Embed Size (px)
Citation preview

Swarming RobotsReal and Simulated
Fredrik Jansson20.11.2015
Swarm Organ Project
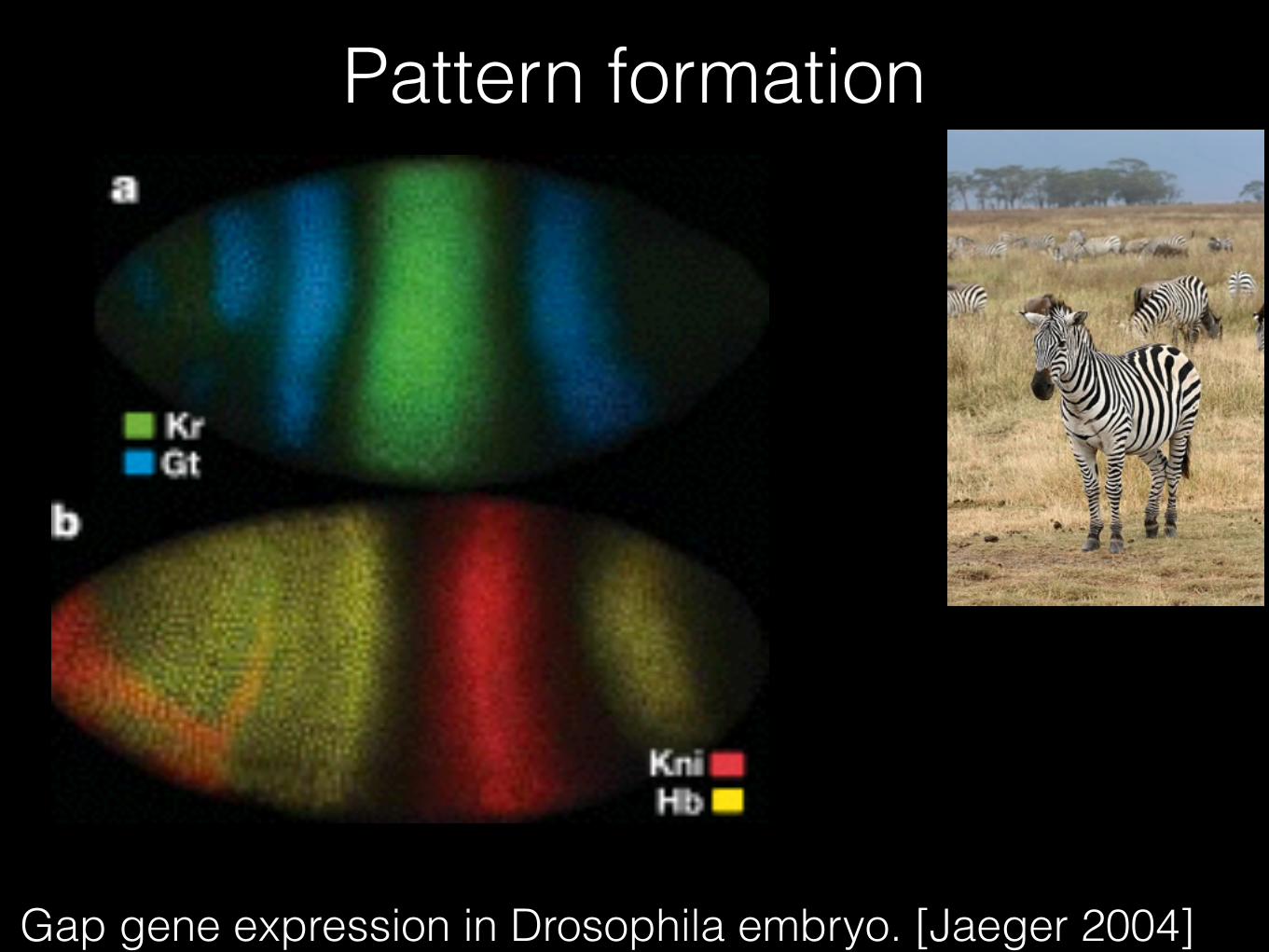
Pattern formation
Gap gene expression in Drosophila embryo. [Jaeger 2004]
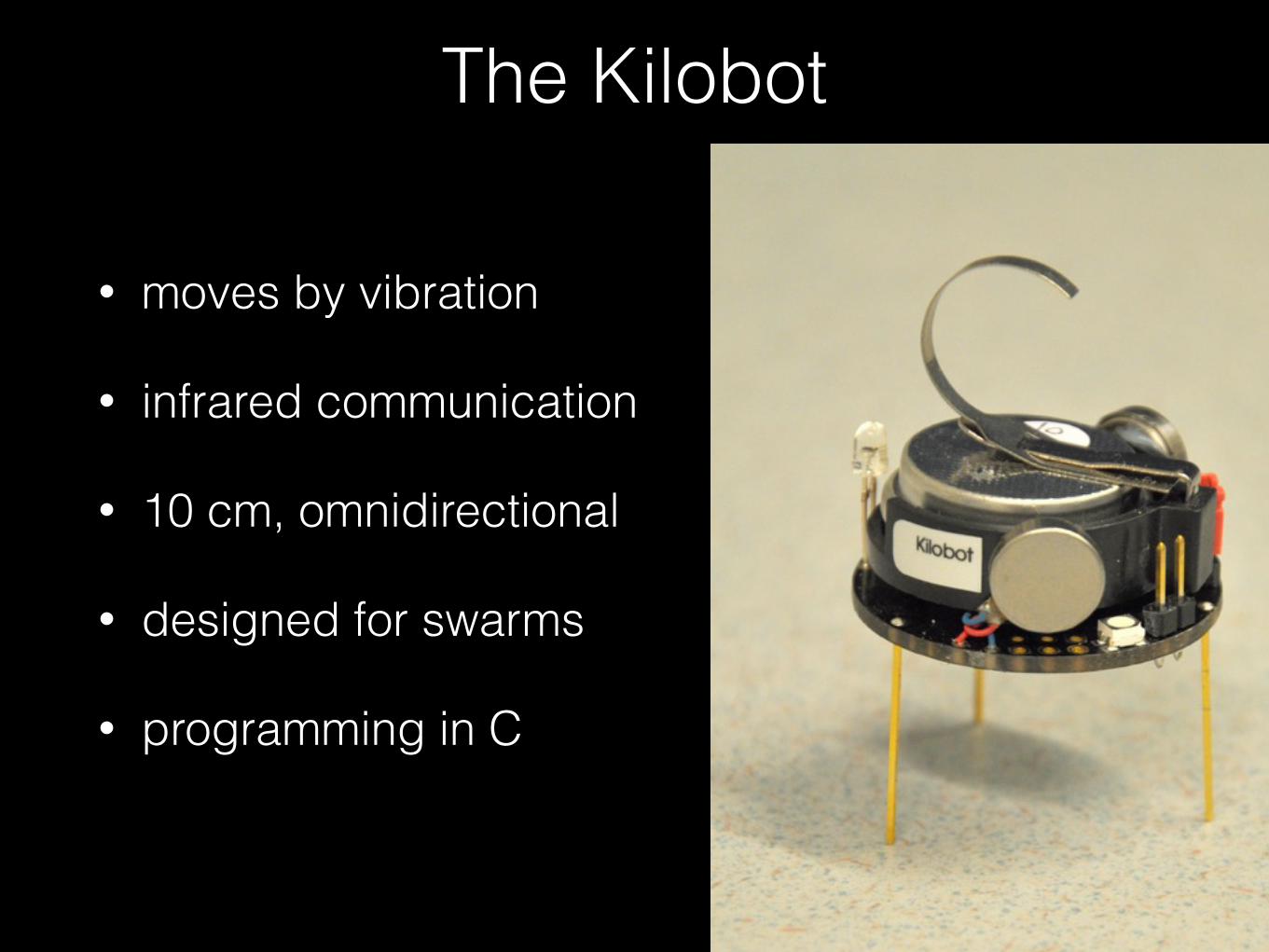
The Kilobot
• moves by vibration
