
TEMA 5. MODELADO GEOMÉTRICO Y CINEMÁTICO DEL ROBOT
ROBÓTICA

ÍNDICEÍNDICE INTRODUCCIÓN CINEMÁTICA DE POSICION
CINEMÁTICA DIRECTA. É MODELO GEOMÉTRICO
MATRICES DE TRANSFORMACIÓN HOMOGÉNEA (MTH) - ALGORITMO DE D-H
CINEMÁTICA INVERSA. MODELO GEOMÉTRICO MATRICES DE TRANSFORMACIÓN HOMOGÉNEA (MTH) - MÉTODO MATRICES DE TRANSFORMACIÓN HOMOGÉNEA (MTH) MÉTODO
ALGEBRAICO DESACOPLO CINEMÁTICO
CINEMÁTICA DE MOVIMIENTO CINEMÁTICA DE MOVIMIENTO ECUACIONES DE PROPAGACIÓN MATRIZ JACOBIANA
Jon Legarreta / Raquel Martinez
MATRIZ JACOBIANA
2

INTRODUCCIÓNINTRODUCCIÓN
CINEMÁTICA DE POSICION CINEMÁTICA DE MOVIMIENTO
Calculo de coordenadas articularesrespecto de la localizacion en el espacio yviceversa.
Calculo de velocidades angulares y lineales de losdistintos componentes del robot (articulaciones,eslabones etc…) respecto de velocidades articulares y
DIRECTA INVERSAECUACIONES
DE PROPAGACIÓNMATRIZ
JACOBIANA
viceversa.
DE PROPAGACIÓN(Directa e inversa)
q2
q3
?
?
d(q3)/dt
TCP ¿?(x,y,z,α,β,θ)
q1
TCP(x,y,z,α,β,θ)? TCP ¿?
d(x)/dt d(y)/dt
d(q2)/dt
Geométrico D-H Geométrico DesacoploAlgebraico
d(x)/dt, d(y)/dt ..
d(q1)/dt
Jon Legarreta / Raquel Martinez
g
3

INTRODUCCIÓNINTRODUCCIÓN
Un robot industrial esta destinado a realizar una funcióncon una herramienta determinada.
Para ello es necesario localizar (posicionar y orientar) elterminal del robot en cada instante.
La localización del terminal repercute en eli i t d l t d ti l imovimiento del resto de sus articulaciones.
Jon Legarreta / Raquel Martinez4

CINEMÁTICA DE POSICIÓNCINEMÁTICA DE POSICIÓN
L i áti d l b t t di l i i t d lLa cinemática del robot estudia el movimiento delmismo con respecto a un sistema de referencia fijosin considerar las fuerzas y momentos que originansin considerar las fuerzas y momentos que originandicho movimiento.
Busca las relaciones entre la localización (posición yorientación) del extremo del robot y los valores de sus
d d ti lcoordenadas articulares. Busca las relaciones entre las velocidades del
movimiento de las articulaciones y el extremo (modelomovimiento de las articulaciones y el extremo (modelodiferencial – matriz Jacobiana).
Jon Legarreta / Raquel Martinez5

CINEMÁTICA DE POSICIÓNCINEMÁTICA DE POSICIÓN
Cinemática DIRECTA Cinemática INVERSADetermina la localización delextremo del robot, con Conocida la localización del
b t d t i l d brespecto a un sistema decoordenadas de referencia,conocidos los valores de las
robot, determina cual debe serla configuración del robot(articulaciones y parámetrosgeométricos)articulaciones y los parámetros
geométricos de los elementosdel robot.
geométricos).
Desde el punto de vista de la robótica, el problemap , pcinemático inverso es más complejo.
Jon Legarreta / Raquel Martinez6

CINEMÁTICA DE POSICIÓNCINEMÁTICA DE POSICIÓN
Cinemática DIRECTAValores de las coordenadas
ti l
Localización del extremo
Cinemática INVERSA
articulares
(q1, q2, ….qn)
del robot
(x,y,z,α,β,ϒ)Cinemática INVERSA(q1, q2, qn)
f ( ) f ( )x=fx(q1, q2, ….qn)y=fy(q1, q2, ….qn)
………….ϒ f ( )
q1=f1(x,y,z,α,β,ϒ)q2=f2(x,y,z,α,β,ϒ)
…………….ϒ =fϒ(q1, q2, ….qn) qn=fn(x,y,z,α,β,ϒ)
Jon Legarreta / Raquel Martinez7

