Hindawi Publishing CorporationInternational Journal of Distributed Sensor NetworksVolume 2013 Article ID 376931 14 pageshttpdxdoiorg1011552013376931
Research ArticleRadial and Sigmoid Basis Function Neural Networks in WirelessSensor Routing Topology Control in Underground Mine RescueOperation Based on Particle Swarm Optimization
Mary Opokua Ansong12 Hong-Xing Yao13 and Jun Steed Huang4
1 Institute of System Engineering Faculty of Science Jiangsu University 301 Xuefu Zhenjiang 212013 China2Department of Computer Science Faculty of Applied Science Kumasi Polytechnic PO Box 854 Kumasi Ghana3 College of Finance and Economics Jiangsu University 301 Xuefu Zhenjiang 212013 China4Computer Science and Technology School of Computer Science and Telecommunication Jiangsu University301 Xuefu Zhenjiang 212013 China
Correspondence should be addressed to Hong-Xing Yao hxyaoujseducn
Received 18 April 2013 Revised 5 July 2013 Accepted 19 July 2013
Academic Editor Shuai Li
Copyright copy 2013 Mary Opokua Ansong et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Theperformance of a proposed compact radial basis functionwas comparedwith the sigmoid basis function and the gaussian-radialbasis function neural networks in 3D wireless sensor routing topology control in underground mine rescue operation Optimisederrors among other parameters were examined in addition to scalability and time efficiency To make the routing path efficientin emergency situations the sensor sequence and deployment as well as transmission range were carefully considered In times ofdanger and unsafe situations data-mule robot withThroughTheEarth (TTE) radio would be used to carry water food equipmentsand so forth to miners underground and return with information Using Matlab the optimised vectors with high survival rate andfault tolerant based on rock type were generated as inputs for the neural networks Particle swarm optimisation with adaptivemutationwas used to train the neurons Computer simulation results showed that the neural network learning algorithmminimizedthe error between the neural network output and the desired output such that final error values were either the same as the errorgoal or less than the error goal Thus the proposed algorithm shows high reliability and superior performance
1 Introduction
There were massive mining incidences in 2002 according tothe editorial team of disaster prevention and managementreport disclosing an alarming rate of fatalities globally [1]Mining methods in recent years have been greatly improveddue to the provision of electronic monitoring of hazardousgas and provision of ventilation as well as safety lamps None-theless there are still significant mining risks such as flood-ing fall of ground underground fires handling and use ofcyanide storage of and exposure to radiation materials andother airborne pollution that need to be addressed Thesehave been responsible for a continuing series of environmen-tal and health disasters which cause great human tragediesand loss of life and undermine social or economic stabilityand sustainability [2ndash5] Mining remains one of the most
hazardous environmental occupations worldwide withunderground coal and goldmines characterized by high acci-dent rates even in relatively efficient mining operations [6ndash8] In view of this evacuation procedures and undergroundcommunication infrastructures are expected to be efficienteffective and fault tolerant The critical part of undergroundcommunication infrastructure is to reduce the response timeand fatalities in emergency or evacuation situations andmake human life rescue operations possible [9] This canbe achieved using wireless sensor networks (WSNs) whichhave the capability of monitoring complex phenomenaunderground tunnels underwater surveillance high reso-lution and harsh environments that are otherwise difficultto access [10ndash12] Wireless sensor networks have causedmajor paradigm shift in the area of communication andcomputation It consists of a large number of low-powered
2 International Journal of Distributed Sensor Networks
sensor nodes usually equipped with a wireless transceivera small microcontroller an energy power source andmultitype sensors such as temperature humidity light heatpressure sound and motion [13] The cost and size of thesesensors have decreased with high communication accuracyand capabilities some have energy harvesting features whichcapture and accumulate by-product energy and store it forlater use [14 15] These sensors have made it possible formultihop transmission that conforms to underground tunnelstructure and provides more scalability for communicationsystem construction [16 17]
To this end we model the incident location as a pure ran-dom event and calculate the probability that communicationchain through particular rock layers to the ground is notbroken and let neuron network memorize the complicatedrelationship such that when real accident happens theneural network resident in the robot is used to predict theprobability based on the rock layer he sees instantly If theresult is positive the robot waits to receive the rescue signalotherwise it moves deeper to the next layer and repeats theprocedure
However large-scale networks such as WSN are usuallyassociated with the challenge of scalability that is whetherthe system described will remain effective and reliable [18]with significant increase in nodes or users without havingto increase related time or hardware requirements such asmemory and central processing unit (CPU) To mitigatethis challenge a distributed algorithm is required for par-allel programming which may lead to consensus problemsthat is the inability of the various processes to agree andcommunicate with one another on a single data value Anumber of techniques with application to localization ina distributed routing-free and range-free wireless sensornetworks have been proposed to solve this problem [19ndash21]The topology of a neural network can be recurrent or withfeedback contained in the network from the output backto the input and feed-forward where the data flows fromthe input to the output units with no feedback connectionsArtificial neural networks (ANN) or neural networks (NN)are learning algorithm used to minimize the error betweenthe neural network output and desired output [22] This isimportant where relationships exist between weights withinthe hidden and output layers and among weights of morehidden layers Many researchers have come out with neuralnetwork predictive models in both sigmoid and radial basisfunctionswith applications such as nonlinear transformationextreme learning machine and predicting accuracy in geneclassification [23ndash25] Others focus on distributed estimationcontrol fields to mitigate the execution problems such asmultiple redundant manipulators cooperative task and taskexecution [26 27]
This paper compares the performance of compact radialbasis function (CRBF) with the sigmoid basis function (SBF)and the Gaussian radial basis function (GRBF) neural net-works on wireless sensor routing topology control based onParticle swarmoptimization (PSO) in undergroundmine res-cue operation A scale-free wireless network topology envi-ronmentwas used A significant discovery in the field of com-plex networks has shown that a large number of complex
networks including the internet and worldwide network(www) are scale-free and their connectivity distributions aredescribed by the power law of the form 119875(119896) sim 119896
minus0 [28 29]This power-law distribution falls off more gradually thanan exponential one allowing for a few nodes of very largedegree to exist Even though scale-free networks could bemore disjointed in the event of intentional attacks on theirhubs a random failure would most likely happen on nodeswith low degree of connectivity and therefore not serious onconnectivity
The first section of this paper discusses significant risks inthe mining industry which undermine social and economicstability and sustainability goals as well as loss of life andthe need for a fault tolerant routing topology in emergencyor evacuation situations noting the challenges of scalabilitydistributed algorithm parallel programming and consensusin communication Section two focuses on methods and ourapproach integrating PSO with threshold adaptive mutationin SBF compact RBF and gaussian RBF using mean squareerror for fitness evaluation Section three deals with theresults and discussion with real world application while thelast section concludes the paper
2 Deployment Communication andTransmission Reach
21 Sensor Deployment Topological deployment of sensornodes affects the performance of the routing protocol [30 31]The ratio of communication range to sensing range as wellas the distance between sensor nodes can affect the networktopology In view of this the sensor sequence matrix wasgenerated for the sensors to be deployed such that 119905 = 119905 + 1119894 = 1 119871 119895 = 1 119877 119896 = 1 119862 and node(119905 1) = 119894
node (119905 2) = (
10038171003817100381710038171003817minus (119877 + 1) lowast (1 + (minus1)
tog119869
)10038171003817100381710038171003817
2+ 119895)
node (119905 3) = (
10038171003817100381710038171003817minus (119862 + 1) lowast (1 + (minus1)
tog119870
)10038171003817100381710038171003817
2+ 119896)
(1)
tog119869 = ceil(119905119862119877) and tog119870 = ceil(119905119862) to check the sourcenode and destination node respectively
119878eq = (
(
1 1 1
1 2 1
2 2 1
2 1 1
3 1 1
3 2 1
)
)
(2)
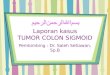
The sequence matrix (119878eq) indicates the positions wheresensors would be deployed and are explained as follows119878eq 119894119895119896 = 1 1 1 for level 1 row 1 column 1 1 2 1 level1 row 2 column 1 and 119894th 119895th 119896th for 119894th level 119895th rowand 119896th column respectively Therefore for a 119879 = 119879 times 119879 inan underground mine with dimensions of 119871 = 5 119877 = 4and 119862 = 3 for depth (level) row (length) and width (col-umn) respectively with 119868-distant apart suggests that 60 sen-sors will have to be deployed (Figure 1) The structure of
