Hindawi Publishing CorporationISRN Applied MathematicsVolume 2013 Article ID 320180 6 pageshttpdxdoiorg1011552013320180
Research ArticleSliding Mode Control in Finite Time Stabilization forSynchronization of Chaotic Systems
Zhan-Shan Zhao12 Jing Zhang3 and Lian-Kun Sun1
1 School of Computer Science and Software Engineering Tianjin Polytechnic University Tianjin 300387 China2 State Key Laboratory of Computer Science Institute of Software Chinese Academy of Sciences Beijing 100190 China3 Tianjin Vocational Institute Tianjin 300410 China
Correspondence should be addressed to Jing Zhang chufei726163com
Received 1 August 2013 Accepted 16 September 2013
Academic Editors M Sun and L Wu
Copyright copy 2013 Zhan-Shan Zhao et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
An adaptive sliding mode control for chaotic systems synchronization is considered The design of robust finite time convergentcontroller is based on geometric homogeneity and integral slidingmodemanifoldThe knowledge of the upper bound of the systemuncertainties is not prior requiredThe chaos synchronization is presented to system stability based on the Lyapunov stability theoryThe simulation results show the effectiveness of the proposed method
1 Introduction
Nowadays chaos has been seen to have a lot of useful appli-cations in many engineering systems such as secure commu-nications optics power converters chemical and biologicalsystems and neural networks [1ndash5] Chaotic systems aredynamical systems and their response exhibits a lot of specificcharacteristics including an excessive sensitivity to the initialconditions fractal properties of the motion in phase spaceand broad spectrums of Fourier transformThe main featureof chaotic systems is that a very small change in initialconditions leads to very large differences in the system states
Several other control methods have been successfullyapplied to chaoticmotion control For example adaptive con-trol [6 7] presents chaos control of chaotic dynamical systemsby using backstepping design method and so forth Slidingmode control (SMC) is a popular robust control approachfor its robustness against parameter variations and exter-nal disturbances under matching conditions of nonlinearsystems operating under uncertainty conditions as the con-trollers can be designed to compensate for the uncertaintiesor disturbances [8ndash15] References [8ndash11] are concerned withsliding mode control of continuous-time switched stochasticsystems In practice classic SMC suffers from high frequency
chattering as the infinite switching frequency required byideal slidingmode is not achievable Keeping themain advan-tages of the standard sliding mode control the chatteringeffect is reduced and finite time convergence is providedInteresting high-order sliding modes (HOSM) are proposedin [14ndash18] with the robustness of the system during the entireresponse
In order to reduce the chattering the approach in [19]is modified and applied Synchronization in chaotic dynamicsystems so that a continuous feedback is produced combin-ing the robustness of HOSM and finite-time stabilization bycontinuous control The aim of the modified method is todeal with unknown but bounded system uncertainties Theupper bounds of uncertainties are not required to be knownin advance System stability is proven by using the Lyapunovtheory
2 Problem Formulation
A class of uncertain chaotic systems with uncertainties isdescribed as
119894= 119909
119894+1
119899= 119891 (119883 119901 119905)
(1)
2 ISRN Applied Mathematics
where 1 le 119894 le 119899 minus 1 119883 = [119909
1 119909
2 119909
119903]
119879= [119909
1
1
119909
(119899minus1)]
119879 119909 isin 119877
119899 are the state variable and the controlinput respectively 119891(sdot) isin 119877
119899 denotes an uncertain nonlinearfunction 119901 is a vector of uncertain parameters whose valuesbelong to some closed and bounded set In fact severalnonlinear chaotic systems can be transformed into the con-trollable canonical form (1) with some state transformationfor example Rossler systems Lurrsquoe-like system and Duffing-Holmes system
To control the system effectively we propose to add acontrol input 119906 By adding this input the equation of thecontrolled system can be expressed by
119910
119894= 119910
119894+1
119910
119899= 119891 (119884 119905) + 119906
(2)
where119910 isin 119877
119899 is the state vectorThe synchronization problemconsidered in this paper is to design a slidingmode controller119906 based on finite time stabilization which synchronizes thestates of themaster system (1) and the slave system (2) in spiteof the unknown nonlinear parameter vector In other wordsthe aim of synchronization is to make the following
lim119905rarrinfin
119884 minus 119883 = 0 (3)
Let us define the tracking error as
119864 (119905) = 119884 (119905) minus 119883 (119905)
= [119910
1minus 119909
1 119910
2minus 119909
2 119910
119899minus 119909
119899]
119879
= [119890 (119905) 119890 (119905) 119890
(119899minus1)(119905)]
119879
= [119890
1 (119905) 119890
2 (2) 119890
119899 (119905)]
119883 = [119909
1 119909
2 119909
119903]
119879= [119909
1
1 119909
(119899minus1)]
119879
(4)
Subtract (1) from (2) and get
119890
119894= 119890
119894+1
119890
119899= 119891 (119884 119905) minus 119891 (119883 119901 119905) + 119906
(5)
As a case study one is the chaotic Lurrsquoe-like systemconsidered as drive system The Lurrsquoe-like system as masteris considered as follows
1= 119909
2
2= 119909
3
3= 119886
1119909
1+ 119886
2119909
2+ 119886
3119909
3+ 12ℎ (119909
1)
(6)
where
ℎ (119909
1) =
119896119909
1if 1003816
1003816
1003816
1003816
119909
1
1003816
1003816
1003816
1003816
lt
1
119896
sign (119909
1) otherwise
(7)
and 119883 = [119909
1 119909
2 119909
3]
119879 is the state vector The parameters areselected exactly [4] 119886
1= minus68 119886
2= minus39 and 119886
3= minus1
