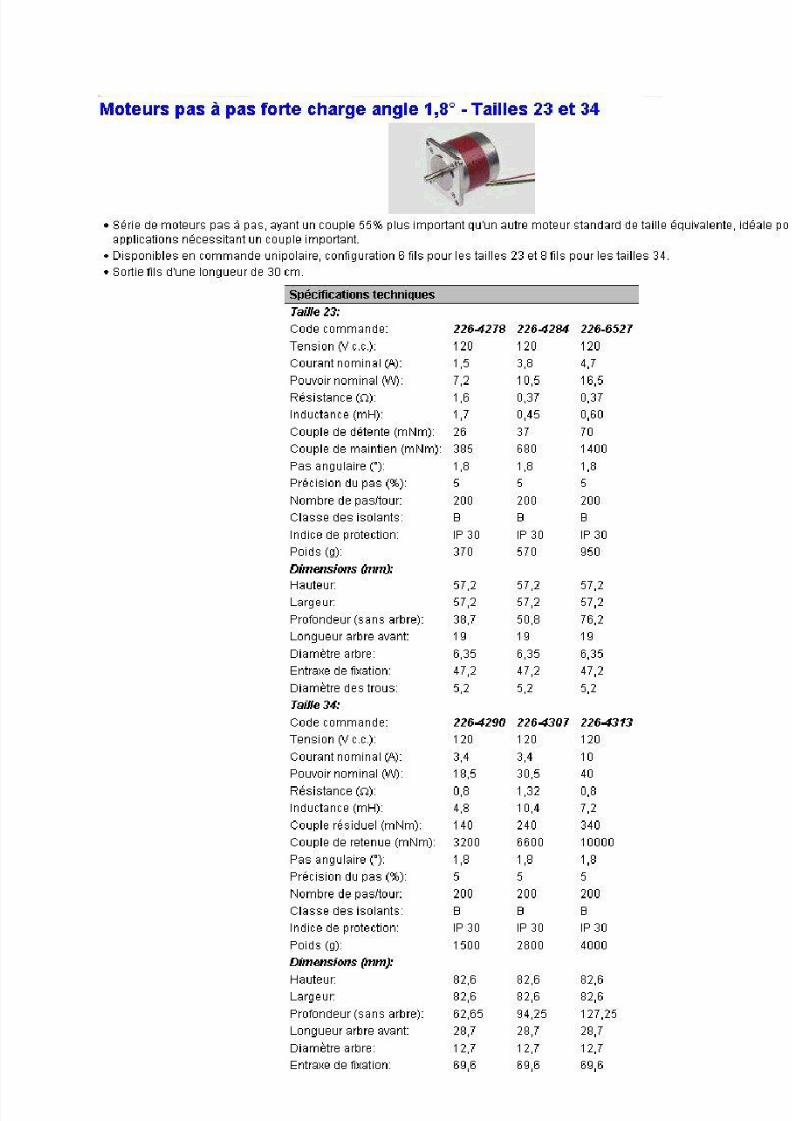
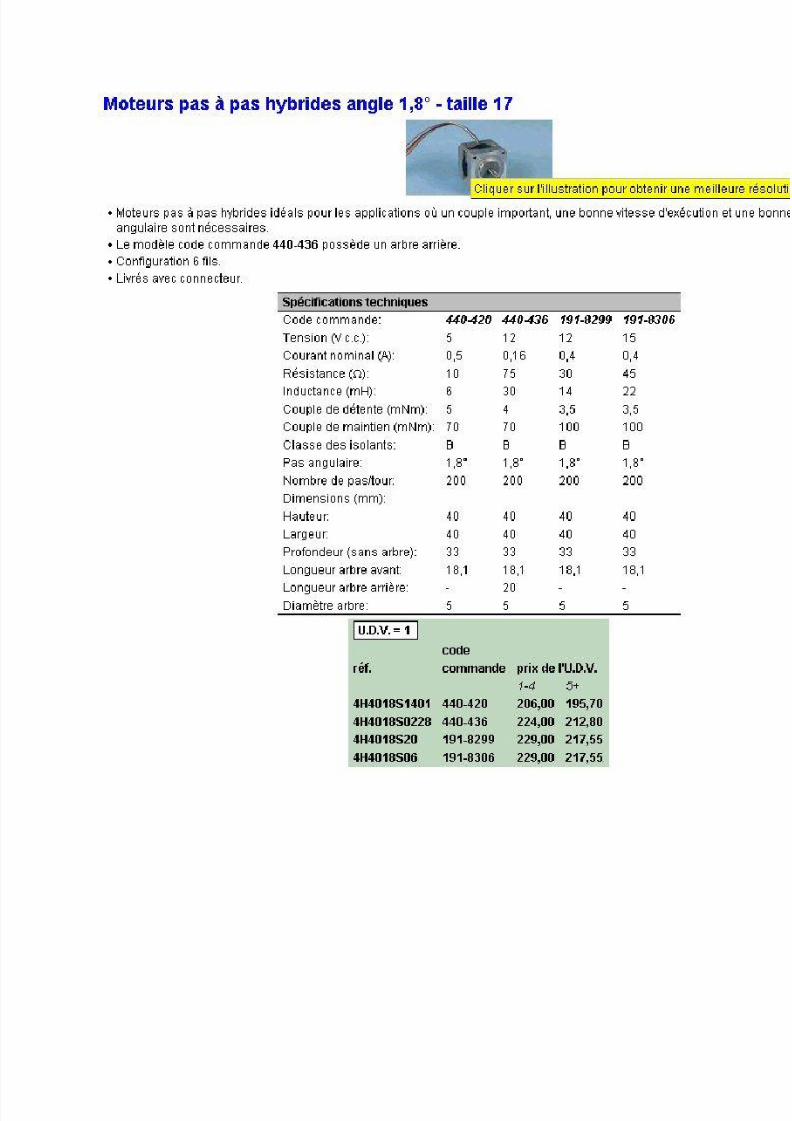
Différents type de moteurs pas à pas :
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 21/68
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 22/68
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 23/68
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 24/68
Spécification du L297 :
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 25/68
Spécification du L298 :

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 26/68
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 27/68
COMMANDE MOTEUR PAS A PAS
ASSERVI EN POSITION PAR FAISCEAUINFRAROUGE (*)
(et programmation d’un PAL 22V10)
Ph Dondon © Copyright 2000
(*) : page référencée par l'Electronique Pratique n°321 novembre 2007 !!!
retour page accueil Ph.Dondon
I) BUT DE LA MANIPULATION
Le but de la manipulation est l'étude de la commande d'un moteur pas à pas asservi en
position par faisceau infrarouge. Un circuit programmable PAL sera programmé au cours de
la séance pour modifier la logique de commande du moteur.
Le synoptique du montage est donné en figure 1.
Figure 1
L'émetteur infrarouge pouvant se déplacer sur un arc de cercle, le moteur pas à pas
doit "suivre" son déplacement. En cas d'absence de cible infrarouge, le moteur se place en
phase de recherche en effectuant un balayage unique sur le demi cercle complet puis se met
en veille. Une relance manuelle du cycle de recherche est toujours possible. Deux
interrupteurs fin de course limitent le mouvement du moteur à un demi cercle. Nous
Moteur pas à pas
Emetteur IR
Récepteurs IR Indic ateur d'angle
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 28/68
étudierons le système de capteur infrarouge, la logique de commande et la commande en
puissance du moteur.
II) SYSTEME INFRAROUGE
II.1) Principe de fonctionnement
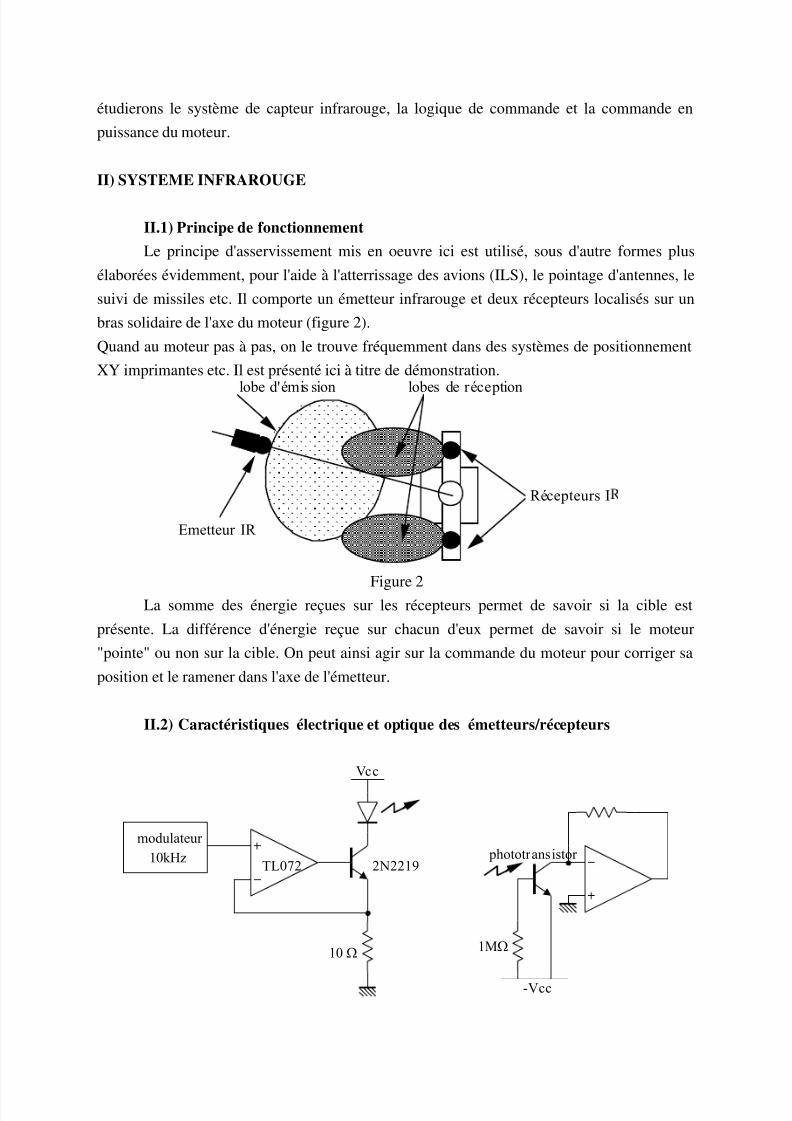
Le principe d'asservissement mis en oeuvre ici est utilisé, sous d'autre formes plus
élaborées évidemment, pour l'aide à l'atterrissage des avions (ILS), le pointage d'antennes, le
suivi de missiles etc. Il comporte un émetteur infrarouge et deux récepteurs localisés sur un
bras solidaire de l'axe du moteur (figure 2).
Quand au moteur pas à pas, on le trouve fréquemment dans des systèmes de positionnement
XY imprimantes etc. Il est présenté ici à titre de démonstration.
Figure 2La somme des énergie reçues sur les récepteurs permet de savoir si la cible est
présente. La différence d'énergie reçue sur chacun d'eux permet de savoir si le moteur
"pointe" ou non sur la cible. On peut ainsi agir sur la commande du moteur pour corriger sa
position et le ramener dans l'axe de l'émetteur.
II.2) Caractéristiques électrique et optique des émetteurs/récepteurs
Emetteur IR
Récepteurs I
lobe d'émis sion lobes de réception
modulateur
10kHz
Vcc
-Vcc
phototransistor
2N2219TL072
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 29/68
Figure 3 Figure 4
Le schéma de l'émetteur est donné figure 3. La longueur d'onde utilisée est de 930nm.
L'émission est modulée en tout ou rien à 10 kHz par un oscillateur NE555. L’amplificateur
opérationnel monté en suiveur avec le transistor 2N2219, permet de fixer le courant (et non
la tension !) traversant la diode émettrice SFH415.
Compte tenu de la distance émetteur / récepteur égale à 8cm et l’écartement des
récepteurs (5cm) l’angle d’ouverture des diodes choisi est de 35°.
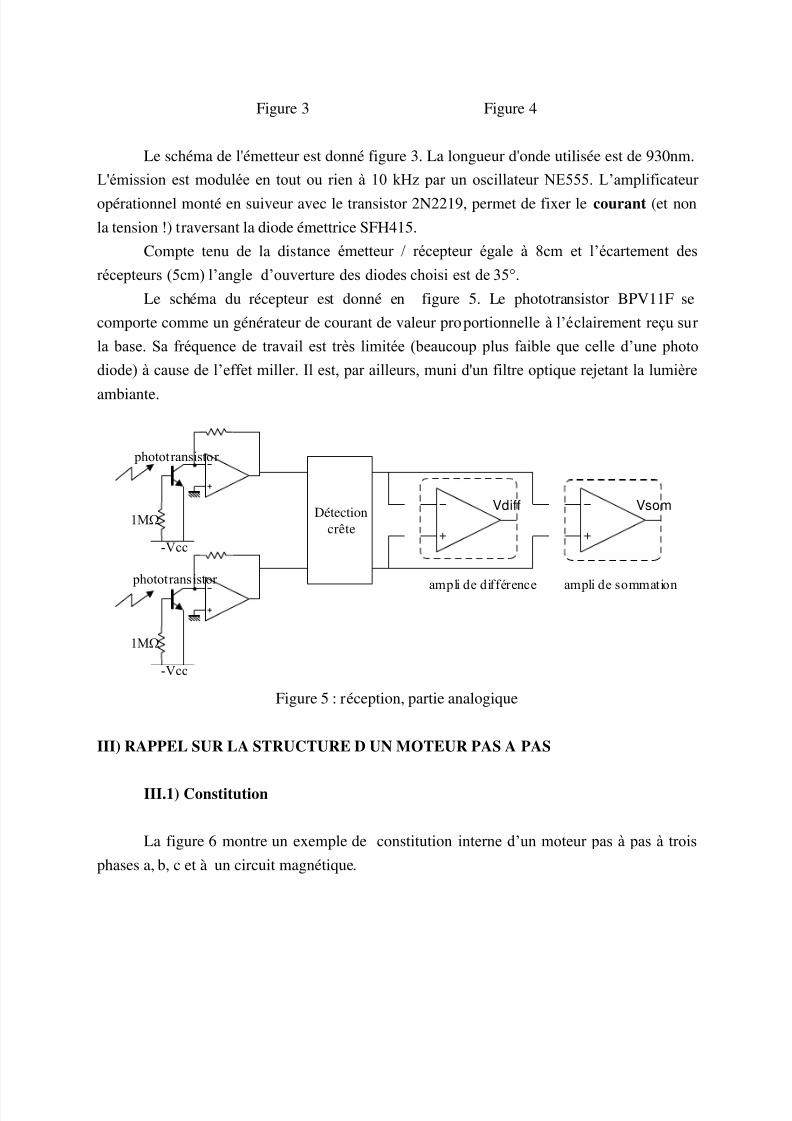
Le schéma du récepteur est donné en figure 5. Le phototransistor BPV11F se
comporte comme un générateur de courant de valeur pro portionnelle à l’éclairement reçu sur
la base. Sa fréquence de travail est très limitée (beaucoup plus faible que celle d’une photo
diode) à cause de l’effet miller. Il est, par ailleurs, muni d'un filtre optique rejetant la lumière
ambiante.
Figure 5 : réception, partie analogique
III) RAPPEL SUR LA STRUCTURE D UN MOTEUR PAS A PAS
III.1) Constitution
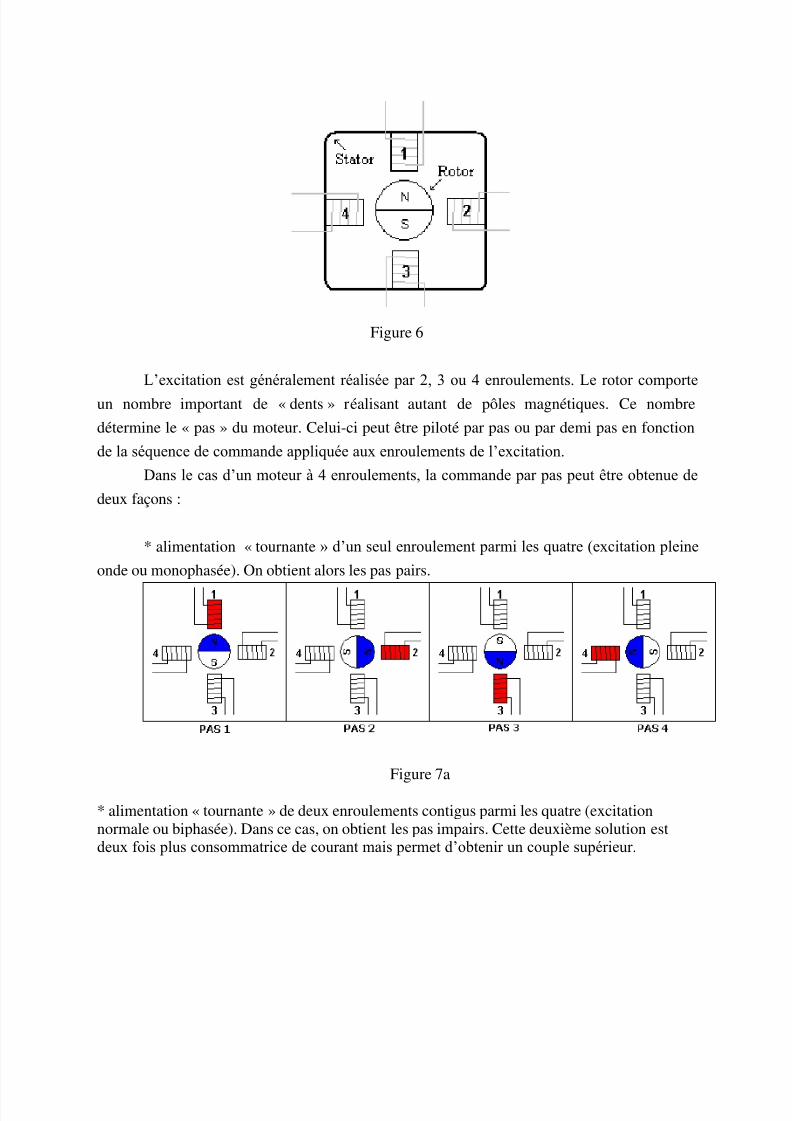
La figure 6 montre un exemple de constitution interne d’un moteur pas à pas à trois
phases a, b, c et à un circuit magnétique.