International Journal of Distributed Sensor Networks 3
0
1
2
3
4
51 2 3 4 5
6 78
910
1112
131415161718
1920
2122
2324
25262728293031323334353637
3839
4041
4243
444546474849
5051
5253
5455
5657 58 59 60
LevelRowColumn
Sensor deployment chart ( t = xyz = 5 lowast 4 lowast 3)
Figure 1 Positions of deployed sensors for the levels rows and columns
the deployment with diamond square and triangle shapesindicates the node location on each level row and columnrespectively The objective of the deployment is to help savetrapped miners in an emergency evacuation situation
22 Communication and Transmission Reach TheTTE com-munication system transmits voice and data through solidearth rock and concrete and is suitable for challengingunderground environments such as mines tunnels andsubways Figures 2(a)ndash2(c) show the positions of the TTEas laid underground such as vertical-to-surface horizontalbetween levels and horizontal through obstruction respec-tivelyThere were stationary sensor nodes monitoring carbonmonooxide temperature and so forth as well as mobile sen-sors (humans and vehicles) distributed uniformly Both sta-tionary andmobile sensor nodes were connected to either theAccess Point (AP) andor Access Point Heads (AP Heads)based on transmission range requirements The AP Headsserve as cluster leaders and are located in areas where the rockis relatively soft or has relatively better signal penetrationThis will ensure that nodes are able to transmit the informa-tion they receive from APs and sensor nodes The APs areconnected to other APs or Through-The-Earth (TTE) inFigure 3
The TTE is dropped through a drilled hole down 300metres apart based on the rock typeThe depth and rock typedetermine the required number of TTEs needed (Figure 4)Next the data mule is discharged to carry items such as foodwater and equipments to theminers underground and returnwith underground information to rescue team (Figure 5)
Minimizing the transmission range of wireless sensornetworks is vital to the efficient routing of the network This
is because the amount of communication energy that eachsensor consumes is highly related to its transmission range[30ndash32] The node signal reach (SRnode) is defined as theintegration of the change of the minimum and maximumsignal reach taking into consideration the 6 cases of the rockstructure 120573 where 120573 lies between the soft rock (07) and thehardest rock (09) and is given as
SRnode = 119873120575min + int
max
min119873120575119889119903
120573=07le120573le09
(3)
where SRmin and SRmax are minimum and maximum signalreach respectively and each represented as
SRmin =min (119871min (119877 119862))
SRmax =max (119871max (119877 119862))
(4)
The relationship between rock hardness and the signal reachis a complicated nonlinear function which is related to theskin depth of the rock with alternating currents concentratedin the outer region of a conductor (skin depth) by opposinginternal magnetic fields as follows
Skin depth = radic2
(120588 lowast 120596 lowast 120590)(5)
for 120588 is material conductivity 120596 is frequency and 120590 ismagnetic permeability
The signal (119861-field) is attenuated by cube of distance (119889)
119861 = (119896) 1198893
(6)
Signal reach (distance) = 3 lowast skin depth
4 International Journal of Distributed Sensor Networks
(a) Vertical-to-surface (b) Horizontal between levels (c) Horizontal-through-obstruction
Figure 2 TTE-two-way voice and data communication
End start
End end
Surface
Mobile sensor with RFID
APAP head
TTE Stationary sensors
End stop
TTE was being
apartdropped down 300m
Figure 3 Topology structure of stationary and mobile sensors deployed
TTE
Mobile sensor with radio
Drilled hole
Figure 4 TTE radios dropped through drilled hole from surface to underground (300) meters
International Journal of Distributed Sensor Networks 5
Table 1 Common rocks found in typical mines in relation to hardness or softness
Nonlinear mapping Mica Coal Granite Feldspar Quartz MineralSoftness 070 080 083 086 0875 090Hardness 2 3 5 6 7 9Distance 750m 470m 390m 315m 278 78m
Data mule sends food water radiosequipmentsetc to miners and returns with information
Level (L)Row (R)Column (C)
251013
ROW R1 R2 RN
L1L2
Lm
TTEMobile sensor
Datamule
Column C1C2 middot middot middotCq
Figure 5 Data mule sends radios food water and so forth to and from miners and rescue team
Table 1 identifies 6 common rocks found inmines in rela-tion to hardness or softness of each rock
For a connection to be made the absolute difference bet-ween 119894 and 119895 should be less than the node signal reach (SRnode)and is represented as connection
119872C (119894 119895) = 1 if 1003817100381710038171003817119894 minus 1198951003817100381710038171003817 le SRnode otherwise 0
the initial routing matrix (prod
rout) = 119872C
(7)
Multihub wireless networks give rise to distinct challengessuch as limited sensing and communication resources utiliza-tion [33] The routing path has the constraints of maximumpoint to multipoint connection 119872
120588
imposed on it (thereforeeach nodewill connect toAPsAPheads119872
120588
times to generatethe routing path matrix and the routing (prodrout) for thetransmission was given as
prod
rout= 1 if 1003817100381710038171003817119894 minus 119895
1003817100381710038171003817 ge (
119872120588
2) otherwise 0 (8)
for 119894 119895 = 1 119879 119872120588
is the multipoint (even) to allow bidirec-tional communication and 119894 119895 tracks the source and destina-tion nodes respectively Consider
119872C = (
(
1 1 0 0 0 0
1 1 1 0 1 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
119872rout =(
(
1 1 0 0 0 0
1 1 1 0 0 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
(9)
3 Network Fault Tolerant Hardware andSoftware Considerations
31 Network Fault Tolerant Security and managementschemes are critical issues in wireless sensor networks as itsignificantly affects the efficiency of the communication andmany key management schemes had been proposed to mit-igate the constraints [33 34] As stated earlier undergroundmines are characterized with high accident rates which posegreat danger to the communication infrastructure Accidentssuch as fire flooding cave-ins or gases can destroy base sta-tions communication or lighting systems Battery drain andvirus can cause sensors to die invariably creating potentialdanger to miners underground Assuming a third failure rateas (1 minus 120593) affects the routing matrix (119872rout) where 120593 is anyrandom value within 120573 the result would be an explosionmatrix
(prod
120597
) = (1 minus 120593)prod
rout (10)
In assessing the damage and generating the failed matrix(prod
∓
) limits were set to 120582 and 120582 for lower and higher limits
6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Distributed Sensor Networks
sensor nodes usually equipped with a wireless transceivera small microcontroller an energy power source andmultitype sensors such as temperature humidity light heatpressure sound and motion [13] The cost and size of thesesensors have decreased with high communication accuracyand capabilities some have energy harvesting features whichcapture and accumulate by-product energy and store it forlater use [14 15] These sensors have made it possible formultihop transmission that conforms to underground tunnelstructure and provides more scalability for communicationsystem construction [16 17]
To this end we model the incident location as a pure ran-dom event and calculate the probability that communicationchain through particular rock layers to the ground is notbroken and let neuron network memorize the complicatedrelationship such that when real accident happens theneural network resident in the robot is used to predict theprobability based on the rock layer he sees instantly If theresult is positive the robot waits to receive the rescue signalotherwise it moves deeper to the next layer and repeats theprocedure
However large-scale networks such as WSN are usuallyassociated with the challenge of scalability that is whetherthe system described will remain effective and reliable [18]with significant increase in nodes or users without havingto increase related time or hardware requirements such asmemory and central processing unit (CPU) To mitigatethis challenge a distributed algorithm is required for par-allel programming which may lead to consensus problemsthat is the inability of the various processes to agree andcommunicate with one another on a single data value Anumber of techniques with application to localization ina distributed routing-free and range-free wireless sensornetworks have been proposed to solve this problem [19ndash21]The topology of a neural network can be recurrent or withfeedback contained in the network from the output backto the input and feed-forward where the data flows fromthe input to the output units with no feedback connectionsArtificial neural networks (ANN) or neural networks (NN)are learning algorithm used to minimize the error betweenthe neural network output and desired output [22] This isimportant where relationships exist between weights withinthe hidden and output layers and among weights of morehidden layers Many researchers have come out with neuralnetwork predictive models in both sigmoid and radial basisfunctionswith applications such as nonlinear transformationextreme learning machine and predicting accuracy in geneclassification [23ndash25] Others focus on distributed estimationcontrol fields to mitigate the execution problems such asmultiple redundant manipulators cooperative task and taskexecution [26 27]
This paper compares the performance of compact radialbasis function (CRBF) with the sigmoid basis function (SBF)and the Gaussian radial basis function (GRBF) neural net-works on wireless sensor routing topology control based onParticle swarmoptimization (PSO) in undergroundmine res-cue operation A scale-free wireless network topology envi-ronmentwas used A significant discovery in the field of com-plex networks has shown that a large number of complex
