Embed Size (px)
Citation preview

EENG 32131 MEASUREMENTS AND INSTRUMENTATION
FACULTY OF ENGINEERING AND COMPUTER TECHNOLOGY
BENG (HONS) IN ELECTRICAL AND ELECTRONIC ENGINEERING
Ravandran Muttiah BEng (Hons) MSc MIET

Thermistors are non-linear temperature dependent resistors with a high
resistance temperature coefficient. They are advanced ceramics where the
repeatable electrical characteristics of the molecular structure allow them
to be used as solid-state, resistive temperature sensors. This molecular
structure is obtained by mixing metal oxides together in varying
proportions to create a material with the proper resistivity.
Two types of Thermistors are available: Negative Temperature Coefficient
(NTC), resistance decreases with increasing temperature and Positive
Temperature Coefficient (PTC), resistance increases with increasing
temperature. In practice only NTC Thermistors are used for temperature
measurement. PTC Thermistors are primarily used for relative
temperature detection.
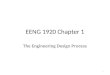
In this class we will use an NTC thermistor. The temperature versus
resistance data of our thermistor is shown on the table and figure below.
Thermoelectric Transducer
1

Figure 1
2

For convenience we would like derive a mathematical expression which
describes the behavior of the device. The Steinhart and Hart equation is an
empirical expression that has been determined to be the best mathematical
expression for resistance temperature relationship of NTC thermistors. The
most common form of this equation is:
1
𝑇= 𝑎 + 𝑏 ln𝑅 + 𝑐 ln 𝑅 3 (1)
Where T is in Kelvin and R in Ω. The coefficients a, b and c are constants
which in principle are determined by measuring the thermistor resistance at
three different temperatures T1, T2, and T3 and then solving the resulting three
equations for a, b, and c.
1
𝑇1= 𝑎 + 𝑏 ln𝑅1 + 𝑐 ln 𝑅1
3
1
𝑇2= 𝑎 + 𝑏 ln 𝑅2 + 𝑐 ln 𝑅2
3
1
𝑇3= 𝑎 + 𝑏 ln 𝑅3 + 𝑐 ln 𝑅3
3
3

The parameters a, b and c for the thermistors provided with the lab kit in the
temperature range between 0-50 degree Celcius are:
𝑎 = 1.1869 × 10−3
𝑏 = 2.2790 × 10−4
𝑐 = 8.7000 × 10−8
The Steinhart and Hart equation may be used in two ways.
(1) If resistance is known, the temperature may be determined from equation 1.
(2) If temperature is known the resistance is determined from the following equation:
𝑅 = 𝑒𝑥𝑝 𝛽 −𝛼
2
13− 𝛽 +
𝛼
2
13
where, α =𝑎−
1
𝑇
𝑐and β =
𝑏
3𝑐+
𝛼2
4
4

The non-linear resistance versus temperature behavior of the thermistor is
the main disadvantage of these devices. However, with the availability of
low cost microcontroller systems the non-linear behavior can be handled in
software by simply evaluating the Steinhart and Hart equation at the desired
point.
The sensitivity of the thermistor,𝑑𝑅
𝑑𝑇, varies with temperature. For our
thermistor the sensitivity as a function of temperature is shown on the
following figure.
Note that the thermistor sensitivity decreases with increasing temperature.
This is the primary reason for the small temperature measuring range of
thermistors. Notice however that in temperature range of interest to
biological and most environmental applications the sensitivity is greater
than 100Ω/degree Celsius which results in the design of sensitive and
robust systems.
5

6
Figure 2

Electronic Transducer
7
Figure 3

8
The Function Of Electronic Transducer
For a certain design when a toaster is engaged a magnetic material is placed in
contact with an electromagnet. The magnetic contact to the solenoid is made
of a material whose magnetism is a function of temperature. Indeed the
temperature at which the material loses its magnetisation (labeled the Curie
temperature Tc) is in the order to 100 degrees Celsius. When the temperature
is less than Tc the magnet maintains its magnetism, however when T > Tc, then
the magnetism is lost and the switch opens. Pushing down on the toaster
engages the switch. The control for browning the toast, simply moves the
magnetic switch closer or further away from the heating elements. Notice that
the AC plug has two grounds. The Earth ground is for user protection and
typically is connected to the chassis of the toaster. The AC return completes
the circuit and allows current to flow. The Earth and AC return should never
be connected together. In two prong AC plugs the Earth ground is missing.

9
Wheatstone Bridge
The Wheatstone Bridge was originally developed by Charles Wheatstone to
measure unknown resistance values and as a means of calibrating measuring
instruments, voltmeters, ammeters, etc, by the use of a long resistive slide wire.
Figure 4: Wheatstone Bridge

10
Although today digital multimeters provide the simplest way to measure a
resistance. The Wheatstone Bridge can still be used to measure very low values of
resistances down in the milli-Ohms range.
The Wheatstone bridge (or resistance bridge) circuit can be used in a number of
applications and today, with modern operational amplifiers we can use
the Wheatstone Bridge Circuit to interface various transducers and sensors to these
amplifier circuits.
The Wheatstone Bridge circuit is nothing more than two simple series-parallel
arrangements of resistances connected between a voltage supply terminal and
ground producing zero voltage difference between the two parallel branches when
balanced. A Wheatstone bridge circuit has two input terminals and two output
terminals consisting of four resistors configured in a diamond-like arrangement as
shown. This is typical of how the Wheatstone bridge is drawn.

11
When balanced, the Wheatstone bridge can be analysed simply as two series
strings in parallel. In our tutorial about resistors in series, we can see that
each resistor within the series chain produces an IR drop, or voltage drop
across itself as a consequence of the current flowing through it as defined by
Ohms Law. Consider the series circuit below.
As the two resistors are in series, the same current ( i ) flows through both of
them. Therefore the current flowing through these two resistors in series is
given as: V/RT.
I = V ÷ R = 12V ÷ (10Ω + 20Ω) = 0.4A
The voltage at point C, which is also the voltage drop across the lower
resistor, R2 is calculated as:
VR2 = I × R2 = 0.4A × 20Ω = 8 volts

12
Then we can see that the source voltage VS is divided among the two series
resistors in direct proportion to their resistances as VR1 = 4V and VR2 = 8V.
This is the principle of voltage division, producing what is commonly called a
potential divider circuit or voltage divider network.
Now if we add another series resistor circuit using the same resistor values in
parallel with the first we would have the following circuit.
As the second series circuit has the same resistive values of the first, the
voltage at point D, which is also the voltage drop across resistor, R4 will be the
same at 8 volts, with respect to zero (battery negative), as the voltage is
common and the two resistive networks are the same.