-Vcc
phototransistor
-Vcc
phototransistor
Détection
crête
ampli de différence ampli de sommation
Vdiff Vsom
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 30/68
Figure 6
L’excitation est généralement réalisée par 2, 3 ou 4 enroulements. Le rotor comporte
un nombre important de « dents » réalisant autant de pôles magnétiques. Ce nombre
détermine le « pas » du moteur. Celui-ci peut être piloté par pas ou par demi pas en fonction
de la séquence de commande appliquée aux enroulements de l’excitation.
Dans le cas d’un moteur à 4 enroulements, la commande par pas peut être obtenue de
deux façons :
* alimentation « tournante » d’un seul enroulement parmi les quatre (excitation pleine
onde ou monophasée). On obtient alors les pas pairs.
Figure 7a
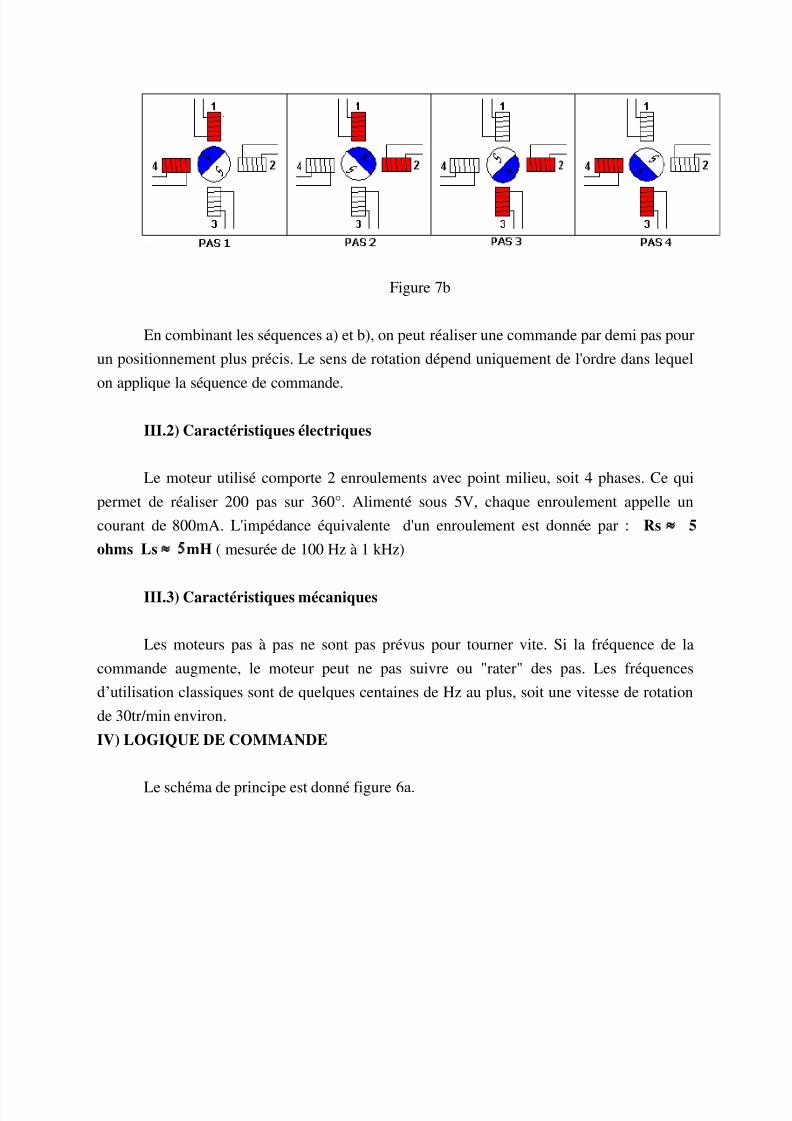
* alimentation « tournante » de deux enroulements contigus parmi les quatre (excitation
normale ou biphasée). Dans ce cas, on obtient les pas impairs. Cette deuxième solution estdeux fois plus consommatrice de courant mais permet d’obtenir un couple supérieur.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 31/68
Figure 7b
En combinant les séquences a) et b), on peut réaliser une commande par demi pas pour
un positionnement plus précis. Le sens de rotation dépend uniquement de l'ordre dans lequel
on applique la séquence de commande.
III.2) Caractéristiques électriques
Le moteur utilisé comporte 2 enroulements avec point milieu, soit 4 phases. Ce qui
permet de réaliser 200 pas sur 360°. Alimenté sous 5V, chaque enroulement appelle un
courant de 800mA. L'impédance équivalente d'un enroulement est donnée par : Rs 5
ohms Ls mH ( mesurée de 100 Hz à 1 kHz)
III.3) Caractéristiques mécaniques
Les moteurs pas à pas ne sont pas prévus pour tourner vite. Si la fréquence de la
commande augmente, le moteur peut ne pas suivre ou "rater" des pas. Les fréquences
d’utilisation classiques sont de quelques centaines de Hz au plus, soit une vitesse de rotation
de 30tr/min environ.
IV) LOGIQUE DE COMMANDE
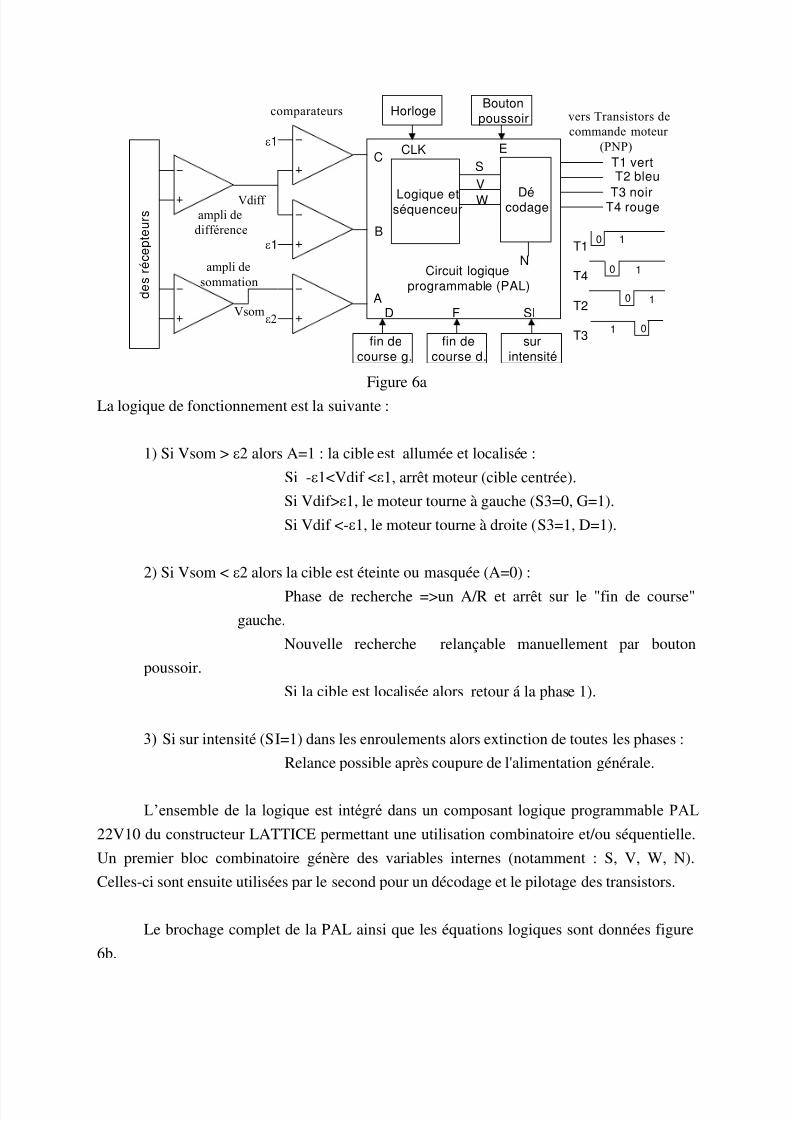
Le schéma de principe est donné figure 6a.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 32/68
Figure 6a
La logique de fonctionnement est la suivante :
1) Si Vsom > 2 alors A=1 : la cible est allumée et localisée :
Si -1<Vdif <1, arrêt moteur (cible centrée).
Si Vdif>1, le moteur tourne à gauche (S3=0, G=1).
Si Vdif <-1, le moteur tourne à droite (S3=1, D=1).
2) Si Vsom < 2 alors la cible est éteinte ou masquée (A=0) :
Phase de recherche =>un A/R et arrêt sur le "fin de course"
gauche.
Nouvelle recherche relançable manuellement par bouton
poussoir.
Si la cible est localisée alors retour á la phase 1).
3) Si sur intensité (SI=1) dans les enroulements alors extinction de toutes les phases :
Relance possible après coupure de l'alimentation générale.
L’ensemble de la logique est intégré dans un composant logique programmable PAL
22V10 du constructeur LATTICE permettant une utilisation combinatoire et/ou séquentielle.
Un premier bloc combinatoire génère des variables internes (notamment : S, V, W, N).
Celles-ci sont ensuite utilisées par le second pour un décodage et le pilotage des transistors.
Le brochage complet de la PAL ainsi que les équations logiques sont données figure
6b.
ampli de
différence
Vdiff
Vsom
ampli de
sommation
comparateurs
T1 vertT2 bleu
T3 noirT4 rouge
vers Transistors de
commande moteur
(PNP)
fin decourse g.
fin decourse d.
Boutonpoussoir
Horloge
surintensité
1
1
d e s
r é c e p t e u r s
A
T1
T4
T2
T3
CLK E
B
C
F SID
Circuit logiqueprogrammable (PAL)
0
0
0
0
1
1
1
1
Décodage
Logique etséquenceur
S
V
W
N
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 33/68
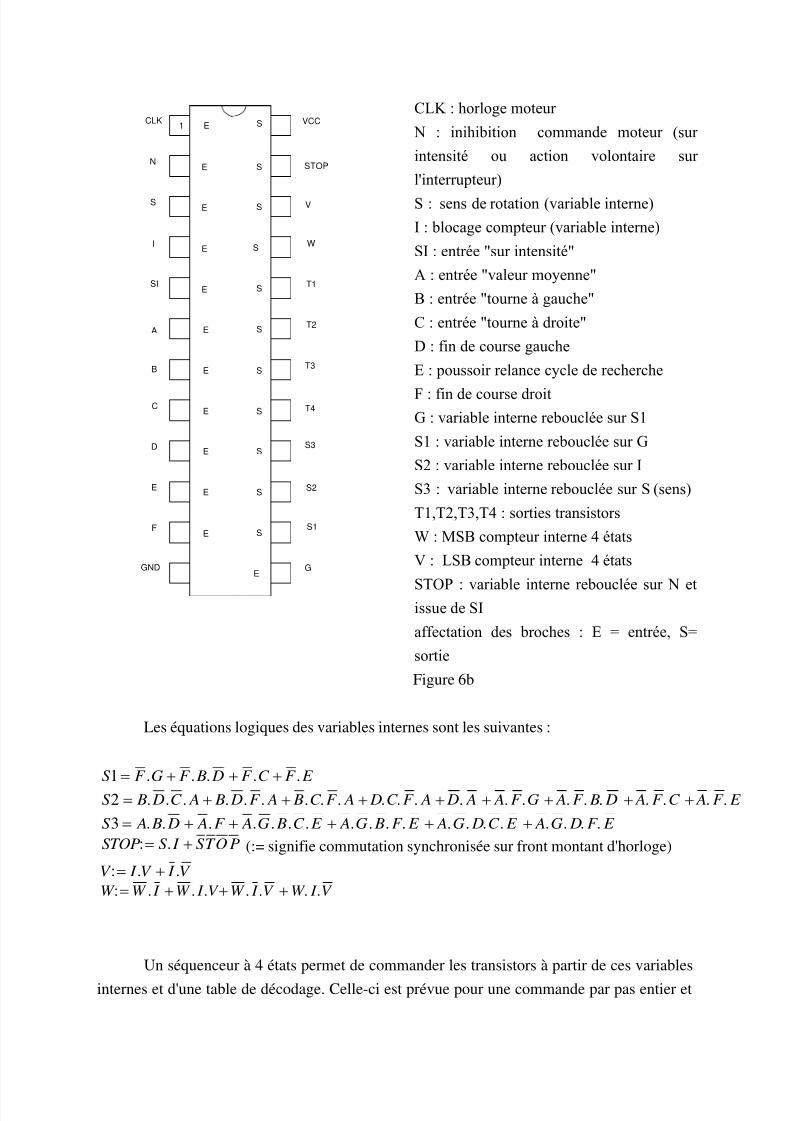
CLK : horloge moteur
N : inihibition commande moteur (sur
intensité ou action volontaire sur
l'interrupteur)
S : sens de rotation (variable interne)
I : blocage compteur (variable interne)
SI : entrée "sur intensité"
A : entrée "valeur moyenne"
B : entrée "tourne à gauche"
C : entrée "tourne à droite"
D : fin de course gauche
E : poussoir relance cycle de recherche
F : fin de course droit
G : variable interne rebouclée sur S1
S1 : variable interne rebouclée sur G
S2 : variable interne rebouclée sur I
S3 : variable interne rebouclée sur S (sens)
T1,T2,T3,T4 : sorties transistors
W : MSB compteur interne 4 états
V : LSB compteur interne 4 états
STOP : variable interne rebouclée sur N etissue de SI
affectation des broches : E = entrée, S=
sortie
Figure 6b
Les équations logiques des variables internes sont les suivantes :
(:= signifie commutation synchronisée sur front montant d'horloge)
Un séquenceur à 4 états permet de commander les transistors à partir de ces variables
internes et d'une table de décodage. Celle-ci est prévue pour une commande par pas entier et
VCC
STOP
V
W
T1
T2
T3
T4
S3
S2
S1
GGND
CLKE
E
E
E
E
N
SI
S
S
S
1
S
S
S
S
S
S
S
E
E
E
E
E
E
E
S
SI
A
B
C
D
E
F
S F G F B D F C F E
1
. . . . .S B D C A B D F A B C F A D C F A D A A F G A F B D A F C A F E 2 . . . . . . . . . . . . . . . . . . . . . .
S A B D A F A G B C E A G B F E A G D C E A G D F E 3 . . . . . . . . . . . . . . . . . . .
STOP S I STO P: .
V I V I V : . .
W W I W I V W I V W I V : . . . . . . .
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 34/68
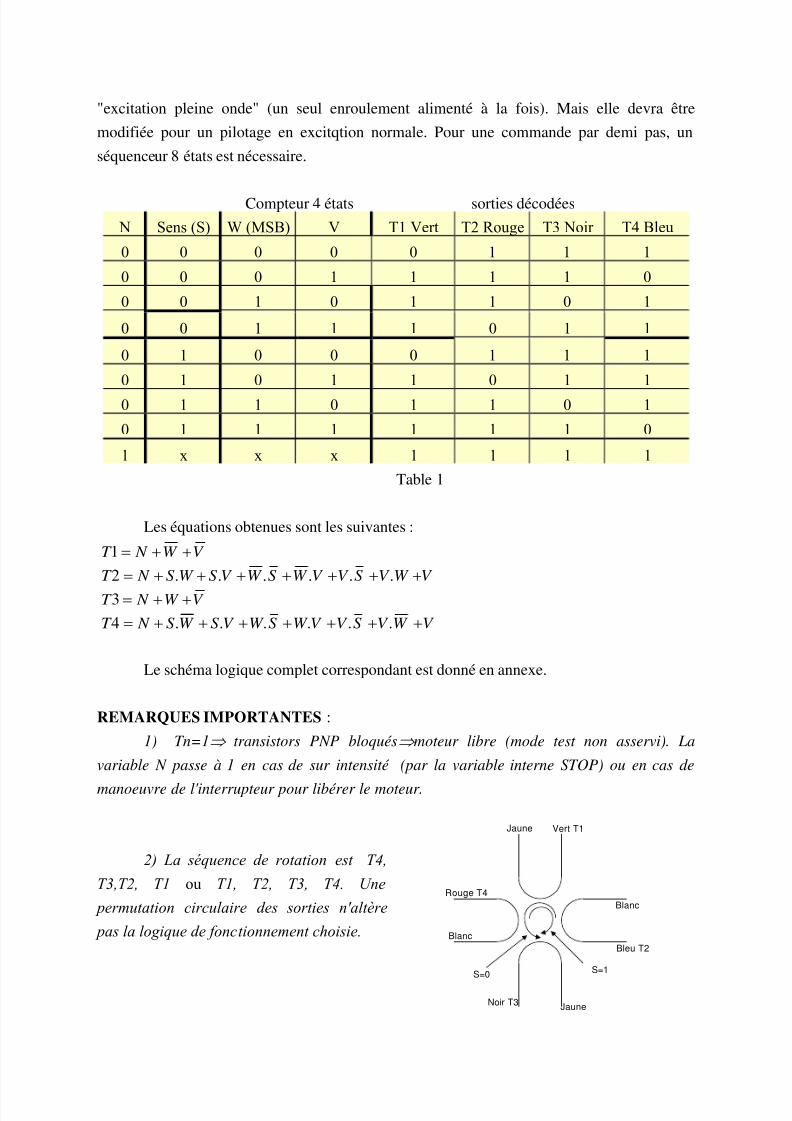
"excitation pleine onde" (un seul enroulement alimenté à la fois). Mais elle devra être
modifiée pour un pilotage en excitqtion normale. Pour une commande par demi pas, un
séquenceur 8 états est nécessaire.
Compteur 4 états sorties décodées
N Sens (S) W (MSB) V T1 Vert T2 Rouge T3 Noir T4 Bleu
0 0 0 0 0 1 1 1
0 0 0 1 1 1 1 0
0 0 1 0 1 1 0 1
0 0 1 1 1 0 1 1
0 1 0 0 0 1 1 1
0 1 0 1 1 0 1 1
0 1 1 0 1 1 0 1
0 1 1 1 1 1 1 0
1 x x x 1 1 1 1
Table 1
Les équations obtenues sont les suivantes :
Le schéma logique complet correspondant est donné en annexe.
