SMART DUST
SMART DUSTK. Pister, J. Kahn, B. Boser
(UCB)S. Morris
(MLB)
MEMSMTO
DARPADARPA
SMART DUST
Goals
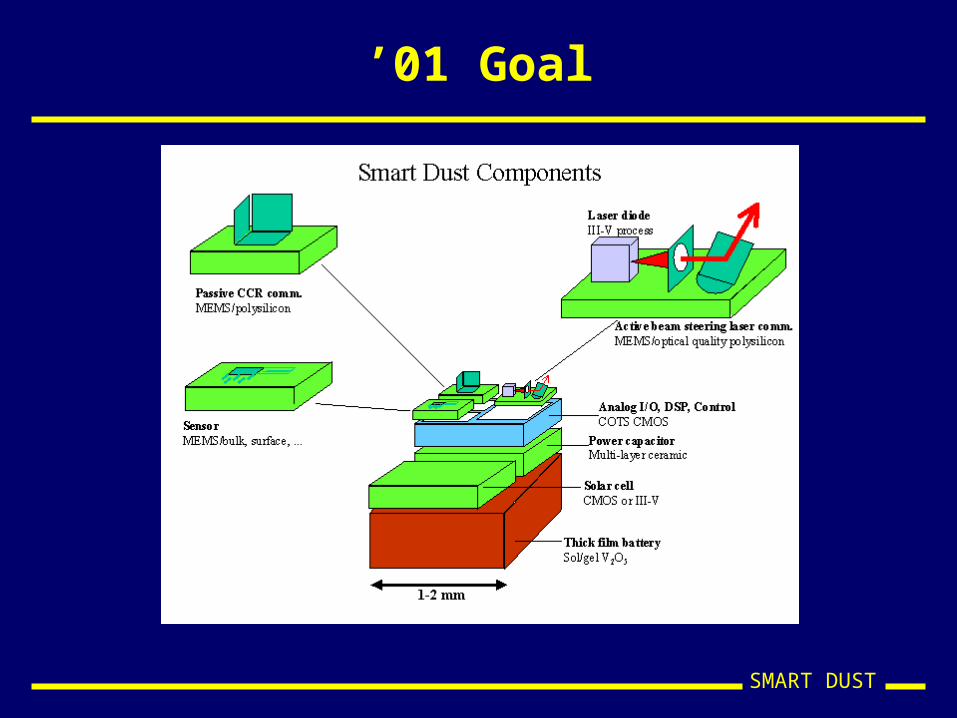
• Autonomous sensor node (mote) in 1 mm3
• MAV delivery
• Thousands of motes
• Many interrogators
• Demonstrate useful/complex integration in 1 mm3
SMART DUST
COTS Dust
GOALS:
• Create a network of sensors
• Explore system design issues
• Provide a platform to test Dust components
• Use off the shelf components
SMART DUST
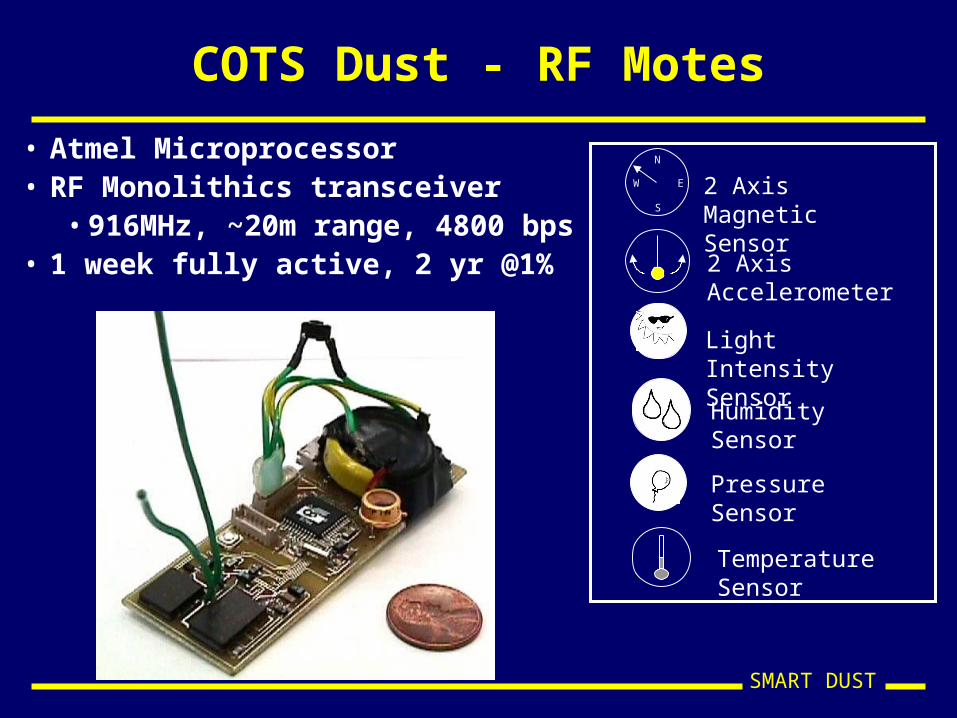
COTS Dust - RF Motes
• Atmel Microprocessor• RF Monolithics transceiver
• 916MHz, ~20m range, 4800 bps• 1 week fully active, 2 yr @1%
N
S
EW 2 Axis Magnetic Sensor
2 Axis Accelerometer
Light Intensity Sensor
Humidity Sensor
Pressure Sensor
Temperature Sensor
SMART DUST
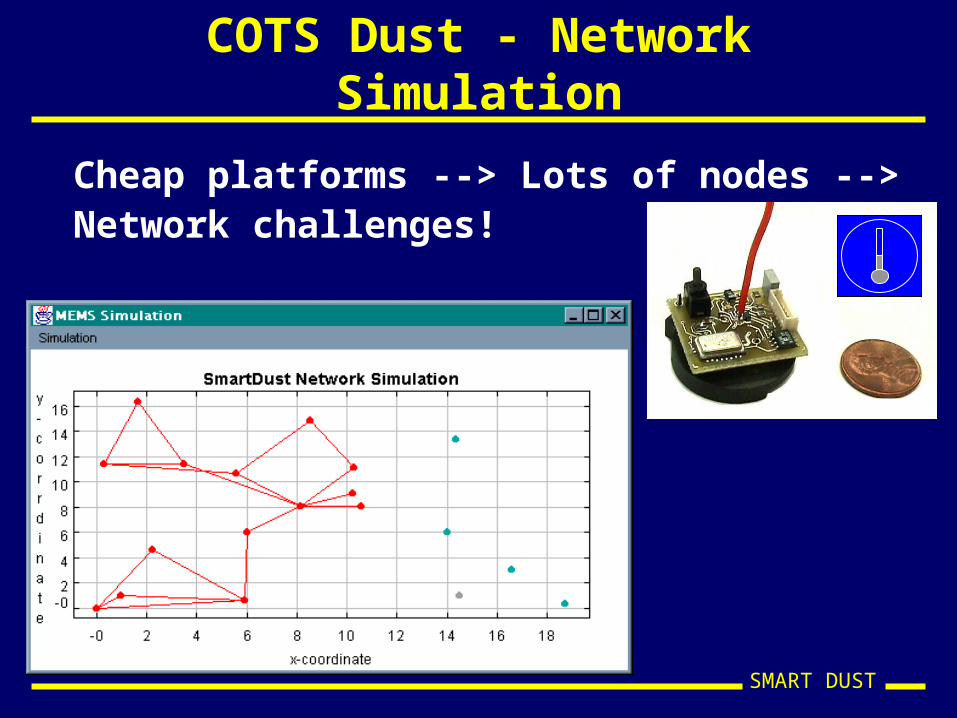
COTS Dust - Network Simulation
Cheap platforms --> Lots of nodes -->Network challenges!
