Presentation to IMEWG, July 8, 2008
Preliminary Planning for an International Mars Sample Return Mission iMARS Working Group

2
This afternoon’s agenda
Introduction 10 BeatyMission rationale, Science objectives, Samples needed to achieve objectives 25 BeatyScience System, Science Management 25 GradyDISCUSSION 15short break 10
Draft Requirements 15 MayOverall Architecture 15 PradierMission Analysis 20 JordanProtecting the Earth, Mars, and the samples 20 KminekFlight and Ground System Summary 20 MouraDISCUSSION 15short break 10
Development Timeline 15 MouraInvestment Plan 10 MaySummary of Primary Conclusions, Next Steps 15 Beaty
240
OVERALL DISCUSSION 60

3
Introduction
David Beaty

4
iMARS’ Objective
Produce a plan for an internationalized MSR
“The overarching goal of this activity is to identify how international cooperation might enable sample return from Mars, document the existing state-of-knowledge on return of samples from Mars, develop international mission architecture options, identify technology development milestones to accomplish a multi-national mission, and determine potential collaboration opportunities within the architecture and technology options and requirements, and current Mars sample return mission schedule estimates of interested nations. The activity will also identify specific national interests and opportunities for cooperation in the planning, design, and implementation of mission-elements that contribute to sample return. The Working Group’s final product(s) is expected to be a potential plan for an internationally sponsored and executed Mars sample return mission.”
From the iMARS* Terms of Reference (source: IMEWG)
*International Mars Architecture for the Return of Samples

5
iMARS—The Team
31 primary participants, originating from three sources. Within team discussions, all participants treated equally
National DelegatesBeaty, David (USA)Grady, Monica (UK)Moura, Denis JP (France/ Italy)Bibring, Jean-Pierre (France)Bridges, John (UK)Daerden, Frank (Belgium)Flamini, Enrico (Italy)Hipkin, Victoria (Canada)Hode, Tomas (Sweden)Jordan, Frank (USA)Kato, Manabu (Japan)Mani, Peter (Switzerland)Muller, Christian (Belgium)Ori, Gian Gabriel (Italy)Walter, Malcolm (Australia)
Agency ParticipantsGardini, Bruno (ESA), Member--IMEWGMcCuistion, Doug (NASA), Member--IMEWGKminek, Gerhard (ESA)Santovincenzo, Andrea (ESA)Khan, Michael (ESA)Pradier, Alain (ESA)Conley, Catharine (NASA)May, Lisa (NASA)Meyer, Michael (NASA)
Technical ParticipantsAllen, Carlton (USA, curation facility planning)Westall, Frances (France, sample science planning)Hayati, Samad (USA, technology planning)Buxbaum, Karen (USA, planetary protection planning)Mattingly, Richard (USA, system engineering)Stabekis, Pericles (USA, planetary protection planning)Fisackerly, Richard (ESA, technology planning)
NOTE: Participation was nominated by national agencies.

6
iMARS’ Functional Organization, Processes
Steering Committee• David Parker, UK• Bruno Gardini, ESA• Doug McCuistion, NASA
IMARS co-chairs• David Beaty, USA• Monica Grady, UK
Engineering Subteam• Denis Moura, CNES/ASI
Facility/PP Subteam• Gerhard Kminek, ESA
Science Subteam• Monica Grady, UK
MEPAG ND-SAG• Lars Borg• Dave Des Marais• Dave Beaty
Biweekly telecons Biweekly telecons
Weekly telecons
Process Summary• Start Sept. 2007• Quarterly full meetings• Lots of subteam telecon, e-mail, some subteam meetings
• IMARS Leadership Team: Biweekly telecons
CONCENTRATED TECHNICAL ANALYSES

7
Mission Rationale, Science Objectives, Samples Needed to Achieve ObjectivesDavid Beaty

8
MSR Mission Rationale
Mars Sample Return (MSR) is an important mission for science because:• About half of the currently proposed investigations of Mars (e.g.
MEPAG’s list of 55 investigations) could be addressed by MSR– MSR is the single mission that would make the most progress towards the
entire list.
• A significant fraction of these investigations could not be meaningfully advanced without returned samples.
• Mars meteorites are useful for some, but not all Mars questions.– many key sample types are not represented
– The Mars meteorites are from unknown localities on Mars—the absence of sample context limits possible interpretation.
• After the recent phase of remote sensing observation from orbit (ODY, Mars Express, MRO), and the on-going surface missions (MER, Phoenix, MSL, ExoMars), the next step to make decisive advances in Mars exploration and prepare human missions is to analyze samples on the Earth with the most advanced techniques

