Overview of Autonomous Systems LaboratoryMarco Pavone Autonomous Systems Laboratory Department of Aeronautics and AstronauticsStanford University
PTV Scientific Advisory BoardWinter meeting
January 10, 2016
Autonomous Systems LabASL
About MeBio:• Assistant Professor (2012 - present),
Stanford University, Aeronautics and Astronautics • Research Technologist (2010 - 2012),
NASA JPL, Robotics Section• Ph.D. in Aeronautics and Astronautics (2010),
Massachusetts Institute of Technology• BS and MS in Computer Science (2005),
University of Catania and Scuola Superiore of Catania
Highlights: • Research interests: robotics, optimization, intelligent transportation systems• PECASE Award (2017)• NSF CAREER Award (2015)• NASA Early Career Faculty Award (2012)• Invited to the White House and the US Senate to speak on autonomous vehicles • Best paper nominations/awards at Field and Service Robotics Conference (2015), at
Robotics: Science and Systems Conference (2014), and at NASA symposia (2015)

Autonomous Systems
Autonomous Systems
Courtesy of Google Courtesy of Amazon
Courtesy of DARPA Courtesy of JPL
Autonomous Systems
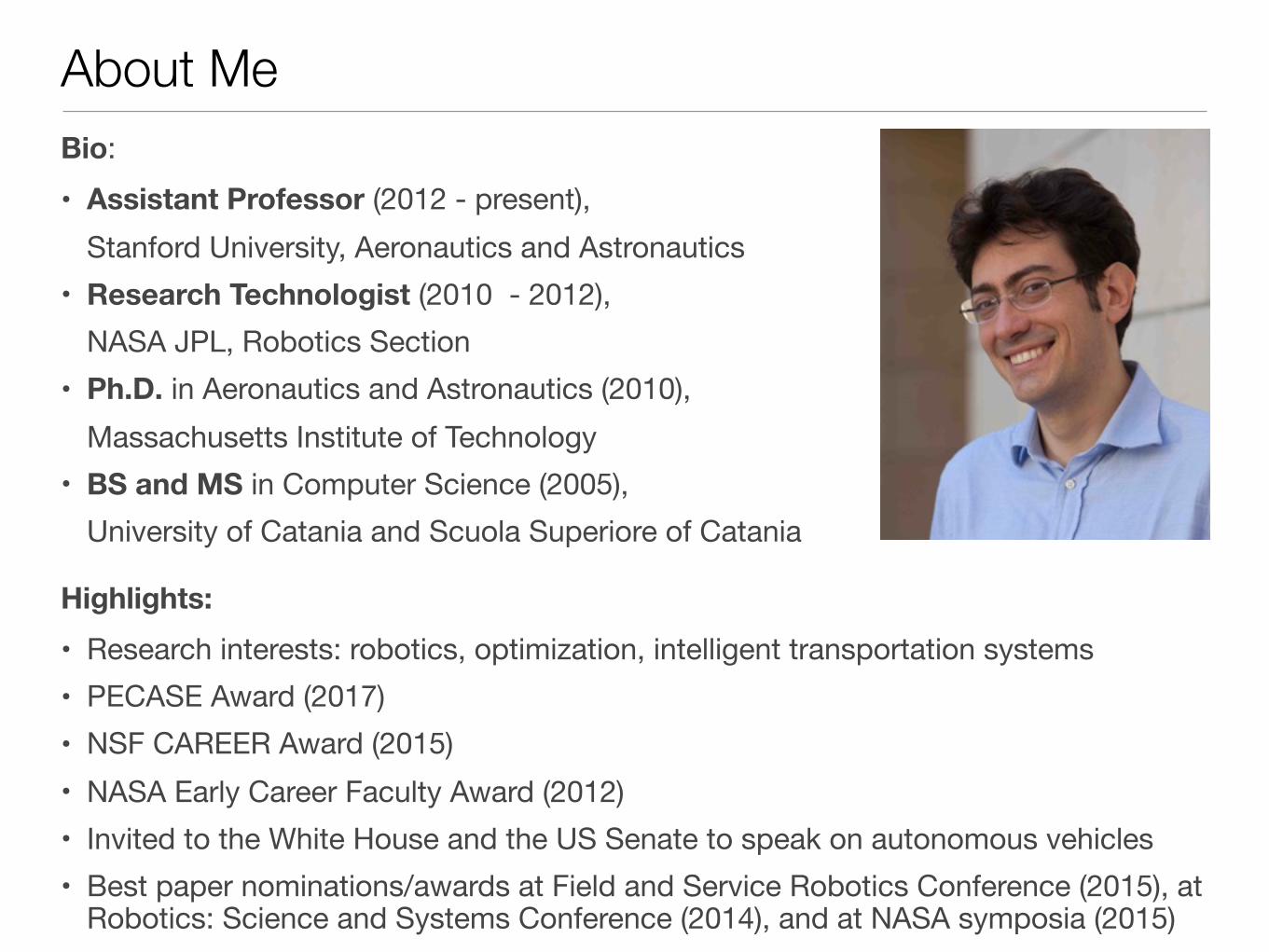
• Automation: system limited to specific actions for pre-programmed situations
How can we endow a machine with the capability of making rapid and reliable decisions without knowing a priori all situations that might occur?