networks including the internet and worldwide network(www) are scale-free and their connectivity distributions aredescribed by the power law of the form 119875(119896) sim 119896
minus0 [28 29]This power-law distribution falls off more gradually thanan exponential one allowing for a few nodes of very largedegree to exist Even though scale-free networks could bemore disjointed in the event of intentional attacks on theirhubs a random failure would most likely happen on nodeswith low degree of connectivity and therefore not serious onconnectivity
The first section of this paper discusses significant risks inthe mining industry which undermine social and economicstability and sustainability goals as well as loss of life andthe need for a fault tolerant routing topology in emergencyor evacuation situations noting the challenges of scalabilitydistributed algorithm parallel programming and consensusin communication Section two focuses on methods and ourapproach integrating PSO with threshold adaptive mutationin SBF compact RBF and gaussian RBF using mean squareerror for fitness evaluation Section three deals with theresults and discussion with real world application while thelast section concludes the paper
2 Deployment Communication andTransmission Reach
21 Sensor Deployment Topological deployment of sensornodes affects the performance of the routing protocol [30 31]The ratio of communication range to sensing range as wellas the distance between sensor nodes can affect the networktopology In view of this the sensor sequence matrix wasgenerated for the sensors to be deployed such that 119905 = 119905 + 1119894 = 1 119871 119895 = 1 119877 119896 = 1 119862 and node(119905 1) = 119894
node (119905 2) = (
10038171003817100381710038171003817minus (119877 + 1) lowast (1 + (minus1)
tog119869
)10038171003817100381710038171003817
2+ 119895)
node (119905 3) = (
10038171003817100381710038171003817minus (119862 + 1) lowast (1 + (minus1)
tog119870
)10038171003817100381710038171003817
2+ 119896)
(1)
tog119869 = ceil(119905119862119877) and tog119870 = ceil(119905119862) to check the sourcenode and destination node respectively
119878eq = (
(
1 1 1
1 2 1
2 2 1
2 1 1
3 1 1
3 2 1
)
)
(2)
The sequence matrix (119878eq) indicates the positions wheresensors would be deployed and are explained as follows119878eq 119894119895119896 = 1 1 1 for level 1 row 1 column 1 1 2 1 level1 row 2 column 1 and 119894th 119895th 119896th for 119894th level 119895th rowand 119896th column respectively Therefore for a 119879 = 119879 times 119879 inan underground mine with dimensions of 119871 = 5 119877 = 4and 119862 = 3 for depth (level) row (length) and width (col-umn) respectively with 119868-distant apart suggests that 60 sen-sors will have to be deployed (Figure 1) The structure of
International Journal of Distributed Sensor Networks 3
0
1
2
3
4
51 2 3 4 5
6 78
910
1112
131415161718
1920
2122
2324
25262728293031323334353637
3839
4041
4243
444546474849
5051
5253
5455
5657 58 59 60
LevelRowColumn
Sensor deployment chart ( t = xyz = 5 lowast 4 lowast 3)
Figure 1 Positions of deployed sensors for the levels rows and columns
the deployment with diamond square and triangle shapesindicates the node location on each level row and columnrespectively The objective of the deployment is to help savetrapped miners in an emergency evacuation situation
22 Communication and Transmission Reach TheTTE com-munication system transmits voice and data through solidearth rock and concrete and is suitable for challengingunderground environments such as mines tunnels andsubways Figures 2(a)ndash2(c) show the positions of the TTEas laid underground such as vertical-to-surface horizontalbetween levels and horizontal through obstruction respec-tivelyThere were stationary sensor nodes monitoring carbonmonooxide temperature and so forth as well as mobile sen-sors (humans and vehicles) distributed uniformly Both sta-tionary andmobile sensor nodes were connected to either theAccess Point (AP) andor Access Point Heads (AP Heads)based on transmission range requirements The AP Headsserve as cluster leaders and are located in areas where the rockis relatively soft or has relatively better signal penetrationThis will ensure that nodes are able to transmit the informa-tion they receive from APs and sensor nodes The APs areconnected to other APs or Through-The-Earth (TTE) inFigure 3
The TTE is dropped through a drilled hole down 300metres apart based on the rock typeThe depth and rock typedetermine the required number of TTEs needed (Figure 4)Next the data mule is discharged to carry items such as foodwater and equipments to theminers underground and returnwith underground information to rescue team (Figure 5)
Minimizing the transmission range of wireless sensornetworks is vital to the efficient routing of the network This
is because the amount of communication energy that eachsensor consumes is highly related to its transmission range[30ndash32] The node signal reach (SRnode) is defined as theintegration of the change of the minimum and maximumsignal reach taking into consideration the 6 cases of the rockstructure 120573 where 120573 lies between the soft rock (07) and thehardest rock (09) and is given as
SRnode = 119873120575min + int
max
min119873120575119889119903
120573=07le120573le09
(3)
where SRmin and SRmax are minimum and maximum signalreach respectively and each represented as
SRmin =min (119871min (119877 119862))
SRmax =max (119871max (119877 119862))
(4)
The relationship between rock hardness and the signal reachis a complicated nonlinear function which is related to theskin depth of the rock with alternating currents concentratedin the outer region of a conductor (skin depth) by opposinginternal magnetic fields as follows
Skin depth = radic2
(120588 lowast 120596 lowast 120590)(5)
for 120588 is material conductivity 120596 is frequency and 120590 ismagnetic permeability
The signal (119861-field) is attenuated by cube of distance (119889)
119861 = (119896) 1198893
(6)
Signal reach (distance) = 3 lowast skin depth
4 International Journal of Distributed Sensor Networks
(a) Vertical-to-surface (b) Horizontal between levels (c) Horizontal-through-obstruction
Figure 2 TTE-two-way voice and data communication
End start
End end
Surface
Mobile sensor with RFID
APAP head
TTE Stationary sensors
End stop
TTE was being
apartdropped down 300m
Figure 3 Topology structure of stationary and mobile sensors deployed
TTE
Mobile sensor with radio
Drilled hole
Figure 4 TTE radios dropped through drilled hole from surface to underground (300) meters
International Journal of Distributed Sensor Networks 5
Table 1 Common rocks found in typical mines in relation to hardness or softness
Nonlinear mapping Mica Coal Granite Feldspar Quartz MineralSoftness 070 080 083 086 0875 090Hardness 2 3 5 6 7 9Distance 750m 470m 390m 315m 278 78m
Data mule sends food water radiosequipmentsetc to miners and returns with information
Level (L)Row (R)Column (C)
251013
ROW R1 R2 RN
L1L2
Lm
TTEMobile sensor
Datamule
Column C1C2 middot middot middotCq
Figure 5 Data mule sends radios food water and so forth to and from miners and rescue team
Table 1 identifies 6 common rocks found inmines in rela-tion to hardness or softness of each rock
For a connection to be made the absolute difference bet-ween 119894 and 119895 should be less than the node signal reach (SRnode)and is represented as connection
119872C (119894 119895) = 1 if 1003817100381710038171003817119894 minus 1198951003817100381710038171003817 le SRnode otherwise 0
the initial routing matrix (prod
rout) = 119872C
(7)
Multihub wireless networks give rise to distinct challengessuch as limited sensing and communication resources utiliza-tion [33] The routing path has the constraints of maximumpoint to multipoint connection 119872
120588
imposed on it (thereforeeach nodewill connect toAPsAPheads119872
120588
times to generatethe routing path matrix and the routing (prodrout) for thetransmission was given as
prod
rout= 1 if 1003817100381710038171003817119894 minus 119895
1003817100381710038171003817 ge (
119872120588
2) otherwise 0 (8)
for 119894 119895 = 1 119879 119872120588
is the multipoint (even) to allow bidirec-tional communication and 119894 119895 tracks the source and destina-tion nodes respectively Consider
119872C = (
(
1 1 0 0 0 0
1 1 1 0 1 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
119872rout =(
(
1 1 0 0 0 0
1 1 1 0 0 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
(9)
3 Network Fault Tolerant Hardware andSoftware Considerations
31 Network Fault Tolerant Security and managementschemes are critical issues in wireless sensor networks as itsignificantly affects the efficiency of the communication andmany key management schemes had been proposed to mit-igate the constraints [33 34] As stated earlier undergroundmines are characterized with high accident rates which posegreat danger to the communication infrastructure Accidentssuch as fire flooding cave-ins or gases can destroy base sta-tions communication or lighting systems Battery drain andvirus can cause sensors to die invariably creating potentialdanger to miners underground Assuming a third failure rateas (1 minus 120593) affects the routing matrix (119872rout) where 120593 is anyrandom value within 120573 the result would be an explosionmatrix
(prod
120597
) = (1 minus 120593)prod
rout (10)
In assessing the damage and generating the failed matrix(prod
∓
) limits were set to 120582 and 120582 for lower and higher limits
6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 3
0
1
2
3
4
51 2 3 4 5
6 78
910
1112
131415161718
1920
2122
2324
25262728293031323334353637
3839
4041
4243
444546474849
5051
5253
5455
5657 58 59 60
LevelRowColumn
Sensor deployment chart ( t = xyz = 5 lowast 4 lowast 3)
Figure 1 Positions of deployed sensors for the levels rows and columns
the deployment with diamond square and triangle shapesindicates the node location on each level row and columnrespectively The objective of the deployment is to help savetrapped miners in an emergency evacuation situation
