Wind and Solar Modeling Update Western Electricity Coordinating Council Renewable Energy Modeling Task Force
October 3, 2012
Michael Behnke, [email protected] Abraham Ellis, [email protected]

Presentation Outline
The need for wind and PV system planning models, WECC REMTF charter
Wind plant models – Power flow representation – WECC wind turbine type designations – Current WECC-approved dynamic models – New models under development through REMTF PV plant models
– Power flow representation – New models under development through REMTF
2

Why Do We Need Models?
Interconnection Studies – Identify system impacts, test mitigation alternatives – Establish interconnection requirements Transmission Planning and Expansion Studies
– Test compliance against reliability criteria Evaluation of Future High Penetration Scenarios
– Guide evolution of standards and technology
3

Modeling and NERC Standards
Models are required for system reliability Inadequacy of models is major barrier to large-scale
integration of variable (solar & wind) generation
“Validated, generic, non-confidential, and public standard power flow and stability (positive-sequence) models for variable generation technologies are needed. Such models should be readily validated and publicly available to power utilities and all other industry stakeholders. Model parameters should be provided by variable generation manufacturers and a common model validation standard across all technologies should be adopted...”
Reference: NERC IVGTF Special Report, Accommodating High Levels of Variable Generation, http://www.nerc.com/files/IVGTF_Report_041609.pdf
4

What Type of Models?
• Power flow models – Facility loading (thermal), steady-state
voltage stability & voltage control • Dynamic models
– Large-signal transient stability • Short circuit models
– Breaker duty, protection design and coordination
• Detailed, full-order models – Electromagnetic phenomena – Control interaction
5
Sta
ndar
d, G
ener
ic
Man
ufac
ture
r-sp
ecifi
c

WECC REMTF Charter
The Renewable Energy Modeling Task Force shall – Develop and validate generic, non-proprietary, positive-sequence
power flow and dynamic simulation models for solar and wind generation for use in bulk system studies
– Issue guidelines and model documentation – End goal: Models and model data are available in standard model
library of commercial simulation software REMTF activities support the Western Region’s initiatives
to maintain conformance with existing and emerging NERC MOD standards
REMTF activities supported by US DOE, coordinated by Sandia National Laboratories

Wind Models
WECC REMTF Wind and Solar Modeling Update, October 3, 2012

Power Flow Representation
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
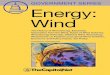
Single-Machine Equivalent Model
POI or connection to the grid Collector System
Station
Feeders and Laterals (overhead and/or underground)
Individual WTGs
Interconnection Transmission Line
W
Pad-mounted Transformer Equivalent
Wind Turbine Generator Equivalent
PF Correction Shunt Capacitors
Collector System Equivalent
Interconnection Line
Plant-level Reactive Compensation
POI or Connection to Transmission System
Station Transformer(s)
W
W Type 4 WTG
Type 1 WTG
Interconnection Line
POI or Connection to Transmission System
Station Transformer(s)
Pad-mounted Transformer Equivalent
PF Correction Shunt Capacitors
Collector System Equivalent
Plant-level Reactive Compensation
…or in special cases (e.g., heterogeneous feeders or WTGs of different types)…

Equivalent Collector System
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Equivalent impedance depends on WPP size, collector system topology, and line type (OH/UG)
If wind plant conductor schedule is available, Zeq and Beq, can be computed as follows
– For radial feeders with N WTGs and I branches:
ni = number of WTGs connected upstream of the i-th branch – Equations can be implemented easily on a spreadsheet Reproduces real/reactive losses assuming output from
WTGs is approximately uniform
21
2
N
nZjXRZ
I
iii
eqeqeq
∑==+= ∑
=
=I
iieq BB
1

Equivalent Collector System
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Example with N=18 and I=21:

WECC Wind Plant Power Flow Model Guide
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Procedure outlined in guideline available on WECC web site
http://www.wecc.biz/committees/Standing Committees/PCC/TSS/MVWG/Shared Documents/MVWG Approved Documents/WECC Wind Plant Power Flow Modeling Guide.pdf