• Autonomy: system reacts to situations that were not pre-programmed or anticipated at the design stage
Courtesy of FIAT Courtesy of eHang
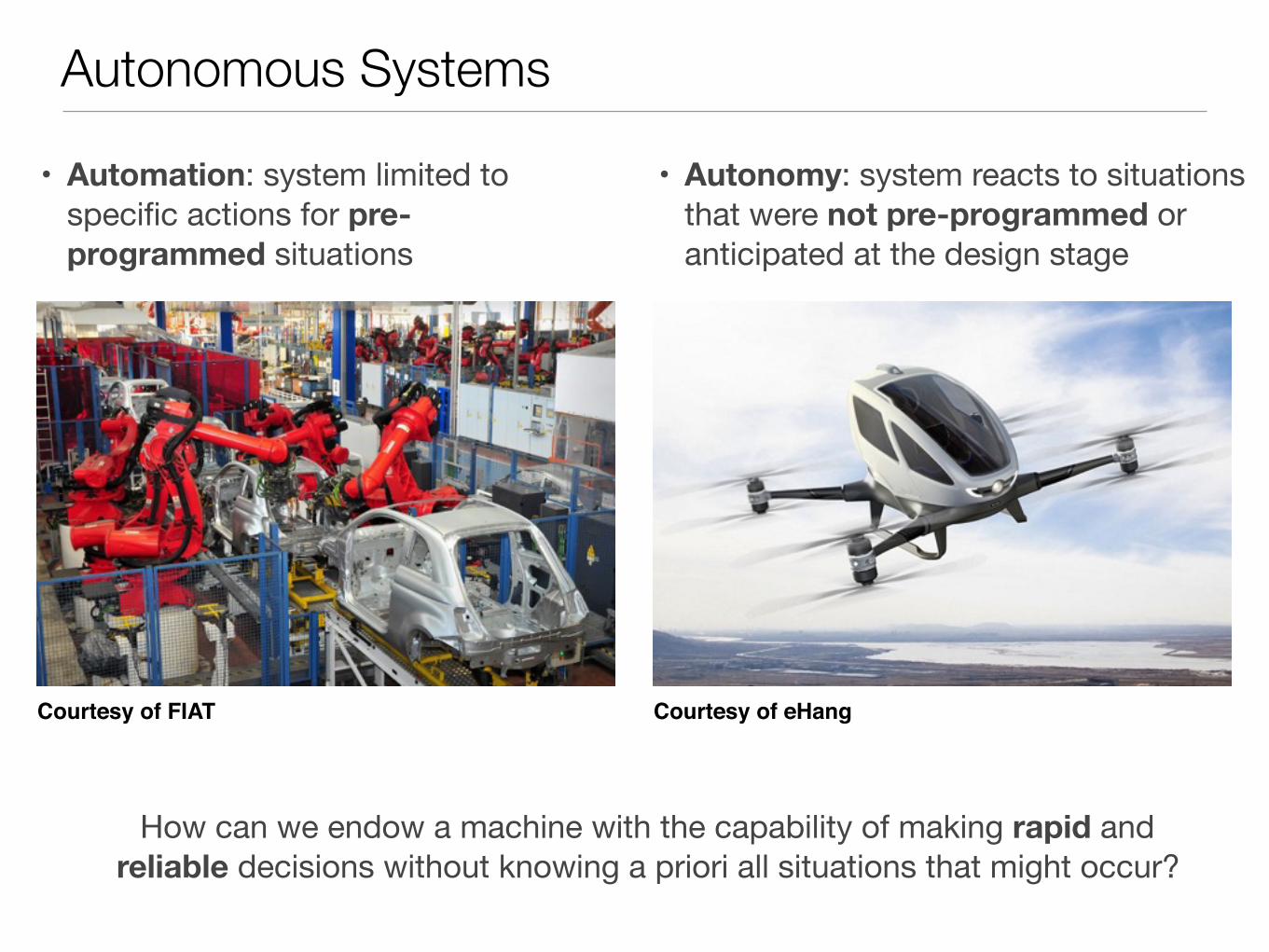
Research Synopsis
Machine LearningReal-Time Control/Optimization
Distributed Computing
Enabling Technologies
Research Areas
Controlling Individual AS:- Robotic Motion Planning
- Risk-Sensitive Decision-Making
Deploying AS:- Autonomous Spacecraft/Space Robots- Autonomous Transportation Networks
Autonomous Systems (AS)Key Approach:
Optimization-Based Control
Controlling Networked AS:- Task-Based Coordination of Robots
- Complexity Theory for Robotic Networks

Agile Autonomous Systems
In collaboration with Toyota, Northrop Grumman, and Qualcomm
Autonomous Mobility-on-DemandVehicle Autonomy Car Sharing
+"Autonomous Mobility-On-Demand (AMoD)
Research objectives: 1. Modeling: stochastic models for tractable analyses2. Control: real-time routing of autonomous vehicles at a city-wide scale3. Applications: case studies and technology infusion
