Embed Size (px)
Citation preview
PESAWAT ATWOOD
Rezki Amaliah*), Muh. Aditya Junaid, Nurqamri Putri Basofi, Rachmat Permata, Qur’aniah Ali.
Fisika Dasar, Geografi 2015
Fakultas Matematika Dan Ilmu Pengetahuan Alam
Abstrak
Telah dilakukan percoban yang berjudul Pesawat Atwood. Adapun tujuan dari percobaan tersebut adalah mampu memehami konsep kinematika untuk memperlihatkan berlakunya hukum Newton dan dan menghitung momen kelembaman (inersia) katrol. Pada kegiatan pertama menambahkan beban tambahan m pada M2, maka M2+m akan bergerak kebawah (C – A) mengalami gerak lurus berubah beraturan (dipercepat), kegiatan pertama juga mencari dan membandingkan nilai percepatan menggunakan 3 cara yakni: (1) Grafik; (2) Perhitungan; dan (3) memanipulasi persamaan 3.4, dengan menggunakan nilai percepatan diatas, dapat pula diketahui momen kelembaman (inersia) katrol. Adapun kegiatan kedua hal yang sama dilakukan seperti pada kegiatan petama namun dilakukan pada lintasan A - B yang mengalami gerak lurus beraturan (GLB), kegiatan dua juga membandingkan nilai kecepatan menggunakan 2 cara yakni: (1) Grafik; dan (2) Persamaan GLBB.
Kata kunci: percepatan, momen inersia, kecepatan
RUMUSAN MASALAH
1. Bagaimanakah konsep kinematika untuk memperlihatkan berlakunya
hukum Newton ?
2. Bagaimana cara menghitung momen kelembaman (inersia) katrol ?
TUJUAN
1. Mahasiswa mampu memahami konsep kinematika untuk
memperlihatkan berlakunya hukum Newton
2. Menghitung momen kelembaman (inersia) katrol
METODOLOGI EKSPERIMEN
Teori Singkat
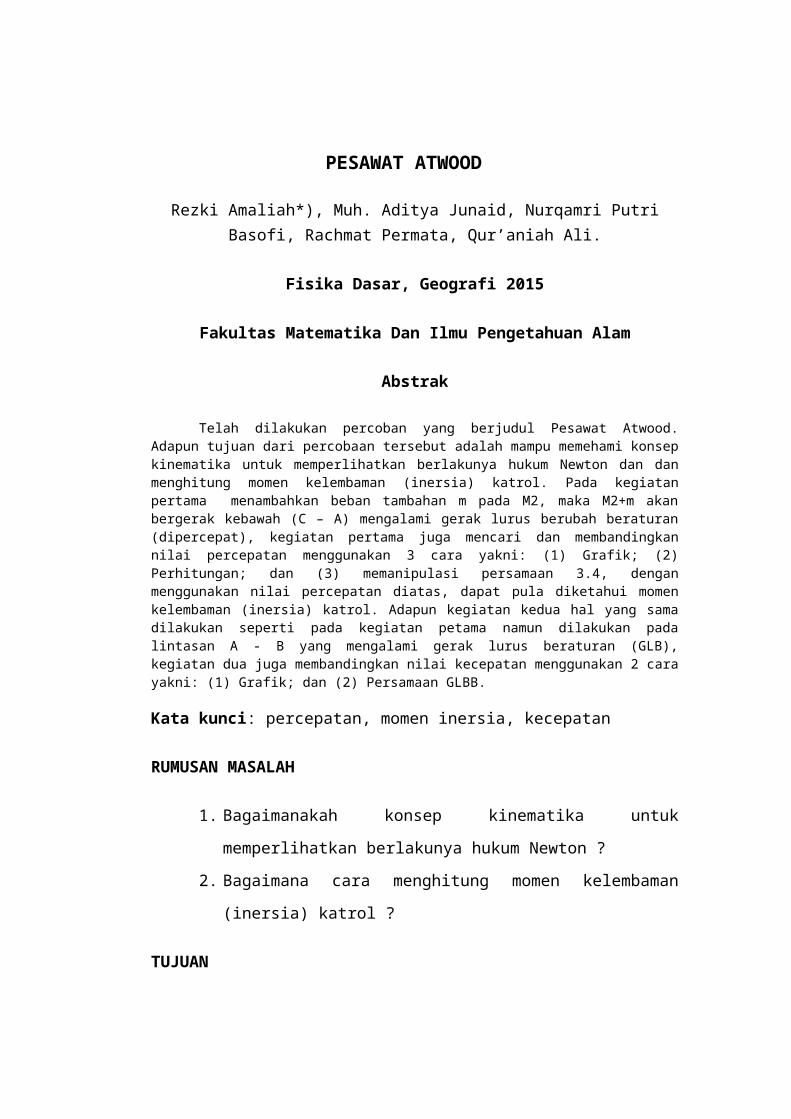
Jika sebuah katrol hanya dapat berotasi murni pada porosnya yang diam,
maka geraknya dapat dianalisis dengan menggunakan gambar
N
Gerak Translasi
∑ F = 0
−T 1−mg−T 2+N=0
Gerak Rotasi
∑ τ= I . α
mg
−¿ T1 R + T2 R = I α
dimana I = ½ m katrol R2
T1 T2
dan α= 1 / R α
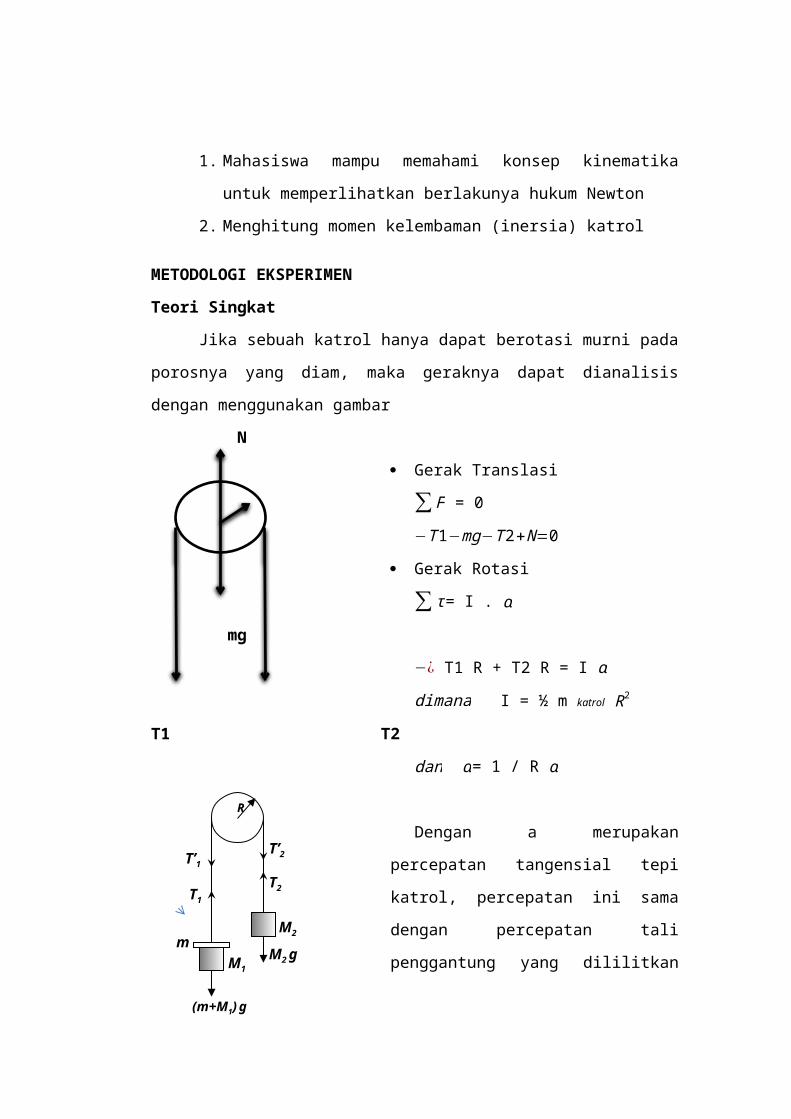
Dengan a merupakan percepatan
tangensial tepi katrol, percepatan ini sama
dengan percepatan tali penggantung yang
dililitkan pada katrol tanpa slip. Bila suatu
benda digantungkan pada tali seperti gambar
berikut, maka percepatan benda adalah :
a = ( m + M1 ) – M2 g .............. (3.4)
m + M1 + M2 + I / R2
Jika beban tidak sama maka system akan bergerak lurus dipercepat
beraturan. Dengan mengukur jarak yang ditempuh serta mengukur waktu yang
diperlukan kita dapat menentukan percepatan beban dari percobaan.
Jika percepatan telah diketahui maka kita dapat menghitung momen
inersia katrol. Jika massa beban sama, maka system akan bergerak lurus beraturan
atau diam (hukum I Newton). Jika pada awalnya system telah memiliki kecepatan
(dalam keadaan bergerak), maka kecepatan awal tersebut dapat ditentukan dengan
mengukur jarak tempuh dan waktu tempuh benda. [1]
1. Hukum I Newton
R
T’1
T1T2
T’2
M2 g
(m+M1) g
M2
M1
m
“Sebuah benda akan berada dalam keadaan diam atau bergerak
lurus beraturan apabila resultan gaya yang bekerja pada benda sama
dengan nol”.
