1
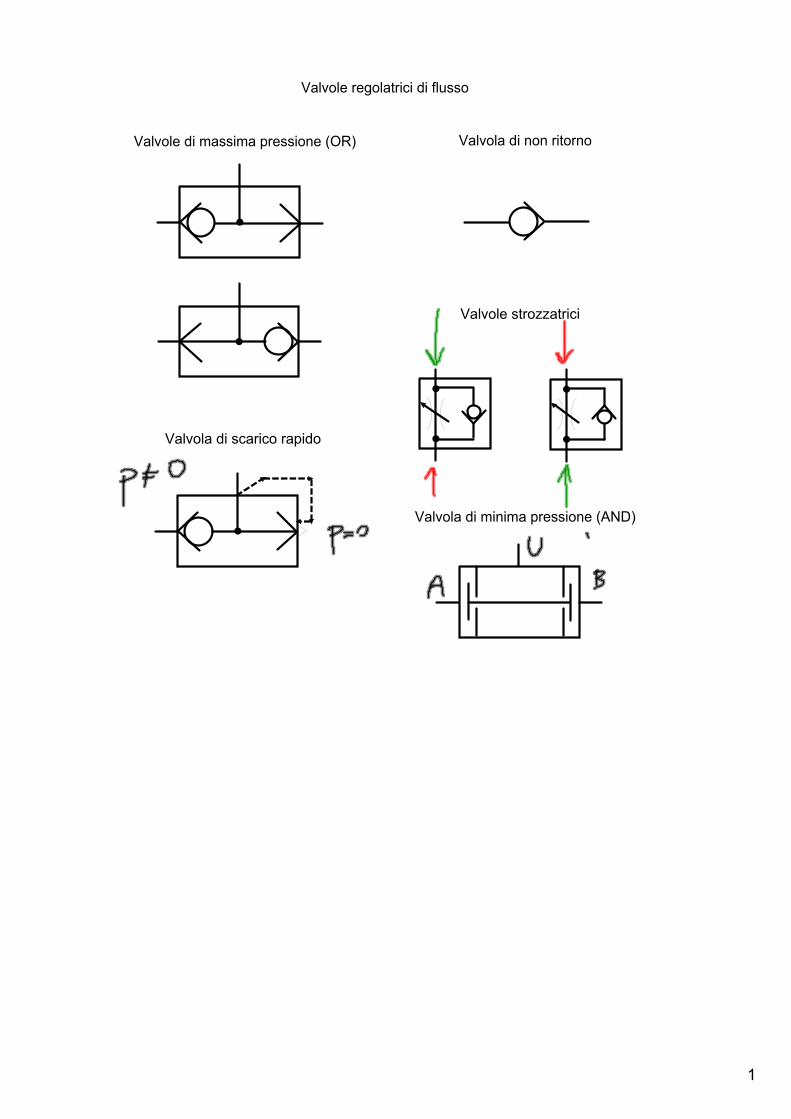
Valvole di massima pressione (OR) Valvola di non ritorno
Valvola di scarico rapido
Valvole strozzatrici
Valvole regolatrici di flusso
Valvola di minima pressione (AND)
2
M M
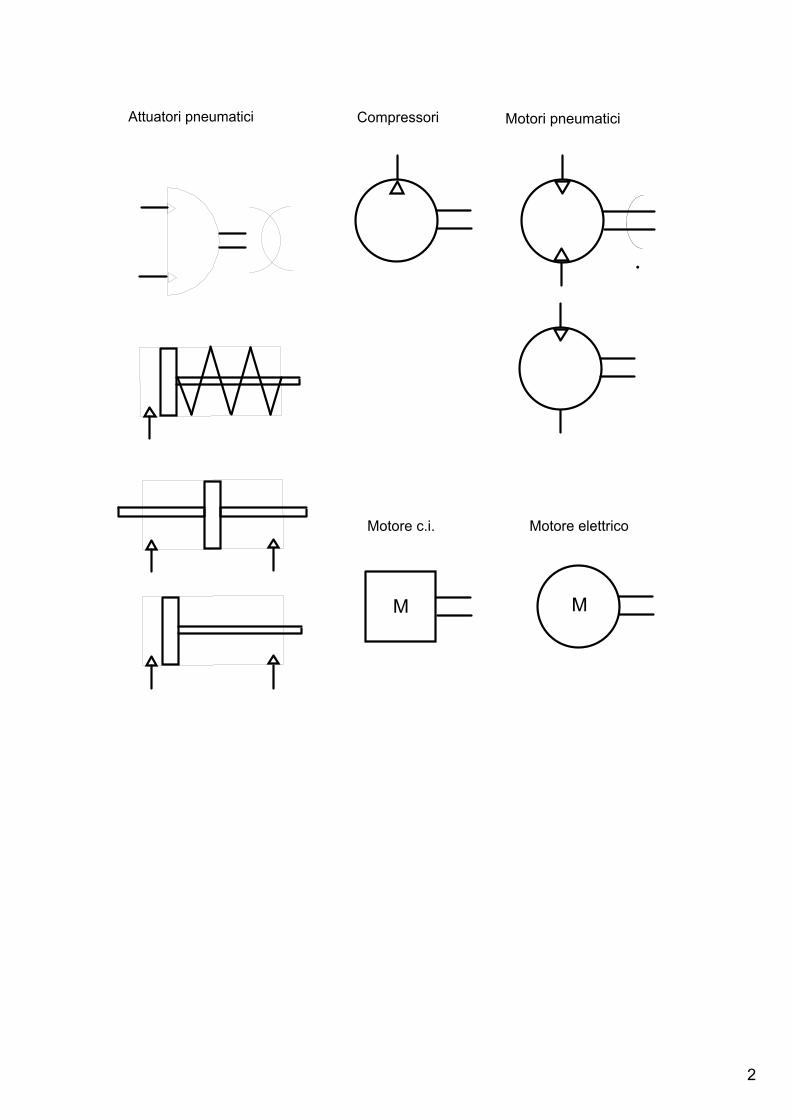
Attuatori pneumatici Compressori Motori pneumatici
Motore c.i. Motore elettrico

3
Refrigeratore RiscaldatoreRegolatore di temperatura
Scarico condensa automatico Filtro con scarico condensa Essiccatore
Serbatoio Oliatore Manometro
4
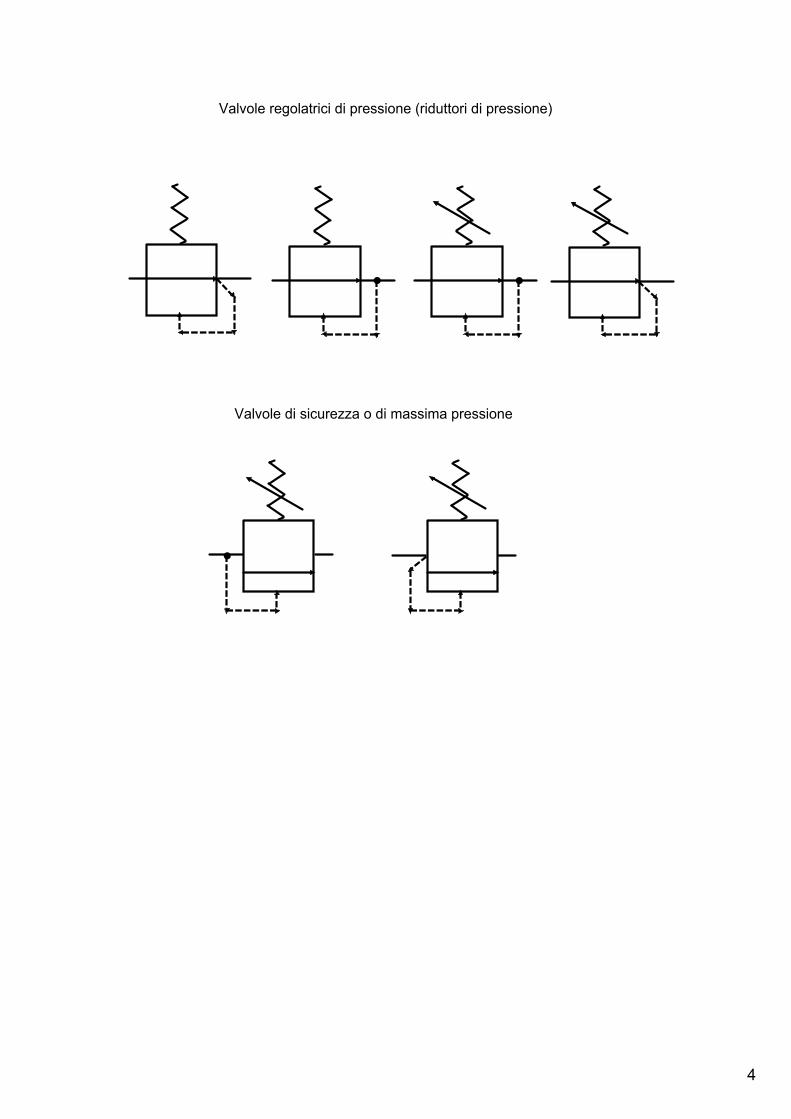
Valvole regolatrici di pressione (riduttori di pressione)
Valvole di sicurezza o di massima pressione
5
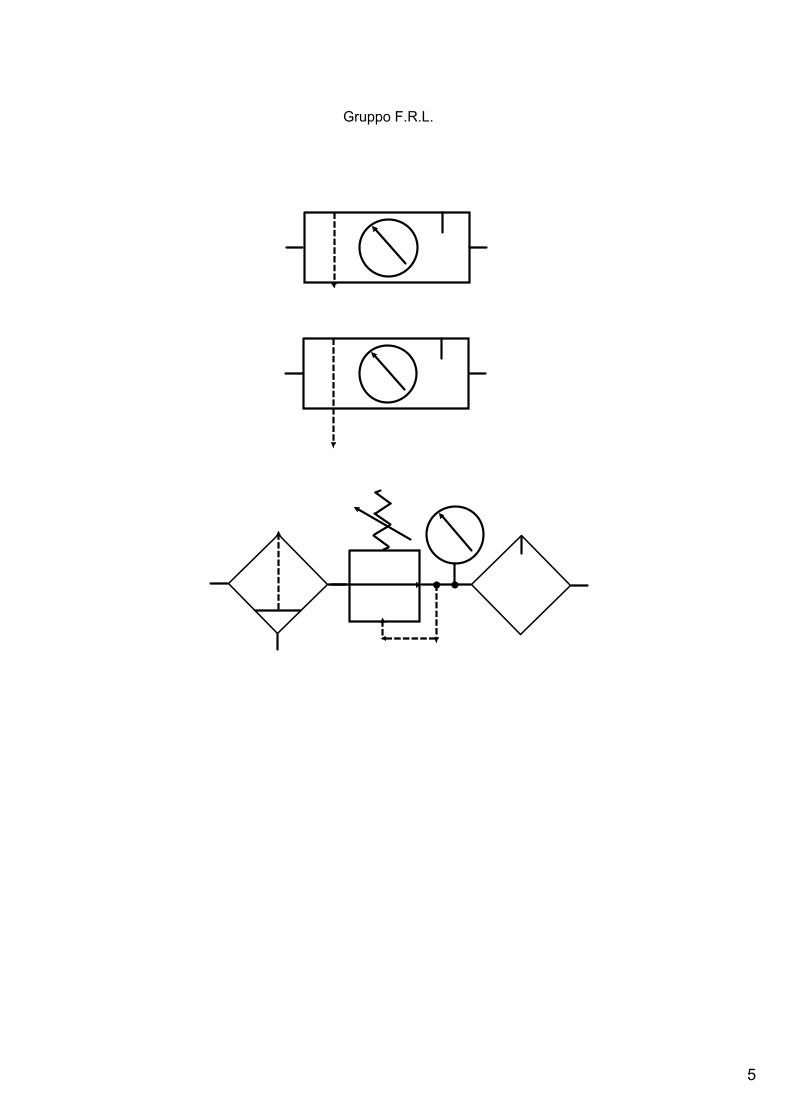
Gruppo F.R.L.