• infrared communication
• 10 cm, omnidirectional
• designed for swarms
• programming in C
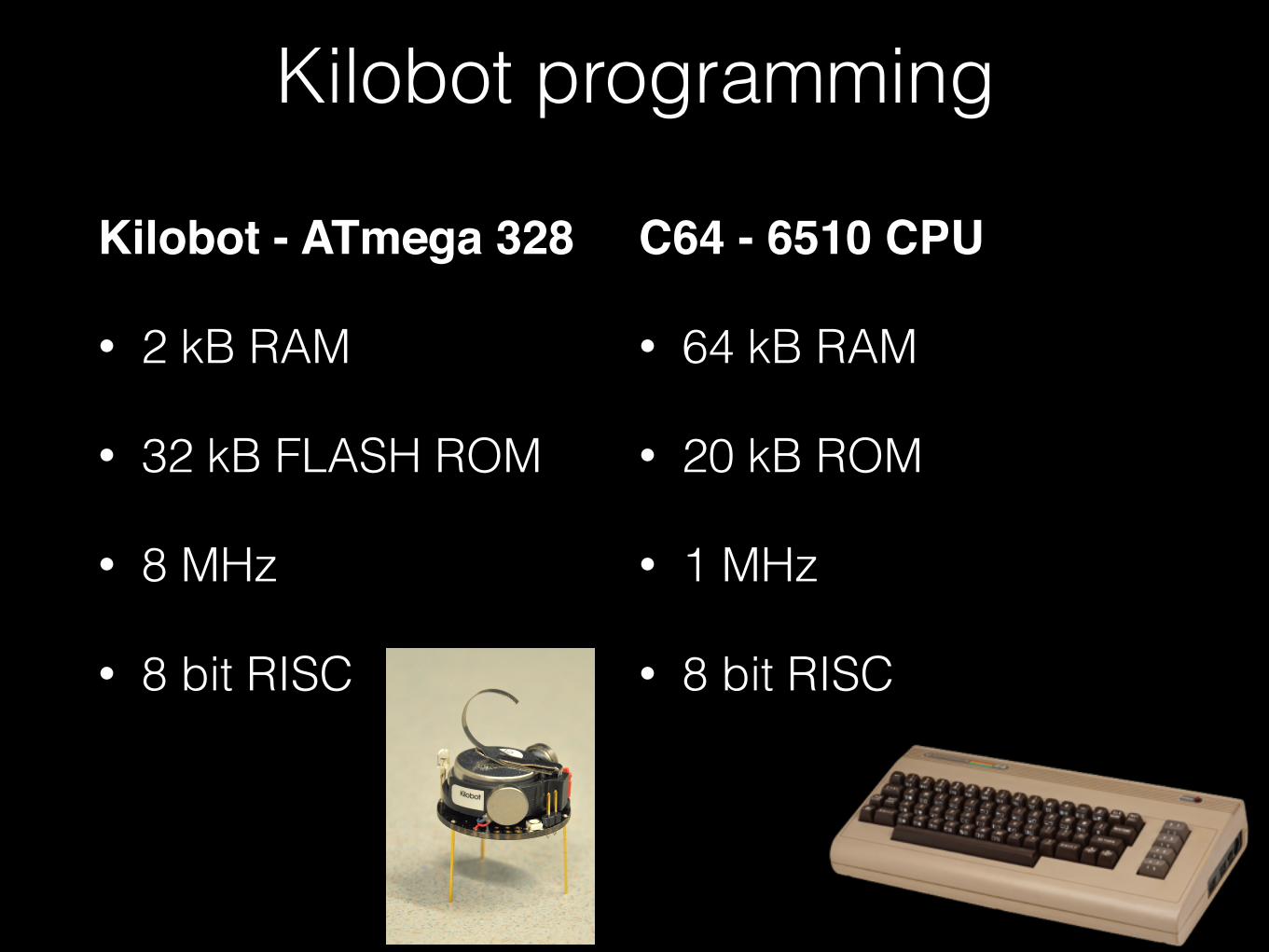
Kilobot programming
Kilobot - ATmega 328
• 2 kB RAM
• 32 kB FLASH ROM
• 8 MHz
• 8 bit RISC
C64 - 6510 CPU
• 64 kB RAM
• 20 kB ROM
• 1 MHz
• 8 bit RISC