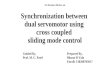
When 119896 = 15 and 119896 = 18 [119909
1(0) 119909
2(0) 119909
3(0)]
119879= [1 1 1]
119879Chaotic responses of system (6) are shown in Figure 1 withoutany control input System (6) shows a chaotic behavior
The systems stated above could be only considered astheoretical models In practice mostly it is not possible toexpress the exactmodel or parameters of the system It meansthat the problem of parameter uncertainty is unavoidableand therefore it must be considered in real systems If system(6) is considered as the master system the slave system of (6)with uncertain parameters and perturbation can be rewrittenin the form
119910
1= 119910
2
119910
2= 119910
3
119910
3= (119886
1+ Δ119886
1) 119910
1+ (119886
2+ Δ119886
2) 119910
2
+ (119886
3+ Δ119886
3) 119910
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 119889 (119905)
(8)
where Δ119886
119894(119894 = 1 2 3) is an uncertain parameter of the chaos
system (8) and 119889(119905) is the disturbance of system (8) Subtract(6) from (8) the real error dynamics would be obtained as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906 + Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(9)
This paper proposes a new adaptive sliding mode con-troller for chaotic systems to not only preserve the advantagesof variable structure control but also release the limitationof knowing the bounds of uncertainties and guarantees theoccurrence of sliding motion and the synchronization ofthe master-slave chaotic systems An adaptive sliding modecontrol based on finite time stabilization is established inSection 3
3 SMC Based on Finite Time Stabilization
In practical terms the resolution of the finite time stabiliza-tion is a delicate task which has generally been studied forhomogeneous systems of negative degree with respect to aflow of a complete vector field Indeed for this kind of sys-tems finite time stability is equivalent to asymptotic stability[13ndash15] A constructive feedback control law for finite timestabilization of all-dimension chain of integrators withoutuncertainty has been proposed in [19] Before designing ourrobust finite time controller we introduce the algorithmgivenin [19] and show its problem in terms of robustness
31 Finite Time Stabilization of an Integrator Chain SystemConsider that the nominal system (9) which is represented
ISRN Applied Mathematics 3
x1 x1
x2
x3
x1
x2
x2
x3
x3
0 1 2 3 4
0
1
2
3
4
5
0 1 2 3 4
0
2
4
6
8
0 5
0
2
4
6
8
02
40
5
0
5
10
minus5
minus8
minus6
minus4
minus2
minus4
minus3
minus2
minus1
minus5
minus4 minus3 minus2 minus1 minus4 minus3 minus2 minus1minus8
minus6
minus4
minus2
minus4
minus2
minus5
minus10
minus5
Figure 1 Chaotic behavior of system 119909
by SISO independent integrator chains is defined as fol-lows
1= 119911
2
119899minus1= 119911
119899
119899= 120596nom
(10)
Lemma 1 (see [19]) Let 119896
1 119896
119899gt 0 be such that the
polynomial 120582
119899+ 119896
119899120582
119899minus1+ sdot sdot sdot + 119896
2120582 + 119896
1is Hurwitz Consider
the system (10) There exists 120576 isin (0 1) such that for every 120572 isin
(1 minus 120576 1) the origin is a globally finite time stable equilibriumfor the system under the feedback
120596nom (119911) = minus119896
1sgn (119911
1)
1003816
1003816
1003816
1003816
119911
1
1003816
1003816
1003816
1003816
1205721
minus sdot sdot sdot minus 119896
119899sgn (119911
119899)
1003816
1003816
1003816
1003816
119911
119899
1003816
1003816
1003816
1003816
120572119899
(11)
4 ISRN Applied Mathematics
where 120572
1 120572
119899satisfy 120572
119894minus1= 120572
119894120572
119894+1(2120572
119894+1minus 120572
119894) 119894 = 2 119899
with 120572
119899+1= 1 and 120572
119899= 120572
In order to design adaptive sliding mode controller foruncertain chaotic systems with unknown bounded uncer-tainties there exist two major phases first an integral slidingmanifold should be selected such that the sliding motion onthe manifold has the desired properties Second an adaptivecontinuous control law should be determined such that theexistence of the sliding mode can be guaranteed withoutknowing the upper bounds of uncertainties from Lemma 1
32 Design of Adaptive Sliding Mode Control Based on FiniteTime Stabilization Consider system (9) which can be triv-ially rewritten as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906+
120573
⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞
Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(12)
It yields
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 120573 (sdot)
(13)
where |120573(sdot)| le 119872 and 119872 is the upper bounds of uncertaintieswith unknown bound
Define the integral sliding manifold for system (9)
119904 = 119890
3minus 119890
3 (0) minus int
119905
0
120596nom119889](14)
It is obvious that
119904 (119905) = 119890
3minus 120596nom (15)
where the construction of control law 120596nom is given inLemma 1 In order to stabilize in finite time system (13) withuncertainties we define the following control law
119906 = 119906
0+ 119906
1 (16)
where 119906
0= minus[119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12(ℎ(119910
1) minus ℎ(119909
1))] + 120596nom
being the ideal control and stabilizes in finite time (13) atthe origin when there are no uncertainties The control law119906
1is designed in order to ensure that the sliding motion
on the sliding manifold is guaranteed for 119905 gt 0 in spite ofuncertainties with unknown bound and is given by
119906
1= minus (120578 +
119866) sign (119904) (17)
where 120578 gt 0 The adaptive law is
119866 = 119902 119904
119866 (0) = 119866
0
(18)
where 119902 gt 0 and 119866
0is the given bounded initial value
Theorem 2 Consider the error system (13) with parametricuncertainties and disturbances then the control law (16) and(17) and the adaptation law (18) can ensure the establishmenterror state trajectory converges to the slidingmanifold (14) 119904 = 0