Secara matematis, Hukum I Newton dinyatakan dengan
persamaan:
F=0
Hukum diatas menyatakan bahwa jika suatu benda mula-mula
diam maka benda selamanya akan diam. Benda hanya akan bergerak jika
pada suatu benda itu diberi gaya luar. Sebaliknya, jika benda sedang
bergerak maka benda selamanya akan bergerak, kecuali bila ada gaya yang
menghentikannya.
2. Hukum II Newton
“setiap benda yang dikenai gaya maka akan mengalami percepatan
yang besarnya berbanding lurus dengan besarnya gaya dan berbanding
terbalik dengan besarnya massa benda”.
a= Fm
F=m.a
Keterangan : a = percepatan benda m/s2
m = massa benda (kg)
F = Gaya (N)
Kesimpulan dari persamaan diatas yaitu arah percepatan benda
sama dengan arah gaya yang bekerja pada benda tersebut. Besarnya
percepatan sebanding dengan gayanya. Jadi bila gayanya konstan, maka
percepatan yang timbul juga akan konstan. Bila pada benda bekerja gaya,
maka benda akan mengalami percepatan, sebaliknya bila kenyataan dari
pengamatan benda mengalami percepatan maka tentu akan ada gaya yang
menyebabkannya.
3. Hukum III Newton
“Apanila benda pertama mengerjakan gaya pada benda ke dua
(aksi) maka benda kedua akan mengerjakan gaya pada benda pertama
sama besar dan berlawanan arah dengan gaya pada benda pertama
(reaksi)”.
F Aksi= −FReaksi
Suatu benda gaya disebut aksi-reaksi apabla memenuhi syarat
sebagai berikut:
a. Sama besar
b. Berlawanan arah
c. Bekerja pada satu garis kerja gaya yang sama
d. Tidak saling meniadakan
e. Bekerja pada benda yang berbeda
4. Gerak Translasi
Gerak lurus adalah gerak suatu obyek yang lintasannya berupa
garis lurus. Dapat pula gerak ini disebut sebagai suatu translasi beraturan .
a. Gerak Lurus Beraturan (GLB)
Gerak lurus suatu obyek, dimana dalam gerak ini kecepatannya
tetap atau tanpa percepatan. Sehingga jaraak yang ditempuh dalam
gerak lurus beraturan adalah kelajuan kali waktu.
s = v.t
keterangan: s = jarak tempuh (m)
v = kecepatan (m/s)
t = waktu (s)
b. Gerak Lurus Berubah Beraturan (GLBB)
Gerak lurus suatu obyek, di mana kecepatannya berubah terhadap
waktu akibat adanya percepatan yang tetap. Akibat adanya percepatan
rumus jarak yang ditempuh tidak lagi linear melainkan kuadratik.
Dengan kata lain benda yang melakukan gerak dari keadaan diam atau
mulai dengan kecepatan awal akan berubah kecepatannya karena ada
percepatan (a = +) atau perlambatan (a = -). Pada umumnya GLBB
didasari oleh Hukum II Newton (F=m . a).
v t=vo+at
v t2=v0
2+2as
s=vo t+ 12
at 2
Keterangan: vo= kecepatan awal (m/s)
v t = kecepatan akhir (m/s)
a=¿percepatan (m/s2)
t= waktu (s)
s = jarak yang ditempuh (m)
5. Gerak Rotasi
Gerak melingkar atau gerak rotasi merupakan gerak melingkar
suatu benda pada porosnya pada suatu lintasan melingkar. Bila sebuah
benda mengalami gerak rotasi melalui porosnya, ternyata pada gerak ini
akan berlaku persamaan gerak yang ekivalen dengan persamaan gerak
linear.
Momen inersia merupakan representasi dari tingkat kelembaman
benda yang bergerak rotasi. Momen Inersia pada gerak rotasi bisa
dianalogikan dengan massa pada gerak gerak translasi. Sedangkan gaya
pada gerak translasi dapat dianalogikan dengan momen gaya pada gerak
translasi. Jika gaya ini menyebabkan timbulnya percepatan pada gerak
translasi maka momen gaya itulah yang menyebabkan timbulnya
percepatan sudut pada gerak rotasi.
τ=Iα
Keterangan : τ=¿ momen gaya (Nm)
I = momen inersia (kg.m2)
α = percepatan sudut (rad/s2) [2]
Alat dan Bahan
1. Pesawat Atwood yang terdiri dari :
a. Tiang berskala R yang pada ujung atasnya terdapat katrol p.
b. Tali penggantung yang massanya dapat diabaikan.
c. Dua beban M1 dan M2 yang berbentuk silinder dengan massa sama
masing-masing M yang diikatkan pada ujung-ujung tali penggantung.
d. Dua beban tambahan dengan massa masing-masing m
e. Genggaman G dengan pegas, penahan beban B, penahan beban A yang
berlubang.
2. Neraca 310 gram
3. Sensor waktu
4. Jangka Sorong
5. Mistar
Identifikasi Variabel
Kegiatan 1
1. Variable manipulasi : jarak
2. Variabel control : kecepatan
3. Variabel respon : waktu
Kegiatan 2
1. Variabel manipulasi : jarak
2. Variabel control : kecepatan
3. Variabel respon : waktu
Definisi Operasional Variabel
Kegiatan 1
1. Variabel manipulasi merupakan variabel yang diubah-ubah pada saat
kegiatan pratikum. Pada kegiatan pertama, variabel yang diubah adalah
jarak dengan cara memindah-mindahkan posisi A sebanyak 10 kali.
2. Variabel kontrol merupakan variabel yang turut mempengaruhi
variabel respon, tapi pengaruhnya dihilangkan dengan cara dikontrol.
Pada kegiatan pertama variabel yang dikontrol adalah kecepatan,
karena selama kegiatan ini, beban M1 yang dilepas dari genggaman
dengan pegas, maka akan bergerak ke atas sedangkan beban M2 + m
akan bergerak ke bawah yang menyebabkan benda tersebut mengalami
kecepatan
3. Variabel respon merupakan variabel yang ikut berubah karena
diubahnya variabel manipulasi. Pada kegiatan pertama, yang termasuk
variabel respon adalah waktu yang ditujukkan oleh sensor waktu.
Kegiatan 2
1. Variable manipulasi merupakan variabel yang diubah-ubah pada saat
kegiatan pratikum. Pada kegiatan kedua, variable yang diubah adalah
jarak yakni dengan cara menentukan posisi C dan A dan mengatur
posisi B pada jarak tertentu dimana B dipindahkan sebanyak 8 kali.
2. Variabel kontrol merupakan variabel yang turut mempengaruhi
variabel respon, tapi pengaruhnya dihilangkan dengan cara dikontrol.
Pada kegiatan kedua, variabel yang dikontrol adalah kecepatan, karena
selama kegiatan ini, beban M1 yang dilepas dari genggaman dengan
pegas, maka akan bergerak ke atas sedangkan beban M2 + m akan
bergerak ke bawah yang menyebabkan benda tersebut mengalami
kecepatan
3. Variabel respon merupakan variabel yang ikut berubah karena
diubahnya variabel manipulasi. Pada kegiatan kedua, yang termasuk
variabel respon adalah waktu yang ditujukkan oleh sensor waktu.
Prosedur Kerja
Semua beban M1, M2, m, dan m katrol ditimbang dengan neraca 311 gram.
Memasang genggaman G, penahan beban tambahan A dan penahan beban B pada
tiang berskala. Untuk menyelidiki apakan pesawat atwood bekerja dengan baik,
melakukan percobaan sebagai berikut :
1. Menggantung M1 dan M2 pada ujung-ujung tali kemudian dipasang pada
katrol.
2. Memasang M1 pada genggaman G, dengan menggunakan pegas,
menyelidiki apakah tiang berskala sejajar dengan tali. Jika tidak mengatir
sampai sejajar.
3. Menambahkan beban tambahan m1 pada M2
4. Menekan G, makan M1 akan terlepas dari genggaman G, dan bergerak ke
atas, sedang M2 + m1 akan bergerak ke bawah. Jika pesawat bekerja
dengan baik maka kedua beban akan bergerak dipercepat, dan ketika M2 +
m1 melalui A, m1 akan tersangkut di a, dan system akan bergerak lurus
beraturan. Jika hal ini tidak terjadi membetulkan letak penahan beban
tambahan A.
5. Selanjutnya, memasang lagi beban M1 pada genggaman dan M2 ditambah
salah satu beban tambahan.
Kegiatan 1
Gerak dari C ke A
1. Mencatat kedudukan C dan A. Melepas M1 dan mencatat waktu yang
diperlukan oleh benda bergerak dari titik C ke A. Melakukan 3 kali
pengukuran berulang dengan jarak yang sama.
2. Mengulangi langkah a dengan memindah-mindahkan posisi A minimal
10 kali. Mencatat hasilnya dalam tabel hasil pengamatan.