WECC Wind Turbine Type Designations
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Type 2 WTG Wound Rotor Induction Generator with variable rotor resistance
Type 1 WTG Cage Rotor Induction Generator

WECC Wind Turbine Type Designations
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Type 3 WTG Doubly Fed Asynchronous Generator (DFAG)
Type 4 WTG Full Converter (FC)

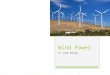
Current Type 1 Generic Model Standard induction generator model, except that mechanical state variables are in
the wind turbine model Shunt caps represented separately in the power flow Has been validated against one manufacturer specific model (Mitsubishi 1000A)
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Pseudo Governor
Model
Wind Turbine Model
GeneratorModel
MechanicalPower
Shaft Speed
Terminal Voltage
Real Power Pgen
QgenWT1GWT12T
WT1T
WT12AWT1P

Pseudo-Governor Model
Simplified representation of aero-torque/pitch control used in in Type 1 and Type 2 WECC generic models
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Kdroop1
Σ
Σ1 + sTpe
KpKi
pimax
pimin
11 + sT1
11 + sT2
pgen
pmech
wref
pref
Σ Kwspeed
s+

Turbine-Generator Shaft Model Total inertia H (input) is assumed to be the sum of generator & turbine inertia (Hg +
Ht). Inertia fraction Htfrac and first shaft torsional resonant frequency, Freq1 are also user-specified
Stiffness constant K is internally calculated Shaft model is used in Type 1, Type 2 & Type 3 generic models
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Tmech 1s
12Ht
K
Σ
1s
12Hg
ΣDshaft
Σ
+
+
+
+
Telec
-
-
-
ωο+
+ωgΣ-
ωο
+
+ω tΣ
1s
δ tg
Pmech
ω t
Pgen
ωg
∆ω t
∆ωg
∆ω tg ∆ω tg
..
..
Ht = H ∗ Htfrac
Hg = H - Ht
Ksh = H ω0.2Ht Hg (2π Freq1)2. . .
If Htfrac = 0, model defaults to single mass shaft

Current Type 2 Generic Model Same as Type 1 generic model, except that Rotor Resistance Model is added Has been validated against one manufacturer specific model (Vestas V80)
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Wind Turbine Model
Rotor Resistance
Control Model
GeneratorModel
Shaft Speed
Terminal Voltage
Real Power Pgen
Qgen
Pseudo Governor
Model
Rotor Resistance
“Aero” Torque
Real Power
WT2GWT2E
WT12TWT2T
WT12AWT2P

Rotor Resistance Control Model
Calculates external rotor resistance to be inserted based on rotor speed and machine electrical power
WECC REMTF Wind and Solar Modeling Update, October 3, 2012

Current Type 3 Generic Model Complex model in part because WTG topology allows for much wider range of
control options Has been validated against one manufacturer specific model (GE 1.5 MW)
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
WT3G
Converter ControlModel
Pitch Control Model
Wind Turbine Model
Blade Pitch
Generator /Converter
Model
Power Order
Speed Order
Shaft Speed
Current Command
Voltage Command
Real Power
Terminal Voltage
Regulated Bus Voltage
Real & Reactive Power
Pgen
QgenWT3E
WT3P WT3T

Generator/Converter Model Equivalent (algebraic) representation of generator & converter Flux dynamics neglected, mechanical states included in turbine model
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Vterm
High VoltageReactive Current
Management
Low VoltageActive CurrentManagement
Isorc-1X"
IPcmd 11 + 0.02 s
11 + 0.02 s
s0
E q"cmd
jX "
LVPL & rrpwr
11 + 0.02s
LVPL
Low Voltage Power Logic
V
LVPL
brkptzerox
I Plv
V
Lvplsw = 1
Lvplsw = 0
Lvpl1
I Qlv