9
Why Return Samples?
There are three primary reasons why MSR would be of such high value to science.
1. Complex sample preparation, sample decisions
Image courtesy Dimitri Papanastassiou
Image courtesy Carl Allen

10
Why Return Samples?
3. Instrumentation 2. Analysis Adaptability
• Best accuracy/precision• Diversity—results could be
confirmed by alternate methods• Instruments not limited by mass,
power, V, T, reliability, etc.• Calibration, positive and negative
control standards• Future instrument developments
….
JSC TEM lab, courtesy Lisa Fletcher
UC
LA
Me
ga
SIM
S la
b,
cou
rte
sy K
evi
n M
cKe
eg
an
• Not limited by prior hypotheses

11
Relationship between Candidate Science Objectives and Sample Types
Objective Nickname Sed
imen
tary
su
ite
Hyd
roth
erm
al
suit
e
Lo
w-T
W/R
su
ite
Ign
eou
s S
uit
e
Dep
th-
Res
olv
ed S
uit
e
Reg
oli
th
Du
st
Ice
Atm
osp
her
ic
Gas
Habitability H H L L M L L LPre-biotic, life H H L M M L
water/ rock H H H MGeochronology M M H
Sedimentary record H MPlanetary evolution H M M
Regolith M H MRisks to human explorers L H H M
Oxidation H H M MGas chemistry M M M H
Polar M H M
Rocks Other
main types of required samples

12
Some Key Attributes of the Sample Collection
• Samples organized in suites
• Minimum necessary sample size/mass
• Minimum necessary number of samples
• Sample preservation needs (chemical, mechanical, and thermal)

13
Suites of samples are needed
Endurance Crater, July 19, 2004
(Opportunity Sol 173)
KaratepeMSR would have its greatest value if the samples are organized into suites that represent the diversity of the products of various planetary processes.
• Similarities and differences between samples in a suite could be as important as the absolute characterization of a single sample
• The minimum number for a suite of samples is thought to be 5-8 samples.
Clark et al., 2005 (EPSL)

14
Sample size/mass
• The decision on sample size would be a trade between individual sample mass and total number of samples. – If the samples are too small, a given sample could not be subdivided
enough to meet the array of measurement and archiving requirements.– If the samples are too big, their total number would be too small to satisfy
minimum requirements for the diversity of the entire collection.
• Based on experience with Lunar and meteorite samples, iMARS has concluded that 10 grams per rock sample is a reasonable compromise.
QUE has been subdivided into over 60 individual samples, and analyzed by multiple laboratories.
QUE-94201
Case History: Martian meteorite QUE-94201 (mass = 12.02 g)
Image courtesy Kevin Righter

15
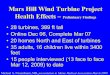
Model of Minimum Number and Mass of Samples
Number
Sample TypeMechanical Properties
Proposed science
floor
Mass/ sample
(gm)
Total sample
mass (gm)
Sedimentary suite rockHydrothermal suite rock
Low-T W/R suite rockIgneous suite rock
Other rockLander-based sample rock or reg. 4 20 80
Regolith granular 4 15 60Dust granular 1 5 5Ice ice or liquid 0
Atmospheric Gas gas 1 0.001Cache from previous
mission rocks 0
TOTAL (min.) 30 345
Mass
20 10 200

16
Sample Preservation, Integrity, and Labeling
• Integrity of the samples must be preserved
• Samples must be labelled (to link to field context)
• Retain pristine nature of samples prior to arrival on Earth (including temp.)
• Samples would require secure and appropriate packaging to ensure that samples do not become mixed or contaminated
Impact test, June 8, 2000 (max. dynamic load ~ 3400 g, avg. ~2290 g). 10 samples of basalt and chalk in separate sample cache tubes with tight-fitting Teflon caps. Many of the teflon caps came off as a result of the impact.
UNACCEPTABLE
UNACCEPTABLEACCEPTABLE
Rock sample pulverizedSamples
mixed
Rock fractured
Images courtesy Joy Crisp

17
Science Strategy and Implementation
Monica Grady

18
Sampling Strategy
• Achieving the scientific objectives of MSR would be critically dependent on the samples collected– Sample collection mechanism must be able to:
• reach specified samples• collect different types of material
– rock samples, granular materials (regolith, dust) and atmospheric sample(s)
– single cores to depths of ~5 cm below the surface
– Would require mobility, moving from landing site to sampling site(s)• Ability to rove beyond its landing site, carry out a sample-acquisition traverse,
and return to the lander
• Rover must be able to visit multiple locations within a single landing site
Opportunity Landing Site