6
M
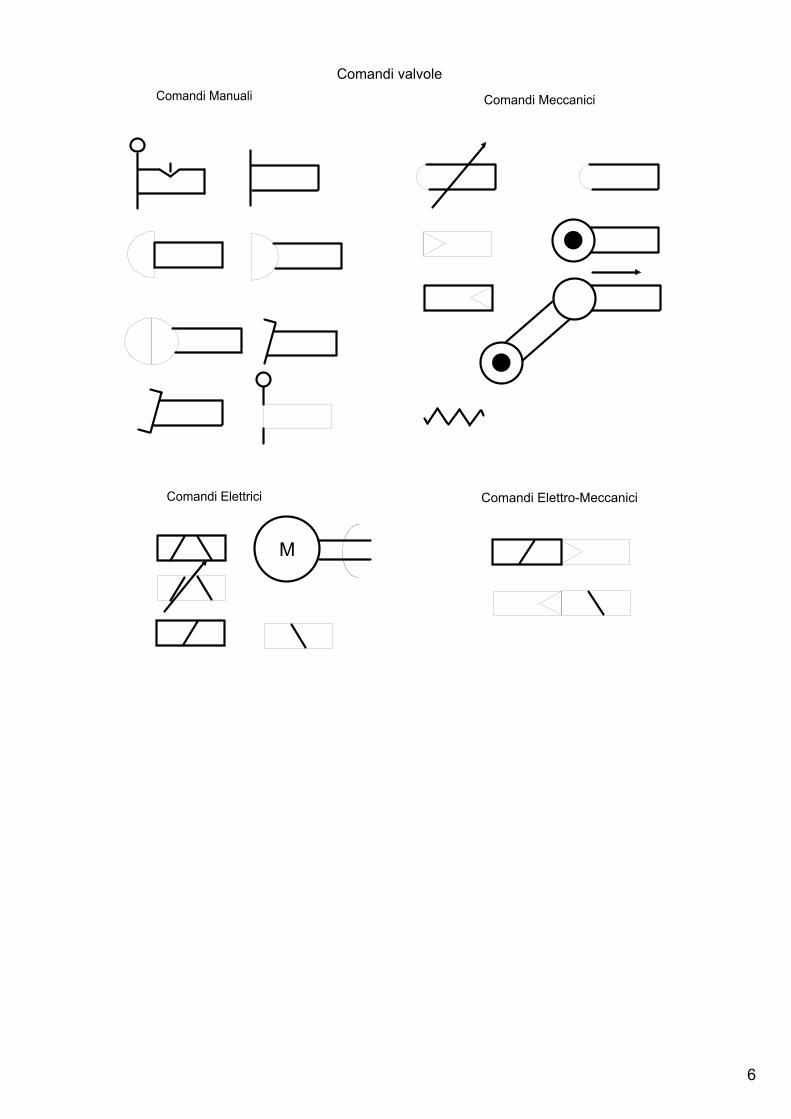
Comandi Manuali Comandi Meccanici
Comandi Elettrici Comandi ElettroMeccanici
Comandi valvole
7
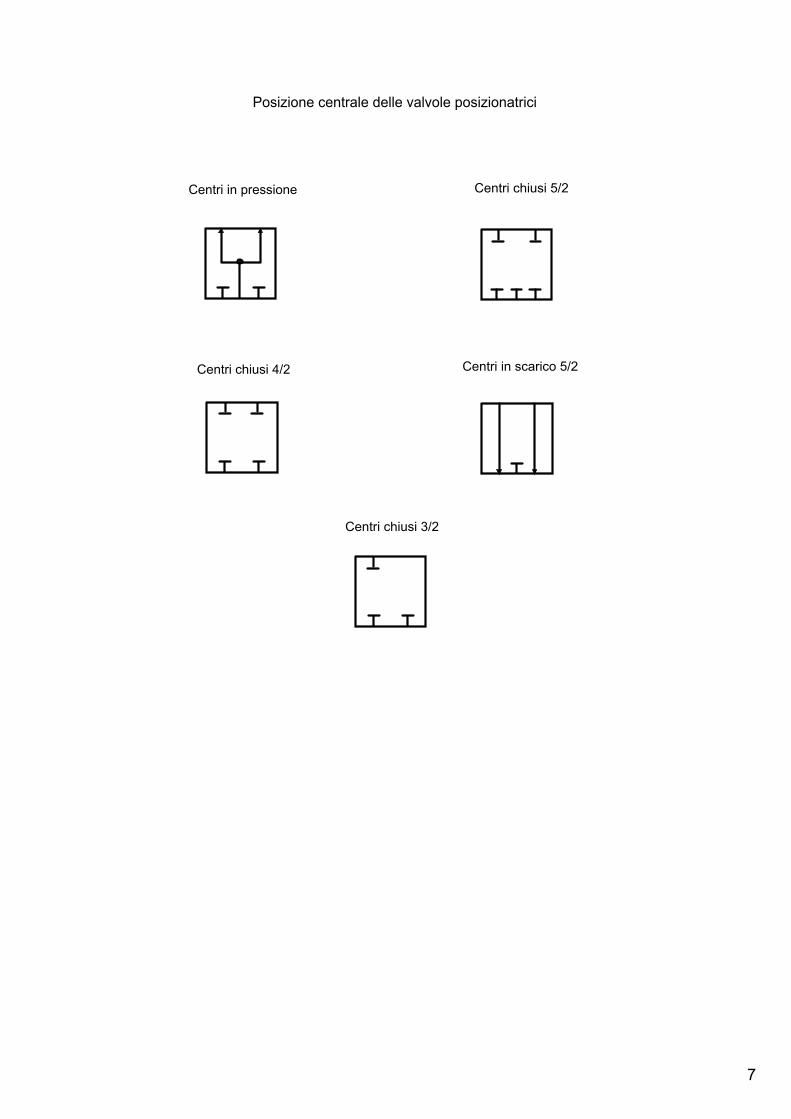
Posizione centrale delle valvole posizionatrici
Centri in pressione Centri chiusi 5/2
Centri chiusi 4/2 Centri in scarico 5/2
Centri chiusi 3/2
8
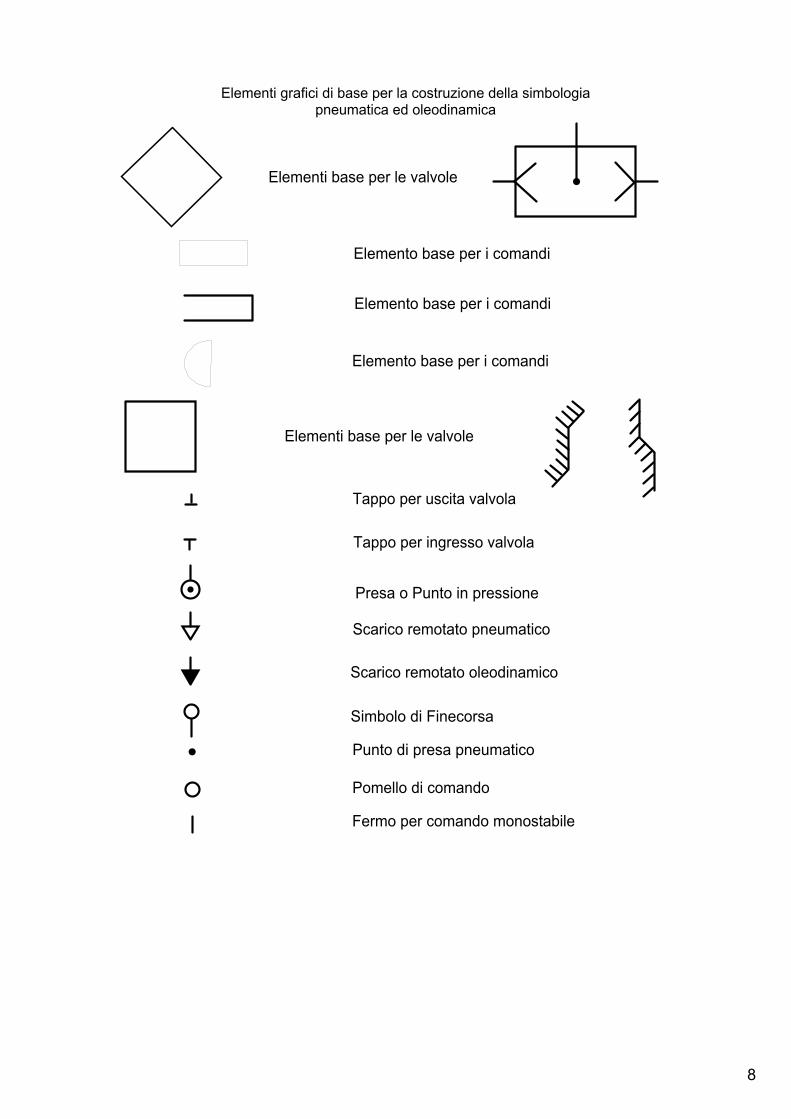
Elemento base per i comandi
Elemento base per i comandi
Elemento base per i comandi
Tappo per uscita valvola
Tappo per ingresso valvola
Presa o Punto in pressione
Scarico remotato pneumatico
Simbolo di Finecorsa
Punto di presa pneumatico
Elementi grafici di base per la costruzione della simbologia pneumatica ed oleodinamica
Pomello di comando
Fermo per comando monostabile
Scarico remotato oleodinamico
Elementi base per le valvole