Electrical Control Model Includes several options for volt/var control, including plant-level
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Vc
Pgen
Wind Plant Reactive Power Control Emulation
Kiv / s+
Vrfq
11 + sTc
11 + sTr
Qmax
Qmin
1/ fnKpv
1 + sTv
Qwv
11 + sTp
-1
Qref
0
varflg1
PFAreftan
x
+
+
++
Qgen
Vref
Vmax
Vterm
Kqv / s
XI Qmax
Vmin
Eq cmd
ToGenerator /Converter
Model
Kqi / s
Qord
Power FactorRegulator
Qcmd
Qcmd
Qmax
Qmin
XIQmin
vltflg
0
1
Σ Σ
ΣΣ
Volt/var Controller

Electrical Control Model Current limiting prevents total current magnitude from exceeding converter limits User-settable active/reactive injection priority
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
ImaxTDImaxTD
2 - IPcmd2
Minimum
IqmnIqmx
Ipmx
P, Q Priority Flag
-1
P Priority
10
Q Priority
Iqmn Iqmx
ImaxTD2 - IQcmd
2
I pmx
IQcmd
IPcmd
Minimum
Iphl
Minimum
-1
Minimum
I qhl Minimum
Vt
Iqmxv
Iqmxv1.6
qmax
1.0
Vt

WT3 Pitch Control Model
Calculates pitch angle as a function of speed and power error – Assumes pitch angle = 0 at rated and lower wind speed – Pset is normally set to 1.0
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
θ
ωref
Pord +
ωerrω
11 + sTPI
PI max
cmdθΣ+
+Pitch Control
Kpp + Kip / s
Anti- windup onPitch Limits
PitchCompensation
Kpc+ K ic / s
Anti- windup onPitch Limits
+
Σ
Σ
+
Pset
PI min
rate limit (PIrate )

WT3 Turbine Model
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
θ
BladePitch
PmechΣ
θο
+X Kaero Σ
Pmo
+
• Wind Turbine Aero Model Emulates computation of Pmech from
wind assuming that wind speed is constant (does not require power coefficients or CP curve)
Tmech 1s
12Ht
K
Σ
1s
12Hg
ΣDshaft
Σ
+
+
+
+
Telec
-
-
-
ωο+
+ωgΣ-
ωο
+
+ω tΣ
1s
δ tg
Pmech
ω t
Pgen
ωg
∆ω t
∆ωg
∆ω tg ∆ω tg
..
..
• Shaft model Same as Type 1 and
Type 2 generic models

Current Type 4 Generic Model Similar to the generic Type 3 model, except that pitch control module is not
included Has been validated against one manufacturer specific model (GE 2.5 MW)
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Generator/Converter
Model
ConverterControlModel
IpCommand
PowerOrder
Vreg bus V term
IqCommand
Pgen , Qgen
WindTurbineModel
Pgen , Qgen
Pgen

WTG Dynamic Model Updates Underway
New WT1/WT2 pitch control model – Addresses unrealistic behavior of current model during frequency
deviations New WT3/WT4 models
– Reflect input from many more WTG and component manufacturers than current models
– Emphasis on representation of behavior during and shortly after disturbances (European Grid Codes)
– Modular approach to facilitate future model evolution and re-use for solar PV models
WECC REMTF Wind and Solar Modeling Update, October 3, 2012

New WT1/WT2 Pitch Control Model
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Existing
Re-designed (testing underway)

New WT1/WT2 Pitch Control Model Good results compared to two major Type 1 WTG vendor-specific PSCAD models
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
P-I block: Gain=1, Time Constant=0.1s Lag Filter: Gain=2, Time Constant=3 s Rate Limiter: Up(pitch back)=1.5, Dn(restore)=0.5
P-I block: Gain=1, Time Constant=0.001s Lag Filter: Gain=1, Time Constant=0.01 s Rate Limiter: Up(pitch back)=0.5, Dn(restore)=0.5
Source: Zavadil

New Renewable Energy Models Modular structure approach (also used for PV models)
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Module Use REPC_A Wind/PV plant controller REEC_A Wind /PV inverter electrical controls REGC_A Generator/Converter model WTGT_A Simplified Drive Train WTGAR_A Aerodynamic Model WTGPT_A Pitch Control Model WTGTQ_A Torque Control Model lhvrt Voltage/Frequency Protection Model (any generator model)
WT3
PV1X
WT4

