Embed Size (px)
Citation preview
ΓΕΛ Σ.Σ. ΜΟΥΡΙΩΝ Β' Λυκείου
«Κατασκευή ρομπότ νερού μικρής κλίμακας (hydrobot). Η αξιοποίησή του για την εξερεύνηση του νερού της λίμνης
Δοϊράνης»
Ερευνητική Εργασία 2014-2015
Υπεύθυνος Εκπαιδευτικός: Βενετόπουλος Παύλος ΠΕ19
ΟΜΑΔΑ 1: ΚΑΤΑΣΚΕΥΕΣ
Κοτακίδου ΠαναγιώταΠροβατίδης Κων/νος
Χαραλαμπίδου ΓεωργίαΣιδηρόπουλος Δημήτριος
ΟΜΑΔΑ 2: ΦΩΤΟΓΡΑΦΙΑ - ΒΙΝΤΕΟ
Ιωάννα Γιαννούλα ΖάλεΣωτήρης Νέτος
Μαρία Βαταμίδου
ΟΜΑΔΑ 4: ΤΕΧΝΙΚΗ ΥΠΟΣΤΗΡΙΞΗ
Εφραιμίδης ΗλίαςΝούκα Αγγελίν
Καλενδέρης ΒασίληςΓκοροβέτσι Διονύσης

ΟΜΑΔΑ 3: ΔΗΜΙΟΥΡΓΟΙ
ΠΑΡΟΥΣΙΑΣΗΣ
Ελένη ΠένουΓκόνου Ελένη
Γεωργίου ΔιαμάντωΧοτζάλλι Σοφία
ΟΜΑΔΑ 4: ΔΗΜΙΟΥΡΓΙΑ ΕΝΗΜΕΡΩΣΗ ΙΣΤΟΛΟΓΙΟΥ
(BLOG)
Καρυπίδης ΠόλυςΠαντελίδου Βαρβάρα
Ηλιάδου ΣταυρούλαΧαλκίδου Μαρία-Συμέλα
Πρώτα από όλα λίγη θεωρία…