SMART DUST
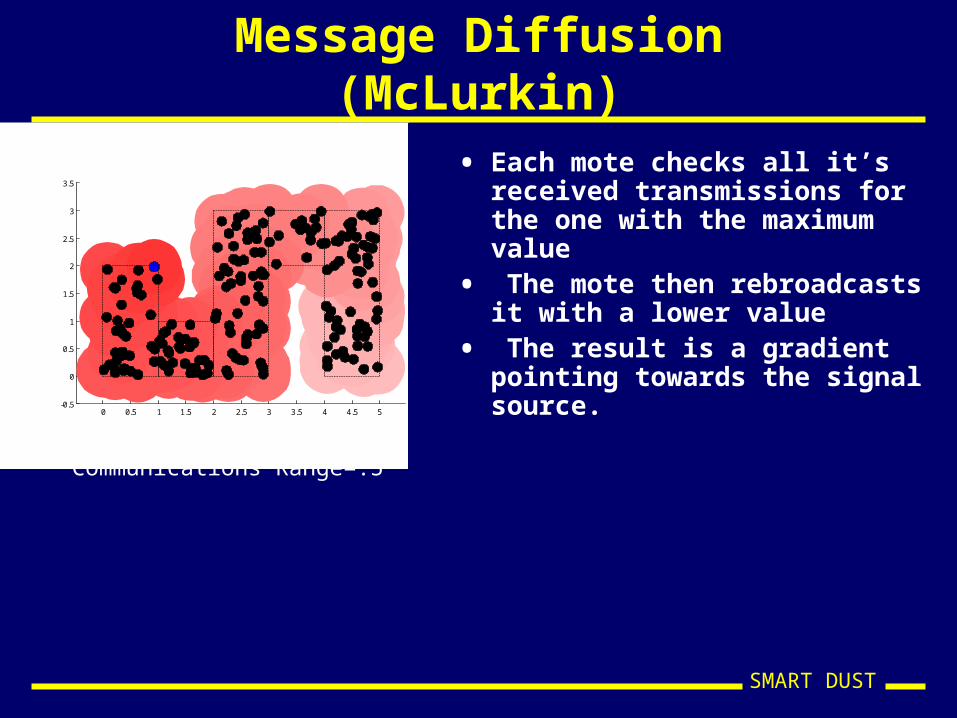
Message Diffusion (McLurkin)
• Each mote checks all it’s received transmissions for the one with the maximum value
• The mote then rebroadcasts it with a lower value
• The result is a gradient pointing towards the signal source.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Number Of Motes=200Communications Range=.5
SMART DUST
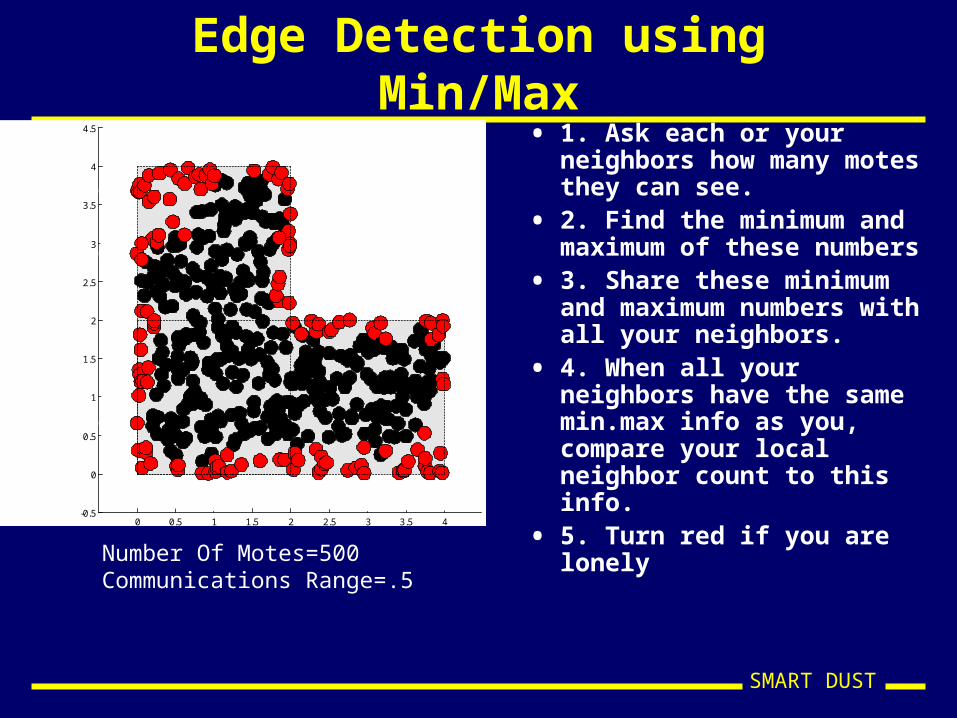
Edge Detection using Min/Max• 1. Ask each or your
neighbors how many motes they can see.
• 2. Find the minimum and maximum of these numbers
• 3. Share these minimum and maximum numbers with all your neighbors.
• 4. When all your neighbors have the same min.max info as you, compare your local neighbor count to this info.