13
But something else equally as important is that the voltage difference between
point C and point D will be zero volts as both points are at the same value of 8
volts as: C = D = 8 volts, then the voltage difference is: 0 volts
When this happens, both sides of the parallel bridge network are said to
be balanced because the voltage at point C is the same value as the voltage at
point D with their difference being zero.
Now let’s consider what would happen if we reversed the position of the two
resistors, R3 and R4 in the second parallel branch with respect to R1 and R2.

14
With resistors, R3 and R4 reversed, the same current flows through the series
combination and the voltage at point D, which is also the voltage drop across
resistor, R4 will be:
VR4 = 0.4A × 10Ω = 4 volts
Now with VR4 having 4 volts dropped across it, the voltage difference between
points C and D will be 4 volts as: C = 8 volts and D = 4 volts. Then the
difference this time is: 8 – 4 = 4 volts
The result of swapping the two resistors is that both sides or “arms” of the
parallel network are different as they produce different voltage drops. When this
happens the parallel network is said to be unbalanced as the voltage at
point C is at a different value to the voltage at point D.
Then we can see that the resistance ratio of these two parallel
arms, ACB and ADB, results in a voltage difference between 0 volts (balanced)
and the maximum supply voltage (unbalanced), and this is the basic principal of
the Wheatstone Bridge Circuit.

15
So we can see that a Wheatstone bridge circuit can be used to compare an
unknown resistance RX with others of a known value, for example, R1 and R2,
have fixed values, and R3 could be variable. If we connected a voltmeter,
ammeter or classically a galvanometer between points C and D, and then
varied resistor, R3 until the meters read zero, would result in the two arms
being balanced and the value of RX, (substituting R4) known as shown.
Figure 5: Wheatstone Bridge Circuit

16
By replacing R4 above with a resistance of known or unknown value in the
sensing arm of the Wheatstone bridge corresponding to RX and adjusting the
opposing resistor, R3 to “balance” the bridge network, will result in a zero
voltage output. Then we can see that balance occurs when:
The Wheatstone Bridge equation required to give the value of the unknown
resistance, RX at balance is given as:

17
Where resistors, R1 and R2 are known or preset values.
Example 1:
The following unbalanced Wheatstone Bridge is constructed. Calculate the
output voltage across points C and D and the value of resistor R4 required to
balance the bridge circuit.
Figure 6

18
For the first series arm, ACB
For the second series arm, ADB
The voltage across points C-D is given as:

19
The value of resistor, R4 required to balance the bridge is given as:
We have seen above that the Wheatstone Bridge has two input terminals (A-
B) and two output terminals (C-D). When the bridge is balanced, the voltage
across the output terminals is 0 volts. When the bridge is unbalanced,
however, the output voltage may be either positive or negative depending
upon the direction of unbalance.

20
Wheatstone Bridge Light Detector
Balanced bridge circuits find many useful electronics applications such as being
used to measure changes in light intensity, pressure or strain. The types of
resistive sensors that can be used within a wheatstone bridge circuit include:
photoresistive sensors (LDR’s), positional sensors (potentiometers),
piezoresistive sensors (strain gauges) and temperature sensors (thermistor’s),
etc.
There are many wheatstone bridge applications for sensing a whole range of
mechanical and electrical quantities, but one very simple wheatstone bridge
application is in the measurement of light by using a photoresistive device. One
of the resistors within the bridge network is replaced by a light dependent
resistor, or LDR.
An LDR, also known as a cadmium-sulphide (Cds) photocell, is a passive
resistive sensor which converts changes in visible light levels into a change in
resistance and hence a voltage. Light dependent resistors can be used for
monitoring and measuring the level of light intensity, or whether a light source
is ON or OFF.

21
A typical Cadmium Sulphide (CdS) cell such as the ORP12 light dependent
resistor typically has a resistance of about one Mega ohm (MΩ) in dark or
dim light, about 900Ω at a light intensity of 100 Lux (typical of a well lit
room), down to about 30Ω in bright sunlight. Then as the light intensity
increases the resistance reduces. By connecting a light dependant resistor to
the Wheatstone bridge circuit above, we can monitor and measure any
changes in the light levels as shown.
Figure 7: Wheatstone Bridge Light Detector

22
The LDR photocell is connected into the Wheatstone Bridge circuit as
shown to produce a light sensitive switch that activates when the light level
being sensed goes above or below the pre-set value determined by VR1. In
this example VR1 either a 22k or 47k potentiometer.
The op-amp is connected as a voltage comparator with the reference
voltage VD applied to the inverting pin. In this example, as
both R3 and R4 are of the same 10kΩ value, the reference voltage set at
point D will therefore be equal to half of Vcc. That is Vcc/2.
The potentiometer, VR1 sets the trip point voltage VC, applied to the non-
inverting input and is set to the required nominal light level. The relay turns
“ON” when the voltage at point C is less than the voltage at point D.

23
Adjusting VR1 sets the voltage at point C to balance the bridge circuit at the
required light level or intensity. The LDR can be any cadmium sulphide
device that has a high impedance at low light levels and a low impedance at
high light levels.
Note that the circuit can be used to act as a “light-activated” switching
circuit or a “dark-activated” switching circuit simply by transposing
the LDR and R3 positions within the design.
The Wheatstone Bridge has many uses in electronic circuits other than
comparing an unknown resistance with a known resistance. When used with
operational amplifier, the Wheatstone bridge circuit can be used to measure
and amplify small changes in resistance, RX due, for example, to changes in
light intensity as we have seen above.

24
But the bridge circuit is also suitable for measuring the resistance change of
other changing quantities, so by replacing the above photo-resistive LDR
light sensor for a thermistor, pressure sensor, strain gauge, and other such
transducers, as well as swapping the positions of the LDR and VR1, we can
use them in a variety of other Wheatstone bridge applications.
Also more than one resistive sensor can be used within the four arms (or
branches) of the bridge formed by the resistors R1 to R4 to produce “full-
bridge”, “half-bridge” or “quarter-bridge circuit arrangements providing
thermal compensation or automatic balancing of the Wheatstone bridge.

25
Wien Bridge Oscillator
One of the simplest sine wave oscillators which uses a RC network in place of
the conventional LC tuned tank circuit to produce a sinusoidal output
waveform, is called a Wien Bridge Oscillator.
The Wien Bridge Oscillator is so called because the circuit is based on a
frequency-selective form of the Wheatstone bridge circuit. The Wien Bridge
oscillator is a two-stage RC coupled amplifier circuit that has good stability at
its resonant frequency, low distortion and is very easy to tune making it a
popular circuit as an audio frequency oscillator but the phase shift of the output
signal is considerably different from the phase shift RC Oscillator.
The Wien Bridge Oscillator uses a feedback circuit consisting of a
series RC circuit connected with a parallel RC of the same component values
producing a phase delay or phase advance circuit depending upon the
frequency. At the resonant frequency ƒr the phase shift is 0o. Consider the
circuit below.