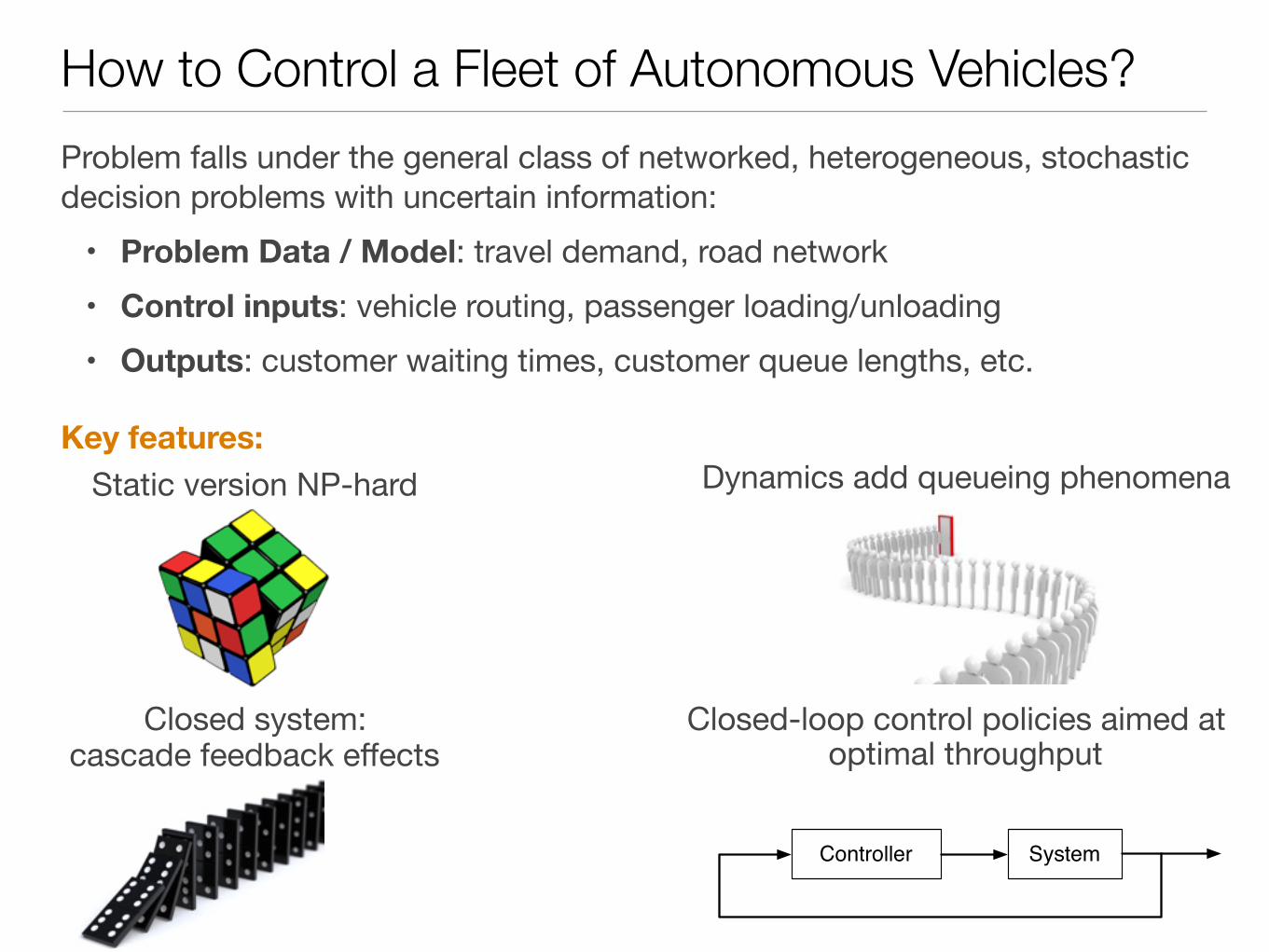
How to Control a Fleet of Autonomous Vehicles?Problem falls under the general class of networked, heterogeneous, stochastic decision problems with uncertain information:• Problem Data / Model: travel demand, road network• Control inputs: vehicle routing, passenger loading/unloading• Outputs: customer waiting times, customer queue lengths, etc.
Key features:Static version NP-hard Dynamics add queueing phenomena
Closed system:cascade feedback effects
Closed-loop control policies aimed at optimal throughput
SystemController

A Family of Models for Control and Evaluation
Distributed queueing-theoretical models
Lumped queueing-theoretical models
(Stochastic) MPC models
Macroscopic Microscopic
Analytical Computational
Overarching goals: 1. Theoretical insights and guidelines for system design2. Real-time control algorithms3. Formal guarantees for stability and performance