CINEMÁTICA DE POSICIÓN DIRECTACINEMÁTICA DE POSICIÓN DIRECTA
Formas de abordar el problema cinemático directo:
Métodos geométricos Método no sistemático (aplicación limitada a robots con pocos grados
de libertad)de libertad). Utiliza relaciones geométricas para obtener directamente la posición
del extremo del robot en función de las variables articulares.R i b i ió i l Requiere buena visión espacial
Mét d b d bi d i t d f iMétodos basados en cambios de sistemas de referencia Método sistemático (Adopta determinadas convenciones para
resolver el modelo, independientemente de las característicasgeométricas del robot).
Utiliza las matrices de transformación homogénea => Método deDenavit Hartenberg (1955)
Jon Legarreta / Raquel Martinez8

CINEMÁTICA DIRECTA MÉTODO GEOMÉTRICOCINEMÁTICA DIRECTA: MÉTODO GEOMÉTRICO Es un método no sistemático que utiliza las relaciones geométricas
para obtener la posición del extremo del robotpara obtener la posición del extremo del robot. Normalmente se emplea para la obtención de la posición y no de la
orientación
Se usan en robots de pocos grados de libertad.
Para un brazo de 2 Gradosde Libertad
q2y
de LibertadL1 L2
q1x
Jon Legarreta / Raquel Martinez9

CINEMÁTICA DIRECTA MTHCINEMÁTICA DIRECTA: MTH
Un robot se puede considerar como una cadenapcinemática formada por objetos rígidos (eslabones)unidos entre sí por articulaciones.
Si se establece un sistema de referencia fijo en la base del roboty se describe la localización de cada eslabón con respecto adicho sistema de referenciadicho sistema de referencia.
Se puede encontrar una matriz de transformación homogénea Tque: Será función de las coordenadas articulares. Será función de las coordenadas articulares. Relacione la localización del extremo del robot respecto al sistema
de referencia fijo.
Jon Legarreta / Raquel Martinez10
CINEMÁTICA DIRECTA MTH
A cada eslabón se le asocia un sistema de referencia solidario.
CINEMÁTICA DIRECTA: MTH
Es posible representar las traslaciones y rotaciones relativas entre los
distintos eslabones.
La matriz representa la posición y orientación relativa entre los stmas
asociados a dos eslabones consecutivos del robot.
Aii1
La cadena cinemática del robot se puede representar parcial o totalmente,
concatenando las matrices A:
.
Existe un método sistemático para situar los sistemas de coordenadas
AAAAT iii12
312
01
0 .....
asociados a cada eslabón y obtener la cadena cinemática del robot.
Método de Denavit-Hatenberg (1955).
Jon Legarreta / Raquel Martinez11

CINEMÁTICA DIRECTA MTH
Asignación de sistemas de referencia
CINEMÁTICA DIRECTA: MTH
• Seguir las reglas de D-H.Asignación de sistemas de referencia
Identificación de los parámetros D-H
Algoritmo • Tabla: i, di, ai, i.
Identificación de los parámetros D H
Obtención de las matricesDenavit-Hartenberg: • Para cada fila de la tabla anterior.
Obtención de las matrices
iSaiiiCSiiCCiSiCaiiSiSiSiCiC
M t i d l li ió d l
10000
1
diiCiSiSaiiiCSiiCCiS
Aii
• …extremo del robot respecto a la base.
Matrices de localización del….
AAAAT i 12100
Jon Legarreta / Raquel Martinez12
AAAAT iii12
312
01
0 .....

CINEMÁTICA DIRECTA MTHAlgoritmo D-H:
Asignación de Sistemas de ReferenciaEjemplo:
Modelado cinematico
CINEMÁTICA DIRECTA: MTH
Asignación de Sistemas de Referencia
D-H1: Numerar los eslabones desde 1 hastan (n=GLD) Se numerará como elemento 0 la
Modelado cinematicodirecto robot cilindrico
(4GDL)n (n=GLD). Se numerará como elemento 0 labase del robot.
D-H2: Numerar cada articulación desde 1
2 d3
D H2: Numerar cada articulación desde 1hasta n.
D-H3: Localizar los ejes de las articulaciones.1
3 4d2 4
jSi ésta es rotativa, el eje será el propio eje degiro. Si es prismática, será el eje a lo largo delcual se produce el desplazamiento.
ccc0
cc
cc
1
Jon Legarreta / Raquel Martinez13