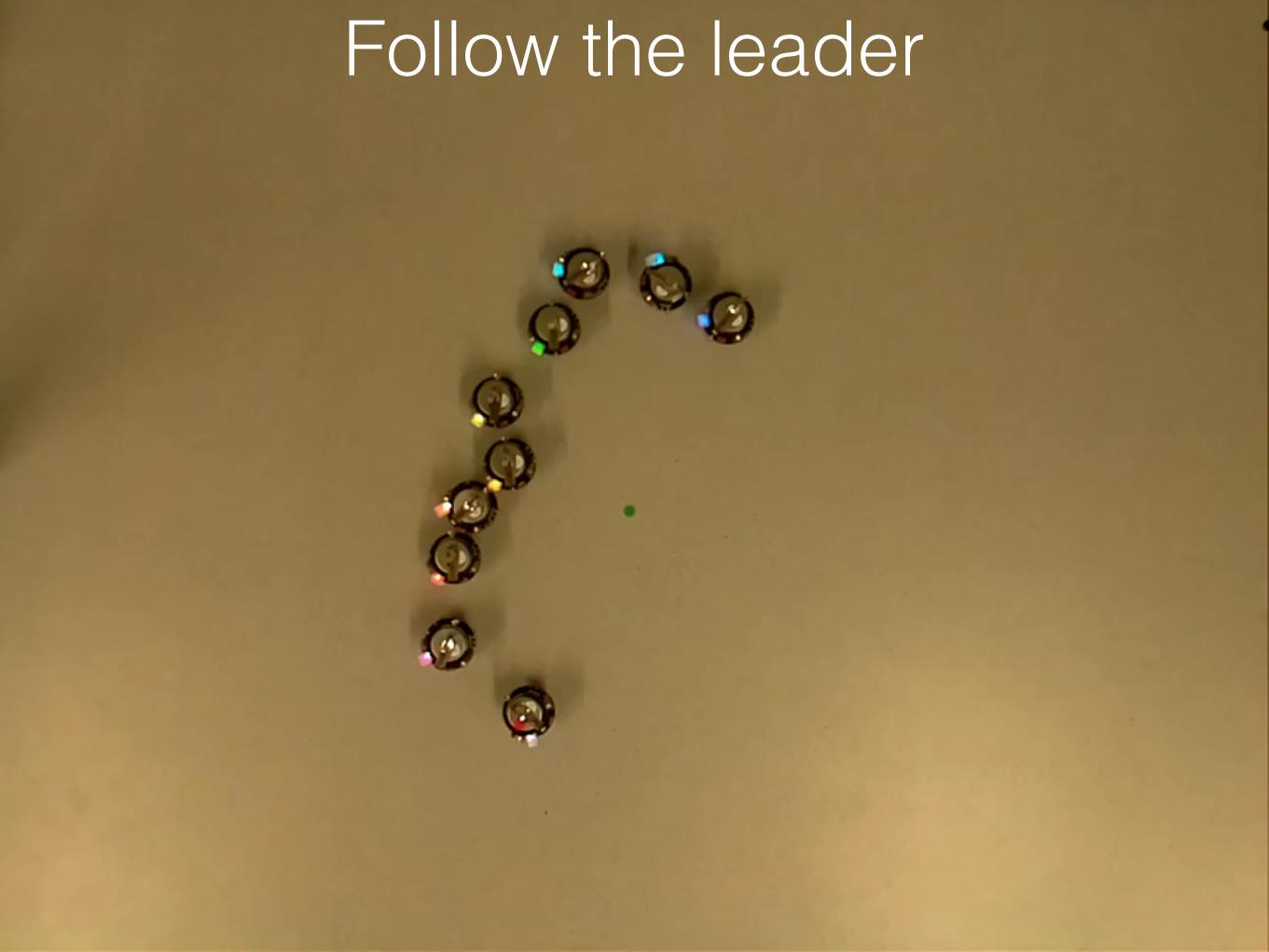
Follow the leader
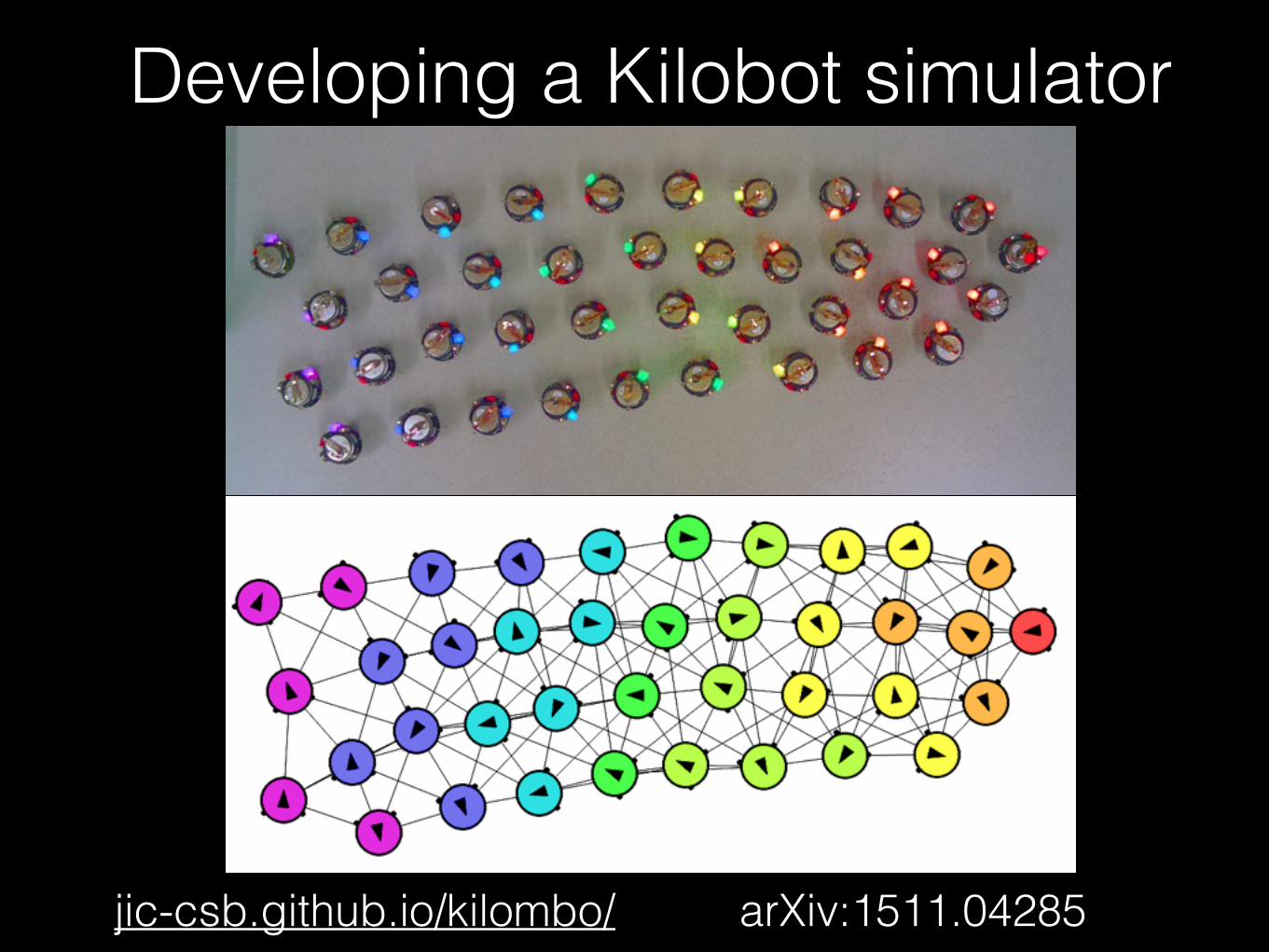
Developing a Kilobot simulator
jic-csb.github.io/kilombo/ arXiv:1511.04285
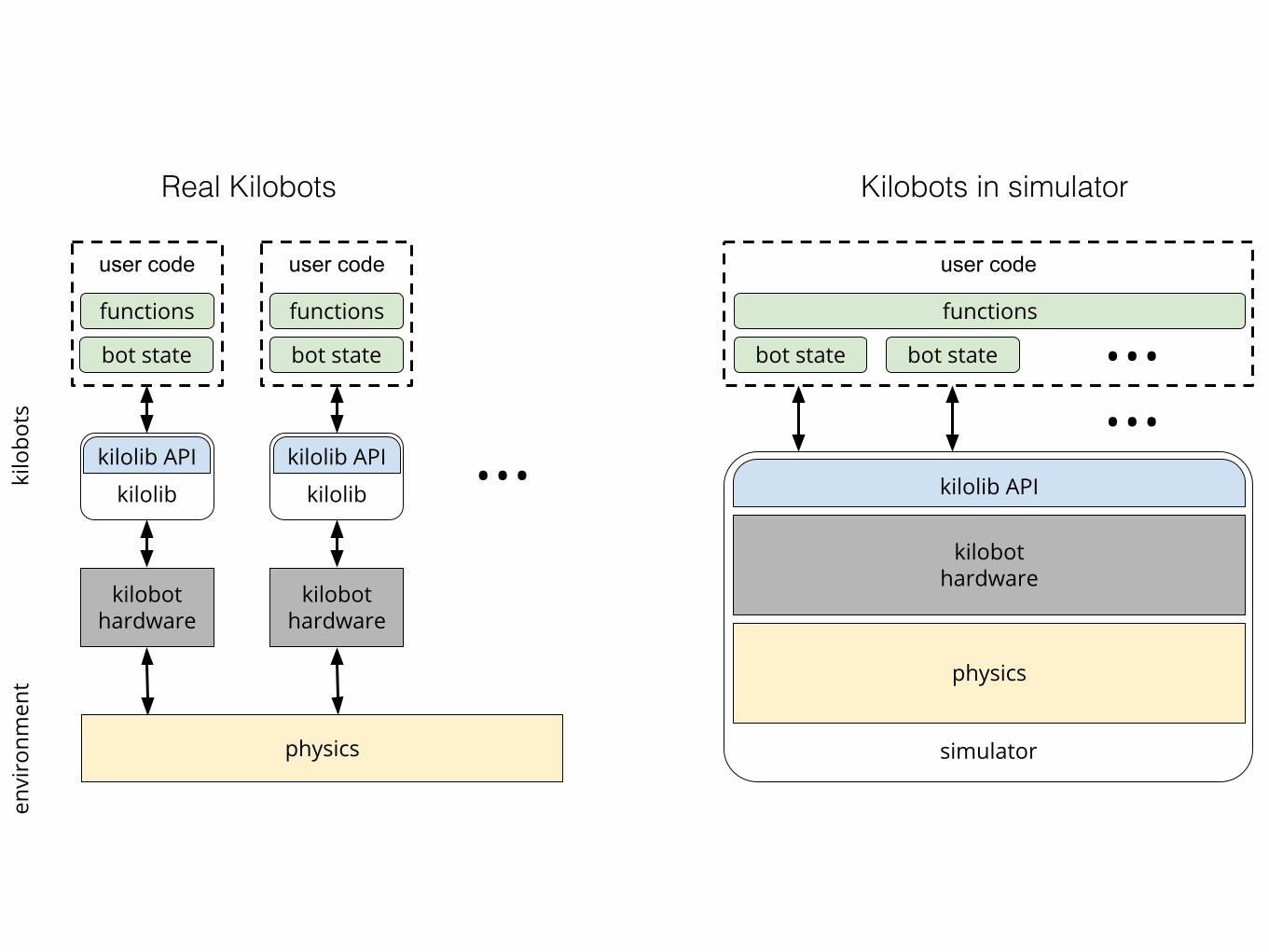
user code
functions
simulator
user code
kilobothardware
...kilo
bots
physics
envi
ronm
ent
kilolib