Kegiatan 2
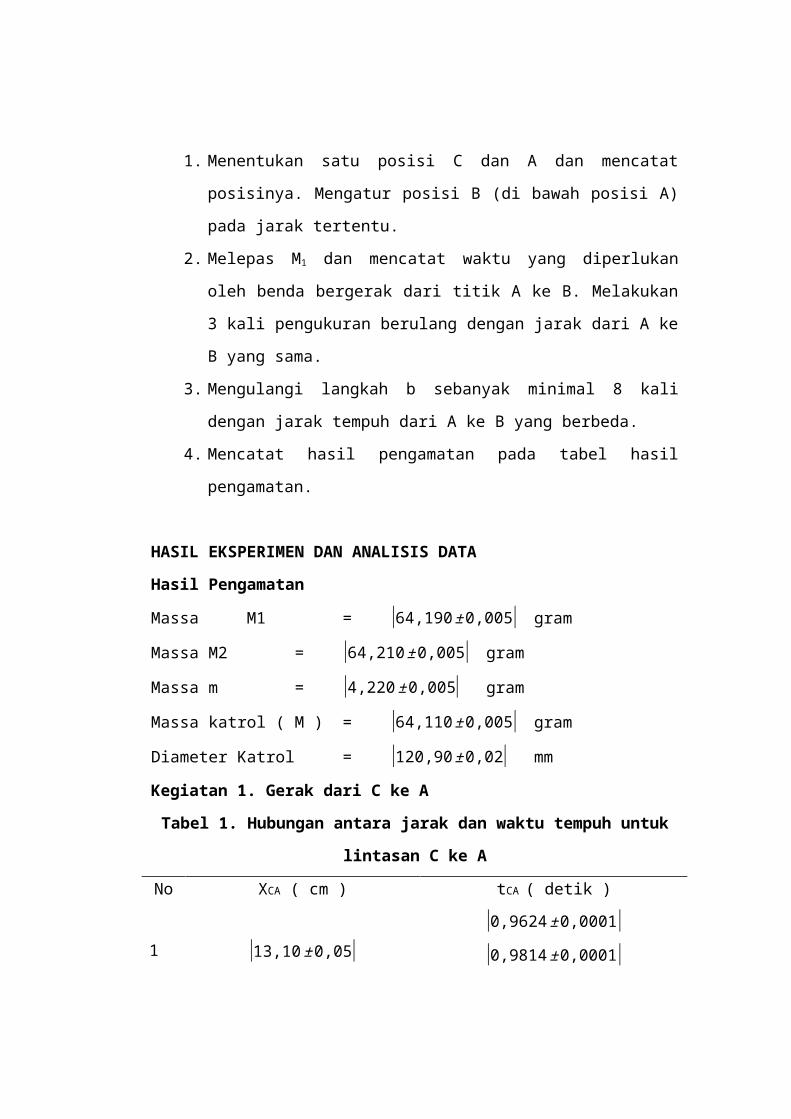
1. Menentukan satu posisi C dan A dan mencatat posisinya. Mengatur
posisi B (di bawah posisi A) pada jarak tertentu.
2. Melepas M1 dan mencatat waktu yang diperlukan oleh benda bergerak
dari titik A ke B. Melakukan 3 kali pengukuran berulang dengan jarak
dari A ke B yang sama.
3. Mengulangi langkah b sebanyak minimal 8 kali dengan jarak tempuh dari
A ke B yang berbeda.
4. Mencatat hasil pengamatan pada tabel hasil pengamatan.
HASIL EKSPERIMEN DAN ANALISIS DATA
Hasil Pengamatan
Massa M1 = |64,190± 0,005| gram
Massa M2 = |64,210± 0,005| gram
Massa m = |4,220± 0,005|gram
Massa katrol ( M ) = |64,110± 0,005| gram
Diameter Katrol = |120,90 ± 0,02|mm
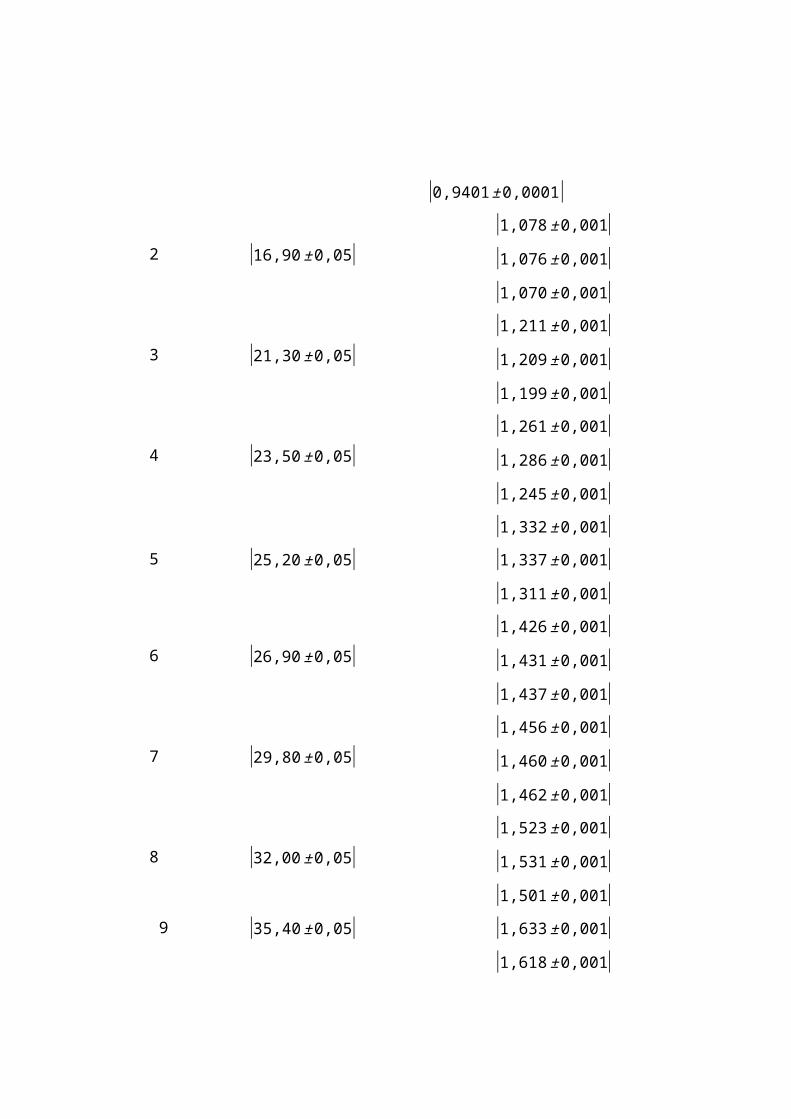
Kegiatan 1. Gerak dari C ke A
Tabel 1. Hubungan antara jarak dan waktu tempuh untuk lintasan C ke A
No XCA ( cm ) tCA ( detik )
1 |13,10 ± 0,05|
|0,9624 ± 0,0001|
|0,9814 ± 0,0001|
|0,9401 ± 0,0001|
2 |16,90 ± 0,05|
|1,078 ± 0,001|
|1,076 ± 0,001|
|1,070 ± 0,001|
3 |21,30 ± 0,05|
|1,211± 0,001|
|1,209 ± 0,001|
|1,199 ± 0,001|
4 |23,50 ± 0,05|
|1,261 ± 0,001|
|1,286 ± 0,001|
|1,245 ± 0,001|
|1,332 ± 0,001|
5 |25,20 ± 0,05| |1,337 ± 0,001|
|1,311± 0,001|
6 |26,90 ± 0,05|
|1,426 ± 0,001|
|1,431 ± 0,001|
|1,437 ± 0,001|
7 |29,80 ± 0,05|
|1,456 ± 0,001|
|1,460 ± 0,001|
|1,462 ± 0,001|
8 |32,00 ± 0,05|
|1,523 ± 0,001|
|1,531 ± 0,001|
|1,501 ± 0,001|
9 |35,40 ± 0,05|
|1,633 ± 0,001|
|1,618 ± 0,001|
|1,656 ± 0,001|
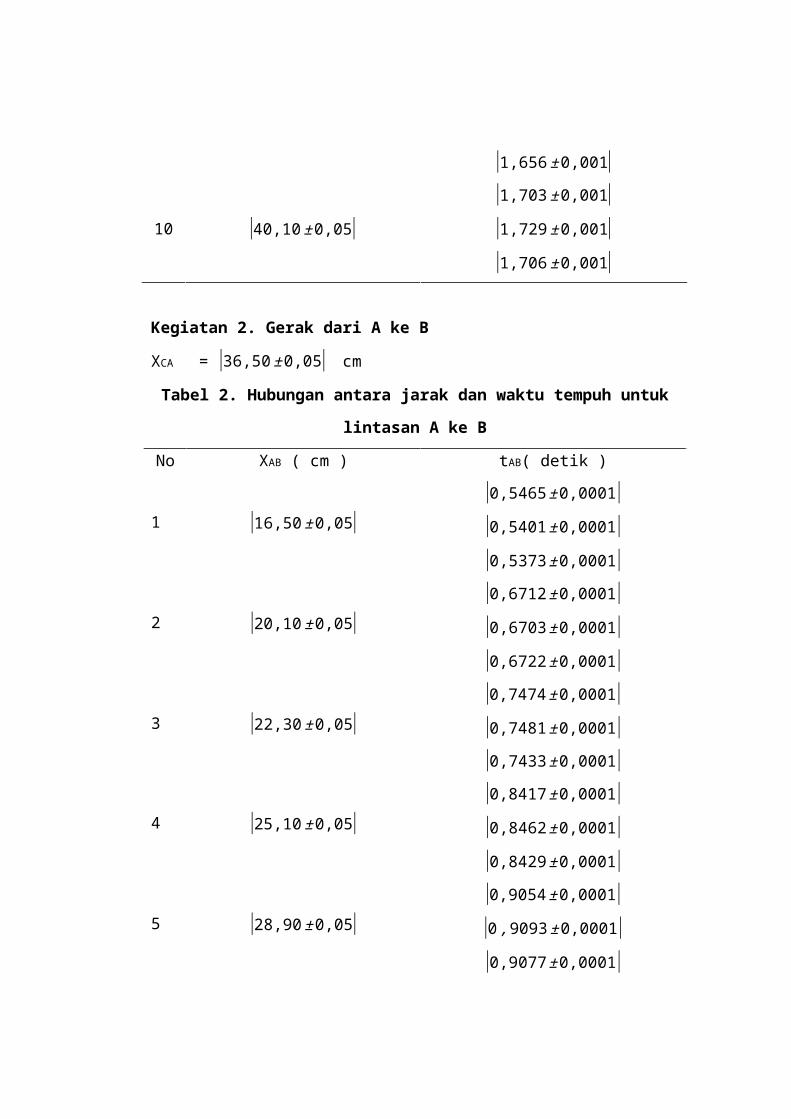
10 |40,10± 0,05|
|1,703 ± 0,001|
|1,729 ± 0,001|
|1,706 ± 0,001|
Kegiatan 2. Gerak dari A ke B
XCA = |36,50 ± 0,05| cm
Tabel 2. Hubungan antara jarak dan waktu tempuh untuk lintasan A ke B
No XAB ( cm ) tAB( detik )
1 |16,50 ± 0,05|
|0,5465 ± 0,0001|
|0,5401 ± 0,0001|
|0,5373 ± 0,0001|
2 |20,10 ± 0,05|
|0,6712 ± 0,0001|
|0,6703 ± 0,0001|
|0,6722 ± 0,0001|
3 |22,30 ± 0,05|
|0,7474 ± 0,0001|
|0,7481 ± 0,0001|
|0,7433 ± 0,0001|
4 |25,10 ± 0,05|
|0,8417 ± 0,0001|
|0,8462 ± 0,0001|
|0,8429 ± 0,0001|
5 |28,90 ± 0,05|
|0,9054 ± 0,0001|
|0 ,9093 ± 0,0001|
|0,9077 ± 0,0001|
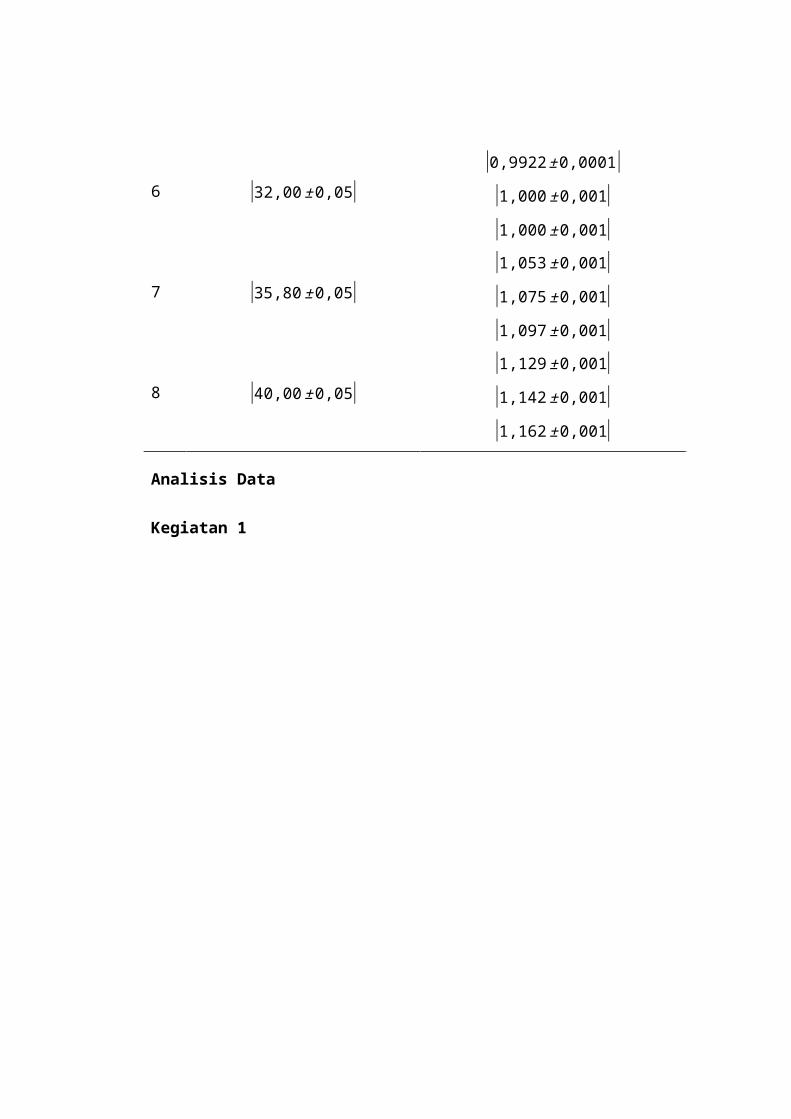
6 |32,00 ± 0,05|
|0,9922 ± 0,0001|
|1,000 ± 0,001|
|1,000 ± 0,001|
7 |35,80 ± 0,05|
|1,053 ± 0,001|
|1,075 ± 0,001|
|1,097 ± 0,001|
8 |40,00± 0,05|
|1,129 ± 0,001|
|1,142 ± 0,001|
|1,162 ± 0,001|
Analisis Data
Kegiatan 1
0.5000 1.0000 1.5000 2.0000 2.5000 3.0000 3.50000.0000