Elementi base per le valvole

9
Valvole regolatrici direzionali di flusso (distributori)
10
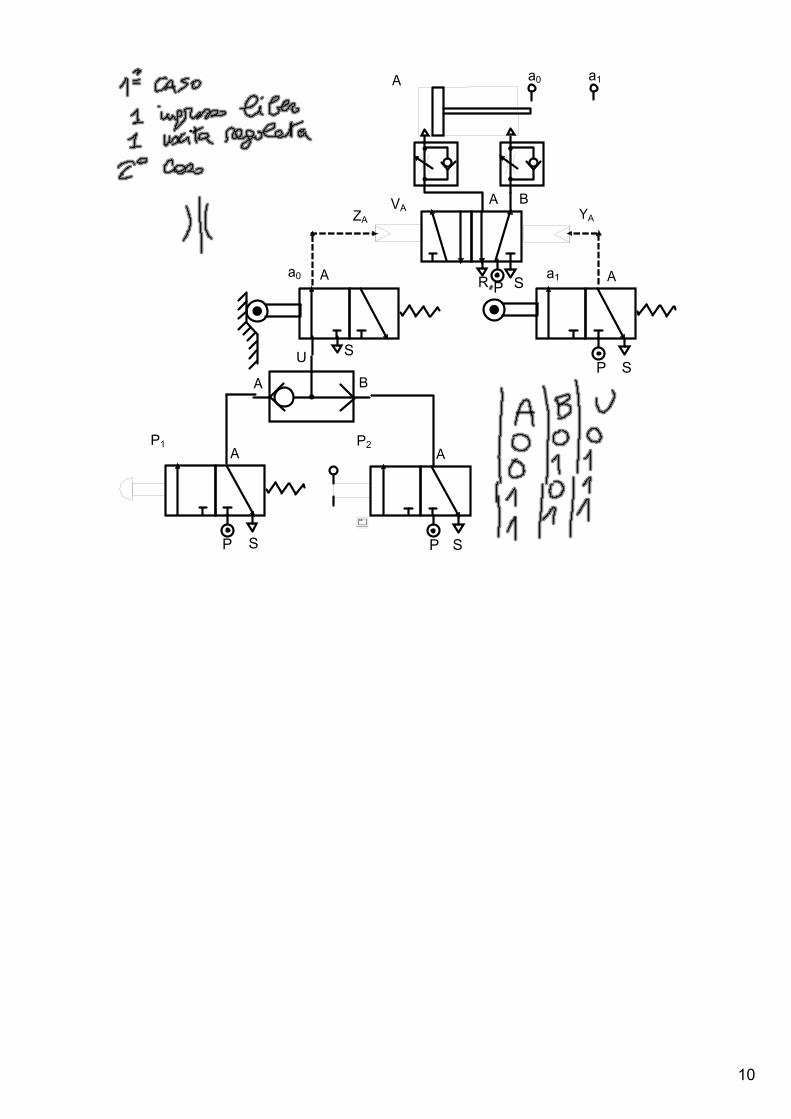
P1 P2
a0 a1
a0 a1
A
VAZA YA
S
R S
P S
P PS S
AA
A A
A B
P
A B
U

11
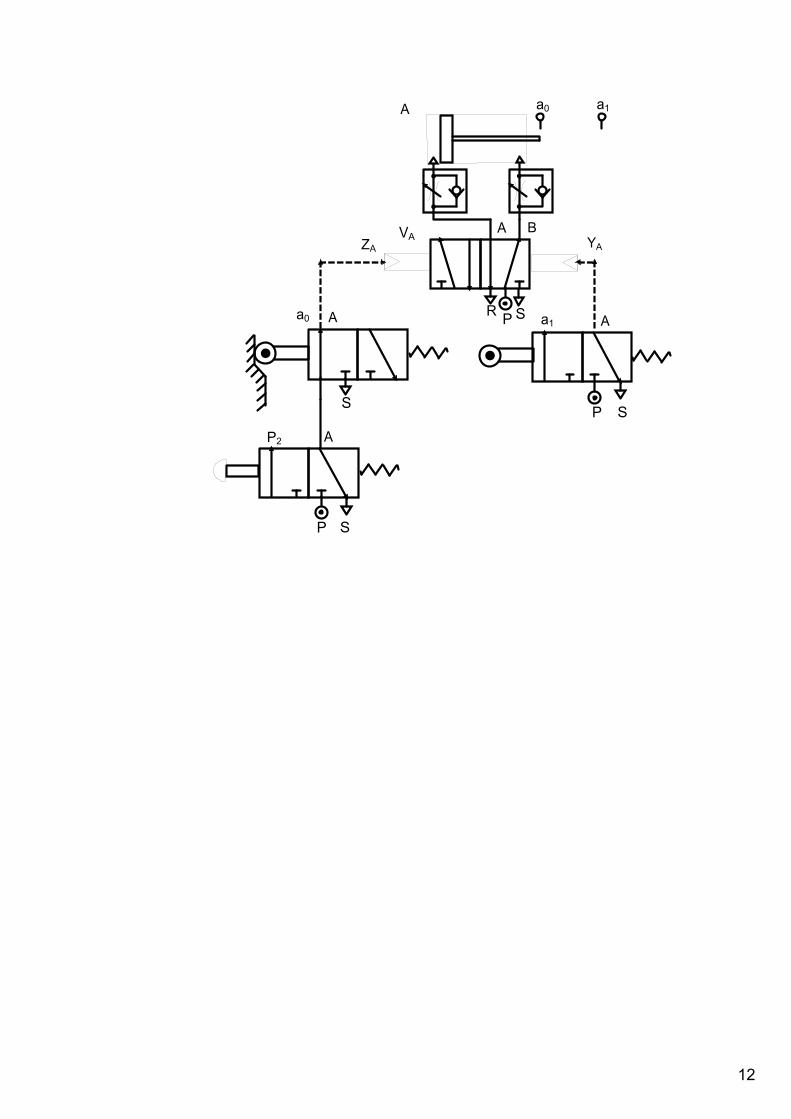
Espressione letterale della sequenza
A+/A
Equazioni del moto
A+ = (P1+P2)*a0A = a1
12
P2
a0 a1
a0 a1
A
VAZA YA
S
R S
P S
P S
A
A A
A B
P
13
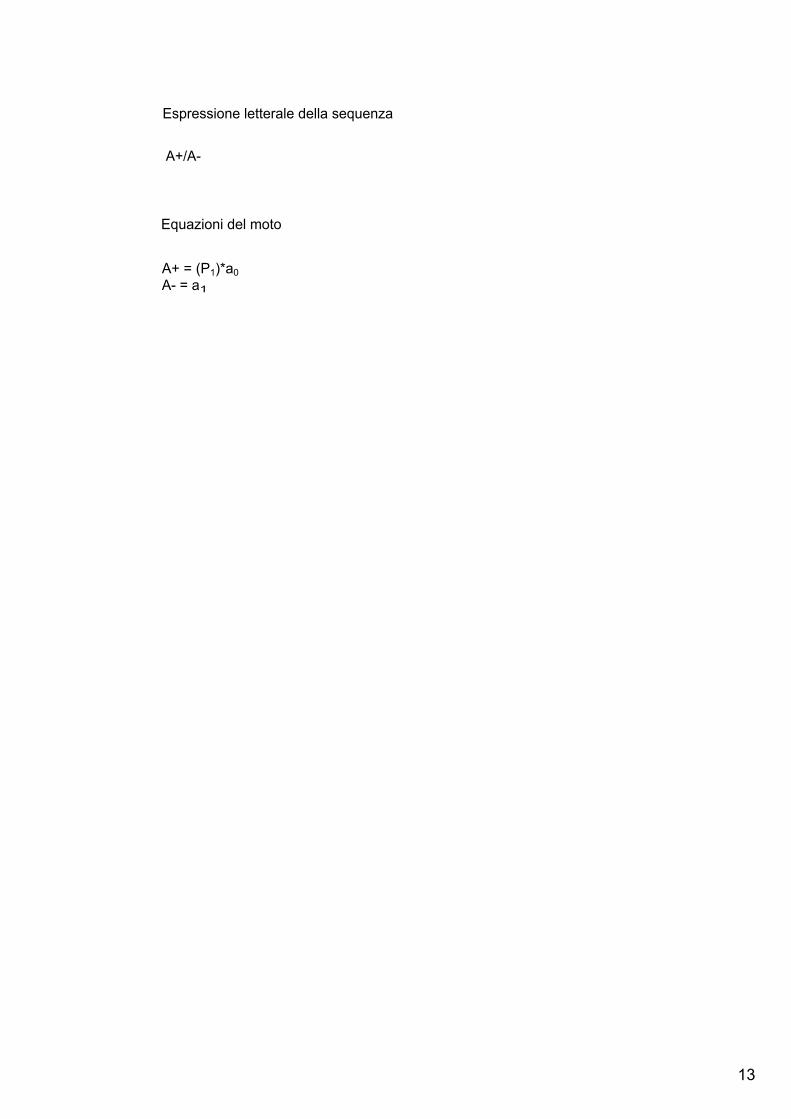
Espressione letterale della sequenza
A+/A
Equazioni del moto
A+ = (P1)*a0A = a1
14
P1 P2
a0 a1
a0 a1
A
VAZA YA
S
R S
P S
P PS S
AA
A A
A B
P
A
U
B

15
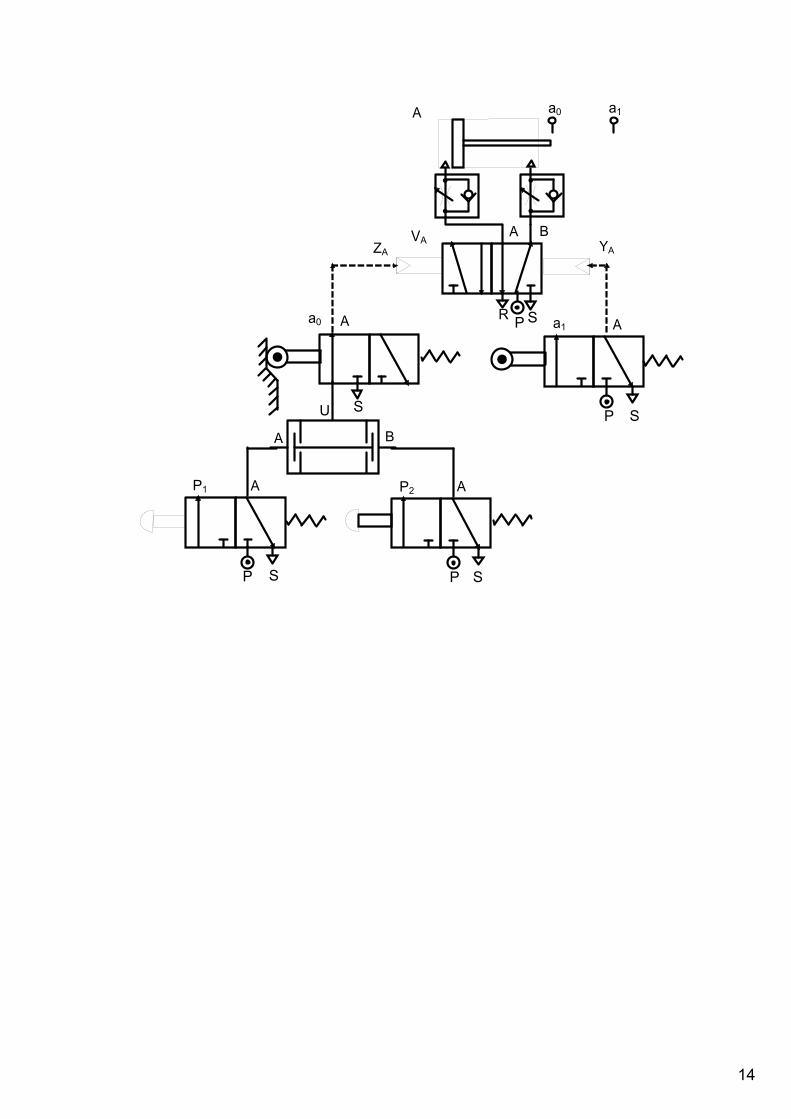
Espressione letterale della sequenza
A+/A
Equazioni del moto
A+ = (P1*P2)*a0A = a1
16
P1
P2
a0 a1
a0 a1
A
VAZA YA
S
R S
P S
P
P
S
S
A
A
A A
A B
P S
AP3
AU