26
Figure 8: Wien Bridge
Wien Bridge Oscillator Frequency,
Where:
ƒr is the Resonant Frequency in Hertz
R is the Resistance in Ohms
C is the Capacitance in Farads

27
We know that the magnitude of the output voltage, Vout from the RC
network is at its maximum value and equal to one third (1/3) of the input
voltage, Vin to allow for oscillations to occur. But why one third and not
some other value. In order to understand why the output from the RC
circuit above needs to be one-third, that is 0.333xVin, we have to consider
the complex impedance (Z = R ± jX) of the two connected RC circuits.
We know that the real part of the complex impedance is the
resistance, R while the imaginary part is the reactance, X. As we are
dealing with capacitors here, the reactance part will be capacitive
reactance, Xc.

28
The RC Network
If we redraw the above RC network as shown, we can clearly see that it
consists of two RC circuits connected together with the output taken from
their junction. Resistor R1 and capacitor C1 form the top series network,
while resistor R2 and capacitor C2 form the bottom parallel network.
Therefore the total impedance of the series combination (R1C1) we can
call, ZS and the total impedance of the parallel combination (R2C2) we can
call, ZP. As ZS and ZP are effectively connected together in series across the
input, VIN, they form a voltage divider network with the output taken from
across ZPas shown.
Lets assume then that the component values of R1 and R2 are the same
at: 12kΩ, capacitors C1 and C2 are the same at: 3.9nF and the supply
frequency, ƒ is 3.4kHz.

29
Series Circuit
The total impedance of the series combination with resistor, R1 and
capacitor, C1 is simply:

30
We now know that with a supply frequency of 3.4kHz, the reactance of
the capacitor is the same as the resistance of the resistor at 12kΩ. This
then gives us an upper series impedance ZS of 17kΩ.
For the lower parallel impedance ZP, as the two components are in
parallel, we have to treat this differently because the impedance of the
parallel circuit is influenced by this parallel combination.
Parallel Circuit
The total impedance of the lower parallel combination with resistor, R2 and
capacitor, C2 is given as:

31
At the supply frequency of 3400Hz, or 3.4kHz, the combined resistance
and reactance of the RC parallel circuit becomes 6kΩ (R||Xc) and their
parallel impedance is therefore calculated as:
So we now have the value for the series impedance of: 17kΩ’s,
( ZS = 17kΩ ) and for the parallel impedance of: 8.5kΩ’s, ( ZS = 8.5kΩ ).
Therefore the output impedance, Zout of the voltage divider network at the
given frequency is:

32
Then at the oscillation frequency, the magnitude of the output
voltage, Vout will be equal to Zout x Vin which as shown is equal to one
third (1/3) of the input voltage, Vin and it is this frequency
selective RC network which forms the basis of the Wien Bridge
Oscillator circuit.
If we now place this RC network across a non-inverting amplifier which
has a gain of 1+R1/R2 the following basic Wien bridge oscillator circuit is
produced.
Figure 9: Wien bridge oscillator

33
The output of the operational amplifier is fed back to both the inputs of the
amplifier. One part of the feedback signal is connected to the inverting input
terminal (negative feedback) via the resistor divider network
of R1 and R2 which allows the amplifiers voltage gain to be adjusted within
narrow limits. The other part is fed back to the non-inverting input terminal
(positive feedback) via the RC Wien Bridge network.
The RC network is connected in the positive feedback path of the amplifier
and has zero phase shift a just one frequency. Then at the selected resonant
frequency, (ƒr) the voltages applied to the inverting and non-inverting inputs
will be equal and “in-phase” so the positive feedback will cancel out the
negative feedback signal causing the circuit to oscillate.
The voltage gain of the amplifier circuit MUST be equal too or greater than
three “Gain = 3” for oscillations to start because as we have seen above, the
input is 1/3 of the output. This value, ( Av ≥ 3 ) is set by the feedback
resistor network, R1 and R2 and for a non-inverting amplifier this is given as
the ratio 1+(R1/R2).

34
Also, due to the open-loop gain limitations of operational amplifiers,
frequencies above 1MHz are unachievable without the use of special high
frequency op-amps.
Example 2:
Determine the maximum and minimum frequency of oscillations of a Wien
Bridge Oscillator circuit having a resistor of 10kΩ and a variable capacitor
of 1nF to 1000nF.
The frequency of oscillations for a Wien Bridge Oscillator is given as:
Wien Bridge Oscillator Lowest Frequency,

35
Wien Bridge Oscillator Highest Frequency,
Example 3:
A Wien Bridge Oscillator circuit is required to generate a sinusoidal
waveform of 5,200 Hertz (5.2kHz). Calculate the values of the frequency
determining resistors R1 and R2and the two capacitors C1 and C2 to produce
the required frequency.
Also, if the oscillator circuit is based around a non-inverting operational
amplifier configuration, determine the minimum values for the gain resistors
to produce the required oscillations. Finally draw the resulting oscillator
circuit.

36
The frequency of oscillations for the Wien Bridge Oscillator was given as
5200 Hertz. If resistors R1 = R2 and capacitors C1 = C2 and we assume a
value for the feedback capacitors of 3.0nF, then the corresponding value
of the feedback resistors is calculated as:
For sinusoidal oscillations to begin, the voltage gain of the Wien Bridge
circuit must be equal too or greater than 3, ( Av ≥ 3 ). For a non-inverting
op-amp configuration, this value is set by the feedback resistor network
of R3 and R4 and is given as:

37
If we choose a value for resistor R3 of say, 100kΩ’s, then the value of
resistor R4 is calculated as:
While a gain of 3 is the minimum value required to ensure oscillations, in
reality a value a little higher than that is generally required. If we assume a
gain value of 3.1 then resistor R4 is recalculated to give a value of 47kΩ’s.
This gives the final Wien Bridge Oscillator circuit as:

38
Figure 10: Wien bridge oscillator circuit of example 3

39
Wien Bridge Oscillator Summary
Then for oscillations to occur in a Wien Bridge Oscillator circuit the following
conditions must apply.
• With no input signal a Wien Bridge Oscillator produces continuous output
oscillations.
• The Wien Bridge Oscillator can produce a large range of frequencies.
• The Voltage gain of the amplifier must be greater than 3.
• The RC network can be used with a non-inverting amplifier.
• The input resistance of the amplifier must be high compared to R so that
the RC network is not overloaded and alter the required conditions.
• The output resistance of the amplifier must be low so that the effect of external
loading is minimised.
• Some method of stabilizing the amplitude of the oscillations must be provided.
If the voltage gain of the amplifier is too small the desired oscillation will
decay and stop. If it is too large the output will saturate to the value of the
supply rails and distort.
• With amplitude stabilisation in the form of feedback diodes, oscillations from
the Wien Bridge oscillator can continue indefinitely.