CINEMÁTICA DIRECTA MTHAlgoritmo D-H:
Asignación de Sistemas de Referencia Ejemplo: Modelado cinematico
CINEMÁTICA DIRECTA: MTH
Establecer el sistema de referencia de cada elemento i
D-H4: Para i de 0 a n-1, situar el eje Zi sobre el eje dela articulación i+1.
Modelado cinematicodirecto robot cilindrico
(4GDL)d
D-H5: Situar el origen del sistema base So en cualquierpunto del eje Z0 (eje de la articulacion 1). Los ejes X0e Y0 se situarán de modo que formen un sistemadextrógiro con Z0
2 d3 L4
D-H6: Para i de 1 a n-1, situar el sistema Si (solidario alelemento i) en la intersección del eje Zi con la líneanormal común a Zi-1 y Zi. Si ambos ejes se cortasense situaría Si en el punto de corte. Si fuesen paralelosse situaría en la articulación i+1.
13
4d2
D-H7: Situar Xi en la línea normal común al eje Zi-1y Zi.Si los ejes se cortan se sitúa perpendicular al planoformado por Zi-1y Zi. Situar Xi en la línea normal al ejeZi-1, lo corta y apunta hacia afuera de él
D H8 Sit Yi d d f i t d t ó i
ccc0
cc
cc
Z0
Z1
L1
D-H8: Situar Yi de modo que forme un sistema dextrógirocon Xi y Zi
D-H9: Situar el sistema {Sn} en el extremo del robot demodo que Zn coincida con la dirección de Zn-1 y Xnsea normal a Zn-1 y Zn.
Jon Legarreta / Raquel Martinez
sea normal a Zn 1 y Zn.
14

CINEMÁTICA DIRECTA MTHAlgoritmo D-H:
Asignación de Sistemas de Referencia Ejemplo: Modelado cinematico
CINEMÁTICA DIRECTA: MTH
Establecer el sistema de referencia de cada elemento i
D-H4: Para i de 0 a n-1, situar el eje Zi sobre el eje dela articulación i+1.
Modelado cinematicodirecto robot cilindrico
(4GDL)d
D-H5: Situar el origen del sistema base So encualquier punto del eje Z0 (eje de la articulacion 1).Los ejes X0 e Y0 se situarán de modo que formen unsistema dextrógiro con Z0.
2 d3 L4
D-H6: Para i de 1 a n-1, situar el sistema Si (solidario alelemento i) en la intersección del eje Zi con la líneanormal común a Zi-1 y Zi. Si ambos ejes se cortasense situaría Si en el punto de corte. Si fuesen paralelosse situaría en la articulación i+1.
13
4d2
D-H7: Situar Xi en la línea normal común al eje Zi-1y Zi.Si los ejes se cortan se sitúa perpendicular al planoformado por Zi-1y Zi. Situar Xi en la línea normal al ejeZi-1, lo corta y apunta hacia afuera de él
D H8 Sit Yi d d f i t d t ó i
ccc0
cc
cc
Z0Y0
Z1
L1
D-H8: Situar Yi de modo que forme un sistema dextrógirocon Xi y Zi
D-H9: Situar el sistema {Sn} en el extremo del robot demodo que Zn coincida con la dirección de Zn-1 y Xnsea normal a Zn-1 y Zn.
X0
Jon Legarreta / Raquel Martinez
sea normal a Zn 1 y Zn.
15

CINEMÁTICA DIRECTA MATRICES HOMOGÉNEASAlgoritmo D-H:
Asignación de Sistemas de Referencia Ejemplo: Modelado cinematico
CINEMÁTICA DIRECTA: MATRICES HOMOGÉNEAS
Establecer el sistema de referencia de cada elemento i
D-H4: Para i de 0 a n-1, situar el eje Zi sobre el eje dela articulación i+1.
Modelado cinematicodirecto robot cilindrico
(4GDL)d3
D-H5: Situar el origen del sistema base So encualquier punto del eje Z0 (eje de la articulacion 1).Los ejes X0 e Y0 se situarán de modo que formen unsistema dextrógiro con Z0.
2 X2 X
3X4
3L4
D-H6: Para i de 1 a n-1, situar el sistema Si (solidarioal elemento i) en la intersección del eje Zi con la líneanormal común a Zi-1 y Zi. Si ambos ejes se cortasense situaría Si en el punto de corte. Si fuesen paralelosse situaría en la articulación i+1.
13
4Y1
d2
D-H7: Situar Xi en la línea normal común al eje Zi-1yZi. Si los ejes se cortan se sitúa perpendicular al planoformado por Zi-1y Zi. Situar Xi en la línea normal al ejeZi-1, lo corta y apunta hacia afuera de él.D H8 Sit Yi d d f i t
ccc0
cc
cc
Z0
X
Y0
Z1 X1
1
L1
D-H8: Situar Yi de modo que forme un sistemadextrógiro con Xi y Zi.
D-H9: Situar el sistema {Sn} en el extremo del robotde modo que Zn coincida con la dirección de Zn-1 yXn sea normal a Zn-1 y Zn.
X0
Jon Legarreta / Raquel Martinez
Xn sea normal a Zn 1 y Zn.
16