• 5. Turn red if you are lonely0 0.5 1 1.5 2 2.5 3 3.5 4
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Number Of Motes=500Communications Range=.5
SMART DUST
0 1 2 3 4 5-1
0
1
2
3
4
5
6
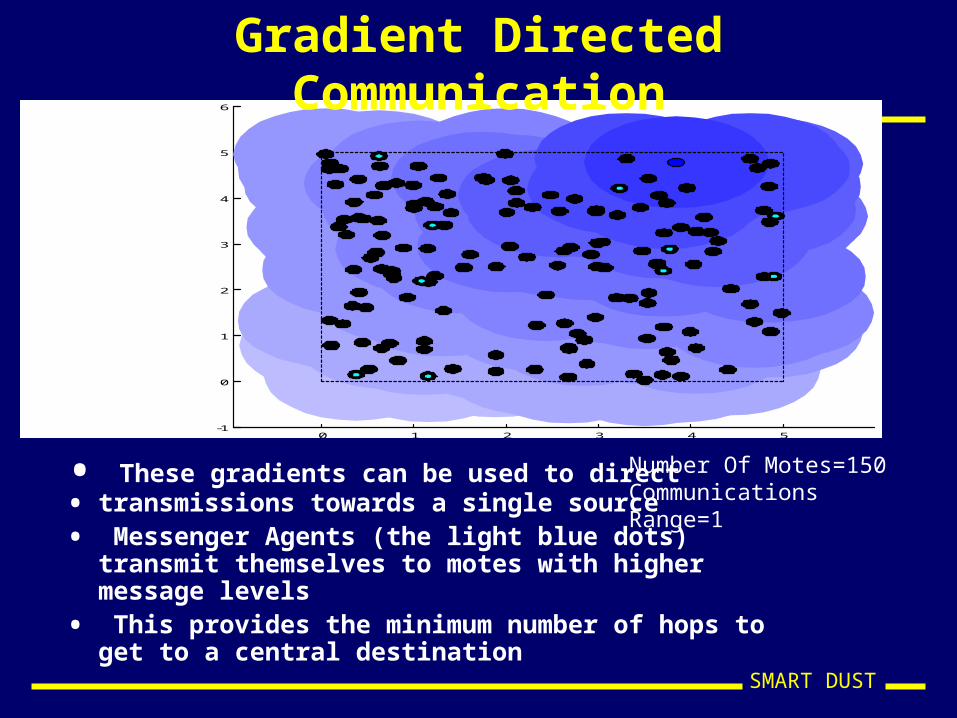
Gradient Directed Communication
• These gradients can be used to direct• transmissions towards a single source
• Messenger Agents (the light blue dots) transmit themselves to motes with higher message levels
• This provides the minimum number of hops to get to a central destination
Number Of Motes=150Communications Range=1
SMART DUST
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5-1
0
1
2
3
4
5
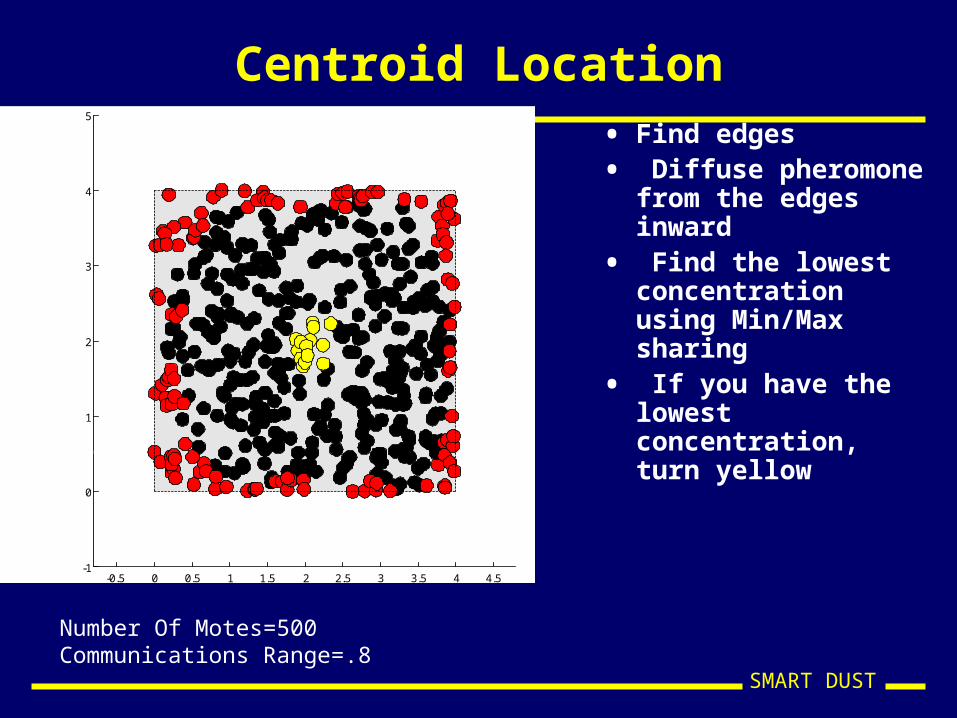
Centroid Location• Find edges
• Diffuse pheromone from the edges inward
• Find the lowest concentration using Min/Max sharing
• If you have the lowest concentration, turn yellow
Number Of Motes=500Communications Range=.8
SMART DUST
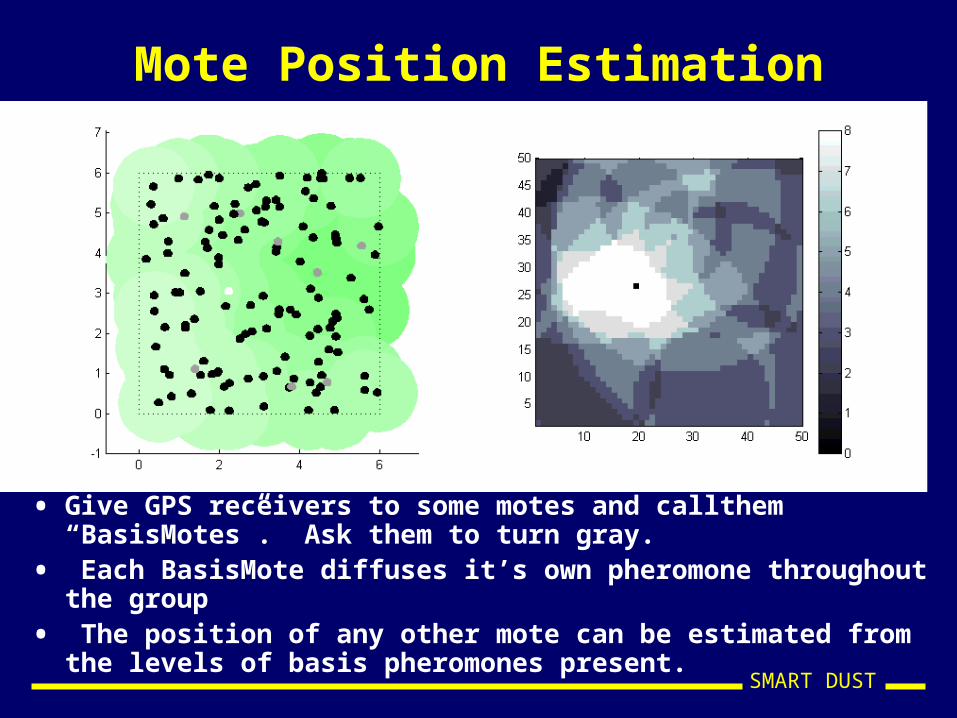
Mote Position Estimation
• Give GPS receivers to some motes and callthem “BasisMotes”. Ask them to turn gray.