0.1000
0.2000
0.3000
0.4000
0.5000
0.6000
0.7000
0.8000
0.9000
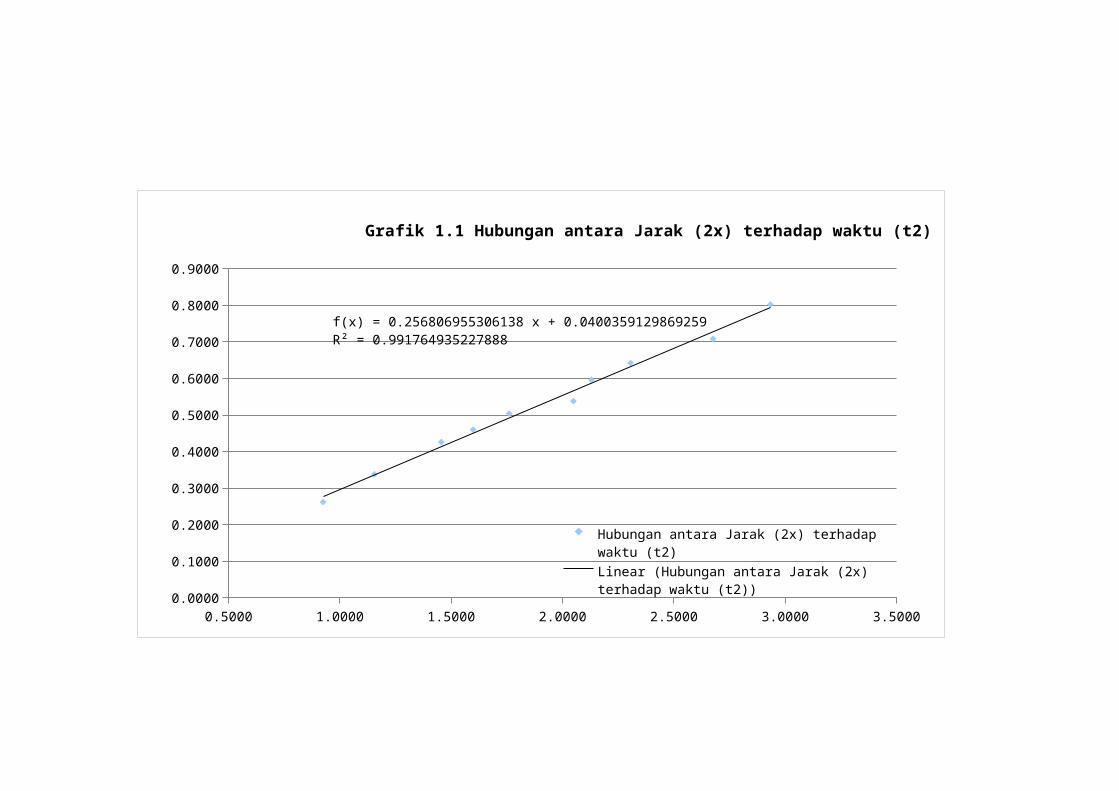
f(x) = 0.256806955306138 x + 0.0400359129869259R² = 0.991764935227888
Grafik 1.1 Hubungan antara Jarak (2x) terhadap waktu (t2)
Hubungan antara Jarak (2x) terhadap waktu (t2)
Linear (Hubungan antara Jarak (2x) terhadap waktu (t2))
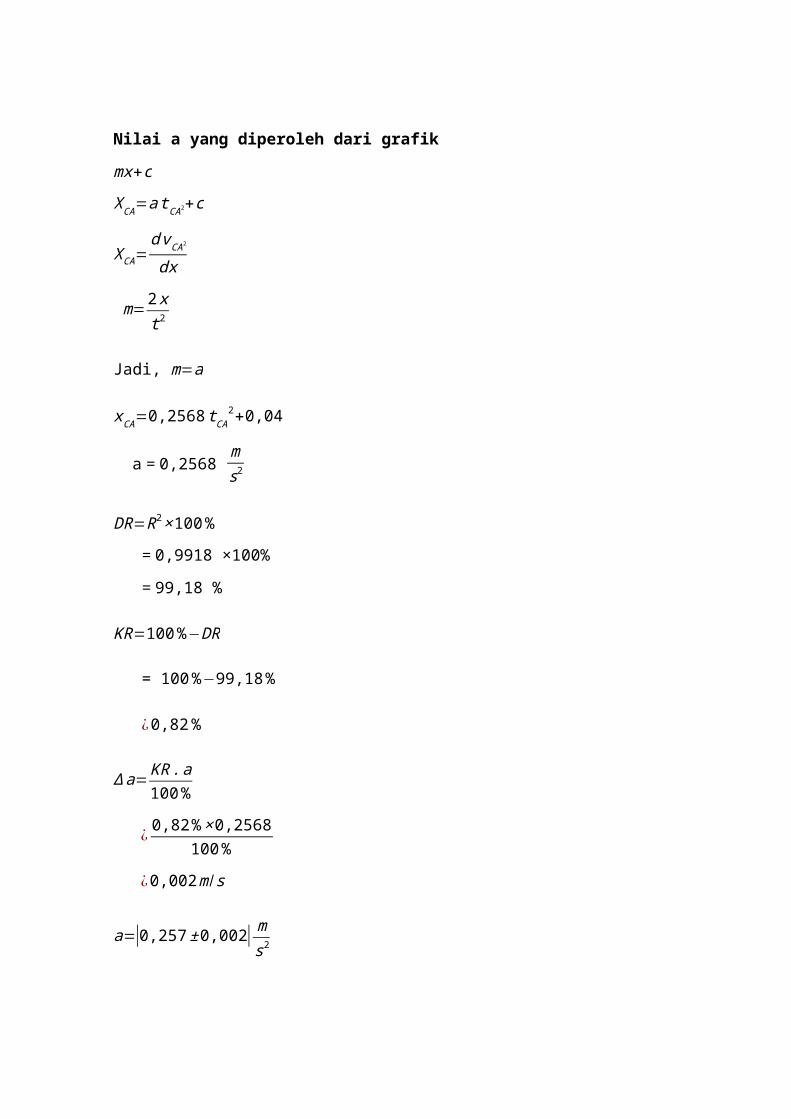
Nilai a yang diperoleh dari grafik
mx+c
XCA=a tCA2+c
XCA=d vCA2
dx
m=2xt 2
Jadi, m=a
xCA=0,2568 tCA2+0,04
a = 0,2568 ms2
DR=R2 ×100 %
= 0,9918 ×100%
= 99,18 %
KR=100 %−DR
= 100 %−99,18 %
¿0,82 %
∆ a= KR.a100 %
¿ 0,82 %×0,2568100 %
¿0,002 m /s
a=|0,257 ± 0,002|ms2
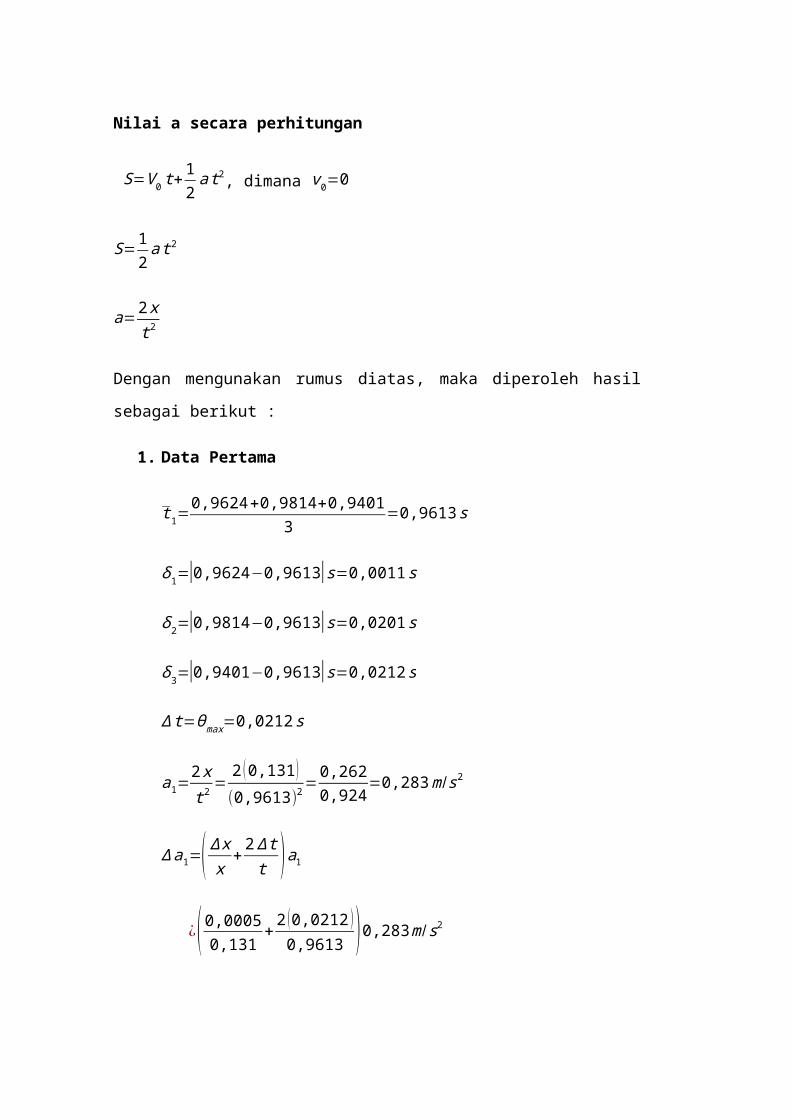
Nilai a secara perhitungan
S=V 0 t +12
a t 2, dimana v0=0
S=12
a t2
a=2 xt2
Dengan mengunakan rumus diatas, maka diperoleh hasil sebagai berikut :
1. Data Pertama
t 1=0,9624+0,9814+0,9401
3=0,9613 s
δ 1=|0,9624−0,9613|s=0,0011s
δ 2=|0,9814−0,9613|s=0,0201 s
δ 3=|0,9401−0,9613|s=0,0212 s
∆ t=ϑ max=0,0212 s
a1=2 xt 2 = 2 (0,131 )
(0,9613)2=0,2620,924
=0,283 m /s2
∆ a1=( ∆ xx
+2 ∆tt )a1
¿( 0,00050,131
+2 (0,0212 )
0,9613 )0,283 m /s2
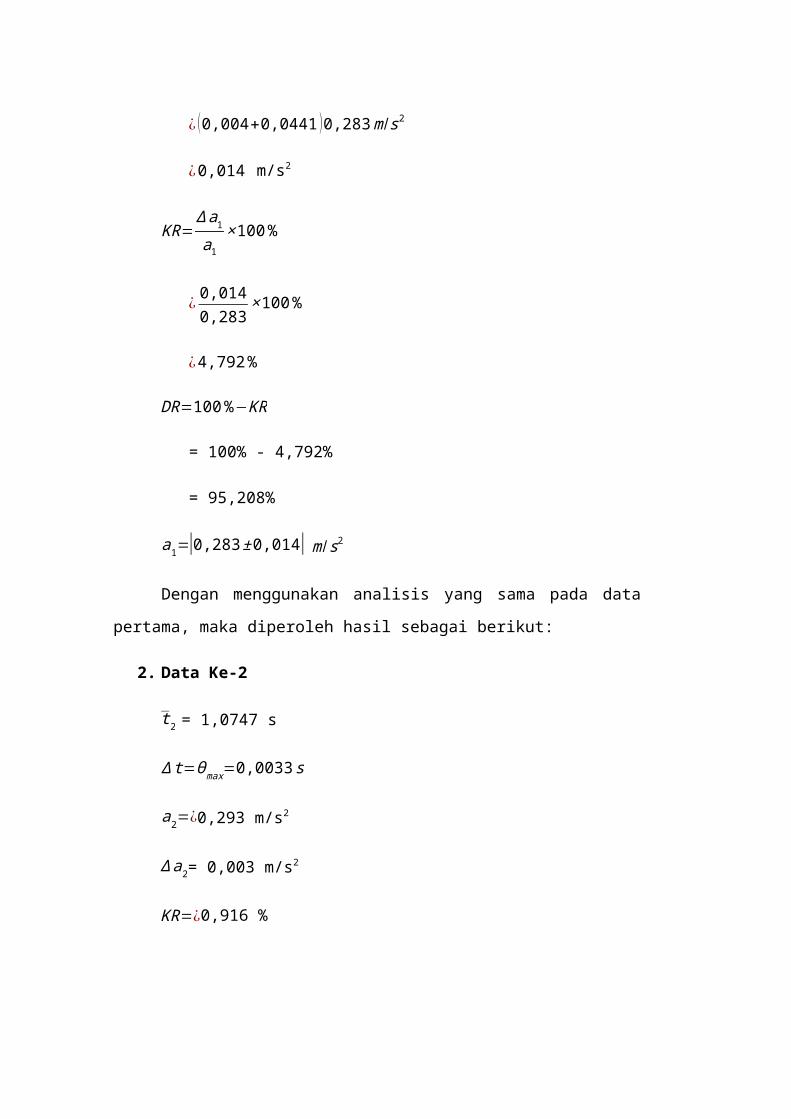
¿ (0,004+0,0441 )0,283 m / s2
¿0,014 m/s2
KR=∆ a1
a1×100 %
¿ 0,0140,283
× 100 %
¿4,792 %
DR=100 %−KR
= 100% - 4,792%
= 95,208%
a1=|0,283 ± 0,014| m /s2
Dengan menggunakan analisis yang sama pada data pertama, maka
diperoleh hasil sebagai berikut:
2. Data Ke-2
t 2 = 1,0747 s
∆ t=ϑ max=0,0033 s
a2=¿0,293 m/s2
∆ a2= 0,003 m/s2
KR=¿0,916 %
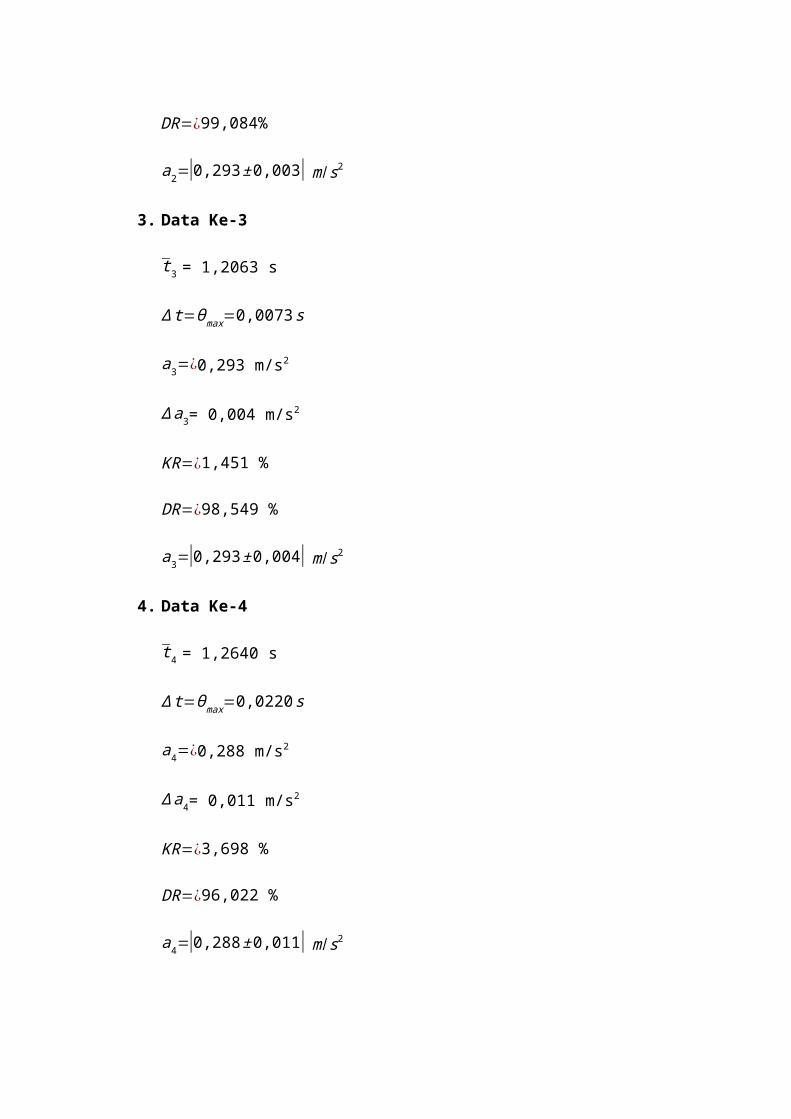
DR=¿99,084%
a2=|0,293 ± 0,003| m /s2
3. Data Ke-3
t 3 = 1,2063 s
∆ t=ϑ max=0,0073 s
a3=¿0,293 m/s2
∆ a3= 0,004 m/s2
KR=¿1,451 %
DR=¿98,549 %
a3=|0,293 ± 0,004| m /s2
4. Data Ke-4
t 4 = 1,2640 s
∆ t=ϑ max=0,0220 s
a4=¿0,288 m/s2
∆ a4= 0,011 m/s2
KR=¿3,698 %
DR=¿96,022 %
a4=|0,288 ±0,011| m /s2
5. Data Ke-5
t 5 = 1,3267 s
∆ t=ϑ max=0,0157 s
a5=¿0,286 m/s2
∆ a5= 0,007 m/s2
KR=¿2,56 %
DR=¿97,44%
a5=|0,286 ± 0,007| m /s2
6. Data Ke-6
t 6 = 1,4313 s
∆ t=ϑ max=0,0057 s
a6=¿0,263 m/s2
∆ a6= 0,003 m/s2
KR=¿0,978 %
DR=¿99,022%
a6=|0,263 ± 0,003| m /s2
7. Data Ke-7
t 7 = 1,4593 s
∆ t=ϑ max=0,0033 s
a7=¿0,28 m/s2
∆ a7= 0,002 m/s2
KR=¿0,625 %
DR=¿99,375%
a7=|0,280 ± 0,002| m /s2
8. Data Ke-8
t 8 = 1,5183 s
∆ t=ϑ max=0,0173 s
a8=¿0,278 m/s2
∆ a8= 0,007 m/s2
KR=¿2,439 %
DR=¿97,561%
a8=|0,278 ± 0,007| m /s2
9. Data Ke-9