CINEMÁTICA DIRECTA MTHAlgoritmo D-H:
Identificación parámetros D HEjemplo:
Modelado cinematico
CINEMÁTICA DIRECTA: MTH
Identificación parámetros D-H Crear una tabla con los parámetros de Denavit-
Hartenberg:
Modelado cinematicodirecto robot cilindrico
(4GDL)2 d3
D-H10: Obtener i como el ángulo que hay que giraren torno a Zi-1 para que Xi-1 y Xi queden paralelos.
D-H11: Obtener di como la distancia medida a lo largo
2
3
3L4X2
X3 X4
gde Zi-1, que habría que desplazar {Si-1} para que Xi yXi-a quedasen en el mismo plano.
D-H12:Obtener ai como la distancia medida a lo largode Xi (que ahora coincidiría con Xi 1) que habría que
13
4
c
d2
Z1
4Y1
T bl D Hde Xi (que ahora coincidiría con Xi-1) que habría quedesplazar el nuevo {Si-1} para que su origencoincidiese con {Si}.
D-H13:Obtener i como el ángulo que habría que girar( )
ccc0
cc
ccL1 Z0
X0
Y0
Z1X1
i di ai i1 1 L1 0 0º
Tabla D-H
entorno a Xi (que ahora coincidiría con Xi-1) para queel nuevo {Si-1} coincidiese totalmente con {Si}.
0
1
2 90º d2 0 90º3 0 d3 0 0º4 L 0 0º
Jon Legarreta / Raquel Martinez
4 4 L4 0 0º
17
CINEMÁTICA DIRECTA MTHAlgoritmo D-H:
Formar las Matrices Homogéneas2 d3
L4X2
CINEMÁTICA DIRECTA: MTH
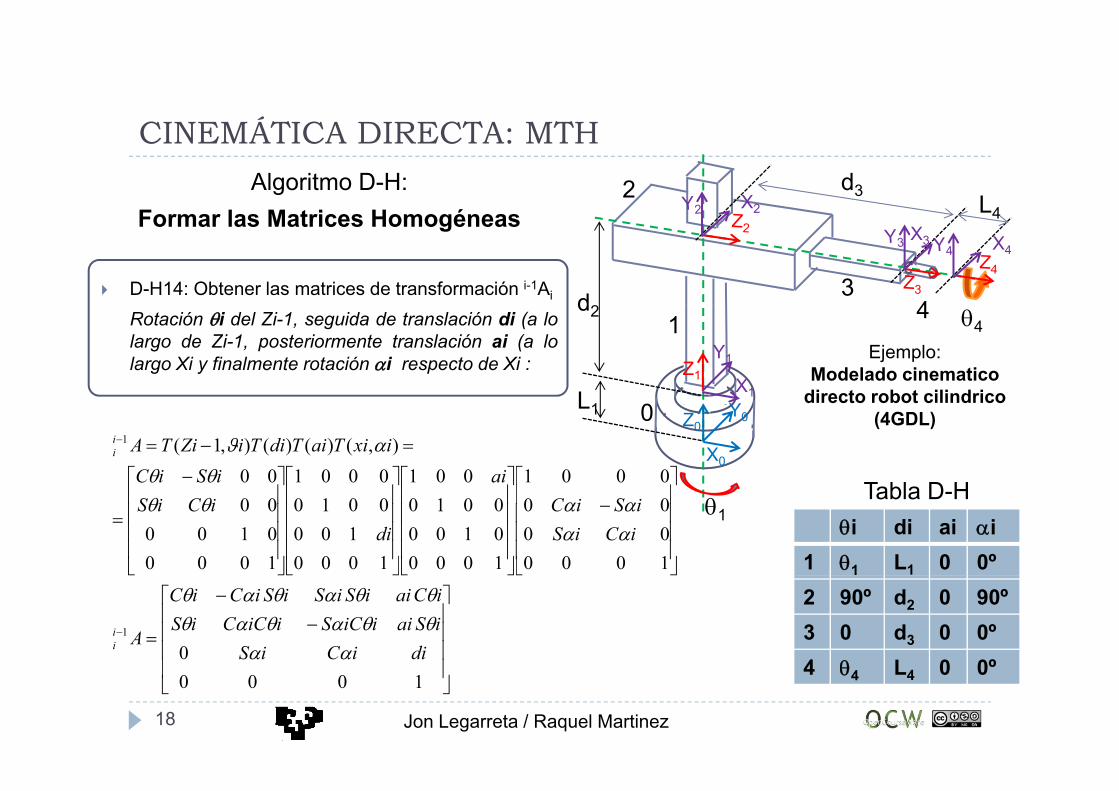
Formar las Matrices Homogéneas
D-H14: Obtener las matrices de transformación i-1Ai 34d2
4X3 X4
Rotación i del Zi-1, seguida de translación di (a lolargo de Zi-1, posteriormente translación ai (a lolargo Xi y finalmente rotación i respecto de Xi : Ejemplo:
Modelado cinematicodirecto robot cilindricoc
1 4
cccL
d2
Z1
4
X1
Y1
directo robot cilindrico(4GDL)
ccc0 c
cL1 Z0
X0
Y0
1
T bl D H
0001001000100),()()(),1(1
aiiSiCixiTaiTdiTiZiTAi
i
1i di ai i
1 1 L1 0 0º
Tabla D-H
10000000
100001000010
1000100
0010
1000010000
iCiSiSiC
diiCiS
2 90º d2 0 90º3 0 d3 0 0º4 L 0 0º
01
diiCiSiSaiiiCSiiCCiSiCaiiSiSiSiCiC
Aii
Jon Legarreta / Raquel Martinez
4 4 L4 0 0º
1000
18