New Features Available for WT3 and WT4 Modeling
Controlled reactive current during and after LVRT event User-defined inverter time constants Options for different control implementations
– Dynamic reactive current limits – Voltage dip logic Separation of slower plant controls from faster converter
controls Additional functionality for active (droop) and reactive (droop,
line drop compensation) controls
WECC REMTF Wind and Solar Modeling Update, October 3, 2012

New WT3/WT4 Model Testing
WECC REMTF Wind and Solar Modeling Update, October 3, 2012
Initial validation – good news
Source: Pourbeik
ABB – WT3 Vestas – WT3

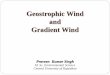
Solar Models
Copper Mountain 48 MW PV plant in Nevada (Picture: inhabitat.com)

PV Plant Power Flow Representation
How to equivalent collector system parameters? – Estimate based on typical design parameters – Calculate from as-built collector system design data – Adjust based on field data
Useful Reference: WECC Guide for Representation of Photovoltaic Systems in Large-Scale Load Flow Simulations
33

Dynamic Models for PV Plants
Level of detail consistent with application – Positive-sequence – Steady-state to 5 Hz (faster dynamics expressed
algebraically or ignored) – For PV, key dynamic modeling aspects are inverter current
limits, LV logic, and plant controls Current situation
– Vendor-specific models exist, mostly proprietary – Generic models under development – Ref: WECC REMTF, “Generic Solar Photovoltaic System Dynamic Simulation
Model Specification”, 2012
34

REMTF Dynamic Models for PV
In power flow, PV modeled explicitly as generator
Should include feeder or collector system equivalent per WECC guide
In dynamics, use stand-alone full-featured or simplified model
Simplified (PVD1 ) Full-Featured Model (PV1X) OR
÷
Vt
N
D×
Q Priority (Pqf lag =0)Iqmax = ImaxTDIqmin = - IqmaxIpmax = (ImaxTD2- Iqcmd2)1/ 2
P Priority (Pqf lag =1)Ipmax = ImaxTDIqmax = (ImaxTD2- Ipcmd2)1/ 2
Iqmin = - Iqmax
÷
0
Ipmax
Iqmin
Iqmax
0.01
N
D
×
Vt0 Vt1 Vt2 Vt3
1
0
V0 V1
DqdvQmx
QmnQref
Vrf lag
Freq
Ft0 Ft1 Ft2 Ft3
1
0
Frf lag
Ip
Iq
It = Ip +j Iq
-11 + sTg
11 + sTg
Ipcmd
Iqcmd
PVD1
XcIt
Qref
-Freq_ref Ddn
fdbdPdrp
Pref
Pext
Pdrp
Fvl
Ffh
Ff l
MINIMUM
Fvh
FvlFfhFf l Fvh
35
Q Control
P Control
Current Limit Logic
IqcmdIqcmd’
IpcmdIpcmd’
Generator Model
Network Solut ion
Plant Level V/ Q Control
Plant Level P Control
VrefVreg
QrefQbranch
PrefPbranchFreq_ref
Freg
Qext
Pref
REPC_A
Pqf lag
REEC_B REGC_AVt Vt
Iq
Ip

PV1X (Central System) Model Structure
Designed to be used with equivalent power flow model Very similar to REMTF generic WT4 WTG model Voltage and frequency protection limits represented separately
36
Q Control
P Control
Current Limit Logic
IqcmdIqcmd’
IpcmdIpcmd’
Generator Model
Network Solut ion
Plant Level V/ Q Control
Plant Level P Control
VrefVreg
QrefQbranch
PrefPbranchFreq_ref
Freg
Qext
Pref
REPC_A
Pqf lag
REEC_B REGC_AVt Vt
Iq
Ip