t 9 = 1,6357 s
∆ t=ϑ max=0,0203 s
a9=¿0,265 m/s2
∆ a9= 0,007 m/s2
KR=¿2,627 %
DR=¿97,373%
a9=|0,265 ± 0,007| m /s2
10. Data Ke-10
t 10 = 1,7127 s
∆ t=ϑ max=0,0163 s
a10=¿0,273 m/s2
∆ a10= 0,006 m/s2
KR=¿2,627 %
DR=¿97,968 %
a10=|0,293 ± 0,003| m /s2
Dari data tersebut maka rata-rata percepatannya yakni:
a=0,283+0,293+0,293+0,288+0,286+0,263+0,280+0,278+¿0,265+0,27310
a=0,28m/s2
∆ a=∆ a1
a1+
∆ a2
a2+
∆ a3
a3+
∆ a4
a4+
∆ a5
a5+
∆ a6
a6+
∆ a7
a7+
∆ a8
a8+
∆ a9
a9+
∆ a10
a10
∆ a=0,0140,283
+ 0,0030,293
+ 0,0040,293
+ 0,0110,288
+0,0070,286
+ 0,0030,263
+ 0,0020,280
+ 0,0070,278
+ 0,0070,265
+ 0,0060,273
∆ a=(0,0479 )+ (0,0092 )+ (0,0145 )+(0,0370 )+ (0.0256 )+ (0,0098 )+ (0,0062 )+ (0,0244 )+(0,0263 )+ (0,0203 )
∆ a=0,2212×10−2m/s2
¿0,002m/s2
KR=∆ aa
100 %
¿ 0,0020,28
100 %
¿0,79 %
DR=100 %−KR
= 100% - 0,79%
= 99,21%
a=|0,280 ± 0,002|m /s2
Nilai a berdasarkan persamaan 3.4
a =
(m+M 1 )−M 2
m+M 1+ M2+ I /R2⋅g
a = ( 4,22×10−3+64,19 ×10−3 )−64,21× 10−3
4,22×10−3+64,19 ×10−3+64,21× 10−3+11,1710−2/3,659.8
a = 0,00420,165 9,8
a = 0,0255 × 9,8
a = 0,25 m /s2
a =
(m+M 1 )−M 2
m+M 1+ M2+ I /R2⋅g
a=¿(m+M1) – M2 . (m+M1+M2+I/R2)-1 . g
da = | ∂ a∂((m .M 1 )−M 2)|dm+
| ∂a∂(m−1 . M 1−1+M 2−1)|dm+| ∂ a
∂ I−1|dI+ | ∂ a∂ R2|dR2
da = |∂((m . M 1 )−M 2)(m−1 . M 1−1+M 2−1+ I−1+R2)∂ (m . M 1 )−M 2 |dm+
|∂((m . M 1 )−M 2)(m−1 . M 1−1+M 2−1+ I−1+R2)∂(m−1 .M 1−1+M 2−1) |dm+
|∂((m . M 1 )−M 2)(m−1 . M 1−1+M 2−1+ I−1+R2)∂ I−1 |dI+
|∂((m . M 1 )−M 2)m−1 . M 1−1+ M 2−1+ I−1+R2
∂R2 |dR2
daa = |m−1. M 1−1+M 2−1+ I−1+R2. dm
a | +
|(m .M 1 )−M 2¿ I−1+R2 . dm¿¿a|+|( (m . M 1 )−M 2 ) ( m−1. M 1−1+M 2−1 )+R2 ¿ . dI¿¿ a|
+ |( (m . M 1 )−M 2 ) ( m−1 . M 1−1+M 2−1 ) I d R2
a |daa = | m−1 . M 1−1+M 2−1+ I−1+ R2 . dm
( (m . M 1 )−M 2 ) m−1 . M 1−1+M 2−1+ I−1+R2|+
| m−1 . M 1−1+M 2−1+ I−1+ R2 . dm( (m .M 1 )−M 2 ) m−1 .M 1−1+M 2−1+ I−1+R2|+|( (m .M 1 )−M 2 ) ( m−1. M 1−1+M 2−1 )+R2 ¿ . dI¿¿ ((m. M 1 )−M 2)m−1. M 1−1+M 2−1+ I−1+R2 ¿¿|
+ | ( ( m. M 1 )−M 2 ) (m−1. M 1−1+M 2−1 ) d R2
(( m. M 1 )−M 2)m−1 . M 1−1+M 2−1+ I−1+R2 ¿¿|
daa = | dm
(m. M 1 )−M 2| + | dmm−1 . M 1−1+M 2−1|+| dI
I−1| + |dR2
R2 |∆ aa = | ∆ m
(m. M 1 )−M 2| + | ∆ mm−1. M 1−1+M 2−1|+|∆ I
I−1| + |∆ R2
R2 |∆ a = | ∆ m
(m. M 1 )−M 2| + | ∆ mm−1. M 1−1+M 2−1|+|∆ I
I−1| + |∆ R2
R2 |a
∆ a = | 0,005(0.042.0,641 )−0,642|+ | 0,005
0,004.0,064+0,064|+|0,0010,170| +
|0,020,62
2|0,25 m /s2
∆ a = (−0,008 )+ (0,377 )+(0,005 )+(0,001 ) 0,25 m /s2