22 Communication and Transmission Reach TheTTE com-munication system transmits voice and data through solidearth rock and concrete and is suitable for challengingunderground environments such as mines tunnels andsubways Figures 2(a)ndash2(c) show the positions of the TTEas laid underground such as vertical-to-surface horizontalbetween levels and horizontal through obstruction respec-tivelyThere were stationary sensor nodes monitoring carbonmonooxide temperature and so forth as well as mobile sen-sors (humans and vehicles) distributed uniformly Both sta-tionary andmobile sensor nodes were connected to either theAccess Point (AP) andor Access Point Heads (AP Heads)based on transmission range requirements The AP Headsserve as cluster leaders and are located in areas where the rockis relatively soft or has relatively better signal penetrationThis will ensure that nodes are able to transmit the informa-tion they receive from APs and sensor nodes The APs areconnected to other APs or Through-The-Earth (TTE) inFigure 3
The TTE is dropped through a drilled hole down 300metres apart based on the rock typeThe depth and rock typedetermine the required number of TTEs needed (Figure 4)Next the data mule is discharged to carry items such as foodwater and equipments to theminers underground and returnwith underground information to rescue team (Figure 5)
Minimizing the transmission range of wireless sensornetworks is vital to the efficient routing of the network This
is because the amount of communication energy that eachsensor consumes is highly related to its transmission range[30ndash32] The node signal reach (SRnode) is defined as theintegration of the change of the minimum and maximumsignal reach taking into consideration the 6 cases of the rockstructure 120573 where 120573 lies between the soft rock (07) and thehardest rock (09) and is given as
SRnode = 119873120575min + int
max
min119873120575119889119903
120573=07le120573le09
(3)
where SRmin and SRmax are minimum and maximum signalreach respectively and each represented as
SRmin =min (119871min (119877 119862))
SRmax =max (119871max (119877 119862))
(4)
The relationship between rock hardness and the signal reachis a complicated nonlinear function which is related to theskin depth of the rock with alternating currents concentratedin the outer region of a conductor (skin depth) by opposinginternal magnetic fields as follows
Skin depth = radic2
(120588 lowast 120596 lowast 120590)(5)
for 120588 is material conductivity 120596 is frequency and 120590 ismagnetic permeability
The signal (119861-field) is attenuated by cube of distance (119889)
119861 = (119896) 1198893
(6)
Signal reach (distance) = 3 lowast skin depth
4 International Journal of Distributed Sensor Networks
(a) Vertical-to-surface (b) Horizontal between levels (c) Horizontal-through-obstruction
Figure 2 TTE-two-way voice and data communication
End start
End end
Surface
Mobile sensor with RFID
APAP head
TTE Stationary sensors
End stop
TTE was being
apartdropped down 300m
Figure 3 Topology structure of stationary and mobile sensors deployed
TTE
Mobile sensor with radio
Drilled hole
Figure 4 TTE radios dropped through drilled hole from surface to underground (300) meters
International Journal of Distributed Sensor Networks 5
Table 1 Common rocks found in typical mines in relation to hardness or softness
Nonlinear mapping Mica Coal Granite Feldspar Quartz MineralSoftness 070 080 083 086 0875 090Hardness 2 3 5 6 7 9Distance 750m 470m 390m 315m 278 78m
Data mule sends food water radiosequipmentsetc to miners and returns with information
Level (L)Row (R)Column (C)
251013
ROW R1 R2 RN
L1L2
Lm
TTEMobile sensor
Datamule
Column C1C2 middot middot middotCq
Figure 5 Data mule sends radios food water and so forth to and from miners and rescue team
Table 1 identifies 6 common rocks found inmines in rela-tion to hardness or softness of each rock
For a connection to be made the absolute difference bet-ween 119894 and 119895 should be less than the node signal reach (SRnode)and is represented as connection
119872C (119894 119895) = 1 if 1003817100381710038171003817119894 minus 1198951003817100381710038171003817 le SRnode otherwise 0
the initial routing matrix (prod
rout) = 119872C
(7)
Multihub wireless networks give rise to distinct challengessuch as limited sensing and communication resources utiliza-tion [33] The routing path has the constraints of maximumpoint to multipoint connection 119872
120588
imposed on it (thereforeeach nodewill connect toAPsAPheads119872
120588
times to generatethe routing path matrix and the routing (prodrout) for thetransmission was given as
prod
rout= 1 if 1003817100381710038171003817119894 minus 119895
1003817100381710038171003817 ge (
119872120588
2) otherwise 0 (8)
for 119894 119895 = 1 119879 119872120588
is the multipoint (even) to allow bidirec-tional communication and 119894 119895 tracks the source and destina-tion nodes respectively Consider
119872C = (
(
1 1 0 0 0 0
1 1 1 0 1 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
119872rout =(
(
1 1 0 0 0 0
1 1 1 0 0 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
(9)
3 Network Fault Tolerant Hardware andSoftware Considerations
31 Network Fault Tolerant Security and managementschemes are critical issues in wireless sensor networks as itsignificantly affects the efficiency of the communication andmany key management schemes had been proposed to mit-igate the constraints [33 34] As stated earlier undergroundmines are characterized with high accident rates which posegreat danger to the communication infrastructure Accidentssuch as fire flooding cave-ins or gases can destroy base sta-tions communication or lighting systems Battery drain andvirus can cause sensors to die invariably creating potentialdanger to miners underground Assuming a third failure rateas (1 minus 120593) affects the routing matrix (119872rout) where 120593 is anyrandom value within 120573 the result would be an explosionmatrix
(prod
120597
) = (1 minus 120593)prod
rout (10)
In assessing the damage and generating the failed matrix(prod
∓
) limits were set to 120582 and 120582 for lower and higher limits
6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Distributed Sensor Networks
(a) Vertical-to-surface (b) Horizontal between levels (c) Horizontal-through-obstruction
Figure 2 TTE-two-way voice and data communication
End start
End end
Surface
Mobile sensor with RFID
APAP head
TTE Stationary sensors
End stop
TTE was being
apartdropped down 300m
Figure 3 Topology structure of stationary and mobile sensors deployed
TTE
Mobile sensor with radio
Drilled hole
Figure 4 TTE radios dropped through drilled hole from surface to underground (300) meters
International Journal of Distributed Sensor Networks 5
Table 1 Common rocks found in typical mines in relation to hardness or softness
Nonlinear mapping Mica Coal Granite Feldspar Quartz MineralSoftness 070 080 083 086 0875 090Hardness 2 3 5 6 7 9Distance 750m 470m 390m 315m 278 78m
Data mule sends food water radiosequipmentsetc to miners and returns with information
Level (L)Row (R)Column (C)
251013
ROW R1 R2 RN
L1L2
Lm
TTEMobile sensor
Datamule
Column C1C2 middot middot middotCq
Figure 5 Data mule sends radios food water and so forth to and from miners and rescue team
Table 1 identifies 6 common rocks found inmines in rela-tion to hardness or softness of each rock
For a connection to be made the absolute difference bet-ween 119894 and 119895 should be less than the node signal reach (SRnode)and is represented as connection
119872C (119894 119895) = 1 if 1003817100381710038171003817119894 minus 1198951003817100381710038171003817 le SRnode otherwise 0
the initial routing matrix (prod
rout) = 119872C
(7)
Multihub wireless networks give rise to distinct challengessuch as limited sensing and communication resources utiliza-tion [33] The routing path has the constraints of maximumpoint to multipoint connection 119872
120588
imposed on it (thereforeeach nodewill connect toAPsAPheads119872
120588
times to generatethe routing path matrix and the routing (prodrout) for thetransmission was given as
prod
rout= 1 if 1003817100381710038171003817119894 minus 119895
1003817100381710038171003817 ge (
119872120588
2) otherwise 0 (8)
for 119894 119895 = 1 119879 119872120588
is the multipoint (even) to allow bidirec-tional communication and 119894 119895 tracks the source and destina-tion nodes respectively Consider
119872C = (
(
1 1 0 0 0 0
1 1 1 0 1 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
119872rout =(
(
1 1 0 0 0 0
1 1 1 0 0 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
(9)
3 Network Fault Tolerant Hardware andSoftware Considerations
31 Network Fault Tolerant Security and managementschemes are critical issues in wireless sensor networks as itsignificantly affects the efficiency of the communication andmany key management schemes had been proposed to mit-igate the constraints [33 34] As stated earlier undergroundmines are characterized with high accident rates which posegreat danger to the communication infrastructure Accidentssuch as fire flooding cave-ins or gases can destroy base sta-tions communication or lighting systems Battery drain andvirus can cause sensors to die invariably creating potentialdanger to miners underground Assuming a third failure rateas (1 minus 120593) affects the routing matrix (119872rout) where 120593 is anyrandom value within 120573 the result would be an explosionmatrix
(prod
120597
) = (1 minus 120593)prod
rout (10)
In assessing the damage and generating the failed matrix(prod
∓
) limits were set to 120582 and 120582 for lower and higher limits
6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 5
Table 1 Common rocks found in typical mines in relation to hardness or softness
Nonlinear mapping Mica Coal Granite Feldspar Quartz MineralSoftness 070 080 083 086 0875 090Hardness 2 3 5 6 7 9Distance 750m 470m 390m 315m 278 78m
Data mule sends food water radiosequipmentsetc to miners and returns with information
Level (L)Row (R)Column (C)
251013
ROW R1 R2 RN