in finite time
Proof Choose the following Lyapunov function
119881 =
1
2
(119904
2+ 119902
minus1120579
2) (19)
where 120579 isin 119877 denotes the adaptation error that we will definelater
By taking the time derivative of 119881 and we get
119881 = 119904 119904 + 119902
minus1120579
120579
= 119904 ( 119890
3minus 120596nom) + 119902
minus1120579
120579
= 119904 (119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+119906 + 120573 (sdot) minus 120596nom) + 119902
minus1120579
120579
(20)
Using (16)ndash(18) we get
119881 = 119904 (119906
1+ 120573 (sdot)) + 119902
minus1120579
120579
= 119904 [minus (120578 +
119866) sign (119904) + 120573 (sdot)] + 119902
minus1120579
120579
(21)
where the adaptation error defined as 120579 = 119872 minus
119866 we get
119881 = minus120578119904 minus
119866119904 + 120573 (sdot) 119904 + 120579 119904
le minus120578 119904 minus
119866 119904 + 119872 119904 + 120579 119904
le minus120578 119904
(22)
Equation (22) implies that the manifold 119909 isin 119877
119899 119904 = 0
can be reached in spite of uncertainties Substituting (16) into(13) we get the equivalent closed-loop control in the slidingmanifold by differentiating (14) with respect to time in slidingmode
119906eq = minus [119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))] + 120573 (sdot)
(23)
Therefore a higher order sliding mode with respect to thesystem trajectories converges to zero in finite time usingLemma 1
4 Simulation
In this section the presented control algorithm is demon-strated In these numerical simulations the fourth-orderRunge-Kutta method is used to solve Lurrsquoe-like system withtime step size 0001 in MatlabSimulink The parameters areselected as follows
A perturbation 120573(sdot) = 05 sin(2119910
1) + 10 sin(119905) is consid-
ered where 119899 = 3 120572
3= 34 120572
2= 35 120572
1= 12 119896
1= 3
119896
2= 25 119896
3= 1 and 120578 = 15 The simulation results are
illustrated in Figure 2 From the figure we can see that the
ISRN Applied Mathematics 5
0 10 20 30 40 50 60 70 80 90 100
005
115
2
Time (s)
0
05
1
15
2
01234
minus2
minus15
minus1
minus1
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus15
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus5
minus4
minus3
minus2
minus1
e1
e2
e3
Figure 2 Time responses of error states
synchronization errors 119890
1 119890
2 and 119890
3will converge to zero in
the finite time Figures 3 and 4 show the control input and thecorresponding slidingmanifold 119878(119905) In particular it is worthyof note that no information of upper bounds of uncertaintiesis used in our control design Estimate value of adaptive gain
119866 is described in Figure 5The adaptation gain parameter andinitial value are set as 119902 = 2 and
119866(0) = 0 Figure 5 shows thatthe adaptation parameter tends to a constant value
5 Conclusions
This work proposes an adaptive SMC controller for nonlinearsystems with parametric uncertainties This method can beviewed as the finite time stabilization based on geometric
0 10 20 30 40 50 60 70 80 90 100
010203040
Time (s)
minus10
minus20
minus30
minus40
minus50
u
Figure 3 Time response of control input 119906(119905)
01234567
0 10 20 30 40 50 60 70 80 90 100Time (s)
s
minus1
minus2
Figure 4 Time response of the corresponding slidingmanifold 119878(119905)
05
1015202530
minus10
minus5
Estimation of G
0 10 20 30 40 50 60 70 80 90 100Time (s)
Figure 5 Time response of parameter estimation value 119866
homogeneity and integral sliding mode control The knowl-edge of the upper bound of the system uncertainties is notprior required Simulation results demonstrate that the pro-posed control method is effective
References
[1] B Nana P Woafo and S Domngang ldquoChaotic synchroniza-tion with experimental application to secure communicationsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 14 no 5 pp 2266ndash2276 2009
6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 ISRN Applied Mathematics
where 1 le 119894 le 119899 minus 1 119883 = [119909
1 119909
2 119909
119903]
119879= [119909
1
1
119909
(119899minus1)]
119879 119909 isin 119877
119899 are the state variable and the controlinput respectively 119891(sdot) isin 119877
119899 denotes an uncertain nonlinearfunction 119901 is a vector of uncertain parameters whose valuesbelong to some closed and bounded set In fact severalnonlinear chaotic systems can be transformed into the con-trollable canonical form (1) with some state transformationfor example Rossler systems Lurrsquoe-like system and Duffing-Holmes system
To control the system effectively we propose to add acontrol input 119906 By adding this input the equation of thecontrolled system can be expressed by
119910
119894= 119910
119894+1
119910
119899= 119891 (119884 119905) + 119906
(2)
where119910 isin 119877
119899 is the state vectorThe synchronization problemconsidered in this paper is to design a slidingmode controller119906 based on finite time stabilization which synchronizes thestates of themaster system (1) and the slave system (2) in spiteof the unknown nonlinear parameter vector In other wordsthe aim of synchronization is to make the following
lim119905rarrinfin
119884 minus 119883 = 0 (3)
Let us define the tracking error as
119864 (119905) = 119884 (119905) minus 119883 (119905)
= [119910
1minus 119909
1 119910
2minus 119909
2 119910
119899minus 119909
119899]
119879
= [119890 (119905) 119890 (119905) 119890
(119899minus1)(119905)]
119879
= [119890
1 (119905) 119890
2 (2) 119890
119899 (119905)]
119883 = [119909
1 119909
2 119909
119903]
119879= [119909
1
1 119909
(119899minus1)]
119879
(4)
Subtract (1) from (2) and get
119890
119894= 119890
119894+1
119890
119899= 119891 (119884 119905) minus 119891 (119883 119901 119905) + 119906
(5)
As a case study one is the chaotic Lurrsquoe-like systemconsidered as drive system The Lurrsquoe-like system as masteris considered as follows
1= 119909
2
2= 119909
