SISTEM KENDALI OTOMATIS
PID (Proportional-Integral-Derivative)

Diagram Blok Sistem Kendali

Pendahuluan
• Urutan cerita : 1. Pemodelan sistem
2. Analisa sistem
3. Pengendalian sistem
• Contoh : motor DC 1. Pemodelan mendapatkan transfer function dan blok
sistem motor DC
2. Analisa memberikan inputan sinyal uji pada motor, menganalisa respon yang dihasilkan
3. Pengendalian mengendalikan motor agar memberikan hasil yang sesuai

Pendahuluan
• Dari analisa respon sistem yang telah kita
lakukan, bagaimana respon sistem yang kita
inginkan?
– Sesuai dengan input/r(t) (misal : unit step)
• Jika tidak sesuai?
– Salah satu caranya dengan menambahkan kontroler
• Fungsi kontroler :
– Mengendalikan sistem dengan memanipulasi sinyal
error, sehingga respon sistem (output) sama dengan
yang kita inginkan (input)

Sistem Kontrol Dasar
• Kontrol On/OFF
• Kontroler Proportional (P)
• Kontroler Integral (I)
• Kontroler Proportional-Integral (PI)
• Kontroler Proportional-Derivative (PD)
• Kontroler Proportional-Integral-Derivative (PID)

Kontrol On/Off

Robot Line Follower


PID

Kontroler Proporsional (P)
• Persamaan matematis :
u(t) = KP . e(t)
dimana KP : konstanta proporsional
dalam Laplace
U(s)/E(s) = KP
Diagram Blok
• Dikenal juga sebagai : gain/penguatan
KP
U(s) E(s) +
-

Kontroler Proporsional (P)
• Pengaruh pada sistem : – Menambah atau mengurangi kestabilan
– Dapat memperbaiki respon transien khususnya : rise time, settling time
– Mengurangi (bukan menghilangkan) Error steady state • Catatan : untuk menghilangkan Ess, dibutuhkan KP besar, yang
akan membuat sistem lebih tidak stabil
• Kontroler Proporsional memberi pengaruh langsung (sebanding) pada error – Semakin besar error, semakin besar sinyal kendali yang
dihasilkan kontroler
+
+
-
+
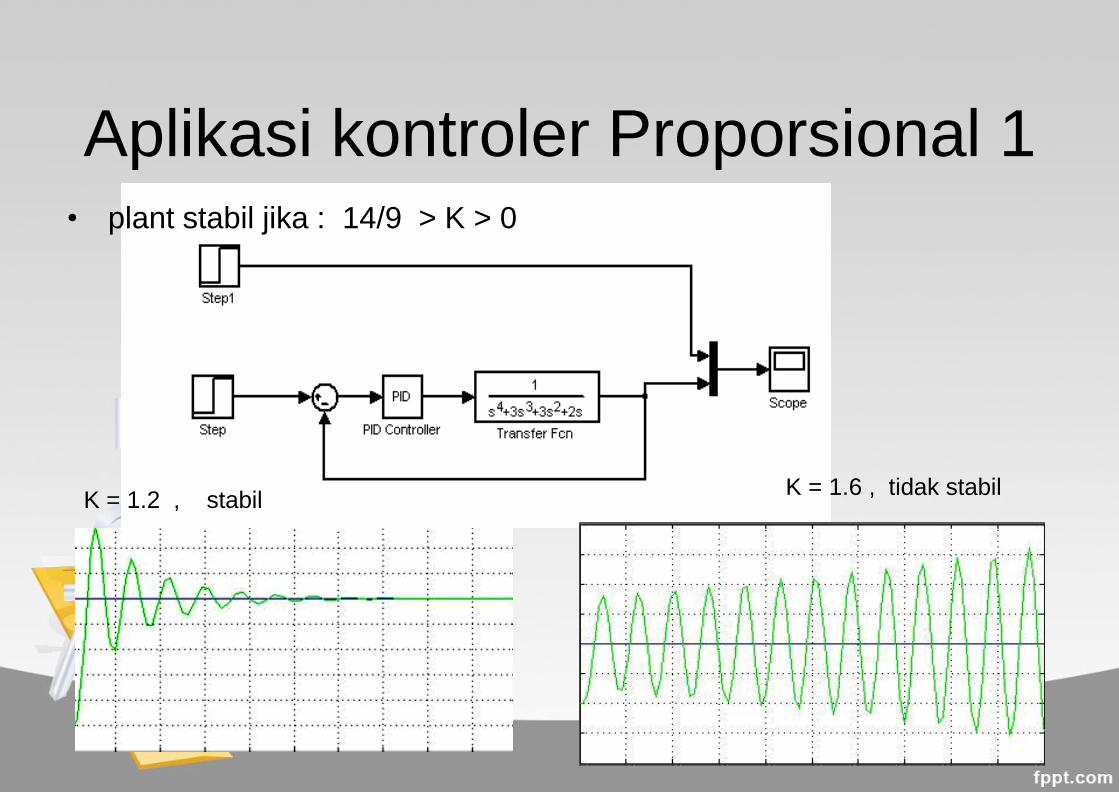
Aplikasi kontroler Proporsional 1 • plant stabil jika : 14/9 > K > 0
K = 1.2 , stabil K = 1.6 , tidak stabil