[Pavone, MIT ’10], [Treleaven, Pavone and Frazzoli, TAC ’13]
[Pavone, Smith, Frazzoli, Rus, IJRR ’12],[Zhang, Pavone, IJRR ’15][Zhang, Rossi, Pavone, RSS ‘16]
[Zhang, Rossi, Pavone, ICRA ’16]
Complements simulation-based methods such as [Osorio, Bierlaire, OR ’13], [Fagnant, Kockelman, TR C ’14], [Fagnant, Kockelman, Bansal, JTRB ’15], [Shen, Lopes, PRIMA ’15].Leverages vast literature on VRP [Toth, Vigo, ’14], DTA [Janson, TRB, ’91], and queueing theory [Larson, Odoni, ’81], [Gelenbe, Pujolle, Nelson, ‘98], [Osorio, Bierlaire, OR ’09]
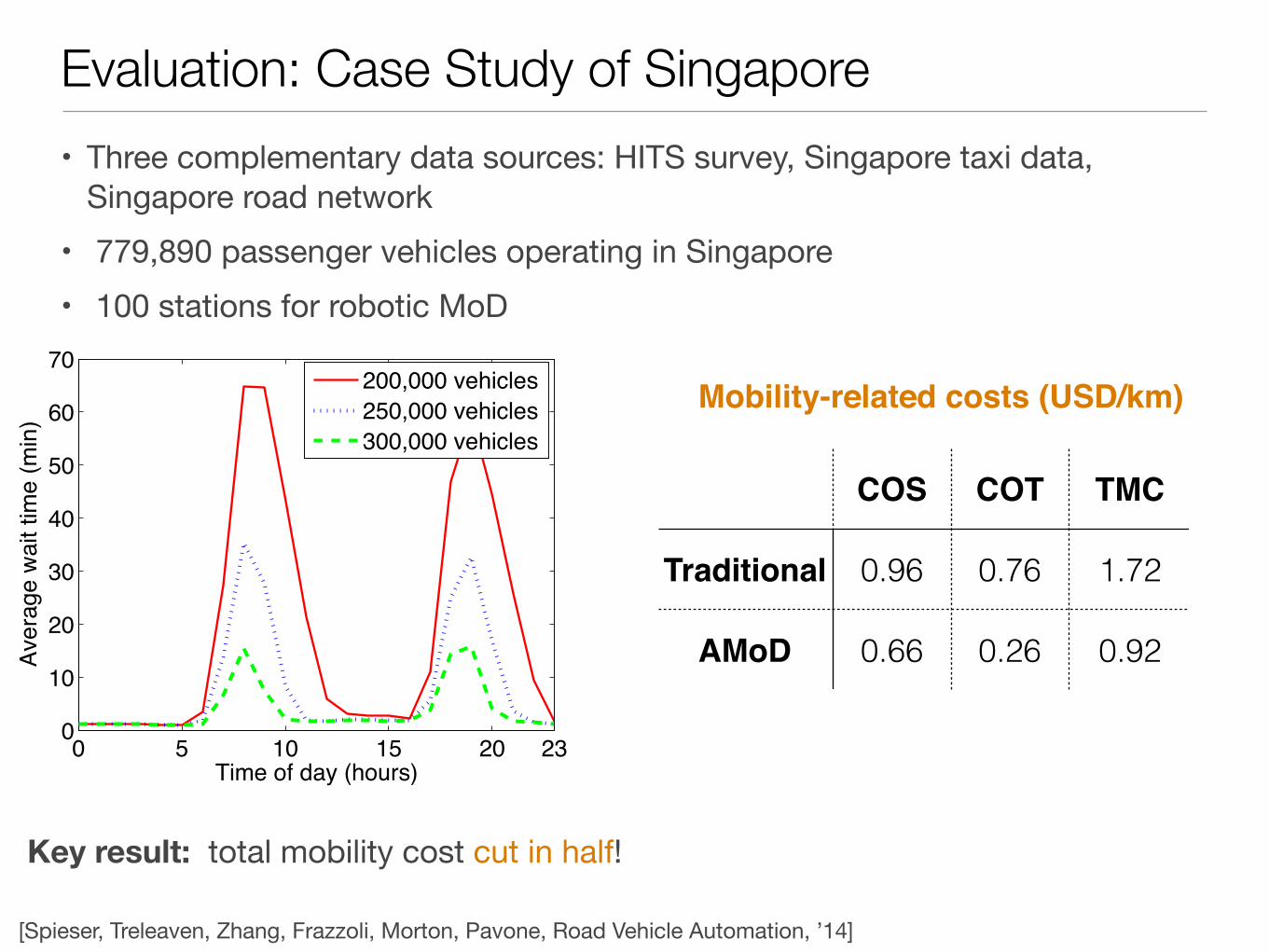
Evaluation: Case Study of Singapore• Three complementary data sources: HITS survey, Singapore taxi data,
Singapore road network• 779,890 passenger vehicles operating in Singapore• 100 stations for robotic MoD
0 5 10 15 20 230
10
20
30
40
50
60
70
Time of day (hours)
Aver
age
wai
t tim
e (m
in)
200,000 vehicles250,000 vehicles300,000 vehicles
COS COT TMC
Traditional 0.96 0.76 1.72
AMoD 0.66 0.26 0.92
Mobility-related costs (USD/km)
[Spieser, Treleaven, Zhang, Frazzoli, Morton, Pavone, Road Vehicle Automation, ’14]
Key result: total mobility cost cut in half!

Conclusions1. Autonomous driving might lead to a transformational paradigm for personal
urban mobility (to improve or sustain current mobility needs)2. Integration of system-wide coordination and autonomous driving gives rise
to an entirely new class of problems at the interface of robotics and transportation research
3. Solutions to these problems are key to enable autonomous MoD and to carefully evaluate their value proposition
11
Future research directions:• Heterogeneity: multi-modal, smart grid, & society
Acknowledgements: NSF CAREER Award, Car2Go, Toyota, collaborators at Stanford (Ramon Iglesias, Federico Rossi, and Rick Zhang), MIT, and Singapore
Contact: [email protected]
Charging demandEnergy storage
Electricity pricesEnergy provision
Power network
Transportation network
Recommended