REMARQUES IMPORTANTES :
1) Tn=1 transistors PNP bloqués moteur libre (mode test non asservi). La
variable N passe à 1 en cas de sur intensité (par la variable interne STOP) ou en cas de
manoeuvre de l'interrupteur pour libérer le moteur.
2) La séquence de rotation est T4,
T3,T2, T1 ou T1, T2, T3, T4. Une
permutation circulaire des sorties n'altère
pas la logique de fonctionnement choisie.
T N W V 1
T N S W S V W S W V V S V W V 2 . . . . . .
T N W V 3
T N S W S V W S W V V S V W V 4 . . . . . .
Vert T1
Bleu T2
Rouge T4
Noir T3
Blanc
Blanc
Jaune
Jaune
S=1
S=0
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 35/68
3) Pour l'établissement des équations logiques, les variables internes sorties
"physiquement" puis ré-entrées sont complémentées (par convention PAL ) S->/S, V->/V, W-
>/W .
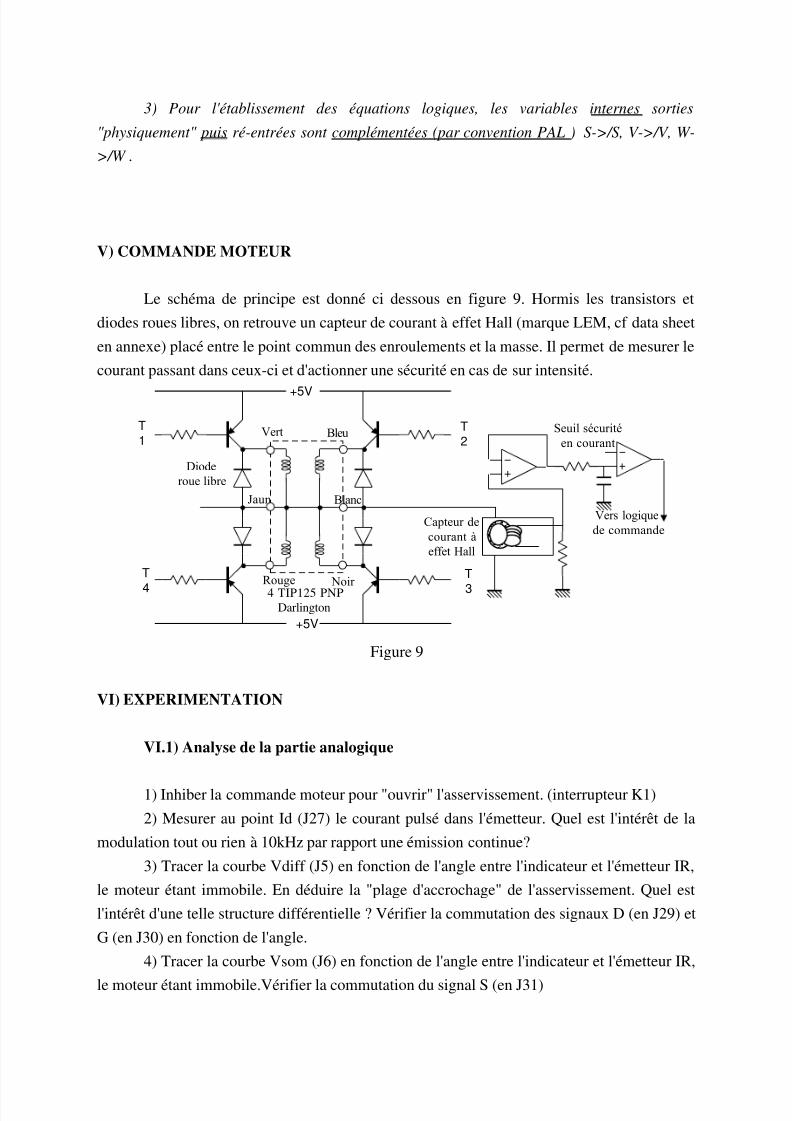
V) COMMANDE MOTEUR
Le schéma de principe est donné ci dessous en figure 9. Hormis les transistors et
diodes roues libres, on retrouve un capteur de courant à effet Hall (marque LEM, cf data sheet
en annexe) placé entre le point commun des enroulements et la masse. Il permet de mesurer le
courant passant dans ceux-ci et d'actionner une sécurité en cas de sur intensité.
Figure 9
VI) EXPERIMENTATION
VI.1) Analyse de la partie analogique
1) Inhiber la commande moteur pour "ouvrir" l'asservissement. (interrupteur K1)
2) Mesurer au point Id (J27) le courant pulsé dans l'émetteur. Quel est l'intérêt de la
modulation tout ou rien à 10kHz par rapport une émission continue?
3) Tracer la courbe Vdiff (J5) en fonction de l'angle entre l'indicateur et l'émetteur IR,
le moteur étant immobile. En déduire la "plage d'accrochage" de l'asservissement. Quel est
l'intérêt d'une telle structure différentielle ? Vérifier la commutation des signaux D (en J29) et
G (en J30) en fonction de l'angle.
4) Tracer la courbe Vsom (J6) en fonction de l'angle entre l'indicateur et l'émetteur IR,
le moteur étant immobile.Vérifier la commutation du signal S (en J31)
Diode
roue libre
Bleu
Jaune
Blanc
Rouge
Vert
Noir
+5V
+5V
T2
T1
T
4
T
34 TIP125 PNP
Darlington
Capteur de
courant à
effet Hall
Vers logique
de commande
Seuil sécurité
en courant
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 36/68
5) Quelle est l'influence de l'appariement imparfait des deux récepteurs ? Comment est
il compensé ?
VI.2) Analyse de la logique commande moteur
1) Analyser sur le schéma logique en annexe le traitement de l'information analogique
issue des récepteurs en phase de recherche de cible puis en fonctionnement asservi.
2) Comment est effectué l'initialisation du système ?
3) Comment le sens de rotation est-il identifié ?
4) Rôle des interrupteurs fin de course et action sur la logique de commande ?
5) Quelle est la précision angulaire maximale de l'asservissement ? Comment pourrait
t on l'améliorer ? (une réponse pour les récepteurs analogiques et une réponse pour le moteur).
Comment évite-t-on une oscillation du moteur autour de sa position d'équilibre ?
VI.3) Analyse de la commande moteur
1) Expliquer le rôle des diodes en parallèle sur les enroulements.
2) Visualiser les tensions sur la base et le collecteur des transistors de
commande(PNP). Vérifier la valeur de Vce "on" et le courant moyen (Imot en J22). 3) Mettre le montage hors tension. Mesurer la résistance Rs d'un enroulement entre le
fil vert et le blanc par exemple.
4) Remettre le montage sous tension. Visualiser à l'aide de la sonde en courant Metrix
AM210, le courant circulant dans un enroulement (fil rouge par exemple). Evaluer la
constante de temps à la coupure et retrouver la valeur de l'inductance Ls de l'enroulement.
Conclure sur la vitesse maximale de rotation.
5) Evaluer les pertes statiques et dynamiques dans les transistors.
VI.4) Re programmation d'un PAL 22V10
1) Ecrire les équations pour réaliser une excitation normale au lieu de pleine onde.
2) Après avoir écrit les nouvelles équations, programmer un nouveau PAL sur le
système ROM 5000.
ATTENTION : Seule les équations de T1, T2, T3, T4 doivent être modifiées et la
variable N maintenue impérativement dans les équations. Respecter l'affectation physique des
broches donnée précédemment. Utiliser un PAL Lattice uniquement.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 37/68
3) Tenter, si le temps le permet, une programmation totale (y compris un séquenceur 8
états) pour une excitation en demi pas.
4) Incidence sur la consommation et sur le système de protection sur intensité.
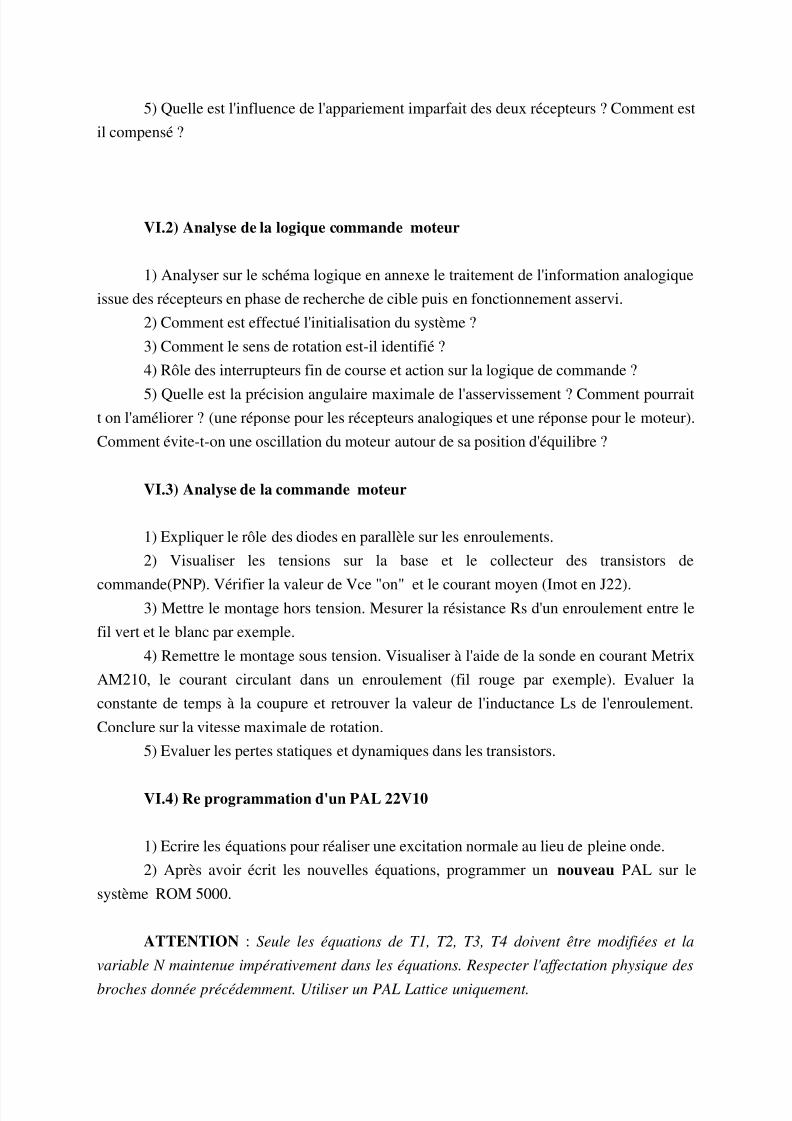
ANNEXES
ANNEXE 1 Schéma général
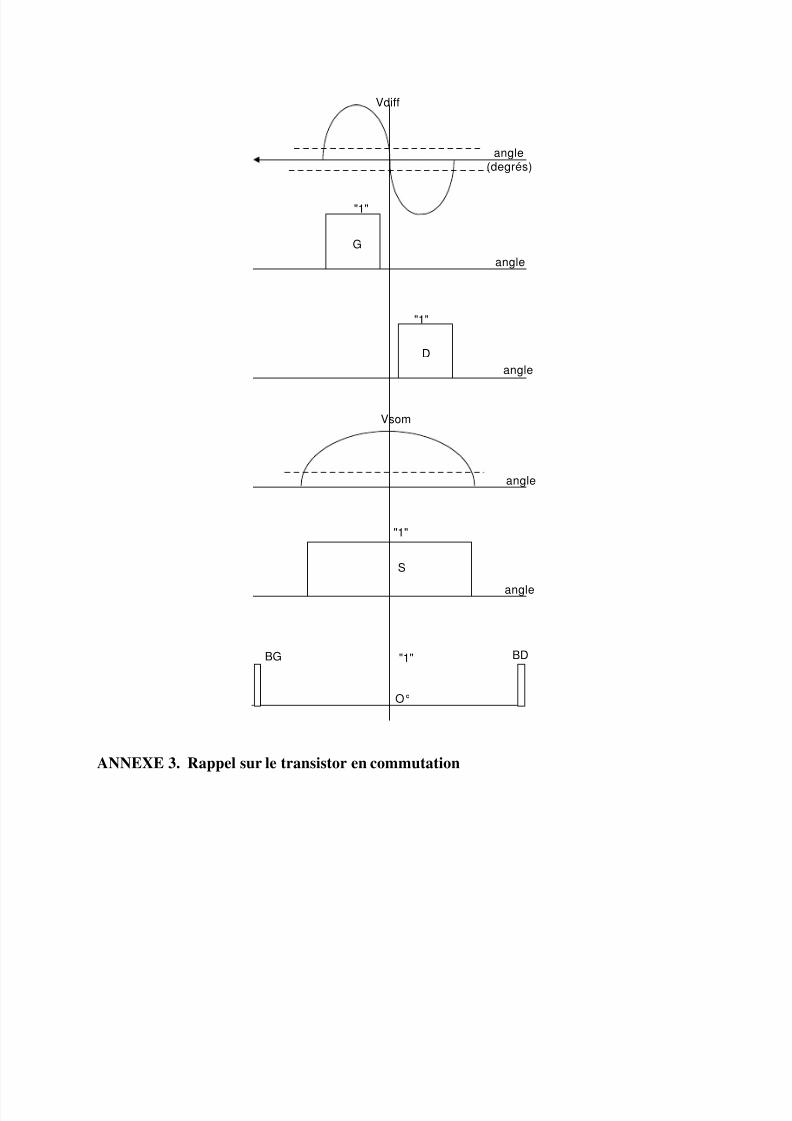
ANNEXE 2. Chronogrammes théoriques
L'angle mentionné est celui formé entre l'axe optique de l'émetteur et l'axe de la flèche.
SCHEMA GENERAL
Vdiff
Vsom
comparateurs
LM311
-Vcc
phototransistor
-Vcc
phototransistor
B
C
A
R
R
R
R
R
R
R P8
P7
P5
P1
P2
P3
Diode
roue libre
Bleu
Jaune Blanc
Rouge Noir
Vert
+5V
+5V
T
2
T
1
T
4T
34 TIP125 PNP
Darlington
Capteur de
courant à
effet Hall
Seuil sécuritéen courant
vers SI
P4
2N2219
VCC
STOP
V (NC)
W (NC)
T1
T2
T3
T4
S3
S2
S1
GGND
CLK E
E
E
E
E
N
SI
S
S
S
1
S
S
S
S
S
S
S
E
E
E
E
E
E
E
S
SI
A
B
C
D
E
F
PAL 22V10
NE555
P6
Vcc
TL072NE555
1k
1k
1k
fin decoursegauche fin de
coursedroit
relance cycle
recherche
"moteur libre"
moteur
74LS14
Vcc
Vcc
Vcc
Vcc
Vcc
Vcc
-Vcc
-Vcc
-Vcc
Ampli op alimentés en +/-5V
Vcc
Vcc
Vcc
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 38/68
ANNEXE 3. Rappel sur le transistor en commutation
Vdiff
angle(degrés)
angle
angle
angle
angle
BDBG
Vsom
G
D
S
O°
"1"
"1"
"1"
"1"
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 39/68
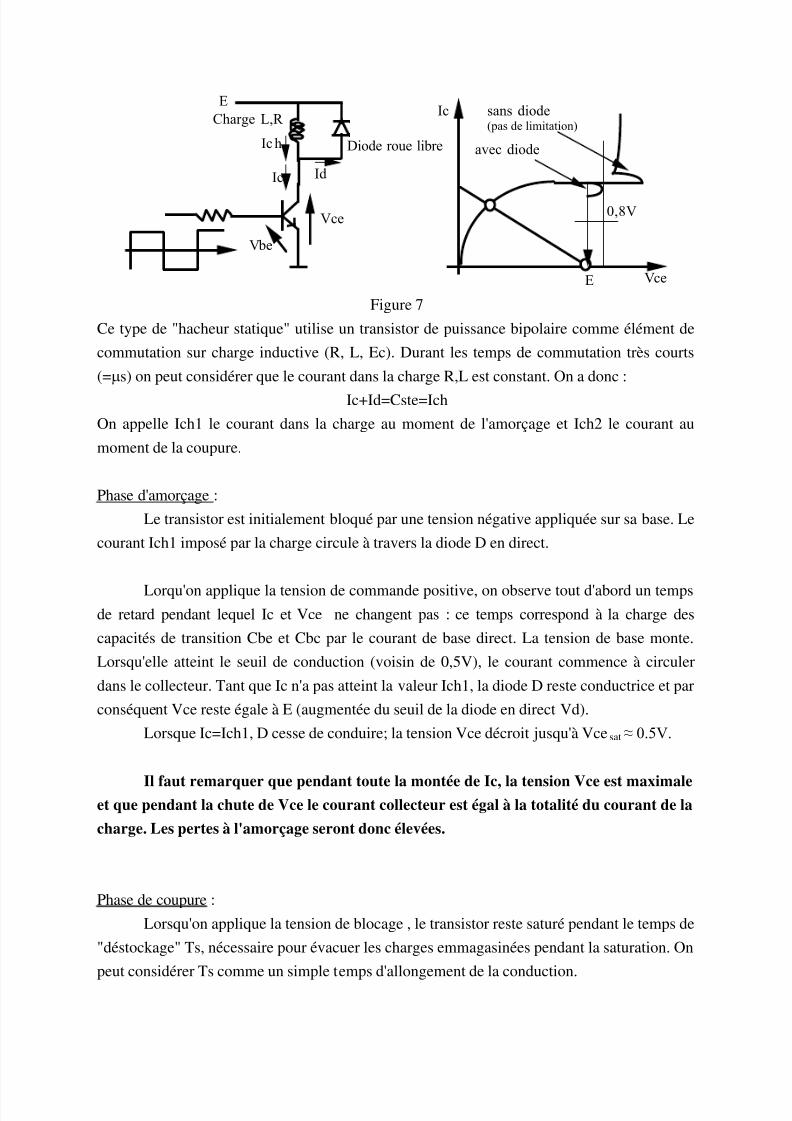
Figure 7
Ce type de "hacheur statique" utilise un transistor de puissance bipolaire comme élément de
commutation sur charge inductive (R, L, Ec). Durant les temps de commutation très courts
(=s) on peut considérer que le courant dans la charge R,L est constant. On a donc :
Ic+Id=Cste=Ich
On appelle Ich1 le courant dans la charge au moment de l'amorçage et Ich2 le courant au
moment de la coupure.