• Each BasisMote diffuses it’s own pheromone throughout the group
• The position of any other mote can be estimated from the levels of basis pheromones present.
SMART DUST
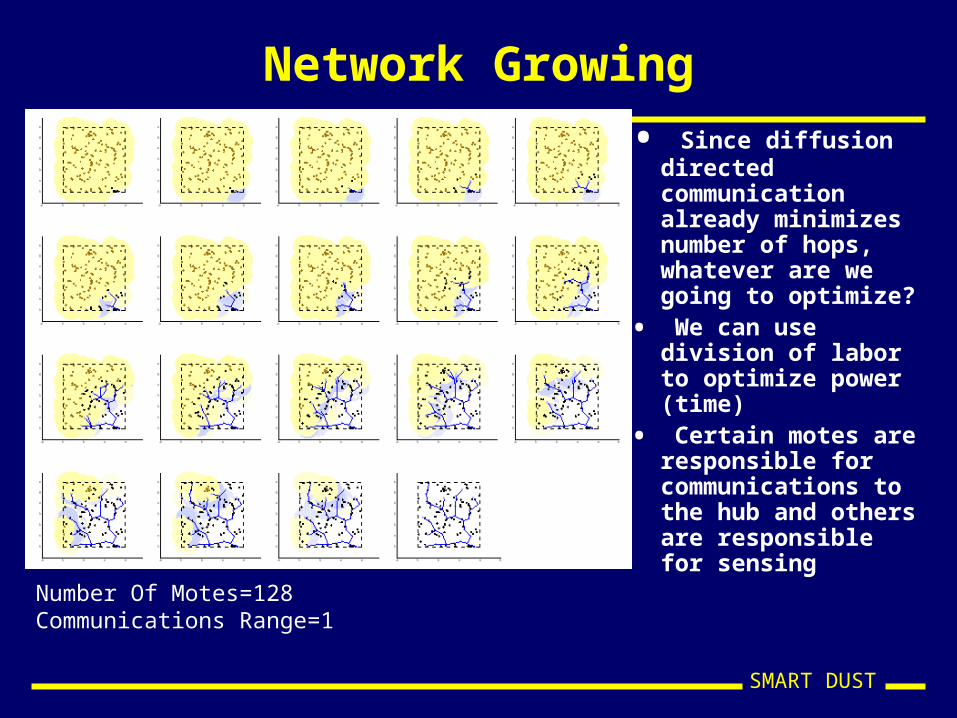
Network Growing
• Since diffusion directed communication already minimizes number of hops, whatever are we going to optimize?
• We can use division of labor to optimize power (time)
• Certain motes are responsible for communications to the hub and others are responsible for sensing
Number Of Motes=128Communications Range=1
SMART DUST
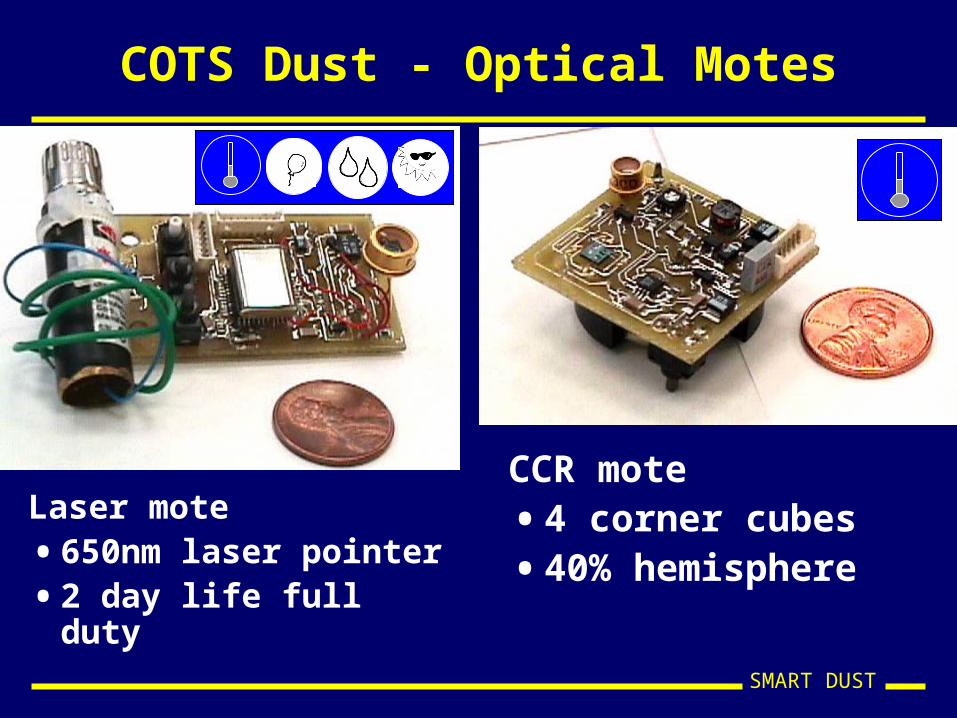
COTS Dust - Optical Motes
Laser mote
• 650nm laser pointer
• 2 day life full duty
CCR mote
• 4 corner cubes
• 40% hemisphere
SMART DUST