kilolib APIkilolib API
bot state
functions
kilobothardware
physics
bot state
user code
kilobothardware
kilolib
kilolib API
bot state
functions
...functions
bot state ...
Real Kilobots Kilobots in simulator
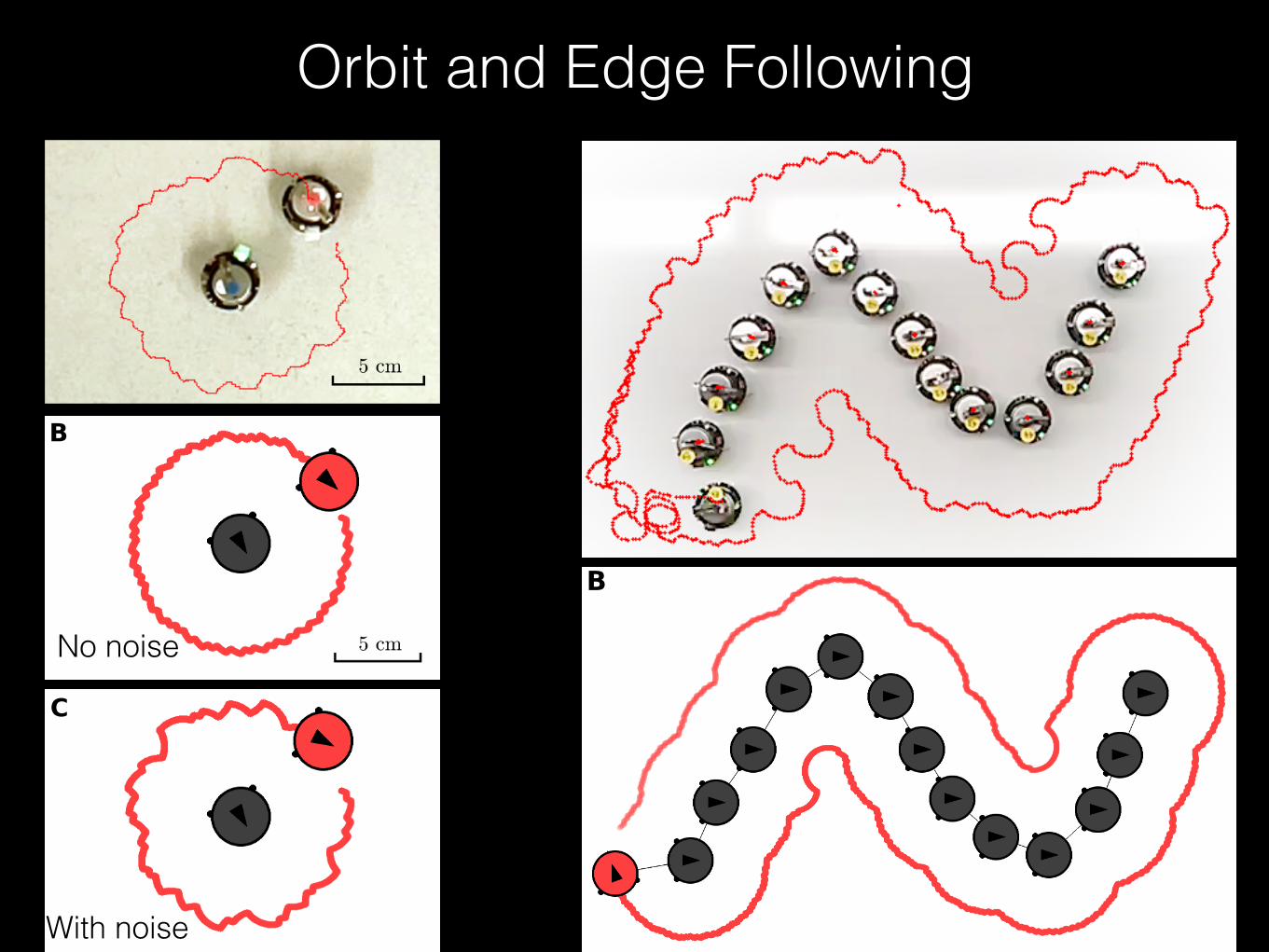
Orbit and Edge FollowingA
B
A
B
C
No noise