Phase d'amorçage :
Le transistor est initialement bloqué par une tension négative appliquée sur sa base. Le
courant Ich1 imposé par la charge circule à travers la diode D en direct.
Lorqu'on applique la tension de commande positive, on observe tout d'abord un temps
de retard pendant lequel Ic et Vce ne changent pas : ce temps correspond à la charge des
capacités de transition Cbe et Cbc par le courant de base direct. La tension de base monte.
Lorsqu'elle atteint le seuil de conduction (voisin de 0,5V), le courant commence à circuler
dans le collecteur. Tant que Ic n'a pas atteint la valeur Ich1, la diode D reste conductrice et par
conséquent Vce reste égale à E (augmentée du seuil de la diode en direct Vd).
Lorsque Ic=Ich1, D cesse de conduire; la tension Vce décroit jusqu'à Vcesat ≈ 0.5V.
Il faut remarquer que pendant toute la montée de Ic, la tension Vce est maximaleet que pendant la chute de Vce le courant collecteur est égal à la totalité du courant de la
charge. Les pertes à l'amorçage seront donc élevées.
Phase de coupure :
Lorsqu'on applique la tension de blocage , le transistor reste saturé pendant le temps de
"déstockage" Ts, nécessaire pour évacuer les charges emmagasinées pendant la saturation. On
peut considérer Ts comme un simple temps d'allongement de la conduction.
Diode roue libre
Charge L,R
Vce
E
Vbe
E
Ic
Vce
0,8V
avec diode
sans diode(pas de limitation)
Ic Id
Ic h
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 40/68
Lorsque les charges stockées ont été évacuées par le courant inverse de base, une
partie du courant Ich2 va charger la capacité de transition Cbc : Vce monte de Vce sat à E;
durant cette montée, le courant "externe" du collecteur reste égal au courant de charge puisque
D ne peut pas conduire : elle reste bloquée tant que Vce n'a pas atteint E. Lorsque Vce atteint
cette valeur, la diode entre en conduction et le courant de collecteur peut alors décroître.
Là encore les pertes seront importantes, la montée de Vce se faisant à courant
collecteur maximal (Ic=Ich2) et la coupure de courant se faisant à tension maximale
(E+Vd).
Influence du courant de recouvrement inverse de D à l'amorçage :
A l'amorçage, le circuit dans lequel se trouve la diode voit sa tension s'inverser de Vd
à -E
brusquement. Pendant ce court instant dit de "recouvrement", le courant traversant la diode
s'inverse de façon à évacuer les charges stockées en direct et provoque une surintensité
ponctuelle dans le transistor. On utilisera donc de préférence des diodes à recouvrement
rapide.
Puissance moyenne dissipée dans le transistor :
L'énergie perdue sur une période T se décompose de la façon suivante:Pertes Statiques :
a) Ws : énergie perdue pendant la saturation Tsat
Ws = Vcesat . Icmoyen . Tsat
b) Wb : énergie perdue pendant le blocage Tb (avec Tsat+Tb=T)
Wb = E.Icex.Tb où Icex = courant de fuite du transistor bloqué (
Pour un rapport cyclique donné, ces pertes sont constantes.
Pertes dynamiques :
Wt : énergie perdue pendant les commutations (amorçage et coupure)
Pour un rapport cyclique donné, ces pertes augmentent avec la fréquence car les temps
de commutations sont, eux, constants.
La puissance totale moyenne dissipée par le transistor lorsqu'il fonctionne à une
fréquence f=1/T s'exprime alors par la somme des différentes contributions :
Pmoy= P(S+B)+Wt.1/T
Le premier terme ne dépend que du rapport cyclique de la commande et le deuxième
augmente proportionnellement à la fréquence de découpage. La puissance moyenne doit bien
évidemment rester inférieure à la puissance continue maximale que peut dissiper le transistor.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 41/68
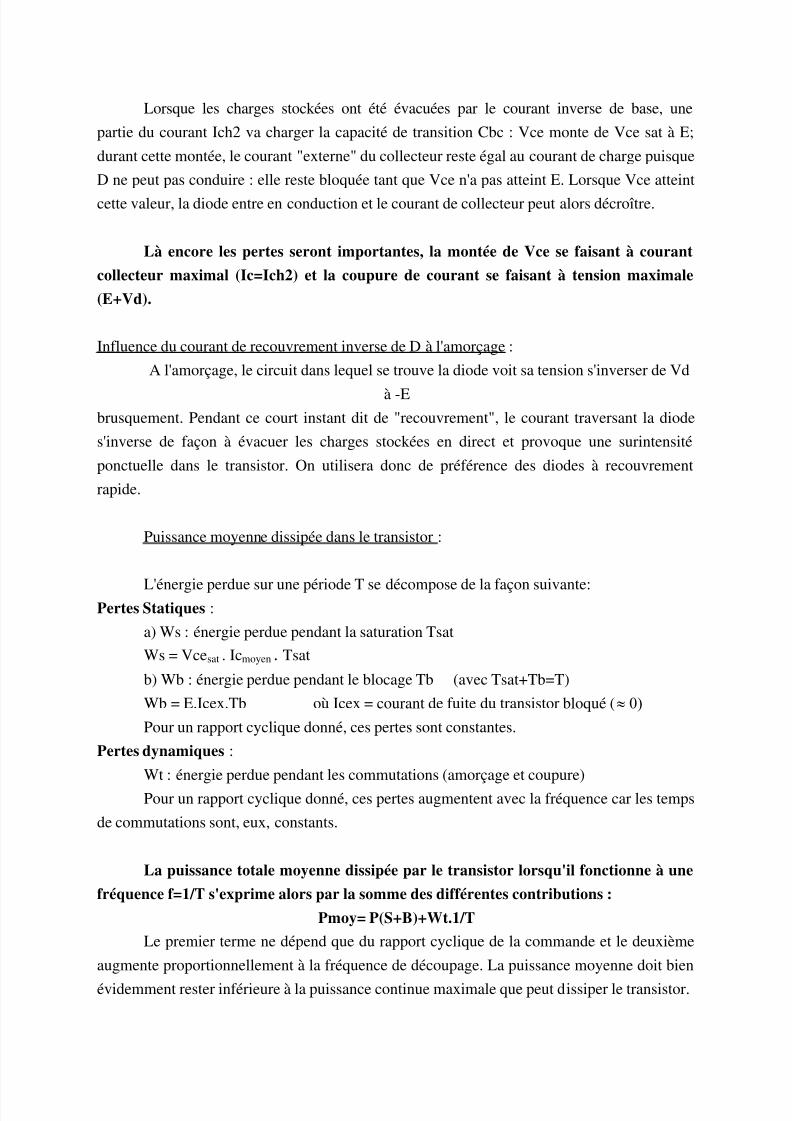
Chronogramme d'amorçage et de coupure du transistor sur charge inductive
ANNEXE 4. extrait Data sheet Module LEM http://lem.com
Capteurs de Courant à Boucle Fermée (B/F) LA-25 NP Principe de fonctionnement
Particularités :
Large gamme de fréquence >100kHz Bonne précision globale Temps de réponse court Faible dérive en température Excellente linéarité Pas de pertes d’insertion
Ic
Id
Vce
E+Vd
Ich1
Ich2
IRR
Ich1
Amorçage Coupure
Vce sat
Charge L,R
Vce
E
Vbe
Ic
IRR Ic h

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 42/68
Le flux magnétique créé par le courant primaire IP est compensé à l’aide d’une bobine secondaire, par l’intermédiaire d’une cellule à effet Hall associée à un circuit électronique. Le courant secondaire de
compensation est l’exacte représentation du courant primaire.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 43/68
III/ EXPLEContrôle d'un moteur pas à pas bipolaire via une ligne rs232
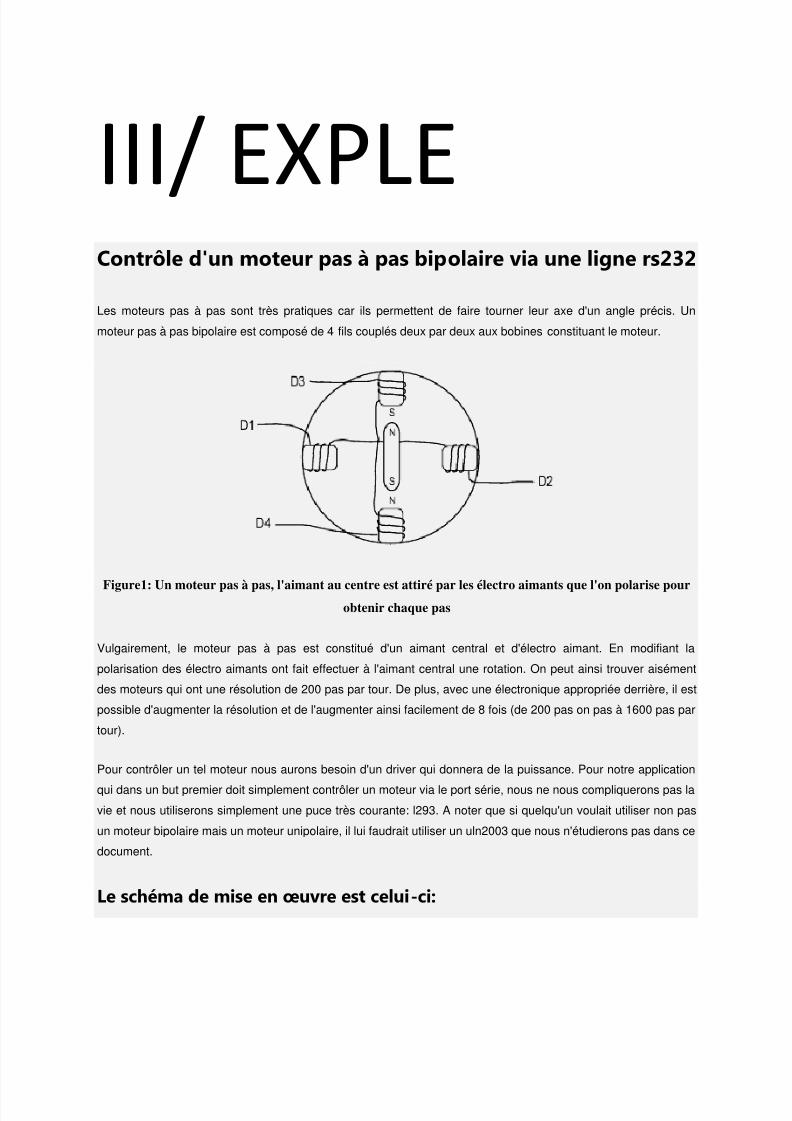
Les moteurs pas à pas sont très pratiques car ils permettent de faire tourner leur axe d'un angle précis. Un
moteur pas à pas bipolaire est composé de 4 fils couplés deux par deux aux bobines constituant le moteur.
Figure1: Un moteur pas à pas, l'aimant au centre est attiré par les électro aimants que l'on polarise pourobtenir chaque pas
Vulgairement, le moteur pas à pas est constitué d'un aimant central et d'électro aimant. En modifiant la
polarisation des électro aimants ont fait effectuer à l'aimant central une rotation. On peut ainsi trouver aisément
des moteurs qui ont une résolution de 200 pas par tour. De plus, avec une électronique appropriée derrière, il est
possible d'augmenter la résolution et de l'augmenter ainsi facilement de 8 fois (de 200 pas on pas à 1600 pas par
tour).
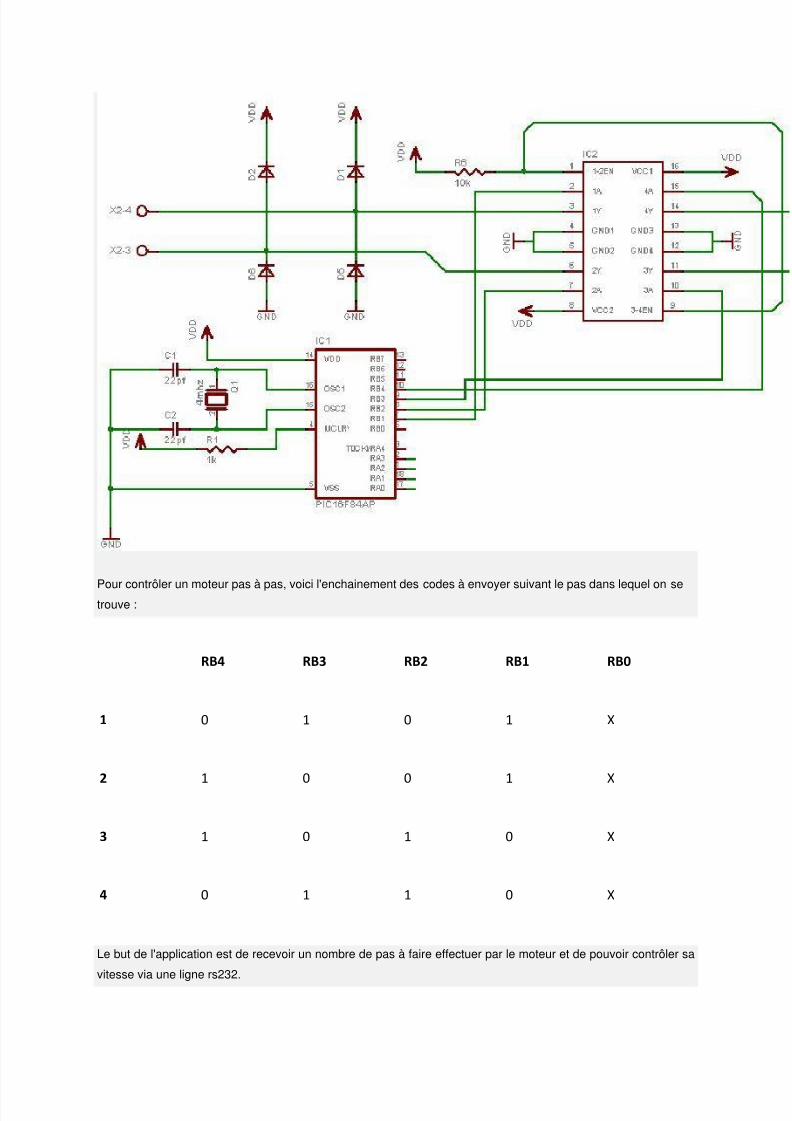
Pour contrôler un tel moteur nous aurons besoin d'un driver qui donnera de la puissance. Pour notre application
qui dans un but premier doit simplement contrôler un moteur via le port série, nous ne nous compliquerons pas la
vie et nous utiliserons simplement une puce très courante: l293. A noter que si quelqu'un voulait utiliser non pas
un moteur bipolaire mais un moteur unipolaire, il lui faudrait utiliser un uln2003 que nous n'étudierons pas dans ce
document.
Le schéma de mise en œuvre est celui-ci:
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 44/68
Pour contrôler un moteur pas à pas, voici l'enchainement des codes à envoyer suivant le pas dans lequel on setrouve :
RB4 RB3 RB2 RB1 RB0
1 0 1 0 1 X
2
1 0 0 1 X
3 1 0 1 0 X
4 0 1 1 0 X
Le but de l'application est de recevoir un nombre de pas à faire effectuer par le moteur et de pouvoir contrôler sa
vitesse via une ligne rs232.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 45/68
La première étape est d'initialiser le pic et le moteur, vu que l'on ne connait pas à quel pas se trouve le moteur,
nous lui faisons effectuer quelque pas dans le vide, pour être sur qu'il passe au moins une fois par le code sur
lequel il s'est arrêter.
Dans ce programme dont vous pourrez trouver les sources dans les téléchargements, l'octet envoyé par
l'ordinateur est séparé en deux parties, le bit de poids faible donne la direction du mouvement et les 7 autres bits
donnent un nombre pair de pas à effectuer. Quand les pas sont effectués, l'ordinateur reçoit une confirmation par
la réception d'un 1.
Pour effectuer le bon pas, il faut absolument connaitre la position dans laquelle le moteur est. Comme vous
pouvez le remarquez sur le tableau ci-dessus, il existe 4 codes qui doivent s’enchainer dans un sens ou dans
l’autre pour que le moteur tourne. La solution que nous avons choisie est très simple à comprendre et est
exposée dans le code source du programme.
Je préfère prévenir qu’il existe d’autres méthodes, plus simple pour arriver au même résultat, mais j’espère que
vous m’en voudrez pas de m’être amuser à passer par une technique plus longue.
La première partie est de savoir dans quel pas on se trouve, pour ça nous conserverons la dernière position dans
une variable. Ensuite il suffit de regarder la valeur décimale de chaque code.
Vu que RB1 vaut 2, RB2 vaut 4, RB3 vaut 8 et RB4 vaut 16, on peut donc calculer quel valeur décimal à chaque
pas, il suffit alors d’ajouter ou de retirer au PORTB la valeur nécessaire pour passer au pas suivant ou précédent
suivant la direction demandée.
Pour contrôler la vitesse nous passerons par un sous menu accessible depuis l'envoie du code 255 soit h'ff'.Lorsque l'on rentre dans ce sous menu, l'ordinateur reçoit une confirmation par la réception d'un '4' qui indique à
l'ordinateur qu'il peut envoyer un nouvelle octet précisant la vitesse. La vitesse n'est rien d'autre que le temps de
pause entre chaque pas. Dans un moteur pas à pas, la puissance du moteur dépend fortement de la vitesse à
laquelle il tourne. Une fois la vitesse envoyée, (1=1µs jusqu'à 255= 255µs), le pic renvoie un 5 en confirmation.
Pour tester l'application, vous pouvez utiliser ce programme qui permet d'envoyer ce que l'on veut sur le port
série :
http://www.docklight.de/
Telecharger le code source
Pour ceux qui souhaiterait aller plus loin avec les moteurs pas à pas, je vous conseille ces articles-ci parru plus
récemment sur roboticus.org
Le moteur pas à pas bipolaire
Drive pour moteur pas à pas avec microstepping via la puce A3979

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 46/68
Un drive de moteur pas à pas avec la puce A3979
Dimanche, 24 Octobre 2010 15:58 Benjamin
Note des utilisateurs: / 12
Mauvais Très bienNote vote com_content 46
http://w w w .robo
Un drive performant pour moteur pas à pas
Nous avons vu précédemment que pour contrôler un moteur pas à pas il est nécessaire de changer la polarité
des bobines pour chaque pas. De plus si on souhaite contrôler en divisant les pas (microstepping) il est
nécessaire de contrôler le courant circulant. Ce qui devient une tâche bien difficile. Heureusement il existe des
puces qui rendent ce travail complètement transparent, il restera uniquement à placer derrière un microcontroleur
qui envoie des impulsions à la vitesse de rotation souhaitée.