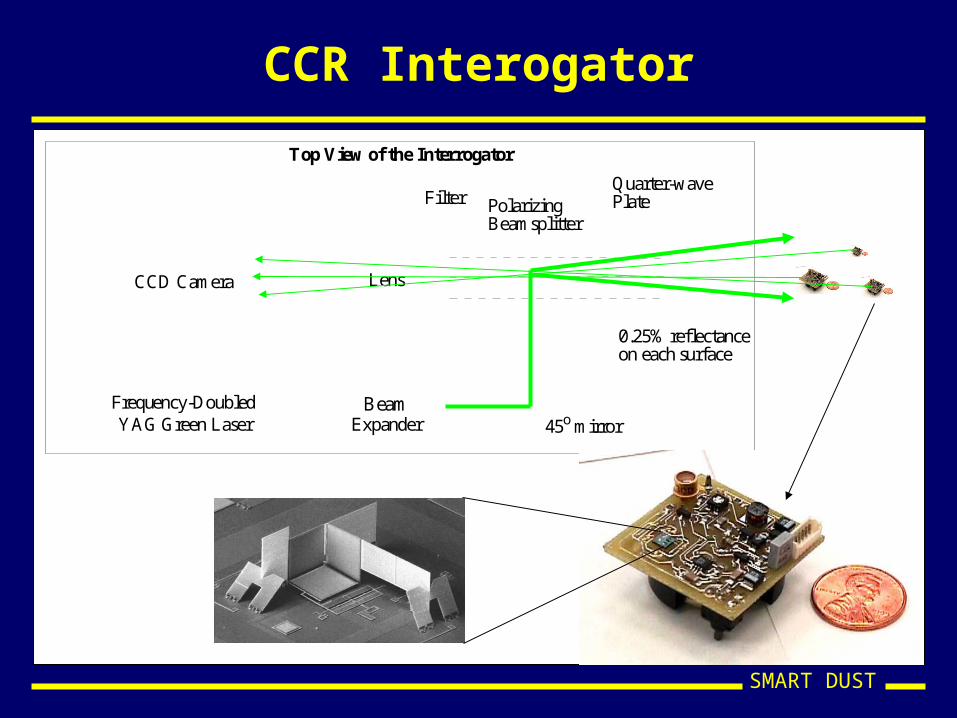
CCR Interogator
Top View of the Interrogator
CCD Camera Lens
Frequency-Doubled Beam45o mirror
Polarizing Beamsplitter
Quarter-wavePlateFilter
0.25% reflectance on each surface
YAG Green Laser Expander
SMART DUST
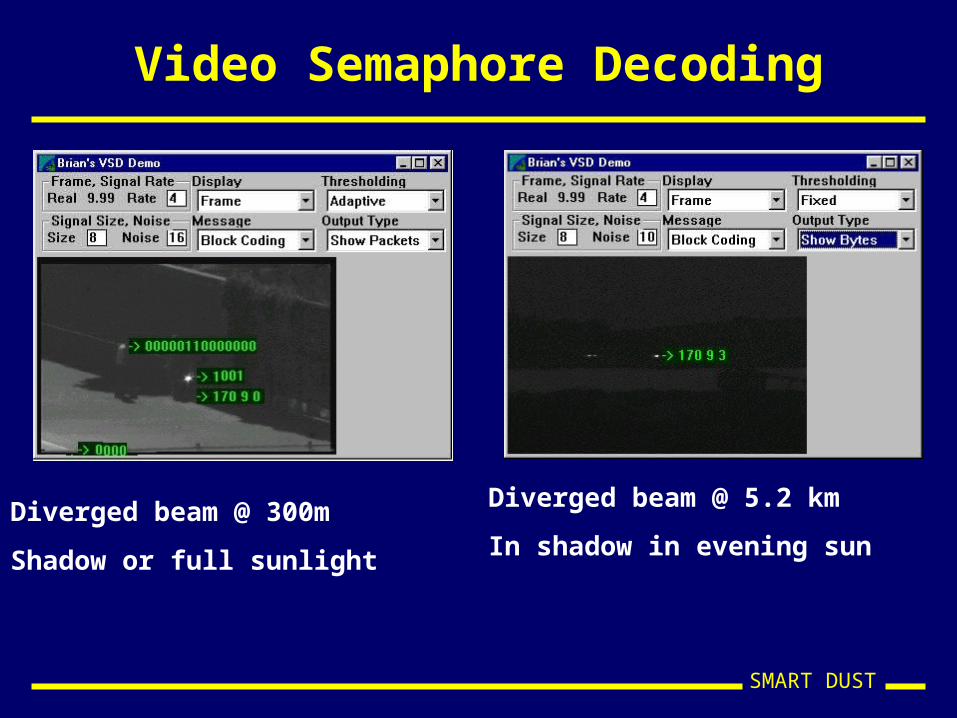
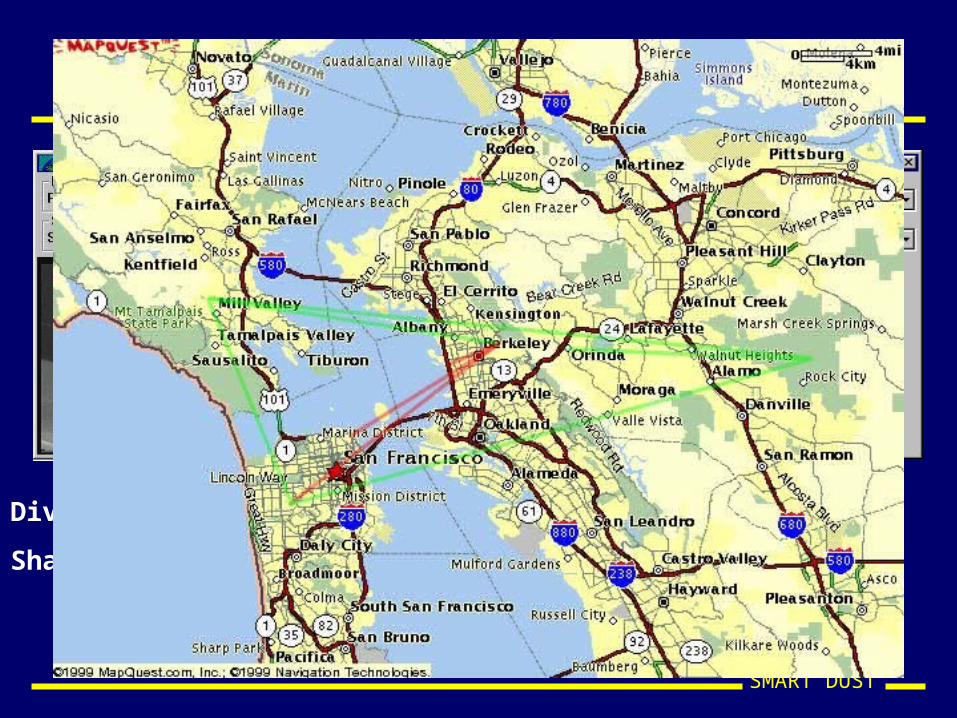
Video Semaphore Decoding
Diverged beam @ 300m
Shadow or full sunlight
Diverged beam @ 5.2 km
In shadow in evening sun
SMART DUST
Video Semaphore Decoding
Diverged beam @ 300m
Shadow or full sunlight
Diverged beam @ 5.2 km
In shadow in evening sun
SMART DUST
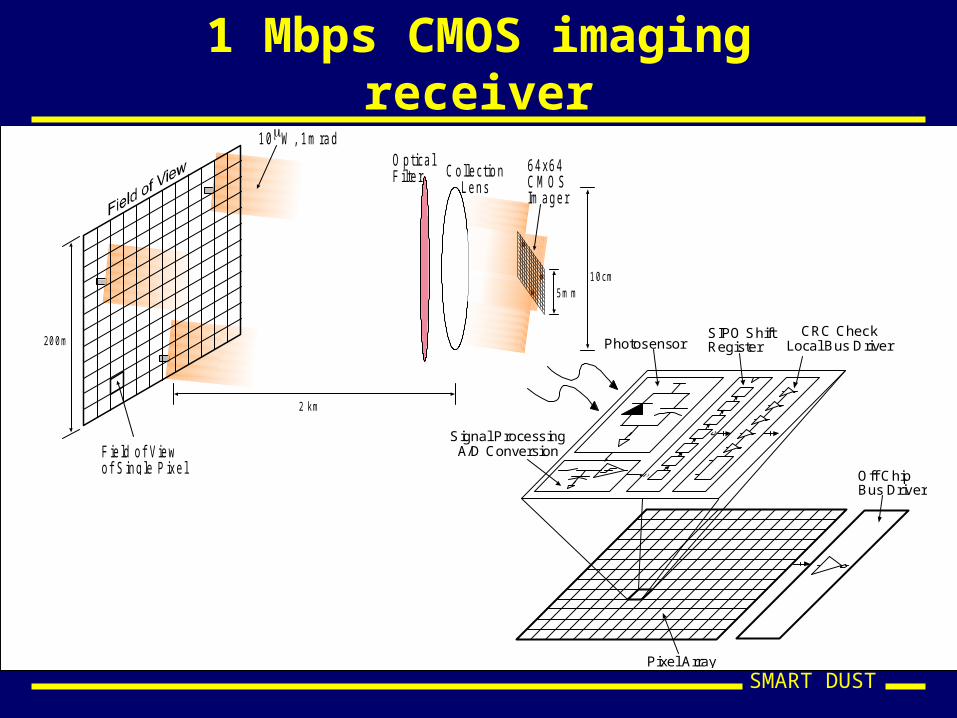
1 Mbps CMOS imaging receiver
1 0 cm
20 0 m
F ield of Viewof S ingle P ixel
5 m m
2 k m
CollectionLens