L1L2
Lm
TTEMobile sensor
Datamule
Column C1C2 middot middot middotCq
Figure 5 Data mule sends radios food water and so forth to and from miners and rescue team
Table 1 identifies 6 common rocks found inmines in rela-tion to hardness or softness of each rock
For a connection to be made the absolute difference bet-ween 119894 and 119895 should be less than the node signal reach (SRnode)and is represented as connection
119872C (119894 119895) = 1 if 1003817100381710038171003817119894 minus 1198951003817100381710038171003817 le SRnode otherwise 0
the initial routing matrix (prod
rout) = 119872C
(7)
Multihub wireless networks give rise to distinct challengessuch as limited sensing and communication resources utiliza-tion [33] The routing path has the constraints of maximumpoint to multipoint connection 119872
120588
imposed on it (thereforeeach nodewill connect toAPsAPheads119872
120588
times to generatethe routing path matrix and the routing (prodrout) for thetransmission was given as
prod
rout= 1 if 1003817100381710038171003817119894 minus 119895
1003817100381710038171003817 ge (
119872120588
2) otherwise 0 (8)
for 119894 119895 = 1 119879 119872120588
is the multipoint (even) to allow bidirec-tional communication and 119894 119895 tracks the source and destina-tion nodes respectively Consider
119872C = (
(
1 1 0 0 0 0
1 1 1 0 1 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
119872rout =(
(
1 1 0 0 0 0
1 1 1 0 0 0
0 1 1 1 0 0
0 0 1 1 1 0
0 0 1 1 1 1
0 0 0 0 1 1
)
)
(9)
3 Network Fault Tolerant Hardware andSoftware Considerations
31 Network Fault Tolerant Security and managementschemes are critical issues in wireless sensor networks as itsignificantly affects the efficiency of the communication andmany key management schemes had been proposed to mit-igate the constraints [33 34] As stated earlier undergroundmines are characterized with high accident rates which posegreat danger to the communication infrastructure Accidentssuch as fire flooding cave-ins or gases can destroy base sta-tions communication or lighting systems Battery drain andvirus can cause sensors to die invariably creating potentialdanger to miners underground Assuming a third failure rateas (1 minus 120593) affects the routing matrix (119872rout) where 120593 is anyrandom value within 120573 the result would be an explosionmatrix
(prod
120597
) = (1 minus 120593)prod
rout (10)
In assessing the damage and generating the failed matrix(prod
∓
) limits were set to 120582 and 120582 for lower and higher limits
6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Distributed Sensor Networks
respectively Therefore prod119898
= prod120597
(119894 119895)(120582120582) such thatprod
∓
(119894 119895) = 1 if
prod
120597
(119894 119895) lt 120582 or 0 if prod120597
(119894 119895) gt 120582
otherwise prod
∓
=prod
120597
(119894 119895)
120582
(11)
prod
120597
= (
(
0 10 6 0 33 2
3 5 7 2 1 3
4 4 3 6 0 26
6 0 1 0 11 1
15 20 8 0 17 0
1 0 8 8 2 0
)
)
prod
∓
= (
(
10 00 ≃1 10 00 10
05 083 00 10 10 05
067 067 05 ≃1 10 00
≃1 10 10 10 00 10
00 00 00 10 00 10
10 10 00 00 10 10
)
)
(12)
The exact element of figures is used in calculation for ≃ 1= 0999983 in the failed matrix Elements are approximatedto 2 decimal places for simplicity
The failure that resulted from the random explosion ispresented in a matrix (prod
∓
) Getting a new path for transmis-sion the failed matrix (prod
∓
) was optimized as follows
prod
120591
= prod
∓
lowast 119872rout (13)
The objective is to find a routing path that has the maximumsurvivability The matrix elements ldquo1srdquo and other fractions(05 067 and 083) refer to the probability that data wouldbe able to transmit to and from its source and destinationrespectively It also shows where a decision needs to be takenfor example whether the same message should be sent twiceor whether two nodes of 05 should send a one message ldquo0rdquomeans that the link is dead Consider
119872120591
= (
(
10 00
05 083 00
067 05 10
10 10 00
10 00 10
10 10
)
)
119872PSOminus opimised = (
(
08 0 0
04 067 0 0
0 053 04 08
0 08 08 0
0 08 0 08
0 08 08
)
)
(14)
The survivability indicates a number of parallel connections(prod
120591
) between every node to all the sink(s) and describes thesuccess rate from each node to the sink(s) in most practicalapplications more than one sink is used and sink node iseither through the fiber or TTE connection
32 Hardware and Software Considerations In real rescuesituations software and hardware including radio frequencyidentification (RFID) [35] can fail as a result of accidentswhich can significantly affect the routing path and thwart theefforts of the rescue team Equally miners can make othermistakes in the face of accident that can compound the exist-ing problem(s) especially where they find themselves morethan 4000 feet underground as it is in one of the minefieldused for this study It is therefore imperative to consider suchfailures in developing rescue models The RFID failure ratewas formulated as
119881119898RFID = 1 minus (1
1 minus 120573)prod
rout (15)
The hardware survival rate was given as119867Vard = min (1QV119898RFID [119883Ψ]) (16)
where [119883Ψ] = [((1 minus ∢) lowast prod120591
) lowast prodrout]120574119872119901
∢ is errors ormistakes committed during an accident and 120574 = 120578
∙
minus ∢ 120578∙
isthe number of exits availableThe database failure rate (119878
Θ
) is
119878Θ
= 1 minus ((1
119879 + random) (ldquoGeometricrdquo fail 119879 119879)) (17)
For particular mine 6 common rocks found in typical coalmine are trained together Data was collected from WangXing village located inXinzhenCity Henan Province China
An optimized vector 119872119881
generated as the optimum setof transmission routing table that has the highest survivalprobability for data transmission was given as
119872119881
= (prod
∓
119872rout∢) lowast (119873119890 minus ∢) (18)
where119872119881
= 119877 for the training119873119890 is the number of safe exits available (that is available
exit (120578∙
) less errors) 119877 is an input vector for the neural net-work
4 Related Work
Communication in the undergroundmine setting is relativelynew compared with the long history of mining worldwide[34] Transmitting data wirelessly impact significant benefitsto those investigating buildings thus allowing them to deploysensors and monitor from a remote location [30 36] Toeffectively gain the needed results in the WSN researchershave come out with a number of techniques to address theproblem of topology control (TC)These include localizationof nodes in 3D environment in terms of signal overhead(beacon) localization time error and path-loss transmissionrange and total load each node experiences and energyconservation [31 37] among others Power consumptionmanagement is very crucial in optimizing the efficiency andminimizing cost in wireless sensor networks [38] In largemines for instance the number of sensors can quickly go upto 10s of 1000s and the optimization calculation cannot bedone on robot over the spot due to battery power constraintsTo solve this problem we employ neural network to do fastcalculation on the spot and train the neurons ahead of timefor each mine application
International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 7
X1
X2
Xn
w1
w2
wn
u
f(u)
yn
sumi=1
wixi int
Figure 6 Basic neural network structure
5 System Model
In the generalized neural network models the operation ofa single neuron can be divided into a weighted sum and anoutput function as indicated in Figure 6
The weighted sum 11990811199082 119908119899 computes the activa-tion level 119906 of the neurons with the output function 119891(119906)
giving the actual output 119910 of the neuron The initial inputs1 2 119899 are summed together as 119906 = sum
119899
119894=1
119908119894119909119894 such that119908is weights of the neuron for the 119894th input and 119906 means thatthe activation level is scaled according to the output functionThe sigmoid output function can be expressed as 119910 = 119891(119906) =
1(1+119890minus119888119906
) 119888 is a positive constant which controls the slope orsteepness of the sigmoid and the sigmoid function amplifiesand limits the small activation levels and high activationlevels respectively In practice the output of (119910) lies between[1 0] however for outputs that requires negative values thehyperbolic tangent is used 119910 = 119891(119906) = tanh(119888119906) = [(119890
119888119906
minus 119890 minus
119888119906)(119890119888119906
+ 119890minus119888119906
)] [39ndash41]For 119875119873 as the position of the 119899th particle 119877 is the input
from (18) and 1198781 and 1198782 are number of neurons at hiddenand output layers respectively Consider
119875119873 =
119873
sum
119894=1
119877119894119878119894 +
2
sum
119894=1
119878119894 +
2
sum
119894=1
119878119894119878119894 + 1
10038171003817100381710038171003817100381710038171003817
1 le 119894 le 119904
1 le 119896 le 119877 (19)
The weights were given as
119882119894 = 119878119894119877 1198822 = 119878119894119877 119882119898 = 119878119898119877
119875119894 = [119877 (119894 minus 119895) + 119870] = 119882119894 (119894 119896) (20)
There were two thresholds (1198781 rArr 1198611)
hidden 1198611
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198781
output 1198612
(119894 119895) = 119875 (1198771198781 + 11987811198782) 997904rArr 1198782
(21)
Evaluation of the Fitness Function The architecture of thelearning algorithm and the activation functions wereincluded in the neural networks Neurons are trained toprocess store recognize and retrieve patterns or databaseentries to solve combinatorial optimization problems Afterencoding the particles the fitness function was then deter-mined The goodness of the fit was diagnosed using meansquared error (MSE) as
MSE =1
119899119904
119899
sum
119895=1
119904
sum
119894=1
(119884119895119894
minus 119910119895119894
)2
(22)
where 119899 is number of samples 119904 is the number of neuron atoutput layer 119884
119895119894
is the ideal value of 119894th sample at 119895th outputand 119910