Βασικές Αρχές της Φυσικής
Άνωση των ρευστών Άνωση ονομάζεται η συνισταμένη δύναμη που δέχεται ένα σώμα από το ρευστό μέσα στο οποίο βρίσκεται.
Η άνωση …έχει κοινή διεύθυνση με το βάρος του σώματος και αντίθετη φορά.…εκδηλώνεται σε κάθε σώμα που βρίσκεται εντός ρευστού, παρουσία βαρυτικού πεδίου και γίνεται αντιληπτή ως δύναμη που δρα αντίθετα στο βάρος.…αναφέρεται σε συστήματα που βρίσκονται σε ηρεμία. Η μελέτη του φαινομένου της άνωσης εμπίπτει στον κλάδο της φυσικής που ονομάζεται "στατική των ρευστών".
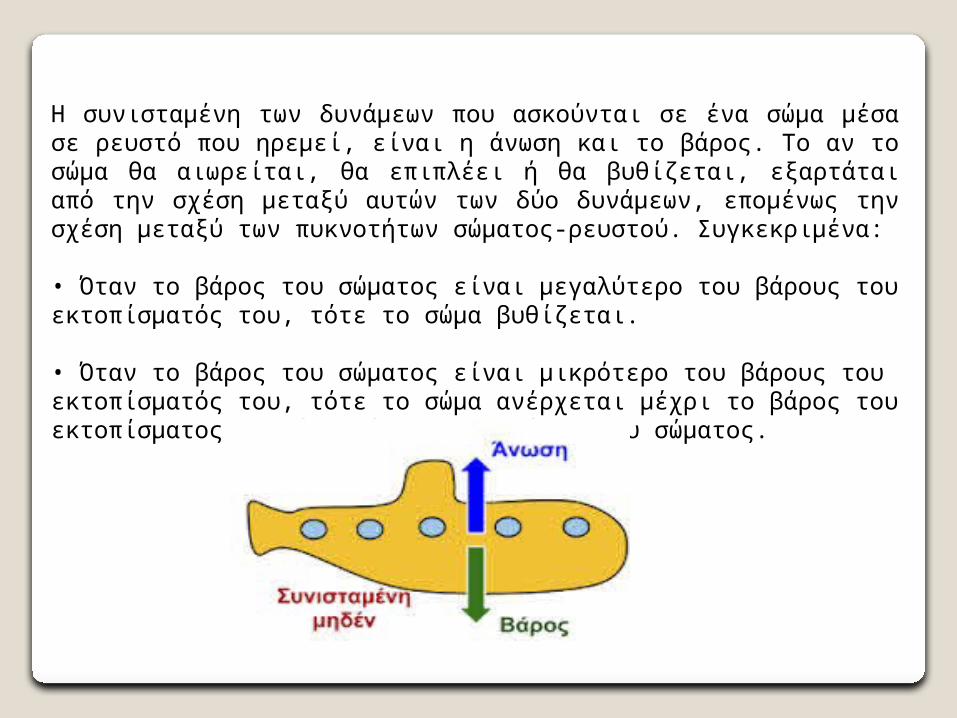
Η συνισταμένη των δυνάμεων που ασκούνται σε ένα σώμα μέσα σε ρευστό που ηρεμεί, είναι η άνωση και το βάρος. Το αν το σώμα θα αιωρείται, θα επιπλέει ή θα βυθίζεται, εξαρτάται από την σχέση μεταξύ αυτών των δύο δυνάμεων, επομένως την σχέση μεταξύ των πυκνοτήτων σώματος-ρευστού. Συγκεκριμένα:
• Όταν το βάρος του σώματος είναι μεγαλύτερο του βάρους του εκτοπίσματός του, τότε το σώμα βυθίζεται.
• Όταν το βάρος του σώματος είναι μικρότερο του βάρους του εκτοπίσματός του, τότε το σώμα ανέρχεται μέχρι το βάρος του εκτοπίσματος να γίνει ίσο με το βάρος του σώματος.
Ηλεκτρική Ενέργεια
Η ηλεκτρική ενέργεια είναι η ενέργεια που μεταφέρει το ηλεκτρικό ρεύμα, που αναφέρεται στην κινητική ενέργεια των κινούμενων ηλεκτρονίων (ηλεκτρικό ρεύμα), λόγω της ύπαρξης διαφοράς δυναμικού στα άκρα ενός αγωγού. Η πλειονότητα των συσκευών λειτουργεί με ηλεκτρικό ρεύμα. Τα πλεονεκτήματα της ηλεκτρικής ενέργειας είναι: • Είναι καθαρή ενέργεια. • Μεταφέρεται εύκολα. • Δεν απαιτεί χώρο αποθήκευσης. • Υπάρχουν πολλές συσκευές που λειτουργούν με ηλεκτρικό ρεύμα. • Σήμερα υπάρχει εξέλιξη των μπαταριών που την κάνει εξαιρετικά εύχρηστη και σε φορητές συσκευές.

Ηλεκτρικός ΚινητήραςΟ Ηλεκτρικός κινητήρας ή ηλεκτροκινητήρας, κοινώς μοτέρ, είναι διάταξη που χρησιμοποιείται για την μετατροπή της ηλεκτρικής ενέργειας σε μηχανική ενέργεια. Δεν είναι τίποτε άλλο παρά μια μηχανή που δημιουργεί κίνηση καταναλώνοντας ηλεκτρισμό. Σ' έναν απλό ηλεκτροκινητήρα, το ηλεκτρικό ρεύμα διαρρέει μια συρμάτινη περιέλιξη η οποία βρίσκεται ανάμεσα στους πόλους ενός μαγνήτη. Όμως κάθε ρευματοφόρος αγωγός, που βρίσκεται μέσα σε μαγνητικό πεδίο, δέχεται κάποια δύναμη. Ο μαγνήτης που δημιουργεί το μαγνητικό πεδίο μπορεί να είναι μόνιμος ή ηλεκτρομαγνήτης.
Σχηματικό διάγραμμαλειτουργίας ηλεκτρικούκινητήρα

Είδη ηλεκτροκινητήρων:
Οι ηλεκτροκινητήρες διακρίνονται σε δύο βασικές κατηγορίες στους:
• Κινητήρες συνεχούς ρεύματος • Κινητήρες εναλλασσόμενου ρεύματος
Οι κινητήρες εναλλασσόμενου ρεύματος με τη σειρά τους διακρίνονται σε:
• Μονοφασικούς κινητήρες • Πολυφασικούς κινητήρες

Υποθαλάσσια Σκάφη Ερευνών
Το υποβρύχιο είναι είδος σκάφους που έχει τη δυνατότητα να κινείται πάνω και κάτω από την επιφάνεια της θάλασσας.