(Inizio ciclo automatico)(Fine ciclo automatico)
P S
(Inizio ciclo singolo)
P
U
A B
17
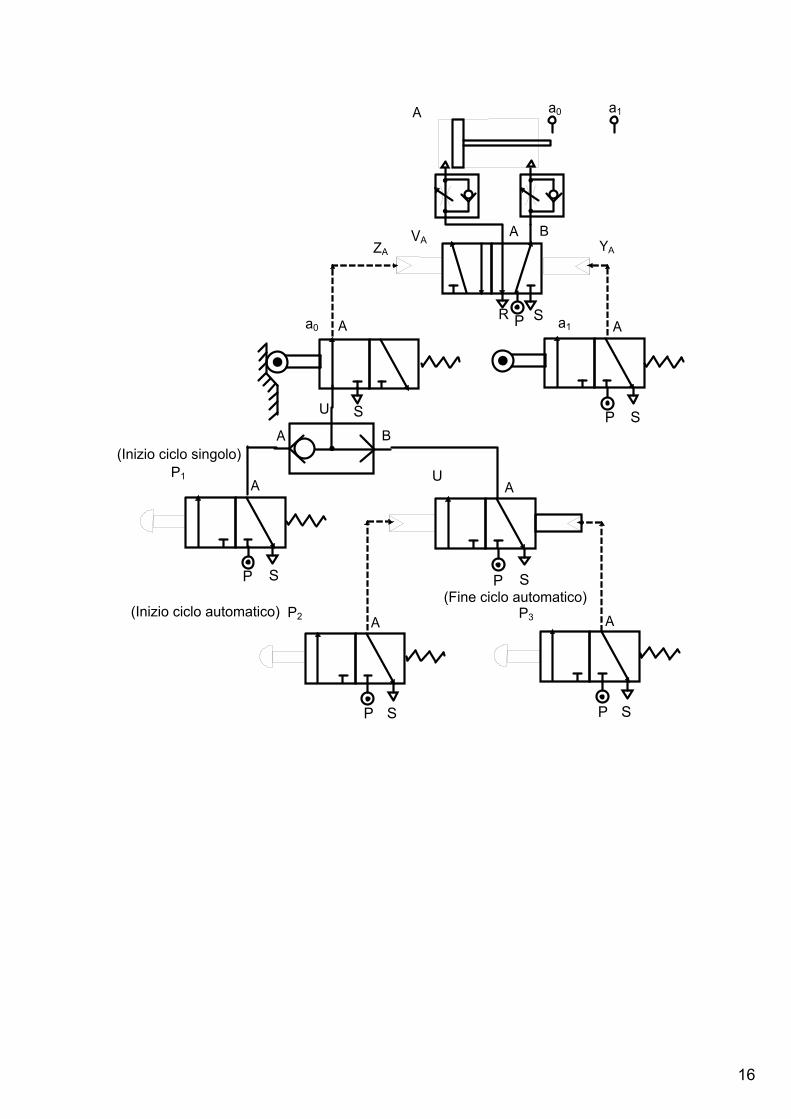
Espressione letterale della sequenza
A+/A
Equazioni del moto
A+ = (P1+U)*a0A = a1
Valvola di memoria U
U = P2U = P3
18
A
A
SP
P1
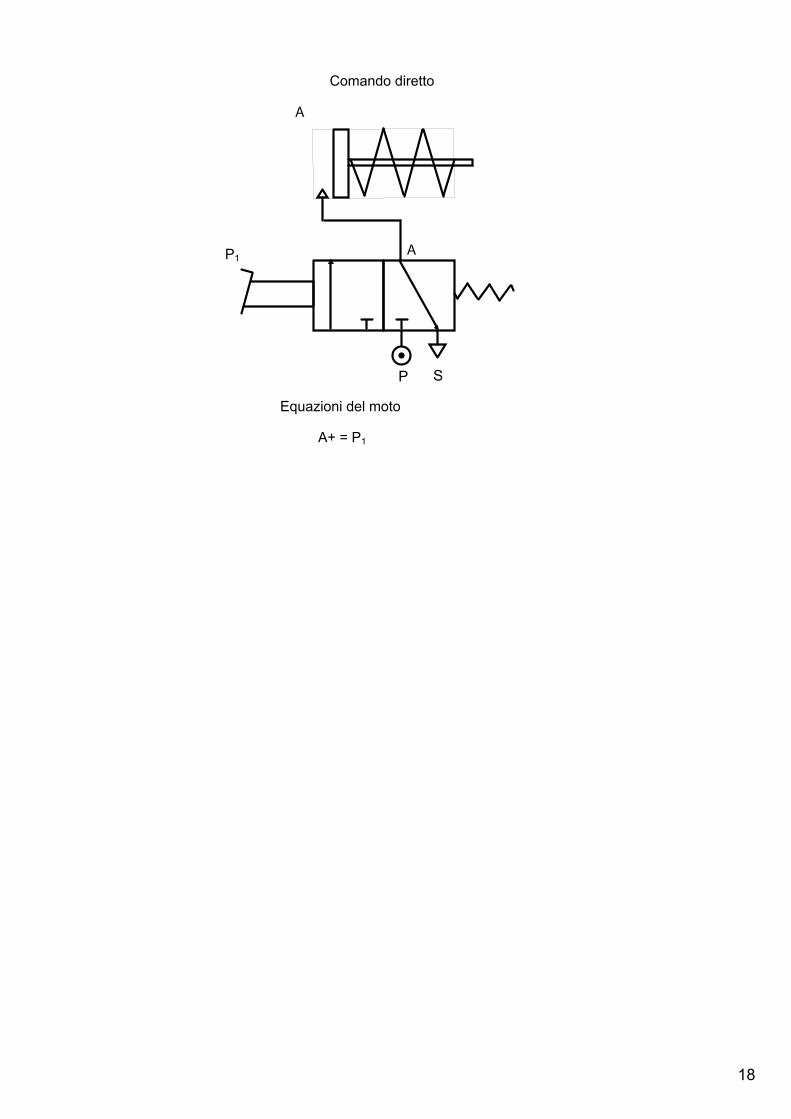
Comando diretto
A+ = P1
Equazioni del moto
19
A
A
SP
A
SP
P1
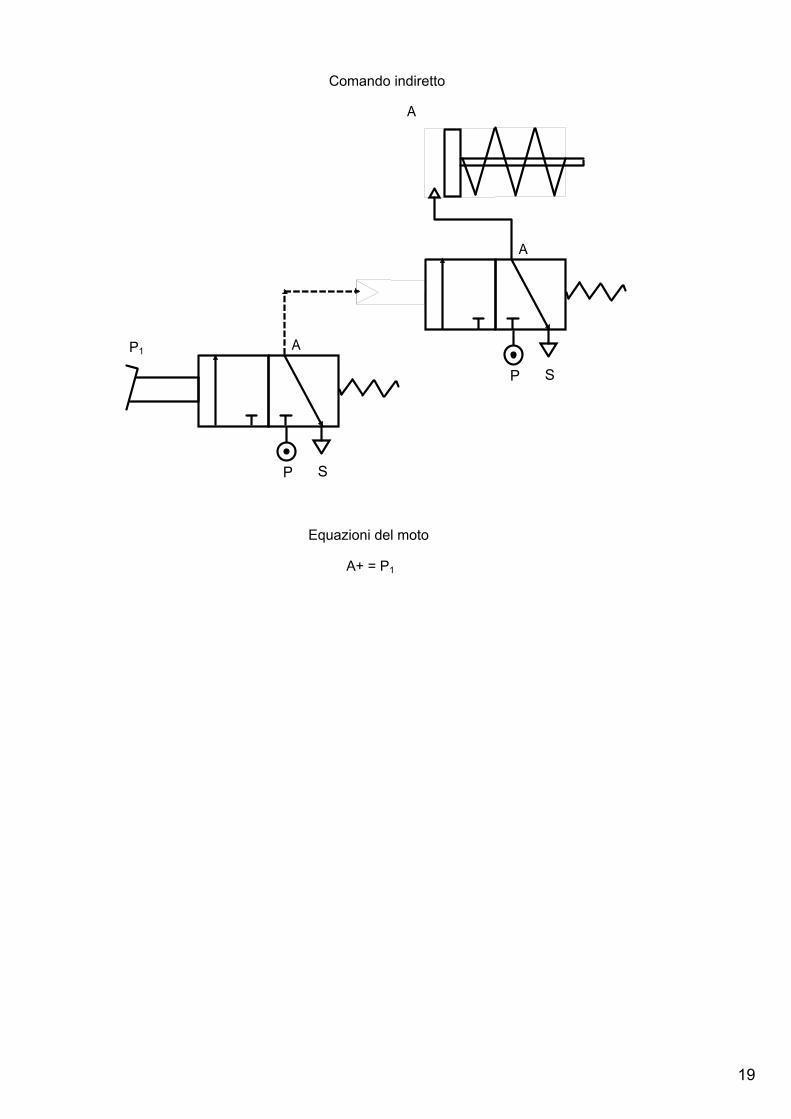
Comando indiretto
A+ = P1
Equazioni del moto
20
21
a0 a1A b0 b1B c0 c1C
c0
b1
VA
ZA YA
S
R S
S
A
A
A B
P a1
c1
VBZB YB
S
R S
S
A
A
A B
P a0 b0
VBZB YB
S
RS
S
A A
A B
P
P
P
P
P
P1 P2
S S
AA
A B
U
22
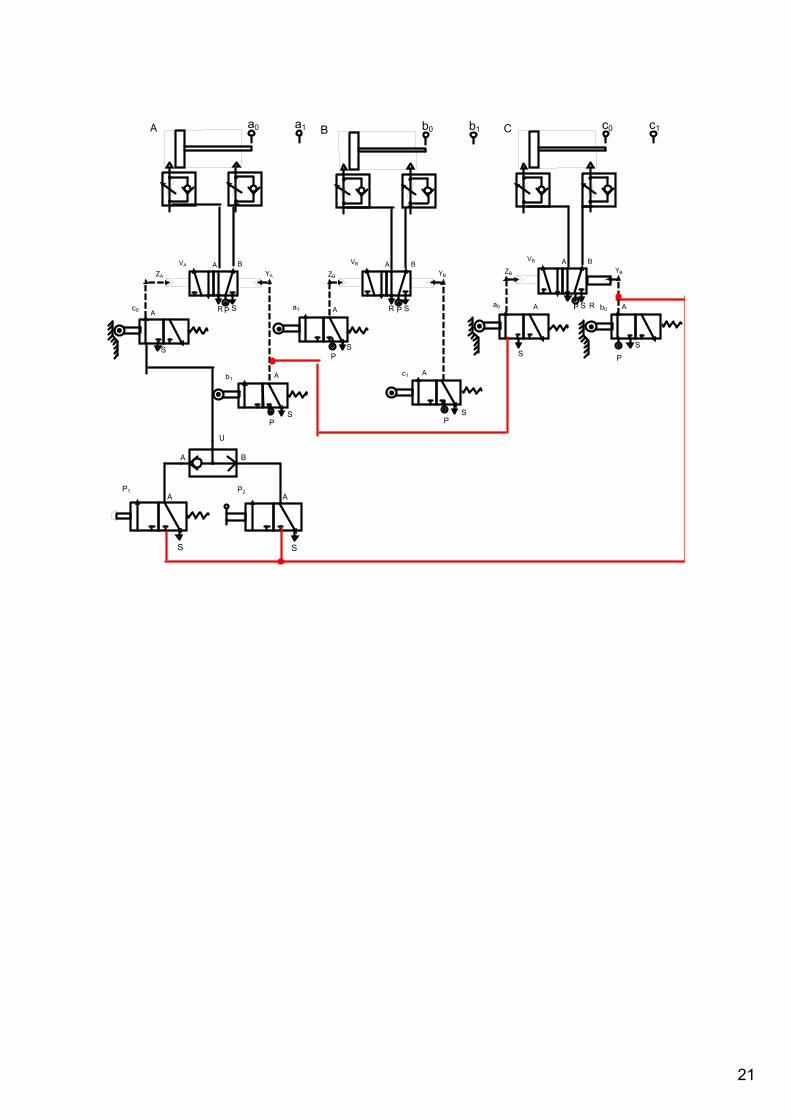
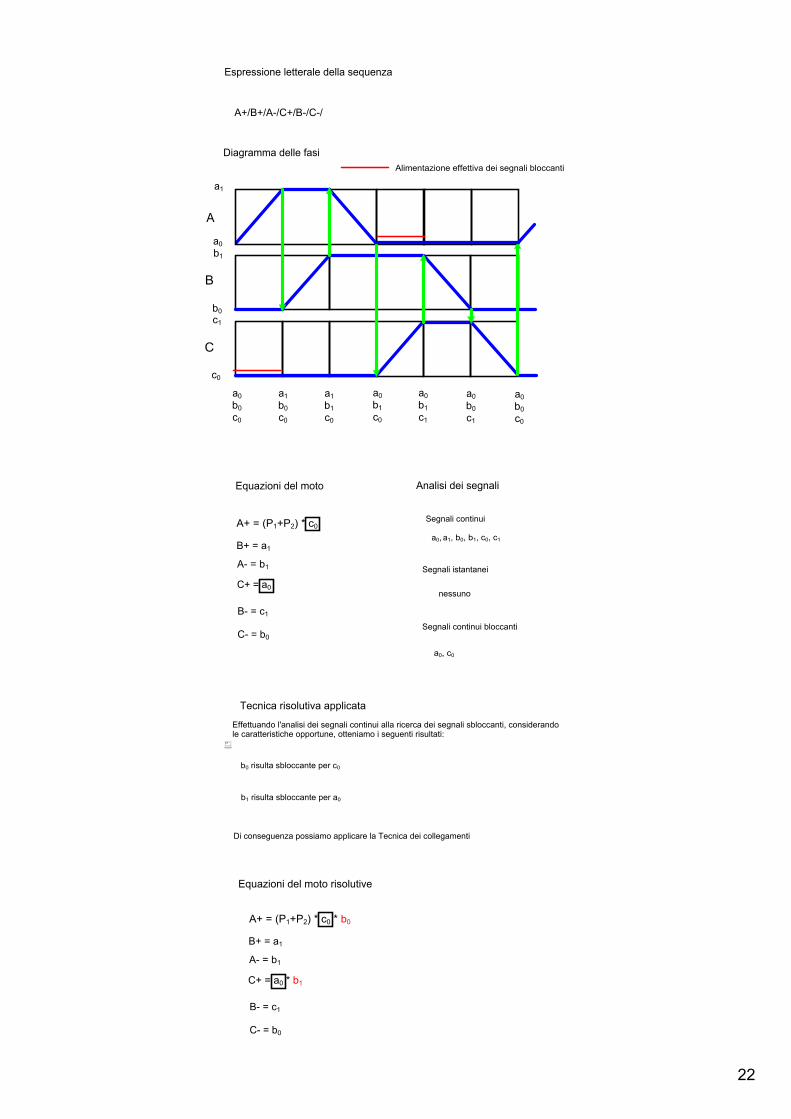
Espressione letterale della sequenza
A+/B+/A/C+/B/C/
Equazioni del moto
A+ = (P1+P2) * c0
B+ = a1A = b1
C+ = a0
B = c1
C = b0
Analisi dei segnali
Segnali continui
a0, a1, b0, b1, c0, c1
Segnali istantanei
nessuno
Segnali continui bloccanti
a0, c0
Tecnica risolutiva applicata
Effettuando l'analisi dei segnali continui alla ricerca dei segnali sbloccanti, considerando le caratteristiche opportune, otteniamo i seguenti risultati:
b0 risulta sbloccante per c0
b1 risulta sbloccante per a0
Di conseguenza possiamo applicare la Tecnica dei collegamenti
Diagramma delle fasi
a1
a0b1
b0c1
c0
A
B
C
a0b0c0
a1b0c0
a1b1c0
a0b1c0
a0b1c1
a0b0c1
a0b0c0
Equazioni del moto risolutive
A+ = (P1+P2) * c0 * b0
B+ = a1A = b1
C+ = a0 * b1
B = c1
C = b0
Alimentazione effettiva dei segnali bloccanti

23
Domanda:
Se qualche finecorsa viene azionato in modo erroneo ad inizio ciclo, si possono verificare dei mal funzionamenti nella sequenza?