3
3= 119886
1119909
1+ 119886
2119909
2+ 119886
3119909
3+ 12ℎ (119909
1)
(6)
where
ℎ (119909
1) =
119896119909
1if 1003816
1003816
1003816
1003816
119909
1
1003816
1003816
1003816
1003816
lt
1
119896
sign (119909
1) otherwise
(7)
and 119883 = [119909
1 119909
2 119909
3]
119879 is the state vector The parameters areselected exactly [4] 119886
1= minus68 119886
2= minus39 and 119886
3= minus1
When 119896 = 15 and 119896 = 18 [119909
1(0) 119909
2(0) 119909
3(0)]
119879= [1 1 1]
119879Chaotic responses of system (6) are shown in Figure 1 withoutany control input System (6) shows a chaotic behavior
The systems stated above could be only considered astheoretical models In practice mostly it is not possible toexpress the exactmodel or parameters of the system It meansthat the problem of parameter uncertainty is unavoidableand therefore it must be considered in real systems If system(6) is considered as the master system the slave system of (6)with uncertain parameters and perturbation can be rewrittenin the form
119910
1= 119910
2
119910
2= 119910
3
119910
3= (119886
1+ Δ119886
1) 119910
1+ (119886
2+ Δ119886
2) 119910
2
+ (119886
3+ Δ119886
3) 119910
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 119889 (119905)
(8)
where Δ119886
119894(119894 = 1 2 3) is an uncertain parameter of the chaos
system (8) and 119889(119905) is the disturbance of system (8) Subtract(6) from (8) the real error dynamics would be obtained as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906 + Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(9)
This paper proposes a new adaptive sliding mode con-troller for chaotic systems to not only preserve the advantagesof variable structure control but also release the limitationof knowing the bounds of uncertainties and guarantees theoccurrence of sliding motion and the synchronization ofthe master-slave chaotic systems An adaptive sliding modecontrol based on finite time stabilization is established inSection 3
3 SMC Based on Finite Time Stabilization
In practical terms the resolution of the finite time stabiliza-tion is a delicate task which has generally been studied forhomogeneous systems of negative degree with respect to aflow of a complete vector field Indeed for this kind of sys-tems finite time stability is equivalent to asymptotic stability[13ndash15] A constructive feedback control law for finite timestabilization of all-dimension chain of integrators withoutuncertainty has been proposed in [19] Before designing ourrobust finite time controller we introduce the algorithmgivenin [19] and show its problem in terms of robustness
31 Finite Time Stabilization of an Integrator Chain SystemConsider that the nominal system (9) which is represented
ISRN Applied Mathematics 3
x1 x1
x2
x3
x1
x2
x2
x3
x3
0 1 2 3 4
0
1
2
3
4
5
0 1 2 3 4
0
2
4
6
8
0 5
0
2
4
6
8
02
40
5
0
5
10
minus5
minus8
minus6
minus4
minus2
minus4
minus3
minus2
minus1
minus5
minus4 minus3 minus2 minus1 minus4 minus3 minus2 minus1minus8
minus6
minus4
minus2
minus4
minus2
minus5
minus10
minus5
Figure 1 Chaotic behavior of system 119909
by SISO independent integrator chains is defined as fol-lows
1= 119911
2
119899minus1= 119911
119899
119899= 120596nom
(10)
Lemma 1 (see [19]) Let 119896
1 119896
119899gt 0 be such that the
polynomial 120582
119899+ 119896
119899120582
119899minus1+ sdot sdot sdot + 119896
2120582 + 119896
1is Hurwitz Consider
the system (10) There exists 120576 isin (0 1) such that for every 120572 isin
(1 minus 120576 1) the origin is a globally finite time stable equilibriumfor the system under the feedback
120596nom (119911) = minus119896
1sgn (119911
1)
1003816
1003816
1003816
1003816
119911
1
1003816
1003816
1003816
1003816
1205721
minus sdot sdot sdot minus 119896
119899sgn (119911
119899)
1003816
1003816
1003816
1003816
119911
119899
1003816
1003816
1003816
1003816
120572119899
(11)
4 ISRN Applied Mathematics
where 120572
1 120572
119899satisfy 120572
119894minus1= 120572
119894120572
119894+1(2120572
119894+1minus 120572
119894) 119894 = 2 119899
with 120572
119899+1= 1 and 120572
119899= 120572
In order to design adaptive sliding mode controller foruncertain chaotic systems with unknown bounded uncer-tainties there exist two major phases first an integral slidingmanifold should be selected such that the sliding motion onthe manifold has the desired properties Second an adaptivecontinuous control law should be determined such that theexistence of the sliding mode can be guaranteed withoutknowing the upper bounds of uncertainties from Lemma 1
32 Design of Adaptive Sliding Mode Control Based on FiniteTime Stabilization Consider system (9) which can be triv-ially rewritten as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906+
120573
⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞
Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(12)
It yields
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 120573 (sdot)
(13)
where |120573(sdot)| le 119872 and 119872 is the upper bounds of uncertaintieswith unknown bound
Define the integral sliding manifold for system (9)
119904 = 119890
3minus 119890
3 (0) minus int
119905
0
120596nom119889](14)
It is obvious that
119904 (119905) = 119890
3minus 120596nom (15)
where the construction of control law 120596nom is given inLemma 1 In order to stabilize in finite time system (13) withuncertainties we define the following control law
119906 = 119906
0+ 119906
1 (16)
where 119906
0= minus[119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12(ℎ(119910
1) minus ℎ(119909
1))] + 120596nom
being the ideal control and stabilizes in finite time (13) atthe origin when there are no uncertainties The control law119906
1is designed in order to ensure that the sliding motion
on the sliding manifold is guaranteed for 119905 gt 0 in spite ofuncertainties with unknown bound and is given by
119906
1= minus (120578 +
119866) sign (119904) (17)