PV Plant Controller
37
REPC_A
1
0
Vreg
Vref
Freeze state if Vreg < Vfrz
Ibranch
Kc
-
Qbranchemax
emin
Kp + Ki s
pqmax
pqmin
1 + s Tf t1 + s Tfv QextRefFlag
dbd
11 + sTf lt r
VcompFlag|Vreg – (Rc+jXc)· Ibranch|
11 + sTf lt r
1
0
Qref
-
femin
femaxPbranch
Plant_pref
Ddn
Dup
0
0Freq_ref
- fdbd1,fdbd2
- Kpg + Kig s
Pmax
PminFreg
11 + sTp
11 + sTlag Pref
Closed loop voltage regulation with line drop comp. and voltage droop Closed loop reactive power regulation Governor response (droop) with separate up/down regulation

Inverter P/Q Electrical Controls
38
Local reactive control options (PF, Q control), voltage dip response Active power absolute and rate limit Converter current limit with P/Q priority
Current Limit LogicQ Priority (Pqf lag =0): Ipmax = (Imax2- Iqcmd2)1/ 2, Ipmin = 0 Iqmax = Imax, Iqmin = - IqmaxP Priority (Pqf lag =1): Ipmax = Imax, Ipmin = 0 Iqmax = (Imax2- Ipcmd2)1/ 2, Iqmin = - Iqmax
÷ Ipcmd11 + sTpord
Pmax & dPmax
Pmin & dPmin
Iqcmd
÷
Iqmax
Iqmin
Iqh1
Iql1
Kqvdbd1,dbd2
Vref0
Vt -
iqinj
REEC_B
pfaref
×
tan Qmin
Qmax11 + sTpPe 1
0
PfFlag
Qext Qgen
-Kqp + Kqi s
Vmax
Freeze state if Voltage_dip = 1Vmin
1
0Vmin
Vf lag VmaxIqmax
Kvp + Kvi s
Freeze state if Voltage_dip = 1Iqmin
11 + sTrv
Vt_f ilt
if (Vt < Vdip) or (Vt > Vup) Voltage_dip = 1else Voltage_dip = 0
Current Limit Logic
1
0
QFlag
-
Vt_f ilt 0.01
11 + sTiq Freeze state if
Voltage_dip = 1
Vt_f ilt0.01
Ipmax
Ipmin =0
Imax
Pqf lag
Freeze state if Voltage_dip = 1
Pref

Generator/Converter Model
High voltage Iq logic (software specific) Low voltage Ip management (approximate PLL response during voltage dips) Low voltage Ip logic to allow for controlled active current response during and
following voltage dips
39
REGC_A
Ipcmd 11 + sTg
LVPL & rrpwr
÷
lvpnt0 lvpnt1
gain
V
1
0×
Ipejπ/ 2
LOW VOLTAGE ACTIVE CURRENT
MANAGEMENT Vt
Iqcmd -11 + sTg
Iq×
Volim
-Khv
0
0
Vt ≤ Volim Vt > Volim
HIGH VOLTAGE REACTIVE CURRENT MANAGEMENT
Iolim
Vt
-
V
Zerox Brkpt
Lvpl1
LVPL
V
LOW VOLTAGE POWER LOGIC
0
1
Lvplsw1
1 + sTf lt r
Igen
Iqrmin
Iqrmax

Simple Dynamic Model (PVD1)
40
÷
Vt
N
D×
Q Priority (Pqf lag =0)Iqmax = ImaxIqmin = - IqmaxIpmax = (Imax2- Iqcmd2)1/ 2
P Priority (Pqf lag =1)Ipmax = ImaxIqmax = (Imax2- Ipcmd2)1/ 2
Iqmin = - Iqmax
÷
0
Ipmax
Iqmin
Iqmax
0.01
N
D
×
Vt0 Vt1 Vt2 Vt3
1
0
V0 V1
DqdvQmx
QmnQref
vrrecov
Freq
Ft0 Ft1 Ft2 Ft3
1
0
f rrecov
Ip
Iq
It = Ip +j Iq
-11 + sTg
11 + sTg
Ipcmd
Iqcmd
PVD1
XcIt
Qref
-Freq_ref Ddn
fdbdPdrp
Pref
Pext
Pdrp
Fvl
Ffh
Ff l
Fvh
Fvl
Ffh
Ff l
Fvh
×
Reactive power control with Q-V droop and line drop compensation Active power (high) frequency droop Voltage-frequency protection with deadband and recovery logic
Intended for use with a smaller PV plant or distribution-connected MW-scale plant