19
Measurement Purpose of Measurement
High quality colour panoramic imaging
•identify samples of interest •determine local geological context
Microscopic imaging •resolution of 10s of microns (or better) •examine rock and sediment textures
Mineralogy •discriminate one rock from another •establish geologic context of the samples
Measurements of elemental abundance
•essential for understanding the range of variability within a field site•identifying the effects of geologic processes.
Reduced carbon measurements
•essential for understanding prebiotic chemistry, habitability, and life•ppm-level sensitivity may be sufficient for screening for sample selection on Mars
Rock Abrasion Tool •essential for characterizing the rocks •many rocks have dusty or weathered surfaces
Scientific Sample Selection
• Effective sample selection would require:– sufficient knowledge of characteristics of candidate samples
– field context of the samples
• Several measurements made in situ would aid in identifying samples for collection, and would add value to the collected samples by providing context

20
Sample Types: Rocks
Irvine
Humphrey
Backstay
IGNEOUSSEDIMENTARY
HYDROTHERMAL Elizabeth Mahon:72% SiO2
Melas Chasma
Lowerunit
Middle unit
Upper unitEndurance Crater
Images courtesy Hap McSween, John Grotzinger

21
Sample Acquisition 1: Rock Samples
• In order to maximize the scientific value of rock samples, the rover-based sample acquisition system should be able to:– Take samples from outcrops where the geologic context is well-known,
and also from loose rocks of interest.
– Sample both the weathered exterior and unweathered interior.
– Sample specific sites (e.g. designated beds within a stratigraphic sequence, such as the Burns Cliff at Meridiani Planum).
– Deliver samples of an appropriate size and form
• Sampling– A “mini-corer” capable of accessing
unweathered terrains and acquiring small samples.
• Current estimate of minimum required depth is ~5 cm (TBC)
RAT on Opportunity
Image courtesy Steve Ruff

22
Sample Types: Regolith
Most patches of disturbed, bright soil in Gusev are rich in sulfur, but this one has very little sulfur and is about 90 percent silica.
Soil target "Gertrude Weise“, Spirit, March 29, 2007; sol 1187
Spirit, 01-12-06; sol 721
Soil with a salty chemistry dominated by iron-bearing sulfates. These salts may record the past presence of water.
Basaltic sand
Soil target “El Dorado“, Spirit
“Ordinary” regolith
Sol114A_P2561_1_True_RAD.jpg
Images courtesy Steve Ruff and Oded Aharonson

23
Sol589A_P2559_1_False_L257.jpg
Sample Acquisition: Regolith and Dust
• Regolith/dust samples– Need an effective way to
collect granular materials (e.g., scoop)
For Opportunity, the estimated net dust thickness after one year was 1 to 10 microns (reflects both additions and removal).
False-color Pancam image that shows thin dust drifts at the top of Husband Hill.
Image courtesy Steve Ruff

24
Sample Acquisition: Atmosphere
• Atmospheric gas sample sufficient gas for robust analyses– Gas sample must be isolated from the rock, regolith, and dust
samples
– Minimum ~ 10 cm3 at a pressure of 0.5 bar (probably requires compression of gas sample)
JSC gas analysis lab (Image courtesy Don Bogard)
Gas Analysis Sample Container (GASC) used on Apollo 11 and 12 to sample lunar atmospheric gases.

25
MSR Landing Site Selection
• The choice of landing site would play a critical role in determining which of these objectives, and the level of detail, could be supported.
• We need to start preparing for landing site selection now, while valuable orbital assets are functional.
• Trade-off between ease of access and scientific value
• ±30° latitude would allow for a wide variety of targets
• Special regions judged not to be necessary to achieve minimum acceptable science.
Nili Fossae Trough
Image courtesy Scott Murchie

26
Science Management Plan
Monica Grady

27
EXAMPLE SCIENCE DECISION: Sub-division and allocations for part of Mars meteorite QUE-94201
Planning for Sample Science
• A significant challenge for an international MSR would be the process by which a large, diverse, international science team would be managed
• How would international participation in the following critical science-related decisions be managed?– where to land, – which samples to collect, – Mars surface operations strategy, and its
relationship to risk management – subdivision of the samples once back on
Earth– allocation of the samples
• Would require an international ‘oversight body’ that includes– international and technical diversity– budget decision-makers– scientists, engineers, strategic planners, and managers
• Proposal for International MSR Science Institute (IMSI)

