PROJECT PRESENTATIONBattery Swapping Reliability
Wesley LavenderEMIS 7305
Presentation Outline• Overview
• Scope• Problem
• Analysis• Overview• Industrial Robots Performing Swap• Charging Stations
• Results• Conclusions• Questions
Overview
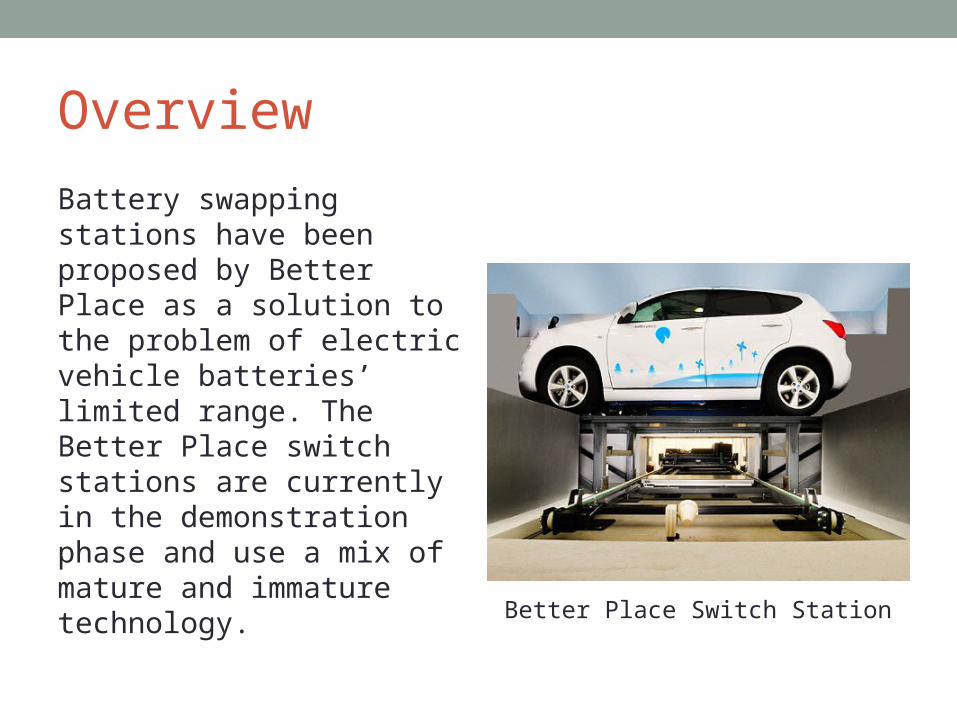
Battery swapping stations have been proposed by Better Place as a solution to the problem of electric vehicle batteries’ limited range. The Better Place switch stations are currently in the demonstration phase and use a mix of mature and immature technology. Better Place Switch Station
Scope• Original Scope:
• Reliability, Maintainability, Supportability• Analyzing the battery identification process, battery swapping