40
Vector Voltmeter
The vector voltmeter is basically a new type of amplitude and phase measuring
device. It uses two samples to sample the two waves whose amplitudes and
relative phase are to be measured. It measures the voltages at two different points
in the circuit and also measures the phase difference between these voltages at
these two points.
In this voltmeter, two RF signals of same fundamental frequency (1 MHz to 1
GHz) are converted to two IF signals. The amplitudes, waveforms and the phase
relations of IF signals are same as that of RF signals. Thus, the fundamental
components of the RF signals. These fundamental components are filtered from
the IF signals and are measured by a voltmeter and a phase meter.
The block diagram of the vector voltmeter is shown in figure below.
The instrument consists of four sections:
(i) Two RF to IF converters
(ii) Automatic phase control circuit
(iii) Phase meter circuit
(iv) Voltmeter circuit

41

42
The channel A and B ate the two RF to IF converters. The RF signals are applied
to sampling gates. The sampling pulse generator controls the opening and closing
of the gates. The RF to IF converters and phase control circuit section produce
two 20 KHz sine waves with the same amplitudes and the same phase relationship
as that of the same amplitude and the same phase relationship as that of the
fundamental components of the RF signals applied to the channels A and B. The
turned amplifier extracts the 20 KHz fundamental component from these sine
waves.
The pulse control unit generates the sampling pulses for both the RF to IF
converters. The sampling pulse rate is controlled by voltage tuned oscillator for
which the tuning voltage is supplied by the automatic phase control unit. This
section locks the IF signal of channel A to a 20 KHz reference oscillator. Due to
this, the section is also called phase locked section.
The tuned amplifier passes only 20 KHz fundamental component of the IF signal
of each channel. Thus the output of each tuned amplifier maintains the original
phase relationship with respect to the signal in the other channel and also its
correct amplitude relationship.

43
These two filtered signals are then connected to the voltmeter circuit by a front
panel switch marked channel A and channel B. The appropriate meter range is
decided by the input attenuator. This attenuator is also a front panel control
marked amplitude range. It is basically a d.c. voltmeter and it consists of input
attenuator, feedback amplifier having fixed gain, the rectifier and filtering
arrangement and a d.c. voltmeter corresponding to the channel A and channel B.
To determine the phase difference, there exists a phase meter circuit. The signals
from channel A and B are applied to the amplifier and the limiter circuit. Due to
this the signals are amplified and limited i.e. clipped. This produces a square
wave signal at the output of each amplifier and limiter circuit. These square
waves are then applied to the phase shifting network.
The circuit in upper part i.e. channel A shifts the phase of the square waves by
+ 60° while the circuit in lower part i.e. channel B shifts the phase by −120°.The phase shifts are achieved by using capacitive networks and inverting, non-
inverting amplifiers. The shifted square wave signals are then applied to trigger
amplifiers.

44
These trigger amplifiers convert the square wave signals to the positive spikes
with very fast rise times. These spikes are used to trigger the bistable
multivibrator.
The signal from channel A is connected to set input of the multivibrator while the
signal from channel B is connected to the reset input of the multivibrator. Now of
the phase shift between the two signals is zero then the trigger pulses are +60° −−120° i.e. 180° out of phase due to phase shift circuitry. Hence in such a case
the bistable multivibrator produces a square waves which is symmetrical about
zero
Thus if there exists a phase shift between the two signals, the bistable
multivibrator produces asymmetrical square wave. Such asymmetrical signal is
used to control the current switch which is transistorised switch is during the
negative portion of the square waves. This switch connects the constant current
supply to the phase meter. When phase shift is 0°, then the current from constant
source is so adjusted that the meter reading is 0°. Depending upon the asymmetric
nature of the square waves, current by current source varies and causes the
appropriate reading of the phase difference, on the meter.

45
The main limitation of the meter is when the shift at the input side is 180° then the
square wave produced by the bistabel multivibrator cuases either zero current or
maximum current as in such a case square waves no longer remains square but
collapse into either positive or negative d.c. voltage. These maximum deviations
from the centre reading of 0° are marked on the meters as +180° and −180°. The
phase range can be selected by a front panel switch that places a shunt across the
phase meter and changes its sensitivity.
Features Of Vector Voltmeter
(1) The vector voltmeters cover a 1000 to 1 frequency range accomodating inputs
from few microvolts upto about 1 V without input attenuation. Thus it gives
broad frequency range.
(2) They allow voltage ratios to be measured over 70 to 80 dB range within a few
lengths of a decibel.
(3) The phase to be measured to an accuracy of about 1°.(4) Due to self locking feature, there is automatic tuning of the local oscillator in
each frequency range.
(5) Easy to operate, as simple as normal voltmeters.

46
A time-domain reflectometer (TDR) is an electronic instrument that
uses time-domain reflectometry to characterize and locate faults in
metallic cables (for example, twisted pair wire or coaxial cable). It can
also be used to locate discontinuities in a connector, printed circuit
board, or any other electrical path. The equivalent device for optical
fiber is an optical time-domain reflectometer.
Time Domain Reflectometer

47
Signal Transmitted Through And Reflected From A
Discontinuity

48
Generally, the reflections will have the same shape as the incident signal, but
their sign and magnitude depend on the change in impedance level. If there is a
step increase in the impedance, then the reflection will have the same sign as the
incident signal; if there is a step decrease in impedance, the reflection will have
the opposite sign. The magnitude of the reflection depends not only on the
amount of the impedance change, but also upon the loss in the conductor.
The reflections are measured at the output/input to the TDR and displayed or
plotted as a function of time. Alternatively, the display can be read as a function
of cable length because the speed of signal propagation is almost constant for a
given transmission medium.
Because of its sensitivity to impedance variations, a TDR may be used to verify
cable impedance characteristics, splice and connector locations and associated
losses, and estimate cable lengths.
Reflection

49
TDRs use different incident signals. Some TDRs transmit a pulse along the
conductor; the resolution of such instruments is often the width of the pulse.
Narrow pulses can offer good resolution, but they have high frequency
signal components that are attenuated in long cables. The shape of the
pulse is often a half cycle sinusoid. For longer cables, wider pulse widths
are used.
Fast rise time steps are also used. Instead of looking for the reflection of a
complete pulse, the instrument is concerned with the rising edge, which can
be very fast. A 1970s technology TDR used steps with a rise time of 25 ps.
Still other TDRs transmit complex signals and detect reflections with
correlation techniques. See spread-spectrum time-domain reflectometry.
Incident Signal