Distributed PV Power Flow Model
High penetration PV may warrant explicit power flow modeling
Challenge is to capture salient behavior without excessive model data requirements
41

Distributed PV Model Structure
WECC REMTF working on a model formulation based on WECC composite load model (CMPLDW)
42
In power flow, PV is netted with load, as described in previous slide In dynamics, load & PV are modeled behind an LTC + feeder model Different dynamic models are used for different load components & PV


Sanity Checks for Large Dynamics Cases Eric H. Allen
October 3, 2012

2
RELIABILITY | ACCOUNTABILITY
Basic Rules for Cases
• Study models for dynamics should be stable! We do not regularly observe growing oscillations on the
power system
System returns to quasi-equilibrium after a minor disturbance and stays there
• Study models for dynamics should initialize within limits! Violation of limits in a steady-state condition indicates that
powerflow data or dynamics data (or both) have errors

3
RELIABILITY | ACCOUNTABILITY
Machines with No Models
• Options: Generic models or load netting
• Preferable to use generic models (even for small units) Those small units add up!
Accuracy of oscillatory modes may be lost
Generic models can be added systematically in a single step
Improves network convergence by maintaining voltage sources throughout the network, reducing simulation time
CON conservation models (GENROA, GENSAA) can be used o Minimal additional data
o Marker to indicate generic vs. unit-specific data

4
RELIABILITY | ACCOUNTABILITY
Generic Models vs. Netting
Generic Netting Recorded

5
RELIABILITY | ACCOUNTABILITY
Initialization
• Process of starting a time-domain simulation
• Dynamics data matched to a powerflow condition
• Initial value of all state variables is calculated for the particular powerflow condition
• If any value falls outside limits prescribed by a model, a simulation should not be run Identify and fix the problem!!

6
RELIABILITY | ACCOUNTABILITY
Examples of Poor Initialization
• Machine field voltage = 82.2 p.u.
• Machine field voltage = -1.4 p.u.
• Machine terminal voltage = 1.50 p.u.
• Machine terminal voltage = 0.79 p.u.

7
RELIABILITY | ACCOUNTABILITY
Common Initialization Errors
• Exciter model limits incompatible with powerflow
• Governor model limits incompatible with powerflow
• Incorrect machine base value This critical dynamics parameter is carried with the
powerflow data in some programs
• Faulty generator data X’d > Xd , X’’d > X’d , Xl > X’’d are physically impossible!
Can be cause of exciter initialization errors

8
RELIABILITY | ACCOUNTABILITY
Common Initialization Errors
• MANY DYNAMICS INITIALIZATION PROBLEMS ARE A RESULT OF POWERFLOW DATA ERRORS Pmax, Pmin errors (or dispatch in ignorance of limits)
Qmax, Qmin errors
Machine base
Transformer impedance
Stator impedance (0.56 is not a credible value for resistance!)
• Limits in powerflow data should always be equally or more restrictive than limits in dynamics data Continuous operation implies a lower rating than a
temporary transient or overload condition

9
RELIABILITY | ACCOUNTABILITY
Common Initialization Errors
• MANY DYNAMICS INITIALIZATION PROBLEMS ARE A RESULT OF POWERFLOW DATA ERRORS
• Therefore, a powerflow case should not be deemed acceptable until it has been successfully initialized with dynamics data Otherwise, studies using the powerflow model may reach
inaccurate conclusions due to inaccurate limits

10
RELIABILITY | ACCOUNTABILITY
Standard Dynamics Case Tests
1. No-fault simulation As name says, simulation run with no fault (or any other
event)
System states should remain constant
2. Disturbance (ringdown) simulation(s) Application of a fault at a strategic location for a few cycles,
followed by removal of fault without any topological changes (i.e. no line switching)
System should return to essentially where it started

11
RELIABILITY | ACCOUNTABILITY
Evaluation of Tests
• Comparison of powerflow at end of simulation with the powerflow at beginning of simulation Generator MW
Generator MVAR
Line MW and MVAR
Voltage magnitude
• Plots of key voltages, angles, MW, MVAR