28
Proposed MSR Science Process Roadmap
19 20 21 22 23 24 2509 10 11 12 13 14 15 16 17 18Lander Launch
MAV launch
Earth Arrival
Sci
ence
Strategic guidance, oversightIMSI
SRF Ground breaking
National entities would be involved in curation, instrument development, laboratory upgrades, sample management and analysis technology
POWG
Public Outreach
Landing Site selection and certificationLSWG
Surface Operations and sample selection SOWG
Sample Science, Preliminary examination SSWG
Curation transition/operations CWG
AOSelection
PIs
MSASCSample allocation
SRF Site(s) selection

29
DISCUSSION

30
Draft High-Level Requirements
Lisa May

31
Draft High-Level Requirements
Category Requirement
Sample types to meet science objectives
MSR would have the capability to collect samples of rock, granular materials (regolith, dust) and atmospheric gas
Sample mass MSR would return a minimum of 500 g of sample mass
Sampling redundancy including contingency samples at landing site
MSR would have both a rover-based sampling system and a lander-based sampling system
Sample encapsulation MSR would have the capability to encapsulate each sample in an airtight container to retain volatile components of solid samples with the associated solid samples and protect samples from commingling
Cache retrieval If Mars Science Laboratory (MSL) ends its mission in an accessible location with a cached sample on board, MSR should be designed to have the capability to recover the cache(s)

32
Category Requirement
Horizontal mobility to acquire diverse samples needed to meet science objectives
In order to sample various geological sites, MSR would have the ability to rove to the edge of its landing error ellipse (“go-to” capability), carry out a 2.5 km sample acquisition traverse, then return to the lander.
Landing site latitude range MSR would be able to access landing sites within +/- 30 deg latitude
Planetary protection All MSR flight and ground elements would meet the planetary protection requirements established by COSPAR; an MSR mission is classified as category V, restricted Earth return
International cooperation MSR mission planning would enable international cooperation
Timing The launch of Lander Composite would be no later than 2020.
Draft High-Level Requirements (Cont’d)

33
Reference MSR Architecture
Alain Pradier

34
Proposed Reference MSR Architecture
SEVERAL KEY FACTORS SET THE FOUNDATIONS OF THE PROPOSED MSR ARCHITECTURE
• No direct return to Earth from Mars surface – must split flight mission at some point
creating 2 flight elements
• Current launcher capability– 1 launch of both flight elements not currently possible
2 launchers
• Mass domino effect– Two key elements, Earth return capsule and Mars ascent vehicle, lie at
the end of long delta-V chains
the masses of these elements are critical drivers of the overall mission
1
2
split

35
Proposed MSR Architecture - Launch
Mars Surface
Mars Atmosphere
Mars Orbit
Earth Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate) Control & Mission Centres
and Stations
Launch & Transfer

36
Proposed MSR Architecture - Arrival
Mars Surface
Mars Atmosphere
Mars Orbit
Earth Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate) Control & Mission Centres
and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Entry, Descent & Landing
Orbiter Aerobraking(NASA-MRO shown)

37
Proposed MSR Architecture - Surface
Mars Surface
Mars Atmosphere
Mars Orbit
Earth
Control & Mission Centres and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Surface Sampling
Operations
Mars Ascent Vehicle Launch
Mars Ascent Vehicle
Mars Sampling Rover
Mars Lander
Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate)

38
Proposed MSR Architecture - Return
Mars Surface
Mars Atmosphere
Mars Orbit
Earth Lander Composite
Atlas A 551
OrbiterComposite
Ariane 5 ECAControl & Mission Centres
and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Sample Container
Mars Ascent Vehicle
Mars Sampling Rover
Mars Lander
Orbiter Captures Sample Container
Sample Receiving and Curation Facilities
Expended Propulsion Module
Diverted ERVEarth Return Vehicle
Earth Return & Deflection of Return Vehicle
Rendezvous & Sample Container Capture
Expended MAV

39
Proposed MSR Architecture– Earth Entry & Recovery
Mars Surface
Mars Atmosphere
Mars Orbit
Earth
Control & Mission Centres and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Sample Container
Mars Ascent Vehicle
Mars Sampling Rover
Mars Lander
Expended MAV
Orbiter Captures Sample Container
Sample Receiving and Curation Facilities
Expended Propulsion Module
Diverted ERVEarth Return Vehicle
Earth Entry Vehicle
High Speed Earth Entry
Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate)