50
Usage Of Time Domain Reflectometer (TDR)
In a TDR-based level measurement device, the device generates an impulse
that propagates down a thin waveguide (referred to as a probe) - typically a
metal rod or a steel cable. When this impulse hits the surface of the medium
to be measured, part of the impulse reflects back up the waveguide. The
device determines the fluid level by measuring the time difference between
when the impulse was sent and when the reflection returned. The sensors can
output the analyzed level as a continuous analog signal or switch output
signals. In TDR technology, the impulse velocity is primarily affected by the
permittivity of the medium through which the pulse propagates, which can
vary greatly by the moisture content and temperature of the medium. In many
cases, this effect can be corrected without undue difficulty. In some cases,
such as in boiling and/or high temperature environments, the correction can be
difficult. In particular, determining the froth (foam) height and the collapsed
liquid level in a frothy / boiling medium can be very difficult.
TDR In Level Measurement

51
The Dam Safety Interest Group of CEA Technologies, Inc. (CEATI), a
consortium of electrical power organizations, has applied Spread-spectrum
time-domain reflectometry to identify potential faults in concrete dam
anchor cables. The key benefit of Time Domain reflectometry over other
testing methods is the non-destructive method of these tests.
TDR Used In Anchor Cable In Dam

52
TDR Used In The Earth And Agricultural Sciences
A TDR is used to determine moisture content in soil and porous media.
Over the last two decades, substantial advances have been made measuring
moisture in soil, grain, food stuff, and sediment. The key to TDR’s success
is its ability to accurately determine the permittivity (dielectric constant) of a
material from wave propagation, due to the strong relationship between the
permittivity of a material and its water content, as demonstrated in the
pioneering works of Hoekstra and Delaney (1974) and Topp et al. (1980).
Recent reviews and reference work on the subject include, Topp and
Reynolds (1998), Noborio (2001), Pettinellia et al. (2002), Topp and Ferre
(2002) and Robinson et al. (2003). The TDR method is a transmission line
technique, and determines apparent permittivity (Ka) from the travel time of
an electromagnetic wave that propagates along a transmission line, usually
two or more parallel metal rods embedded in soil or sediment. The probes
are typically between 10 and 30 cm long and connected to the TDR via
coaxial cable.

53
Time domain reflectometry has also been utilized to monitor slope movement
in a variety of geotechnical settings including highway cuts, rail beds, and open
pit mines (Dowding & O'Connor, 1984, 2000a, 2000b; Kane & Beck, 1999). In
stability monitoring applications using TDR, a coaxial cable is installed in a
vertical borehole passing through the region of concern. The electrical
impedance at any point along a coaxial cable changes with deformation of the
insulator between the conductors. A brittle grout surrounds the cable to
translate earth movement into an abrupt cable deformation that shows up as a
detectable peak in the reflectance trace. Until recently, the technique was
relatively insensitive to small slope movements and could not be automated
because it relied on human detection of changes in the reflectance trace over
time. Farrington and Sargand (2004) developed a simple signal processing
technique using numerical derivatives to extract reliable indications of slope
movement from the TDR data much earlier than by conventional interpretation.
TDR In Geotechnical Usage

54
Time domain reflectometry is used in semiconductor failure analysis as a
non-destructive method for the location of defects in semiconductor device
packages. The TDR provides an electrical signature of individual
conductive traces in the device package, and is useful for determining the
location of opens and shorts.
TDR In Semiconductor Device Analysis

55
TDR In Aviation Wiring Maintenance
Time domain reflectometry, specifically spread-spectrum time-domain
reflectometry is used on aviation wiring for both preventative maintenance
and fault location. Spread spectrum time domain reflectometry has the
advantage of precisely locating the fault location within thousands of miles of
aviation wiring. Additionally, this technology is worth considering for real
time aviation monitoring, as spread spectrum reflectometry can be employed
on live wires. This method has been shown to be useful to locating
intermittent electrical faults.

56
An optical time-domain reflectometer (OTDR) is an optoelectronic instrument
used to characterize an optical fiber. An OTDR is the optical equivalent of an
electronic time domain reflectometer. It injects a series of optical pulses into
the fiber under test and extracts, from the same end of the fiber, light that is
scattered (Rayleigh backscatter) or reflected back from points along the fiber.
The scattered or reflected light that is gathered back is used to characterize the
optical fiber. This is equivalent to the way that an electronic time-domain
meter measures reflections caused by changes in the impedance of the cable
under test. The strength of the return pulses is measured and integrated as a
function of time, and plotted as a function of fiber length.
Optical Time Domain Reflectometer

57
Optoelectronics
Optoelectronics is the study and application of electronic devices and
systems that source, detect and control light, usually considered a sub-
field of photonics. In this context, light often includes invisible forms of
radiation such as gamma rays, X-rays, ultraviolet and infrared, in addition
to visible light. Optoelectronic devices are electrical-to-optical or optical-
to-electrical transducers, or instruments that use such devices in their
operation. Electro-optics is often erroneously used as a synonym, but is a
wider branch of physics that concerns all interactions between light
and electric fields, whether or not they form part of an electronic device.
Optoelectronics is based on the quantum mechanical effects of light on
electronic materials, especially semiconductors, sometimes in the
presence of electric fields.

58
Light is electromagnetic radiation within a certain portion of
the electromagnetic spectrum. The word usually refers to visible light,
which is visible to the human eye and is responsible for the sense
of sight. Visible light is usually defined as having wavelengths in the range
of 400–700 nanometres (nm), or 4.00 × 10−7 to 7.00 × 10−7 m, between
the infrared (with longer wavelengths) and the ultraviolet (with shorter
wavelengths). This wavelength means a frequency range of roughly 430–
750 terahertz (THz). The main source of light on Earth is
the Sun. Sunlight provides the energy that green plants use to create sugars
mostly in the form of starches, which release energy into the living things
that digest them. This process of photosynthesis provides virtually all the
energy used by living things. Historically, another important source of light
for humans has been fire, from ancient campfires to modern kerosene lamps.
With the development of electric lights and power systems, electric lighting
has effectively replaced firelight.
Light

59

60
Reliability And Quality Of OTDR Equipment
The reliability and quality of an OTDR is based on its accuracy,
measurement range, ability to resolve and measure closely spaced events,
measurement speed, and ability to perform satisfactorily under various
environmental extremes and after various types of physical abuse. The
instrument is also judged on the basis of its cost, features provided, size,
weight, and ease of use.
Some of the terms often used in specifying the quality of an OTDR are as
follows:
• Accuracy
• Measurement Range
• Instrument Resolution

61
Defined as the correctness of the measurement i.e., the difference between the
measured value and the true value of the event being measured.
Accuracy
Measurement Range
Defined as the maximum attenuation that can be placed between the instrument
and the event being measured, for which the instrument will still be able to
measure the event within acceptable accuracy limits.