process, and the charging of depleted batteries
• Refined Scope:• Reliability only• Analyze battery swapping process (including the clamping
mechanism, the retrieving mechanism, and the moving tray) and charging stations
Problem• Battery swapping is new and immature• Little testing completed on reliability of battery swapping
systems• Complex system with a lot of moving parts
ANALYSISOverview, Industrial Robots Performing Swap, and Charging Stations
Overview• Selected Model: Exponential
• commonly used for electronic equipment • constant failure rate model• used in analyzing the ‘useful life’ period of an item’s life
• Failure rates and MTBFs used were measured during testing
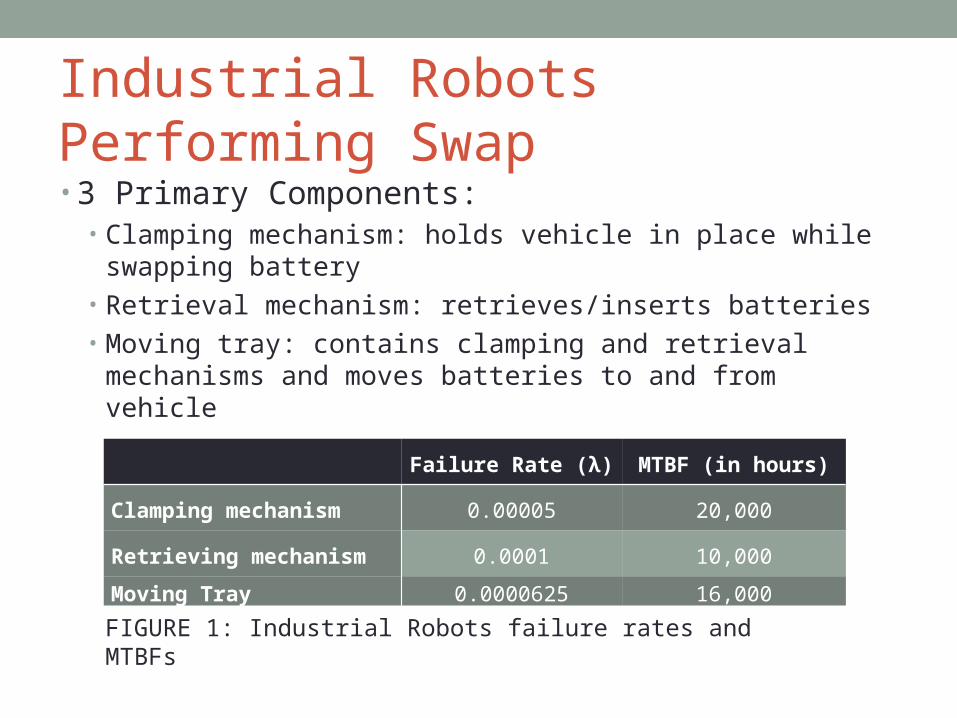
Industrial Robots Performing Swap• 3 Primary Components:
• Clamping mechanism: holds vehicle in place while swapping battery
• Retrieval mechanism: retrieves/inserts batteries• Moving tray: contains clamping and retrieval mechanisms and
moves batteries to and from vehicle
Failure Rate (λ) MTBF (in hours)
Clamping mechanism 0.00005 20,000
Retrieving mechanism 0.0001 10,000
Moving Tray 0.0000625 16,000
FIGURE 1: Industrial Robots failure rates and MTBFs
Industrial Robots Performing Swap
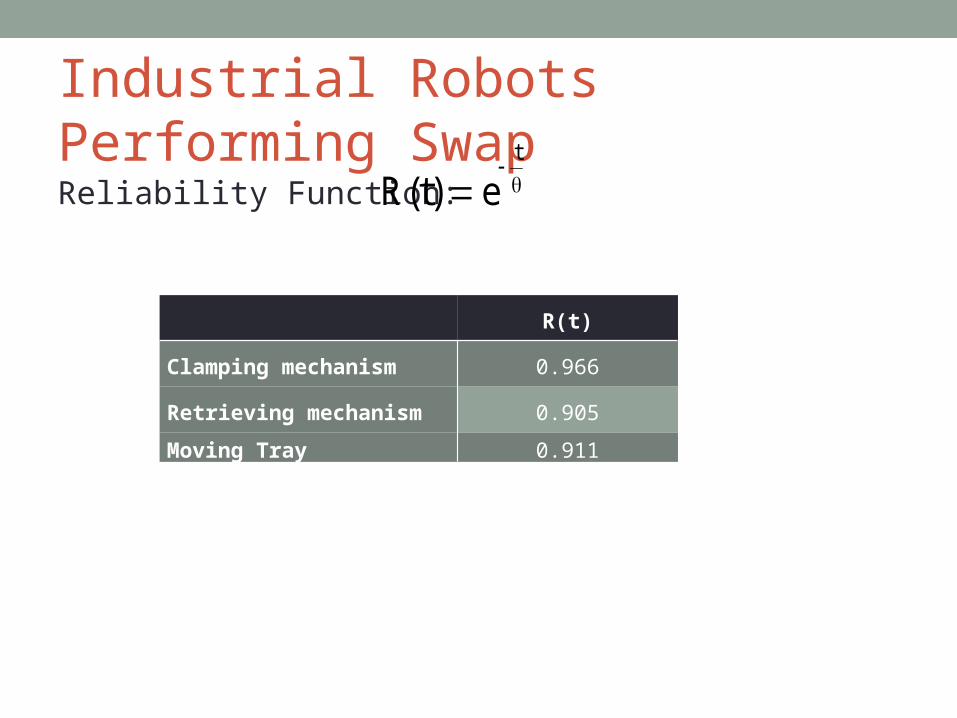
Reliability Function:
t
e )t(R
R(t)
Clamping mechanism 0.966
Retrieving mechanism 0.905
Moving Tray 0.911
