Embed Size (px)
Citation preview
B.Tech Industrial Training Presentation onEMBEDDED SYSTEM AND ROBOTICS
Presented
PALLAVI BHARTI
20130549
E&C Engg. Dept., SMIT
Under the Supervision of
MR.ROHAN SINGH
TRAINING HEAD
Contents • Introduction to Embedded Systems
• Types & Applications
• Microcontroller
• IDE & Programmer
• I/O function registers
• LCD interfacing
• ADC
• Communication
• Introduction to Robotics
• History and Laws of Robotics
• How robot moves?
• Sensors
• Conclusion
INTRODUCTION TO EMBEDDED SYSTEMS
It is a scaled down computer which is
designed to perform a specific task
only/operation.
Am embedded system is a software
program on a hardware chip designed
for specific purpose and can also
contain some moving parts
‘Embedded’ means whole system
embedded(implanted) onto an
appliance

Types & Applications Embedded systems
Non-real time embeddedsystem: no deadline
• Security systems
• Mobile phones
• Alarm system
• Digital camera
Real time embeddedsystem: deadline to be met
Sensor system in nuclear plants
Missile defense system
Flight control system
PROPERTIES OF EMBEDDED
SYSTEMS Small in size
Low cost
High accuracy
Easy to design
Low power required
Portable
Efficient
APPLICATIONS OF EMBEDDED
SYSTEMS
Security system, Cell phone, Automobile system,
Memory storage device, Calculators , Printer ,
Mouse , Alarm system
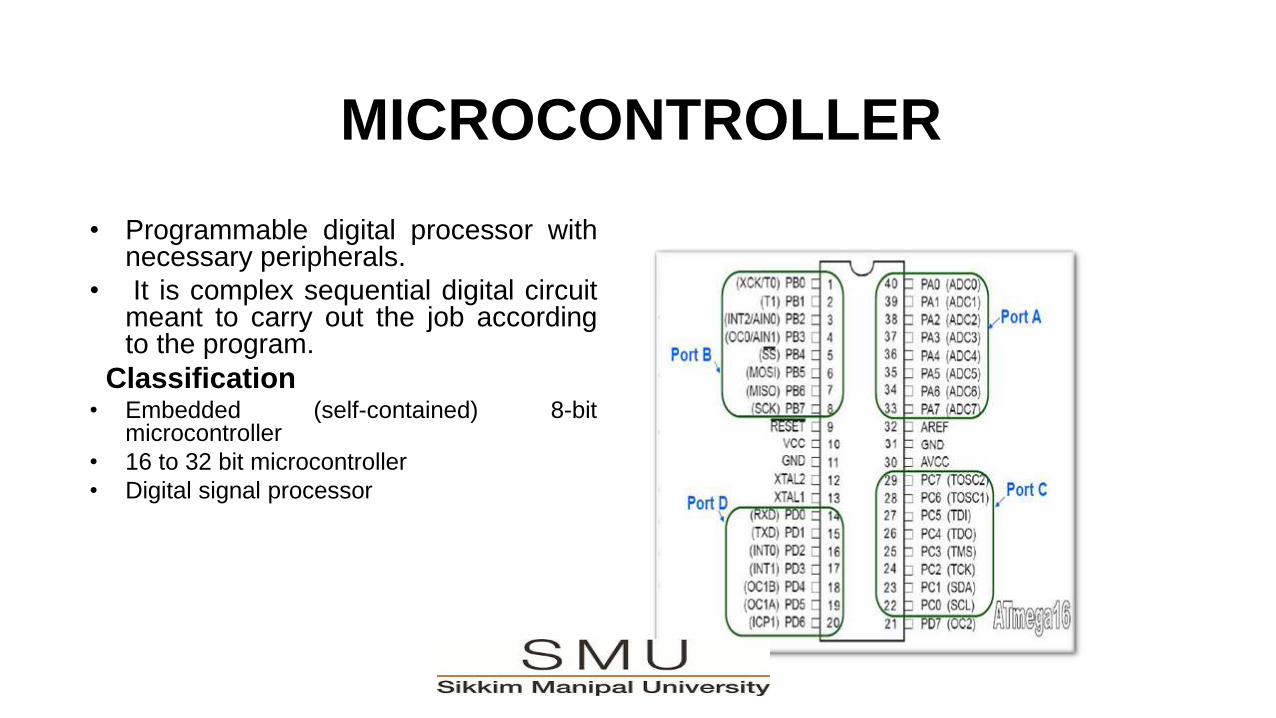
MICROCONTROLLER
• Programmable digital processor withnecessary peripherals.