∆ a = 0,01 m /s2
KR=∆ aa
100 %
¿ 0,010,25
100 %
¿0,04 %
DR=100 %−KR
= 100% - 0,04%
= 99,96%
a=|0,25 ± 0,01|kg . m2
Momen Inersia Katrol berdasarkan persamaan 3.4
a =
(m+M 1 )−M 2
m+M 1+ M2+ I /R2⋅g
I ¿[ (m+M 1 ) g ]−[ ( M 1+M 2+m ) R2]
a
I =
[ (4,22 ×10−3+64,19× 10−3 ) 9,8 ]−[64,19 ×10−3+64,21 ×10−3+4,22 ×10−3 ) 3,654 × 10−5
25,68× 10−2
I = 0,04116−1,50407 ×10−6
0,2568
I = 0,16 kg.m2
I ¿[ (m+M 1 ) g ]−[ ( M 1+M 2+m ) R2]
a
I ¿ [ (m+M 1 ) g ]−[ ( M 1+ M 2+m ) R2 ] a−1
dI = | ∂ I∂ m+ M 1|dm+| ∂ I
∂ M 1+M 2+m|dm+| ∂ I∂ R2|dR2+ | ∂ I
∂ a−1|da-1
dI = |∂ [ (m+M 1 ) ]−[ ( M 1+ M 2+m ) R2 ] a−1
∂ m+M 1 |dm+
|∂ [ (m+M 1 ) ]−[ ( M 1+ M 2+m ) R2 ] a−1
M 1+M 2+m |dm+
|∂ [ (m+M 1 ) ]−[ ( M 1+ M 2+m ) R2 ] a−1
∂ R2 |dR2+
|∂ [ (m+M 1 ) ]−[ ( M 1+ M 2+m ) R2 ] a−1
∂ a−1 | da-1
d II = |[ ( M 1+M 2+m ) R2 ] a−1 . dm
I | +
|[ (m+M 1 ) R2 ] a−1 . dmI |+|[ (m+ M 1 ) ]−[ ( M 1+ M 2+m ) ] a−1 d R2
I | +
|[ (m+ M 1 ) ]−[ (M 1+M 2+m ) R2 ] d a−1
I |
d II =
| [ ( M 1+M 2+m ) R2 ]a−1. dm
[ (m+ M 1 ) ]−[ (M 1+M 2+m ) R2 ] a−1|+| [ (m+M 1 ) R2 ] a−1 . dm
[ (m+M 1 ) ]−[ ( M 1+M 2+m ) R2 ]a−1|+| [ (m+M 1 ) ]−[ ( M 1+M 2+m ) ]a−1d R2
[ (m+M 1 ) ]−[ ( M 1+M 2+m ) R2 ]a−1 |
+ | [ (m+ M 1 ) ]−[ (M 1+M 2+m ) R2 ] d a−1
[ (m+M 1 ) ]−[ ( M 1+M 2+m ) R2 ] a−1 |d II = | dm
m+ M 1| + | dmM 1+M 2+m|+|d R2
R2 | + |d a−1
a−1 |∆ II = | ∆ m
m+ M 1| + | ∆ mM 1+M 2+m|+|∆ R2
R2 | + |∆ a−1
a−1 |∆ I = | ∆ m
m+ M 1| + | ∆ mM 1+M 2+m|+|∆ R2
R2 | + |∆ a−1
a−1 | I
∆ I = | 0,0050,042+0,641|+ | 0,005
0,641+0,042+0,042|+ |0,020,62
2|+|0,0010,025|0,16 kg .m 2
∆ I = (0,007 )+ (0,003 )+ (0,001 )+(0,004 )0,16 kg .m 2
∆ I = 0,002 kg . m2
KR=∆ II
100 %
¿ 0,0020,16
100 %
¿0,02 %
DR=100 %−KR
= 100% - 0,02%
= 99,98%
I=|0,160 ± 0,002|kg . m2
Momen Inersia Katrol berdasarkan persamaan 3.3
I=12
M Katrol R2
I=12
0,06419 kg (0,6045 m )2
¿ 12
0,06419 kg (3,6542 ) m2
¿0,17 kg .m2
∆ I 1=(∆ MM
+ 2 ∆ RR )I
∆ I 1=( 0,005× 10−3
64,19 × 10−3 kg+2(0,02)×10−3
6,04 ×10−3 m)0,17 kg . m2
∆ I 1=(0,0001+0,007 )0,17 kg .m2
¿0,001 kg . m2
KR=∆ I 1
I 1100 %
¿ 0,0010.17
100 %
¿0,005 %
DR=100 %−KR
= 100%-0,005%
= 99,995%
I = |0,170 ± 0,001|kg .m2

0.5000 0.6000 0.7000 0.8000 0.9000 1.0000 1.1000 1.20000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
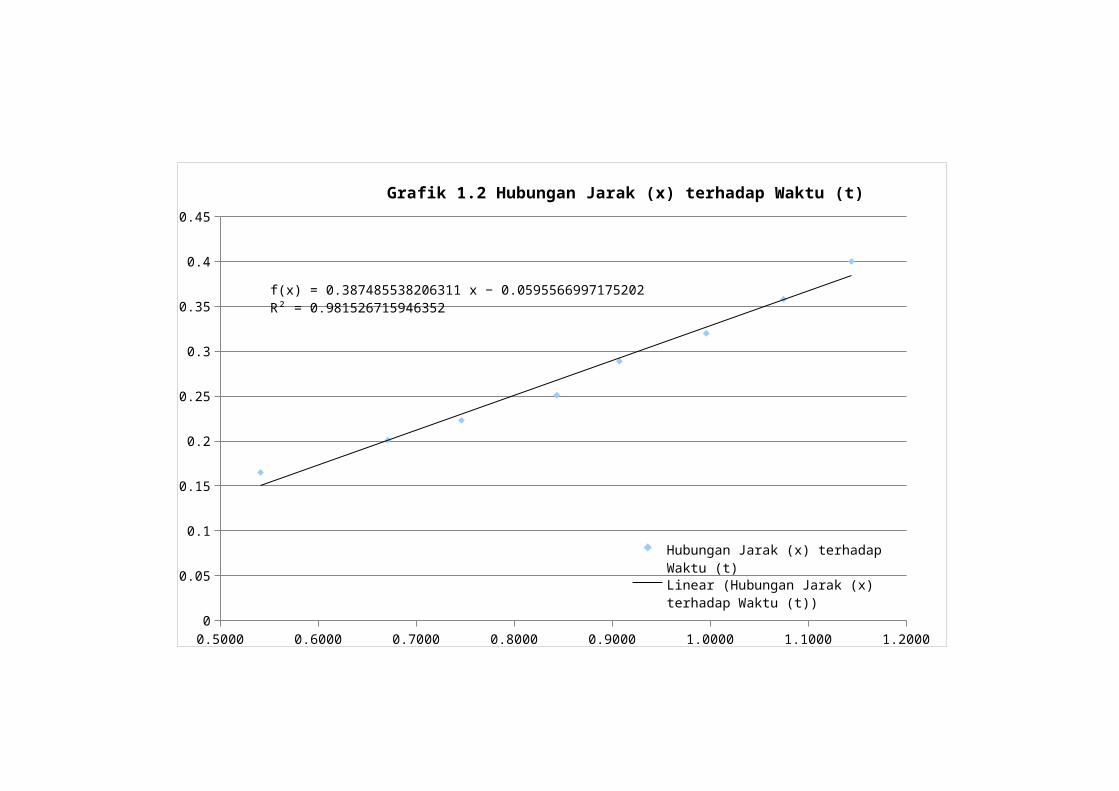
f(x) = 0.387485538206311 x − 0.0595566997175202R² = 0.981526715946352
Grafik 1.2 Hubungan Jarak (x) terhadap Waktu (t)