Risposta:
A priori non posso saperlo, solo dopo un'analisi della situazione dei finecorsa e soprattutto delle valvole distributrici di potenza posso stabilire se ci sono delle corse possibili non previste nella sequenza. In realtà la vera situazione può emergere solo dalla strutturazione di un diagramma di flusso con la definizione di tutti i mal funzionamenti possibili, anche nelle fasi successive.
24
Come posso procedere?
Devo ricercare dei segnali che tolgano l'alimentazione al finecorsa nella condizione iniziale.
• Le valvole distributrici di comando e controllo (finecorsa).• Le valvole distributrici di potenza.
Quali valvole possono darmi tali segnali?

25
a0 a1A b0 b1B c0 c1C
VA
ZA YA
R S
A B
Pc0
b1
S
S
A
A
a1
c1
VBZB YB
S
R S
S
A
A
A B
P a0 b0
VBZB YB
S
RS
S
A A
A B
P
P
P
P
P1 P2
S S
AA
A B
U
26
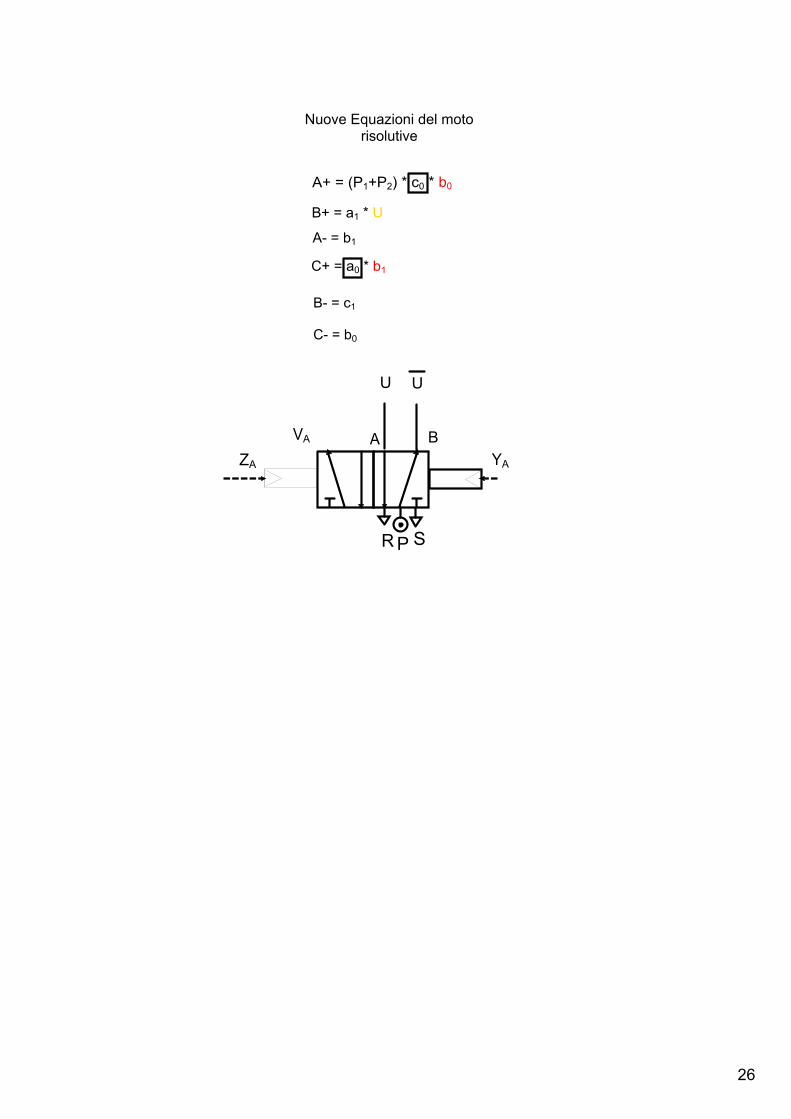
Nuove Equazioni del moto risolutive
A+ = (P1+P2) * c0 * b0
B+ = a1 * U
A = b1
C+ = a0 * b1
B = c1
C = b0
VA
ZA YA
R S
A B
P
U U
27
Caratteristiche dei segnali utilizzati per sbloccare i segnali bloccanti nella Tecnica dei Collegamenti
Il segnale deve essere continuo e durare almeno due fasi (in casi particolari può durare solo una fase).
Il segnale non deve essere bloccante.
Il segnale deve iniziare prima (per consentire al segnale che diverrà bloccante di espletare la sua funzione nella sequenza) e terminare prima del segnale divenuto bloccante (per realizzare l'effettivo sblocco).
Il segnale non deve ripresentarsi fintantochè risulta attivo il segnale divenuto bloccante.
28
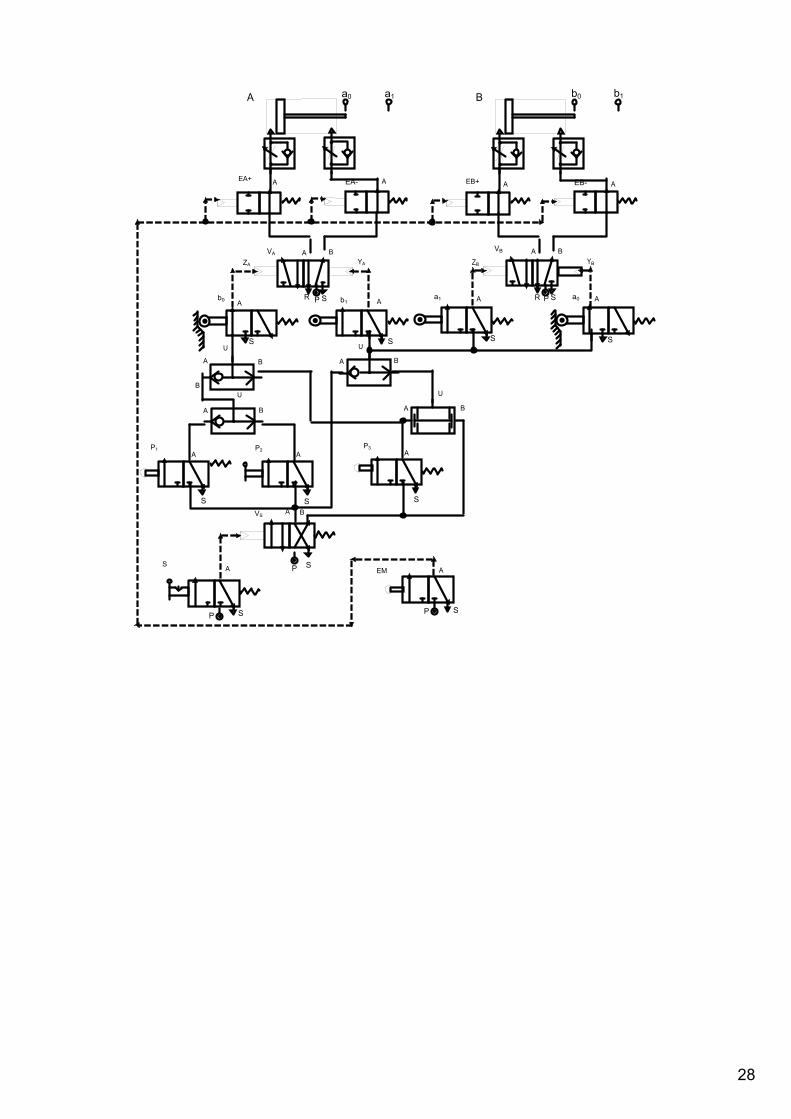
P1 P2
b0 b1
VA
ZA YA
S
R S
S
P
P
S S
AA
A A
A B
P
P3
a1 a0
VBZB YB
S
R S
S
S
S
A
A A
A B
P
S
a0 a1A b0 b1B
P S
SEM
EA+ EA EB+ EBA A A A
A A
A A
A B
AA
B
U
B
B B
B
U
U U
VS
29
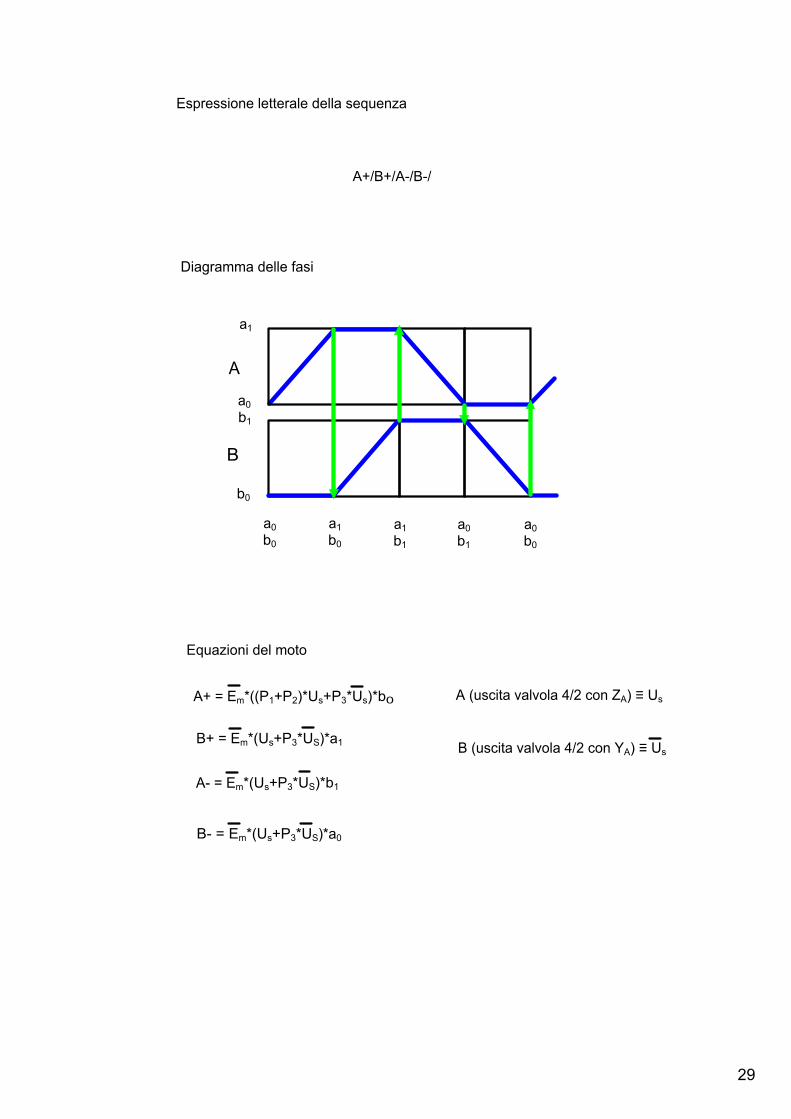
Espressione letterale della sequenza
A+/B+/A/B/
Equazioni del moto
A+ = Em*((P1+P2)*Us+P3*Us)*b0
B+ = Em*(Us+P3*US)*a1
A = Em*(Us+P3*US)*b1
B = Em*(Us+P3*US)*a0
a1
a0b1
b0
A
B
a0b0
a1b0
a1b1
a0b1
a0b0
Diagramma delle fasi
A (uscita valvola 4/2 con ZA) ≡ Us
B (uscita valvola 4/2 con YA) ≡ Us

30
A
A
P
Pand
Comando diretto con azionamenti di andata e ritorno di un cilindro a S.E.