• It is complex sequential digital circuitmeant to carry out the job accordingto the program.
Classification• Embedded (self-contained) 8-bit
microcontroller
• 16 to 32 bit microcontroller
• Digital signal processor
Features:• Built in monitor
program
• Built in programmemory
• Facility to interfaceexternal memory
• Interrupts
• Analog I/O
• Serial I/O
• Timers
IDE AND PROGRAMMER
Some compilers are:
• WINAVR
• Code vision AVR
• AVR studio
• Parts of programmer:
Software(to open .hex file on the computer)
• Avr dude
• Avr studio
• Atprog
Hardware
• Usb-asp(sub)

I/O PORTS
• DDRX(data direction register)
• PORT X
• PINX
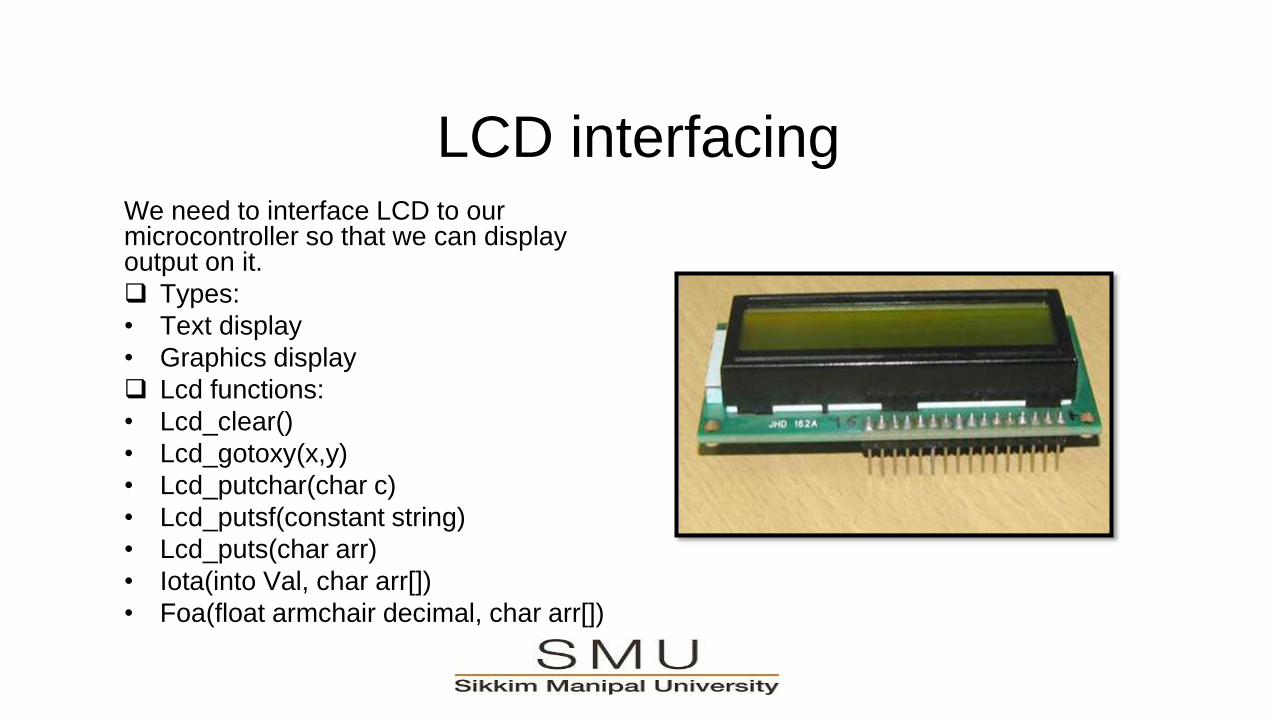
LCD interfacingWe need to interface LCD to our microcontroller so that we can display output on it.