Hubungan Jarak (x) terhadap Waktu (t)
Linear (Hubungan Jarak (x) terhadap Waktu (t))

Nilai V dari Grafik
mx+c
X AB=a t AB+c
m= xt
m = v
v=0,3875 m /s
DK=R2 ×100 %
¿0,906 ×100 %
¿90,63 %
KR=100 %−DK
¿100 %−90,63 %
¿9,37 %
∆ v= KR. v100 %
¿ 9,37 %× 0,3875100 %
¿0,03 m /s
v=|0,38 ± 0,03|m /s
Nilai V dari persamaan GLBB
V = V0+at dimana V0=0
V = a.t
agrafik 1.1 = 0,2568 m/s2
Dengan mengunakan rumus diatas, maka diperoleh hasil sebagai berikut :
1. Data Pertama
t 1=0,5465+0,5401+0,5373
3=0,5413 s
δ 1=|0,5465−0,5413|s=0,0052 s
δ 2=|0,5401−0,5413|s=0,0012 s
δ 3=|0,5373−0,5413|s=0,0040 s
∆ t=ϑ max=0,0052 s
v1=a . t
= 0,2568 m/s2 . 0,5413 s
= 0,305 m/s
∆ v1=( ∆ xx
+2 ∆ tt )v1
¿( 0,0050,165
+ 2 (0,0052 )0,5413 )0,305 m /s2
¿ (0,305+0,019 )0,305 m /s2
¿0,007 m/s2
KR=∆ v1
v1×100 %
¿ 0,3050,007
× 100 %
¿2,26 %
DR=100 %−KR
= 100% - 2,26 %
= 97,74 %

v1=|0,305 ± 0,007| m /s
Dengan menggunakan analisis yang sama pada data pertama, maka
diperoleh hasil sebagai berikut:
2. Data Ke-2
t 2 = 0,6712 s
∆ t=ϑ max=0,001 s
v2=¿0,299 m/s2
∆ v2= 0,005 m/s2
K R=¿1,60 %
DR=¿98,40 %
v2=|0,299 ± 0,005| m /s2
3. Data Ke-3
t 3 = 0,7463 s
∆ t=ϑ max=0,003 s
v3=¿0,299 m/s2
∆ v3= 0,006 m/s2
KR=¿1,95 %
DR=¿98,05 %
v3=|0,299 ± 0,006| m /s2
4. Data Ke-4
t 4 = 0,8436 s
∆ t=ϑ max=0,0026 s
v4=¿0,298 m/s2
∆ v4= 0,006 m/s2
KR=¿1,90 %
DR=¿98,10 %
v4=|0,298± 0,006| m /s2
5. Data Ke-5
t 5 = 0,9075 s
∆ t=ϑ max=0,0021 s
v5=¿0,318 m/s2
∆ v5= 0,005 m/s2
KR=¿1,60 %
DR=¿98,40 %
v5=|0,318 ± 0,005| m /s2
6. Data Ke-6
t 6 = 0,9961 s
∆ t=ϑ max=0,0039 s
v6=¿0,321 m/s2
∆ v= 0,006m/s2
KR=¿1,87 %
DR=¿98,13 %
v6=|0,321 ± 0,006| m /s2
7. Data Ke-7
t 7 = 1,075 s
∆ t=ϑ max=0,022 s
v7=¿0,333 m/s2
∆ v7= 0,015 m/s2
KR=¿4,55 %
DR=¿95,45 %
v7=|0,333 ± 0,015| m /s2
8. Data Ke-8
t 8 = 1,1443 s
∆ t=ϑ max=0,0173 s
v8=¿0,350 m/s2
∆ v8= 0,013 m/s2
KR=¿3,65 %
DR=¿96,35%
v8=|0,350 ± 0,013| m /s2
Dengan menggunakan data diatas maka diperoleh rata-rata v
v=0,305+0,299+0,299+0,298+0,318+0,321+0,333+0,3508
v=0,315m/s2
∆ v=∆ v1
v1+
∆ v2
v2+
∆ v3
v3+
∆ v4
v4+
∆ v5
v5+ ∆ v
v6+ ∆ v
v7+
∆ v8
v8
∆ v=0,0070,305
+ 0,0050,299
+ 0,0060,299
+ 0,0060,298
+ 0,0050,318
+ 0,0060,321
+ 0,0150,333
+ 0,0130,350
∆ v=(0,023 )+ (0,016 )+(0,019 )+(0,019 )+( 0.016 )+(0,019 )+(0,046 )+ (0,036 )
∆ v=0,194 × 10−2m/s2
¿0,002m/s2
KR=∆ vv
100 %
¿ 0,0020,315
100 %
¿0,006 %
DR=100 %−KR
= 100% - 0,006%
= 99,994%
v=|0,315 ± 0,002|m /s2