OpticalF ilter
64x64CMOSImager
10W, 1mrad
Photosensor
Signal ProcessingA/D Conversion
SIPO ShiftRegister
CRC CheckLocal Bus Driver
Off ChipBus Driver
Pixel Array
SMART DUST
Optical Communication (vs. RF)
• Pro:• low power• small aperture• spatial division multiplexing• high data rates• LPI/LPD• baseband coding
• Con:• line of sight• atmospheric turbulence
SMART DUST
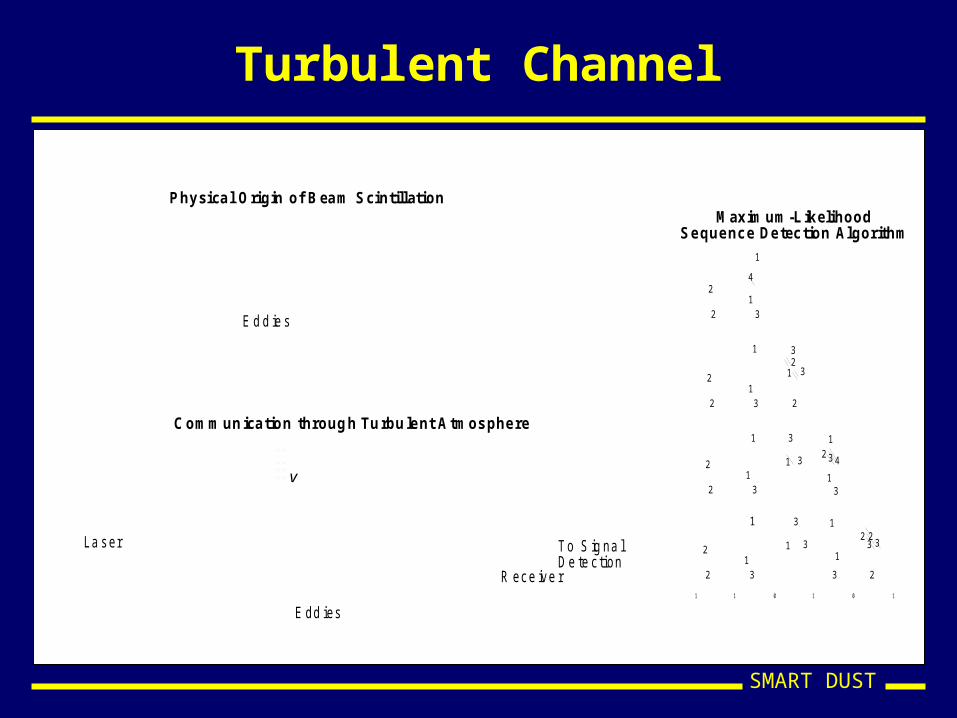
Turbulent Channel
La ser
R ece ive r
v
C omm un ica tion throug h Tu rbu le nt A tmos phe re
To S ig na l
Edd ies
De te ction
M ax im um-L ik elihood
0 11 1 0 1
2
2
1
4
13
2
2
1
13
2
2
1
13
2
2
1
13
3
2
21 3
3
1 3
1234
13
13
311
3
23
23
2
Se que nc e De tec tion Algorithm
Phy sica l Origin of B ea m Scintillation