Types:
• Text display
• Graphics display
Lcd functions:
• Lcd_clear()
• Lcd_gotoxy(x,y)
• Lcd_putchar(char c)
• Lcd_putsf(constant string)
• Lcd_puts(char arr)
• Iota(into Val, char arr[])
• Foa(float armchair decimal, char arr[])
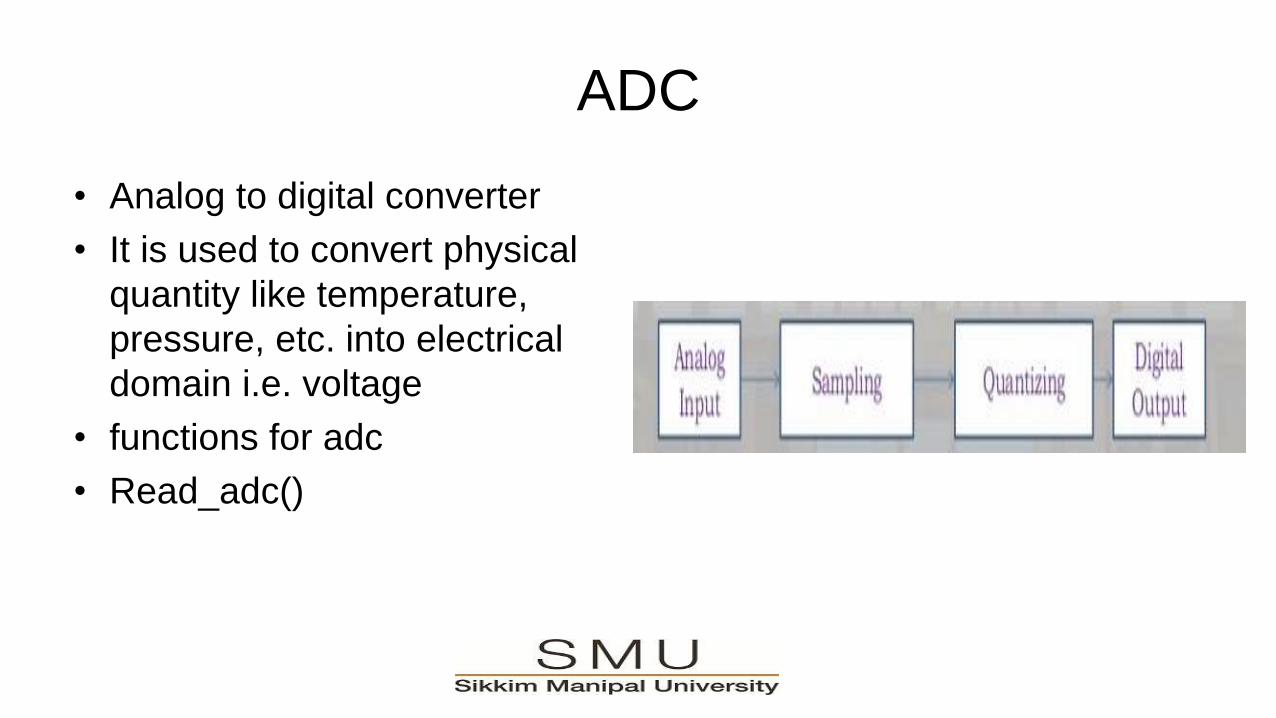
ADC
• Analog to digital converter
• It is used to convert physical
quantity like temperature,
pressure, etc. into electrical
domain i.e. voltage
• functions for adc
• Read_adc()
TimersIt is a register which is used to measure time interval
Timers in Atmega 16:
• Timer 0(8 bit)
• Timer 1(16 bit)
• Timer (8 bit)
Timer modes:
• Normal
• PWM(pulse width modulation)
• CTC(clear timer on compare)
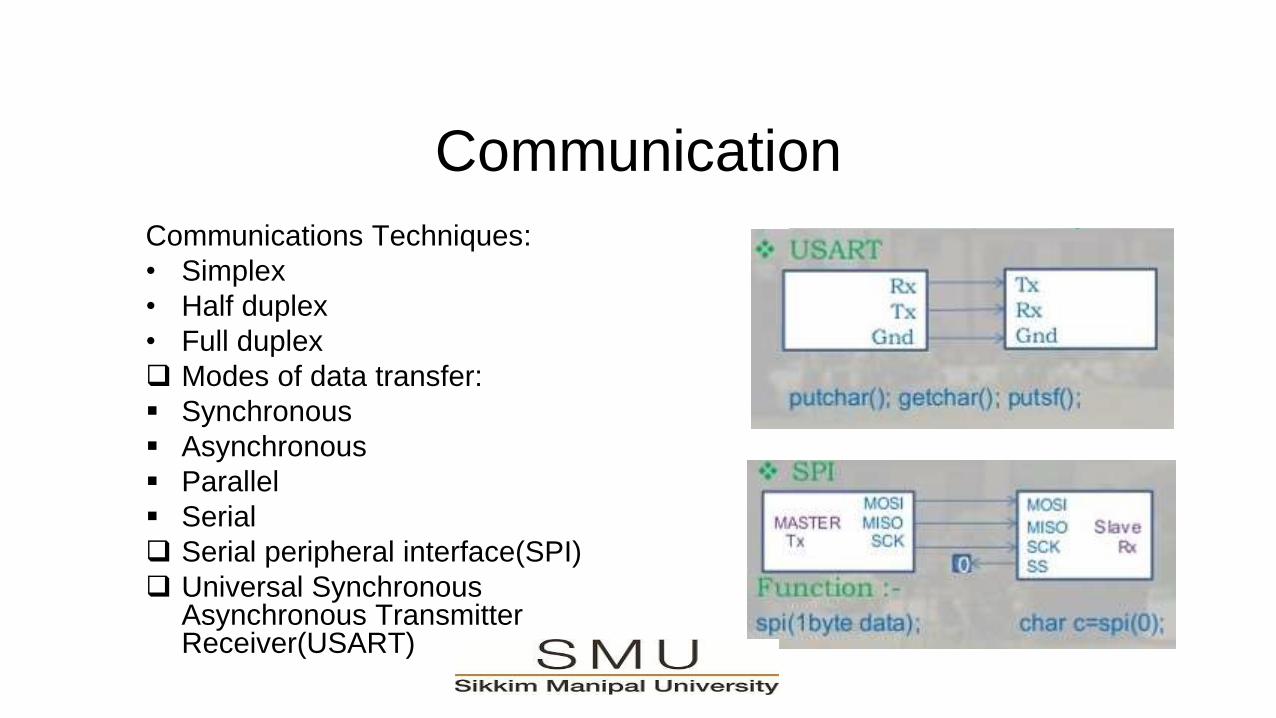
Communication
Communications Techniques:
• Simplex
• Half duplex
• Full duplex
Modes of data transfer:
Synchronous
Asynchronous
Parallel
Serial
Serial peripheral interface(SPI)
Universal Synchronous Asynchronous Transmitter Receiver(USART)
Interrupt
It is a signal that stops the
current program and forces the
execution of another program
• Types:
Mask able
Non mask able
Hardware
Overflow
Compare match
3 external Interrupts in
Atmega16:
• INT0: PD2, Pin 16
• INT1: PD3, Pin 17
• INT2: PB2, Pin 3
Introduction to Robotics • Robotics is the science of
designing and building Robots
Robot
• Re-programmable multi-functional manipulator designed to move materials, parts, tools or specialized devices to programmed motions
• Name ROBOT derived from Czechoslovakian word Robota meaning ‘compulsory labour’
• ‘Unimation’ –Joe Engleberger-Father of Robotics
Essential characteristics:
• Mobility
• Flexibility
• Programmability
• Mechanical capability
• Sensors
Laws of RoboticsIsaac Asimov’s, 1940 ‘robotics’