62
Instrument resolution is a measure of how close two events can be spaced
and still be recognized as two separate events. The duration of the
measurement pulse and the data sampling interval create a resolution
limitation for OTDRs. The shorter the pulse duration and the shorter the
data sampling interval, the better the instrument resolution, but the shorter
the measurement range. Resolution is also often limited when powerful
reflections return to the OTDR and temporarily overload the detector.
When this occurs, some time is required before the instrument can resolve a
second fiber event. Some OTDR manufacturers use a “masking” procedure
to improve resolution. The procedure shields or “masks” the detector from
high-power fiber reflections, preventing detector overload and eliminating
the need for detector recovery.
Instrument Resolution

63
This application note provides a summary description of the operation and
capabilities of a Vector Network Analyser (VNA), including general
considerations of front panel operation and measurement methods. Included in
this paper are discussions on the following topics:
• System description
• General discussion about network analysers
• Basic measurements and how to make them
• Error correction
• General discussion on test sets
For detailed information regarding calibration techniques, accuracy
considerations, or specific measurement applications, pleaser refer to additional
manufacturer application notes and technical papers.
Vector Network Analyser
Introduction

64
Anritsu Vector Network Analyzers measure the magnitude and phase
characteristics of networks, amplifiers, components, cables, and antennas. They
compare the incident signal that leaves the analyzer with either the signal that is
transmitted through the test device or the signal that is reflected from its input.
Figure 11 and Figure 12 illustrate the types of measurements that the VNA
performs.
VNAs are self contained, fully integrated measurement systems that include an
optional time domain capability. The system hardware consists of the following:
• Analyser
• Precision components required for calibration and performance
verification
• Optional use of synthesizers used as a second source
• Optional use of power meters for test port power leveling
and calibration
General Description

65
Transmission Measurements
Figure 11

66
Reflection Measurements
Figure 12

67
Source Module
The VNA Internal System Module Perform The Following Functions
This module provides the stimulus to the device under test (DUT). The
frequency ranges of both the source and the test set modules establish the
frequency range of the system. The frequency stability of the source is an
important factor in the accuracy (especially phase accuracy) of the network
analyser. Hence, VNAs always phase lock the source to an internal crystal
reference for a synthesized, step sweep mode of operation. VNAs avoid the
use of unlocked, analog sweep modes because of the sacrifices in
measurement stability, phase performance, and group delay accuracy.

68
Test Set Module
The test set module routes the stimulus signal to the DUT and samples the
reflected and transmitted signals. The type of connector that is used is
important, as is the “Auto Reversing” feature. Auto Reversing means that
the stimulus signal is applied in both the forward and reverse directions.
The direction is reversed automatically. This saves you from having to
reverse the test device physically in order to measure all four scattering
parameters (S-parameters). It also increases accuracy by reducing
connector repeatability errors. Frequency conversion to the IF range also
occurs in the test set module.

69
Analyser Module
The analyser module receives and interprets the IF signal for phase
and magnitude data. It then displays the results of this analysis on a
high resolution display screen. This display can show all four S-
parameters simultaneously as well as a variety of other forms of
displayed information such as Group Delay, Time and Distance
information, and complex impedance information. In addition to the
installed display, you can also view the measurement results on an
external monitor.

70
We will begin this discussion with a subject familiar to most
microwave test equipment users: scalar network analysis. After
showing comparisons, we will proceed to the fundamentals of
network analyzer terminology and techniques. This discussion
serves as an introduction to topics that are presented in greater
detail later in this section. This discussion will touch on new
concepts that include the following:
• Reference Delay
• S-parameters: what they are and how they are displayed
• Complex Impedance and Smith Charts
Network Analyser

71
Vector Network Analyzers do everything that scalar analyzers do, plus they add the ability
to measure the phase characteristics of microwave devices over a greater dynamic range
and with more accuracy.
If all a vector network analyzer added was the capability for measuring phase
characteristics, its usefulness would be limited. While phase measurements are important
in themselves, the availability of phase information provides the potential for many new
features for complex measurements. These features include Smith Charts, Time Domain,
and Group Delay. Phase information also allows greater accuracy through vector error
correction of the measured signal.
First, let us look at scalar network analyzers (SNAs). SNAs measure microwave signals
by converting them to a DC voltage using a diode detector (Figure 13). This DC voltage is
proportional to the magnitude of the incoming signal. The detection process, however,
ignores any information regarding the phase of the microwave signal. Also, a detector is a
broadband detection device, which means that all frequencies (the fundamental, harmonic,
sub harmonic, and spurious signals) are detected and simultaneously displayed as one
signal. This, of course, adds significant error to both the absolute and relative
measurements.
Scalar Analyser Comparison

72
In a vector network analyser, information is extracted of both the magnitude and
phase of a microwave signal. While there are different ways to perform the
measurement, the method the VNA employs is to down convert the signal to a
lower intermediate frequency (harmonic sampling). This signal can then be
measured directly by a tuned receiver. The tuned receiver approach gives the
system greater dynamic range due to the variable IF filter bandwidth control.
The system is also much less sensitive to interfering signals, including
harmonics.
Figure 13

73
The vector network analyser is a tuned receiver (Figure 14). The microwave
signal is down converted into the passband of the IF. To measure the phase
of this signal as it passes through the DUT, we must have a reference to
compare. If the phase of a signal is 90 degrees, it is 90 degrees different
from the reference signal (Figure 15). The vector network analyzer would
read this as –90 degrees, since the test signal is delayed by 90 degrees with
respect to the reference signal.
The phase reference can be obtained by splitting off a portion of the
microwave signal before the measurement (Figure 16).
The phase of the microwave signal after it has passed through the DUT is
then compared with the reference signal. A network analyzer test set
automatically samples the reference signal, so no external hardware is
needed.
Vector Network Analyser Basics

74
Vector Network Analyser Is A Tuned Receiver
Figure 14

75
Signals With A 90 Degree Phase Difference
Figure 15

76
Splitting The Microwave Signal
Figure 16

77
Let us consider the case when the DUT is removed, and a length of
transmission line is substituted (Figure 17). Note that the path length
of the test signal is longer than that of the reference signal. Let us see
how this affects our measurement.
Assume that we are making a measurement at 1 GHz, and that the
difference in path length between the two signals is exactly 1
wavelength. This means that test signal is lagging the reference signal
by 360 degrees (Figure 18). We cannot really tell the difference
between one sine wave maxima and the next (they are all identical),
so the network analyzer would measure a phase difference of 0
degrees.