CINEMÁTICA DIRECTA MTHAlgoritmo D-H: Formar las Matrices Homogéneas Tabla D-H
CINEMÁTICA DIRECTA: MTH
i di ai i
1 1 L1 0 0º
2 90º d2 0 90º
3 0 d3 0 0º
01
diiCiSiSaiiiCSiiCCiSiCaiiSiSiSiCiC
Ai
i
3 0 d3 0 0
4 4 L4 0 0º
1000
00110011
CSSC
00010100
00100001
00440044
CSSC
100011000011
0
1 LCS
A
100020100001
1
2 dA
100031000010
2
3 dA
100041000044
3
4 LCS
A
D-H15: Obtener la matriz de transformación que relaciona el sistema de la base con el del extremodel robot 0T4 = 0A1
1A22A3
3A4.
)43(114141 LdCCSSCS La matriz T define la
100012044)43(14141)43(114141
34
23
12
01
04 LdCS
LdSiSSCCCLdCCSSCS
AAAAT
La matriz T define la
orientación y posicióndel extremo referido a labase en función de las n
Jon Legarreta / Raquel Martinez
1000 coordenadas articulares.
19
CINEMÁTICA DE POSICIÓN INVERSACINEMÁTICA DE POSICIÓN INVERSA
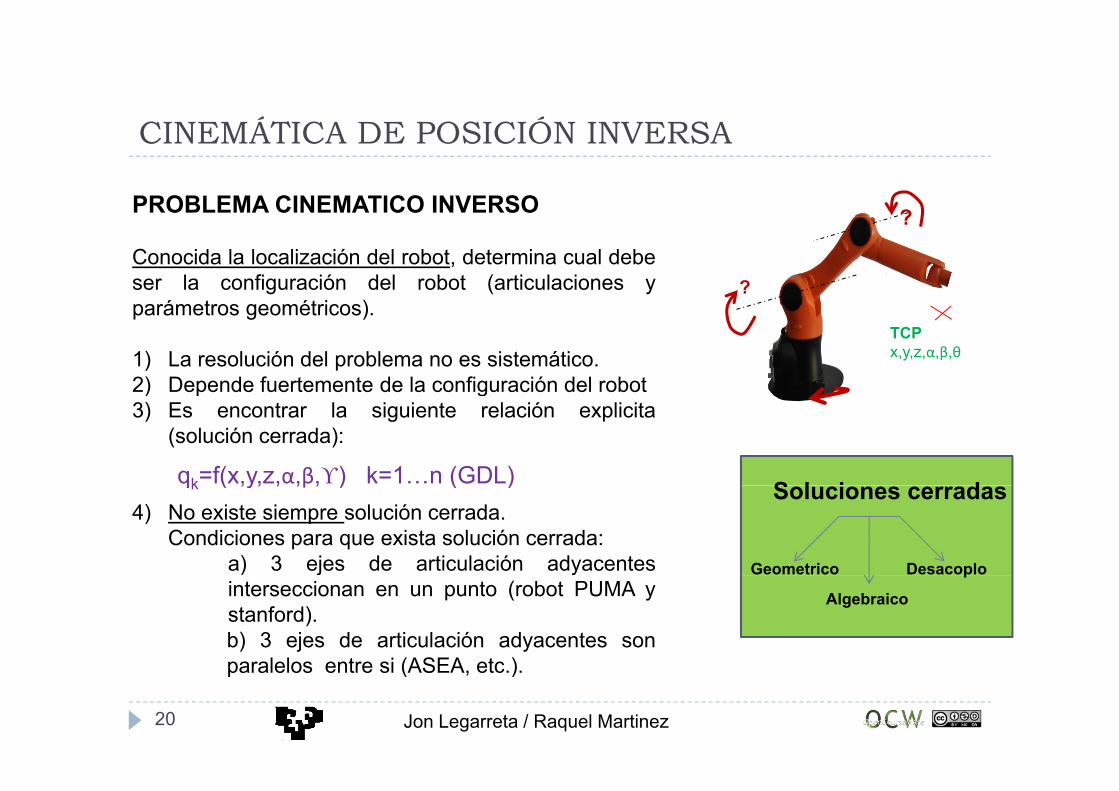
PROBLEMA CINEMATICO INVERSO ?
Conocida la localización del robot, determina cual debeser la configuración del robot (articulaciones yparámetros geométricos)
?
?
parámetros geométricos).
1) La resolución del problema no es sistemático.2) Depende fuertemente de la configuración del robot
TCPx,y,z,α,β,θ
) p g3) Es encontrar la siguiente relación explicita
(solución cerrada):
qk=f(x,y,z,α,β,ϒ) k=1…n (GDL) S l i d4) No existe siempre solución cerrada.
Condiciones para que exista solución cerrada:a) 3 ejes de articulación adyacentes
qk ( ,y, , ,β, ) ( )
Geometrico Desacoplo
Soluciones cerradas
interseccionan en un punto (robot PUMA ystanford).b) 3 ejes de articulación adyacentes sonparalelos entre si (ASEA etc )
p
Algebraico
Jon Legarreta / Raquel Martinez20
paralelos entre si (ASEA, etc.).