where 120578 gt 0 The adaptive law is
119866 = 119902 119904
119866 (0) = 119866
0
(18)
where 119902 gt 0 and 119866
0is the given bounded initial value
Theorem 2 Consider the error system (13) with parametricuncertainties and disturbances then the control law (16) and(17) and the adaptation law (18) can ensure the establishmenterror state trajectory converges to the slidingmanifold (14) 119904 = 0
in finite time
Proof Choose the following Lyapunov function
119881 =
1
2
(119904
2+ 119902
minus1120579
2) (19)
where 120579 isin 119877 denotes the adaptation error that we will definelater
By taking the time derivative of 119881 and we get
119881 = 119904 119904 + 119902
minus1120579
120579
= 119904 ( 119890
3minus 120596nom) + 119902
minus1120579
120579
= 119904 (119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+119906 + 120573 (sdot) minus 120596nom) + 119902
minus1120579
120579
(20)
Using (16)ndash(18) we get
119881 = 119904 (119906
1+ 120573 (sdot)) + 119902
minus1120579
120579
= 119904 [minus (120578 +
119866) sign (119904) + 120573 (sdot)] + 119902
minus1120579
120579
(21)
where the adaptation error defined as 120579 = 119872 minus
119866 we get
119881 = minus120578119904 minus
119866119904 + 120573 (sdot) 119904 + 120579 119904
le minus120578 119904 minus
119866 119904 + 119872 119904 + 120579 119904
le minus120578 119904
(22)
Equation (22) implies that the manifold 119909 isin 119877
119899 119904 = 0
can be reached in spite of uncertainties Substituting (16) into(13) we get the equivalent closed-loop control in the slidingmanifold by differentiating (14) with respect to time in slidingmode
119906eq = minus [119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))] + 120573 (sdot)
(23)
Therefore a higher order sliding mode with respect to thesystem trajectories converges to zero in finite time usingLemma 1
4 Simulation
In this section the presented control algorithm is demon-strated In these numerical simulations the fourth-orderRunge-Kutta method is used to solve Lurrsquoe-like system withtime step size 0001 in MatlabSimulink The parameters areselected as follows
A perturbation 120573(sdot) = 05 sin(2119910
1) + 10 sin(119905) is consid-
ered where 119899 = 3 120572
3= 34 120572
2= 35 120572
1= 12 119896
1= 3
119896
2= 25 119896
3= 1 and 120578 = 15 The simulation results are
illustrated in Figure 2 From the figure we can see that the
ISRN Applied Mathematics 5
0 10 20 30 40 50 60 70 80 90 100
005
115
2
Time (s)
0
05
1
15
2
01234
minus2
minus15
minus1
minus1
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus15
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus5
minus4
minus3
minus2
minus1
e1
e2
e3
Figure 2 Time responses of error states
synchronization errors 119890
1 119890
2 and 119890
3will converge to zero in
the finite time Figures 3 and 4 show the control input and thecorresponding slidingmanifold 119878(119905) In particular it is worthyof note that no information of upper bounds of uncertaintiesis used in our control design Estimate value of adaptive gain
119866 is described in Figure 5The adaptation gain parameter andinitial value are set as 119902 = 2 and
119866(0) = 0 Figure 5 shows thatthe adaptation parameter tends to a constant value
5 Conclusions
This work proposes an adaptive SMC controller for nonlinearsystems with parametric uncertainties This method can beviewed as the finite time stabilization based on geometric
0 10 20 30 40 50 60 70 80 90 100
010203040
Time (s)
minus10
minus20
minus30
minus40
minus50
u
Figure 3 Time response of control input 119906(119905)
01234567
0 10 20 30 40 50 60 70 80 90 100Time (s)
s
minus1
minus2
Figure 4 Time response of the corresponding slidingmanifold 119878(119905)
05
1015202530
minus10
minus5
Estimation of G
0 10 20 30 40 50 60 70 80 90 100Time (s)
Figure 5 Time response of parameter estimation value 119866
homogeneity and integral sliding mode control The knowl-edge of the upper bound of the system uncertainties is notprior required Simulation results demonstrate that the pro-posed control method is effective
References
[1] B Nana P Woafo and S Domngang ldquoChaotic synchroniza-tion with experimental application to secure communicationsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 14 no 5 pp 2266ndash2276 2009
6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

ISRN Applied Mathematics 3
x1 x1
x2
x3
x1
x2
x2
x3
x3
0 1 2 3 4
0
1
2
3
4
5
0 1 2 3 4
0
2
4
6
8
0 5
0
2
4
6
8
02
40
5
0
5
10
minus5
minus8
minus6
minus4
minus2
minus4
minus3
minus2
minus1
minus5
minus4 minus3 minus2 minus1 minus4 minus3 minus2 minus1minus8
minus6
minus4
minus2
minus4
minus2
minus5
minus10
minus5
Figure 1 Chaotic behavior of system 119909
by SISO independent integrator chains is defined as fol-lows
1= 119911
2
119899minus1= 119911
119899
119899= 120596nom
(10)
Lemma 1 (see [19]) Let 119896
1 119896
119899gt 0 be such that the
polynomial 120582
119899+ 119896
119899120582
119899minus1+ sdot sdot sdot + 119896
2120582 + 119896
1is Hurwitz Consider
the system (10) There exists 120576 isin (0 1) such that for every 120572 isin
(1 minus 120576 1) the origin is a globally finite time stable equilibriumfor the system under the feedback
120596nom (119911) = minus119896
1sgn (119911
1)
1003816
1003816
1003816
1003816
119911
1
1003816
1003816
1003816
1003816
1205721
minus sdot sdot sdot minus 119896
119899sgn (119911
119899)
1003816
1003816
1003816
1003816
119911
119899
1003816
1003816
1003816
1003816
120572119899
(11)
4 ISRN Applied Mathematics
where 120572
1 120572
119899satisfy 120572
119894minus1= 120572
119894120572
119894+1(2120572
119894+1minus 120572
119894) 119894 = 2 119899
with 120572
119899+1= 1 and 120572
119899= 120572
In order to design adaptive sliding mode controller foruncertain chaotic systems with unknown bounded uncer-tainties there exist two major phases first an integral slidingmanifold should be selected such that the sliding motion onthe manifold has the desired properties Second an adaptivecontinuous control law should be determined such that theexistence of the sliding mode can be guaranteed withoutknowing the upper bounds of uncertainties from Lemma 1