12
RELIABILITY | ACCOUNTABILITY
How Long to Simulate?
1. No-fault test – 20 s Based on experience, 20 s is the amount of time needed for
component model problems to appear (if they’re going to appear in this test)
2. Disturbance (ringdown) tests – 60 s 60 s is the amount of time needed for the system dynamics
to return to equilibrium and thus permit a suitable powerflow to be extracted from the simulation

13
RELIABILITY | ACCOUNTABILITY
No-fault Test
• Standard test for dynamics test
• Initial screening of case
• Necessary but not sufficient to demonstrate that the case is ready for use in studies
• Many egregious data errors have been observed that did not show up in no-fault simulations

14
RELIABILITY | ACCOUNTABILITY
Disturbance Tests
• Stronger test for stability of dynamics cases
• Rigor of these tests are comparable to contingency simulations Demonstrate robustness of case
• In 10+ years experience, every instance of failure of a 60 s disturbance test has resulted from data errors that require correction

15
RELIABILITY | ACCOUNTABILITY
Disturbance Test

16
RELIABILITY | ACCOUNTABILITY
Component Model Tests
• Exciter step response test Step change in voltage setpoint
• Governor step response test Step change in load
• Dynamics should settle at new equilibrium following a transient

17
RELIABILITY | ACCOUNTABILITY
Response should look like this …
EFD ETERM

18
RELIABILITY | ACCOUNTABILITY
Not this!
EFD ETERM

19
RELIABILITY | ACCOUNTABILITY
Or this!
EFD ETERM

20
RELIABILITY | ACCOUNTABILITY
Or this!
EFD ETERM

21
RELIABILITY | ACCOUNTABILITY
Or this!
EFD ETERM

22
RELIABILITY | ACCOUNTABILITY
and definitely not like this!
EFD ETERM

23
RELIABILITY | ACCOUNTABILITY
Governor: reasonable response:
SPD PMEC

24
RELIABILITY | ACCOUNTABILITY
Unreasonable response:
SPD PMEC

25
RELIABILITY | ACCOUNTABILITY
Unreasonable response:
SPD PMEC

26
RELIABILITY | ACCOUNTABILITY
Unreasonable responses:
•DATA NEEDS TO BE FIXED! Not ignored!
Not load netted!

System Modeling Problems
NERC Modeling Workshop – Bloomington, MN October 1-3, 2012

2 RELIABILITY | ACCOUNTABILITY
Per-unit System

3 RELIABILITY | ACCOUNTABILITY
Why Per Unit?
1. Simplifies computational efforts
2. Allows for common representation of all system data a. Makes comparison of system data easier (e.g., 230 kV vs.
500 kV, MVA vs. current, etc.)
b. Reduces errors resulting from unit disagreement (e.g., speed vs. frequency)
c. Streamlines combination of system models

4 RELIABILITY | ACCOUNTABILITY
Conversion to Per Unit
•

5 RELIABILITY | ACCOUNTABILITY
Adjusting Per Unit Quantities
•

6 RELIABILITY | ACCOUNTABILITY
Adjusting Per Unit Quantities
•

7 RELIABILITY | ACCOUNTABILITY
Bad Modeling

8 RELIABILITY | ACCOUNTABILITY
Initial Freq. Control Findings
• No system wide tuning strategy being employed
• Prior to interconnections of systems, it was necessary to tune each governor to regulate system frequency in isolation
• The necessity of stable isolated governing has given way in many cases to faster load ramping or AGC control

9 RELIABILITY | ACCOUNTABILITY
Hydro Step-Change Controls

10 RELIABILITY | ACCOUNTABILITY
Re-Tuned Hydro Controls

11 RELIABILITY | ACCOUNTABILITY
Unit 1
8 MVA
Unit 2
8 MVA
Unit 3
8 MVA
Unit 4
24 MVA
115 kV 4.16 kV
46 kV 2.4 kV
46 kV 2.4 kV
46 kV 2.4 kV
46 kV : 115 kV
NLT @ -1 Step
NLT @ +1 Step
±5% NLT @ Neutral Step
NLT @ +1 Step
Plant Voltage Mismatches
Circuit Breaker
1. Step-Up Transformers (GSUs) for the three 8 MVA Generators are not at the same tap settings
Typical Plant Switching Station Bus