CINEMÁTICA INVERSA: MÉTODO GEOMÉTRICOCINEMÁTICA INVERSA: MÉTODO GEOMÉTRICO
Se basan en descomponer la cadena cinemática en distintos planos geométricos y resolviendo por trigonometría cada plano Se trata de encontrar el numero suficiente de relaciones geométricas para
Datos: Px, Py, Pz donde se quiere situar el extremo del robot.
trigonometría cada plano. Se trata de encontrar el numero suficiente de relaciones geométricas para posicionar el extremo del robot. Se utiliza para las primeras articulaciones.
Ejemplo: Robot esférico 3 GDLEjemplo: Robot esférico 3 GDL
La articulación q2 tiene dos soluciones: (codo arriba y codo abajo):
q2
αq2
q1β q1 β
α
Jon Legarreta / Raquel Martinez21

CINEMÁTICA INVERSA: MATRICES HOMOGÉNEAS
Se basan en manipular las ecuaciones resultantes obtenidas a partir del modelo Cinematico Directo:
CINEMÁTICA INVERSA: MATRICES HOMOGÉNEAS
Esto es, despejar las n variables qi en función de los vectores n, o, a, p:
Utilizando las Matrices de Transformación Homogénea operamos de la siguiente forma:Utilizando las Matrices de Transformación Homogénea, operamos de la siguiente forma:
)(0
paonqqT
n
n
nn
qdepejamosAAATAAAAAT
121010
12
3
1
2
0
1
0
1000
),..,(1qqTnn
n
nn
nn
qdepejamosAATAAqdepejamosAAATA
2
12
3
010
1
11
2
1321
Consideraciones:
nn
n
nnqyqdepejamosATAA
1
1010
1
12
3
Consideraciones:Se trata de igualar elementos de ambos lados de cada ecuación, tomando los casos en los que solo aparezca una variable de articulación, empleando identidades trigonométricas y buscando divisiones en función de arco tangentes.
Jon Legarreta / Raquel Martinez22

CINEMÁTICA INVERSA: MATRICES HOMOGÉNEASCINEMÁTICA INVERSA: MATRICES HOMOGÉNEAS
Ejemplo: Robot esférico 3 GDLTabla D-H
i di ai i
Z3 Y3
X3
1 q1 L1 0 -90º2 q2 0 0 90º3 0 q3 0 0º
Y2
X Y
X1
Z1Z2
MTH:
qX2 Y1Z0
Y0
0101 SqCq
0202 SqCq
00100001
X0
1000101001010
1 LCqSqqq
A
100000100202
1
2
CqSqA
100031000010
2
3 qA
Jon Legarreta / Raquel Martinez23
1000 1000 1000