Industrial Robots Performing Swap
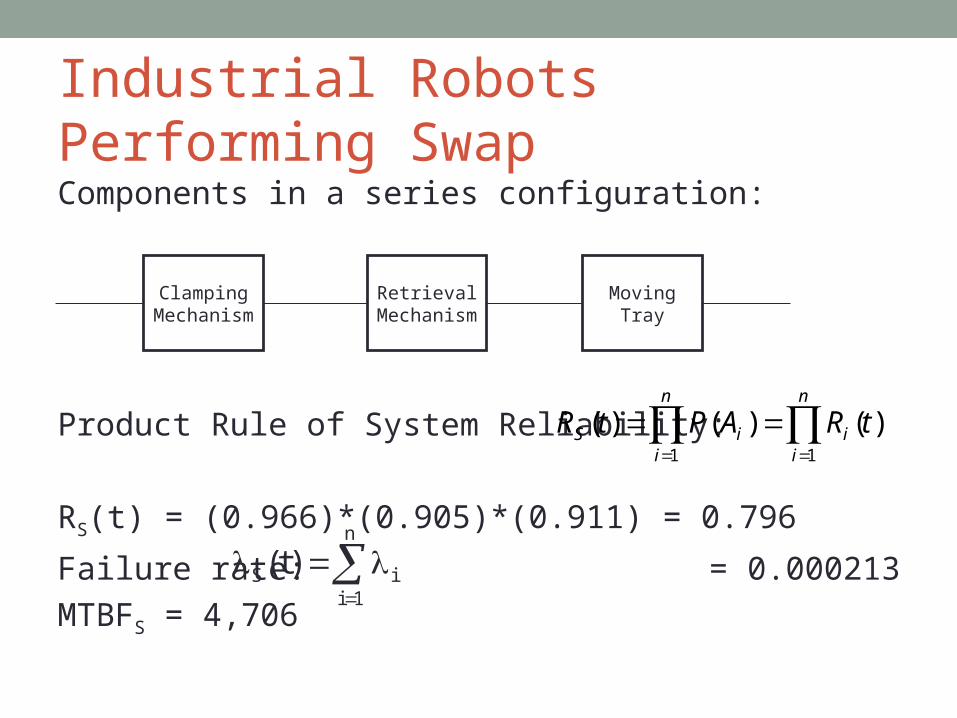
Components in a series configuration:
Product Rule of System Reliability:
RS(t) = (0.966)*(0.905)*(0.911) = 0.796
Failure rate: = 0.000213
MTBFS = 4,706
n
ii
n
iiS tRAPtR
11
)()()(
Clamping Mechanism
Retrieval Mechanism
Moving Tray
n
1iiS )t(
Charging Stations
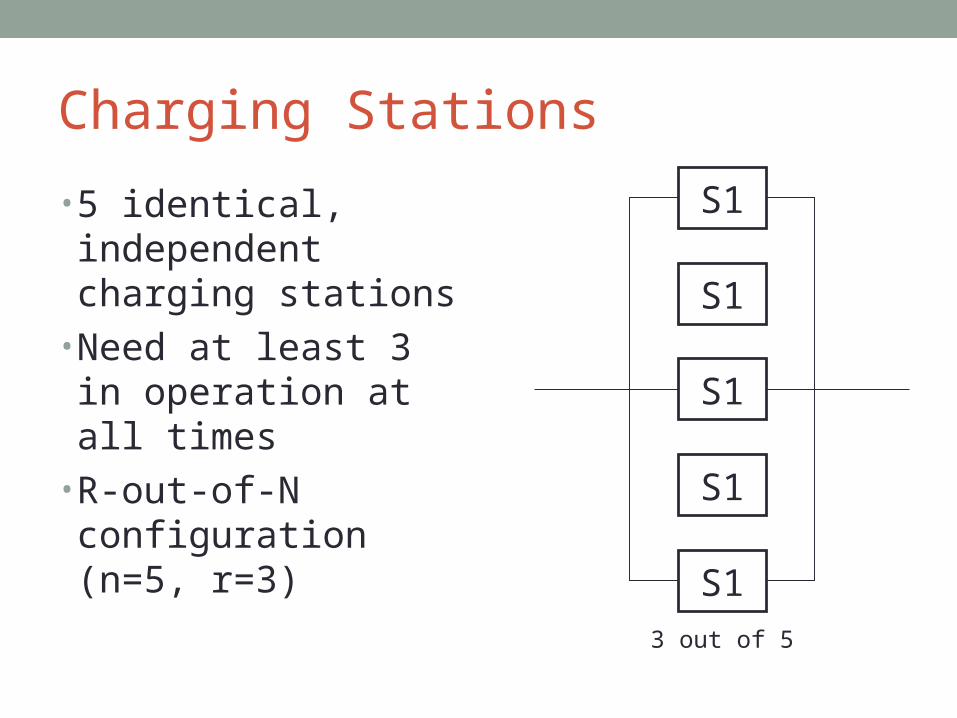
• 5 identical, independent charging stations
• Need at least 3 in operation at all times
• R-out-of-N configuration (n=5, r=3)
S1
S1
S1
S1
S1
3 out of 5
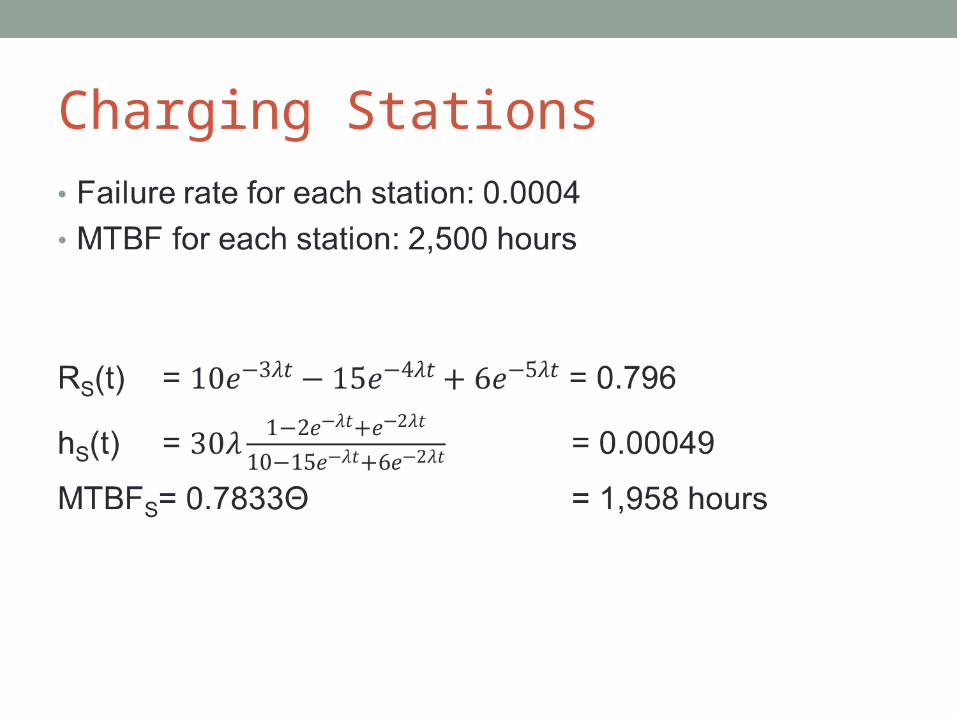
Charging Stations
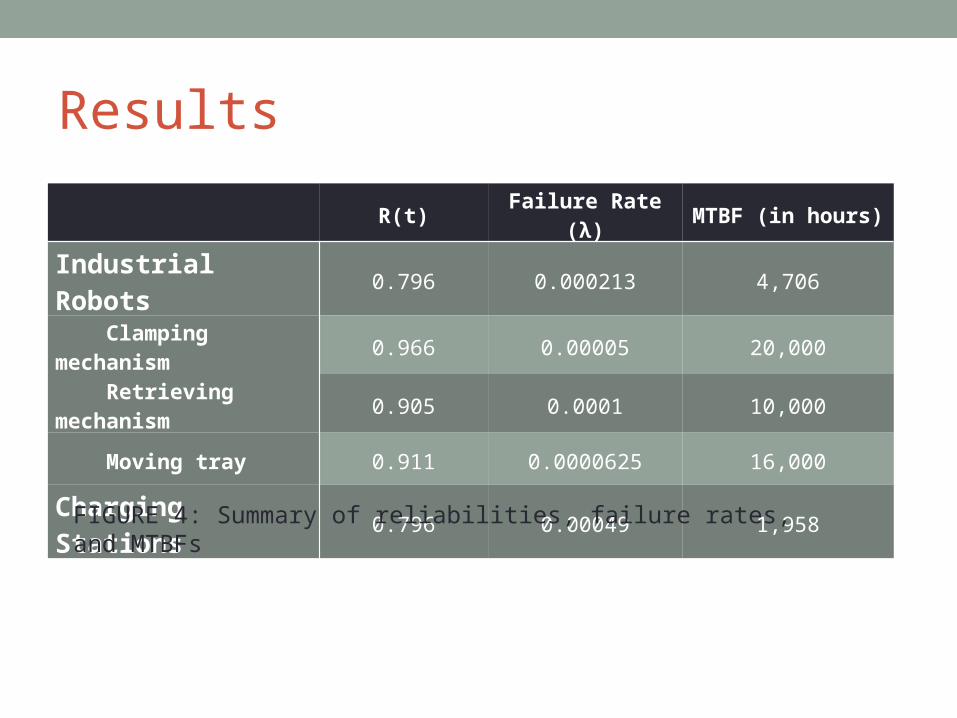
Results
R(t) Failure Rate (λ) MTBF (in hours)
Industrial Robots 0.796 0.000213 4,706
Clamping mechanism 0.966 0.00005 20,000
Retrieving mechanism 0.905 0.0001 10,000
Moving tray 0.911 0.0000625 16,000
Charging Stations 0.796 0.00049 1,958
FIGURE 4: Summary of reliabilities, failure rates, and MTBFs
Conclusions• Technology too immature for widespread commercial
implementation• Industrial robot system should use redundancy to improve
reliability• Charging stations should improve reliability of individual
stations to improve overall reliability
Questions?
References:
"Better Place." Wikipedia. Wikipedia Foundation, Inc., 07APR2012.
Better Place official website. www.betterplace.com.
EMIS 7305 class notes.
Recommended

