119895119894
is the actual value of 119894th sample at 119895th output One has
log sig (119877) 119877 = 119882 sdot 119875 + 119861
log sig (119882 sdot 119875 + 119861) =1
1 + 119890minus(119882sdot119875+119861)
(23)
Neuron function 119878-(sigmoid) is log sig 119882 is weight matrix119875 is input vector and 119861 is threshold The normal radial basisfunction for Gaussian is given as 120601(119903) = 119890
minus(120576119903)
2
This involves additional square operation and poses com-
putation burden This paper proposed a compact radial basisfunction based on the Gaussian radial basis function andHelenrsquos [42] definition expressed as
exp (minusabs (119877)) 119877 = 119882 sdot 119875 + 119861
exp (minusabs (119882 sdot 119875 + 119861))
(24)
119882 is weight matrix 119875 is input vector and 119861 is thresholdThe resultant RBF for this paper was displayed as 120601(out) =
exp(minusabs(119877)) based on Helenrsquos definition [42] The focus wason improving the radial basis function for the mine applica-tion
Helenrsquos definition states that a function 120595 [0infin) rarr R
such that 119896(119909 1199091015840
) = 120593(119909 minus 1199091015840
) where 119909 1199091015840
isin 120594
and 119909 sdot 1199091015840 denotes the Euclidean norm with 119896(119909 119909
1015840
) =
exp(minus119909 minus 1199091015840
2
1205752
) as an example of the RBF kernels Theglobal support for RBF radials or kernels has resulted in denseGram matrices that can affect large datasets and thereforeconstructed the following two equations 119896
119862V(119909 1199091015840
) =
120601119862V(119909 minus 119909
1015840
)119896(119909 1199091015840
) and 120601119862V(119909 minus 119909
1015840
) =
[(1 minus 119909 minus 1199091015840
119862)sdot+
]V where 119862 gt 0 119881 ge (119889 + 1)2 and (sdot)
+
isthe positive part The function 120601
119862
(sdot) is a sparsifying operatorwhich thresholds all the entries satisfying (119909 minus 119909
1015840
) ge 119862 tozeros in the GrammatrixThe new kernel resulting from thisconstruction preserves positive definiteness This means thatgiven any pair of inputs 119909 and 119909
1015840 where 119909 = 1199091015840 the shrinkage
(the smaller 119862) is imposed on the function value 119896(119909 1199091015840
)the result is that the Gram matrices 119870 and 119870
119862] can be eithervery similar or quite different depending on the choice of 119862
6 Particle Swarm Optimization
Particle swarm optimization (PSO) an evolutionary algo-rithm is a population-based stochastic optimization tech-nique The idea was conceived by an American researcherand social psychologist James Kennedy in the 1950s He isknown as an originator and researcher of particle swarmoptimizationThe theory is inspired by social behavior of birdflocking or fish schooling The method falls within the cat-egory of Swarm intelligence for solving global optimizationproblems Literature has shown that the PSO is an effectivealternative to established evolutionary algorithms (GA) andretains the conceptual simplicity of the GA much easierto implement and apply to real world complex problemswith discrete continuous and nonlinear design parameters
8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Distributed Sensor Networks
[43 44] Each particle within the swarm is given an initialrandom position and an initial speed of propagation Theposition of the particle represents a solution to the problem asdescribed in amatrix 120591 where119872 and119873 represent the numberof particles in the simulation and the number of dimensionsof the problem respectively [44 45] A random positionrepresenting a possible solution to the problemwith an initialassociated velocity representing a function of the distancefrom the particlersquos current position to the previous positionof good fitness value was given A velocity matrix 119881
119890119897
withthe same dimensions as matrix 120591
119909
described this One has
120591119909
= (
12059111
12059112
1205911119873
12059121
12059122
1205912119873
120591
1198981
1205911198982
120591119872119873
)
119881119890119897
= (
]11
]12
]1119873
]21
]22
]2119873
]1198981
]1198982
]119872119873
)
(25)
While moving in the search space particles commit to mem-ory the position of the best solution they have found At eachiteration of the algorithm each particle moves with a speedthat is a weighted sumof three components the old speed andtwo other speed components which drive the particle towardsthe location in the search space where the particle and neigh-bor particles respectively find the best solutions [46] Thepersonal best position can be represented by an119873times119873matrix120588best and the global best position is an 119873-dimensional vector119866best
120588best = (
12058811
12058812
1205881119873
12058821
12058822
1205882119873
120588
1198981
1205881198982
120588119872119873
)
119866best = (1198921
best 11989212
best 119892119873
best)
(26)
All particles move towards the personal and the globalbest with 120591 120588best 119881119890119897
and 119866best containing all the requiredinformation by the particle swarm algorithmThese matricesare updated on each successive iteration
119881119898119899
= 119881119898119899
+1205741198881
1205781199031
(119901best119898119899
minus 119883119898119898
)+1205741198882
1205781199032
(119892best119899
minus 119883119898119899
)
119883119898119899
= 119881119898119899
(27)
1205741198881
and 1205741198882
are constants set to 13 and 2 respectively and120578
1199031
1205781199032
are random numbersTo prevent particles fromnot converging or converging at
local minimum an adaptive mutation according to thresholdwas introduced Particles positions were updated with newvalue only when the new value is greater than the previousvalue 20 of particles of those obtaining lower values weremade tomutate for faster convergence this is indicated by theflowchart in Figure 7 [47 48]
Yes
Yes
No
No
Initialized particles position velocity
epoch iteration (iter)
Evaluate fitness
Update position and velocity
Initialized threshold
End
Random gtthreshold
Epoch (iteration) = epoch
Mutation = ceil (2lowastrand)
Iter = Iter +1epoch = epoch +1
Iter gt Itermax
While (epoch lt maxEpochampamp gBestfitness gt errGoal)
Figure 7 PSO with adaptive mutation according to threshold
120573 ge 07
Input nodes
120573 le 09
Output nodes
Hidden nodesHidden layers fromw1 to wm calculate alternative routes
length of time memorizing relationships betweeninput and output etc
yR
w1
w2
wm
120573 ge 07 120573 le 09
Figure 8 Topological structure of the neural network training
7 Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithmused to minimize the error between the neural network out-put and desired outputThis is important where relationshipsexist between weights within the hidden and output layersand amongweights ofmore hidden layersThe architecture or
International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 9
0 50 100 150 2000
002
004
Optimized error using PSO with adaptive mutation 300 nodesmdashCRBF
Number of iterations
Fitn
ess v
alue
1 15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001173
Rock hardness case (07ndash09)
(a) CRBF
0002004006008
0 50 100 150 200 250
SBF-PSO optimized errormdashSBF
Number of iterations
Fitn
ess v
alue
07 08 083 086 0875 09
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 001917
Rock hardness case (07ndash09)
(b) SBF
50 100 150 200 2500
002004006008
PSO optimized errormdashGRBF
Number of iterations
Fitn
ess v
alue
15 2 25 3 35 4 45 5 55 6
07
08
09
1Output
Surv
ival
pro
babi
lity
X 249Y 00185
Rock hardness case (07ndash09)
(c) GRBF
Figure 9 Optimised error and survival probability for CRBF SBF and GRBF
model the learning algorithm and the activation functionsare included in neural networks Assuming the input layerhas 4 neurons output layer 3 neurons and the hidden layerhas 6 neurons we can evolve other parameters in the feed-forward network to evolve the weight So the particles wouldbe in a group of weights and there would be 4 lowast 6 + 6 lowast 3 =
42 weights This implies that the particle consists of 42 realnumbersThe range of weight can be set to [minus100 100] Afterencoding the particles the fitness function was determinedusing Matlab for the calculations A 3-layered ANNwas usedto do the classificationThe input layer takes the final survivalvector (18) with a number of hidden layers and an outputlayer The training simulated 6 cases at a time with the firstcase taking the relatively soft rock of 119878 ge 07 the hiddenneurons taking the middle hardness of the rock and theoutput layer taking the hardest of rock 119878 le 09 such that07 le 120573 le 09 The structure of the PSO used is radial basis
function (RBF) displayed in Figure 8 was used by Peng andPan [37] To train the neural networks PSO runs six cases ata time such that runs = round (1198796) + 1 119879 is the dimensionof the minefield and 6 represents the number of cases of rockhardness (07ndash09) in each training
8 Results and Discussion
The result of the final survivability vector 119872119881
(18) was dis-played as
119872119881
=(04430 04336 04374 08728 02965 05778)
(28)
The objective was to find the routing path that has the max-imum survivability The elements ldquo1srdquo and the fractions (05067 and 083) refer to the probability that data would be ableto transmit to and from its source and destination In this
10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Distributed Sensor Networks
Table 2 Scalability of our model in relation to survival probability range robot location and rock type
Location Mica Coal Granite Feldspar Quartz MineralCompact radial basis function (CRBF)
(10 6 5) 0909ndash100 08946ndash09955 08187ndash09996 08083ndash09954 07026ndash09533 06016ndash08184(10 5 4) 09001ndash09997 09011ndash09997 08308ndash09994 07912ndash09608 0712ndash09149 05985ndash08362(6 5 4) 08829ndash09977 08689ndash09999 08378ndash09753 0746ndash0956 06908ndash09129 066ndash0841(3 1 10) 07302ndash08481 06588ndash07816 06341ndash07473 06503ndash07249 0593ndash07156 04445ndash05621