CINEMÁTICA INVERSA: MATRICES HOMOGÉNEAS
2100 AAAT
CINEMÁTICA INVERSA: MATRICES HOMOGÉNEASEjemplo: Robot esférico 3 GDL
000102020101 1 SqCqpaonSqCq 1
23
12
0101
3213
qdespejamosAATA
AAAT
n
px py pz DATOS (Posición del terminal)
1000310000100001
1000001002020202
10001000101001010101
0101 q
CqSqSqCq
paonpaonpaon
LCqSqSqCq
TAzzzz
yyyy
xxxx
n
1000100010001000
3220232202
11000011
CCSqSqSqCqpaon
LSqCq xxxx
1000001032202
1000100000111100010
1
qCqCqSqpaonpaon
CqSqL
TAzzzz
yyyyn
yy
yx
pq
pCSqCqpSqp arctan111011
Jon Legarreta / Raquel Martinez24
xx
y ppCq1

CINEMÁTICA INVERSA: MATRICES HOMOGÉNEASEjemplo: Robot esférico 3 GDL
201011 qyqdespejamosATAA
CINEMÁTICA INVERSA: MATRICES HOMOGÉNEAS
323312 qyqdespejamosATAA
0010
000111000011
01000022
0101
112
paonpaon
LSqCqSqCq
TAA yyyy
xxxx
n
10003100
100010000011
1000002212 qpaonCqSqCqSq zzzz
n
00012121212 paonSqLSqSqCqCqCq
100031000010
100010002121212
0111010
1
11
2 qpaonpaonp
CqLCqSqSqCqSqCqSq
qqqqqq
TAAzzzz
yyyy
xxxx
n
100010001000
111arctan2
111
2202122112
LPPySqPxCqq
LPPySqPxCq
CSqSqLPzSqCqPySqCqCqPx
112 LPzLPzCq
)11(2)1(2332121212 PySqPzCqSqLPzCqqqCqLPzCqPySqSqPzCqSq
Jon Legarreta / Raquel Martinez25

CINEMÁTICA INVERSA: DESACOPLO CINEMÁTICOCINEMÁTICA INVERSA: DESACOPLO CINEMÁTICO
Se basan en al resolución independiente de los grados de libertad que p g qposicionan (3) y de los que orientan la muñeca (3).Por lo que el problema cinemático inverso se divide en dos subproblemas:1. Resolver las tres primeras articulaciones de posición.2. Resolver las tres ultimas articulaciones que corresponden a la muñeca.
El método de resolución:
1) A partir de la posición y orientación que se busca [n o a p] se obtiene el punto1) A partir de la posición y orientación que se busca [n,o,a,p], se obtiene el punto de corte de los 3 últimos grados de libertad (punto de muñeca Pm).2) Se resuelve el problema cinemático inverso para el brazo de 3 GDL (q q q ) que llega hasta la Pm (desde la base)(q1,q2,q3) que llega hasta la Pm (desde la base).3) Se resuelve el problema cinemático inverso que va desde Pm hasta el punto final pf (calculando q4,q5,q6).
Jon Legarreta / Raquel Martinez26

CINEMÁTICA DE MOVIMIENTO MODELO DIFERENCIALCINEMÁTICA DE MOVIMIENTO: MODELO DIFERENCIAL
Hasta ahora se ha considerado únicamente las relaciones de las articulaciones de unamanera estática en ausencia de movimiento del robot (problemas Cinemático Directo emanera estática en ausencia de movimiento del robot (problemas Cinemático Directo eInverso).
Cuando el robot se desplaza, los elementos de la cadena cinemática propagan de unaarticulación a al siguiente tanto velocidades lineales como angularesarticulación a al siguiente tanto velocidades lineales como angulares.La velocidad del elemento i+1 será la del elemento i mas las componentes que añade laarticulación i+1.
Métodos de resoluciónMétodos de resoluciónModelo Diferencial
Propagación de velocidades
Cálculo Matriz Jacobiana
VelocidadesVelocidades
J bi DIRECTO
Velocidades de las
articulaciones
del extremo del robot
1
xEcuaciones de
Ecuaciones de Jacobiano DIRECTO
Jacobiano INVERSO
qn
21
zyde
revoluciónde
Translación
Jon Legarreta / Raquel Martinez27
qn