78
Split Signal Where A Length Of The Line Replaces DUT
Figure 17

79
Split Signal Where Path Length Differs By Exactly One Wavelength
Figure 18

80
Now consider that we make this same measurement at 1.1 GHz. Since the
frequency is higher by 10 percent, the wavelength of the signal is shorter by 10
percent. The test signal path length is now 0.1 wavelength longer than that of
the reference signal (Figure 19).
This test signal is: 1.1 X 360 = 396 degrees
This is 36 degrees different from the phase measurement at 1 GHz.
The network analyzer will display this phase difference as –36 degrees.
The test signal at 1.1 GHz is delayed by 36 degrees more than the test signal at
1 GHz.
You can see that if the measurement frequency is 1.2 GHz, then we will get a
reading of –72 degrees, –108 degrees for 1.3 GHz, and so forth. (Figure 20).
An electrical delay occurs between the reference and test signals. For this
delay, we will use the common industry term of reference delay. You also may
hear it called phase delay. In older network analyzers, the length of the
reference path had to be constantly adjusted relative to the test path in order to
make an appropriate measurement of phase versus frequency.

81
Figure 19
Split Signal Where Path Length Is Longer Than One Wavelength

82
Figure 20
Electrical Delay

83
To measure phase on a DUT, we need to remove this phase change
versus frequency due to changes in the electrical length. This will allow
us to view the actual phase characteristics of the device, which may be
much smaller than the phase change due to electrical length difference
of the two paths.
This can be accomplished in two ways. The most obvious way is to
insert a length of line into the reference signal path to make both paths
of equal length (Figure 21). With perfect transmission lines and a
perfect splitter, we would then measure a constant phase as we change
the frequency. The problem using this approach is that we must change
the line length with each measurement setup.

84
Figure 21
Split Signals Where Paths Are Of Equal Length

85
Another approach is to handle the path length difference in
software. Figure 22 displays the phase versus frequency of a
device. This device has different effects on the output phase at
different frequencies. Because of these differences, we do not have
a perfectly linear phase response. We can easily detect this phase
deviation by compensating for the linear phase. The size of the
phase difference increases linearly with frequency, so we can
modify the phase display to eliminate this delay.
VNAs offer automatic reference delay compensation with the push
of a button. Figure 23 shows the resultant measurement when we
compensate path length. In a system application, you can usually
correct for length differences; however, the residual phase
characteristics are critical.

86
Figure 22
Phase Difference Increases Linearly With Frequency

87
Figure 23
Resultant Phase With Path Length

88
Now let us consider measuring the DUT. Consider a two port device; that is, a
device with a connector on each end. What measurements would be of interest?
First, we could measure the reflection characteristics at either end with the opposite
end terminated into 50 ohms. If we designate one of the inputs as Port 1 of the
device, then we have a reference port. We can then define the reflection
characteristics from the reference end as forward reflection, and those from the
other end as reverse reflection (Figure 24).
Second, we can measure the forward and reverse transmission characteristics.
However, instead of saying “forward,” “reverse,” “reflection,” and “transmission”
all the time, we use a shorthand. That is all that S-parameters are, shorthand! The
“S” stands for scattering. The second number is the device port that the signal is
being injected into, while the first is the device port that the signal is leaving. S11,
therefore, is the signal leaving port 1 relative to the signal injected into port 1.
The four scattering parameters (Figure 25) are:
• S11 Forward Reflection
• S21 Forward Transmission
• S22 Reverse Reflection
• S12 Reverse Transmission
Network Analyser Measurement

89
Figure 24
Forward And Reverse Measurement

90
Figure 25
S-Parameter

91
S-parameters can be displayed in many ways. An S-parameter
consists of a magnitude and a phase. We can display the magnitude
in dB, just like a scalar network analyzer. We often call this term
log magnitude. Another method of magnitude display is to use
Units instead of dB. When displaying magnitude in Units, the
value of the reflected or transmitted signal will be between 0 and 1
relative to the reference.
We can display phase as “linear phase” (Figure 26). As discussed
earlier, we cannot tell the difference between one cycle and the
next. Therefore, after going through 360 degrees, we are back to
where we began. We can display the measurement from –180 to
+180 degrees, which is a more common approach. This method
keeps the display discontinuity removed from the important 0
degree area that is used as the phase reference.

92
Figure 26
Linear Phase With Frequency Waveform

93
Several methods are available to display all of the information
on one trace. One method is a polar display (Figure 27). The
radial parameter (distance from the center) is magnitude. The
rotation around the circle is phase. We sometimes use polar
displays to view transmission measurements, especially on
cascaded devices (devices in series). The transmission result is
the addition of the phase and the log magnitude (dB)
information in the polar display of each device.

94
Figure 27
Polar Display

95
Spectrum Analyser
Introduction
• A spectrum in the practical sense is a collection of sine waves , when
combined properly produces the required time domain signal.
• The frequency domain also has its measurement strengths.
• The frequency domain is better for determining the harmonic
content of a signal.
A spectrum analyser is a device used to examine the spectral
composition of some electrical, acoustic, or optical waveform. Mostly
it finds application in measurement of power spectrum .

96

97

98
Analog Spectrum Analyser
An analog spectrum analyser uses either a variable bandpass filter
whose mid-frequency is automatically tuned (shifted, swept)
through the range of frequencies of which the spectrum is to be
measured or a superheterodyne receiver where the local oscillator
is swept through a range of frequencies.

99
Digital Spectrum Analyser
A digital spectrum analyser computes the Fast Fourier Transform
(FFT), a mathematical process that transforms a waveform into
the components of its frequency spectrum

100
Spectrum Analysis
• In various field operations involving signals there is need to
ascertain the nature of the signal at several points.
• Signal characteristics affect the parameters of operation of a
system.
• Spectrum analysis mostly involves study of the signal entering
a system or that produced by it.
• Spectrum analysers usually display raw, unprocessed signal
information such as voltage, power, period, waveshape,
sidebands and frequency. They can provide with a clear and
precise window into the frequency spectrum.

101
The Basic Types
Fast Fourier Transform (FFT) Spectrum Analyser
The Fourier analyser basically takes a time-domain signal,
digitises it using digital sampling, and then performs the
mathematics required to convert it to the frequency domain, and
display the resulting spectrum.