Ένα υποθαλάσσιο όχημα ερευνών είναι μια κινητή, αυτοκινούμενη, τηλεκατευθυνόμενη ή τηλεχειριζόμενη πλατφόρμα, ικανή να μεταφέρει αισθητήρες και εργαλεία.
Υπάρχουν τρεις γενικές κατηγορίες τέτοιων οχημάτων:
1. Βαθιά υποβρύχια οχήματα (DSV),
2. Τηλεκατευθυνόμενα οχήματα (ROV)
3. Αυτόνομα υποβρύχια οχήματα (AUV)
Χρήσεις: Δειγματοληψία, ωκεανογραφία, αποτύπωση του βυθού, έλεγχος υποθαλάσσιων συστημάτων, ανίχνευση και εξουδετέρωση ναρκών είναι μερικές μόνο από τις πολλές εφαρμογές αυτών των σκαφών.
1. Βαθιά υποβρύχια οχήματα (DSV) Deep Sea Submarine
Τα DSV είναι επανδρωμένοι ανιχνευτές βυθού που συνήθως καλύπτουν μεγαλύτερη κάθετη από ότι οριζόντια απόσταση για την επίτευξη επιστημονικών αποστολών.

Η Alvin είναι το παλαιότερο DSV στην υπηρεσία και έχει ολοκληρώσει το μεγαλύτερο αριθμό των καταδύσεων. Ανήκει και λειτουργεί στο Ωκεανογραφικό Ινστιτούτο Woods Hole (WHOI).

Το αμερικάνικο πυρηνικό ερευνητικό DSV NR1 με το μητρικό πλοίο Carolyn της Suess συμμετείχε σε τρία μεγάλα προγράμματα αρχαιολογίας βαθέων υδάτων στην ακτή Skerki (Σικελία Straits), ανοιχτά της Αιγύπτου και της Λωρίδας της Γάζας (Ashkelon Project) και στο Ιόνιο Πέλαγος.

2. Τηλεκατευθυνόμενα οχήματα (ROV) Remotely operated underwater vehicle

Τα ROV είναι μη επανδρωμένα υποβρύχια, προσδεδεμένα με καλώδια, που μεταφέρουν δεδομένα από αισθητήρες και εντολές ελέγχου. Το εύρος τιμών βάθους για τα ROV είναι από λίγα μέτρα έως 11000 μέτρα. Το 1998, το ROV Jason που ανήκει στη WHOI σε μια από τις πρώτες επιχειρησιακές αναπτύξεις του, εξερεύνησε και κατέγραψε ένα ρωμαϊκό ναυάγιο γνωστό ως "Isis" κοντά στις όχθες του Skerki.
3. Αυτόνομα υποβρύχια οχήματα (AUV)
• Τα AUV είναι μη επανδρωμένα υποβρύχια, χωρίς καλώδια τροφοδοσίας. Όλη η ενέργεια παρέχεται από ενσωματωμένα συστήματα ενέργειας, όπως μπαταρίες ή κυψέλες καυσίμου και είναι προγραμματισμένο, για την επίτευξη προκαθορισμένων εργασιών.
• Η χρήση ενός συστήματος AUV είναι μια επαναστατική έννοια στην οποία ο χρήστης έχει πολύ μικρό, ή και καθόλου έλεγχο του συστήματος, για όσο πραγματοποιεί την εργασία του.
Για στρατιωτικές αποστολές τα Αυτόνομα Υποβρύχια Οχήματα συχνά αναφέρονται ως: Υποβρύχια Οχήματα χωρίς άνθρωπο (unmanned undersea vehicles (UUVs).

ΕΦΑΡΜΟΓΕΣ ΤΩΝ ΑΥΤΟΝΟΜΩΝ ΥΠΟΒΡΥΧΙΩΝ ΟΧΗΜΑΤΩΝ
Εμπορικές εφαρμογέςΗ βιομηχανία πετρελαίου και αερίου χρησιμοποιεί τα αυτόνομα υποβρύχια οχήματα για να δημιουργήσει λεπτομερείς χάρτες του θαλάσσιου πυθμένα, πριν προχωρήσει στην κατασκευή υποθαλάσσιας υποδομής. Αγωγοί και υποθαλάσσιες κατασκευές μπορούν να δημιουργηθούν με τον πιο οικονομικά αποδοτικό τρόπο και με την ελάχιστη δυνατή αναστάτωση για το περιβάλλον.