Ed d ie s
SMART DUST
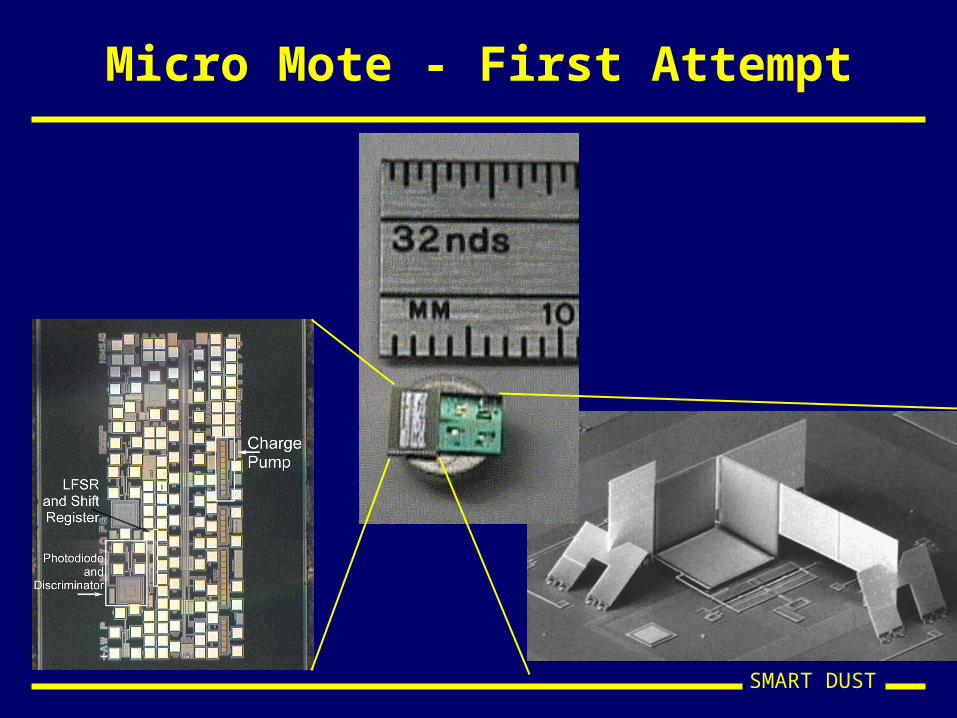
Micro Mote - First Attempt
SMART DUST
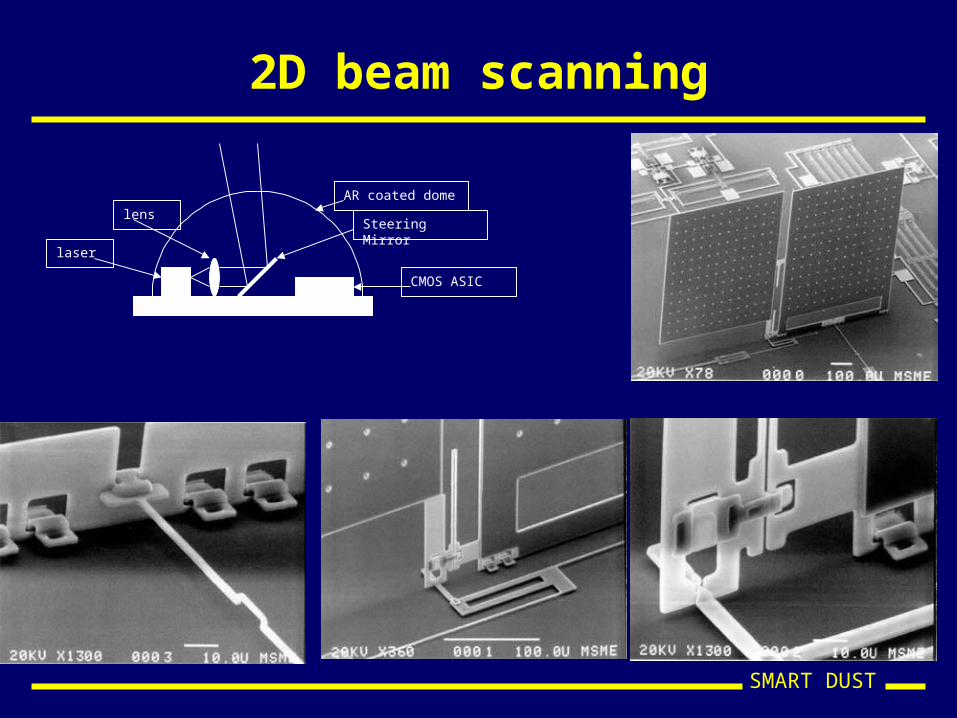
2D beam scanning
laser
lens
CMOS ASIC
Steering Mirror
AR coated dome
SMART DUST
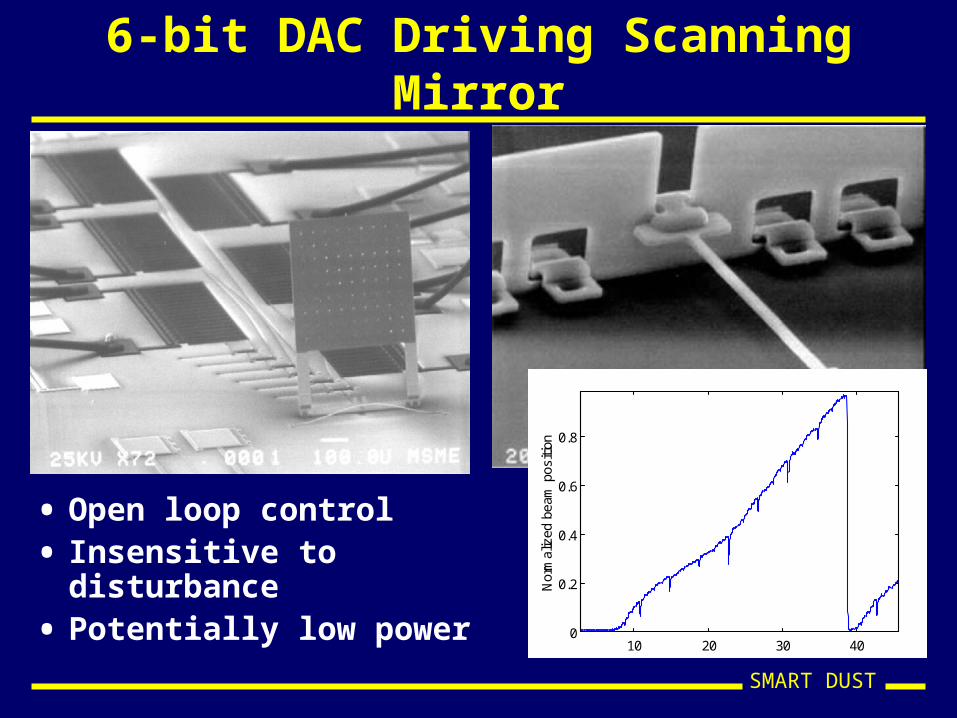
6-bit DAC Driving Scanning Mirror
10 20 30 400
0.2
0.4
0.6
0.8
Time (seconds)
Nor
mal
ized
bea
m p
ositi
on
• Open loop control
• Insensitive to disturbance
• Potentially low power
SMART DUST
Power and Energy
• Sources• Solar cells• Thermopiles
• Storage• Batteries ~1 J/mm3
• Capacitors ~1 J/mm3
• Usage• Digital control: nW• Analog circuitry: nJ/sample• Communication: nJ/bit
SMART DUST
’01 Goal

SMART DUST
MAV Delivery
• 60 mph
• 18 min
• 1 mi comm
Built by MLB Co.