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANACINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANALa jacobiana es una matriz en derivadas. En general, para un conjunto de m funciones que dependen de n variables independientes: q p p
),...,,(),...,,(
2112
2111
n
n
xxxfyxxxfy
)(xFy
),...,,(21 nmm
xxxfy
)(y
Si se considera que las n variables son dependientes del tiempo se puede expresar de laSi se considera que las n variables son dependientes del tiempo, se puede expresar de la siguiente manera:
n
n xfxfxfy 2
1
1
1
1 Matriz Jacobiana
n
n
xxfx
xfx
xfy
xxx
2
2
2
1
2
2
21
xx)(Jy
Matriz Jacobiana
Se puede observar que alser x función del tiempo,
mmm
n
xfxfxfy
xxx
21 xx)(Jy para cada instante detiempo la Matriz Jacobianaes distinta.
Jon Legarreta / Raquel Martinez28
n
n
mx
xx
xx
xy
2
2
1
1

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANAEn robótica, la jacobiana se utiliza tomando como funciones las correspondientes a las posiciones delextremo del robot siendo las variables independientes de dichas funciones las articulaciones:
CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANA
xxx qfqfqfx
Representación matricialVelocidad lineal del extremo
Velocidades del extremo
n
yyy
n
n
xxx
qqf
qqf
qqf
y
x
21
2
2
1
1
),...,,(),...,,(
21
21
ny
nx
qqqfyqqqfx
x
del extremo del robot Velocidades
de las articulacione
s
n
n
zzz
n
fff
qqf
qqf
qqf
z
qqq
2
2
1
1
21
),...,,(),...,,(
21
21
n
nz
y
qqqfqqqfz
Jacobiana
qzy
2
1
J
n
n
n
qf
qf
qf
qqfq
qfq
qf
21
2
2
1
1
),...,,(),...,,(
21
21
n
n
qqqfqqqf
nq
n
n
n
qqf
qqf
qqf
qqq
2
2
1
1
21
qqJqJv
v
)()(
Jon Legarreta / Raquel Martinez29
qJ )(
Velocidad angular extremo

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANACINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANA
Ejemplo: Robot esférico 3 GDLTabla D-H
i di ai i
Z3 Y3
X3
1 q1 L1 0 -90º2 q2 0 0 90º3 0 q3 0 0º
Y2
X2 Y1
X1
Z1Z2
MTH:
q2 1Z0
Y0
X
0101 SqCq
02020202
CqSqSqCq
00100001
X0
1000101001010
1 LCqSqqq
A
100000100202
1
2
CqSqA
100031000010
2
3 qA
Jon Legarreta / Raquel Martinez30
1000 000 1000

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANACINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANA
Ejemplo: Robot esférico 3 GDL
00100001
02020202
01010101
03
CqSqSqCq
CqSqSqCq
A
21321121
10003100
10000010
100010103
SqCqqSqCqSqCqCq
qLA
)( qqqfx
1232022132112121321121
03 LCqqCqSq
SqSqqSqSqCqCqSqSqCqqSqCqSqCqCq
A),...,,(),...,,(),...,,(
21
21
21
ny
nx
qqqfzqqqfyqqqfx
1000
), ,,(21 nz
qqqf
213 SqCqqx
123213213
LCqqzSqSqqySqCqqx
Ahora se calcula el Jacobiano, a partir de las
ecuaciones de posición del extremo
Jon Legarreta / Raquel Martinez31

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANACINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANA
Ejemplo: Robot esférico 3 GDL
213213
SqSqqySqCqqx
21213213321 SqCqCqCqqSqSqqyyyqx
qx
qxJacobiano
123213LCqqz
SqSqqy
223021213213
321 CqSqqSqSqCqSqqSqCqq
qz
qz
qz
qy
qy
qyJ
321 qqq
Las velocidades del extremo del robot, en función de las aceleraciones de las articulaciones y las posiciones de las mismas
121213213 qSqCqCqCqqSqSqqx
articulaciones y las posiciones de las mismas.
3
2
223021213213
q
qCqSqqSqSqCqSqqSqCqq
z
y
Jon Legarreta / Raquel Martinez32

CINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANACINEMÁTICA DE MOVIMIENTO: MATRIZ JACOBIANA
Ejemplo: Robot esférico 3 GDLSupongamos que la posición del robot viene definida por las articulaciones: q1=0, q2=90,q3=1m. El robot tiene una longitud L1=1 m y esta sometido a unas velocidades articularesde q1’=90º/s, q2’=0º/s y q3’=0.5 m/s. Calcular la velocidad del extremo del robot utilizando elJacobianoJacobiano.
10021213213 SqcqCqCqqSqSqq
010001
223021213213
CqSqqSqsqCqSqqSqCqqJ
qx 5.02100100 1
Velocidad del extremo del robot será:
sm
q
q
z
y /02
5.002
010001
010001
3
2
Jon Legarreta / Raquel Martinez33
Recommended

