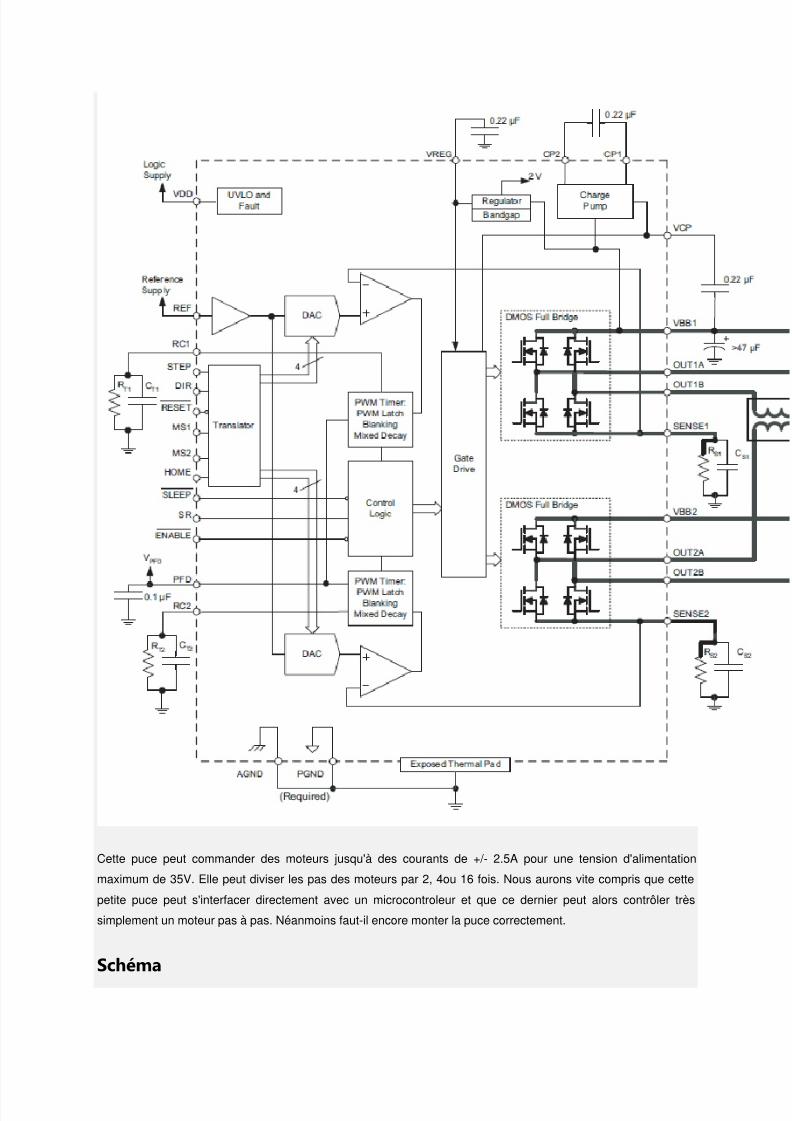
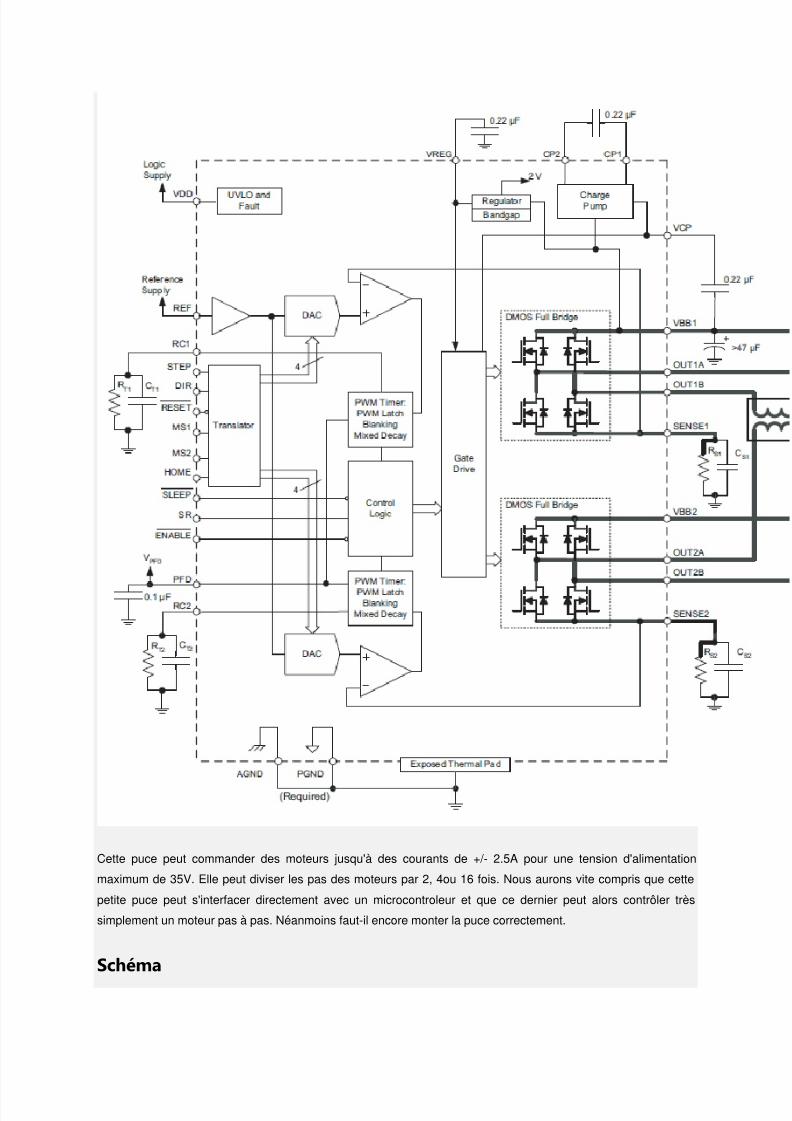
La puce A3979 d'AllegroMicro est un composant intégré dans lequel on trouve deux ponts en H pour controler un
moteur pas à pas (étage de puissance).Mais également toutes les fonctions permettant de traduire les
impulsions, de calculer les courants qui circulent dans le moteur et réguler ce dernier, ... .Un composant comme
ce dernier intègre toutes les fonctions nécessaires pour faire tourner un moteur pas à pas. Il ne reste qu'à placer
derrière un signal envoyant des impulsions pour commander les pas et un autre indiquant le sens de rotation pour
faire tourner le moteur.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 47/68
Cette puce peut commander des moteurs jusqu'à des courants de +/- 2.5A pour une tension d'alimentation
maximum de 35V. Elle peut diviser les pas des moteurs par 2, 4ou 16 fois. Nous aurons vite compris que cette
petite puce peut s'interfacer directement avec un microcontroleur et que ce dernier peut alors contrôler très
simplement un moteur pas à pas. Néanmoins faut-il encore monter la puce correctement.
Schéma
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 48/68
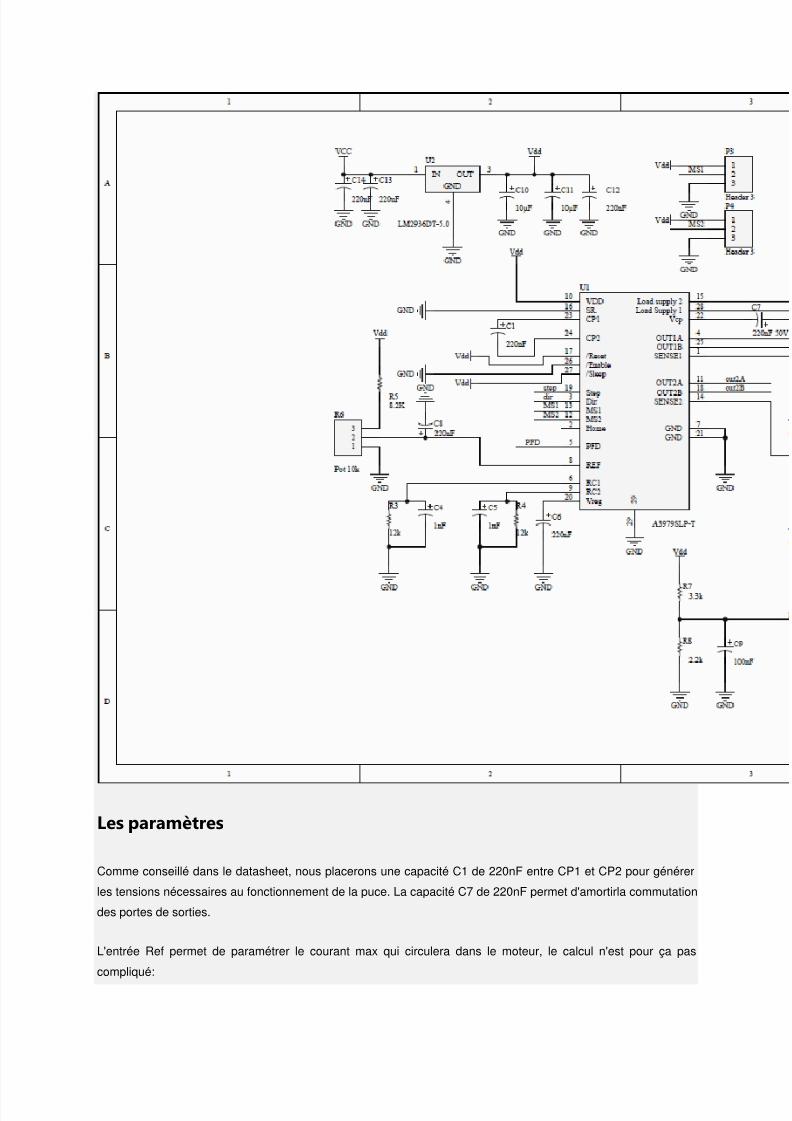
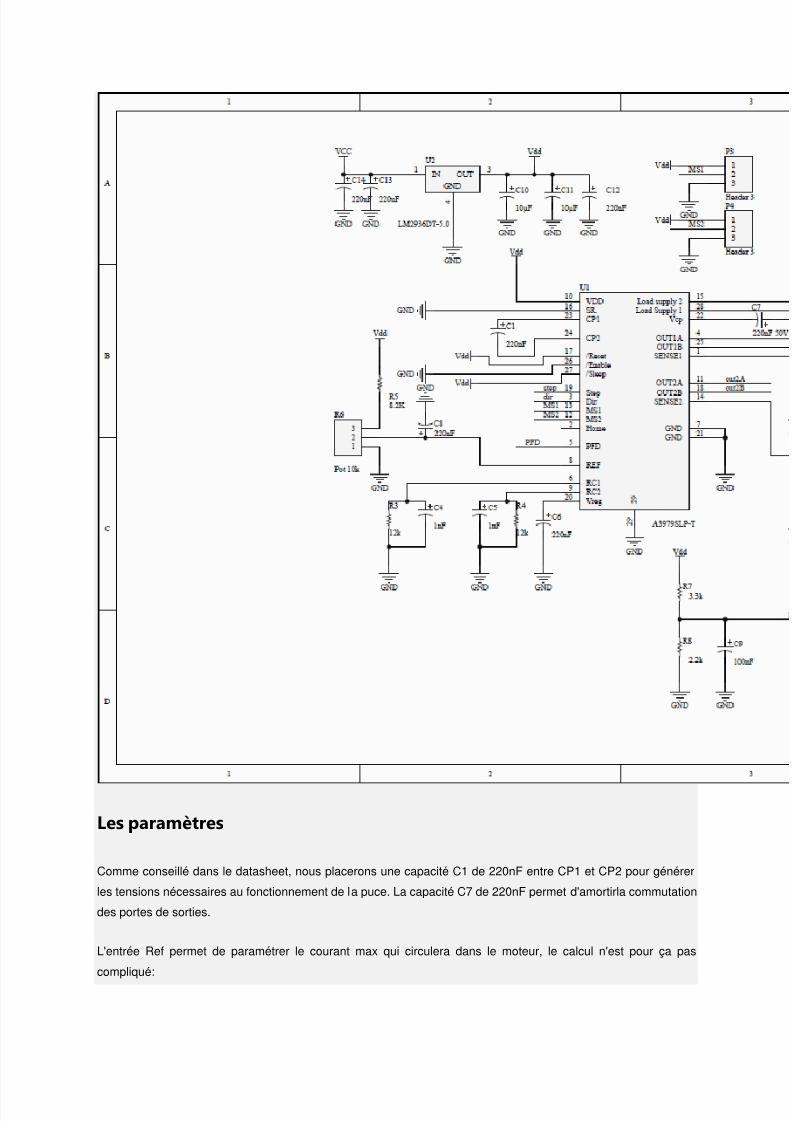
Les paramètres
Comme conseillé dans le datasheet, nous placerons une capacité C1 de 220nF entre CP1 et CP2 pour générer
les tensions nécessaires au fonctionnement de la puce. La capacité C7 de 220nF permet d'amortirla commutation
des portes de sorties.
L'entrée Ref permet de paramétrer le courant max qui circulera dans le moteur, le calcul n'est pour ça pas
compliqué:

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 49/68
Dans notre cas, RS vaut 0.15Ohm. De manière à éviter d'envoyer par erreur un courant trop important, nous
avons bridé la tension maximale qui peut être présente au point milieu du potentiometre R6 (10k) au travers de larésistance R5 (8.2k). De cette manière, Vref ne peut excéder 2.75V. Soit Itrip ne peut être plus important que
2.3A qui est inférieur à 2.5A. La capacité C8 (220nF) permet de filtrer la tension continue présente sur Vref.
Les paramètres RC1/RC2 gèrent la constante de temps. Plus elle est faible, plus la régulation du courant sera
précise mais au détriment des pertes dans la commutation des mosfets. Dans notre cas, nous avons placé 1nF
pour C4 et C5 et 12Kohms pour R3 et R4.
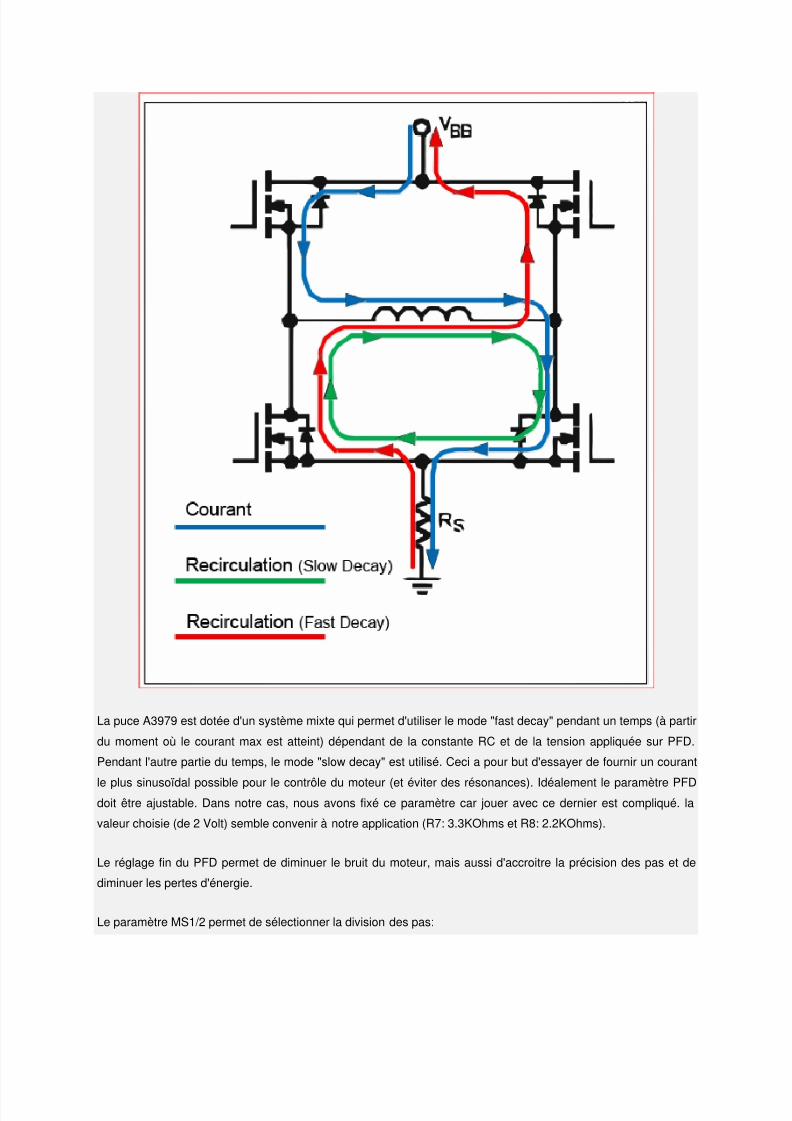
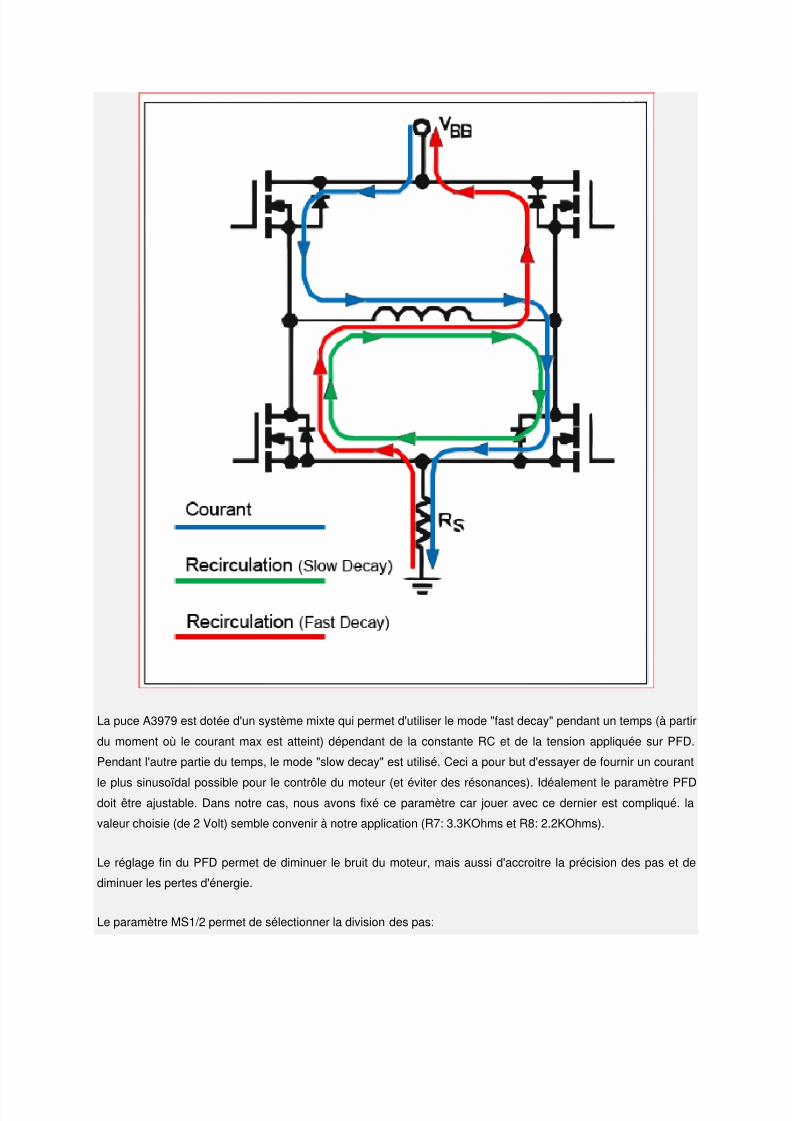
Le paramètre PFD est certainement le point le plus compliqué de ce montage. Nous allons tenter de l'expliquer
simplement. Lors de la commutation des mofsets du H Bridge qui permettent de controler le moteur, l'énergie
accumulée dans la bobine par le courant (représenté en bleu dans la figure ci-dessus) doit se vider. Ceci peut se
faire de deux manières: soit au travers des diodes schottky (en rouge), manière qui représente le mode Fast
Decay (décroissance rapide du courant) soit par le chemin représenté en vert, qui est le mode slow decay en
décalant la fermeture d'un des mosfets. Quel est le meilleur mode? On choisit le mode que l'on souhaite en
fonction de l'application, si le moteur doit tourner lentement (slow decay), ou rapidement (Fast Decay).