32 Design of Adaptive Sliding Mode Control Based on FiniteTime Stabilization Consider system (9) which can be triv-ially rewritten as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906+
120573
⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞
Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(12)
It yields
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 120573 (sdot)
(13)
where |120573(sdot)| le 119872 and 119872 is the upper bounds of uncertaintieswith unknown bound
Define the integral sliding manifold for system (9)
119904 = 119890
3minus 119890
3 (0) minus int
119905
0
120596nom119889](14)
It is obvious that
119904 (119905) = 119890
3minus 120596nom (15)
where the construction of control law 120596nom is given inLemma 1 In order to stabilize in finite time system (13) withuncertainties we define the following control law
119906 = 119906
0+ 119906
1 (16)
where 119906
0= minus[119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12(ℎ(119910
1) minus ℎ(119909
1))] + 120596nom
being the ideal control and stabilizes in finite time (13) atthe origin when there are no uncertainties The control law119906
1is designed in order to ensure that the sliding motion
on the sliding manifold is guaranteed for 119905 gt 0 in spite ofuncertainties with unknown bound and is given by
119906
1= minus (120578 +
119866) sign (119904) (17)
where 120578 gt 0 The adaptive law is
119866 = 119902 119904
119866 (0) = 119866
0
(18)
where 119902 gt 0 and 119866
0is the given bounded initial value
Theorem 2 Consider the error system (13) with parametricuncertainties and disturbances then the control law (16) and(17) and the adaptation law (18) can ensure the establishmenterror state trajectory converges to the slidingmanifold (14) 119904 = 0
in finite time
Proof Choose the following Lyapunov function
119881 =
1
2
(119904
2+ 119902
minus1120579
2) (19)
where 120579 isin 119877 denotes the adaptation error that we will definelater
By taking the time derivative of 119881 and we get
119881 = 119904 119904 + 119902
minus1120579
120579
= 119904 ( 119890
3minus 120596nom) + 119902
minus1120579
120579
= 119904 (119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+119906 + 120573 (sdot) minus 120596nom) + 119902
minus1120579
120579
(20)
Using (16)ndash(18) we get
119881 = 119904 (119906
1+ 120573 (sdot)) + 119902
minus1120579
120579
= 119904 [minus (120578 +
119866) sign (119904) + 120573 (sdot)] + 119902
minus1120579
120579
(21)
where the adaptation error defined as 120579 = 119872 minus
119866 we get
119881 = minus120578119904 minus
119866119904 + 120573 (sdot) 119904 + 120579 119904
le minus120578 119904 minus
119866 119904 + 119872 119904 + 120579 119904
le minus120578 119904
(22)
Equation (22) implies that the manifold 119909 isin 119877
119899 119904 = 0
can be reached in spite of uncertainties Substituting (16) into(13) we get the equivalent closed-loop control in the slidingmanifold by differentiating (14) with respect to time in slidingmode
119906eq = minus [119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))] + 120573 (sdot)
(23)
Therefore a higher order sliding mode with respect to thesystem trajectories converges to zero in finite time usingLemma 1
4 Simulation
In this section the presented control algorithm is demon-strated In these numerical simulations the fourth-orderRunge-Kutta method is used to solve Lurrsquoe-like system withtime step size 0001 in MatlabSimulink The parameters areselected as follows
A perturbation 120573(sdot) = 05 sin(2119910
1) + 10 sin(119905) is consid-
ered where 119899 = 3 120572
3= 34 120572
2= 35 120572
1= 12 119896
1= 3
119896
2= 25 119896
3= 1 and 120578 = 15 The simulation results are
illustrated in Figure 2 From the figure we can see that the
ISRN Applied Mathematics 5
0 10 20 30 40 50 60 70 80 90 100
005
115
2
Time (s)
0
05
1
15
2
01234
minus2
minus15
minus1
minus1
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus15
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus5
minus4
minus3
minus2
minus1
e1
e2
e3
Figure 2 Time responses of error states
synchronization errors 119890
1 119890
2 and 119890
3will converge to zero in
the finite time Figures 3 and 4 show the control input and thecorresponding slidingmanifold 119878(119905) In particular it is worthyof note that no information of upper bounds of uncertaintiesis used in our control design Estimate value of adaptive gain
119866 is described in Figure 5The adaptation gain parameter andinitial value are set as 119902 = 2 and
119866(0) = 0 Figure 5 shows thatthe adaptation parameter tends to a constant value
5 Conclusions
This work proposes an adaptive SMC controller for nonlinearsystems with parametric uncertainties This method can beviewed as the finite time stabilization based on geometric
0 10 20 30 40 50 60 70 80 90 100
010203040
Time (s)
minus10
minus20
minus30
minus40
minus50
u
Figure 3 Time response of control input 119906(119905)
01234567
0 10 20 30 40 50 60 70 80 90 100Time (s)
s
minus1
minus2
Figure 4 Time response of the corresponding slidingmanifold 119878(119905)
05
1015202530
minus10
minus5
Estimation of G
0 10 20 30 40 50 60 70 80 90 100Time (s)
Figure 5 Time response of parameter estimation value 119866
homogeneity and integral sliding mode control The knowl-edge of the upper bound of the system uncertainties is notprior required Simulation results demonstrate that the pro-posed control method is effective
References
[1] B Nana P Woafo and S Domngang ldquoChaotic synchroniza-tion with experimental application to secure communicationsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 14 no 5 pp 2266ndash2276 2009
6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 ISRN Applied Mathematics