Aplikasi kontroler Proporsional 2
Tanpa Kontroler, respon lambat Dengan kontroler P, respon cepat
• Contoh 2

Kontroler Integral (I) Persamaan matematis :
dimana Ki : konstanta integral
dalam Laplace
Diagram Blok
Ki / s
U(s) E(s) +
-
t
i dtteKtu0
)()(
s
K
sE
sU i)(
)(

Kontroler Integral (I)
• Pengaruh pada sistem : – Menghilangkan Error Steady State
– Respon lebih lambat (dibanding P)
– Dapat menimbulkan ketidakstabilan (karena menambah orde sistem)
• Perubahan sinyal kontrol sebanding dengan perubahan error – Semakin besar error, semakin cepat sinyal
kontrol bertambah/berubah
+
-
-

Aplikasi kontroler Integral
Respon sistem tanpa kontroler

Aplikasi kontroler Integral Dengan kontroler P, KP = 2
Dengan kontroler I, Ki = 1
Dengan kontroler PI
Kp = 2 , Ki = 1

Aplikasi kontroler Integral
sssG
22
1)(
12
1)(
ssGP
)()(1
1
)(
)(
sHsGsR
sE
sss
sssE
ss
ss
sR
sE
1
12
2)(
12
2
)(
)(
2
2
2
2
01
12
2lim
)(lim
2
2
0
0
sss
sssE
ssEE
sss
sss
• Perhitungan dari contoh tersebut :
ssGC
1)(
• Jika transfer function plant = • Jika transfer function kontroler I =
• Maka transfer function open loop =
• Transfer function error =
• TF Error steady state =
• Terbukti bahwa penggunaan kontroler I menghilangkan error steady state!
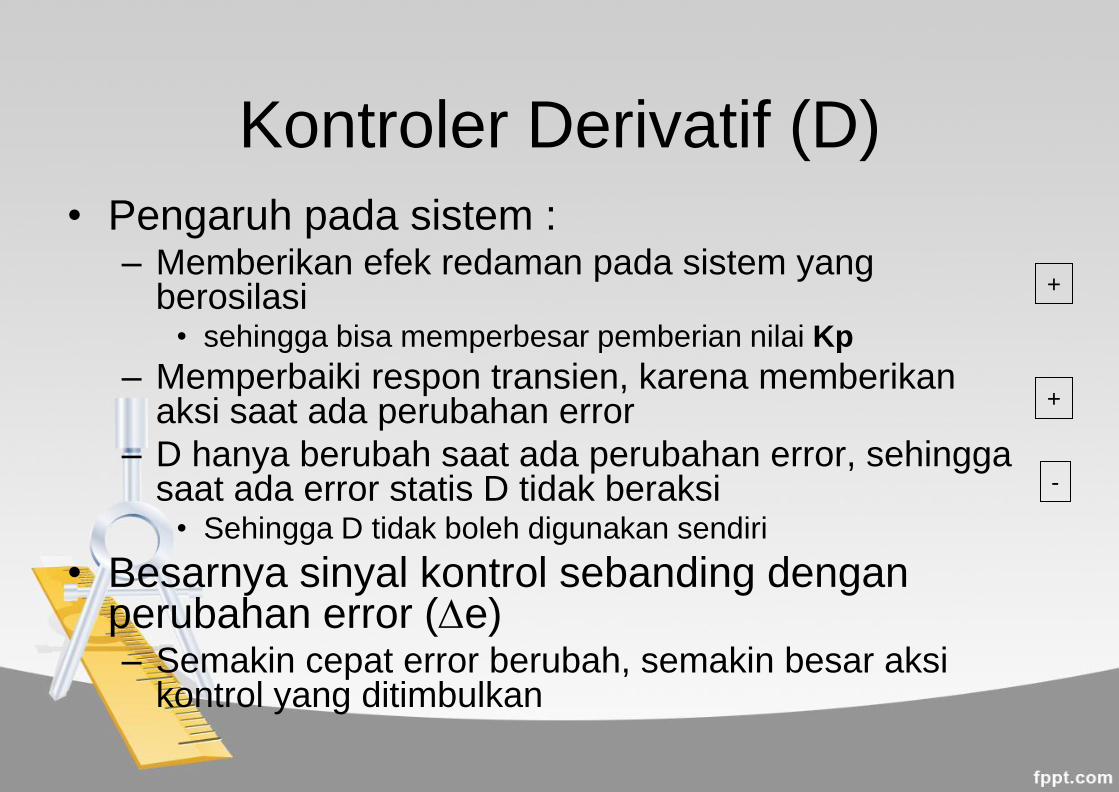
Kontroler Derivatif (D)