PEMBAHASAN
Pada kegiatan ini juga telah terbukti berlakunya hukum 1 newton yakni hal
ini dapat dilihat pada saat beban tambahan (m) tersangkut di penahan beban A
(kegiatan 2), maka beban keduanya tetap bergerak konstan sepanjang garis lurus.
Dengan kata lain benda akan bergerak lurus beraturan. Hal ini sesuai dengan
hukum 1 newton yang menyatakan bahwa jika suatu benda mula-mula diam maka
benda tersebut selamanya akan diam. Benda akan bergerak, ketika ada gaya yang
bekerja padanya. Begitupun sebaliknya benda yang bergerak selamanya akan
bergerak kecuali ada gaya yang menghentikannya. Hal ini mengungkapkan
tentang sifat benda yang cenderung mempertahankan keadaannya. Sifat ini sering
disebut kelembaban (inersia).
Pada kegiatan pertama, telah didapatkan nilai a dengan menggunakan 3
cara, yakni :
1. Dengan menggunakan grafik diperoleh
a=|0,257 ± 0,002|ms2
2. Dengan menggunakan perhitungan (rata-rata a¿
a=|0,280 ± 0,002|m /s2
3. Dengan menggunakan persamaan 3.4
a = |0,25 m /s2± 0,01∨¿ m/s2
Hasil yang diperoleh diantara ketiganya tidak jauh beda atau nilainya
mendekati (hasil yang didapat tidak persis, hal tersebut diakibatkan karena ketidak
telitian dalam pengukuran). Adapun nilai momen inersia menggunakan 2 cara
yakni :
1. Dengan menggunakan rumus I ¿[ (m+M 1 ) g ]−[ ( M 1+M 2+m ) R2]
a
I=|0,160 ± 0,002|kg . m2
1. Dengan menggunakan rumus I=12
M Katrol R2
I = |0,170 ± 0,001|kg .m2
Hasil yang diperoleh diantara keduanya tidak persis namun nilainya
mendekati, hal tersebut diakibat karena ketidak telitian dalam pengukuran.
Kemudian pada kegiatan 2, telah diperoleh nilai kecepatan dengan
menggunakan 2 cara yakni:

1. Dengan menggunkan grafik
v=|0,38 ± 0,03|m /s
2. Dengan menggunakan rumus GLBB
v=|0,315 ± 0,002|m /s2
SIMPULAN DAN DISKUSI
1. Pesawat atwood digunakan untuk membuktikan berlakunya hukum
Newton, pada lintasan C – A berlaku Hukum II Newton (GLBB
dipercepat), sedangkan pada lintasan A – B berlaku Hukum I
Newton (GLB).
2. Untuk menghitung momen kelembaman (inersia) katrol digunakan 2
rumus yakni :
a. I ¿[ (m+M 1 ) g ]−[ ( M 1+M 2+m ) R2]
a
b. I=12
M Katrol R2
DAFTAR RUJUKAN
[1] Herman dan Asisten LFD. 2014. Penuntun praktikum fisika dasar 1. Makassar
: UNM
[2] https://nurfauziawati.files.wordpress.com/2012/01/modul-2-pesawat-atwood1
(Diakses pada tanggal 25 November 2015, pada pukul 01:15 WITA)





