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 50/68
La puce A3979 est dotée d'un système mixte qui permet d'utiliser le mode "fast decay" pendant un temps (à partir
du moment où le courant max est atteint) dépendant de la constante RC et de la tension appliquée sur PFD.
Pendant l'autre partie du temps, le mode "slow decay" est utilisé. Ceci a pour but d'essayer de fournir un courant
le plus sinusoïdal possible pour le contrôle du moteur (et éviter des résonances). Idéalement le paramètre PFD
doit être ajustable. Dans notre cas, nous avons fixé ce paramètre car jouer avec ce dernier est compliqué. la
valeur choisie (de 2 Volt) semble convenir à notre application (R7: 3.3KOhms et R8: 2.2KOhms).
Le réglage fin du PFD permet de diminuer le bruit du moteur, mais aussi d'accroitre la précision des pas et de
diminuer les pertes d'énergie.
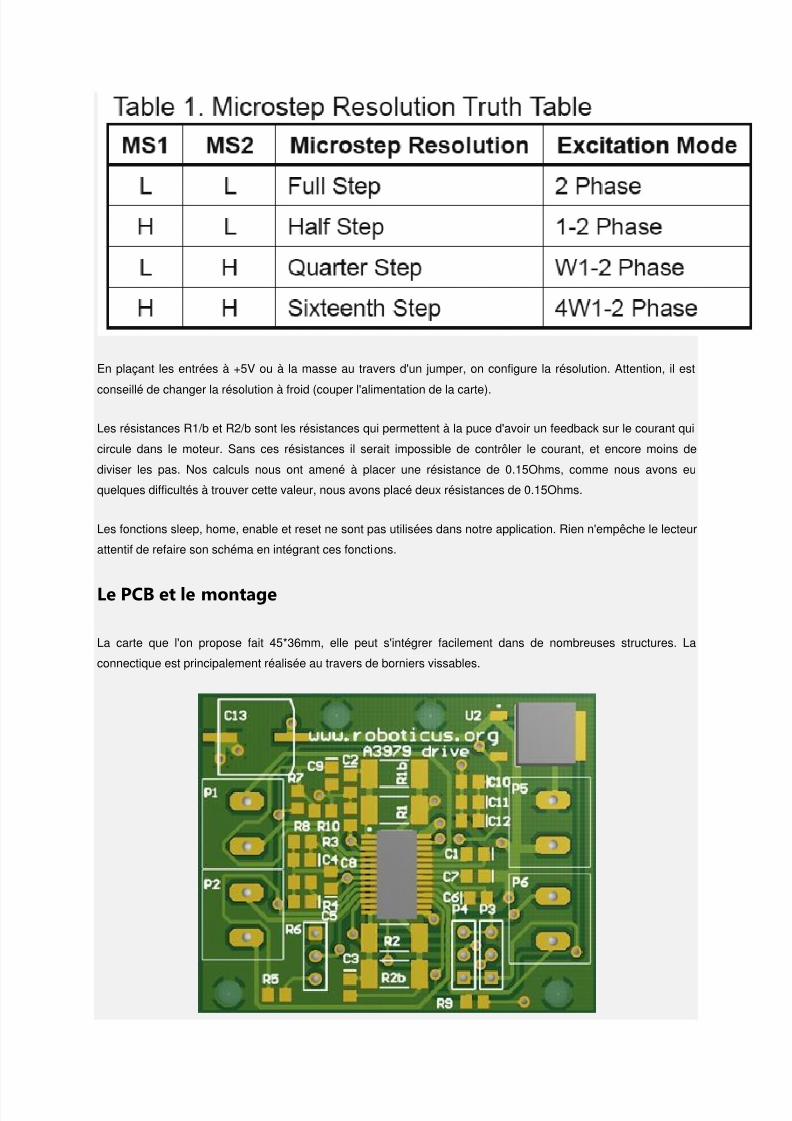
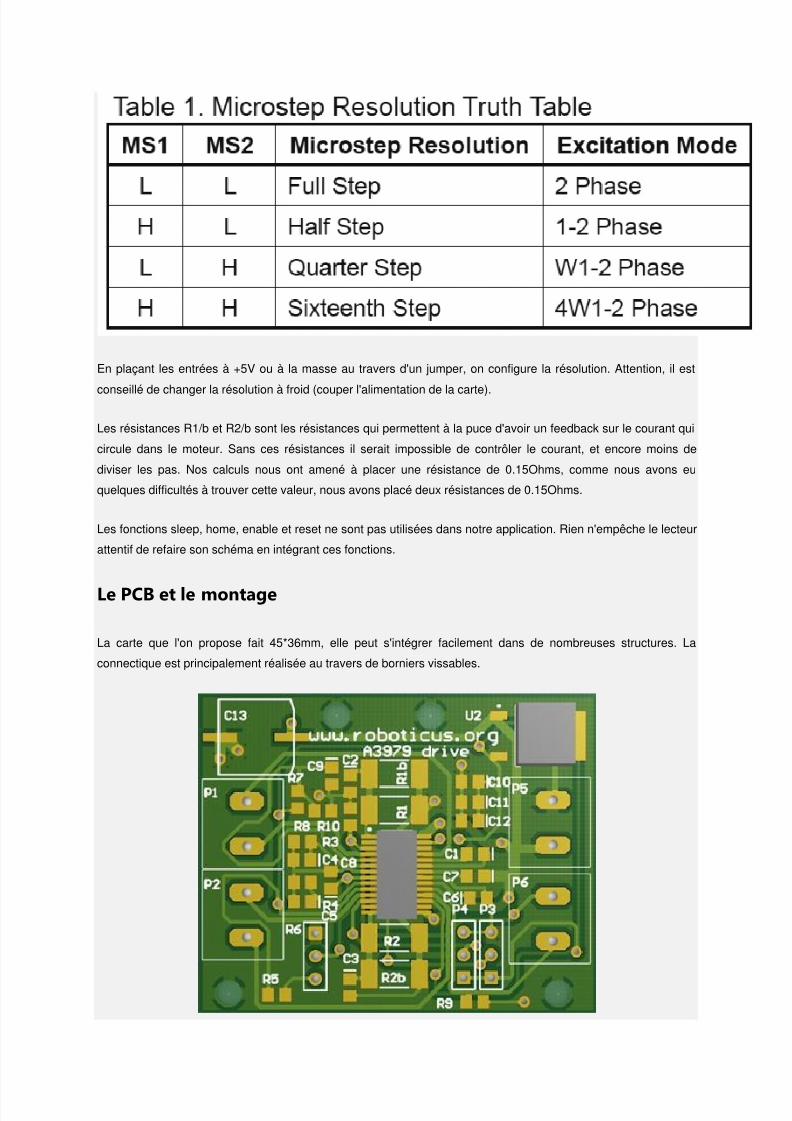
Le paramètre MS1/2 permet de sélectionner la division des pas:
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 51/68
En plaçant les entrées à +5V ou à la masse au travers d'un jumper, on configure la résolution. Attention, il est
conseillé de changer la résolution à froid (couper l'alimentation de la carte).
Les résistances R1/b et R2/b sont les résistances qui permettent à la puce d'avoir un feedback sur le courant qui
circule dans le moteur. Sans ces résistances il serait impossible de contrôler le courant, et encore moins de
diviser les pas. Nos calculs nous ont amené à placer une résistance de 0.15Ohms, comme nous avons eu
quelques difficultés à trouver cette valeur, nous avons placé deux résistances de 0.15Ohms.
Les fonctions sleep, home, enable et reset ne sont pas utilisées dans notre application. Rien n'empêche le lecteur
attentif de refaire son schéma en intégrant ces fonctions.
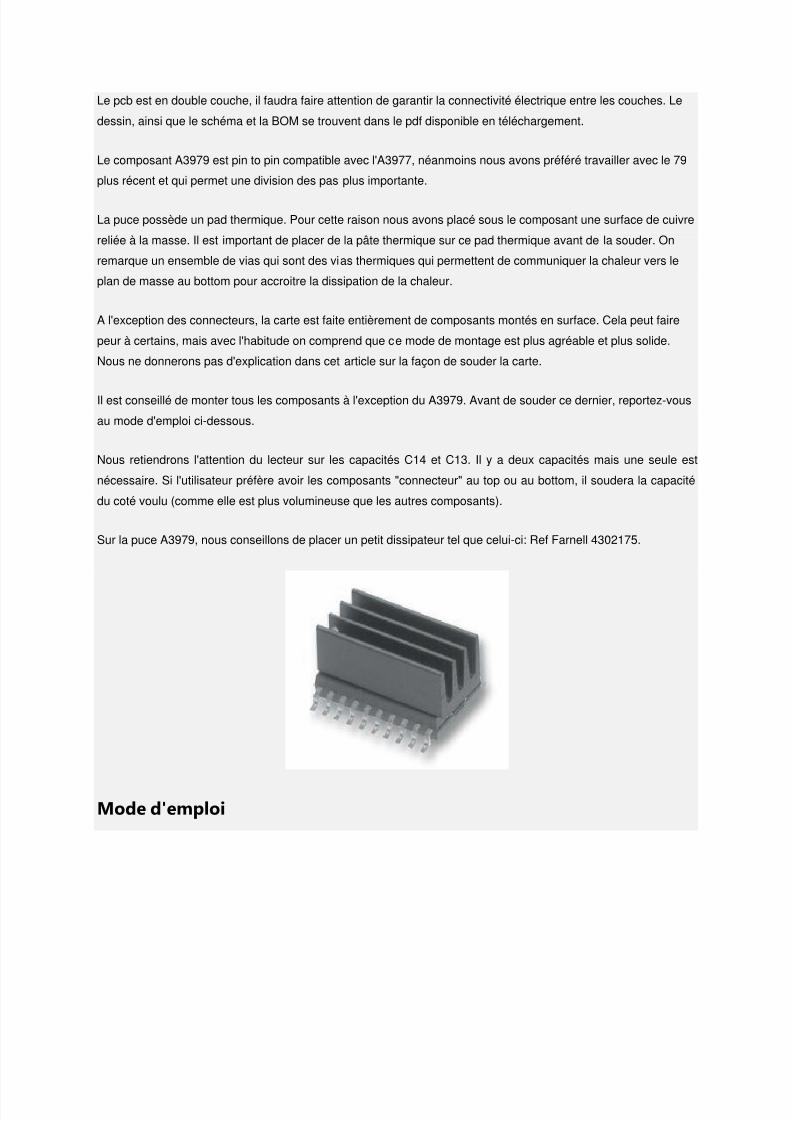
Le PCB et le montage
La carte que l'on propose fait 45*36mm, elle peut s'intégrer facilement dans de nombreuses structures. La
connectique est principalement réalisée au travers de borniers vissables.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 52/68
Le pcb est en double couche, il faudra faire attention de garantir la connectivité électrique entre les couches. Le
dessin, ainsi que le schéma et la BOM se trouvent dans le pdf disponible en téléchargement.
Le composant A3979 est pin to pin compatible avec l'A3977, néanmoins nous avons préféré travailler avec le 79
plus récent et qui permet une division des pas plus importante.
La puce possède un pad thermique. Pour cette raison nous avons placé sous le composant une surface de cuivre
reliée à la masse. Il est important de placer de la pâte thermique sur ce pad thermique avant de la souder. On
remarque un ensemble de vias qui sont des vias thermiques qui permettent de communiquer la chaleur vers le
plan de masse au bottom pour accroitre la dissipation de la chaleur.
A l'exception des connecteurs, la carte est faite entièrement de composants montés en surface. Cela peut faire
peur à certains, mais avec l'habitude on comprend que ce mode de montage est plus agréable et plus solide.
Nous ne donnerons pas d'explication dans cet article sur la façon de souder la carte.
Il est conseillé de monter tous les composants à l'exception du A3979. Avant de souder ce dernier, reportez-vous
au mode d'emploi ci-dessous.
Nous retiendrons l'attention du lecteur sur les capacités C14 et C13. Il y a deux capacités mais une seule est
nécessaire. Si l'utilisateur préfère avoir les composants "connecteur" au top ou au bottom, il soudera la capacité
du coté voulu (comme elle est plus volumineuse que les autres composants).
Sur la puce A3979, nous conseillons de placer un petit dissipateur tel que celui-ci: Ref Farnell 4302175.
Mode d'emploi
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 53/68
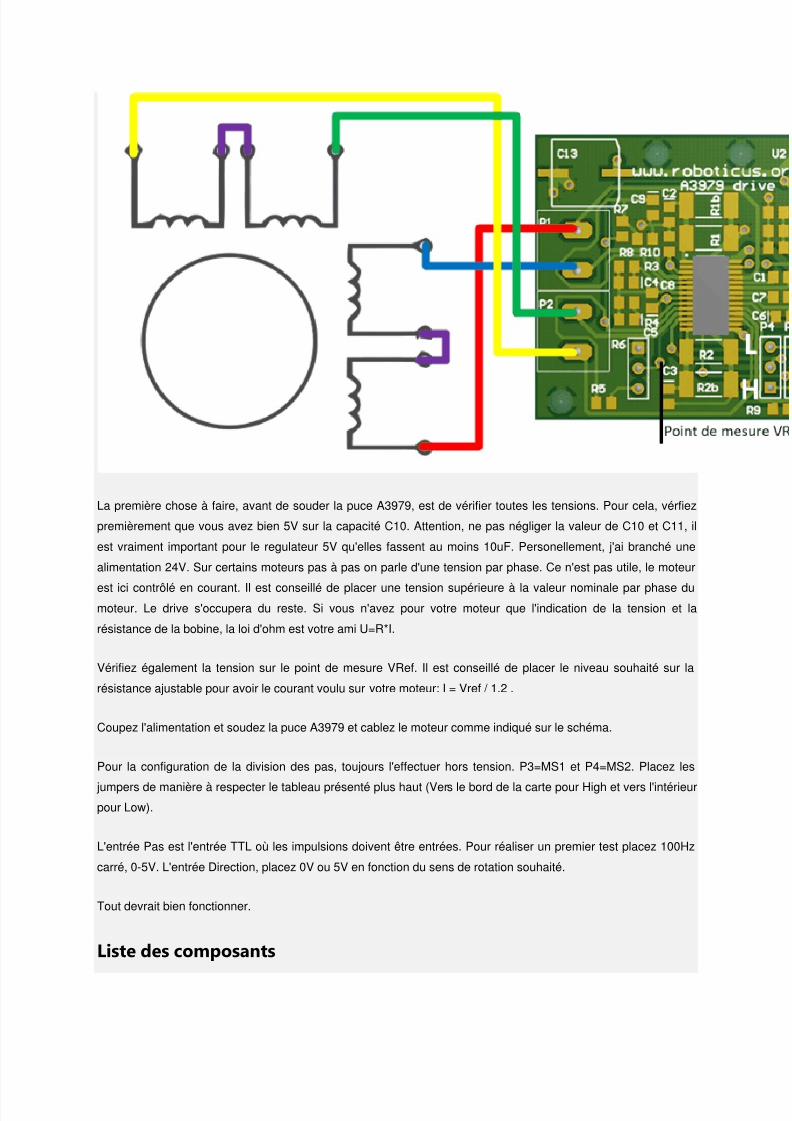
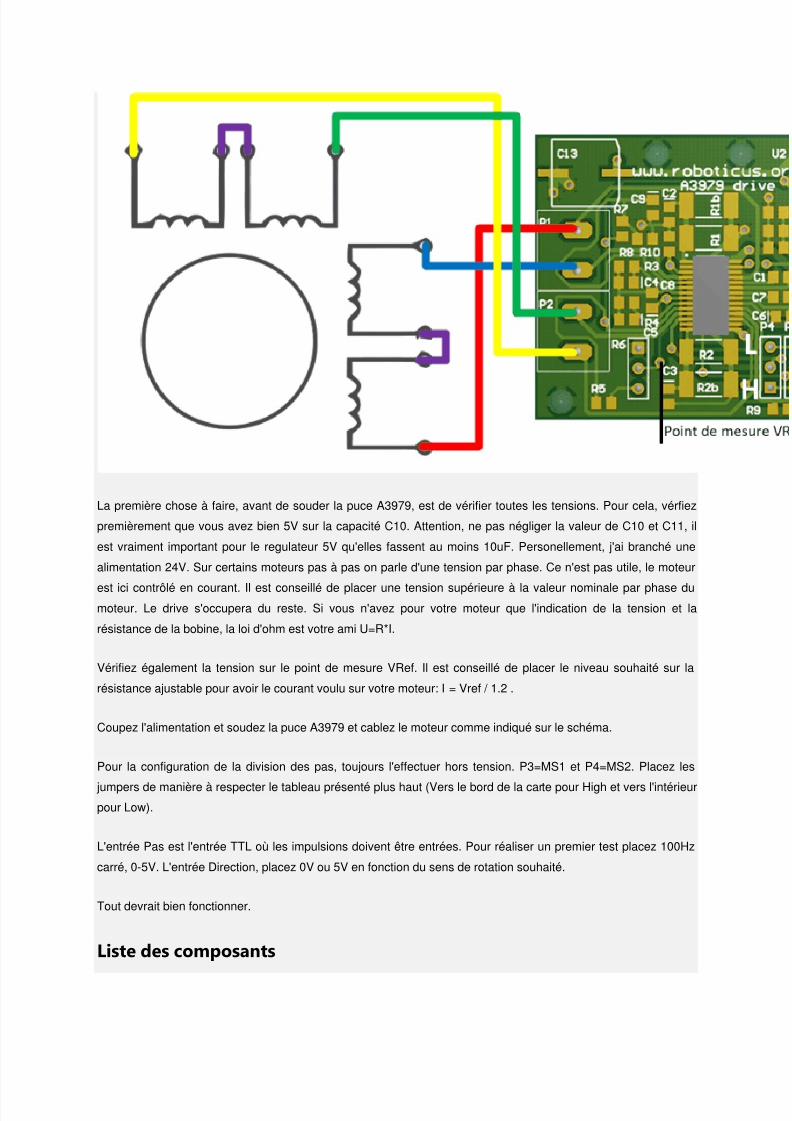
La première chose à faire, avant de souder la puce A3979, est de vérifier toutes les tensions. Pour cela, vérfiez
premièrement que vous avez bien 5V sur la capacité C10. Attention, ne pas négliger la valeur de C10 et C11, il
est vraiment important pour le regulateur 5V qu'elles fassent au moins 10uF. Personellement, j'ai branché une
alimentation 24V. Sur certains moteurs pas à pas on parle d'une tension par phase. Ce n'est pas utile, le moteur
est ici contrôlé en courant. Il est conseillé de placer une tension supérieure à la valeur nominale par phase du
moteur. Le drive s'occupera du reste. Si vous n'avez pour votre moteur que l'indication de la tension et la
résistance de la bobine, la loi d'ohm est votre ami U=R*I.