40
Mission Analysis
Frank Jordan

41
Sample Return Mission Studies Background
• 1998-1999 Partnership: NASA, CNES, ASI for mission launch in 2003-2005
• 2000-2006 NASA studies with U.S. industry
• 2003-2007 ESA studies with European industry
• 2007-2008 IMARS study
iMARS study has built on the past studies and has reached a consensus on reference mission design features

42
Mission Design Issues / Design Assumptions
Number of flight elementsAt least two:
• Orbiter / Earth Return 3500 – 4000 kg• Lander / Mars Ascent 4300 – 4800 kg
Reference launch vehiclesLander – U.S. Atlas V 551Orbiter – Europe Ariane 5 ECA
Sequence of flights Orbiter, then Lander / Lander, then Orbiter/ same opportunity
Earth-to-Mars / Mars-to-Earth trajectories
Direct flights (transit times less than a year) for lander. Orbiter may need Earth swingby with transit times more than a year.
Lander atmosphere entry Direct from transit trajectory
Orbiter achievement of Mars orbitPropulsive ∆V to high Mars orbit, aerobraking to low Mars orbit, propulsion staging
Sample collection on surfaceAccurate landing for ease of mobility to compelling sample sites
Rover with site characterization instruments and coringLander-based sampling system
Sample return to orbiter Mars ascent vehicle and rendezvous/capture in orbit
Sample return from Mars orbit to Earth’s surface
Propulsive ∆V to Earth-vicinity transit trajectory
Surface landing

43
Analysis of MSR Mission Options (Lander TC from MSR
orbiter)
Lander launched in 2022
Lander composite launched in 2020
Abbreviations:
A/b: aerobraking; DT: Direct Transfer (no Earth swing-by); RdV: Rendezvous and Capture; IFO: In-flight operations.

44
Analysis of MSR Mission Options (Lander TC from
another mission)
Lander launched in 2020, before the Orbiter composite
Lander composite launched in 2018, before the Orbiter composite
Lander launched in 2020, after the Orbiter composite
The one considered later on

45
Landing Accuracy (1 of 2)
• Entry System
• Parachute
• Propulsive descent system

46
Landing Accuracy (2 of 2)
Capabilities vs concepts
Unguided (MER, Phoenix, Exomars):
# 50 km radius
MSL 2009 SystemTriggers chute deployment on speed
~3km
Ignition
Chute Deploy
Parachute Phase
Pwred Desc (Gravity Turn)
Entry Phase
Ballistic guided entry phase (MSL):
# 10 km radius
~ 3km
Ignition
Chute Deploy
Entry Phase
Chute Phase
Pwred Desc(Gravity Turn)
Improved accuracy, triggers chute Deploymemt on position
Ballistic guided entry phase and optimised
parachute opening (enhanced MSL):
# 3 km radius

47
Holden Crater: Candidate MSL Site
Sampling Strategy Impact on Science
MSL
MSR
Area of Sampling Interest

48
Surface Exploration for “Go To” Sites
Lander & MAV
A: Petal architecture• 700 sols
B: Linear architecture• 385 sols
A
B
500m Science suites(5 cores per suite)
Cores
Landing accuracy, 0 to 3kmsemi-major axis of the landing ellipse
Smooth terrain100 m/sol traverse
Rough terrain35 m/sol traverse
50m

49
Protecting the Earth, Mars, and the SamplesGerhard Kminek

50
Planetary Protection Policy
Preserve planetary conditions for future biological exploration– avoid forward contamination
To protect Earth and its biosphere from potential harmful extraterrestrial sources of biological contamination
– avoid backward contamination

51
Avoid Forward Contamination of Mars
– Numerical bioburden limits exist in international policy and national implementation requirements
– Size and complexity of the MSR flight system might require “terminal sterilization” prior to launch
– Even if a terminal system-level sterilization of the flight system were not necessary to meet the planetary protection requirements, general bioburden and (re)contamination control would affect the material and process selection, design, model philosophy and qualification program to a greater extent than a traditional one-way mission to Mars
1996 Mars Pathfinder 2007 Phoenix
1975 Viking
2003 Beagle II

52
Planetary Protection Policy
Preserve planetary conditions for future biological exploration– avoid forward contamination
Protect Earth and its biosphere from potential harmful extraterrestrial sources of biological contamination
– avoid backward contamination

53
Avoid Back Contamination of Earth
– Requires breaking the chain of contact
• After samples are contained, engineering design and mission operation must break
the chain of contact between Mars and the Earth
• This has to be taken into account for the interface design between flight elements
• End-to-end risk assessment to release martian material into the Earth environment
– Requires highly reliable sample containment throughout all mission phases,
including
• Earth entry and landing
• Transport of the returned hardware and samples to an SRF
• Throughout operations carried out in the SRF until declared safe for release
– Numerical requirements exist in draft form
• Review, approval and release of these requirements is necessary to support
further planning