Έρευνα
Οι επιστήμονες χρησιμοποιούν τα AUVs για να μελετήσουν τις λίμνες, τον ωκεανό και το πυθμένα του ωκεανού. Μια ποικιλία από αισθητήρες μπορούν να τοποθετούνται στα AUVs για να μετρηθεί η συγκέντρωση διαφόρων στοιχείων ή ενώσεων, η απορρόφηση ή η αντανάκλαση του φωτός και η παρουσία της μικροσκοπικής ζωής.
Ερευνητές του MIT ανέπτυξαν ένα μικρό AUV εξοπλισμένο με Τεχνητή Νοημοσύνη
Πανεπιστήμιο της Φλόριντα στις ΗΠΑ ανέπτυξε ένα πρότυπο ηλιακό AUV με όνομα Tavros02.

Χόμπι - Ψυχαγωγία
Πολλοί κατασκευάζουν AUVs ως χόμπι. Αρκετοί διαγωνισμοί παγκοσμίως δίνουν τη δυνατότητα σε ερασιτέχνες κατασκευαστές AUVs να ανταγωνίζονται μεταξύ τους, μέσω της ολοκλήρωσης αποστολών. Όπως και στα εμπορικά-επαγγελματικά AUVs, υπάρχει η δυνατότητα να είναι εφοδιασμένα με κάμερες, φώτα ή σόναρ (αισθητήρες υπερήχων). Οι διαφορές των ερασιτεχνικών με τα επαγγελματικά AUVs είναι ότι η επιχειρησιακή τους δράση είναι σαφώς περιορισμένη και ότι λειτουργούν τις περισσότερες φορές σε πισίνες και λίμνες.
ΠΡΟΤΑΣΕΙΣ ΓΙΑ ΠΕΡΑΙΤΕΡΩ ΑΝΑΠΤΥΞΗ
ΠΡΟΣΘΗΚΗ ΑΙΣΘΗΤΗΡΩΝ (Sensors)

ΑΙΣΘΗΤΗΡΑΣ ΠΙΕΣΗΣ
Ο αισθητήρας πίεσης χρησιμοποιείται και για τον υπολογισμό του βάθους. Πέρα από τους βασικούς
αυτούς αισθητήρες, η μονάδα έρχεται επιπλέον με ένα RTC (Real Time Clock) για να καταγράφεται η ώρα και η ημερομηνία, καθώς και με μια SD κάρτα στην οποία
και αποθηκεύονται τα δεδομένα των μετρήσεων.

ΑΙΣΘΗΤΗΡΑΣ ΘΕΡΜΟΚΡΑΣΙΑΣ
… μετράει τη θερμοκρασία

ΑΙΣΘΗΤΗΡΑΣ ΥΠΕΡΗΧΩΝ
… για τον υπολογισμό απόστασης.

ΑΙΣΘΗΤΗΡΑΣ ΕΠΙΤΑΧΥΝΣΗΣ

ΚΑΤΑΣΚΕΥΗ HYDROBOT
Εργαλεία κατασκευής του HYDROBOT
● Μέτρο● Μαρκαδόρος● Κόφτης σωλήνα PVC● Σταυροκατσάβιδο● Δράπανο ηλεκτρικό● Τρυπάνι 6mm● Τρυπάνι 2mm● Μέγγενη● Διαλυτικό● Πένσα● Ψαλίδι
● Κολλητήρι● Μάτι και μπρίκι● 2 κροκοδειλάκια● Κατσαβίδι● Μυτερή πένσα

Υλικά κατασκευής του υδρορομπότ
● 1 σωλήνας PVC μήκους 30,8 cm● 3 σωλήνες PVC μήκους 33,2 cm● 10 γωνίες PVC διαμέτρου 22 mm● 4 λευκά «Τ» από PVC, διαμέτρου 22 mm● 1 πλαστικός ηλεκτρολογικός σωλήνας 40
cm● 2 κυλινδρικοί πλωτήρες πλεύσης● 3 μεταλλικές βάσεις για τους κινητήρες● 6 βίδες νούμερο 6, 1/2 ίντσας● 6 ροδέλες νούμερο 6● Πλαστικό δίχτυ● Πλαστικοί δεσμοί (zip ties)
● Μπλε καλώδιο τηλεχειρισμού 10 m
● 3 πλαστικά δοχεία με τα καπάκια τους
● 3 κινητήρες 12 Volt DC● 3 πλαστικές προπέλες● 3 μεταλλικοί άξονες για τις
προπέλες● 6 μικρά παξιμάδια για βίδες (#4-
40)● Εποξική κόλλα και ξυλάκι
ανάδευσης της κόλλας● Μονωτική ταινία● Μαύρο μαλακό λάστιχο από
βουτύλιο● Κόκκινο καλώδιο● Μπαταρία 12 V
ΣΤΑΔΙΑ ΚΑΤΑΣΚΕΥΗΣ
Κατασκευή 1ου Μέρους: Σκελετός του Οχήματος