1. A robot must not injure human being, or, through inaction, allow a human being to come to harm.
2. A robot must obey the orders given it by human being, except where such orders would not conflict with the first law.
3. A robot must protect its own existence as long as it doesn’t conflict with law 1st and 2nd.
Basic elements for building autonomous robot.
• Robot chassis and actuators: body and wheels arrangement.
• Electronics: includes Sensors, motion control circuits, power management system etc.
• Power Source :Usually batteries or direct supply through wire.
• Intelligence: is achieved by using Microcontroller.
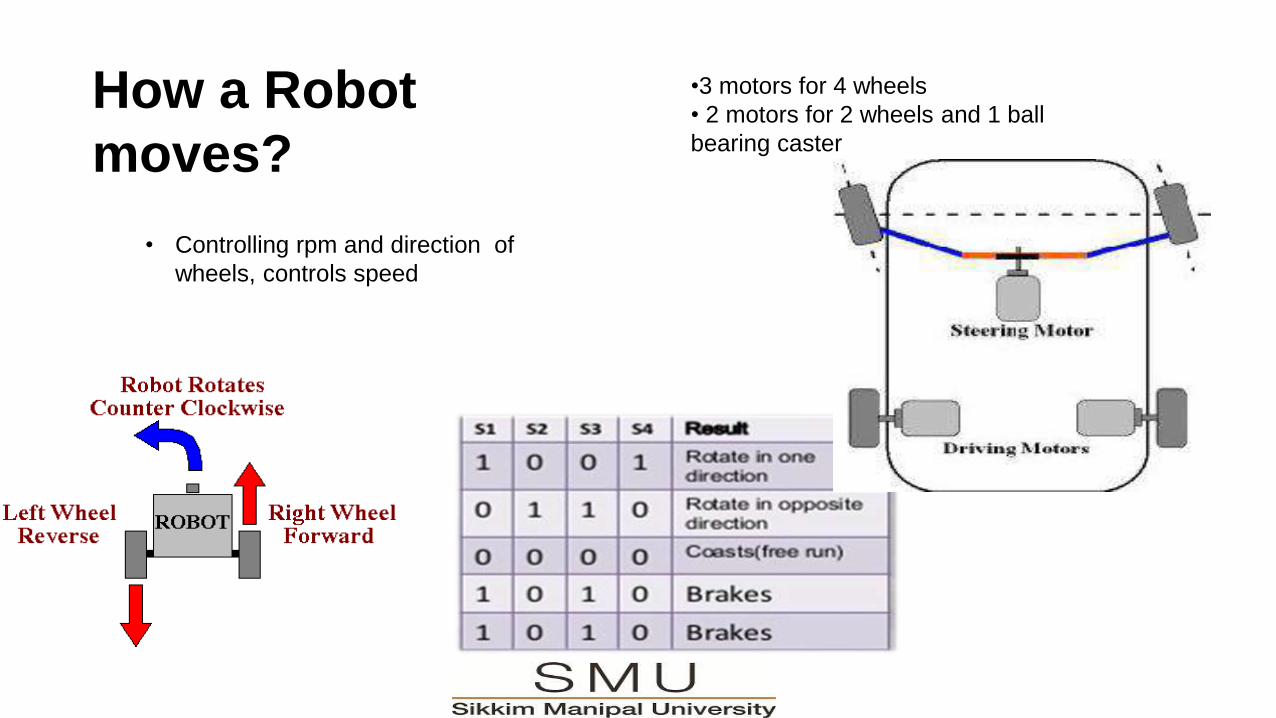
How a Robot
moves?