With noise
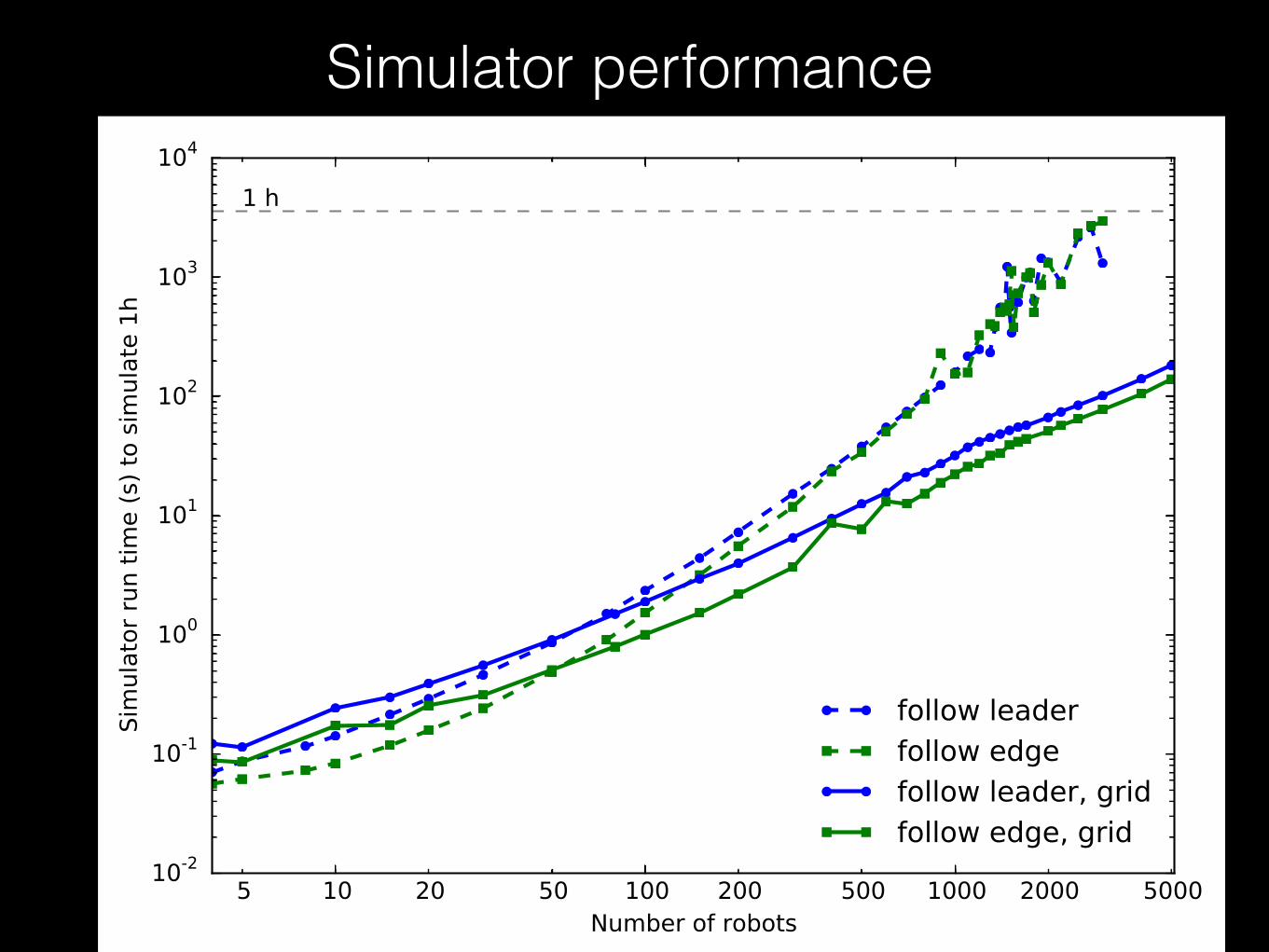
Simulator performance
Lessons I learned• git - version control
• communication
• programming for users
• documentation
• examples
• changes may have consequences for everyone
• good naming
• importance of working on the same code base