54
Planetary Protection vs Mission Elements
Mars Surface
Mars Atmosphere
Mars Orbit
Earth
Control & Mission Centres and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Sample Container
Mars Ascent Vehicle
Mars Sampling Rover
Mars Lander
Expended MAV
Orbiter Captures Sample Container
Sample Receiving and Curation Facilities
Expended Propulsion Module
Diverted ERVEarth Return Vehicle
Earth Entry Vehicle
Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate)

55
Sample Receiving Facility
Has to provide containment and preservation of returned flight hardware & samples
– containment equivalent to BSL-4– protect samples from Earth contamination
Has to allow execution of planetary protection protocol– preliminary characterization and subsampling– biohazard assessment and life detection
– Robotic systems might be a good choice as an integral part of the sample handling chain
– A capability to decontaminate flight hardware, equipment used in the high-containment zone, and the samples must be provided
– Potential international character of SRF management – Because of the public visibility and sensitivity related to the SRF
public involvement and communication is of great importance– SRF site should be in proximity to a relevant research
environment– Site selection and approval process with legal authorities could
take several yearsWinnipeg, Canada
Health Protection Agency, UK

56
Sample Curation Facility
–Has to provide physical security for the samples
–Proper curation of martian samples brought to Earth by spacecraft would require one or more dedicated laboratories and associated staff
–Could be stand-alone or dedicated curation laboratories associate with the SRF(s)
–Stringent requirements for sample storage
and handling
–Dividing sample sets might improve overall
sample security and take advantage of
specific international expertise
Apollo sample handling, JSC

57
Planetary Protection Summary
• Planetary protection is about safe solar system exploration and
preservation of our investment in scientific exploration• Protecting the martian samples from terrestrial contamination throughout
all mission phases & breaking the chain between Mars and Earth would
introduce considerable complexity in the mission design for MSR• contamination control on sub-system and system level is beyond
one-way missions• The sample receiving facility would be a long lead item that has to be
addressed in the pre-project phase• full development, approval and commissioning would cover one
decade• Ground facilities (i.e., containment and curation) would of necessity be
long-term investments• Communication with the public of particular importance with respect to
the sample containment facility

58

59
Flight and Ground System Summary
Denis Moura

60
MSR Baseline Architecture
Mars Surface
Mars Atmosphere
Mars Orbit
Earth Lander Composite
Atlas A 551(candidate)
OrbiterComposite
Ariane 5 ECA(candidate)
Control & Mission Centres and Stations
Mars Cruise Stage
Entry & Descent Stage, Direct Entry
Orbiter(Aerobraking)
Sample Container
Mars Ascent Vehicle
Mars Sampling Rover
Mars Lander
Expended MAV
Orbiter Captures Sample Container
Sample Receiving and Curation Facilities
Expended Propulsion Module
Diverted ERVEarth Return Vehicle
Earth Entry Vehicle

61
Baseline Composite 1
(landing parts + associated carrier)
a
b
cgc
h e df
Building blocks Functional description Tech. Development need
b) Lander (including EDL)
• Carries landed systems including rover, MAV, and
sample container to the surface of Mars
• Provides landing within accuracy requirements
• Carries contingency sample collection and
containment system
• Sample collection and
containment system,
• Precision landing
• Sample transfer system
a) Mars Cruise Stage• Carries the Lander from launch to its entry point in
the Mars atmosphereNone
c) Rover
• Mobile system to acquire samples • Carries instruments and tools • Carries sample collection and containment system• Transfers samples to Lander
• Sample collection and
containment system
• Sample transfer system
d) Rover Payload • Characterizes the sample site and sample targets None
e) Rover Sample
Acquisition System
• Includes tools to acquire samples of soil, rock,
regolith, and atmosphere
• Puts samples into encapsulation system
• Coring tools
• Other sample-acquisition tools
Part 1