• Controlling rpm and direction of
wheels, controls speed
•3 motors for 4 wheels
• 2 motors for 2 wheels and 1 ball
bearing caster
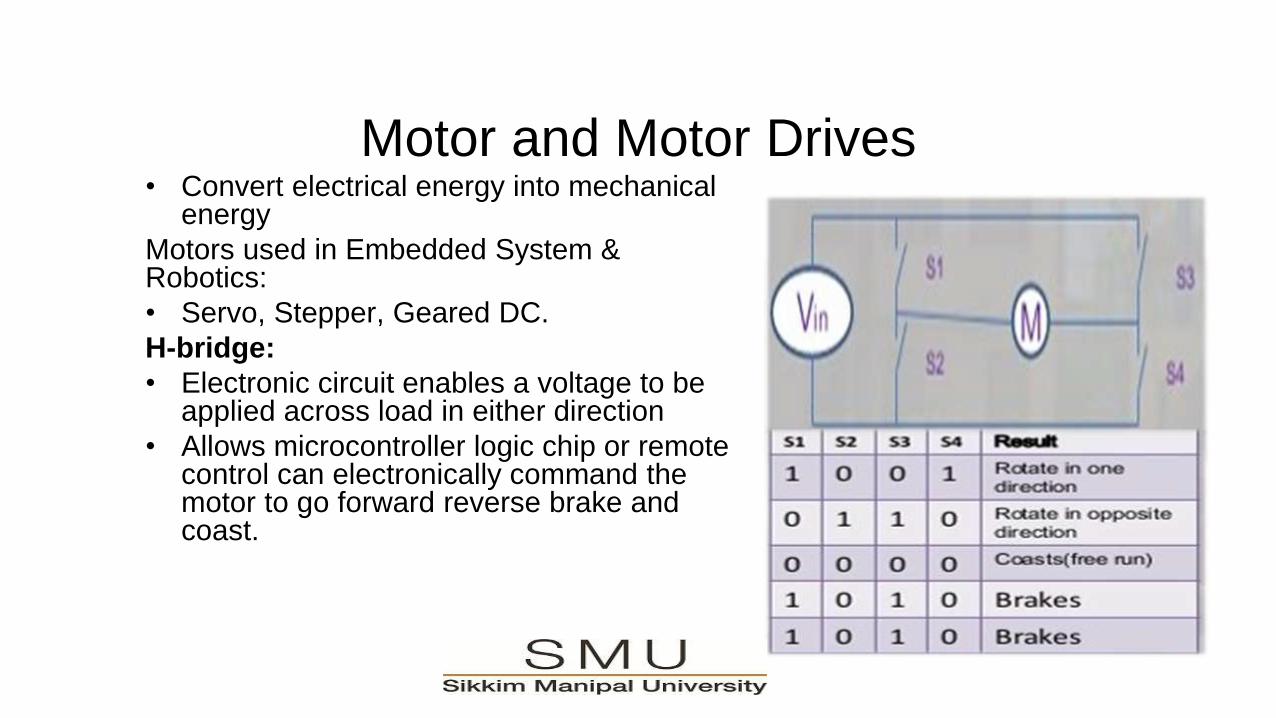
Motor and Motor Drives• Convert electrical energy into mechanical
energy
Motors used in Embedded System & Robotics:
• Servo, Stepper, Geared DC.
H-bridge:
• Electronic circuit enables a voltage to be applied across load in either direction
• Allows microcontroller logic chip or remote control can electronically command the motor to go forward reverse brake and coast.