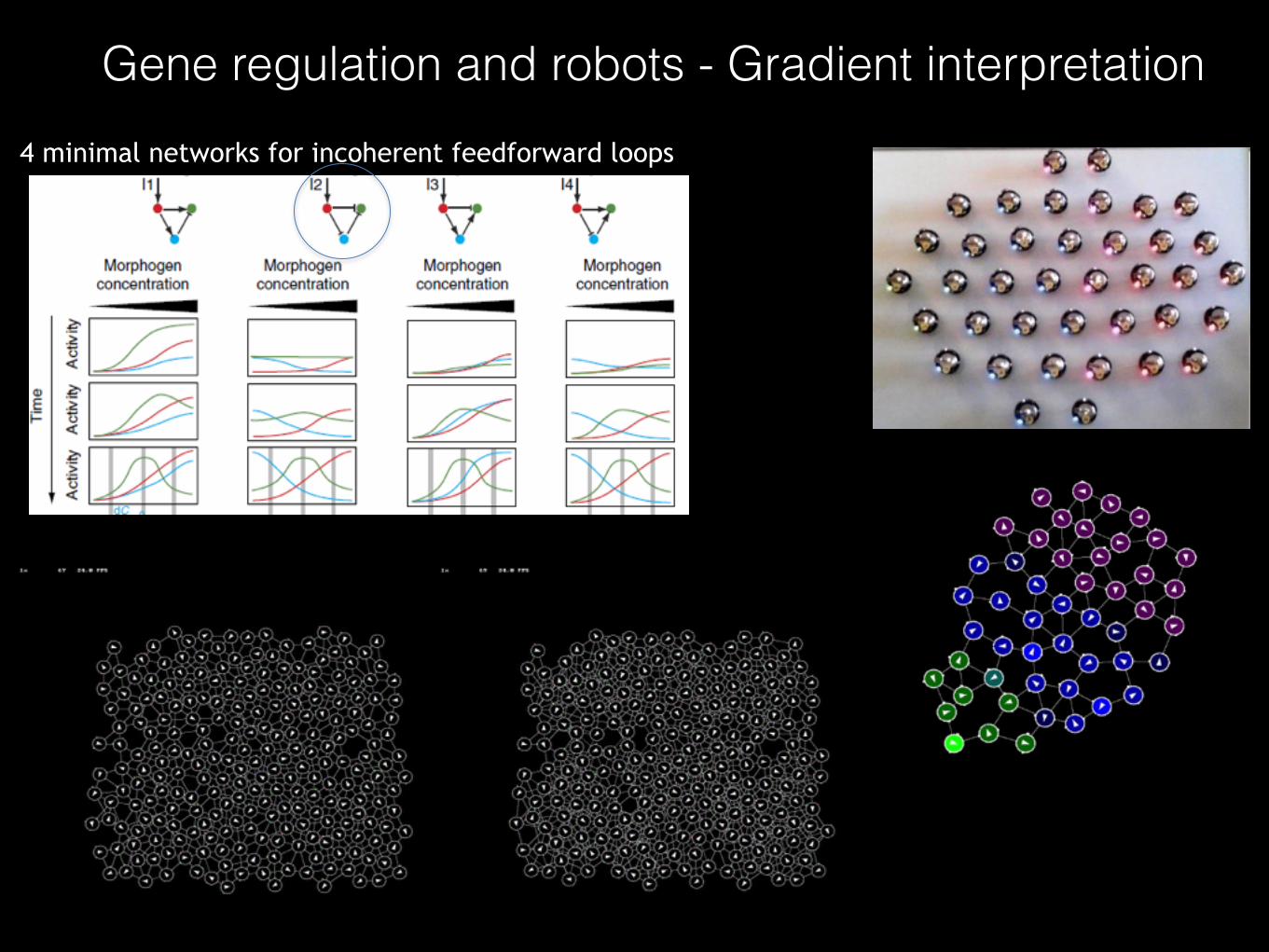
Gene regulation and robots - Gradient interpretation4 minimal networks for incoherent feedforward loops
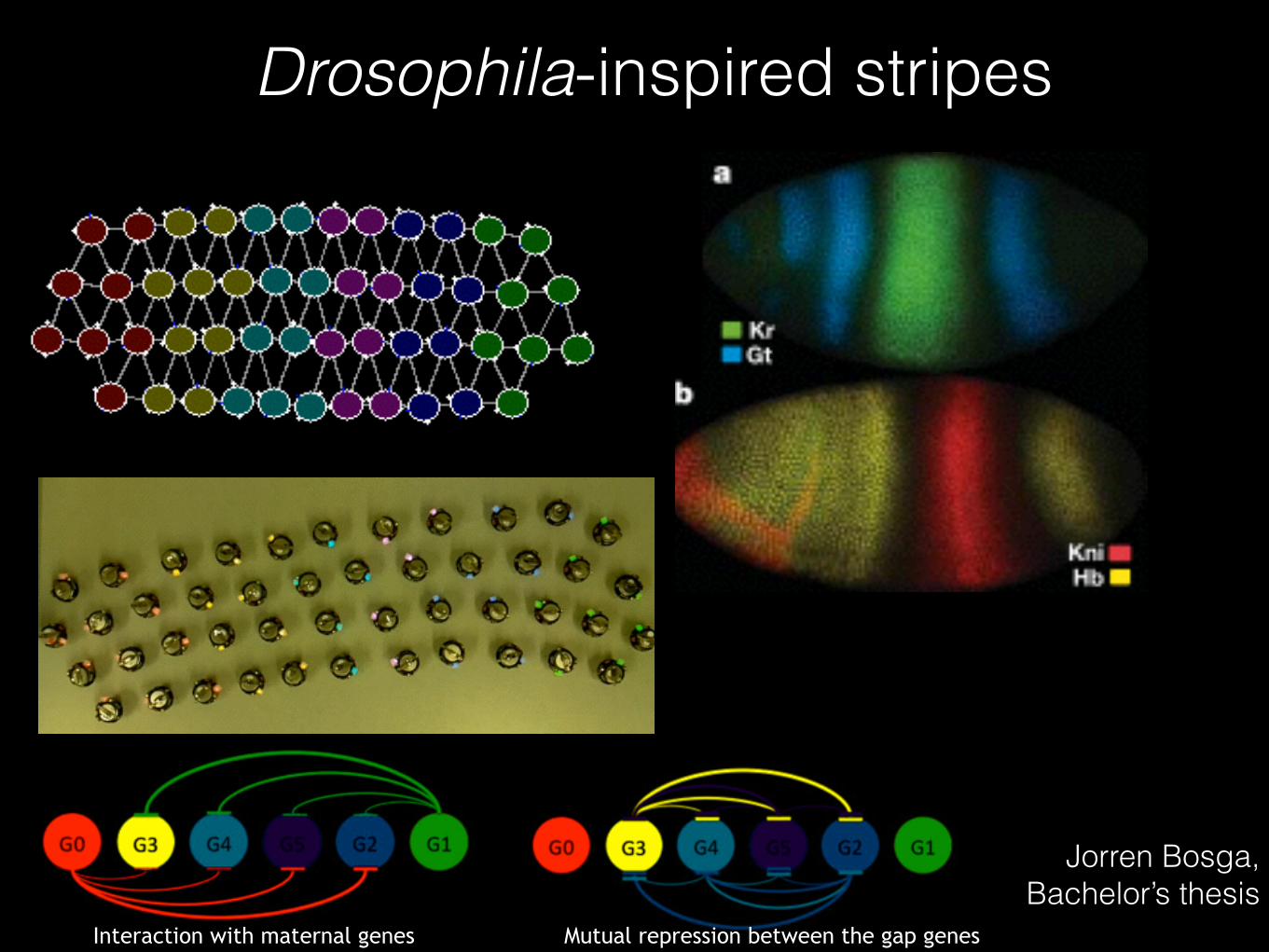
Drosophila-inspired stripes
Interaction with maternal genes Mutual repression between the gap genes
Jorren Bosga, Bachelor’s thesis
