1 Property of University of Pennsylvania, Vijay Kumar
Video 7.1
Vijay Kumar

2 Property of University of Pennsylvania, Vijay Kumar
Control of Affine Systems
State
Input
State equations
Output

3 Property of University of Pennsylvania, Vijay Kumar
Lie Derivative
Function
Vector Field
Lie derivative of f along X
X
X

4 Property of University of Pennsylvania, Vijay Kumar
Lie Derivative
Lie derivative of f along X
Example: n=2
q m
l

5 Property of University of Pennsylvania, Vijay Kumar
Example: Controlling a Single Output
Want
or
Need derivative of the output function
Lie Derivatives
Output

6 Property of University of Pennsylvania, Vijay Kumar
Single Input, Single Output, First Order Dynamics
State equations
Output
Rate of change of output
Control law
Closed loop system behavior Error exponentially
converges to zero

7 Property of University of Pennsylvania, Vijay Kumar
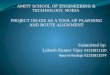
Input Output Linearization
u y v
original
system nonlinear
feedback
new system
Nonlinear feedback transforms the original nonlinear system to a new linear system
Linearization is exact (distinct from linear approximations to nonlinear systems)

8 Property of University of Pennsylvania, Vijay Kumar
Affine, Single Input Single Output
State x
State equations
Output
(rate of change of output is independent of u)
Input u
Rate of change of output
Explore higher order derivatives of output nonzero?
Control law

9 Property of University of Pennsylvania, Vijay Kumar
Affine, Single Input Single Output
State x
State equations
Output
(rate of change of output is independent of u)
Input u
Rate of change of output
Control law

10 Property of University of Pennsylvania, Vijay Kumar
Affine, Single Input Single Output
State x
State equations
Output
Input u
Rate of change of output
Control law
Closed loop system behavior
Error exponentially converges to zero

11 Property of University of Pennsylvania, Vijay Kumar
Affine, Single Input Single Output
11
State x
Input u
State equations
Output
Relative degree, r The index of the first nonzero term in the sequence
r=k+1
…

12 Property of University of Pennsylvania, Vijay Kumar
Video 7.2
Vijay Kumar

13 Property of University of Pennsylvania, Vijay Kumar
Example 1. Single degree of freedom arm
q
m
t
l
r=2

14 Property of University of Pennsylvania, Vijay Kumar
Affine, SISO
r=1
r=2
r=3
feed forward
feedback
Linear control,
model independent
General form of control law

15 Property of University of Pennsylvania, Vijay Kumar
Single degree of freedom arm
q
m
t
l

16 Property of University of Pennsylvania, Vijay Kumar
Input Output Linearization
Single Input, Single Output, Relative degree r
y
original
system nonlinear
feedback
new system
Nonlinear feedback transforms the original nonlinear system to a new linear system
Linearization is exact (distinct from linear approximations to nonlinear systems)
v u

17 Property of University of Pennsylvania, Vijay Kumar
Multiple Input Multiple Output Systems
State x
Output
Input u
Assume each output has relative degree r
Nonlinear feedback law
leads to the equivalent system

18 Property of University of Pennsylvania, Vijay Kumar
Fully-actuated robot arm
(n joints, n actuators)
Dynamic model
‣ M is the positive definite, n by n inertia matrix
‣ is the n-dimensional vector of Coriolis and centripetal
forces
‣ N is the n-dimensional vector of gravitational forces
‣ t is the n-dimensional vector of actuator forces and torques

19 Property of University of Pennsylvania, Vijay Kumar
Fully-actuated robot arm (continued)

20 Property of University of Pennsylvania, Vijay Kumar
Relative degree is 2
Control law
Fully-actuated robot arm (continued)
Method of computed torque
(Paul, 1972)
Inverse dynamics approach to
control (Spong et al, 1972)

21 Property of University of Pennsylvania, Vijay Kumar
Under Actuated Systems
The number of inputs is smaller than the number
of degrees of freedom!

22 Property of University of Pennsylvania, Vijay Kumar
22
Kinematic planar cart
Outputs
State equations, inputs
Relative degree is 1
2 inputs, 3 degrees of
freedom

23 Property of University of Pennsylvania, Vijay Kumar
Planar Quadrotor
2 inputs, 3 degrees of
freedom

24 Property of University of Pennsylvania, Vijay Kumar
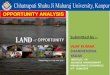
w3
w1
w2
w4
F4
F3
F2
F1
M2
M3
M4
M1
Three-Dimensional Quadrotor
4 inputs, 6 degrees of
freedom
Recommended