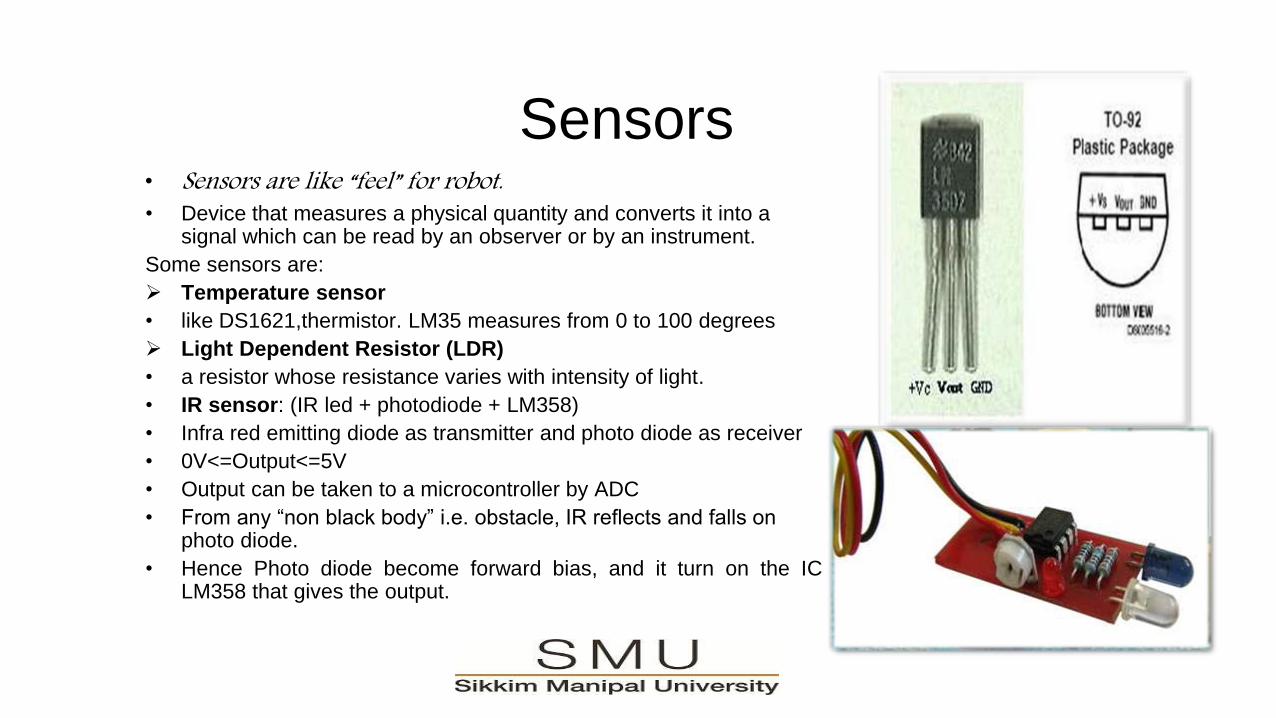
Sensors • Sensors are like “feel” for robot.• Device that measures a physical quantity and converts it into a
signal which can be read by an observer or by an instrument.
Some sensors are:
Temperature sensor
• like DS1621,thermistor. LM35 measures from 0 to 100 degrees
Light Dependent Resistor (LDR)
• a resistor whose resistance varies with intensity of light.
• IR sensor: (IR led + photodiode + LM358)
• Infra red emitting diode as transmitter and photo diode as receiver
• 0V<=Output<=5V
• Output can be taken to a microcontroller by ADC
• From any “non black body” i.e. obstacle, IR reflects and falls on photo diode.
• Hence Photo diode become forward bias, and it turn on the ICLM358 that gives the output.
Conclusion
• electronics + mechanics +
software = ROBOT
• Efficient
• Reliable
• Interaction with environment
• Multi Tasking
• Favor for Mankind, if Used wisely

References • www.google.com
• www.wikipedia.com
Google images
• http://www.embeddedsystem.com/
• http://robotics.nasa.gov/
• www.cmosexod.com
• www.best-microcontrollerprojects.com
• Handouts given by the organization

Thank You