Vérifiez également la tension sur le point de mesure VRef. Il est conseillé de placer le niveau souhaité sur la
résistance ajustable pour avoir le courant voulu sur votre moteur: I = Vref / 1.2 .
Coupez l'alimentation et soudez la puce A3979 et cablez le moteur comme indiqué sur le schéma.
Pour la configuration de la division des pas, toujours l'effectuer hors tension. P3=MS1 et P4=MS2. Placez les
jumpers de manière à respecter le tableau présenté plus haut (Vers le bord de la carte pour High et vers l'intérieur
pour Low).
L'entrée Pas est l'entrée TTL où les impulsions doivent être entrées. Pour réaliser un premier test placez 100Hz
carré, 0-5V. L'entrée Direction, placez 0V ou 5V en fonction du sens de rotation souhaité.
Tout devrait bien fonctionner.
Liste des composants
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 54/68
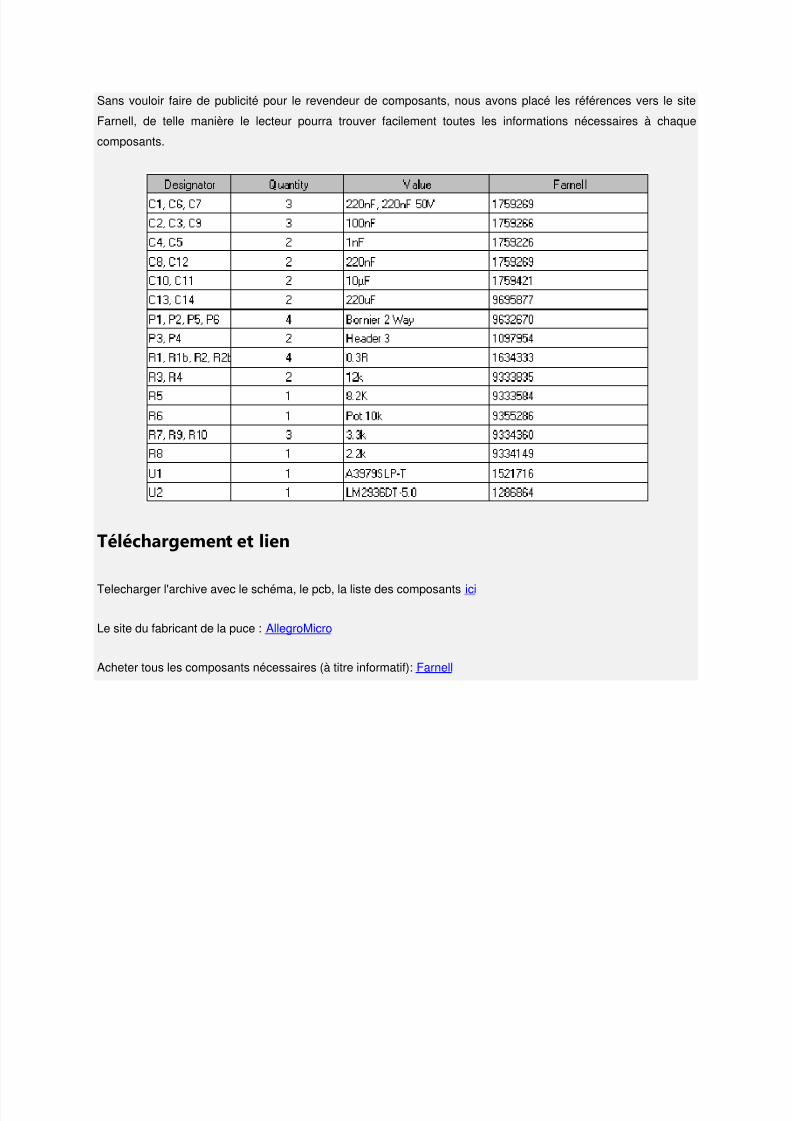
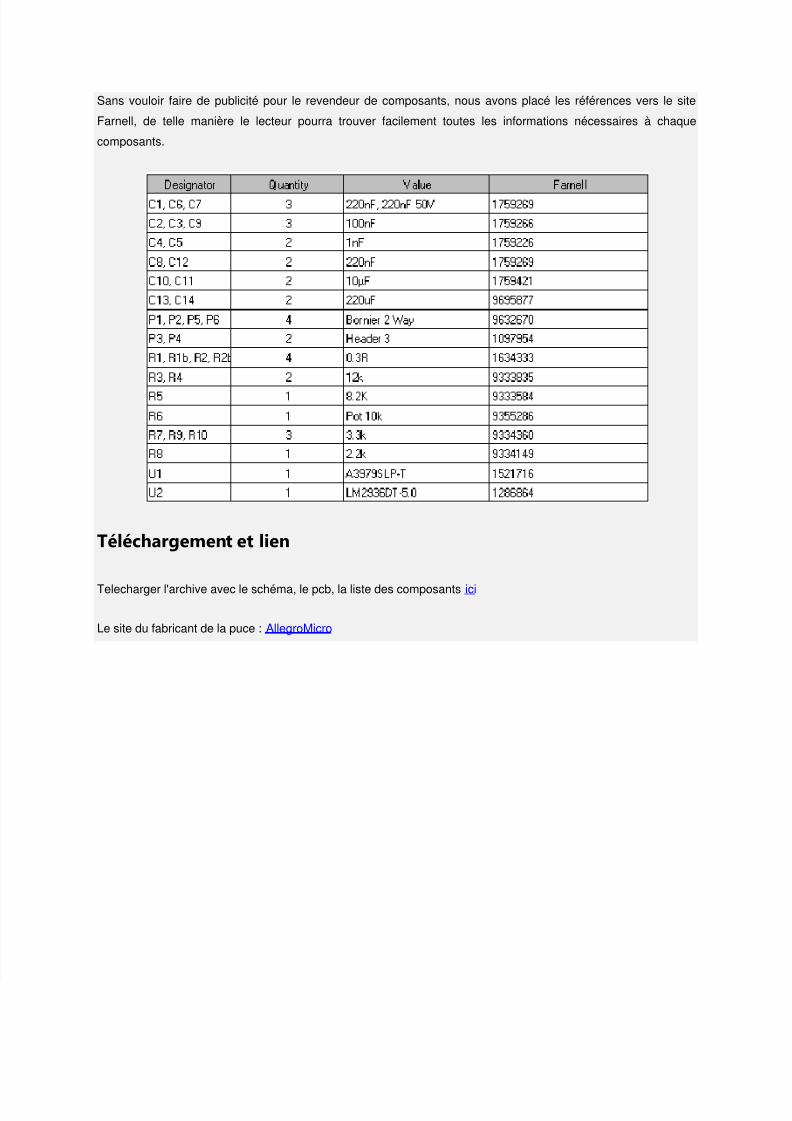
Sans vouloir faire de publicité pour le revendeur de composants, nous avons placé les références vers le site
Farnell, de telle manière le lecteur pourra trouver facilement toutes les informations nécessaires à chaque
composants.
Téléchargement et lien
Telecharger l'archive avec le schéma, le pcb, la liste des composants ici
Le site du fabricant de la puce : AllegroMicro
Acheter tous les composants nécessaires (à titre informatif): Farnell
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 55/68
Le moteur pas à pas bipolaire
Pour ceux qui ont déjà visité ce site, ils ont pu découvrir les moteurs pas à pas dans différentes utilisations.
L'objectif de cet article est d'expliquer la base du fonctionnement de ce type de moteur de manière à créer par la
suite une électronique permettant de contrôler proprement le déplacement de celui-ci. Cet article n'a pas la
prétention de percer tous les mystères du moteur pas à pas. Il existe des livres complets à ce sujet. Nous nous
limiterons à une explication simplifiée et imagée.
Introduction
Le moteur pas à pas, ou encore stepper motor, est un moteur particulier pour lequel sa rotation s'effectue par
pas. C'est à dire, qu'à l'inverse d'un petit moteur à courant continu comme on trouve dans nombreux jouets et qui
tourne sans arrêt un fois alimenté, le moteur pas à pas tourne d'un angle spécifique à chaque fois qu'il reçoit une
impulsion. Mais comme nous allons le découvrir, ces impulsions ont besoin d'un formatage bien particulier.
Les principales caractéristiques du moteur pas à pas sont:
Sa résolution: par exemple 200 pas par tour, c'est à dire qu'à chaque impulsion l'axe du moteur tourne de 1.8°
(360°/200).
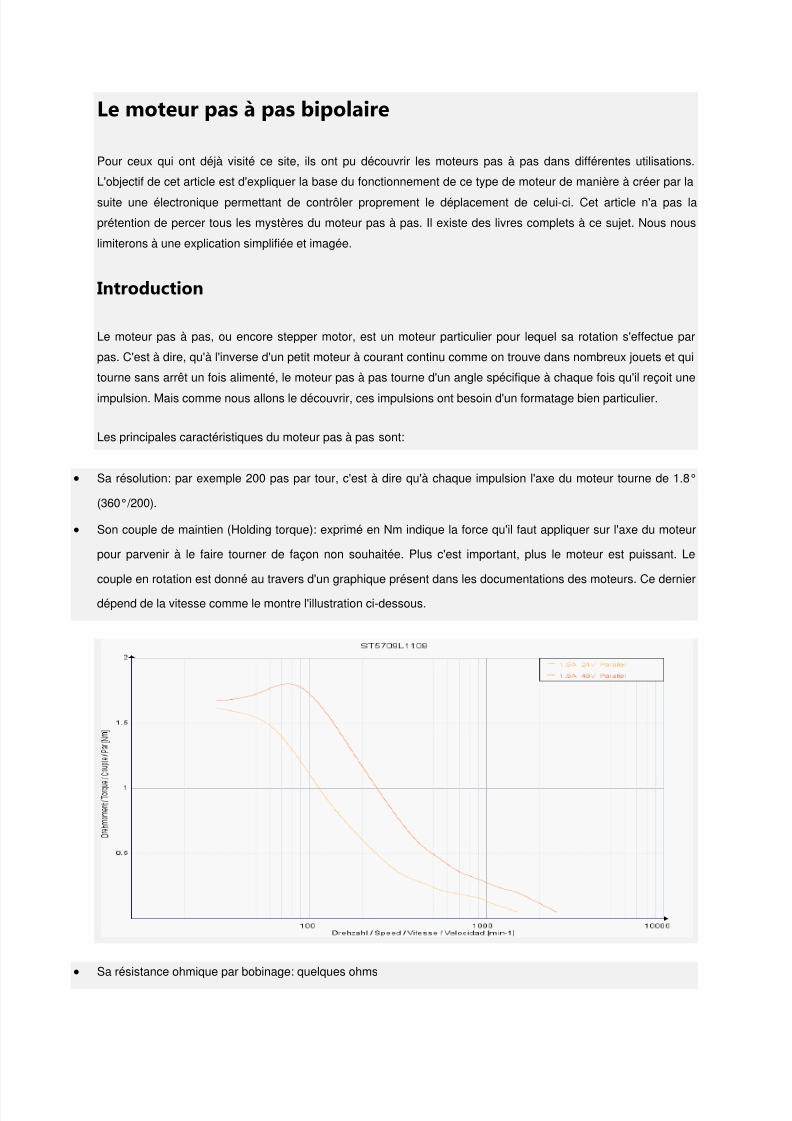
Son couple de maintien (Holding torque): exprimé en Nm indique la force qu'il faut appliquer sur l'axe du moteur
pour parvenir à le faire tourner de façon non souhaitée. Plus c'est important, plus le moteur est puissant. Le
couple en rotation est donné au travers d'un graphique présent dans les documentations des moteurs. Ce dernier
dépend de la vitesse comme le montre l'illustration ci-dessous.
Sa résistance ohmique par bobinage: quelques ohms
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 56/68
Son courant max par bobinage: de quelques mA à plusieurs Ampères. En cas de dépassement, risque de brûler
le moteur.
Son poids, ses dimensions (souvent normalisées NEMA17,23,...)
Le moteur pas à pas est un moteur qui fonctionne en "boucle ouverte", c'est à dire que de base dans le moteur,
pour fonctionner, il n'y a aucun retour. Si vous envoyez une impulsion pour la réalisation d'un pas (une demande
de rotation) et que pour une raison, le pas ne s'exécute pas (l'axe est bloqué) vous n'aurez aucun retour. Ce que
l'on appelle un saut de pas.
Bobinage et contrôle
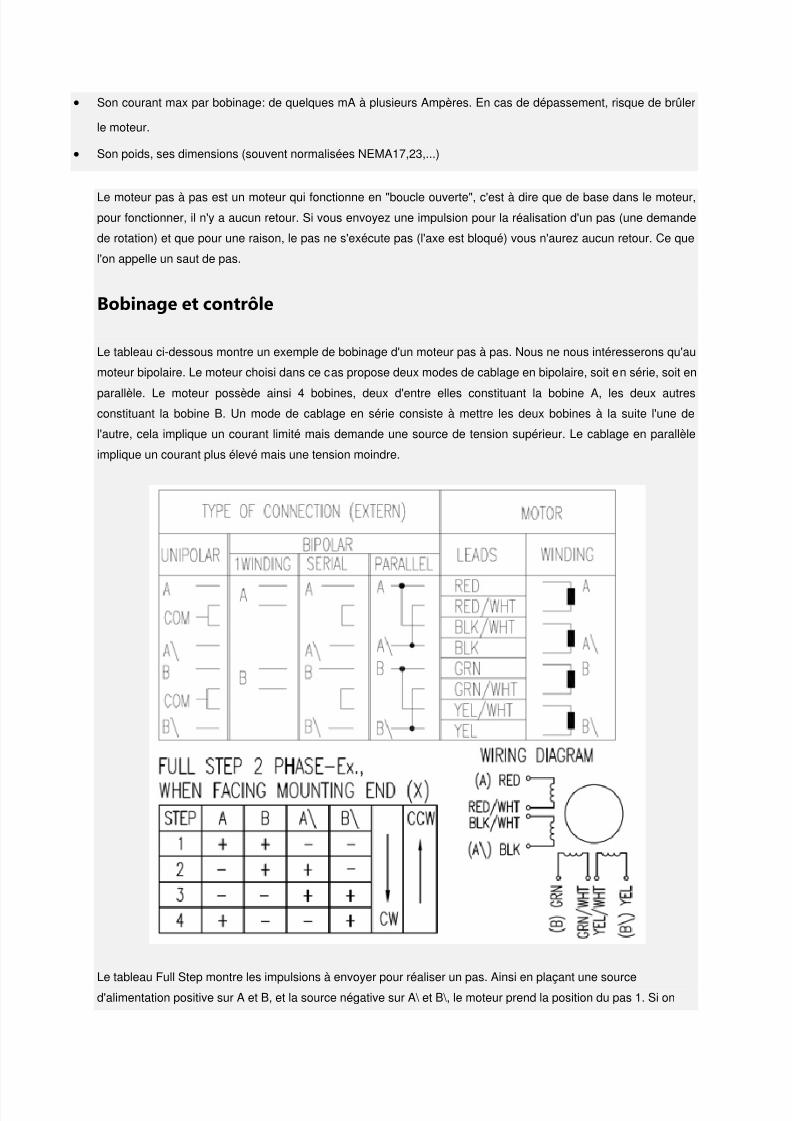
Le tableau ci-dessous montre un exemple de bobinage d'un moteur pas à pas. Nous ne nous intéresserons qu'au
moteur bipolaire. Le moteur choisi dans ce cas propose deux modes de cablage en bipolaire, soit en série, soit en
parallèle. Le moteur possède ainsi 4 bobines, deux d'entre elles constituant la bobine A, les deux autres
constituant la bobine B. Un mode de cablage en série consiste à mettre les deux bobines à la suite l'une de
l'autre, cela implique un courant limité mais demande une source de tension supérieur. Le cablage en parallèle
implique un courant plus élevé mais une tension moindre.