62
Baseline Composite 1
(landing parts + associated carrier)
a
b
cgc
h e df
Part 2
Building blocks Functional description Tech. Development need
f) Lander Sample
Acquisition System
• Carries tools to acquire, at a minimum, soil and
atmosphere samples, possible subsurface sample
acquisition.
• Carries sample encapsulation system
• Transfers samples to Sample Container
• Sampling tools, sample
transfer system
• Possible 2 - 3 m drill
g) Mars Ascent Vehicle
(MAV)
• Carries sample container to Mars surface on
Lander
• Launches sample container into Mars
rendezvous orbit
• Propellant and materials for
long-duration storage and
performance in Mars environment
• Launch from low mass landed
platform
• Low mass avionics
h) Sample Container
• Arrives at surface of Mars empty
• Is filled by rover and/or lander sample transfer
system
• Is launched by MAV
• Orbital detection
• Reliable containment
• Low mass
• Cleanliness

63
Building blocks Functional description Tech. Development need
a) Orbiter
• Performs data relay with the Lander and
rover from Mars orbit
• Carries rendezvous and capture system and
Earth return vehicle with Earth Entry Vehicle
• Captures sample container in Mars orbit
• Releases ERV/EEV with the Lander and the
rover
• Autonomous rendezvous in
Mars orbit (sensors, GNC,
algorithms and operations)
• Sample thermal protection• End-to-end system: no entry
ever done from Mars
c) Earth Entry Vehicle
(EEV)
• Is carried by the ERV• Re-enters Earth’s atmosphere and lands
with samples returned from Mars
b) Earth Return Vehicle
(ERV)
• Carries and released the EEV.
• Diverts to a non-Earth impact trajectory
from Mars orbit
None
Baseline Composite 2 (orbiting & return parts)
e
a b
d
f c
Part 1

64
Baseline Composite 2 (orbiting & return parts)
e
a b
d
f c
Part 2
Building blocks Functional description Tech. Development need
d) Propulsion Module
• Provides propulsion/fuel to reach Mars
and insert into orbit
• Perform rendezvous manoevers and
propels the ERV from Mars orbit
None
e) Rendezvous &
Capture System
• Detects and captures the sample container
in Mars orbit
• Low light detection
• Autonomy
f) Sample containment
& verification
• Seals sample container and verifies flight
containment on return trip
• Robust sealing and
containment verification
technologies

65
iMARS Proposed Ground Segment
Building blocks Functional description Tech. Development need
Sample Receiving Facility(ies) (SRF)
• Provides containment and contamination
control for returned samples
• Contains all means for cataloguing
samples and conducting PP protocols
• Sample handling in containment
with strict contamination control
• Optimized PP test protocol
Curation Facility(ies) (CF)
• Provides for documentation, storage, and
distribution of samples once it has been
deterimined that the samples harbor no life or threat
to human health or the environment
• May be collocated with SRF(s)
None
Science Support
• Participates in requirements development,
landing site selection, sample selection and
science analysis of returned samples
• Evaluates extended mission opportunities
None
Mission Ops Centers(Orbiter & Rover)
• Performs mission operations by commanding
and controlling the Orbiter and lander compositesNone
Research Laboratories • Scientific measurements on the return samples None, unless sample cannot be declared as non hasardous

66
DISCUSSION

67
Development Timeline
Denis Moura

68
Proposed Development Timeline
• An MSR mission realized within an international framework would
face difficulty in coordination and synchronization between the Orbiter
and Lander Composite engineering and development activities.
• In addition, two options might be defined based on the availability (or
not) of telecommunication support from another orbiter mission in
place during the Lander Composite’s arrival at Mars.
• In addition, it is recognized that approval and development of the
Sample Receiving Facility/ies would also be complex and long.
• The iMARS working group has thus defined the following possible
tentative development plans.

69
MSR Potential Timeline
Mission analysis scenario 5 (lander TC support from another mission)

70
Associated Technology Maturation Plan

71
Investment Plan
Lisa May

72
Near-term Investment
• MSR mission costs estimated from $4.5B–$8B or B€3–B€5.3
• Rough-order-of-magnitude estimate based on – Past MSR studies– Actual cost data from recent Mars missions (Mars Exploration Rovers, MSL,
ExoMars)
• Require further development of a reliable estimate – End-to-end costs and funding requirements for an international MSR– Depends on final architecture, participants, and partnership structure
• Nations, agencies, and institutions could start to plan participation – Near-term investment would be based on long-lead technologies and associated with
building blocks – Technologies must be proven in a relevant environment prior to the applicable PDR
dates • TRL 6: System/subsystem model or prototype demonstration in a relevant environment
(ground or space)
– Requires early investment and invites parallel development.