where 120572
1 120572
119899satisfy 120572
119894minus1= 120572
119894120572
119894+1(2120572
119894+1minus 120572
119894) 119894 = 2 119899
with 120572
119899+1= 1 and 120572
119899= 120572
In order to design adaptive sliding mode controller foruncertain chaotic systems with unknown bounded uncer-tainties there exist two major phases first an integral slidingmanifold should be selected such that the sliding motion onthe manifold has the desired properties Second an adaptivecontinuous control law should be determined such that theexistence of the sliding mode can be guaranteed withoutknowing the upper bounds of uncertainties from Lemma 1
32 Design of Adaptive Sliding Mode Control Based on FiniteTime Stabilization Consider system (9) which can be triv-ially rewritten as
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+ 119906+
120573
⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞
Δ119886
1119910
1+ Δ119886
2119910
2+ Δ119886
3119910
3+ 119889 (119905)
(12)
It yields
119890
1= 119890
2
119890
2= 119890
3
119890
3= 119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1)) + 119906 + 120573 (sdot)
(13)
where |120573(sdot)| le 119872 and 119872 is the upper bounds of uncertaintieswith unknown bound
Define the integral sliding manifold for system (9)
119904 = 119890
3minus 119890
3 (0) minus int
119905
0
120596nom119889](14)
It is obvious that
119904 (119905) = 119890
3minus 120596nom (15)
where the construction of control law 120596nom is given inLemma 1 In order to stabilize in finite time system (13) withuncertainties we define the following control law
119906 = 119906
0+ 119906
1 (16)
where 119906
0= minus[119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12(ℎ(119910
1) minus ℎ(119909
1))] + 120596nom
being the ideal control and stabilizes in finite time (13) atthe origin when there are no uncertainties The control law119906
1is designed in order to ensure that the sliding motion
on the sliding manifold is guaranteed for 119905 gt 0 in spite ofuncertainties with unknown bound and is given by
119906
1= minus (120578 +
119866) sign (119904) (17)
where 120578 gt 0 The adaptive law is
119866 = 119902 119904
119866 (0) = 119866
0
(18)
where 119902 gt 0 and 119866
0is the given bounded initial value
Theorem 2 Consider the error system (13) with parametricuncertainties and disturbances then the control law (16) and(17) and the adaptation law (18) can ensure the establishmenterror state trajectory converges to the slidingmanifold (14) 119904 = 0
in finite time
Proof Choose the following Lyapunov function
119881 =
1
2
(119904
2+ 119902
minus1120579
2) (19)
where 120579 isin 119877 denotes the adaptation error that we will definelater
By taking the time derivative of 119881 and we get
119881 = 119904 119904 + 119902
minus1120579
120579
= 119904 ( 119890
3minus 120596nom) + 119902
minus1120579
120579
= 119904 (119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))
+119906 + 120573 (sdot) minus 120596nom) + 119902
minus1120579
120579
(20)
Using (16)ndash(18) we get
119881 = 119904 (119906
1+ 120573 (sdot)) + 119902
minus1120579
120579
= 119904 [minus (120578 +
119866) sign (119904) + 120573 (sdot)] + 119902
minus1120579
120579
(21)
where the adaptation error defined as 120579 = 119872 minus
119866 we get
119881 = minus120578119904 minus
119866119904 + 120573 (sdot) 119904 + 120579 119904
le minus120578 119904 minus
119866 119904 + 119872 119904 + 120579 119904
le minus120578 119904
(22)
Equation (22) implies that the manifold 119909 isin 119877
119899 119904 = 0
can be reached in spite of uncertainties Substituting (16) into(13) we get the equivalent closed-loop control in the slidingmanifold by differentiating (14) with respect to time in slidingmode
119906eq = minus [119886
1119890
1+ 119886
2119890
2+ 119886
3119890
3+ 12 (ℎ (119910
1) minus ℎ (119909
1))] + 120573 (sdot)
(23)
Therefore a higher order sliding mode with respect to thesystem trajectories converges to zero in finite time usingLemma 1
4 Simulation
In this section the presented control algorithm is demon-strated In these numerical simulations the fourth-orderRunge-Kutta method is used to solve Lurrsquoe-like system withtime step size 0001 in MatlabSimulink The parameters areselected as follows
A perturbation 120573(sdot) = 05 sin(2119910
1) + 10 sin(119905) is consid-
ered where 119899 = 3 120572
3= 34 120572
2= 35 120572
1= 12 119896
1= 3
119896
2= 25 119896
3= 1 and 120578 = 15 The simulation results are
illustrated in Figure 2 From the figure we can see that the
ISRN Applied Mathematics 5
0 10 20 30 40 50 60 70 80 90 100
005
115
2
Time (s)
0
05
1
15
2
01234
minus2
minus15
minus1
minus1
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus15
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus5
minus4
minus3
minus2
minus1
e1
e2
e3
Figure 2 Time responses of error states
synchronization errors 119890
1 119890
2 and 119890
3will converge to zero in
the finite time Figures 3 and 4 show the control input and thecorresponding slidingmanifold 119878(119905) In particular it is worthyof note that no information of upper bounds of uncertaintiesis used in our control design Estimate value of adaptive gain
119866 is described in Figure 5The adaptation gain parameter andinitial value are set as 119902 = 2 and
119866(0) = 0 Figure 5 shows thatthe adaptation parameter tends to a constant value
5 Conclusions
This work proposes an adaptive SMC controller for nonlinearsystems with parametric uncertainties This method can beviewed as the finite time stabilization based on geometric
0 10 20 30 40 50 60 70 80 90 100
010203040
Time (s)
minus10
minus20
minus30
minus40
minus50
u
Figure 3 Time response of control input 119906(119905)
01234567
0 10 20 30 40 50 60 70 80 90 100Time (s)
s
minus1
minus2
Figure 4 Time response of the corresponding slidingmanifold 119878(119905)
05
1015202530
minus10
minus5
Estimation of G
0 10 20 30 40 50 60 70 80 90 100Time (s)