S
APrit
A+ = Pand
Equazioni del moto
A = Prit

31
A
A
SP
A
SP
Pand
A+ = Pand
Equazioni del moto
A
SP
Prit
A = Prit
Comando indiretto con azionamenti di andata e ritorno di un cilindro a S.E.
VA

32
A BP1
R P S
A
Comando diretto con azionamento generico di andata di un cilindro a D.E.
A+ = P1
Equazioni del moto
33
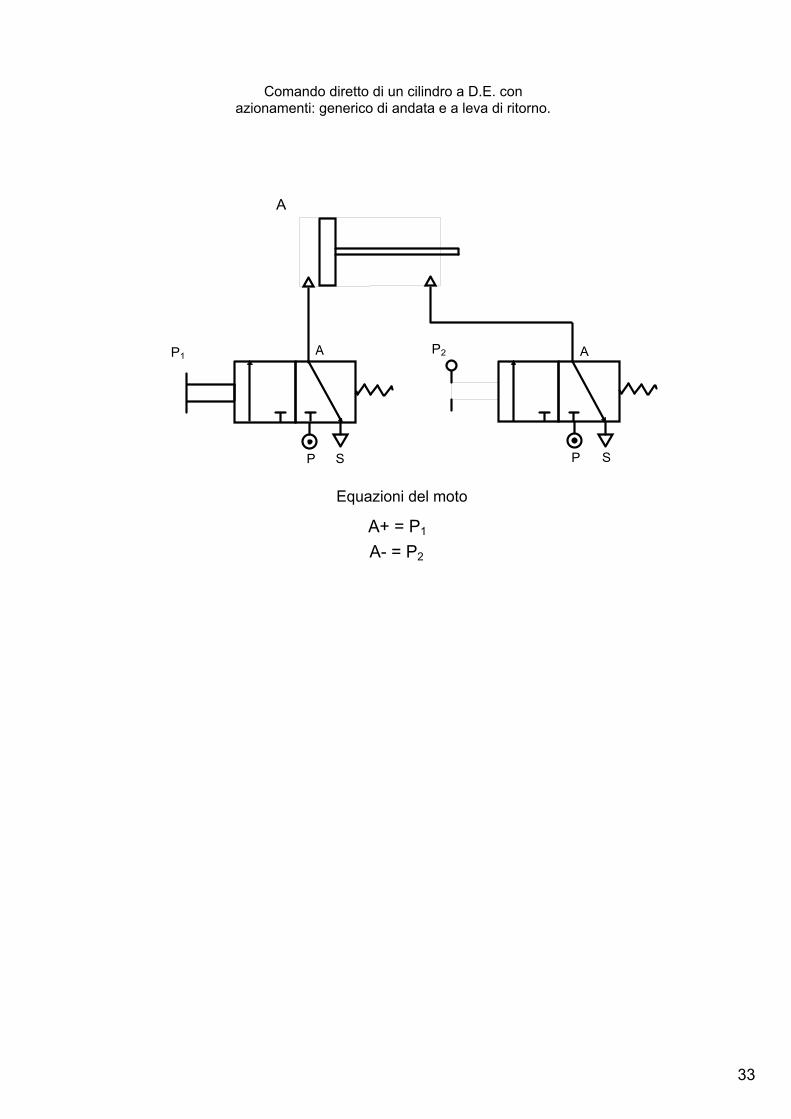
A AP1
P S
A
Comando diretto di un cilindro a D.E. con azionamenti: generico di andata e a leva di ritorno.
A+ = P1
Equazioni del moto
P S
P2
A = P2

34
A B
P1
R P S
A
P S
A
A+ = P1
Equazioni del moto
Comando indiretto di un cilindro a D.E. con azionamento a pedale di andata.
VA
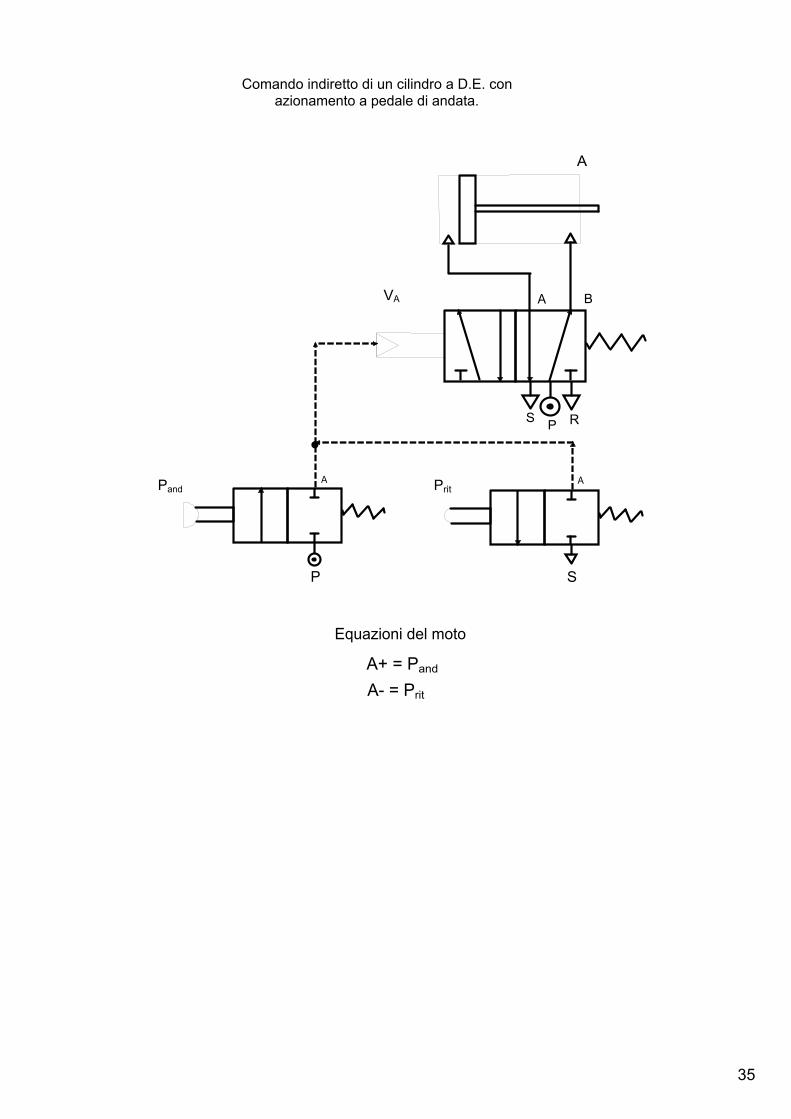
35
A
P
Pand
S
APrit
A B
RPS
A
Comando indiretto di un cilindro a D.E. con azionamento a pedale di andata.
A+ = Pand
Equazioni del moto
A = Prit
VA

36
A
AP1
P S
Regolazione della velocità di un cilindro a S.E. nella corsa di andata.