Βήμα 1ο: Κοπή των τμημάτων του Σκελετού


Βήμα 2ο: Δημιουργία Οπών για την Εισροή/Εκροή Νερού στον Σκελετό

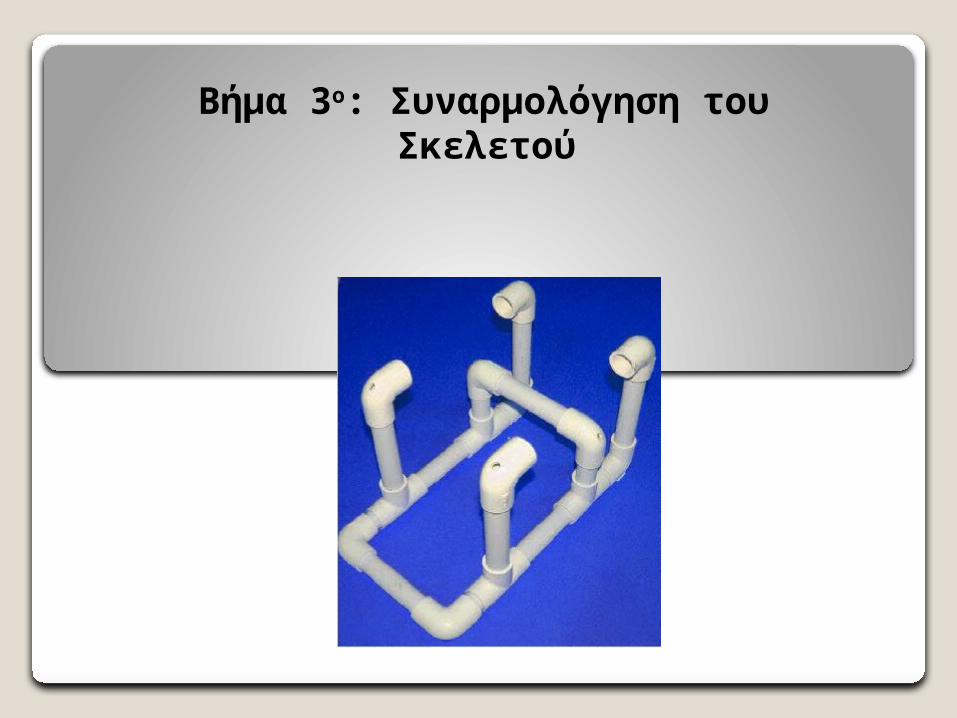
Βήμα 3ο: Συναρμολόγηση του Σκελετού


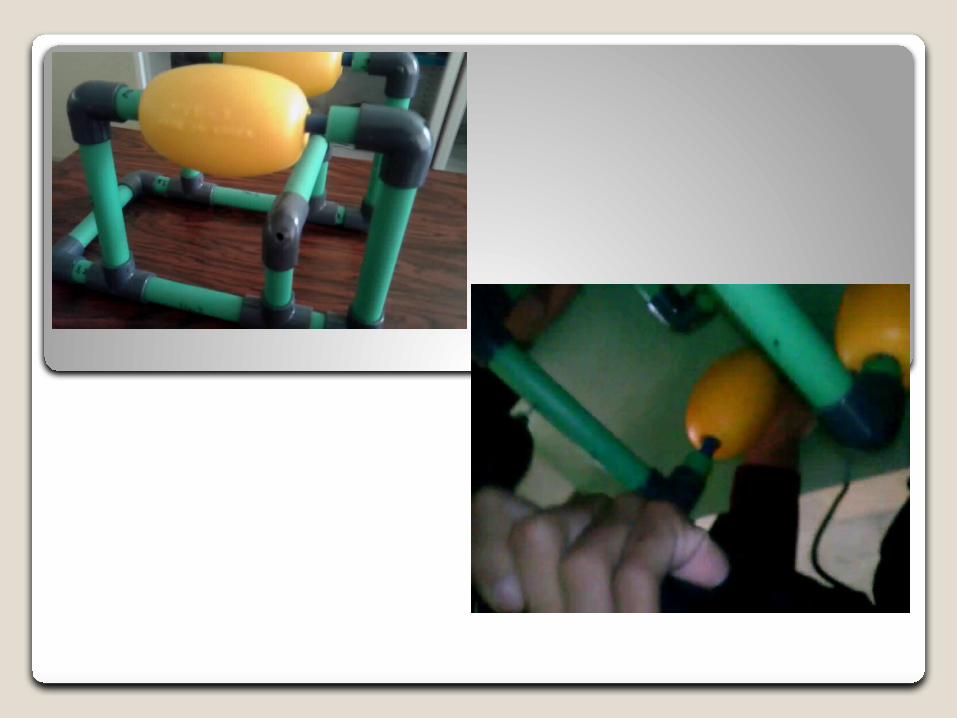
Βήμα 4ο: Συναρμολόγηση του Μηχανισμού Πλεύσης και Σύσφιξη του Σκελετού
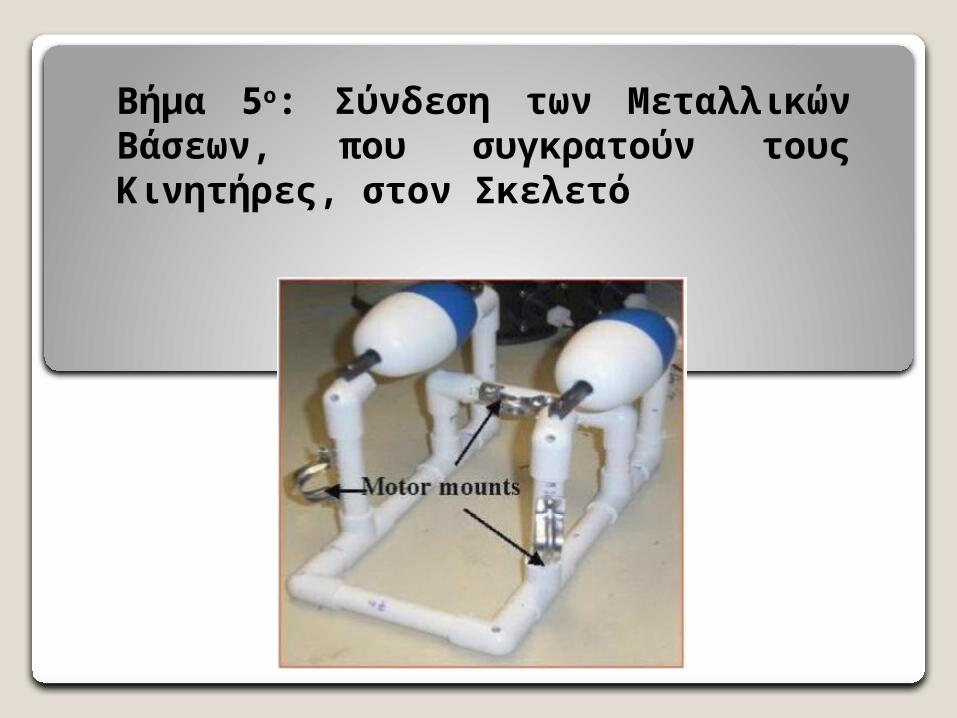
Βήμα 5ο: Σύνδεση των Μεταλλικών Βάσεων, που συγκρατούν τους Κινητήρες, στον Σκελετό


Βήμα 6ο: Ένωση του Πλαστικού Διχτυού στη Βάση του Σκελετού


ΤΕΛΙΚΗ ΜΟΡΦΗ ΣΚΕΛΕΤΟΥ
ΣΤΑΔΙΑ ΚΑΤΑΣΚΕΥΗΣ
Κατασκευή 2ου Μέρους: Συναρμολόγηση Συστήματος
Προώθησης

Κροκοδειλάκια (alligator clips)
Κινητήρες καλυμμένοι με μονωτική ταινία

Επιμέρους καλώδια, του κεντρικού
καλωδίου τηλεχειρισμού,
συγκολλημένα στον κινητήρα.
Στεγανοποιημένος Κινητήρας

Άξονας με προπέλα Μόνωση του καλωδίου χειρισμού
ΣΤΑΔΙΑ ΚΑΤΑΣΚΕΥΗΣ
Κατασκευή 3ου Μέρους: Συναρμολόγηση Τηλεχειριστηρίου

Κουτί Ελέγχου

Τελική μορφή της κατασκευής
Βίντεο από την πλεύση

Διεύθυνση ιστολογίου
http://hydrobotmouries.blogspot.gr/