102
Swept Spectrum Analyser
The most common type of spectrum analyser is the swept-tuned
receiver. It is the most widely accepted, general-purpose tool for
frequency-domain measurements. The technique most widely
used is superheterodyne.

103
FFT Spectrum Analyser
The Measurement System
• The analyser is looking at the entire frequency range at the
same time using parallel filters measuring simultaneously.
• It is actually capturing the time domain information which
contains all the frequency information in it.
• With its real-time signal analysis capability, the Fourier
analyser is able to capture periodic as well as random and
transient events.
• It also can provide significant speed improvement over the
more traditional swept analyser and can measure phase as well
as magnitude.

104
Swept Spectrum Analyser
• Very basically, these analysers "sweep" across the frequency range of
interest, displaying all the frequency components present.
• The swept-tuned analyser works just like the AM radio in your home
except that on your radio, the dial controls the tuning and instead of a
display, your radio has a speaker.
• The swept receiver technique enables frequency domain measurements
to be made over a large dynamic range and a wide frequency range.
• It has significant contributions to frequency-domain signal analysis for
numerous applications, including the manufacture and maintenance of
microwave communications links, radar, telecommunications
equipment, cable TV systems, and broadcast equipment; mobile
communication systems; EMI diagnostic testing; component testing;
and signal surveillance.

105
Theory Of Operation

106
The major components in a spectrum analyser are:
• RF input attenuator, mixer,
• IF (Intermediate Frequency) gain,
• IF filter, detector,
• Video filter,
• Local oscillator,
• Sweep generator
• CRT display.
Components In Spectrum Analyser

107
Mixer

108
• A mixer is a device that converts a signal from one frequency to
another.
• It is sometimes called a frequency-translation device.
• A mixer is a non-linear device (frequencies are present at the output
that were not present at the input).
• The output of a mixer consists of the two original signals 𝑓Sig and
𝑓LO as well as the sum 𝑓LO + 𝑓Sig and difference 𝑓LO − 𝑓Sigfrequencies of these two signals.
• In a spectrum analyser, the difference frequency is actually the
frequency of interest. The mixer has converted our RF input signal
to an IF (Intermediate Frequency) signal that the analyser can now
filter, amplify and detect for the purpose of displaying the signal on
the screen.

109
IF Filter
IF Filter

110
• The IF filter is a bandpass filter which is used as the "window" for
detecting signals.
• It's bandwidth is also called the resolution bandwidth (RBW) of the
analyser and can be changed via the front panel of the analyser.
• By giving a broad range of variable resolution bandwidth settings , the
instrument can be optimized for the sweep and signal conditions,
letting trade-off frequency selectivity (the ability to resolve signals),
signal-to-noise ratio (SNR), and measurement speed.
• As RBW is narrowed, selectivity is improved (we are able to resolve
the two input signals). This will also often improve SNR.

111
Detector

112
• The analyser must convert the IF signal to a baseband or video
signal so it can be viewed on the instrument's display. This is
accomplished with an envelope detector which then deflects the
CRT beam on the y-axis, or amplitude axis.
• Many modern spectrum analysers have digital displays which first
digitise the video signal with an analog-to-digital converter (ADC).
• The positive-peak detector mode captures and displays the peak
value of the signal over the duration of one trace element.
• The negative-peak detector mode captures the minimum value of
the signal for each bin.

113
Video Filter

114
• The video filter is a low-pass filter that is located after the
envelope detector and before the ADC.
• This filter determines the bandwidth of the video amplifier,
and is used to average or smooth the trace seen on the screen.
• By changing the video bandwidth (VBW) setting, we can
decrease the peak-to-peak variations of noise.

115
Other Components

116
• The local oscillator is a Voltage Controlled Oscillator (VCO) which in effect
tunes the analyser.
• The sweep generator actually tunes the LO so that its frequency changes in
proportion to the ramp voltage.
• This also deflects the CRT beam horizontally across the screen from left to
right, creating the frequency domain in the x-axis.
• The RF input attenuator is a step attenuator located between the input
connector and the first mixer. It is also called the RF attenuator.
• This is used to adjust the level of the signal incident upon the first mixer.
• This is important in order to prevent mixer gain compression and distortion due
to high-level and/or broadband signals.
• The IF gain is located after the mixer but before the IF, or RBW, filter.
• This is used to adjust the vertical position of signals on the display without
affecting the signal level at the input mixer.
• When it changed, the value of the reference level is changed accordingly.
• The IF gain will automatically be changed to compensate for input attenuator
changes, so signals remain stationary on the CRT display, and the reference
level is not changed.
The Auxillaries

117
How It All Work Together

118
• First of all, the signal to be analyzed is connected to the input of the
spectrum analyser. This input signal is then combined with the LO through
the mixer, to convert (or translate) it to an intermediate frequency (IF).
• These signals are then sent to the IF filter.
• The output of this filter is detected, indicating the presence of a signal
component at the analyser’s tuned frequency. The output voltage of the
detector is used to drive the vertical axis (amplitude) of the analyser display.
• The sweep generator provides synchronization between the horizontal axis of
the display (frequency) and tuning of the LO. The resulting display shows
amplitude versus frequency of spectral components of each incoming signal.
• The horizontal arrows are intended to illustrate the "sweeping" of the
analyser. Starting with LO at 3.6 GHz, the output of the mixer has four
signals, one of which is at 3.6 GHz 𝑓LO .

119
• IF filter is also at 3.6 GHz (it's shape has been imposed onto the frequency
graph for clarity). Therefore, we expect to see this signal on the display. At 0
Hz on the CRT, we do indeed see a signal - this is called "LO Feed through".
• Sweep generator moving to the right, causes the LO to sweep upward in
frequency. As the LO sweeps, so two will three of the mixer output signals
(the input signal is stationary).
• As the LO Feedthrough moves out of the IF filter bandwidth, we see it taper
off on the display. As soon as the difference frequency 𝑓LO − 𝑓S comes into
the envelop of the IF filter, we start to see it.
• When it is at the center (e.g. 3.6 GHz) we see the full amplitude of this signal
on the display.
• And, as it moves further to the right, it leaves the filter envelop, and no signal
is seen on the display.
• The signal is being swept through the fixed IF filter, and properly displayed
on the analyser screen.

120
Front Panel Operation

References
121
(1) Chaniotakis and Cory, Introduction to Electronics, Signals and
Measurement, Massachusetts Institute of Technology, 2006.
(2) A. V. Bakshi and U. A. Bakshi, Electronic Measurements and
Instrumentation, 2008.
(3) Anritsu, Vector Network Analyser Primer, Application Note, 2009