• Pengaruh pada sistem : – Memberikan efek redaman pada sistem yang
berosilasi • sehingga bisa memperbesar pemberian nilai Kp
– Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error
– D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi • Sehingga D tidak boleh digunakan sendiri
• Besarnya sinyal kontrol sebanding dengan perubahan error (e) – Semakin cepat error berubah, semakin besar aksi
kontrol yang ditimbulkan
+
+
-
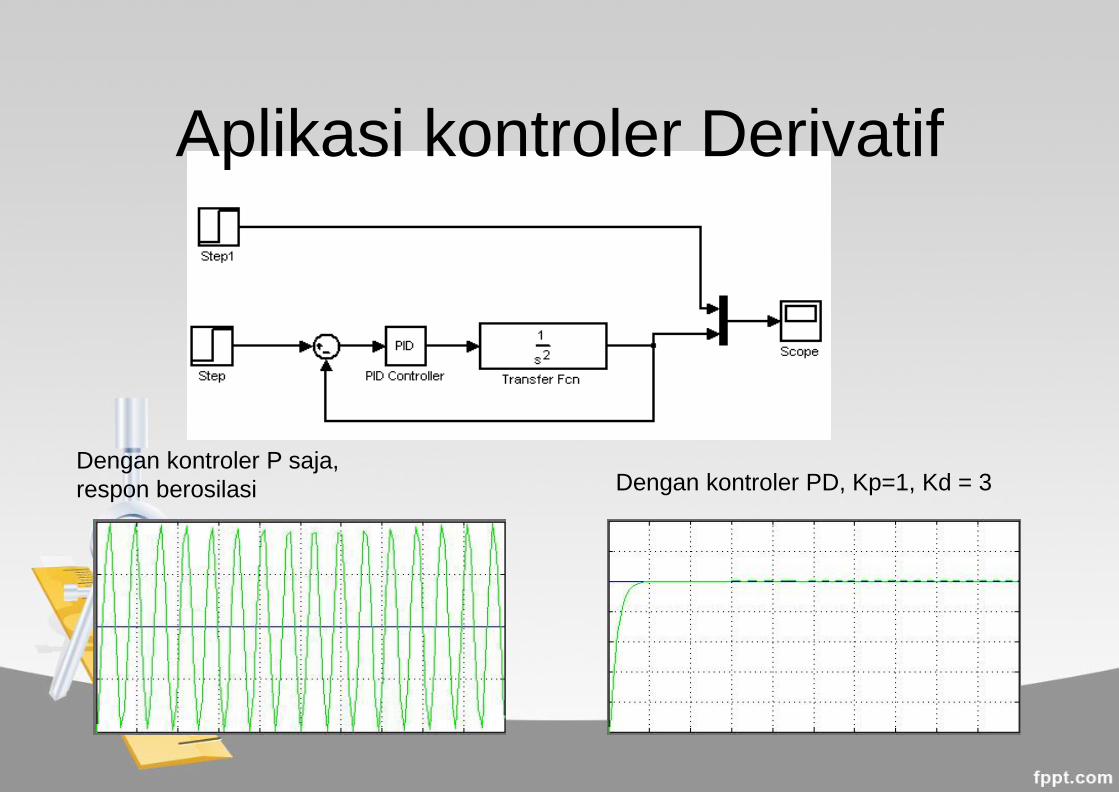
Aplikasi kontroler Derivatif
Dengan kontroler P saja,
respon berosilasi Dengan kontroler PD, Kp=1, Kd = 3

Aplikasi kontroler Derivatif
01
1
1
)(
)(
1)(
2
2
2
s
ssR
sC
ssG
• Perhitungan dari contoh tersebut :
01
1
1
)(
)(
1)(
2
2
2
ss
ss
s
sR
sC
s
ssG
Dengan kontroler P
Kp = 1
Dengan kontroler PD
Kp = 1, Kd=1
TF open loop
TF close loop
Persamaan
karakteristik
Akar persamaannya imajiner,
responnya berosilasi terus menerus
Akar persamaannya real negatif,
respon saat tak hingga = 0

Kontroler PID
• Kombinasi beberapa jenis kontroler diperbolehkan
– PI, PD, PID
• Keuntungan kontroler PID:
– Menggabungkan kelebihan kontroler P, I, dan D
• P : memperbaiki respon transien
• I : menghilangkan error steady state
• D : memberikan efek redaman

Tabel Respon PID terhadap
Perubahan konstanta parameter

Transfer Function PID

TERIMA KASIH
Recommended