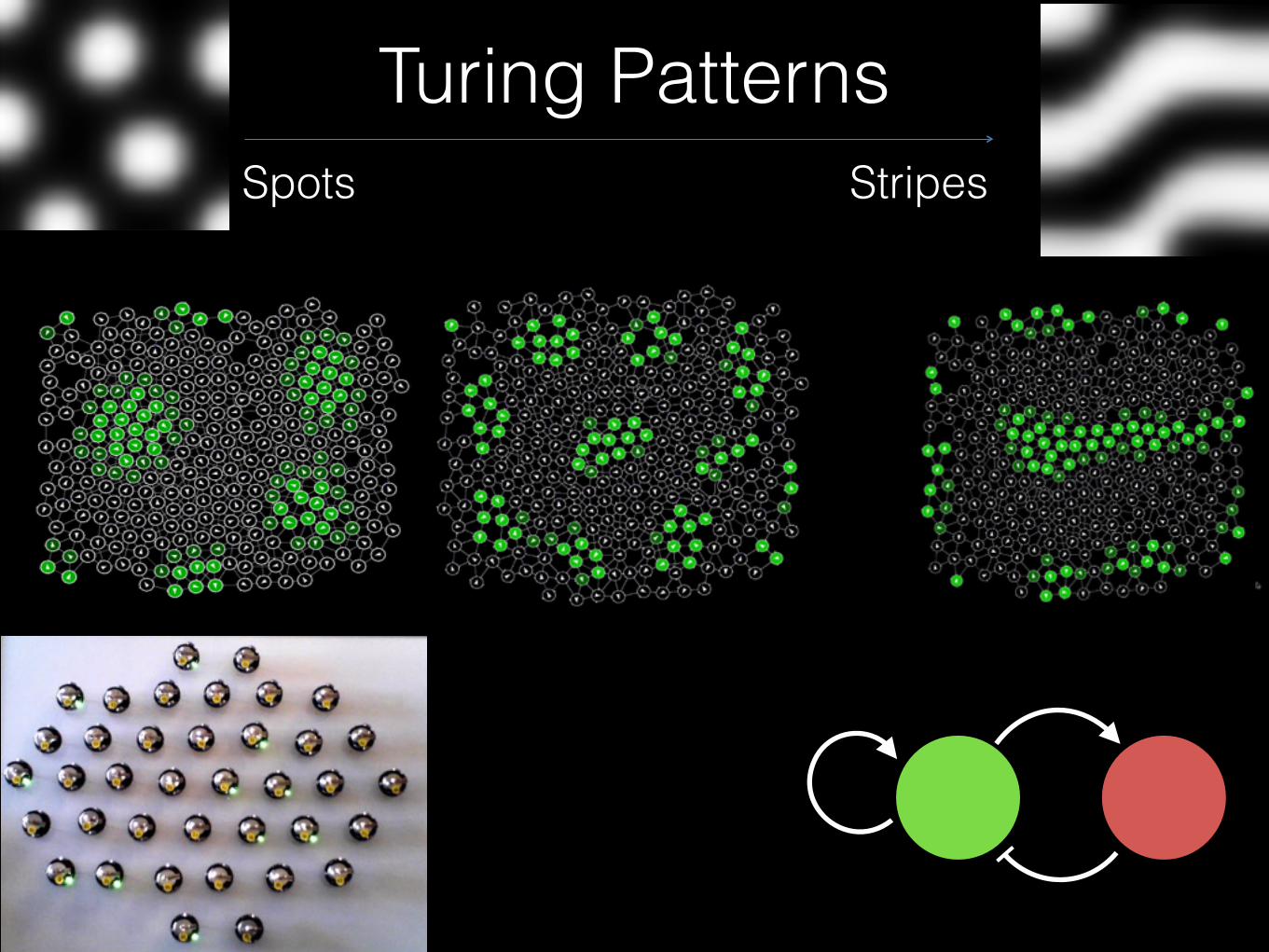
Turing PatternsSpots Stripes
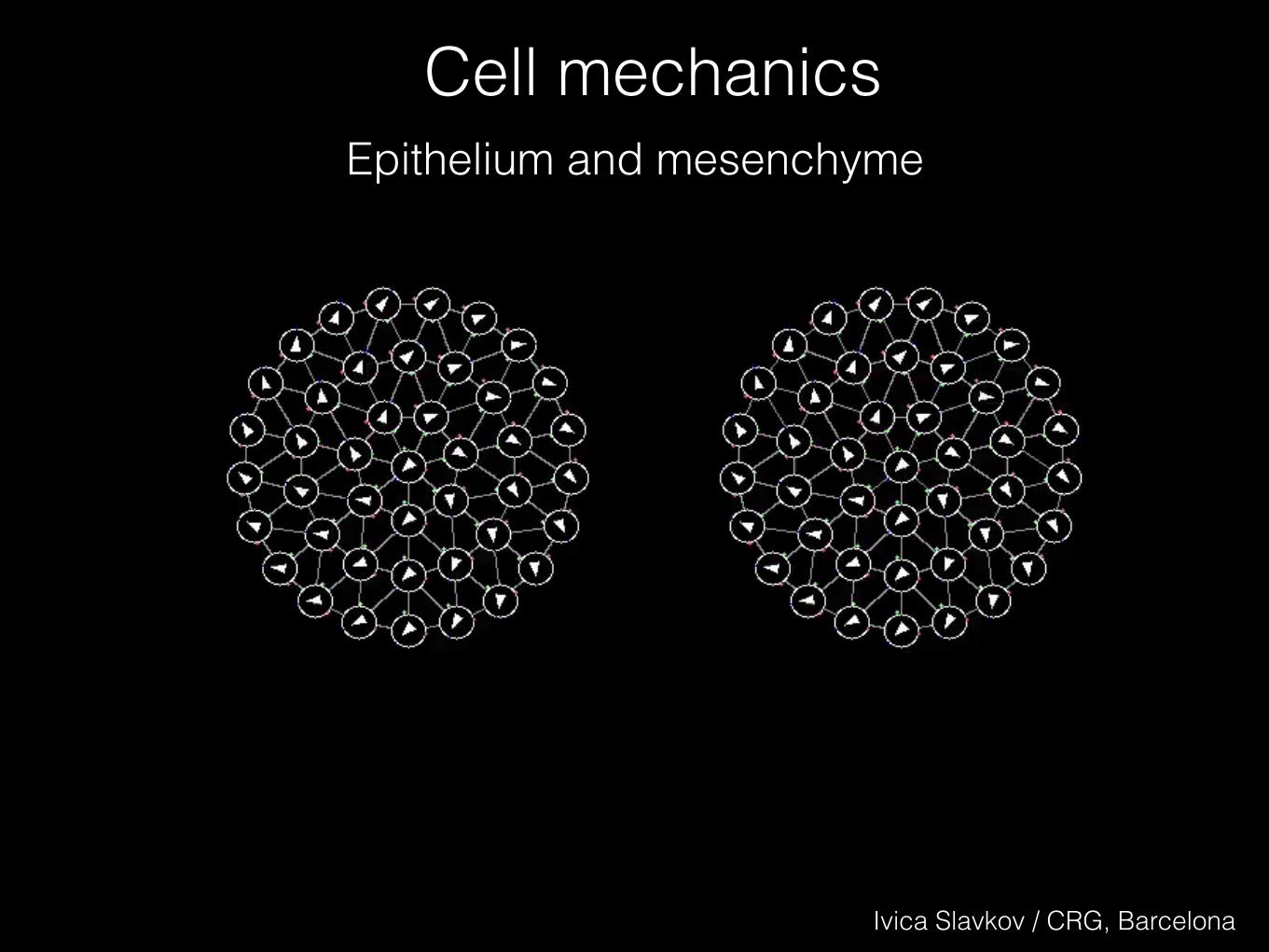
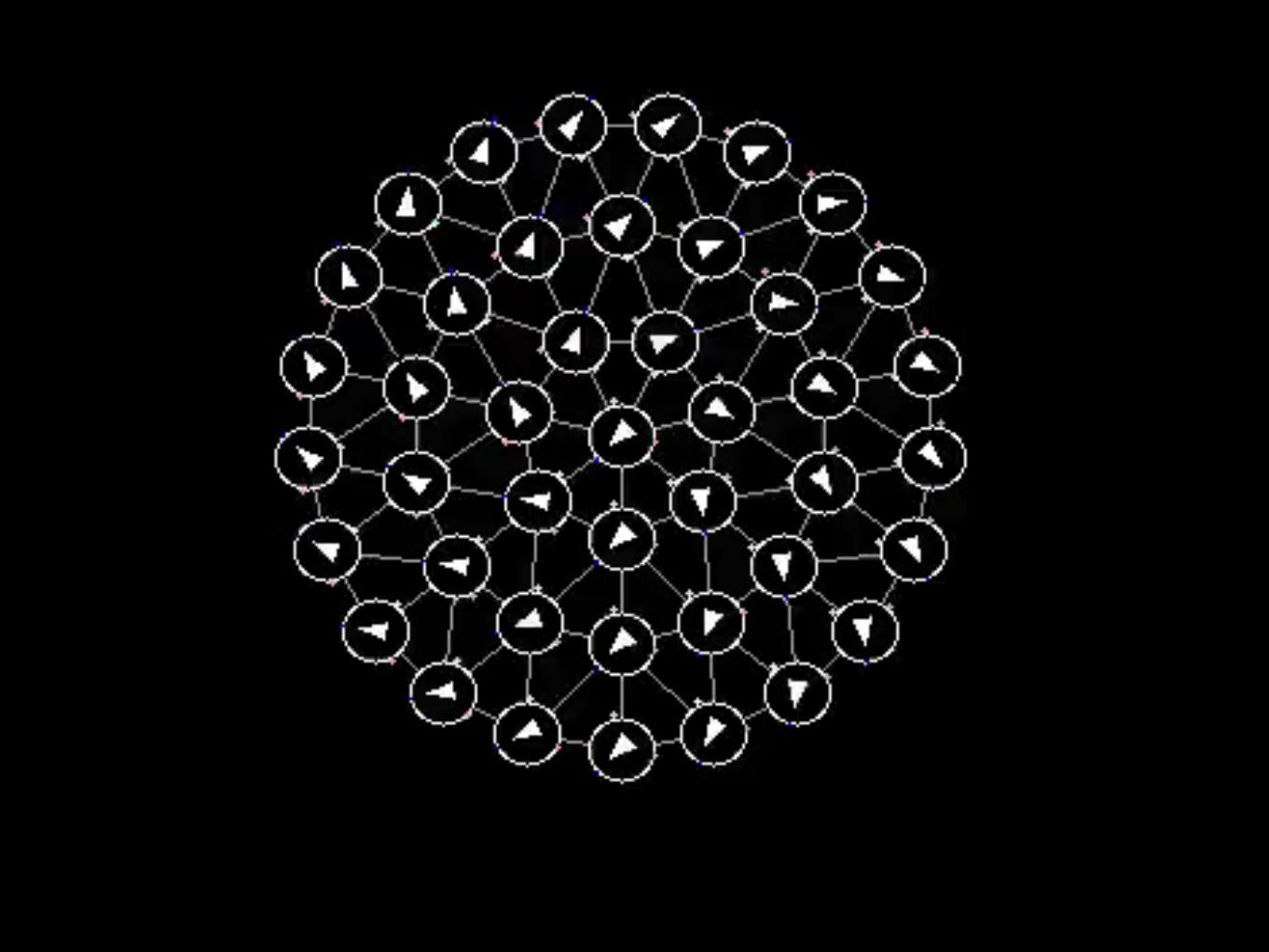
Cell mechanicsEpithelium and mesenchyme
Ivica Slavkov / CRG, Barcelona
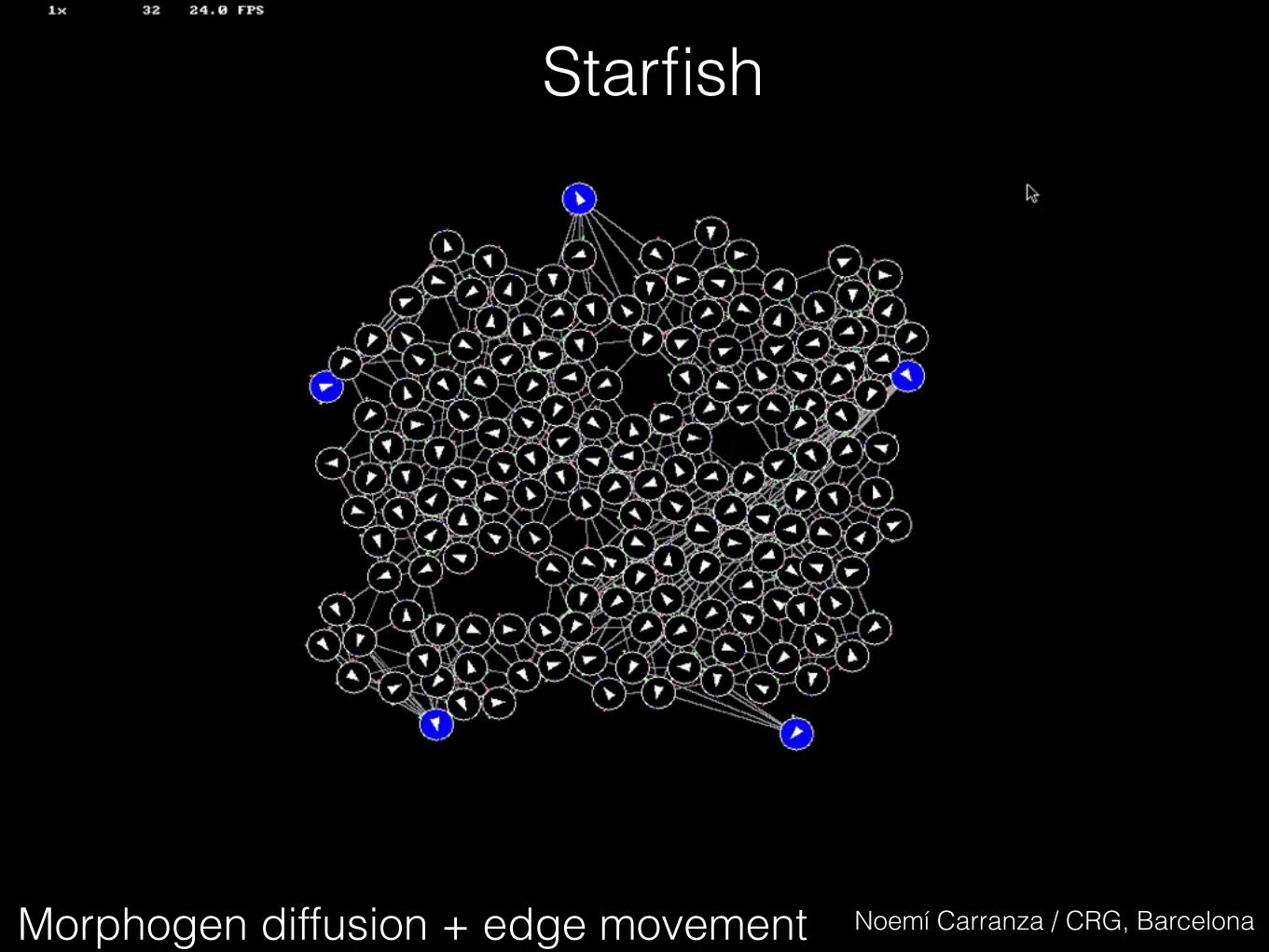
Starfish
Morphogen diffusion + edge movement Noemí Carranza / CRG, Barcelona
Light-seeking Slime MouldDictyostelium - amoeba
Verônica Grieneisen Ivica Slavkov James Sharpe Noemí Carranza
Tjelvar Olsson Jaap Kaandorp Fredrik Jansson Stan Marée
Roland Dries Johanna Grönqvist Martin Hinsch Matthew Hartley





