Sigmoid basis function (SBF)(10 6 5) 08892ndash09658 08586ndash09757 084ndash09562 07761ndash0955 07706ndash09495 06393ndash08576(10 5 4) 08788ndash09908 0896ndash09996 087ndash1 07542ndash0995 07598ndash09696 06897ndash08878(6 5 4) 09076ndash09974 08964ndash09928 08464ndash09961 07376ndash09242 05026ndash06056 04858ndash05453(3 1 10) 07608ndash08552 066ndash08325 0609ndash07371 05482ndash06249 05026ndash06056 04856ndash05453
Gaussian-radial basis function (GRBF)(10 6 5) 08532ndash09943 08535ndash09985 08331ndash0992 07518ndash09835 07251ndash09467 006469ndash09025(10 5 4) 08734ndash09893 08466ndash09961 08465ndash09947 07752ndash09708 07444ndash09401 06591ndash08552(6 5 4) 08929ndash09849 08576ndash09956 08383ndash09966 0788ndash09684 0714ndash0942 06595ndash08053(3 1 10) 07714ndash09227 06991ndash08349 04848ndash07077 04788ndash06731 04648ndash06023 03636ndash05117
02468
1012
CPU time (s)Allocated
memory (kb)Peak
memory(kb)CRBF 622548 70744 13500SBF 698729 38332 11564GRBF 753082 110508 12992
Tim
em
emor
y
CPU time and memory efficiencytimes104
Figure 10 CPU time and memory efficiency
study transmission was made through the vector elementsif that element or node ge 120582 where 120582 = 08 else transmissionwas done by more than one node It also shows where adecision needs to be taken For example whether the samemessage should be sent twice by a node or be sent by twonodes on the network It describes the success rate from eachnode to the sink(s) in most practical applications more thanone sink is used and sink node is either through the fiber orTTE connection
Figure 9 shows the optimised error and survival prob-ability for one run as follows CRBF = 0001173 SBF =
001917 and GRBF = 00185 At rock hardness of 90the survival probability was between 73 and 85 In view ofthis the AP heads had to be positioned at areas wherethe rock is relatively soft In addition scalability of CRBFmodel to SBF and GRBF in relations to survival probabilityrange was comparable Robot location and rock type withtheir survival probability ranges are displayed in Table 2The survival probability range also indicated its scalability atvarious robot locations different sizes of sensor nodes and
Table 3 CPU time andmemory efficiency of CRBF SBF and GRBF
1205731
1205732
1205733
1198772
CRBF minus63683119909 261170119909 196864 1SBF minus32201119909 134235119909 minus101336 1GRBF minus103635119909 420661119909 minus316273 1Data in Figure 10 was used for the relationship
at different types of rock softnesshardness The proposedmodel CRBF competed favourably and better in some casescompared to the SBF and GRBF
The CPU time memory allocated and memory at peakperiod were generated by profiling during Matlab simulationand the details recorded after 10 runs for each model Therelationship between the CPU time memory allocated andmemory at peak usage with respect to CRBF SBF and GRBFwas expressed in a second-order polynomial given as
119884119903
= 1205733
1198832
1
+ 1205732
1198831
+ 1205736
(29)
where 1198831
is time 120573 is the coefficient of the polynomial andthe results were displayed in Table 3 and Figure 10 The CPUtime recorded was 622548 for CRBF 698722 for SBF and753082 for GRBF Comparing the three models the second-(2nd-) order polynomial was used for the analysis for CPUtime Memory allocation and memory used are better evenwith increase in sensor nodes
Other parameters assessed were the mean iterationstandard variance standard deviation and the convergencetime 3000 nodes divided into 300 nodes per simulation wereperformed for CRBF and SBF and GRBF From Tables 4 5and 6 the standard variance for the CRBF of 3252592 wasmore consistent with the dataset as compared to 3314 for theSBF which was more dispersed
Similarly the time the particles took to converge in CRBF(925 seconds) was shorter than that of SBF (1019 seconds)and GRBF (104 seconds) On the other hand the mean
International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 11
Table 4 Average performance in various parameters of compact radial basis function (CRBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17380 21592 0044 6200 0008 Good2 22960 50090 0043 12500 0009 Good3 19460 22083 0042 6500 0012 Good4 19180 35493 0043 12500 001 Good5 37900 56349 0044 12500 0011 Good6 23400 36314 0043 12500 0012 Good7 21480 33289 0044 9750 00158 12240 10255 0042 2000 00199 26600 38128 0043 12150 001 Good10 18120 21668 0044 5900 0008 GoodTotal 218720 325259 0432 92500 0114Average 21872 32526 0043 9250 0011Minmax 25660 46094 0002 10500 0011
Good Good Good Good
Table 5 Average performance of various parameters using sigmoid basis function (SBF) with a target error of 001
Runs Mean Iter Std Var Std Dev Conv time F error1 17340 35890 0031 125000 00202 12220 27710 0029 100500 001 Good3 13900 18230 0035 47000 0011 Good4 27500 57640 0034 125000 00285 15580 20850 0034 68500 00196 14180 34870 0037 125000 0012 Good7 14680 20510 0035 52500 00158 15000 34420 0034 125000 0012 Good9 27820 46350 0034 125000 002010 17060 34970 0035 125000 001 GoodTotal 175280 331440 0337 1018500 0157AVG 17528 33144 0034 101850 0016Minmax 15600 39410 0008 78000 0018
Good Good
Table 6 Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 001
Runs MI Std Var Std Dev Conv time F error1 293 40971 00413 11002 2704 46691 00439 1250 0012 Good3 3136 53273 00438 1250 00144 2976 51968 00443 1250 00215 2632 50596 00443 1250 00216 2434 28163 00410 760 0008 Good7 2406 27180 00444 590 0009 Good8 1634 15905 00444 450 0009 Good9 263 45864 00452 1250 0012 Good10 2742 42432 00431 1250 0014Total 262240 403043 04357 104000 0120AVG 26224 40304 00436 10400 0012Minmax 15020 37368 0004 80000 0013
Good Good
12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 International Journal of Distributed Sensor Networks
0 2 4 6 8 100
010203040506070809
1
Particles position
Opt
imise
d er
ror
The structure of SBF CRBF and GRBF
SBFCRBFGRBF
Particles are closer targetless sensitive to inputsconscious on accuracy
Particles are far from targetsensitive to inputs
faster
minus10 minus8 minus6 minus4 minus2
Figure 11 The structure of the CRBF SBF and GRBF
iteration of 17528 and the standard deviation of 00337 inSBF showed more favorable results than that of CRBF whichwas 21872 and 004315 and GRBFrsquos mean iteration of 26224and standard deviation of 00436 respectively In addition
the dataset of CRBFwasmore consistent than SBF andGRBFwhich were more dispersed
From Tables 4ndash6 the errors of the models were alsoaccessed The error goal was set at 001 The initial and finalerrors were analysed against the error goal for the samenumber of simulation in both cases 60 of the results forRBF had 001 as the target set with 20 having 0012 (excessof 0002) and the rest 0015 and 0019 However SBF metthe target at 30 with 20 having 0012 (excess of 0002)the remaining 50 obtained in excess of the above (0005)Additionally the performance of the training in terms of theaverage optimised error was given as 0011 0016 and 0013for CRBF SBF and GRBF respectively This also confirmsthe CRBF superiority over the SBF and GRBF the RBFrsquosaccurateness over the SBF is also consistent with Hidayat andAriwahjoedi [49] From Figure 9 the initial errors of (119884 =
0059) (119884 = 008) and 008were all reduced after the trainingto (119884 = 0001173 at point 119883 = 249) (119884 = 00197 at point119883 = 249) and 119884 = 00185 at point119883 = 249
The results of the general characteristics of the threemodels with a range of weight set at [minus10 10] are presented inmatrix 119860 119861 and 119862 with the characteristic curves in Figure 11
119860 = (
Columns 1 through 15
minus10 minus 9 minus 8 minus 7 minus 6 minus 5 minus 4 minus 3 minus 2 minus 1 0 1 2 3 4
Columns 16 through 21
5 6 7 8 9 10
)
119861 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00180 00474 01192
Columns 10 through 18
02689 05000 07311 08808 09526 09820 09933 09975 09991
Columns 19 through 21
09997 09999 10000
)
)
119862 = (
(
Columns 1 through 9
00000 00001 00003 00009 00025 00067 00183 00498 01353
Columns 10 through 18
03679 10000 03679 01353 00498 00183 00067 00025 00009
Columns 19 through 21
00003 00001 00000
)
)
(30)
The initial stage of the sigmoid function (SBF) grows rela-tively exponential as 119909 touches the 0 and then the growthbegins to slow down towards saturation and stops at maturityas 119910 goes to 1 (Figure 11) The RBF rises from 0 to 1 and fallsas 119909 goes to ldquo10rdquo A combination of both functions where 119909
goes close to negative 4 and intersects the Sigmoid curve at (103679) improves the accuracy Other studies such as veloc-ity-field reconstruction in fluid structure [49] showed theflexibility of the SBF but indicated that the RBF gives betteraccuracy attributable to the influence of function parameters
The CRBF and SBF accelerate from the beginning to thepeak and decrease as they get closer to the target Howeverthe GRBF lagged a while at 119909 = minus2 before rising and fallingclose to 119909 = 2 thereby reducing the survival probability rangeat that point
9 Conclusion
In this study a scale-free wireless sensor routing topologycontrol in 3-dimensional environment for an optimized pathin underground mine rescue operation was discussed Opti-mization was done numerically using Matlab simulation toolwhich generated the optimum set of routing table Throughparticle swarm algorithm the neural network was trained forrescue operation Results showed that the combined CRBFwith PSO provided better results than SBF and PSO orGRBF and PSO in the neural training The proposed modelwas relatively better in terms of scalability and CPU timeefficiencyWe have also shown that the model is fault tolerantand had a maximum survivability routing path for rescueoperations The model could serve as an alternative in rescue
International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 13
operations in the mining sector We look forward to assess ahybrid of this algorithm with other parameters in future
Acknowledgments