12 RELIABILITY | ACCOUNTABILITY
Questions?

Modeling Workshop Wrap-up
NERC Modeling Workshop – Bloomington, MN October 1-3, 2012

2 RELIABILITY | ACCOUNTABILITY
Modeling Standards Update

3 RELIABILITY | ACCOUNTABILITY
MOD-010 through MOD-15
• System Analysis and Modeling Subcommittee (SAMS) has recommended a set of changes to these standards (with MVWG) based on: IVGTF report MVTF report SAMS modeling team standards review and
analysis
• Planning Committee has directed them to develop a Standards Authorization Request (SAR)

4 RELIABILITY | ACCOUNTABILITY
Proj. 2007-09 ― Gen. Verification
New Standards
• PRC-019 – Coordination of Generator Voltage Regulator Controls with Unit Capabilities and Protection
• PRC-024 – Generator Performance During Frequency and Voltage Excursions
• MOD-026 – Verification of Models and Data for Generator Excitation System Functions
• MOD-027 — Verification of Generator Unit Frequency Response

5 RELIABILITY | ACCOUNTABILITY
Proj. 2007-09 ― Gen. Verification
Standard to be Retired (Merged into MOD-025) • MOD-024 — Verification of Generator Gross
and Net Real Power Capability Standard to be Revised • MOD-025 — Verification of Generator Gross
and Net Reactive Power Capability Verification of Net Real Power Capability to be added

6 RELIABILITY | ACCOUNTABILITY
Proj. 2007-09 ― Gen. Verification
MOD-026-1 (draft 4)
PRC-024-1 (draft 4)
Successive Ballot and Non-Binding Poll
• 10/19/12 - 10/29/12
Formal Comment Period
• 09/28/12 - 10/29/12

7 RELIABILITY | ACCOUNTABILITY
Proj. 2007-09 ― Gen. Verification
MOD-025-2 (draft 3)
MOD-027-1 (draft 3)
PRC-019-1 (draft 3)
Successive Ballot and Non-Binding Poll
• 10/19/12 - 10/29/12
Formal Comment Period
• 09/28/12 - 10/29/12

8 RELIABILITY | ACCOUNTABILITY
Proj. 2007-09 ― Gen. Verification
Successive Ballot and Non-Binding Poll
• 10/19/12 - 10/29/12
Formal Comment Period
• MOD-026-1 and PRC-024-1
• 09/28/12 - 10/29/12

9 RELIABILITY | ACCOUNTABILITY
Workshop Wrap-up

10 RELIABILITY | ACCOUNTABILITY
Workshop Wrap-Up
• More high-speed data recorders needed inside power plants Independent of the plant controls Recording electrical and boiler/turbine
control parameters Disturbance measurement recorder is the
only device in a substation that has the potential for telling the truth.

11 RELIABILITY | ACCOUNTABILITY
Workshop Wrap-Up
• A chronological case creation process is needed Distributed or centralized Based on Breaker-Node detail MUST include case shakedown and
testing before release Who to do for Eastern Interconnection?

12 RELIABILITY | ACCOUNTABILITY
Workshop Wrap-Up
• Composite load models need to be promoted Analysis needed for Eastern & ERCOT
Interconnections’ load characteristics Engage NATF, national labs, and EPRI Potential DOE funding

13 RELIABILITY | ACCOUNTABILITY
Workshop Wrap-Up
The use of negligently maintained data, calculated in scrupulously structured programs, in carefully crafted studies, to produce plausible but totally misleading results Bad Modeling Bad Decisions

14 RELIABILITY | ACCOUNTABILITY
Now that you know what you know, what do you intend to do about it?
Sean Connery in the Untouchables

15 RELIABILITY | ACCOUNTABILITY
Questions?
Recommended