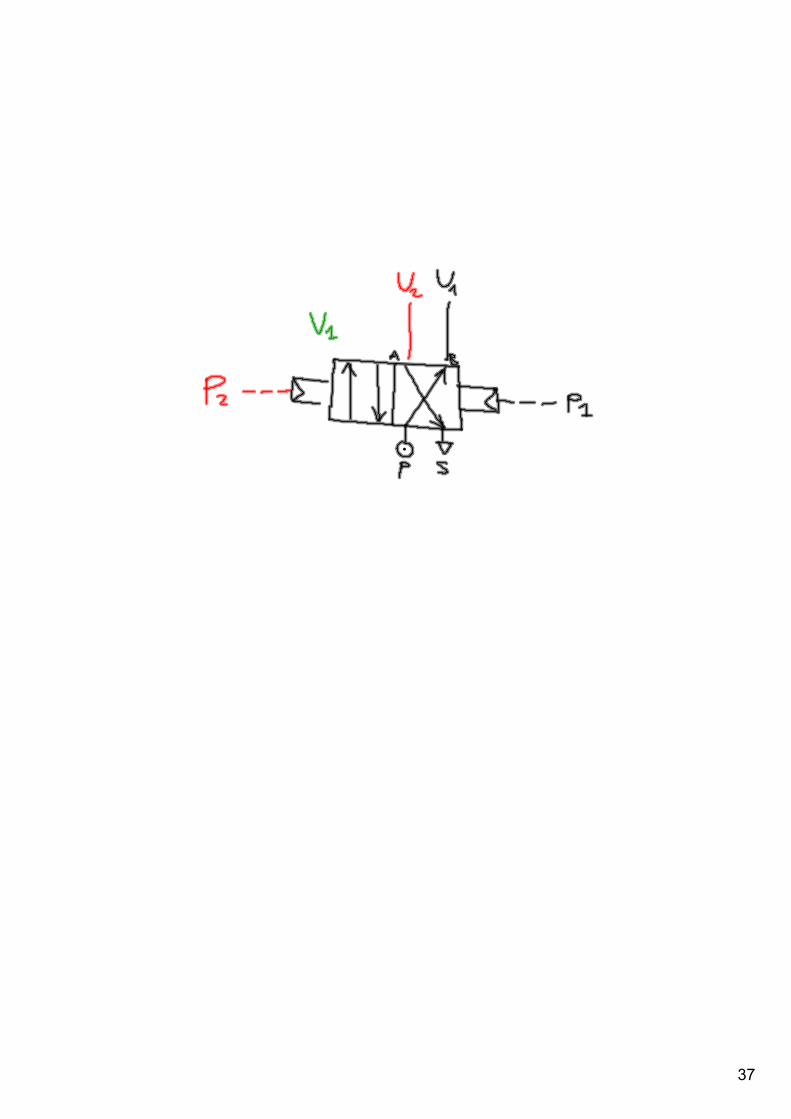
37
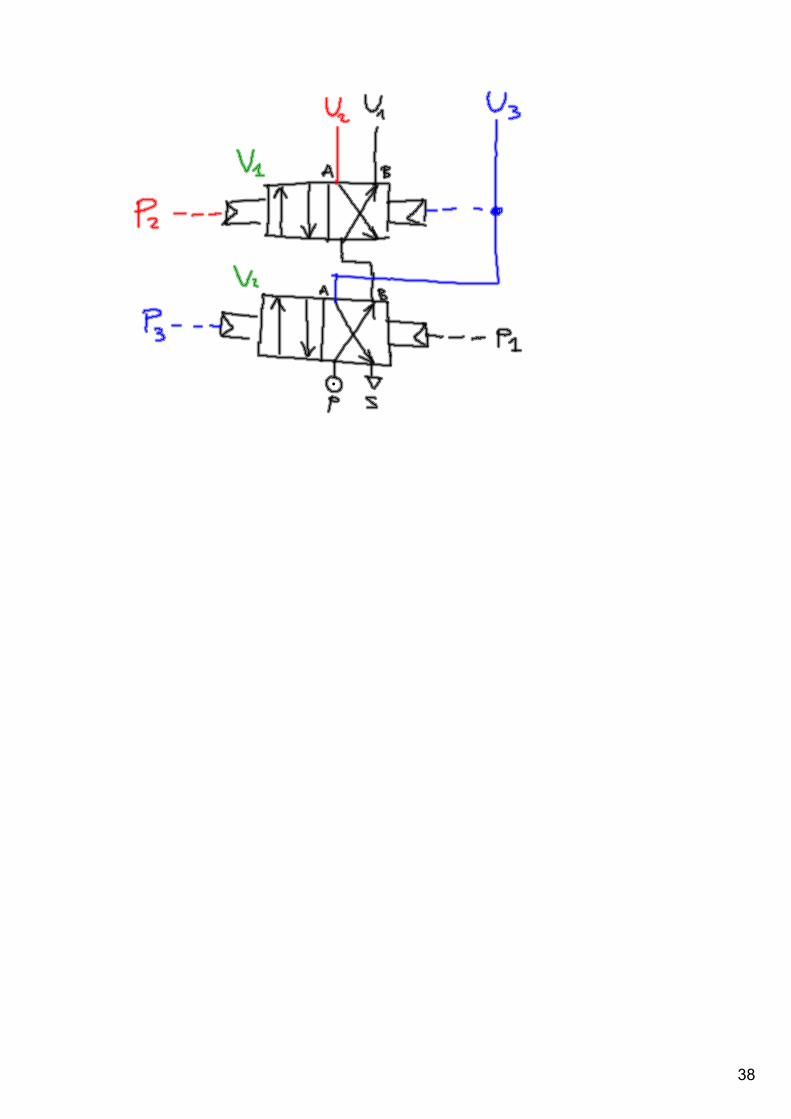
38
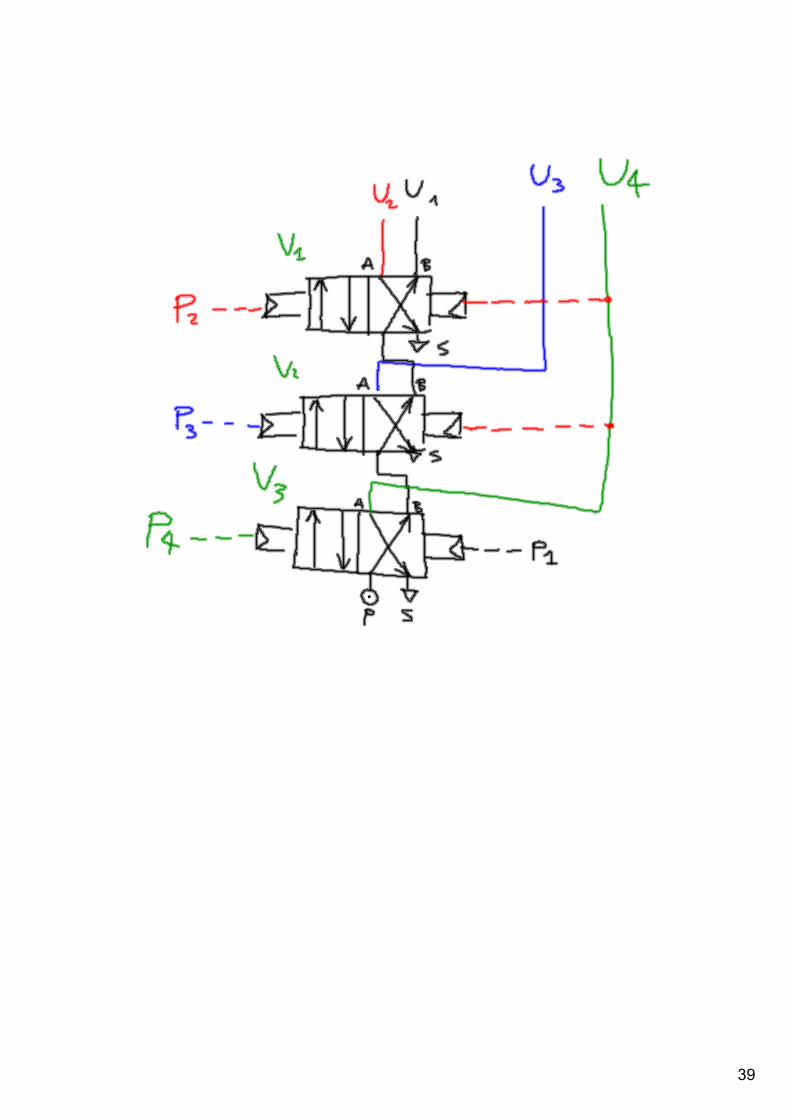
39

40
AP1
P S
A
Regolazione della velocità di un cilindro a S.E. nella corsa di ritorno.

41
AP1
P S
A
Regolazione della velocità di un cilindro a S.E. nella corsa di andata e di ritorno.
42
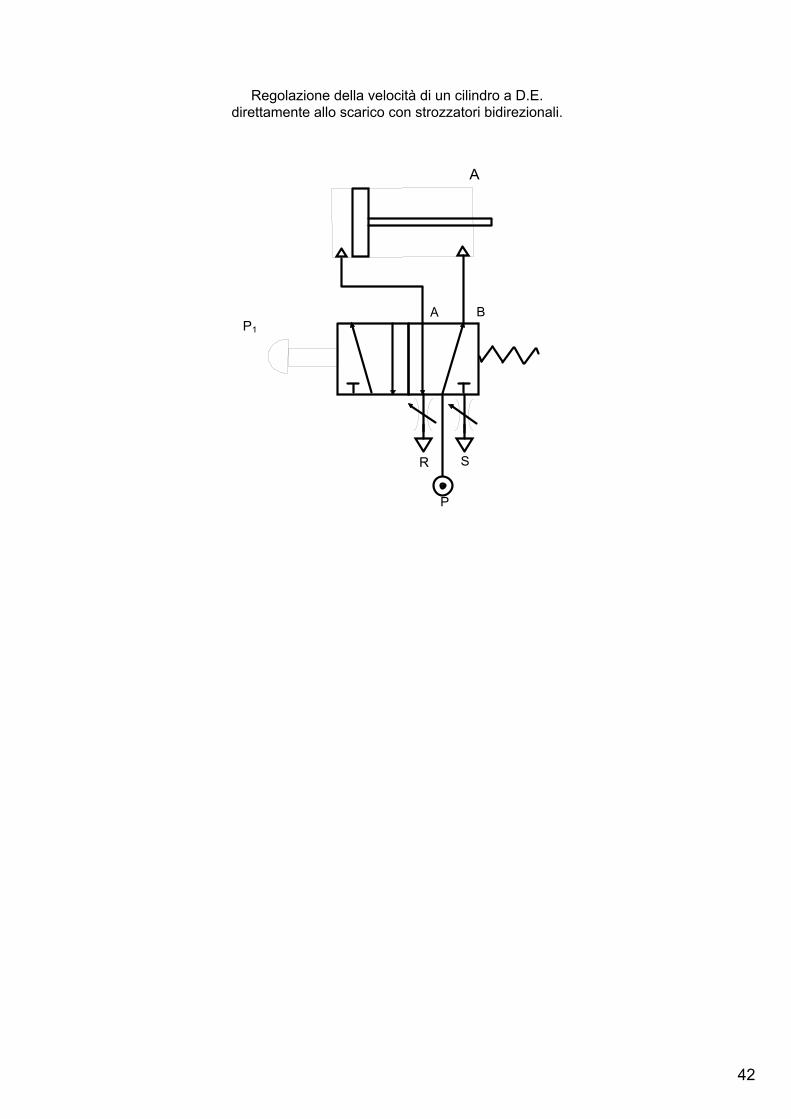
A B
R
P
S
A
P1
Regolazione della velocità di un cilindro a D.E. direttamente allo scarico con strozzatori bidirezionali.
Recommended

