Le tableau Full Step montre les impulsions à envoyer pour réaliser un pas. Ainsi en plaçant une sourced'alimentation positive sur A et B, et la source négative sur A\ et B\, le moteur prend la position du pas 1. Si on
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 57/68
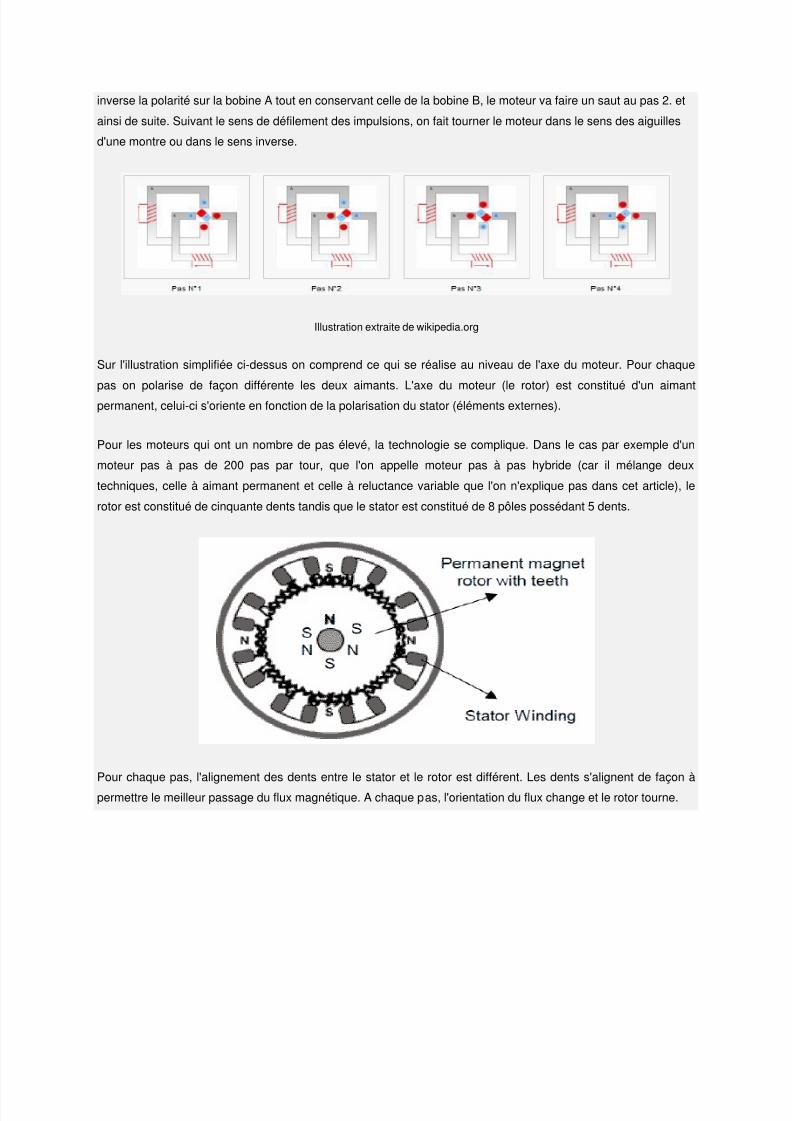
inverse la polarité sur la bobine A tout en conservant celle de la bobine B, le moteur va faire un saut au pas 2. et
ainsi de suite. Suivant le sens de défilement des impulsions, on fait tourner le moteur dans le sens des aiguilles
d'une montre ou dans le sens inverse.
Illustration extraite de wikipedia.org
Sur l'illustration simplifiée ci-dessus on comprend ce qui se réalise au niveau de l'axe du moteur. Pour chaque
pas on polarise de façon différente les deux aimants. L'axe du moteur (le rotor) est constitué d'un aimantpermanent, celui-ci s'oriente en fonction de la polarisation du stator (éléments externes).
Pour les moteurs qui ont un nombre de pas élevé, la technologie se complique. Dans le cas par exemple d'un
moteur pas à pas de 200 pas par tour, que l'on appelle moteur pas à pas hybride (car il mélange deux
techniques, celle à aimant permanent et celle à reluctance variable que l'on n'explique pas dans cet article), le
rotor est constitué de cinquante dents tandis que le stator est constitué de 8 pôles possédant 5 dents.
Pour chaque pas, l'alignement des dents entre le stator et le rotor est différent. Les dents s'alignent de façon àpermettre le meilleur passage du flux magnétique. A chaque pas, l'orientation du flux change et le rotor tourne.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 58/68
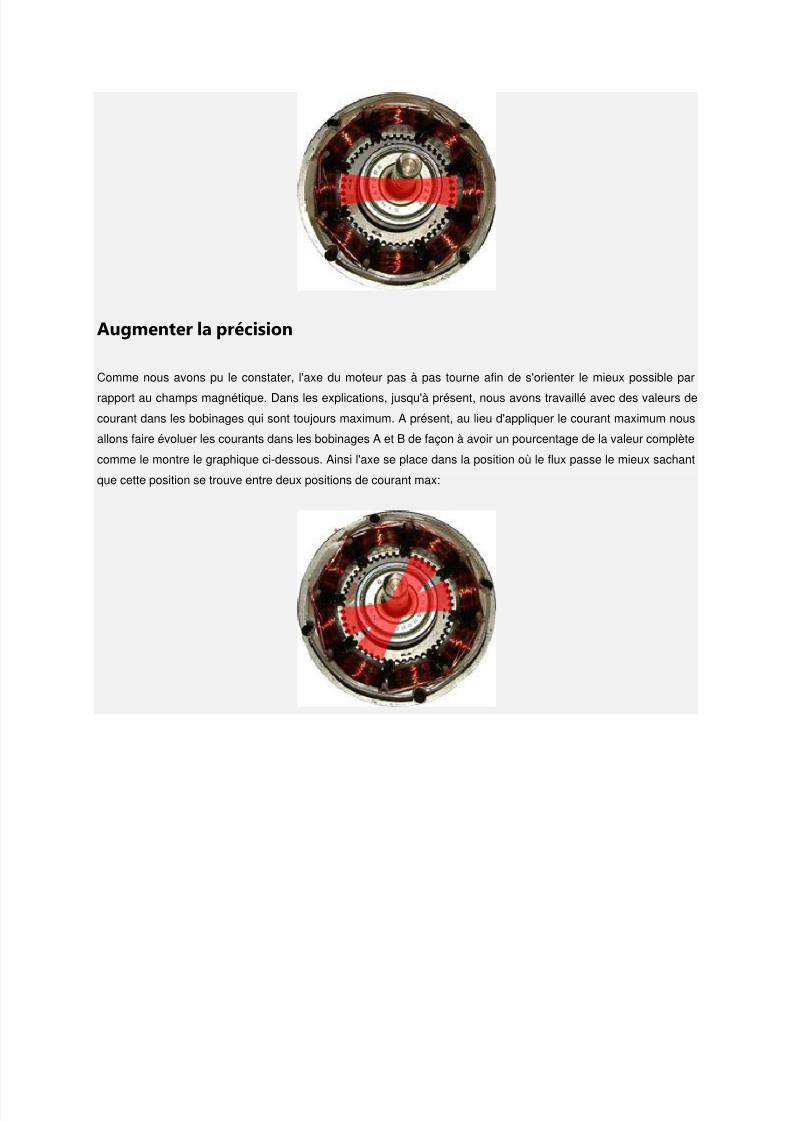
Augmenter la précision
Comme nous avons pu le constater, l'axe du moteur pas à pas tourne afin de s'orienter le mieux possible par
rapport au champs magnétique. Dans les explications, jusqu'à présent, nous avons travaillé avec des valeurs de
courant dans les bobinages qui sont toujours maximum. A présent, au lieu d'appliquer le courant maximum nous
allons faire évoluer les courants dans les bobinages A et B de façon à avoir un pourcentage de la valeur complète
comme le montre le graphique ci-dessous. Ainsi l'axe se place dans la position où le flux passe le mieux sachant
que cette position se trouve entre deux positions de courant max:

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 59/68
Dans ce cas-ci, chaque pas du moteur est divisé en 4. c'est à dire qu'entre la position maximal du courant et la
position 0 on divise en 4 pallier. De telle manière un moteur qui réalisait 200 pas par tour en réalise 800 àprésent.
Bien évidemment pour contrôler un moteur de cette manière il est nécessaire d'avoir une électronique évoluée.
Celle que l'on va proposer sur ce site permet de diviser chaque pas du moteur jusqu'à 16 fois.
Un drive performant pour moteur pas à pas

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 60/68
Nous avons vu précédemment que pour contrôler un moteur pas à pas il est nécessaire de changer la polarité
des bobines pour chaque pas. De plus si on souhaite contrôler en divisant les pas (microstepping) il est
nécessaire de contrôler le courant circulant. Ce qui devient une tâche bien difficile. Heureusement il existe des
puces qui rendent ce travail complètement transparent, il restera uniquement à placer derrière un microcontroleur
qui envoie des impulsions à la vitesse de rotation souhaitée.
La puce A3979 d'AllegroMicro est un composant intégré dans lequel on trouve deux ponts en H pour controler un
moteur pas à pas (étage de puissance).Mais également toutes les fonctions permettant de traduire les
impulsions, de calculer les courants qui circulent dans le moteur et réguler ce dernier, ... .Un composant comme
ce dernier intègre toutes les fonctions nécessaires pour faire tourner un moteur pas à pas. Il ne reste qu'à placer
derrière un signal envoyant des impulsions pour commander les pas et un autre indiquant le sens de rotation pour
faire tourner le moteur.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 61/68
Cette puce peut commander des moteurs jusqu'à des courants de +/- 2.5A pour une tension d'alimentation
maximum de 35V. Elle peut diviser les pas des moteurs par 2, 4ou 16 fois. Nous aurons vite compris que cette
petite puce peut s'interfacer directement avec un microcontroleur et que ce dernier peut alors contrôler très
simplement un moteur pas à pas. Néanmoins faut-il encore monter la puce correctement.
Schéma
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 62/68
Les paramètres
Comme conseillé dans le datasheet, nous placerons une capacité C1 de 220nF entre CP1 et CP2 pour générer
les tensions nécessaires au fonctionnement de la puce. La capacité C7 de 220nF permet d'amortirla commutation
des portes de sorties.
L'entrée Ref permet de paramétrer le courant max qui circulera dans le moteur, le calcul n'est pour ça pas
compliqué:

5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 63/68
Dans notre cas, RS vaut 0.15Ohm. De manière à éviter d'envoyer par erreur un courant trop important, nous
avons bridé la tension maximale qui peut être présente au point milieu du potentiometre R6 (10k) au travers de larésistance R5 (8.2k). De cette manière, Vref ne peut excéder 2.75V. Soit Itrip ne peut être plus important que
2.3A qui est inférieur à 2.5A. La capacité C8 (220nF) permet de filtrer la tension continue présente sur Vref.
Les paramètres RC1/RC2 gèrent la constante de temps. Plus elle est faible, plus la régulation du courant sera
précise mais au détriment des pertes dans la commutation des mosfets. Dans notre cas, nous avons placé 1nF
pour C4 et C5 et 12Kohms pour R3 et R4.
Le paramètre PFD est certainement le point le plus compliqué de ce montage. Nous allons tenter de l'expliquer
simplement. Lors de la commutation des mofsets du H Bridge qui permettent de controler le moteur, l'énergie
accumulée dans la bobine par le courant (représenté en bleu dans la figure ci-dessus) doit se vider. Ceci peut se
faire de deux manières: soit au travers des diodes schottky (en rouge), manière qui représente le mode Fast
Decay (décroissance rapide du courant) soit par le chemin représenté en vert, qui est le mode slow decay en
décalant la fermeture d'un des mosfets. Quel est le meilleur mode? On choisit le mode que l'on souhaite en
fonction de l'application, si le moteur doit tourner lentement (slow decay), ou rapidement (Fast Decay).
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 64/68
La puce A3979 est dotée d'un système mixte qui permet d'utiliser le mode "fast decay" pendant un temps (à partir
du moment où le courant max est atteint) dépendant de la constante RC et de la tension appliquée sur PFD.
Pendant l'autre partie du temps, le mode "slow decay" est utilisé. Ceci a pour but d'essayer de fournir un courant
le plus sinusoïdal possible pour le contrôle du moteur (et éviter des résonances). Idéalement le paramètre PFD
doit être ajustable. Dans notre cas, nous avons fixé ce paramètre car jouer avec ce dernier est compliqué. la
valeur choisie (de 2 Volt) semble convenir à notre application (R7: 3.3KOhms et R8: 2.2KOhms).
Le réglage fin du PFD permet de diminuer le bruit du moteur, mais aussi d'accroitre la précision des pas et de
diminuer les pertes d'énergie.
Le paramètre MS1/2 permet de sélectionner la division des pas:
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 65/68
En plaçant les entrées à +5V ou à la masse au travers d'un jumper, on configure la résolution. Attention, il est
conseillé de changer la résolution à froid (couper l'alimentation de la carte).
Les résistances R1/b et R2/b sont les résistances qui permettent à la puce d'avoir un feedback sur le courant qui
circule dans le moteur. Sans ces résistances il serait impossible de contrôler le courant, et encore moins de
diviser les pas. Nos calculs nous ont amené à placer une résistance de 0.15Ohms, comme nous avons eu
quelques difficultés à trouver cette valeur, nous avons placé deux résistances de 0.15Ohms.
Les fonctions sleep, home, enable et reset ne sont pas utilisées dans notre application. Rien n'empêche le lecteur
attentif de refaire son schéma en intégrant ces fonctions.
Le PCB et le montage
La carte que l'on propose fait 45*36mm, elle peut s'intégrer facilement dans de nombreuses structures. La
connectique est principalement réalisée au travers de borniers vissables.
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 66/68
Le pcb est en double couche, il faudra faire attention de garantir la connectivité électrique entre les couches. Le
dessin, ainsi que le schéma et la BOM se trouvent dans le pdf disponible en téléchargement.
Le composant A3979 est pin to pin compatible avec l'A3977, néanmoins nous avons préféré travailler avec le 79
plus récent et qui permet une division des pas plus importante.
La puce possède un pad thermique. Pour cette raison nous avons placé sous le composant une surface de cuivre
reliée à la masse. Il est important de placer de la pâte thermique sur ce pad thermique avant de la souder. On
remarque un ensemble de vias qui sont des vias thermiques qui permettent de communiquer la chaleur vers le
plan de masse au bottom pour accroitre la dissipation de la chaleur.
A l'exception des connecteurs, la carte est faite entièrement de composants montés en surface. Cela peut faire
peur à certains, mais avec l'habitude on comprend que ce mode de montage est plus agréable et plus solide.
Nous ne donnerons pas d'explication dans cet article sur la façon de souder la carte.
Il est conseillé de monter tous les composants à l'exception du A3979. Avant de souder ce dernier, reportez-vous
au mode d'emploi ci-dessous.
Nous retiendrons l'attention du lecteur sur les capacités C14 et C13. Il y a deux capacités mais une seule est
nécessaire. Si l'utilisateur préfère avoir les composants "connecteur" au top ou au bottom, il soudera la capacité
du coté voulu (comme elle est plus volumineuse que les autres composants).
Sur la puce A3979, nous conseillons de placer un petit dissipateur tel que celui-ci: Ref Farnell 4302175.
Mode d'emploi
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 67/68
La première chose à faire, avant de souder la puce A3979, est de vérifier toutes les tensions. Pour cela, vérfiez
premièrement que vous avez bien 5V sur la capacité C10. Attention, ne pas négliger la valeur de C10 et C11, il
est vraiment important pour le regulateur 5V qu'elles fassent au moins 10uF. Personellement, j'ai branché une
alimentation 24V. Sur certains moteurs pas à pas on parle d'une tension par phase. Ce n'est pas utile, le moteur
est ici contrôlé en courant. Il est conseillé de placer une tension supérieure à la valeur nominale par phase du
moteur. Le drive s'occupera du reste. Si vous n'avez pour votre moteur que l'indication de la tension et la
résistance de la bobine, la loi d'ohm est votre ami U=R*I.
Vérifiez également la tension sur le point de mesure VRef. Il est conseillé de placer le niveau souhaité sur la
résistance ajustable pour avoir le courant voulu sur votre moteur: I = Vref / 1.2 .
Coupez l'alimentation et soudez la puce A3979 et cablez le moteur comme indiqué sur le schéma.
Pour la configuration de la division des pas, toujours l'effectuer hors tension. P3=MS1 et P4=MS2. Placez les
jumpers de manière à respecter le tableau présenté plus haut (Vers le bord de la carte pour High et vers l'intérieur
pour Low).
L'entrée Pas est l'entrée TTL où les impulsions doivent être entrées. Pour réaliser un premier test placez 100Hz
carré, 0-5V. L'entrée Direction, placez 0V ou 5V en fonction du sens de rotation souhaité.
Tout devrait bien fonctionner.
Liste des composants
5/17/2018 moteurs pas à pas - slidepdf.com
http://slidepdf.com/reader/full/moteurs-pas-a-pas-55b07b6718079 68/68
Sans vouloir faire de publicité pour le revendeur de composants, nous avons placé les références vers le site
Farnell, de telle manière le lecteur pourra trouver facilement toutes les informations nécessaires à chaque
composants.
Téléchargement et lien
Telecharger l'archive avec le schéma, le pcb, la liste des composants ici
Le site du fabricant de la puce : AllegroMicro
Recommended

