The authors would like to appreciate the immense contri-bution of the mining companies where the study was under-taken The authors are grateful to these individuals for theirimmeasurable contributions to this work Fred AttakumaPatrick Addai Isaac Owusu KwankyeThomas KwawAnnanWillet Agongo Nathaniel Quansah Francis Owusu MensahClement Owusu-Asamoah Joseph Adu-Mensah ShadrackAidoo Martin Anokye F T Oduro Ernest Ekow Abano andE Omari-SiawThis workwas supported by theNational Nat-ural Science Foundation of China (no 71271103) and by theSix Talents Peak Foundation of Jiangsu Province
References
[1] Editorial Team ldquoThe 3rd issue of volume 12rdquo Editorial Teamthe 3rd issue of volume 12 Disaster Prevention and Man-agement September 2012 httpwwwemeraldinsightcomproductsjournalsjournalshtmid=dpm
[2] G Hilson C J Hilson and S Pardie ldquoImproving awarenessof mercury pollution in small-scale gold mining communitieschallenges and ways forward in rural Ghanardquo EnvironmentalResearch vol 103 no 2 pp 275ndash287 2007
[3] S Salap M O Karslioglu and N Demirel ldquoDevelopment of aGIS-based monitoring and management system for under-ground coal mining safetyrdquo International Journal of Coal Geol-ogy vol 80 no 2 pp 105ndash112 2009
[4] N Amegbey C Ampong and S Ndur ldquoWater Pollution frommining in Prestea Ghanardquo in Proceedings of the 3rd Interna-tional Conference on Environmental Issues and Waste Manage-ment in Energy and Mineral Production pp 179ndash184 WesternAustralia 1994
[5] H Kucuker ldquoOccupational fatalities among coal mine workersin Zonguldak Turkey 1994ndash2003rdquo Occupational Medicine vol56 no 2 pp 144ndash146 2006
[6] J H Saleh and AM Cummings ldquoSafety in themining industryand the unfinished legacy of mining accidents safety leversand defense-in-depth for addressing mining hazardsrdquo SafetyScience vol 49 no 6 pp 764ndash777 2011
[7] S Mainardi ldquoEarnings and work accident risk a panel dataanalysis on miningrdquo Resources Policy vol 30 no 3 pp 156ndash1672005
[8] C M Coetzee and C J van Staden ldquoDisclosure responses tomining accidents South African evidencerdquo Accounting Forumvol 35 no 4 pp 232ndash246 2011
[9] A R Silva and M C Vuran ldquoDevelopment of a testbed forwireless underground sensor networksrdquo EURASIP Journal onWireless Communications and Networking vol 2010 Article ID620307 2010
[10] Y Gu and T He ldquoBounding communication delay in energyharvesting sensor networksrdquo in Proceedings of the 30th IEEEInternational Conference on Distributed Computing Systems(ICDCS rsquo10) pp 837ndash847 IEEE Computer Society June 2010
[11] D Wu L Bao and R Li ldquoA holistic approach to wirelesssensor network routing in underground tunnel environmentsrdquoComputer Communications vol 33 no 13 pp 1566ndash1573 2010
[12] J HeidemannW Ye JWills A Syed and Y Li ldquoResearch chal-lenges and applications for underwater sensor networkingrdquo inProceedings of IEEE Wireless Communications and NetworkingConference (WCNC rsquo06) pp 228ndash235 April 2006
[13] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[14] N Edalat ldquoResource management and task allocation inenergy harvesting sensor networksrdquo in Proceedings of IEEEInternational Symposium on a World of Wireless Mobile andMultimedia Networks (WoWMoM rsquo12) San Francisco CalifUSA 2012
[15] D Niyato M M Rashid and V K Bhargava ldquoWireless sen-sor networks with energy harvesting technologies a game-the-oretic approach to optimal energy managementrdquo IEEEWirelessCommunications vol 14 no 4 pp 90ndash96 2007
[16] M C Vuran and I F Akyildiz ldquoChannel model and analysis forwireless underground sensor networks in soil mediumrdquo Physi-cal Communication vol 3 no 4 pp 245ndash254 2010
[17] N Meratnia B J van der Zwaag H W van Dijk D J A Bij-waard and P J M Havinga ldquoSensor networks in the low landsrdquoSensors vol 10 no 9 pp 8504ndash8525 2010
[18] S L Goh and D P Mandic ldquoAn augmented CRTRL for com-plex-valued recurrent neural networksrdquo Neural Networks vol20 no 10 pp 1061ndash1066 2007
[19] S Li and F Qin ldquoA dynamic neural network approach for solv-ing nonlinear inequalities defined on a graph and its applicationto distributed routing-free range-free localization of WSNsrdquoNeurocomputing vol 117 pp 72ndash80 2013
[20] S Li ZWang and Y Li ldquoUsing laplacian eigenmap as heuristicinformation to solve nonlinear constraints defined on a graphand its application in distributed range-free localization ofwireless sensor networksrdquo Neural Processing Letters vol 37 pp411ndash424 2013
[21] S Li B Liu B Chen and Y Lou ldquoNeural network basedmobilephone localization using Bluetooth connectivityrdquo Neural Com-puting and Applications pp 1ndash9 2012
[22] L A B Munoz and J J V Ramosy ldquoSimilarity-based heteroge-neous neural networksrdquo Engineering Letters vol 14 no 2 EL-14-2-13 2007 (Advance online publication 16 May 2007)
[23] F Fernandez-Navarro C Hervas-Martınez P A Gutierrez JM Pena-Barragan and F Lopez-Granados ldquoParameter estima-tion of q-Gaussian radial basis functions neural networks witha hybrid algorithm for binary classificationrdquo Neurocomputingvol 75 pp 123ndash134 2012
[24] K Leblebicioglu andUHalici ldquoInfinite dimensional radial basisfunction neural networks for nonlinear transformations onfunction spacesrdquo Nonlinear Analysis Theory Methods andApplications vol 30 no 3 pp 1649ndash1654 1997
[25] F Fernandez-Navarro C Hervas-Martınez J Sanchez-Moned-ero and P A Gutierrez ldquoMELM-GRBF a modified version ofthe extreme learning machine for generalized radial basis func-tionneural networksrdquoNeurocomputing vol 74 no 16 pp 2502ndash2510 2011
[26] S Li S Chen B Liu Y Li and Y Liang ldquoDecentralized kine-matic control of a class of collaborative redundantmanipulatorsvia recurrent neural networksrdquo Neurocomputing vol 91 pp 1ndash10 2012
[27] S Li H Cui Y Li B Liu and Y Lou ldquoDecentralized control ofcollaborative redundant manipulators with partial command
14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

14 International Journal of Distributed Sensor Networks
coverage via locally connected recurrent neural networksrdquoNeural Computing and Application 2012
[28] A-L Barabasi R Albert and H Jeong ldquoMean-field theory forscale-free random networksrdquo Physica A vol 272 no 1 pp 173ndash187 1999
[29] S-H Yook H Jeong and A-L Barabasi ldquoModeling the inter-netrsquos large-scale topologyrdquo Proceedings of the National Academyof Sciences of the United States of America vol 99 no 21 pp13382ndash13386 2002
[30] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[31] S Zarifzadeh A Nayyeri and N Yazdani ldquoEfficient construc-tion of network topology to conserve energy in wireless ad hocnetworksrdquo Computer Communications vol 31 no 1 pp 160ndash173 2008
[32] Q Ling Y Fu and Z Tian ldquoLocalized sensor management formulti-target tracking in wireless sensor networksrdquo InformationFusion vol 12 no 3 pp 194ndash201 2011
[33] Y Chen C-N Chuah and Q Zhao ldquoNetwork configurationfor optimal utilization efficiency of wireless sensor networksrdquoAd Hoc Networks vol 6 no 1 pp 92ndash107 2008
[34] R Riaz A Naureen A Akram A H Akbar K-H Kim and HFarooq Ahmed ldquoA unified security framework with three keymanagement schemes for wireless sensor networksrdquo ComputerCommunications vol 31 no 18 pp 4269ndash4280 2008
[35] X Feng Z Xiao and X Cui ldquoImproved RSSI algorithm forwireless sensor networks in 3Drdquo Journal of ComputationalInformation Systems vol 7 no 16 pp 5866ndash5873 2011
[36] W-S JangWMHealy andM J Skibniewski ldquoWireless sensornetworks as part of a web-based building environmental mon-itoring systemrdquo Automation in Construction vol 17 no 6 pp729ndash736 2008
[37] J Peng and C P Y Pan ldquoParticle swarm optimization RBF forgas emission predictionrdquo Journal of Safety Science and Technol-ogy vol 11 pp 77ndash85 2011
[38] P S Sausen M A Spohn and A Perkusich ldquoBroadcast routingin wireless sensor networks with dynamic power managementand multi-coverage backbonesrdquo Information Sciences vol 180no 5 pp 653ndash663 2010
[39] T M Jamel and BM Khammas ldquoImplementation of a sigmoidactivation function for neural network using FPGArdquo inProceed-ings of the 13th Scientific Conference of Al-Marsquomoon UniversityCollege Baghdad Iraq 2012
[40] P S Rajpal K S Shishodia and G S Sekhon ldquoAn artificialneural network for modeling reliability availability and main-tainability of a repairable systemrdquo Reliability Engineering andSystem Safety vol 91 no 7 pp 809ndash819 2006
[41] W Duch and N Jankowski ldquoSurvey of neural transfer func-tionsrdquo Neural Comping Surveys vol 2 pp 163ndash212 1999
[42] H H Zhang M Genton and P Liu ldquoCompactly supportedradial basis function kernelsrdquo 2004
[43] J Kennedy and R Eberhart ldquoParticle swarm optimizationrsquo inProceedings of IEEE International Conference on Neural Net-works pp 1942ndash1948 December 1995
[44] R C Eberhart and Y Shi ldquoParticle swarm optimization devel-opments applications and resourcesrdquo in Proceedings of the Con-gress on Evolutionary Computation vol 1 pp 81ndash86 May 2001
[45] R Malhotra and A Negi ldquoReliability modeling using particleswarmoptimizationrdquo International Journal of SystemsAssuranceEngineering and Management 2013
[46] D Gies and Y Rahmat-Samii ldquoParticle swarm optimization forreconfigurable phase-differentiated array designrdquo Microwaveand Optical Technology Letters vol 38 no 3 pp 168ndash175 2003
[47] J-Y Kim H-S Lee and J-H Park ldquoA modified particle swarmoptimization for optimal power flowrdquo Journal of ElectricalEngineering amp Technology vol 2 no 4 pp 413ndash419 2007
[48] A Alfi ldquoPSO with adaptive mutation and inertia weight and itsapplication in parameter estimation of dynamic systemsrdquo ActaAutomatica Sinica vol 37 no 5 pp 541ndash549 2011
[49] M I P Hidayat and B Ariwahjoedi ldquoModel of neural net-works with sigmoid and radial basis functions for velocity-fieldreconstruction in fluid-structure interaction problemrdquo Journalof Applied Sciences vol 11 no 9 pp 1587ndash1593 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
Recommended