Figure 5 Time response of parameter estimation value 119866
homogeneity and integral sliding mode control The knowl-edge of the upper bound of the system uncertainties is notprior required Simulation results demonstrate that the pro-posed control method is effective
References
[1] B Nana P Woafo and S Domngang ldquoChaotic synchroniza-tion with experimental application to secure communicationsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 14 no 5 pp 2266ndash2276 2009
6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

ISRN Applied Mathematics 5
0 10 20 30 40 50 60 70 80 90 100
005
115
2
Time (s)
0
05
1
15
2
01234
minus2
minus15
minus1
minus1
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus15
minus05
0 10 20 30 40 50 60 70 80 90 100Time (s)
minus5
minus4
minus3
minus2
minus1
e1
e2
e3
Figure 2 Time responses of error states
synchronization errors 119890
1 119890
2 and 119890
3will converge to zero in
the finite time Figures 3 and 4 show the control input and thecorresponding slidingmanifold 119878(119905) In particular it is worthyof note that no information of upper bounds of uncertaintiesis used in our control design Estimate value of adaptive gain
119866 is described in Figure 5The adaptation gain parameter andinitial value are set as 119902 = 2 and
119866(0) = 0 Figure 5 shows thatthe adaptation parameter tends to a constant value
5 Conclusions
This work proposes an adaptive SMC controller for nonlinearsystems with parametric uncertainties This method can beviewed as the finite time stabilization based on geometric
0 10 20 30 40 50 60 70 80 90 100
010203040
Time (s)
minus10
minus20
minus30
minus40
minus50
u
Figure 3 Time response of control input 119906(119905)
01234567
0 10 20 30 40 50 60 70 80 90 100Time (s)
s
minus1
minus2
Figure 4 Time response of the corresponding slidingmanifold 119878(119905)
05
1015202530
minus10
minus5
Estimation of G
0 10 20 30 40 50 60 70 80 90 100Time (s)
Figure 5 Time response of parameter estimation value 119866
homogeneity and integral sliding mode control The knowl-edge of the upper bound of the system uncertainties is notprior required Simulation results demonstrate that the pro-posed control method is effective
References
[1] B Nana P Woafo and S Domngang ldquoChaotic synchroniza-tion with experimental application to secure communicationsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 14 no 5 pp 2266ndash2276 2009
6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 ISRN Applied Mathematics
[2] J M V Grzybowski M Rafikov and J M Balthazar ldquoSyn-chronization of the unified chaotic system and application insecure communicationrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 14 no 6 pp 2793ndash2806 2009
[3] H Salarieh and A Alasty ldquoAdaptive synchronization of twochaotic systemswith stochastic unknown parametersrdquoCommu-nications inNonlinear Science andNumerical Simulation vol 14no 2 pp 508ndash519 2009
[4] C C Yang ldquoOne input control for exponential synchronizationin generalized Lorenz systems with uncertain parametersrdquoJournal of the Franklin Institute vol 349 no 1 pp 349ndash365 2012
[5] M Aghababa and H Aghababa ldquoFinite-time stabilization ofuncertain non-autonomous chaotic gyroscopes with nonlinearinputsrdquo Applied Mathematics and Mechanics vol 33 no 2 pp155ndash164 2012
[6] C C Yang ldquoSynchronization of second-order chaotic systemsvia adaptive terminal sliding mode control with input nonlin-earityrdquo Journal of the Franklin Institute vol 349 no 6 pp 2019ndash2032 2012
[7] MT Yassen ldquoChaos control of chaotic dynamical systems usingbackstepping designrdquoChaos Solitons and Fractals vol 27 no 2pp 537ndash548 2006
[8] L Wu and D W C Ho ldquoSliding mode control of singular sto-chastic hybrid systemsrdquo Automatica vol 46 no 4 pp 779ndash7832010
[9] L Wu X Su and P Shi ldquoSliding mode control with boundedL2 gain performance of Markovian jump singular time-delaysystemsrdquo Automatica vol 48 no 8 pp 1929ndash1933 2012
[10] L Wu P Shi and H Gao ldquoState estimation and sliding-modecontrol ofmarkovian jump singular systemsrdquo IEEETransactionson Automatic Control vol 55 no 5 pp 1213ndash1219 2010
[11] LWuWZheng andHGao ldquoDissipativity-based slidingmodecontrol of switched stochastic systemsrdquo IEEE Transactions onAutomatic Control vol 58 no 3 pp 785ndash793 2013
[12] M P Aghababa and A Heydari ldquoChaos synchronizationbetween two different chaotic systems with uncertainties exter-nal disturbances unknown parameters and input nonlineari-tiesrdquo Applied Mathematical Modelling vol 36 no 4 pp 1639ndash1652 2012
[13] M P Aghababa S Khanmohammadi andG Alizadeh ldquoFinite-time synchronization of two different chaotic systems withunknown parameters via sliding mode techniquerdquo AppliedMathematical Modelling vol 35 no 6 pp 3080ndash3091 2011
[14] HWang Z Z Han Q Y Xie andW Zhang ldquoFinite-time chaoscontrol via nonsingular terminal sliding mode controlrdquo Com-munications inNonlinear Science andNumerical Simulation vol14 no 6 pp 2728ndash2733 2009
[15] S Laghrouche F Plestan and A Glumineau ldquoHigher orderslidingmode control based on integral slidingmoderdquoAutomat-ica vol 43 no 3 pp 531ndash537 2007
[16] I Boiko and L Fridman ldquoAnalysis of chattering in continuoussliding-mode controllersrdquo IEEE Transactions on AutomaticControl vol 50 no 9 pp 1442ndash1446 2005
[17] T Floquet J Barbot andW Perruquetti ldquoHigher-order slidingmode stabilization for a class of nonholonomic perturbed sys-temsrdquo Automatica vol 39 no 6 pp 1077ndash1083 2003
[18] A Levant ldquoHomogeneity approach to high-orde rsliding modedesignrdquo Automatica vol 41 no 5 pp 823ndash830 2005
[19] S Bhat and D Bernstein ldquoGeometric homogeneity with appli-cations to finite-time stabilityrdquoMathematics of Control Signalsand Systems vol 17 no 2 pp 101ndash127 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Recommended