73
Building Blocks with Near-Term Technology Needs (1 of 2)
Proposed Orbiter Composite 2019 launch
TRL 6 need date early CY 2015
Earth Entry Vehicle (EEV) Sample thermal protection
End-to-end system tests
Rendezvous & Capture System Low-light detection
Autonomy
Sample Containment and Verification Robust verification technologies for sealing and containment
Proposed Lander Composite 2020 launch
TRL 6 need date late CY 2015
Lander, including EDL Precision landing
Hazard avoidance
Sample transfer system
Forward planetary protection
Rover Mobility and autonomy
Sample encapsulation and transfer system
Sample Acquisition: Rover Coring tools
Sample Acquisition: Lander Sampling tools
Sample encapsulation and transfer system

74
Building Blocks w Near-Term Technology Needs (2 of 2)
Proposed Ground Facilities
TRL 6 need by CY 2013
Ground Recovery and Transport
Safe transportation technology
Sample Receiving Facility(ies) (SRF)
Sample handling in containment with strict contamination control
Proposed Lander Composite (cont’d) 2020 launch
TRL 6 need date late CY 2015
Mars Ascent Vehicle (MAV) Propellant and materials for long-duration storage and performance in Mars environment
Launch from low-mass landed platform
Sample Container Orbital detection
Reliable containment

75
Summary, Conclusions, Next Steps
David Beaty

76
Summary of Primary Conclusions
1. The first MSR mission would make a significant contribution to many
fundamental scientific questions.
• Scientific return would depend on the character, diversity, and quality of the
samples returned.
2. Critical technologies would need new development
• Require substantial effort in the short/medium terms to reach a correct
maturity level in the early phases of the project.
3. Planetary protection challenges for an MSR mission would be beyond
those encountered for one-way Mars missions. There would be some
significant technological planetary protection challenges, including
aseptic sample transfer, redundant containment of the flight system, and
biohazard assessment after the samples return to Earth.
4. Implementation of planetary protection and contamination control
requirements for the end-to-end mission system is critical

77
Summary of Primary Conclusions
5. Existing launch capabilities in NASA and ESA would be sufficient
• Two launch vehicles would be mandatory
• Other systems in development, especially for ExoMars and MSL, could
be used for MSR
6. MSR could be divided into separate elements to be considered for
funding by different international entities
• “Who does what?” is not something iMARS could resolve on its own
7. With adequate resources and responsive decision making, the first
MSR mission could be started in ~ 2013 (phase B start)
– Would launches around 2020
– Receiving a sample back on Earth ~3 years later

78
Forward Planning—Organizational
• Organize into three subteams– Engineering
– Science (re-form, using a Nominating Committee)
– Earth Operations
• Specific recommendations have been made for each of the above three subteams
• Planetary Protection Officers as ex officio—carefully manage the boundary between setting of policy and implementation of policy

79
Forward Planning—General
• Request IMEWG approval of iMARS Phase II, up to start of Phase 0• General objectives:
– Consolidate current basics such as high-level requirements and the reference architecture
• Respond to details regarding international aspects of this mission when known
– Refine science and engineering sensitivities• Assess trade-offs between cost and value to optimize the flight, Earth, and on-
Mars systems
– Improve confidence in current cost estimates
– Define mechanism to engage potential participants and to assess degree of interest and appropriateness of technical capabilities
• Further understanding of mission components that different financial and implementation entities could take on
• Clarify interfaces between these components and establish processes for interface management
– Identify candidate, common approaches to managing the risks associated with an international MSR mission

80
Forward Planning—Engineering Subteam
• Further define building blocks and functional requirements– Refine mass, performance, and other requirements
– Depends on independent efforts of MSR participants
• Further analyze the planetary protection and contamination control implementation options/requirements
• Iterate on surface operations strategies in conjunction with mission and system studies
• Consolidate engineering and technology efforts of MSR participants into overall international MSR architecture and requirements– Update technology challenges and needed capabilities (“timeline”,
strategies...)
• Address open issues such as req’t for precursor mission(s), ITAR, organization for Phase 0
• Address relevance to human missions

81
Forward Planning—Science Subteam
• Develop draft Science Management Plan
– Includes IMSI definition/proposal
• Begin landing-site selection process
– Identify dedicated observations with current assets
• Refine open questions re: lander-based sampling system
• Surface operations planning, impact on requirements
• Update contamination requirements
• Address sample measurements and instrument requirements for
Earth-based laboratories

82
Forward Planning—Earth Operations Subteam
• Restructuring subteam from planetary protection
and facilities to Earth Operations
• Focus on requirements definition
– Earth landing site ops
– Earth surface transportation
– SRF functional requirements
– Curation

83
General Discussion
Doug McCuistion, Bruno Gardini
Recommended