SMART DUST
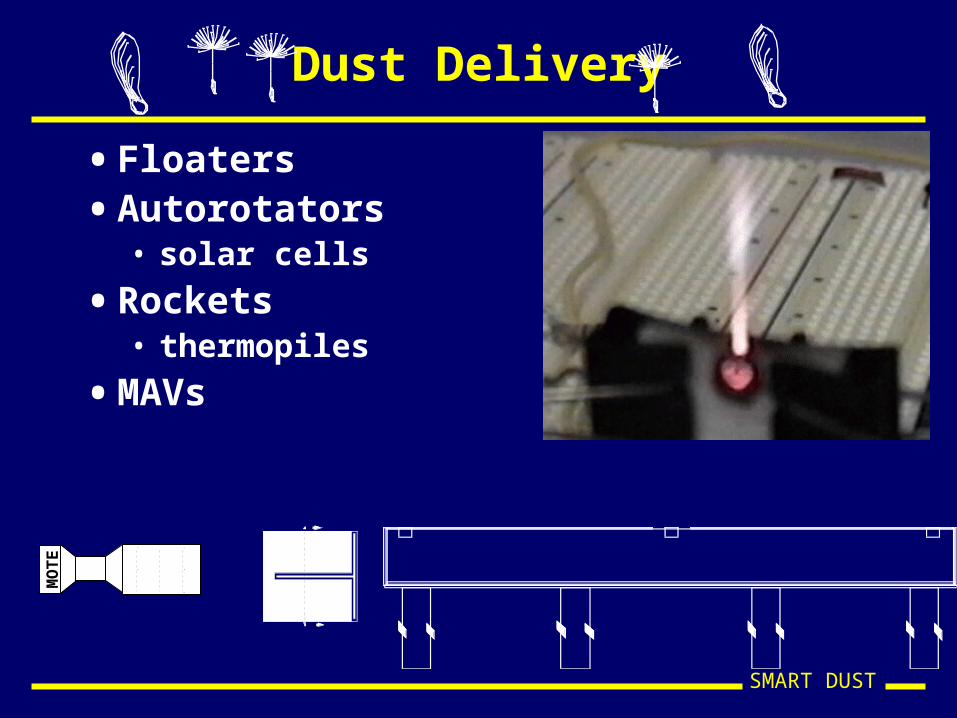
Dust Delivery
• Floaters
• Autorotators• solar cells
• Rockets• thermopiles
• MAVs
LO
AD
MO
TE

SMART DUST
Micro Flying Insect
• ONR MURI/ DARPA funded
• year 1 of 5 year project
• Dickinson, Fearing (PI), Liepmann, Majumdar, Pister, Sands, Sastry
• Heavily leveraged on Smart Dust
SMART DUST
Applications
• DoD• Battlefield sensor networks• Sensor mine-fields, burrs and fleas• Traffic mapping• Captured terrain surveillance• Bunker mapping• ...
• Civilian• High speed/low power IRDA• Interactive virtual ballet• ...
SMART DUST
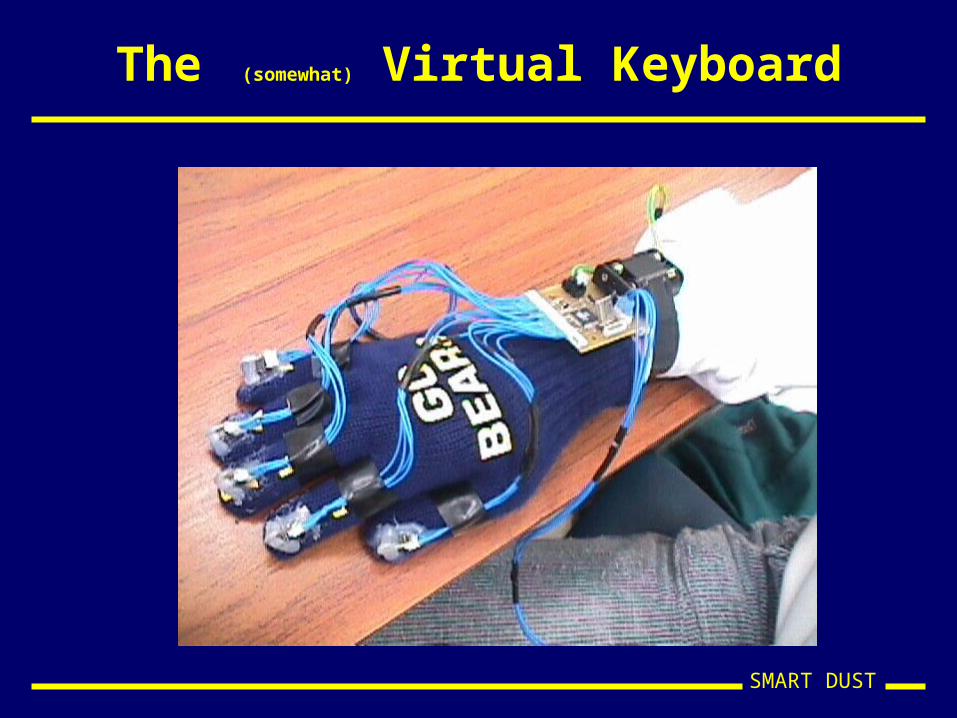
The (somewhat) Virtual Keyboard
SMART DUST
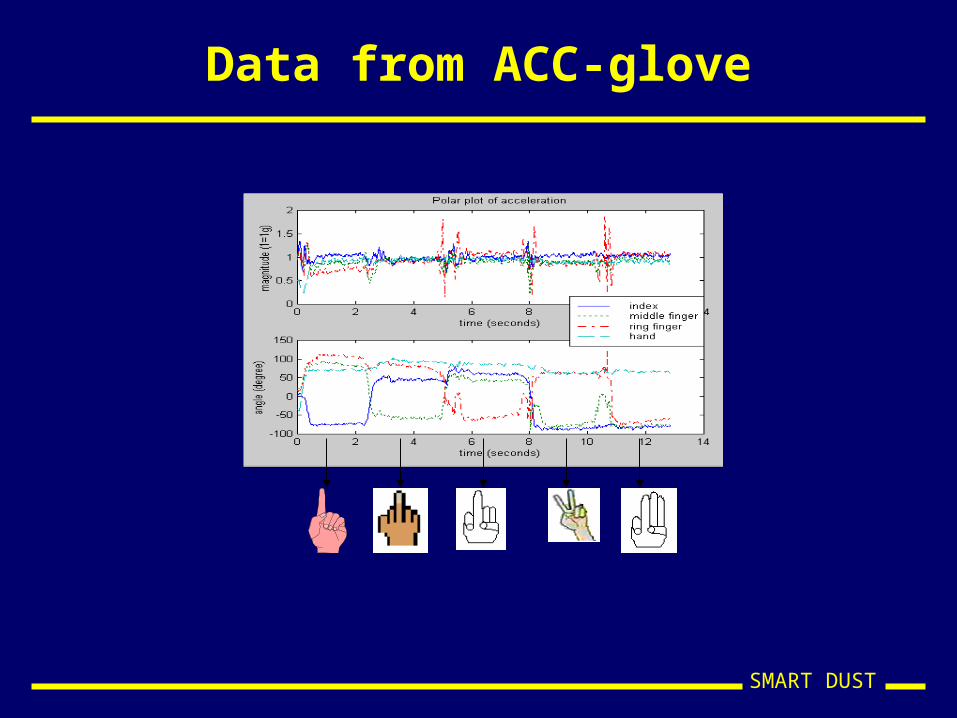
Data from ACC-glove
SMART DUST
Conclusion
• Cubic inch motes off-the-shelf, ~$100• Dec ’99: 100 node network in Soda/Cory• Desperately need intelligent software
• Millimeter-scale motes• Dec ’00: first working prototypes• Don’t have a clue what we need in software
Recommended